计算机组成原理实验完整版
计算机组成原理实验

计算机组成原理实验一、实验目的本实验旨在通过实际操作,加深对计算机组成原理的理解,掌握计算机硬件的基本原理和工作方式。
二、实验设备和材料1. 计算机主机:型号为XXX,配置了XXX处理器、XXX内存、XXX硬盘等。
2. 显示器:型号为XXX,分辨率为XXX。
3. 键盘和鼠标:标准配置。
4. 实验板:包括CPU、内存、存储器、输入输出接口等模块。
5. 逻辑分析仪:用于分析和调试电路信号。
6. 示波器:用于观测电路信号的波形。
三、实验内容1. 实验一:CPU的工作原理a. 将实验板上的CPU模块插入计算机主机的CPU插槽中。
b. 连接逻辑分析仪和示波器,用于观测和分析CPU的工作信号和波形。
c. 打开计算机主机,启动操作系统。
d. 运行一段简单的程序,观察CPU的工作状态和指令执行过程。
e. 通过逻辑分析仪和示波器的数据分析,了解CPU的时钟信号、数据总线、地址总线等工作原理。
2. 实验二:内存的存储和读写a. 将实验板上的内存模块插入计算机主机的内存插槽中。
b. 打开计算机主机,启动操作系统。
c. 编写一个简单的程序,将数据存储到内存中。
d. 通过逻辑分析仪和示波器的数据分析,观察内存的写入和读取过程,了解内存的存储原理和读写速度。
3. 实验三:存储器的工作原理a. 将实验板上的存储器模块插入计算机主机的存储器插槽中。
b. 打开计算机主机,启动操作系统。
c. 编写一个简单的程序,读取存储器中的数据。
d. 通过逻辑分析仪和示波器的数据分析,观察存储器的读取过程,了解存储器的工作原理和数据传输速度。
4. 实验四:输入输出接口的工作原理a. 将实验板上的输入输出接口模块插入计算机主机的扩展插槽中。
b. 打开计算机主机,启动操作系统。
c. 编写一个简单的程序,通过输入输出接口实现数据的输入和输出。
d. 通过逻辑分析仪和示波器的数据分析,观察输入输出接口的工作过程,了解数据的传输和控制原理。
四、实验结果分析1. 实验一:通过观察CPU的工作状态和指令执行过程,可以验证CPU的时钟信号、数据总线、地址总线等工作原理是否正确。
计算机组成原理实验(接线、实验步骤)
计算机组成原理实验(接线、实验步骤)实验⼀运算器[实验⽬的]1.掌握算术逻辑运算加、减、乘、与的⼯作原理;2.熟悉简单运算器的数据传送通路;3.验证实验台运算器的8位加、减、与、直通功能;4.验证实验台4位乘4位功能。
[接线]功能开关:DB=0 DZ=0 DP=1 IR/DBUS=DBUS接线:LRW:GND(接地)IAR-BUS# 、M1、M2、RS-BUS#:接+5V控制开关:K0:SW-BUS# K1:ALU-BUSK2:S0 K3:S1 K4:S2K5:LDDR1 K6:LDDR2[实验步骤]⼀、(81)H与(82)H运算1.K0=0:SW开关与数据总线接通K1=0:ALU输出与数据总线断开2.开电源,按CLR#复位3.置数(81)H:在SW7—SW0输⼊10000001→LDDR2=1,LDDR1=0→按QD:数据送DR2置数(82)H:在SW7—SW0输⼊10000010→LDDR2=0,LDDR1=1→按QD:数据送DR1 4.K0=1:SW开关与数据总线断开K1=1:ALU输出与数据总线接通5. S2S1S0=010:运算器做加法(观察结果在显⽰灯的显⽰与进位结果C的显⽰)6.改变S2S1S0的值,对同⼀组数做不同的运算,观察显⽰灯的结果。
⼆、乘法、减法、直通等运算1.K0K1=002.按CLR#复位3.分别给DR1和DR2置数4.K0K1=115. S2S1S0取不同的值,执⾏不同的运算[思考]M1、M2控制信号的作⽤是什么?运算器运算类型选择表选择操作S2 S1 S00 0 0 A&B0 0 1 A&A(直通)0 1 0 A+B0 1 1 A-B1 0 0 A(低位)ΧB(低位)完成以下表格ALU-BUS SW-BUS# 存储器内容S2S1S0 DBUS C输⼊时:计算时:DR1:01100011DR2:10110100(与)DR1:10110100DR2:01100011(直通)DR1:01100011DR2:01100011(加)DR1:01001100DR2:10110011(减)DR1:11111111DR2:11111111(乘)实验⼆双端⼝存储器[实验⽬的]1.了解双端⼝存储器的读写;2.了解双端⼝存储器的读写并⾏读写及产⽣冲突的情况。
计算机组成原理实验报告
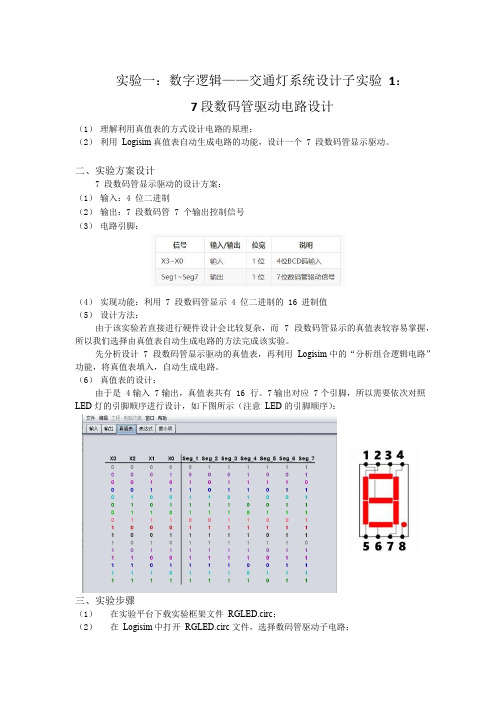
实验一:数字逻辑——交通灯系统设计子实验1:7 段数码管驱动电路设计(1)理解利用真值表的方式设计电路的原理;(2)利用Logisim 真值表自动生成电路的功能,设计一个 7 段数码管显示驱动。
二、实验方案设计7 段数码管显示驱动的设计方案:(1)输入:4 位二进制(2)输出:7 段数码管 7 个输出控制信号(3)电路引脚:(4)实现功能:利用 7 段数码管显示 4 位二进制的 16 进制值(5)设计方法:由于该实验若直接进行硬件设计会比较复杂,而7 段数码管显示的真值表较容易掌握,所以我们选择由真值表自动生成电路的方法完成该实验。
先分析设计 7 段数码管显示驱动的真值表,再利用Logisim 中的“分析组合逻辑电路”功能,将真值表填入,自动生成电路。
(6)真值表的设计:由于是 4输入 7输出,真值表共有 16 行。
