小区域高程控制测量
小区域控制测量

小区域控制测量一、实验目的通过本次实验,使学生在掌握水准仪、经纬仪的工作原理、操作方法,水准尺、钢尺、测钎、标杆等工具的使用,及掌握某地面点的高程、水平距离和角度的测量的基础上。
能较熟练地利用这些知识、工具进行某小区的测绘并能准确对测量后的数据处理、绘出小区平面图,掌握测绘的方法和步骤,为以后的工程测量工作打下良好的基础。
一、实验原理在测量工作中,为了限制误差的传播,满足测图或施工的需要,使分区的测图能拼接成整体,或使整体的工程能分区施工放样,这就必须遵循测量工作的原则,即:“从整体到局部”、“先控制后碎部”。
也就是说,在作局部测量或碎部测量之前,先要进行整体的控制测量。
控制测量指的是在整个测区范围内测定一些起控制作用的点的精确位置,以统一全测区的测量工作。
它分平面控制测量和高程控制测量两种:测定控制点平面位置X、Y的的工作,称为平面控制测量;测定控制点高程的工作,称为高程控制测量。
1、平面控制测量国家平面控制网的常规布设方法主要有三角网和导线网两钟。
按其精度分成一、二、三、四等。
其中一等网精度最高,逐级降低;而控制的密度,则是一等网最小,逐级增大。
如图,一等三角网一般称为一等三角锁,它在全国范围内,沿经纬线方向布设,是国家平面控制网的骨干。
它除作扩展低等平面控制网的基础之外,还为测量学科研究地球的形状和大小提供精确数据。
二等三角网布设于一等三角锁环内,是国家平面控制网的全面基础。
三、四等网是二等网的进一步加密,以满足测图和各项工程建设的需要。
在某些局部地区,如果采用三角测量有困难时,也可用同等级的导线测量代替。
其中一、二等导线测量,又称为精密导线测量。
城市平面控制网布设也分为二、三、四等三角网(亦即上述国家平面控制的二、三、四等)和一二级小三角网,或一、二、三级导线网,最后再布设直接为测绘大比例尺图所用的图根小三角和图根导线。
小区域平面控制网,可根据测区面积的大小分级建立测区首级控制和图根控制。
小地区高程控制测量
小区域控制测量
小区域控制测量分为两种方法:1.三、四等水准测量
2.三角高程测量
三、四等水准测量的作业方法
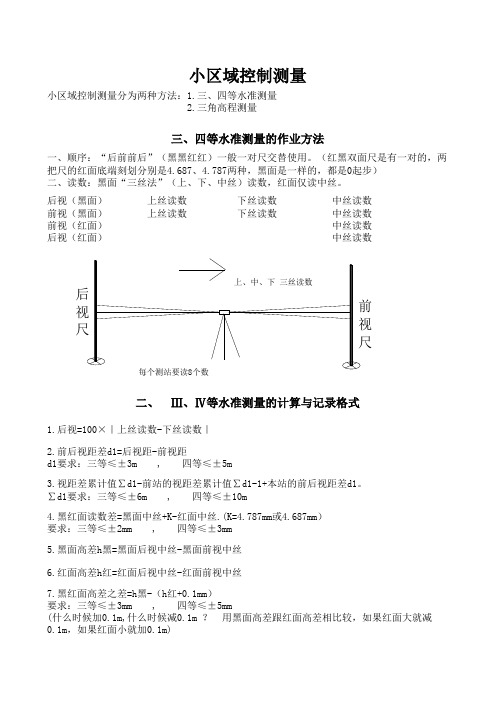
一、顺序:“后前前后”(黑黑红红)一般一对尺交替使用。
(红黑双面尺是有一对的,两把尺的红面底端刻划分别是4.687、4.787两种,黑面是一样的,都是0起步)
二、读数:黑面“三丝法”(上、下、中丝)读数,红面仅读中丝。
后视(黑面) 上丝读数 下丝读数 中丝读数
前视(黑面) 上丝读数 下丝读数 中丝读数
前视(红面) 中丝读数
后视(红面) 中丝读数
二、 Ⅲ、Ⅳ等水准测量的计算与记录格式
1.后视=100×|上丝读数-下丝读数|
2.前后视距差d1=后视距-前视距
d1要求:三等≤±3m , 四等≤±5m
3.视距差累计值∑d1-前站的视距差累计值∑d1-1+本站的前后视距差d1。
∑d1要求:三等≤±6m , 四等≤±10m
4.黑红面读数差=黑面中丝+K-红面中丝.(K=4.787mm或4.687mm)
要求:三等≤±2mm , 四等≤±3mm
5.黑面高差h黑=黑面后视中丝-黑面前视中丝
6.红面高差h红=红面后视中丝-红面前视中丝
7.黑红面高差之差=h黑-(h红+0.1mm)
要求:三等≤±3mm , 四等≤±5mm
(什么时候加0.1m,什么时候减0.1m ? 用黑面高差跟红面高差相比较,如果红面大就减0.1m,如果红面小就加0.1m)
8.高差中数=[h黑+(h红+0.1m)]/2
9.水准路线总长L=∑后视距+∑前视距。
小地区控制测量

二、国家控制网
平面:国家平面控制网由一、二、三、四等三角网 (triangulation network)组成。
高程:国家高程控制网是由一、二、三、四等水准 网(leveling network)组成。
