6-1串联校正
山东大学 自动控制原理 6-1串联校正

5
加入校正装置后使未校正系统的缺陷得到补偿,这 就是校正的作用。 6.1.2 校正方式 常用的校正方式有串联校正、反馈校正、前馈校 正和复合校正四种。 串联校正装置一般接在系统误差测量点之后和放大 器之前,串接于系统前向通道之中;反馈校正装置接 在系统局部反馈通道之中。
串联 校正 控制 器 对 象
1 aTs Gc ( s ) 1 Ts
(1)零极点分布图:
∵a 1
1/T
1/aT
0
∴零点总是位于极点之右,二者的距离由常
14
数a决定。零点的作用大于极点,故为超前网络。
(2)对数频率特性曲线: L()/dB 20dB/dec
1 aTs Gc ( s ) 1 Ts
20lga
特性曲线G(s )/k1所示,但稳态误差也要随之增加,所 以开环放大系数是不能减小的。而改变未校正系统的 其它参数都是比较困难的。这样就得在原系统的基础 上采取另外一些措施,即对系统加以“校正”。 所谓的“校正”,就是在原系统中加入一些参数 可以根据需要而改变的机构或装置,使系统整个特性 发生变化,从而满足给定的各项性能指标。这一附加 的装置称为校正装置。
可见,m出现在1 =1/aT 和2 =1/T 的几何中点。
1 sin m a 1 sin m
上式表明,m仅与a有关。a值选得越大,则超前网络的 微分作用越强。但为了保持较高的系统信噪比,实际选用 的a值一般不大于20。此外,m处的对数幅频值为
Lc ( m ) 10 lg a
17
L()/dB 20dB/dec 10lga 0 20lga
1 aT
1 T
()
0
m m
m
《自动控制原理》第6章_自动控制系统的校正

改善系统瞬态响应。
校正装置分类
校正装置按 控制规律分
超前校正(PD) 滞后校正(PI)
滞后超前校正(PID)
校正装置按 实现方式分
有源校正装置(网络) 无源校正装置(网络)
有源超前校正装置
R2
u r (t)
i 2 (t)
R1
i1(t)
(aTa s
1)(Tb a
s
1)
滞后--超前网络
L'()
20db / dec
20 lg K c
1 1/ T1 2 1/ T2
设相角为零时的角频率
1
()
a)
20db / dec
5
1 T1T2
90
5 校正网络具有相
5
位滞后特性。
90
b)
5 校正网络具有相位
超前特性。
G( j)
Kc
( jT1
G1 (s)
N (s) C(s)
G2 (s)
性能指标
时域:
超调量 σ%
调节时间 ts
上升时间 tr 稳态误差 ess
开环增益 K
常用频域指标:
开环频域 指标
截止频率: 相角裕度:
c
幅值裕度:
h
闭环频域 指标
峰值 : M p
峰值频率: r
带宽: B
复数域指标 是以系统的闭环极点在复平面
上的分布区域来定义的。
解:由稳态速度误差系数 k v 1应00 有
G( j)
100
j( j0.1 1)( j0.01 1)
100 A()
1 0.012 1 0.00012
基本概念两种常用校正装置设计方法频率法2

第六章1. 基本概念2. 两种常用校正装置3. 设计方法(1)频率法(2)根轨迹法(3)复合校正 6—1 校正的基本概念一、性能指标的提法:1.稳态误差:Ess 或v Kp Kz Kv 2.动态品质:(1) 时域指标:δ% ts (2)开环频域指标:Wc ν(3)闭环频域指标:Mr Wr 或Wb 如何改变性能的问题?1. 改变系统参数:增大开环传递函数K →ess ↓→h ↘v ↘→σ(改善很有限,且稳态与动态有些矛盾)2. 改变系统结构:增加辅助装置定义:利用增加辅助装置改变系统性能方法称为— 辅助装置包括:校正装置 、控制器、调节器二、校正方式:1. 串联校正:图P36 2. 反馈校正:图 3. 复合校正:(1)按给定输入的 图 目的:理论上可以做到:C (S )=R (S )即C (t )=R (t )(2)按扰动输入的 图 目的:理论上完全消除N (s )对输入影响Cr (s )=0工程上一般采用近似补偿 三、设计方法 (频域法) 1. 试探法(分析法)首先根据检验选定校正装置的基本形式→算出校正装置的参数→检验校正后的性能指标→是否符合; 如果符合则完成设计 ;否从新设计2.综合法(数学法)首先由要求的性能指标→画出希望的开环L(w)曲线→再与原系统的L (W )想比较→得到校正装置的Lc(w)→反写出校正装置的传函6—2常用的校正装置分类:讨论电的校正装置1。