7输出对应 7个引脚,所以需要依次对照LED 灯的引脚顺序进行设计,如下图所示(注意LED 的引脚顺序):三、实验步骤(1)在实验平台下载实验框架文件RGLED.circ;(2)在Logisim 中打开RGLED.circ 文件,选择数码管驱动子电路;(3)点击“工程”中的“分析组合逻辑电路”功能,先构建4输入和7输出,再在“真值表”中,将已设计好的真值表的所有数值仔细对照着填入表格中,确认无误后点击“生成电路”,自动生成的电路如下图所示:(4)将子电路封装为如下形式:(5)进行电路测试:·自动测试在数码管驱动测试子电路中进行测试;·平台评测自动测试结果满足实验要求后,再利用记事本打开RGLED.circ 文件,将所有文字信息复制粘贴到Educoder 平台代码区域,点击评测按钮进行测试。
四、实验结果测试与分析(1)自动测试的部分结果如下:(2)平台测试结果如下:综上,本实验测试结果为通过,无故障显示。
本实验的关键点在于:在设计时需要格外注重LED 灯的引脚顺序,保证0-9 数字显示的正确性,设计出正确的真值表。
计算机组成原理实验2.1总线与寄存器
1) 令#R0_BUS= #DR_BUS= #SFT_BUS=1,#SW_BUS=0;启动仿 真,通过拨码开关送入总线BUS任意八位二进制数,赋值 74LS194的输入端D0D1D2D3。按照后页的逻辑功能表置位 74LS194的MR、S1、S0 、SL、SR端,观察并记录CLK端上升 沿和下降沿跳变时刻输出端Q0Q1Q2Q3的状态。
2) 令#SW_BUS=0,三态门74LS244导通,记录BUS总线上的数 据,与总线BIN相比较:
BUS_7 BUS_6 BUS_5 BUS_4 BUS_3 BUS_2 BUS_1 BUS_0 BUS总线
单位D触发器:74LS74 四位D触发器:74LS175
D触发器逻辑功能 表
【2】D触发器实验(一Fra bibliotek总线与寄存器 实验 电路图
三态门74LS244
拨码开关与总线缓冲器(注意观察74LS244左右电平)
【1】总线实验
实验步骤:
1) #SW_BUS = #R0_BUS= #DR_BUS= #SFT_BUS=1;启动仿真, 手动拨码开关在总线DIN上置位数据0x55。比较拨码开关 所在的总线DIN与总线BUS上的数据。
实验步骤:
1) 令#R0_BUS= #DR_BUS= #SFT_BUS=1, #SW_BUS=0,启动 仿真,手动拨码开关输入数据到BUS总线,改变74LS74的 D端(即BUS总线的BUS_0)状态,按照后页逻辑功能表置 位74LS74的#Sd端、#Rd端,观察并记录CLK端上升沿 、 下降沿跳变时刻的Q端和#Q端状态。
的0xAA数据存入DR。观察寄存器74LS273的输出端。 6) 再令#R0_BUS=1;观察寄存器74LS374的输出端,请比较器
《计算机组成原理》实验报告一
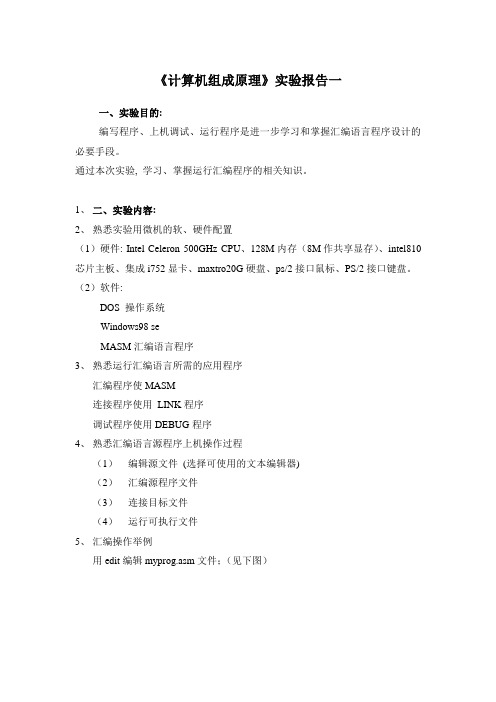
《计算机组成原理》实验报告一一、实验目的:编写程序、上机调试、运行程序是进一步学习和掌握汇编语言程序设计的必要手段。
通过本次实验, 学习、掌握运行汇编程序的相关知识。
1、二、实验内容:2、熟悉实验用微机的软、硬件配置(1)硬件: Intel Celeron 500GHz CPU、128M内存(8M作共享显存)、intel810芯片主板、集成i752显卡、maxtro20G硬盘、ps/2接口鼠标、PS/2接口键盘。
(2)软件:DOS 操作系统Windows98 seMASM汇编语言程序3、熟悉运行汇编语言所需的应用程序汇编程序使MASM连接程序使用LINK程序调试程序使用DEBUG程序4、熟悉汇编语言源程序上机操作过程(1)编辑源文件(选择可使用的文本编辑器)(2)汇编源程序文件(3)连接目标文件(4)运行可执行文件5、汇编操作举例用edit编辑myprog.asm文件;(见下图)用MASM.exe编译myprog.asm生成myprog.obj文件;C:\masm\bin> masm.exe由图中可以看出:0 个警告错误0个严格错误汇编通过, 生成mygrog.obj目标文件(如果有严格错误, 汇编不能通过, 必须返回编辑状态更改程序。
)用link.exe命令链接myhprog.obj生成myprog.exe文件!C:\masm\bin> link.exeC:\masm\bin> myprog.exe运行程序结果为:屏幕显示“Hi! This is a dollar sign terminated string.”三、实验总结:1.可以在DOS或Windows状态编辑汇编源程序2.可以使用EDIT 或记事本编辑汇编源程序, 源程序必须以.asm为扩展名。
在记事本中保存文件时, 可以加双引号“myprog.asm”,文件名就不会出现myprog.asm.txt的错误3.熟悉相关的DOS 命令cd 进入子目录mkdir 建立子目录xcopy *.* /s 拷贝当前目录下所有文件及子目录format a: 格式化A盘4.在Windows 系统下运行汇编程序, 有时会有问题, 建议大家熟悉DOS命令,DOS编辑工具, 在DOS状态下运行汇编程序。
计算机组成原理实验1_脱机运算器
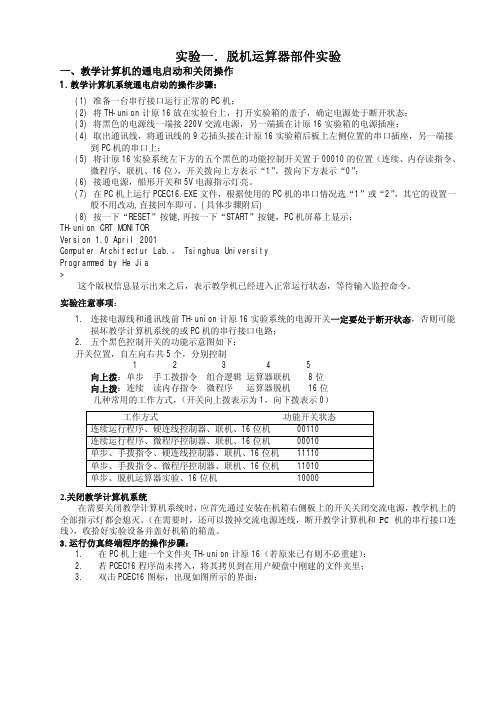