国家控制网的特点:高级点逐级控制低级点。
图形1:国家一、二等平面控制网布置形式
一等三角网
二等三角网
3.支导线(open traverse) 支导线的点数不宜超过2个,仅作补点使用。
图形:导线的布设形式
附合导线
闭合导线
支导线
单结点导线(导线网)
三、导线的外业
1.踏勘选点及建立标志 2.测水平角 3、量水平边长 4、测连接角、连接边
要求:
相邻导线点要通视 便于量距、架设仪器 具有控制意义 边长符合规范规定(特别注意避免短边)
点 号
观测角
改
正 数
坐标方位 角
距离
坐标增量 改正后的
△x
△ y
△x
△ y
坐标值
x
y
1
2 107 48 30 +13 125 30 00 105.22 53 18 43 80.18
3 73 00 20 +12 4 89 33 50 +12 306 19 15 129.34
215 53 17 78.16 1 89 36 30 +13
2
125 30 00
-61.10 +47.90 +76.61 -63.32
500.00 500.00
∑ 359 59 10 +50
392.90 +0.09
f 3595910 3600000 50 f容 60 4 120
测量学6小地区控制测量

二、国家控制 网的概念
为了统一全国各地区的测量工作,必须进行全国性的 控制测量,以建立国家控制网,供整个国民经济规划 和国防建设等使用。国家控制网分平面控制网和高程 控制网。
国家平面控制网
国家平面控制网主要是采用三角测量方法建立的,即 在全国范围内将控制点组成一系列的三角形,通过测 定所有三角形的内角,推算出各控制点的坐标。国家 控制网也是按照“由高级到低级、由整体到局部”的 原则布设的。国家平面控制网按其精度可分为一、二、 三、四等四个等级。
根据坐标方位角的定义,它是 从坐标轴北端开始顺时针旋转 至某边的水平角。因此有相同 端点的两条边,右侧边的坐标 方位角就等于左侧边的坐标方 位角加上两边之间的夹角,同 一条边的正反方位角相差180°。 即沿导线前进方向:
1
4
上式中包含具相同端点两条边 的方位角关系以及正反方位角 的关系。
2
3
5
α前=α后-180°+β左 =α后+180°-β右。
(四) 起始边方位角的测定
与高级已知点连接的导线,因有已知边方 位角,只需观测连接角便可以推算各边的 方位角,然后推算各点的坐标。对于不与 高级已知点相连接的闭合导线,则可用罗 盘仪测定一条起始边的磁方位角,便可推 算其他各边的方位角,并推算各点的坐标。
(五) 导线测量记录
导线测量的外业记录有规定的表格。
二、 经纬仪附合导线计算 附合导线计算角度闭合差和坐标增量闭合差的公式
不同。 (一) 角度闭合差的计算与调整
附合导线的角度闭合差为从一已知边方位角出发, 使用观测角推算至另一条已知边,推算方位角与已知 方位角之差。 (二) 坐标方位角的推算
推算出的已知边的坐标方位角应与已知值相同,以 此作为计算的检核。 (三) 坐标增量的计算 根据导线各边的方位角和边长,计算各坐标增量,计 算方法与闭合导线相同。
第六章 小地区控制测量

• 2、高程控制测量 • 国家高程控制网的建立主要采用水准测量 的方法,按精度同样可分为一、二、三、 四等。
作用:全国范围内施测各种比例尺地形图 的高程控制基础,以及一些科学研究如地 壳垂直形变规律、各海洋平均海水面的高 度变化,以及其他有关地质和地貌的研究 等。
第二节、导线测量 一、导线测量概述 导线:将相邻控制点连成直线而构成的连续折线称为导 线 ,转折点称为导线点,各段折线称为导线边。 导线测量是依次测定导线边的水平距离和两相邻导线边 的水平夹角,然后根据起算数据,推算各边的坐标方位 角,最后求出导线点的平面坐标。 导线的布设形式有三种: 1、闭合导线 2、附合导线 3、支导线三种。