无源校正装置(RC 网络)2。
有源校正装置(运放器)调节器一、无源超前校正装置(RC 网络 传函 伯德图) 电路:U2U1CR2R1传函:(复阻抗法)Gc(s)=1+Tas/a(1+Ts) a 衰减系数 T 时间常数必须补偿a 的衰减:把原K 增加a 倍或再串一个放大器(a 倍) 补偿后:aGc(s)=1+TaS/1+TS (a>1) 二、无源迟后校正装置 电路;6—3一、超前校正问题的提出 例:系统如图所示,要求1. 在单位斜坡输入下稳态误差ess<0.1;2. 开环剪切频率3. 相角裕度 幅值裕度问是否需要校正,怎样校正?解:首先进行稳态计算K=10可以满足稳态误差要求。
自控控制原理习题_王建辉_第6章答案
看到别人设定的下载币5块钱一个,太黑了。
为了方便各位友友都有享受文档的权利,果断现在下来再共享第六章控制系统的校正及综合6-1什么是系统的校正?系统的校正有哪些方法?6-2试说明超前网络和之后网络的频率特性,它们各自有哪些特点?6-3试说明频率法超前校正和滞后校正的使用条件。
6-4相位滞后网络的相位角滞后的,为什么可以用来改善系统的相位裕度?6-5反馈校正所依据的基本原理是什么?6-6试说明系统局部反馈对系统产生哪些主要影响。
6-7在校正网络中,为何很少使用纯微分环节?6-8试说明复合校正中补偿的基本原理是什么?6-9选择填空。
在用频率法设计校正装置时,采用串联超前网络是利用它的(),采用串联滞后校正网络利用它的()。
A 相位超前特性B 相位滞后特性C 低频衰减特性D 高频衰减特性6-10 选择填空。
闭环控制系统因为有了负反馈,能有效抑制()中参数变化对系统性能的影响。
A 正向通道 B反向通道 C 前馈通道6-11 设一单位反馈系统其开环传递函数为W(s)=若使系统的稳态速度误差系数,相位裕度不小于,增益裕量不小于10dB,试确定系统的串联校正装置。
解:→所以其对数频率特性如下:其相频特性:相位裕度不满足要求设校正后系统为二阶最佳,则校正后相位裕度为,增益裕量为无穷大。
校正后系统对数频率特性如下:校正后系统传递函数为因为所以串联校正装置为超前校正。
6-12设一单位反馈系统,其开环传递函数为W(s)=试求系统的稳态加速度误差系数和相位裕度不小于35的串联校正装置。
解:所以其对数频率特性如下:其相频特性:相位裕度不满足要求,并且系统不稳定。
设校正后系统对数频率特性如上(红线所示):则校正后系统传递函数为因为在时(见红线部分),,则→选取,则校正后系统传递函数为其相频特性:相位裕度满足要求。
校正后的对数频率曲线如下:因为所以校正装置为滞后-超前校正。
6-13设一单位反馈系统,其开环传递函数为W(s)=要求校正后的开环频率特性曲线与M=4dB的等M圆相切,切点频率w=3,并且在高频段w>200具有锐截止-3特性,试确定校正装置。
自动控制原理第6章习题解——邵世凡

习 题 66-1 设控制系统的开环传递函数为:()()()s s s s G 1.015.0110++= 绘出系统的Bode 图并求出相角裕量和幅值裕量。
若采用传递函数为(1+0.23s)/(1+0.023s)的串联校正装置,试求校正后系统的幅值和相角裕度,并讨论校正后系统的性能有何改进。
6—2设控制系统的开环频率特性为()()()()ωωωωωj j j j H j G 25.01625.011++= ①绘出系统的Bode 图,并确定系统的相角裕度和幅值裕度以及系统的稳定性; ②如引入传递函数()()()0125.025.005.0++=s s s G c 的相位滞后校正装置,试绘出校正后系统的Bode 图,并确定校正后系统的相角裕度和幅值裕度。
6 3设单位反馈系统的开环传递函数为()()()8210++=s s s s G 设计一校正装置,使静态速度误差系数K v =80,并使闭环主导极点位于s=-2±j23。
6-4设单位反馈系统的开环传递函数为()()()93++=s s s K s G ①如果要求系统在单位阶跃输入作用下的超凋量σ =20%,试确定K 值;②根据所确定的K 值,求出系统在单位阶跃输入下的调节时间t s 。
,以及静态速度误差系数; ③设计一串联校正装置,使系统K v ≥20,σ≤25%,t s 减少两倍以上。
6 5 已知单位反馈系统开环传递函数为()()()12.011.0++=s s s K s G 设计校正网络,使K v ≥30,γ≥40º,ωn ≥2.5,K g ≥8dB 。