实验一.脱机运算器部件实验一、教学计算机的通电启动和关闭操作1.教学计算机系统通电启动的操作步骤:(1) 准备一台串行接口运行正常的PC机;(2) 将TH-union计原16放在实验台上,打开实验箱的盖子,确定电源处于断开状态;(3) 将黑色的电源线一端接220V交流电源,另一端插在计原16实验箱的电源插座;(4) 取出通讯线,将通讯线的9芯插头接在计原16实验箱后板上左侧位置的串口插座,另一端接到PC机的串口上;(5) 将计原16实验系统左下方的五个黑色的功能控制开关置于00010的位置(连续、内存读指令、微程序、联机、16位),开关拨向上方表示“1”,拨向下方表示“0”;(6) 接通电源,船形开关和5V电源指示灯亮。
(7) 在PC机上运行PCEC16.EXE文件,根据使用的PC机的串口情况选“1”或“2”,其它的设置一般不用改动,直接回车即可。
(具体步骤附后)(8) 按一下“RESET”按键,再按一下“START”按键,PC机屏幕上显示:TH-union CRT MONITORVersion 1.0 April 2001Computer Architectur Lab., Tsinghua UniversityProgrammed by He Jia>这个版权信息显示出来之后,表示教学机已经进入正常运行状态,等待输入监控命令。
实验注意事项:1.连接电源线和通讯线前TH-union计原16实验系统的电源开关一定要处于断开状态,否则可能损坏教学计算机系统的或PC机的串行接口电路;2.五个黑色控制开关的功能示意图如下:开关位置,自左向右共5个,分别控制1 2 3 4 5向上拨:单步手工拨指令组合逻辑运算器联机 8位向上拨:连续读内存指令微程序运算器脱机 16位几种常用的工作方式,(开关向上拨表示为1,向下拨表示0)工作方式功能开关状态连续运行程序、硬连线控制器、联机、16位机 00110连续运行程序、微程序控制器、联机、16位机 00010单步、手拨指令、硬连线控制器、联机、16位机 11110单步、手拨指令、微程序控制器、联机、16位机 11010单步、脱机运算器实验、16位机 100002.关闭教学计算机系统在需要关闭教学计算机系统时,应首先通过安装在机箱右侧板上的开关关闭交流电源,教学机上的全部指示灯都会熄灭。
计组实验报告(共10篇)

计组实验报告(共10篇)计组实验报告计算机组成原理实验报告一一、算术逻辑运算器1. 实验目的与要求:目的:①掌握算术逻辑运算器单元ALU(74LS181)的工作原理。
②掌握简单运算器的数据传输通道。
③验算由74LS181等组合逻辑电路组成的运输功能发生器运输功能。
④能够按给定数据,完成实验指定的算术/逻辑运算。
要求:完成实验接线和所有练习题操作。
实验前,要求做好实验预习,掌握运算器的数据传送通道和ALU 的特性,并熟悉本实验中所用的模拟开关的作用和使用方法。
实验过程中,要认真进行实验操作,仔细思考实验有关的内容,把自己想得不太明白的问题通过实验去理解清楚,争取得到最好的实验结果,达到预期的实验教学目的。
实验完成后,要求每个学生写出实验报告。
2. 实验方案:1.两片74LS181(每片4位)以并/串联形式构成字长为8为的运算器。
2.8为运算器的输出经过一个输入双向三态门(74LS245)与数据总线相连,运算器的两个数据输入端分别与两个8位寄存器(74LS273)DR1和DR2的输出端相连,DR1和DR2寄存器是用于保存参加运算的数据和运算的结果。
寄存器的输入端于数据总线相连。
3.8位数据D7~D0(在“INPUT DEVICE”中)用来产生参与运算的数据,并经过一个输出三态门(74LS245)与数据总线相连。
数据显示灯(BUS UNIT)已与数据总线相连,用来显示数据总线上所内容。
4.S3、S2、S1、S0是运算选择控制端,由它们决定运算器执行哪一种运算(16种算术运算或16种逻辑运算)。
5.M是算术/逻辑运算选择,M=0时,执行算术运算,M=1时,执行逻辑运算。
6.Cn是算术运算的进位控制端,Cn=0(低电平),表示有进位,运算时相当于在最低位上加进位1,Cn=1(高电平),表示无进位。
逻辑运算与进位无关。
7.ALU-B是输出三态门的控制端,控制运算器的运算结果是否送到数据总线BUS上。
低电平有效。
计算机组成原理实验报告完整版

计算机组成原理实HEN system office room [HEN 16H-HENS2AHENS8Q8-HENH1688]南通大学计算机科学与技术学院上机实验报告姓名:邓啥班级:软件工程142一、目的及要求1.熟悉静态随机存储器RAM和只读存储器ROM的工作特性和使用方法;2.熟悉半导体存储器存储和读出数据的过程;3.了解使用半导体存储器电路时的定时要求。
二、环境(软、硬件平台)硬件:计算机一台软件:Quartus II及以上版本三、内容及步骤(包括程序流程及说明)1.利用Quartus II器件库提供的参数化存储单元lpm.rom设计一个山128><8位的ROM (地址空间:OOH'7FH)构成的只读存储器系统。
(1)设计实验电路图,在Quartus II的编辑环境下,进行原理图的输入和编辑工作,要求编译通过,无错误。
(2)利用・Mf文件,对ROM的存储单元00H'05H进行初始化。
(3)给定ROM存储区的地址:OOH〜O5H,读ROM存储单元。
要求通过分析仿真波形,检查数据的正确性。
记录仿真波形、分析方法、分析过程和分析结果。
•首先利用器件库提供的存储单元lpm_rom器件设计一个128X8位的ROM只读存储器,注意这里要关联m辻文件;•设计的电路图如下:给入的八位地址的最高位作为器件脉冲端的控制信号,其余七位作为ROM的地址输入。