• • • • •
控制测量分为: 1、平面控制测量:测定控制点的平面位置。 2、高程控制测量:测定控制点的高程。 一、平面控制测量 选点布网,测定控制点的平面位置(X,Y)的工作, 称为平面控制测量。 • 国家平面控制网是在全国范围内建立的控制网, 主要有两种:三角网和导线网。按其精度分成 一、二、三、四等四个等级,其中一等网精度 最高,逐级降低。而控制点的密度,则是一等 网最小,逐级增大。
• 四、坐标的正算和反算 • (一)极坐标化为直角坐标(坐标正算) • 已知两点间的边长和坐标方位角,计算坐标增量:
• •
ΔX12=D12×cos α12 ΔY12=D12×sinα12
• (二)直角坐标化为极坐标(坐标反算)
D12
X
2 12
Y 12
2
Y 12 12 arctan X 12
程序运算(P125例题) Shift CLR 1 EXE Prog 1 B? 310°24′45″EXE A? 89°34′03″ EXE A? 78.16 EXE EXE EXE A? 118°00′16″ EXE A? 117.821 EXE EXE EXE A? 105°56′04″ EXE A? 141.309 EXE EXE EXE A? 104°30′21″ EXE A? 121.823 EXE EXE EXE A? 114°34′34″ EXE A? 139.361 EXE 显示 fX=0.0018 EXE 显示fY=0.0024 Ac Prog 2 显示f =0.00238 EXE 显示M=27477.7 (K=1/M) EXE 显示 0→M Ac 500 Shift STO X 500 Shift STO Y Prog 1 B? 171°31′15″EXE A? 96°58′45″ EXE A? 133.332
第6章小区域控制测量

2021年7月30日星期五
第一节 控制测量概述
一、控制测量的概念
1.控制网
在测区范围内选择若干有控制意义的点(称为 控制点),按一定的规律和要求构成网状几何图形, 称为控制网。
控制网分为平面控制网和高程控制网。
2.控制测量
测定控制点位置的工作,称为控制测量。
测定控制点平面位置(x、y)的工作,称为平 面控制测量。
测定控制点高程(H)的工作,称为高程控制 测量。
控制网有国家控制网、城市控制网和小地区控 制网等。
二、国家控制网
在全国范围内建立的控制网,称为国家控制 网。它是全国各种比例尺测图的基本控制,并为确 定地球形状和大小提供研究资料。
国家平面控制网,主要布设成三角网,采用三 角测量的方法。
国家高程控制网,布设成水准网,采用精密水 准测量的方法。
457.68 m
yB yA DAB sin AB
658.82 m135.62 m sin 803654
792.62 m
2.坐标反算
根据直线起点和终点的坐标,计算直线的边长 和坐标方位角,称为坐标反算。 *
DAB
xA2B
y
2 AB
AB
arctan
yAB xAB
按上式计算坐标方位角时,计算出的是象限角,
yAB xAB
arctan 288.57 m 38.49 m
2622409
二、闭合导线的坐标计算
x 2
3
1082718
841018
1212702
1354911
4
900701
3352400
1 x1 500.00m
y1 500.00m
5
第6章小区域控制测量

三、教学基本要求
1、教学重点: 方位角的概念及推算、坐标正算与反算的概念、导线内业计算四等水准测量 2、教学难点: 导线内业计算
四、教材处理意见
以教材为主,参考其他同类教材,制作电子教案。
五、作业选题的建议
1、
2、习题:P62-63
六、第六章(三次授课)教案、讲稿附后
Lecture1
重庆交通大学 土木建筑学院 教案 周 次 第 10 周,第 1 次课
AB 345 180 130 360 35