6-6 由实验测得单位反馈二阶系统的单位阶跃响应如图6-38所示.要求①绘制系统的方框图,并标出参数值;②系统单位阶跃响应的超调量σ =20%,峰值时间t p =0.5s ,设计适当的校正环节并画出校正后系统的方框图。
6-7设原系统的开环传递函数为()()()15.012.010++=s s s s G 要求校正后系统的相角裕度γ=65º。
第六章 线性系统的校正方法

例6-4
调小了开环增益
(快速算)
串联滞后校正基本原理总结:
利用滞后网络或PI控制器的高频幅值衰减特性,使已校正 系统截止频率下降,从而使系统获得足够的相角裕度。因此, 滞后网络的最大滞后角应力求避免发生在系统截止频率附近。
在系统响应速度要求不高而抑制噪声电平性能要求较高的 情况下,可考虑采用串联滞后校正。
理上难以准确实现)
2)频率响应校正设计的实质(问答题)
依据:三段频理论
用频域法设计控制系统的实质,就是在系统中加入频率 特性形状合适的校正装置,使得开环系统频率特性形状变成 所期望的形状:低频段增益充分大,以保证稳态误差要求; 中频段对数幅频特性斜率一般为20dB / dec,并且占据充分宽的 频带,以保证具备适当的相角裕度和时域响应的快速性;高 频段增益尽快减小,以消弱噪声影响。
Gc
(s)
(1 Tas)(1 Tbs)
(1 Tas)(1
Tb
s)
1
5. 串联综合法校正
综合校正方法将性能指标要求转化为期望开环对 数幅频特性,再与待校正系统的开环对数幅频特性 比较,从而确定校正装置的形式和参数。该方法适 用于最小相位系统,但有可能求出来的校正装置无 法物理实现。
6-4. 反馈校正
负实零点
(可提高相角裕度)
例6-2
注:
PID控制器可利用有源装置实现
PID控制器各部分参数的 选择,通常可以在系统现 场进行调试(经验很重 要),最后确定。
注:
PID控制的优点: 校正装置中最常用的是PID控制规律。在科学技D由于它自身的优点仍然是得到最广 泛应用的基本控制规律。
第六章 线性系统的校正方法
▪ 6-1 . 系统的设计与校正问题 ▪ 6-2. 常用校正装置及其特性 ▪ 6-3. 串联校正 ▪ 6-4. 反馈校正 ▪ 6-5. 复合校正 ▪ 6-6. 控制系统校正设计
第6章 控制系统的校正及综合
(s ) =
100 s + 1 s 10
A(ω c ) ≈
100
ωc
ωc
10
=1
ω c = 31.6
31.6 γ (ω c ) = 180° + − 90° − arctan = 17.5° 10
6.2 串联校正
Bode图如下图所示 图如下图所示
6.2 串联校正
γd
γd
频率特性为
jω T + 1 Wc ( jω ) = ⋅ γ d jω T + 1 1
γd
6.2 串联校正
校正电路的Bode图如下:
ω 2 = γ d ω1
ωmax = ω1 ⋅ ω2,ϕ max γ d −1 = arcsin γ d +1
6.2 串联校正
引前校正的设计步骤:
(1)根据稳态误差的要求确定系统开环放大系数,绘制 Bode图,计算出未校正系统的相位裕量和增益裕量。 (2)根据给定相位裕量,估计需要附加的相角位移。 (3)根据要求的附加相角位移确定γd。 (4)确定1/Td 和γd/Td ,使校正后中频段(穿过零分贝线) 斜率为-20dB/十倍频,并且使校正装置的最大移相角 出现在穿越频率的位置上。 (5)计算校正后频率特性的相位裕量是否满足给定要求, 如不满足须重新计算。 (6)计算校正装置参数。
6.2 串联校正
校正电路的Bode图:
6.2 串联校正
例6-3 一系统的开环传递函数为
K W (s ) = s (s + 1 )(s + 2 )
试确定滞后-引前校正装置, 试确定滞后-引前校正装置,使系统满足 下列指标: 下列指标:速度误差系数 K v = 10,相位裕 量 γ (ωc ) = 50°,增益裕量 GM ≥10dB 。
第6章自动控制系统的校正
比例,积分、微分(PID)调节器(相位滞后-超前校正)
PID调节器
R(s)
E (s)
Kp
KI
M (s)
G0 (s)
C (s)
s
KDs
PID调节器的运动方程为:
de(t) m(t) K p e(t) K I e(t)dt K D dt
写成传递函数形式
K Ds 2 K ps K I KI M(s) G e (s) Kp K Ds E(s) s s