利用・m辻文件,对ROM的存储单元OOH〜O5H进行初始化如上面的截图所示,每次在重新写入数据时都要更新重新关联文件;然后设汁出仿真波形:2.利用Quartus H器件库提供的参数化存储单元lpm_ram_dq,设计“一个山128X8位的RAM (地址空间:80H、FFH)构成的随机存储器系统。
(1)设计实验电路图,在Quartus II的编辑环境下,进行原理图的输入和编辑工作,要求编译通过,无错误。
(2)给RAM的存储单元80H、85H写入数据。
计算机组成原理实验

IN ADD OUT JMP – 通过串口连接实验系统和PC机 – 运行CMPP联机软件,装载程序文件 – 调用“复杂模型机”通路图,注意观察单步 微指令和单步机器指令的运行过程
实验一 系统认识实验
实验报告要点:
– 数字计算机结构原理图
– 本系统的四条指令
IN ADD OUT JMP – 实验思考题 – 实验小结
– 74LS245三态门,控制输入输出操作 ALU-B置低电平:输出运算结果 SW-B置低电平:输入数据进入总线 – 74LS273实现两个操作数的数据锁存 LDDR1/LDDR2置高电平 脉冲触发-T4 – 总线灯(LED)显示总线上的数据
245芯片 181芯片 273芯片 181芯片 273芯片 总线灯
实验三 控制器实验
微命令(微信号)
– 直接作用于控制电路的控制命令
微操作
– CPU在执行指令中,由微命令控制实现的最
基本操作
送指令地址、取指、读指令、译码、送操作数地 址、取操作数、运算、写回结果等 微操作是指令执行部件接受微命令后进行的操作
微周期
– 读取一条微指令并完成相应微操作所用时间,
C字段
9 0 0 0 0 1 1 1 8 0 0 1 1 0 0 1 7 0 1 0 1 0 1 0 P(1) P(2) P(3) P(4) AR LDPC 选择
实验三 控制器实验
A字段
15 0 0 0 0 1 1 1 14 0 0 1 1 0 0 1 13 0 1 0 1 0 1 0 LDRi LDDR1 LDDR2 LDIR LOAD LDAR 选择
实验二 运算器实验
集成逻辑芯片74LS181 – 4位ALU单元 逻辑功能表
计算机组成原理实验报告精品9篇
计算机组成原理实验报告课程名称计算机组成原理实验学院计算机专业班级学号学生姓名指导教师20年月日实验一:基础汇编语言程序设计实验1实验目的●学习和了解TEC-XP+教学实验监控命令的用法;●学习和了解TEC-XP+教学实验系统的指令系统;●学习简单的TEC-XP+教学实验系统汇编程序设计。
2实验设备及器材●工作良好的PC机;●TEC-XP+教学实验系统和仿真终端软件PCEC。
3实验说明和原理实验原理在于汇编语言能够直接控制底层硬件的状态,通过简单的汇编指令查看、显示、修改寄存器、存储器等硬件内容。
实验箱正如一集成的开发板,而我们正是通过基础的汇编语言对开发板进行使用和学习,过程中我们不仅需要运用汇编语言的知识,还需要结合数字逻辑中所学的关于存储器、触发器等基本器件的原理,通过串口通讯,实现程序的烧录,实验箱与PC端的通讯。
4实验内容1)学习联机使用TEC-XP+教学实验系统和仿真终端软件PCEC;2)学习使用WINDOWS界面的串口通讯软件;3)使用监控程序的R命令显示/修改寄存器内容、D命令显示存储内容、E命令修改存储内容;4)使用A命令写一小段汇编程序,U命令反汇编输入的程序,用G命令连续运行该程序,用T、P命令单步运行并观察程序单步执行情况。
5实验步骤1)准备一台串口工作良好的PC机器;2)将TEC-XP+放在实验台上,打开实验箱的盖子,确定电源处于断开状态;3)将黑色的电源线一段接220V交流电源,另一端插在TEC-XP+实验箱的电源插座里;4)取出通讯线,将通讯线的9芯插头接在TEC-XP+实验箱上的串口"COM1"或"COM2"上,另一端接到PC机的串口上;5)将TEC-XP+实验系统左下方的六个黑色的控制机器运行状态的开关置于正确的位置,再找个实验中开关应置为001100(连续、内存读指令、组合逻辑、联机、16位、MACH),6)控制开关的功能在开关上、下方有标识;开关拨向上方表示"1",拨向下方表示"0","X"表示任意,其他实验相同;7)打开电源,船型开关盒5V电源指示灯亮;8)在PC机上运行PCEC16.EXE文件,根据连接的PC机的串口设置所用PC机的串口为"1"或"2",其他的设置一般不用改动,直接回车即可; (8)按一下"RESET"按键,再按一下"START"按键,主机上显示:6实验截图及思考题【例3】计算1到10的累加和。
(完整word版)计算机组成原理实验1~4
实验一寄存器实验一、实验目的1、了解CPTH模型机中寄存器的结构、工作原理及其控制方法.2、熟悉CPTH实验仪的基本构造及操作方法。
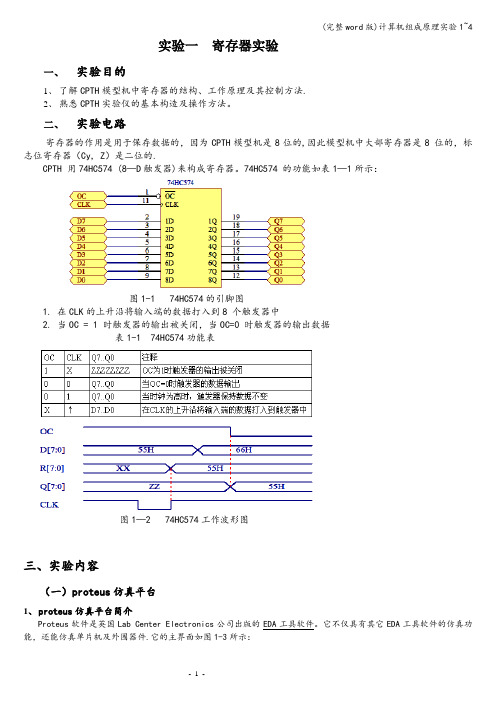
二、实验电路寄存器的作用是用于保存数据的,因为CPTH模型机是8位的,因此模型机中大部寄存器是8 位的,标志位寄存器(Cy, Z)是二位的.CPTH 用74HC574 (8—D触发器)来构成寄存器。
74HC574 的功能如表1—1所示:图1-1 74HC574的引脚图1. 在CLK的上升沿将输入端的数据打入到8 个触发器中2. 当OC = 1 时触发器的输出被关闭,当OC=0 时触发器的输出数据表1-1 74HC574功能表图1—2 74HC574工作波形图三、实验内容(一)proteus仿真平台1、proteus仿真平台简介Proteus软件是英国Lab Center Electronics公司出版的EDA工具软件。