六:象限角 以子午线的南端或北端为准量至直线的锐角。 七、用罗盘仪测磁方位角 1、罗盘仪的构造 磁针、刻度盘、读数设备 2、使用 1)安置罗盘仪于直线的一端,对中,整平。 2)松开磁针固定螺旋,使它自由转动。
(校核)
3)用望远镜瞄准直线的另一端点,约磁针停止时,读数磁针北端所指的读数(例镜读南端)
17=14-13=15-16 0.1
1 h 平=18= 2 (15+16 0.1 )
每页水准测量计算校核 高差
(3 8) (6 7) (15 16) 218
(偶数站)
(3 8) (6 7) (15 16) 218 0.1 (奇数站)
J b 测日,半测日较差 40
3、量边 钢尺一盘量距往返丈量 4、连测 独立地区(只有一个控制点)测起始方位角 非独立地区(已知两个以上的控制点)测连接角 。
Lecture3:
三、导线内业计算 按规定的表格计算,角度取至秒, x, y 的数位与边长的小数位相 ,步之有校核。 (一)闭合导线计算 1、编号,将已知数据填入表格中。
-360 +360
起 起•
土木工程测量 第七章 小区域控制测量讲解

程建设提供高程控制点。
城市和工程高程控制网
城市和工程高程控制网是以国家水准网为基础建 立的,其高程控制测量精度等级的划分以此为二、 三、四、五等。
各等均可采用水准测量法,四等以下可采用电磁 波测距和三角高程法,五等还可采用GPS拟合高程 测量法。
平面控制测量
----导线测量
导线测量
一、导线测量的布设形式 将测区内相邻控制点连成直线而构成的折线,称为 导
线。这些控制点,称为导线点。导线测量就是依次测 定各导线边的长度和各转折角值;根据起算数据,推 算各边的坐标方位角,从而求出各导线点的坐标。 用经纬仪测量转折角,用钢尺测定边长的导线,称为 经纬仪导线;若用光电测距仪测定导线边长,则称为 电磁波测距导线。 导线测量是建立小地区平面控制网常用的一种方法, 特别是地物分布较复杂的建筑区、视线障碍较多的隐 蔽区和带状地区,多采用导线测量的方法。根据测区 的不同情况和要求, 导线可布设成下列三种形式: 闭合导线、附合导线、支导线三种。
对于独立地区周围无高级控制点时,可假定某点坐标,用罗盘仪 测定起始边的磁方位角作为起算数据。
三、导线测量的内业计算
(一)几个基本公式 1、坐标方位角(grid bearing)的推算(回顾)
前 后 左 180 或: 前 后 右 180
注意:若计算出的方位角>360°,则减去360°; 若为负值,则加上360°。
平面控制测量
三角测量 最传统,它是将各控制点组成互相连接的一系列三角形,这些三 角形构成的控制网称为三角锁,是三角网的一种类型。所有三角 形的顶点称为三角点。测量三角形的一条边和全部三角形内角, 根据起算点的坐标与起算边的方位角,推算全部边长与方位角, 从而计算出各点的坐标,这项工作称为三角测量。 导线测量 导线测量—将各控制点组成连续的折线或多边形这种图形构成的 控制网称为导线网,也称导线,转折点(控制点)称为导线点。 测量相邻导线边之间的水平角与导线边长,根据起算点的平面坐 标和起算边方位角,计算各导线点坐标,这项工作称为导线测量。
小区域控制测量概述和原则
B1 118.62 12 122.05 23 120.33 34 116.64 4C 128.70
1.求角度闭合差 2.求改正数分为 3.改正后的角值
fβ=64″ -10 4*-11 -10 B 138 18 26 1 150 20 31 2 173 11 01 3 204 44 37 4 108 55 55 C 138 00 08
99.86
4C 125.80 -27.16
417.21
332.12
fx=0.08
fy=-0.18
0.20/606.34=1/3000
≤1/120000(首级) ≤1/80000(加密)
≤1/40000