它不仅具有其它EDA工具软件的仿真功能,还能仿真单片机及外围器件.它的主界面如图1-3所示:图1—3 proteus仿真平台主界面2、在proteus平台上运行电路:寄存器_1.DSN。
拨动开关,观察灯的亮灭,回答思考题1。
思考题1:先使OC=1,拨D0~D7=00110011,按下CK提供CLK上升沿;再拨D0~D7=01000100,OC=0,此时Q0~Q7为多少?3、CPTH模型机上,寄存器A的电路组成如图1-4所示。
在proteus平台上运行电路:寄存器_2.DSN,回答思考题2。
图1-4 寄存器A原理图思考题2:数据从D端传送到Q端,相应的控制端如何设置?3、CPTH模型机上,寄存器组R0~R3的电路组成如图1-5所示。
在proteus平台上运行电路:寄存器_3。
DSN,回答思考题3。
图1—5 寄存器组R0~R3 原理图74LS139是2—4线译码器,由A、B两个输入端选择控制4个输出端Y0~Y3,使能端E低电平有效,允许译码输出。
74HC32是或门,两个输入端同时为低电平,输出为低电平.具体的控制方式见表1-2。
张晴《计算机组成原理》计算机组成原理实验

理解总线的概念,掌握总线传输特性
二、实验设备
TDN-CM++实验仪一套 三、实验内容
用实验台搭建一个总线电路,实现以下四步数据流的传输
1、 INPUT →R0 3、RO →RAM
2、INPUT →AR 4、RAM →LED
四、实验步骤 1、连接实验线路 2、按P30所示的流程进行操作 3、查看RAM中数据与LED上数据是否一致
三、实验内容 用实验台提供的6116芯片搭建一个可读写的RAM电路,
完成读写操作
四、实验步骤 1、连接实验线路 2、根据实验原理图及读写操作步骤,完成向25H~2AH单
元写入75H~7AH的数据,然后读出 3、记录实验结果
存 储 器 实 验 原 理 图
实验线路
注:
A7…A0 => AD7…AD0
4、STA R0
R0 →RAM
5、JMP ADDR
RAM →PC
四、实验步骤 1、连接实验线路 2、根据24位微指令格式及指令功能编写相应微程序,按P25所写步骤
将微程序写入ROM(或者) 3、输入微程序,共有两种方法: (1)通过开关手动输入
①将编程开关置为PROM,STEP置为STEP,STOP置为RUN ②在SWITCH UNIT用开关置微地址MA5-MA0 ③在MK24-MK1开关上置24位微码 ④启动时序电路,按START按钮 ⑤重复③- ④步,完成输入所有微码
总线传输原理图
实 验 线 路
总线基本实验操作步骤
初始化:LDAR和LDR0信号置0,其他信号均置1 W/R(RAM)为0表示存储器写,为1表示存储器读 所有三态门(SW-B,CE,R0-B,LED-B)信号均为0有效 脉冲信号为LDAR和LDR0上升沿,W/R(LED)为下降沿
计算机组成原理实验
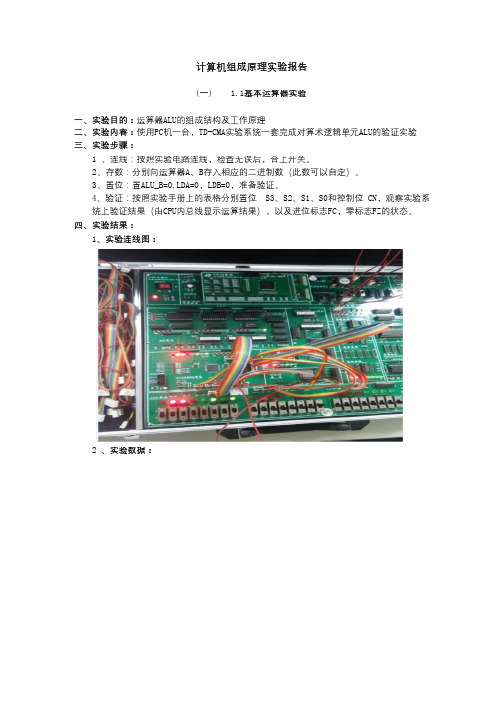
计算机组成原理实验报告(一) 1.1基本运算器实验一、实验目的:运算器ALU的组成结构及工作原理二、实验内容:使用PC机一台,TD-CMA实验系统一套完成对算术逻辑单元ALU的验证实验三、实验步骤:1 、连线:按照实验电路连线,检查无误后,合上开关。
2、存数:分别向运算器A、B存入相应的二进制数(此数可以自定)。
3、置位:置ALU_B=0,LDA=0,LDB=0,准备验证。
4、验证:按照实验手册上的表格分别置位 S3、S2、S1、S0和控制位 CN,观察实验系统上验证结果(由CPU内总线显示运算结果),以及进位标志FC,零标志FZ的状态。
四、实验结果:1、实验连线图:2、实验数据:运算类型逻辑运算A B S3 S2 S1 S0 CNXXXXX结果65656565656565A7A7A7A7A7A7A71111111111F=(65)FC=(0)FZ=(0)F=(A7)FC=(0)FZ=(0)F=(25)FC=(0)FZ=(0)F=(E7)FC=(0)FZ=(0)F=(65)FC=(0)FZ=(0)F=(32)FC=(0)FZ=(0)F=(32)FC=(0)FZ=(0)移位运算165 65 A7A71111111F=(CA)FC=(0)FZ=(0)F=(CA)FC=(0)FZ=(0)65 65 65 A7A7A71111111XXXF=(0C)FC=(1)FZ=(0)F=(66)FC=(1)FZ=(0)F=(64)FC=(0)FZ=(0)算术运算图 1-1五:实验分析:原理分析:由于计算机算术逻辑单元ALU内嵌了相应的逻辑,移位,算是运算功能部件,并且控制型号位S3、S2、S1、S0和控制位CN共同决定ALU实现什么样的运算功能,任何时候,多路选择开关只选择三部件的结果作为ALU的输出,当中,若有影响进位的运算,还将置进位标志FC,爱运算结果输出前,我们需要置零标志位。
错误分析:在按照实验电路连线的时候,由于某些实线在输入输出没有相互对应,导致最终的CPU内总线显示运算结果与进位标志有些许的错误,经检查纠正过后,最终验证结果如上图1-1。
计算机组成原理实践环节第4部分计算机组成原理实验
ALU为8位逻辑运算部件,它的输出为F0~F8,
(其中F8为进位输出)。它可有如下8种功能,具体
由开关K13、K14、K16选择: F=A+B 允许有进位输入(K9)和进位输出(L9)。 F=A+l 允许有进位输入(K9)和进位输出(L9)。 F=A∧B, F=A∨B, F=B, F=A, F=全1, F=全零。
三 存储部件实验 存储器部件实验请大家自己参考实验讲义。
使数码管的小数点全亮。
(4).实验操作: a.使K8~K16处于非有效状态。 b.置K0~K7为10010110,使74244导通
至IDB,并使74373接数。 c.置KO~K7为11110000,使74244导通,
并使74374接数。 d.关闭74244。
e.使74373输出至IDB,并写入M(6116)中。 f.使74374输出至IDB,并使74373接数。 g.读出M至IDB,并使74374接数 。 h.使74373输出至IDB,并使74377接数, L0~L7为11110000使74374输出至IDB,并使 74377接数,L0~L7为10010110。
(3). 74377、74374等D触发器,需定义它 们的NODE为REG类型(ISTYPE‘REG')。
(4). 对D触发器,需定义D端输人和时钟输 入的表达式,例对74374可如下定义:
[U374Q0...U374Q7]=[IDB0...IDB7]; [U374Q0...U374Q7].CLK=U374CK;
据。
74244为8位三态门,OE=0时,把K7~K0的数 据输入到IDB上。
74377为8位D触发器,CK为上跳有效时钟,EN 为允许输入(恒接为0),它的输出接L8~Ll5。
计算机组成原理实验报告
实验1 通用寄存器实验一、实验目的1.熟悉通用寄存器的数据通路。
2.了解通用寄存器的构成和运用。
二、实验要求掌握通用寄存器R3~R0的读写操作。
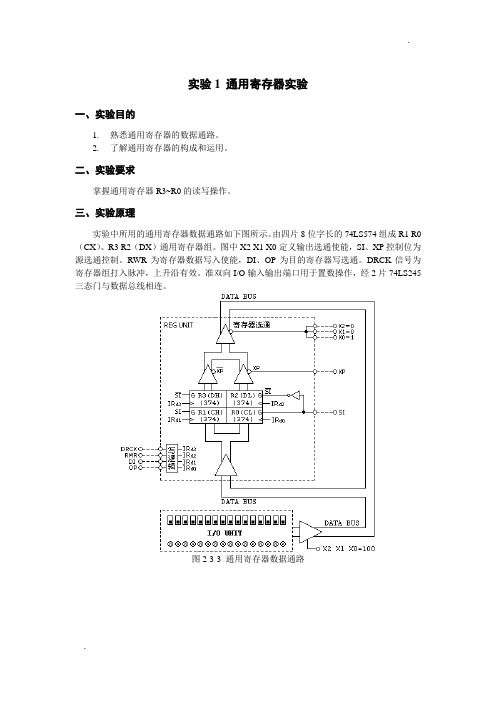
三、实验原理实验中所用的通用寄存器数据通路如下图所示。
由四片8位字长的74LS574组成R1 R0(CX)、R3 R2(DX)通用寄存器组。
图中X2 X1 X0定义输出选通使能,SI、XP控制位为源选通控制。
RWR为寄存器数据写入使能,DI、OP为目的寄存器写选通。
DRCK信号为寄存器组打入脉冲,上升沿有效。
准双向I/O输入输出端口用于置数操作,经2片74LS245三态门与数据总线相连。
图2-3-3 通用寄存器数据通路四、实验内容1.实验连线2.寄存器的读写操作①目的通路当RWR=0时,由DI、OP编码产生目的寄存器地址,详见下表。
通用寄存器“手动/搭接”目的编码②通用寄存器的写入通过“I/O输入输出单元”向R0、R1寄存器分别置数11h、22h,操作步骤如下:通过“I/O输入输出单元”向R2、R3寄存器分别置数33h、44h,操作步骤如下:③源通路当X2~X0=001时,由SI、XP编码产生源寄存器,详见下表。
通用寄存器“手动/搭接”源编码④通用寄存器的读出五、实验心得通过这个实验让我清晰的了解了通用寄存器的构成以及通用寄存器是如何运用的,并且熟悉了通用寄存器的数据通路,而且还深刻的掌握了通用寄存器R3~R0的读写操作。
实验2 运算器实验一、实验目的掌握八位运算器的数据传输格式,验证运算功能发生器及进位控制的组合功能。
二、实验要求完成算术、逻辑、移位运算实验,熟悉ALU运算控制位的运用。
三、实验原理实验中所用的运算器数据通路如图2-3-1所示。
ALU运算器由CPLD描述。
运算器的输出FUN经过74LS245三态门与数据总线相连,运算源寄存器A和暂存器B的数据输入端分别由2个74LS574锁存器锁存,锁存器的输入端与数据总线相连,准双向I/O输入输出端口用来给出参与运算的数据,经2片74LS245三态门与数据总线相连。
《计算机组成原理》实验报告
《计算机组成原理》实验报告实验1:汉字编码实验一、函数解释1. =CHAR(($A2+160)*256+B$1+160)此函数是返回对应数字代码的字符,函数中的$A2的含义是:混合地址(绝对地址+相对地址),而且是单元格的对应的字符是随函数变化而变化的。
函数中的B$1也是一个混合地址,但其是个定单元格,不会随着此函数的单元格变化而变化。
而($A2+160)是区内码向机内码转化的公式,机内码=(区内码)16 +A0A0H 。
完成后的截图如下:2.=LEN($B$1) 是计算要转换的汉字数量,并且利用CODE函数返回文本串中第一个字符的数字代码。
3.=IF(LEN($B$1)>=B3,MID($B$1,B3,1),"") 表示下列是:要转换的汉字。
INT(CODE(C3)/256)-160表示下列是:计算汉字的区码(区号)。
=MOD(CODE(C3),256)-160表示下列是:计算汉字的位码(位号)。
以“西安交通大学城市学院”为例,将该汉字组按上述步骤转化后的显示如下:二、字模显示用Microsoft Visual C++软件执行程序的源代码,与我们要欲给Visual Studio 安装图形库graphics.h的原理是相同的。
故主界面如下所示:输入名字的最后一个字:艺!显示如下:以16进制格式显示字模码,函数中明确规定:if(mat[i*2+j]&(0x80>>k)) { //若字模码在该位是1,则画出一个白色填充方格bar(20+12*(j*8+k),60+12*i,20+12*(j*8+k)+12,60+12*i+12);outtextxy(240+12*(j*8+k),60+12*i, '1'); }else { //若字模码在该位是0,则画出一个白色边框方格rectangle(20+12*(j*8+k),60+12*i,20+12*(j*8+k)+12,60+12*i+12);outtextxy(240+12*(j*8+k),60+12*i, '0');} }三.总结本次实验结束后,学到了很多知识。