≤1/80000 ≤1/45000 ≤1/20000
二级小三角
0.5
≤±10.0
≤1/20000
≤1/10000
三、图根测量 直接供地形测图使用的控制点,称为图根控制点,简称图 根点 测定图根点位置的工作,称为图根控制测量 图根控制测量的作用有二: 1、直接作测站点使用,进行碎部测量 2、做为临时增设测站点的依据
4.推算各导线的坐标方位角
AB 112 18 24 B1 70 36 50 12 40 57 21 23 34 08 22 34 58 52 59 4C 347 48 02 CD 305 49 02
5.求算坐标增量
B1 39.37
111.89
12 92.17
80.00
23 99.59
67.53
34 60.28
在城市或厂矿等地区,一般应在上述国家控制点的基础上, 根据测区的大小、城市规划和施工测量的要求,布设 不同等级
的城市平面控制网,以供地形测图和施工放样使用。 图根点的
小地区控制测量—小地区控制测量基础知识(园林工程测量)

一、控制测量
1.目的与作用 为测图或工程建设的测区建立统一的控制
网。 控制误差的积累。 作为进行各种细部测量的基准。
二、有关名词
小地区(小区域):不必考虑地球曲率对水 平角和水平距离影响的范围(15km2以 内)。
控制点:具有精确可靠平面坐标或高程的测 量基准点。
控制网:由控制点分布和测量方法决定所组 成的图形。
踏勘选点的原则:
1.相邻导线点之间通视良好; 2.点位选在适于安置仪器和便于保存 的地方; 3.点位选在视野范围广阔的地方; 4.点位分布均匀,便于控制整个测 区,进行细部测量; 5.尽量使点位的前后视距大致相等。
区。 2.附合导线
从一个已知坐标点出发,中间经过若干个 待测坐标点,最后符合到另一已知坐标点上的
(二)、导线布设形式
3.支导线 支导线的点数不宜超过2个,仅作补点使用。
附合导线
闭合导线
支导线
(三)、导线的外业
1.踏勘选点及建立标志; 2.测起始边的坐标方位角; 3.测水平角——连接角 (左角、右角); 4.测量各导线边的水平边长 。
(一)、定义及分类 1.导线的定义:将测区内相邻控制点(导线
点)连成直线而构成的折线图形。 2.适用范围:主要用于公路、铁路、水利、
园林工程等控制点的测量。
ห้องสมุดไป่ตู้
(二)、导线布设形式
1.闭合导线 从一个已知坐标点出发,中间经过若干个
待测坐标点,最后又闭合回到已知坐标点上的 导线布设形式。多用于面积较宽阔的独立地
控制测量:为建立控制网所进行的测量工
二、控制测量的分类
按内容分: 平面控制测量:测定各平面控制点的坐标X、
Y。 高程控制测量:测定各高程控制点的高程H。 按方法分:天文测量、常规测量(导线测量、
小区域控制测量

测量方法: 水准测量 三角高程测量 GPS高程测量
概念:测定点的高程(H)的工作;采用逐级控制、分级布设的原则,分为一、二、三、四个等级建立.
1
2
2
§6-2 导线测量
Part One
6.2.1 导线的布设形式
导线:将相邻控制点(导线点)连成直线而构成的折线图形
导线测量:依次测定导线边的水平距离和两相邻导线边的水平夹角,然后根据起算数据,推算各边的坐标方位角,最后求出导线点的平面坐标
6.4.2 观测值类型交会测量
一、测边交会
6.4.2 观测值类型交会测量
二、测边角后方交会
1
§6-5 坐标换带计算
Part One
6.5.1 高斯投影正算公式
6.5.2 高斯投影反算公式
6-6 三、四等水准测量
三、四等水准测量的技术要求
三、四等水准测量方法
三、四等水准测量的计算与检核
一、前方交会测量
6.4.2 图形类型交会测量
概念:分别在一个已知点(A)和待定点(P)上安置仪器,观测水平角α,γ和检查角θ,进而确定P点的坐标 计算方法: 计算出β=180-( α+γ ) 按照前方交会的计算方法步骤求出P点的平面坐标并进行检核 侧方交会测量
6.4.2 图形类型交会测量
概念:仅在待定点P上安置仪器,观测水平角α,β,γ和检查角θ,进而确定P点的平面坐标 计算公式为: 注意:在选定P时,应避免其落在危险圆上! 后方交会测量
图根控制网:直接供测图使用的控制网,其节点称为图根点,测定图根点的平面位置和高程的工作称为图根控制测量。
04
6.1.1 控制测量的基本概念
6.1.2 平面控制测量
国家级高程控制网和小区域高程控制网的布设(高程控制测量)

国家高程控制网的布设原则
从高到低、逐级控制
水准点分布应满足一定的密度 水准测量达到足够的精度
水准点分布密度要求
水准标 石类型
基岩水 准标石
基本水 准标石
普通水 准标石
一般地区
间距/km
经济发达 地区
荒漠地区布设具体要求Fra bibliotek只设于一等水准路线上,在大城市和断裂
500
带附近应该增设,基岩较深地区可适当放
高程控制测量
目录
CONTENTS
01 国家高程控制网的布设原则
02 水准路线的设计和选点
03 我国国家水准网的布设概况
04
小区域高程控制网
01 国家高程控制网的布设原则
国家高程控制网的布设原则
国家高程控制网布设的目的和任务有两项:
建立统一的高程控制网,为地形图测图和各项建 设提供高程基础;
为地壳垂直运动、海平面倾斜及变化,大地水准 面的形状等地球科学研究提供精确的高程数据。 我国具有地域辽阔、领土广大、地形复杂等特点, 所以应按照以下原则进行高程控制网的布设。
宽,每个省级行政单位至少两座
设于一、二等水准路线上及交叉处,大、
40
20~30
60
中城市两侧及县城附近(尽量设置于坚固
岩层上)
设于个等水准路线上,以及山区水准路线
4~8
2~4
10
高程变换点附件,长度超过300m隧道,跨
河水准测量的两岸标尺附近
数准测量精度要求
水准测量等级
一等
二等
三等
四等
MΔ的限值
≦±0.45mm ≦±1.0mm ≦±3.0mm ≦±5.0mm
水准路线应该避开土质松软、 磁场较强的地段,尽量避开 通过河流、湖泊和沼泽的障 碍物
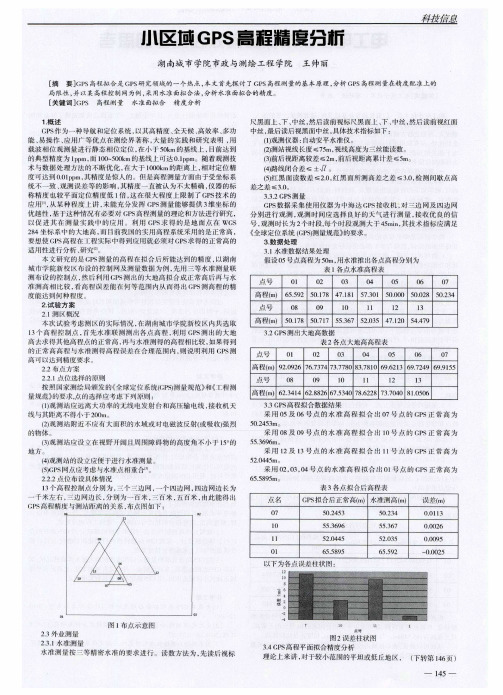
小区域GPS高程精度分析
尺黑面上 、 下、 中丝, 然后 读前视标 尺黑面上 、 下、 叶 1 丝, 然后读前视红面 中丝 , 最后读后视黑面 中丝 , 具体技术指标如下 :
( 1 1 观测仪 器: 自动安平水准仪 。
技信 息
湖 南城 市 学院 市政 与测绘 工程 学 院
[ 摘
王 帅丽
要] GP s高程拟 舍是GP S 研究领域的一 个热点, 本文首先探讨 了GP S高程 测量的基本原理 , 分析 GP S高程 测量在精 度配准上的
局限性 . 并 以某高程控制 网为例 , 采 用水准面拟合 法, 分析 水准面拟合 的精度 。 [ 关键词 ] GP S 高程测量 水准面拟合 精度分析
f 2 ) N 站视线 长度  ̄ <7 5 m, 视线高度为三丝能读数。 ( 3 ) 前后 视距 离较 差≤2 m, 前后视距离 累汁差 ≤5 m。
( 4 ) 路线 闭合差≤ ±√ 。 f 5 ) 红黑 面读数差 ≤2 . 0 , 红 黑面所测 高羞之差 ≤3 . 0 , 检测间歇点 高
点 号 0 8 0 9 1 0 l 1 l 2 l 3
鲢规范》 的要求, 点 的选择 应考虑下 列原则 : ( 1 ) 观测站应 远离大功 率的无线 电发射台和高压 输电线 , 接收机天 线与其距离 不得小 于2 0 0 m。 ( 2 ) 观测站 附近不应 仃大面积 的水域 或对 电磁波 反射( 或 吸收) 强烈 的物体 、 ( 3 ) 观测站应设 立存 视野开阔且周 同障碍物 的高度角不 小于 l 5 。 的