计算机组成原理实验
1. 采用 Cache-Memory 存储层次。 2. 地址长度为 16 位,数据寄存器长度 16 位,存储字长是 8 位,采用小端存储模式。 3. Cache 采用二路组相联,Cache 大小为 1KB,每个字块 4 个字,字长为 2B。 4. 能根据有效地址读 Cache 和内存,把数据读入数据寄存器中;能根据有效地址把
1、 运算器由 ALU,状态寄存器,通用寄存器组成。 2、 ALU 能够进行加、减、乘、除等四则运算,与、或、非、异或等逻辑运算以及移
位求补等操作。其中乘除法要实现原码 1 位乘、补码 1 位乘(Booth)、原码加减 交替除法、补码加减交替除法 4 种算法。选作原码/补码 2 位乘算法。 3、 通用寄存器组用于保存参加运算的操作数和运算结果。 4、 状态寄存器用于记录算术、逻辑运算的结果状态。程序设计中,这些状态通常用 作条件转移指令的判断条件,所以又称为条件码寄存器。一般均设置如下几种状 态位:零标志位(Z),负标志位(N),溢出标志位(v),仅为或借位标志(C)。 【输入】从 ins_input.txt 读入。每行有一个操作码和两个操作数,用空格分开,操作数用原 码表示。 e.g. Add 0.110111 1.101110 Sub 0.100111 0.101011 Mul 1.101110 0.110111 【输出】将运算过程和结果输入到 output.txt 例如: ori_onebit_times [x]ori=1.101110 [y]ori=0.110111 x*=0.101110 y*=0.110111 0.000000 110111 + 0.101110 -------------------------------0.101110 0.010111 0 11011 + 0.101110 -------------------------------1.000101 0 0.100010 10 1101 + 0.101110 -------------------------------1.010000 10 0.101000 010 110 0.010100 0010 11 + 0.101110 -------------------------------1.000010 0010 0.100001 00010 1 + 0.101110 --------------------------------
计算机组成原理全部实验

计算机科学技术系王玉芬2012年11月3日基础实验部分该篇章共有五个基础实验组成,分别是:实验一运算器实验实验二存储器实验实验三数据通路组成与故障分析实验实验四微程序控制器实验实验五模型机CPU组成与指令周期实验实验一运算器实验运算器又称作算术逻辑运算单元(ALU),是计算机的五大基本组成部件之一,主要用来完成算术运算和逻辑运算。
运算器的核心部件是加法器,加减乘除运算等都是通过加法器进行的,因此,加快运算器的速度实质上是要加快加法器的速度。
机器字长n位,意味着能完成两个n位数的各种运算。
就应该由n个全加器构成n位并行加法器来实现。
通过本实验可以让学生对运算器有一个比较深刻的了解。
一、实验目的1.掌握简单运算器的数据传输方式。
2.掌握算术逻辑运算部件的工作原理。
3. 熟悉简单运算器的数据传送通路。
4. 给定数据,完成各种算术运算和逻辑运算。
二、实验内容:完成不带进位及带进位的算术运算、逻辑运算实验。
总结出不带进位及带进位运算的特点。
三、实验原理:1.实验电路图图4-1 运算器实验电路图2.实验数据流图图4-2 运算器实验数据流图3.实验原理运算器实验是在ALU UNIT单元进行;单板方式下,控制信号,数据,时序信号由实验仪的逻辑开关电路和时序发生器提供,SW7-SW0八个逻辑开关用于产生数据,并发送到总线上;系统方式下,其控制信号由系统机实验平台可视化软件通过管理CPU来进行控制,SW7-SW0八个逻辑开关由可视化实验平台提供数据信号。
(1)DR1,DR2:运算暂存器,(2)LDDR1:控制把总线上的数据打入运算暂存器DR1,高电平有效。
(3)LDDR2:控制把总线上的数据打入运算暂存器DR2,高电平有效。
(4)S3,S2,S1,S0:确定执行哪一种算术运算或逻辑运算(运算功能表见附录1或者课本第49页)。
(5)M:M=0执行算术操作;M=1执行逻辑操作。
(6)/CN :/CN=0表示ALU运算时最低位加进位1;/CN=1则表示无进位。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
河南农业大学
计算机组成原理实验报告
题目简单机模型实验
学院信息与管理科学学院
专业班级计算机科学与技术2010级1班
学生姓名张子坡(1010101029)
指导教师郭玉峰
撰写日期:二○一二年六月五日
一、实验目的:
1.在掌握各部件的功能基础上,组成一个简单的计算机系统模型机;
2.了解微程序控制器是如何控制模型机运行的,掌握整机动态工作过程;
3定义五条机器指令,编写相应微程序并具体上机调试。
二、实验要求:
1.复习计算机组成的基本原理;
2.预习本实验的相关知识和内容
三、实验设备:
EL-JY-II型计算机组成原理试验系统一套,排线若干。
四、模型机结构及工作原理:
模型机结构框图见实验书56页图6-1.
输出设备由底板上上的四个LED数码管及其译码、驱动电路构成,当D-G和W/R均为低电平时将数据结构的数据送入数据管显示注:本系统的数据总线为16位,指令、地址和程序计数器均为8位。
当数据总线上的数据打入指令寄存器、地址寄存器和程序寄存器时,只有低8位有效。
在本实验我们学习读、写机器指令和运行机器指令的完整过程。
在机器指令的执行过程中,CPU从内存中取出一条机器指令到执行结束为一个指令周期,指令由微指令组成的序列来完成,一条机器指令对应一段微程序。
另外,读、写机器指令分别由相应的微程序段来完成。
为了向RAM中装入程序和数据,检查写入是否正确,并能启动程序执行,必须设计三个控制操作微程序。
存储器读操作(MRD):拨动清零开关CLR对地址、指令寄存器清零后,指令译码器输入CA1、CA2为“00”时,按“单步”键,可对RAM连续读操作。
存储器写操作(MWE):拨动清零开关CLR对地址、指令寄存器清零后,指令译码器输入CA1、CA2为“10”时,按“单步”键,可对RAM连续写操作。
启动程序(RUN):拨动开关CLR对地址、指令寄存器清零后,指令译码器输入CA1、CA2为“11”时,按“单步”键,即可转入第01号“取指”微指令,启动程序运行。
注:CA1、CA2由控制总线的E4、E5给出。
键盘操作方式有监控程序直接对E4、E5赋值,无需接线。
开关方式时可将E4、E5接至控制开关CA1、CA2,由开关控制。
五、实验内容、分析及参考代码:
生成的下一条微地址
UA5 UA0
MS5 MS0
微地址
41221404
2231511
621
731
4P CA P I P I SA P CA P I P I SA P I SA P I SA SA ⋅+⋅+⋅=⋅+⋅+⋅=⋅=⋅==
进行P1测试时,P1为0,其他都为1。
进行P4测试时,P4为0,其他都为1。
当SA4-SA0为0时,对应的UA4-UA0被置1,否则UA 保持MS 原值不变。
1. 根据上面的逻辑表达式,分析56页图6-2的P1测试和P4测试
两条微指令的微地址转移方向。
P1测试时SA4=1、SA3=1、SA2=1、SA1=0、SA0=1,表明SA1对应位置1生成的下一条微地址001010,进入12号单元,12号单元的F3字段为101不是任何测试,所以就进入07号单元,把01H 送入BX ,07号单元的F3字段为111无操作,回到01号单元的取指阶段。
同理,可得ADD 指令的地址转移方向。
P4测试时,它以CA1、CA2作为测试条件,出现读写机器指
令、直接运行机器指令三路分支,占用三个固定的地址元。
P4测试是对内存读、写或者直接运行程序,此时可得到SA4=1,
SA3=SA2=1,当CA1、CA2为“00”时SA1=SA0=1,全1则原样输出既010000,进入20号单元。
20单元的F3字段为101,LPC 不是任何测试, 所以,下址字段为010010,既进入22号单元。
22单元的F3字段为111无操作,下址字段为010111,进入27号单元,而27单元的F3字段为111,无操作下址字段为010000,所以又回到20号单元,开始循环。
同理,当CA1、CA2为“10”时可得到SA1=0,SA0=1,则把SA0对应位置1,既010001进入微地址21,按照
“010001”、“010100”、“011000”方式循环。
当CA1、CA2为“11”时可得到SA1=SA0=0对应置1,生成下一条微地址为010011
既23号单元,23单元的F3字段为111无操作生成的下址字段为000001,进入到取指阶段01号单元开始程序运行。
2.分析实验六中的五条机器指令的执行过程
引用以下代码及机器指令再分析
0000 0000 0000 0000 IN AX,KIN 数据输入电路->AX0000 0001 0010 0001 MOV BX,01H 0001H->BX
0000 0010 0000 0001
0000 0011 0001 0000 ADD AX,BX AX+BX->AX
0000 0100 0001 0000 OUTDISP AX AX->输出显示电路0000 0101 0100 0000 JMP 00H 00H->PC
0000 0110 0000 0000
表6-1机器指令表:
关于上面五条机器指令的执行过程。
首先,进入取指阶段,PC 中机器指令的地址送AR,然后PC值加1,RAM中的数上数据总线,指令寄存器的门打开接收数据,操作码进行P1测试经译码后,对于IN AX,KIN取机器指令的高四位对SA4、SA3、SA2、SA1、SA0,判断
后得到下址字段,既进入10号单元完成把输入的数据给AX。
然后,又回到“取指”阶段,“译码”进行P1测试取MOV BX,01H的高四位对SA4、SA3、SA2、SA1、SA0,判断后进入12号单元,执行当前PC中的值送AR,PC值加1,进入07号单元执行RAM中的数01H 上数据总线,寄存器BX接收数据。
回到公用微指令“取指”,“译码”阶段,进行P1测试再取ADD AX,BX取出它的高四位对SA4、SA3、SA2、SA1、SA0判断进入11号单元寄存器AX的内容送数据总线LT1接收数据,进入03单元BX的内容上数据总线LT2接收进入06号单元LT1与LT2数据之和送给AX,最后回到取指阶段继续执行译码后取OUT DISP,AX ,P1测试后进入13号单元把寄存器AX的内容输出显示,然后回到取指阶段。
最后执行JMP指令经P1测试进入14号单元,当前PC值送AR,然后加1,进入15号单元RAM中的数据上数据总线,把跳转地址送给PC,最后转向取指阶段。
3.修改MOV指令,使送入BX中的值为02H。
把02H送给BX,达到修改01H,MOV BX,01H为双字长第二个字为操作数01H。
把操作数改成0000 0010即可。
4.设计一条机器指令,IN BX , KIN 数据输入电路->BX,微程序入口地址为16。
将原程序中的MOV指令替换,再运行,写出执行过程和结果。
机器指令助记符说明
0110 0001 IN BX,KIN 数据输入电路->BX
机器指令执行,在取指阶段01号单元PC送AR,PC值加1,进入02单元RAM数据上数据总线指令寄存器门打开接收数据,P1
测试译码后,进入16号单元把数据送入BX,回到取指阶段译码。
回到01号单元的取指阶段。
5.设计一条机器指令,SUB AX,BX AX-BX->AX ,微程序入口地址为17。
将原程序中的ADD指令替换,再运行,写出执行过程和结果。
机器指令助记符说明
0111 0000 SUB AX,BX AX-BX->AX 机器指令执行,在取指阶段01号单元PC送AR,PC值加1,进入02单元RAM数据上数据总线指令寄存器门打开接收数据,P1测试译码后,执行SUB AX,BX过程中,首先经过取指阶段P1测试译码微指令进入到17号单元,寄存器AX中的数上数据总线,然后暂存器LT1接收,接着进入04号单元BX中的数上数据总线暂存器
LT2接收,进入05号单元时执行LT1-LT2->AX,最后转到取指阶段。
表6-2机器指令表:
表6-3
六、实验问题错误分析
实验中老是出现数据结果不对,与同学一起探讨才知道是有一条排线连错了,还有就是有马虎造成的错误,做这类实验时一定要细心。
七、心得体会
通过这次做实验我发现一定首先要仔细听老是的课,老师第一遍带领同学们分析实验室很重要的!一定不能错过!再者,如果试验中遇到不明白的问题一定要及时与老师沟通或者与同学们一起探讨,一定要懂得不懂就问!。