高I 1 _ 以达 到 精 度 要 求 。 2 _ 2印 点 方 案 2 . 2 . 1 点 位 选 择 的原 则 按照 闰家测绘 局颁发的《 全球定位 系统( G P s ) 测量规 范》 和《 ] 程测
19 小区域高程控制测量
(3)视距差累积值∑di=前站的视距差累积值 视距差累积值∑ ∑di-1 +本站的前后视距差di 本站的前后视距差d ∑di要求: Ⅲ等≤±6m, Ⅳ等≤±10m 要求: Ⅲ等 Ⅳ等 (4)黑红面读数差=黑面中丝+K-红面中丝. 黑红面读数差=黑面中丝+K 红面中丝. +K(K= 4787mm或4687mm) 4787mm或4687mm) 要求: Ⅲ等 要求: Ⅲ等≤±2mm, Ⅳ等≤±3mm Ⅳ等 (5)黑面高差h黑=黑面后视中丝-黑面前视中丝 黑面高差h 黑面后视中丝-
上丝读数,下丝读数, 上丝读数,下丝读数,中丝读数 上丝读数,下丝读数, 上丝读数,下丝读数,中丝读数 中丝读数 中丝读数
后视尺
前视尺
2,计算与记录格式(见表) 计算与记录格式(见表)
(1)视距=100×|上丝-下丝| 视距=100× 上丝-下丝|
(2)前后视距差di =后视距-前视距 前后视距差d 后视距di要求: 要求: Ⅲ等 Ⅲ等≤±3m, Ⅳ等≤±5m Ⅳ等
(6)红面高差h红=红面后视中丝-红面前视中丝 红面高差h 红面后视中丝(7)黑红面高差之差=h黑-(h红±0.100m) 黑红面高差之差=h 0.100m) 要求: 要求: Ⅲ等 Ⅲ等≤±3mm, Ⅳ等≤±5mm Ⅳ等
(8)高差中数= [h黑+(h红±0.100m)]/2 高差中数= 0.100m) (9)水准路线总长L=∑后视距+∑前视距 水准路线总长L=∑后视距+∑ L=∑后视距+∑前视距
四等水准测量录像
1,羽毛 2,威尼斯的泪
图 表 : 四 等 水 准 测 量 记 录 表
二,三角高程测量 (trigonometric leveling)
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
§6.3 小区域高程控制测量
一、三、四等水准测量(leveling surveying)
(一)适用:平坦地区的高程控制测量。
(二)精度要求和技术要求。
(见表)
(三)作业方法
1、每站观测程序(见图)
(1)顺序——“后前前后”(黑黑红红);一般一对尺子交替使用。
(2)读数——黑面按“三丝法”(上、中、下丝)读数,红面仅读中丝。
2、计算与记录格式(见表)
(1)视距=100×|上丝-下丝|
(2)前后视距差d
i
=后视距-前视距
(3)视距差累积值∑d
i =前站的视距差累积值∑d
i-1
+本站的前后视距差d
i
(4)黑红面读数差=黑面读数+K-红面读数。
(K= 4787mm或4687mm)(5)黑面高差h
黑
=黑面后视中丝-黑面前视中丝
(6)红面高差h
红
=红面后视中丝-红面前视中丝
(7)黑红面高差之差=h
黑-(h
红
±0.100m)
(8)高差中数(平均高差)= [h
黑+(h
红
±0.100m)]/2
(9)水准路线总长L=∑后视距+∑前视距
二、三角高程测量(trigonometric leveling)
(一)适用于:地形起伏大的地区进行高程控制。
实践证明,电磁波三角高程的精度可以达到四等水准的要求。
(二)原理
有:l S i H H l Dtg i H H A B A B -++=-++=ααsin 或
=-=A B AB H H h l Dtg i -+α=l S i -+αsin
注意:当两点距离较大(大于300m )时(见图)
1、加球气差改正数:
R D f 2
43.0= ( 说明:球差正,气差负, R ——6371km 。
) 即: f l Dtg i h AB +-+=α
2、可采用对向观测后取平均的方法,抵消球气差的影响。
(三)观测与计算
测竖直角、量仪器高、量觇标高(棱镜高)。
其技术要求,见各种规范。