式中 KC=R1/R0 ——比例放大倍数 T1=R1C1——积分时间常数
PI调节器的Bode图
其Bode图如图所示。从图可见, PI 调节器提供了负的相位角,所 以 PI 校正也称为滞后校正。并且 PI 调节器的对数渐近幅频特性在 低频段的斜率为-20dB/dec。因而 将它的频率特性和系统固有部分 的频率特性相加,可以提高系统 的型别,即提高系统的 稳态精度 。
6.1.2 有源校正装置 有源校正装置是由运算放大器组成的调节器。有 源校正装置本身有增益,且输入阻抗高,输出阻抗低, 所以目前较多采用有源校正装置。缺点是需另供电源。
有源校正装置
6.2 串联校正 6.2.1 比例(P)校正
RS
比例校正GC(S) 系统固有部分G1(S)
35 s0.3s 10.01s 1
第6章 自动控制系统的校正
一、校正的概念
当控制系统的稳态、静态性能不能满足实 际工程中所要求的性能指标时,首先可以考虑 调整系统中可以调整的参数;若通过调整参数 仍无法满足要求时,则可以在原有系统中增添 一些装置和元件,人为改变系统的结构和性能, 使之满足要求的性能指标,我们把这种方法称 为校正。增添的装置和元件称为校正装置和校 正元件。系统中除校正装置以外的部分,组成 了系统的不可变部分,我们称为固有部分。
自动控制原理第六章

R(s) + -
校正装置 Gc (s)
原有部分 Go(s)
C(s)
R(s)
+ -
+ -
原有部分 Go(s) 校正装置 Gc (s)
C(s)
(a) 串联校正
(b ) 反馈校正
R(s) + -
校正装置 Gc1(s)
+ -
原有部分 Go(s) 校正装置 Gc2(s)
C(s) R(s)
校正装置 Gc (s) + - + + 原有部分 Go(s) C(s)
第六章 线性系统的校正方法
系统的设计与校正问题 常用校正装置及其特性 串联校正 反馈校正
前面几章,我们主要学习了如何分析一个控制系统, 分析控制系统是否稳定,并且通过求解系统暂态性能指标、
稳态误差我们可以评价此系统性能的好坏。
这一章,我们着重介绍如何设计校正装臵使原不满足性 能指标要求的系统满足所要求的性能指标。
制器对系统性能的影响。
R(s) + - E(s) Kp(1 +Tds)
1 Js 2
C(s)
图 6-3 比例-微分控制系统
解 无PD控制器时, 系统的特征方程为
Js2+1=0
显然, 系统的阻尼比等于零, 系统处于临界稳定状态, 即 实际上的不稳定状态。 接入PD控制器后, 系统的特征方程
为
Js2+KpTds+Kp=0
系统由原来的Ⅰ型系统提高到了Ⅱ型系统。若系统的输入 信号为单位斜坡函数, 则无PI控制器时, 系统的稳态误差为1/K;
接入PI控制器后, 稳态误差为零。表明Ⅰ型系统采用PI控制器
后, 可以消除系统对斜坡输入信号的稳态误差, 控制精度大为 改善。 采用PI控制器后, 系统的特征方程为
自动控制原理第6章
二、带宽的确定
Mr
( j 0) 0.707Φ( j 0)
( j )
b的选择要兼顾跟 踪输入信号的能力 和抗干扰的能力。 若输入信号的带宽 为 0~ M,扰动信 号带宽为 1~ 2, 则b=(5~10) M, 且使 1~ 2 置于b 之外。
0
r b
输入信号
R( jw)
结束
6-2 PID控制器及其控制规律
• 注明:讲课顺序调整,本节内容在教材 P246~ P248和P254~P257
比例-积分-微分(PID)控制器 是串联校正 中常用的有源校正装置。 PID (Proportional Integral Derivative)是实 际工业控制过程中应用最广泛、最成功的一种控 制规律。 PID :对偏差信号e(t)进行比例、积分和微分运 算变换后形成的一种控制规律。
系统的闭环零点改变 系统的闭环极点未改变 增加系统抑制干扰的能力 稳定性未受影响
u0
+
ug
+
△u 电压
+
u1 功率
+
+ ua
R
n
SM 负 载
放大
放大
电压 放大
i
+
un
TG
图1-8 电动机速度复合控制系统
说明:
串联校正和反馈校正都属于主反馈回路之内的校
正。 前馈补偿和扰动补偿则属于主反馈回路之外的校 正。 对系统校正可采取以上几种方式中任何一种,也 可采用某几种方式的组合。
给定 元件
比较 元件
-
串联 校正元件
-
放大 元件
执行 元件
自动控制原理(胥布工)第二版6-7-8章习题及详解
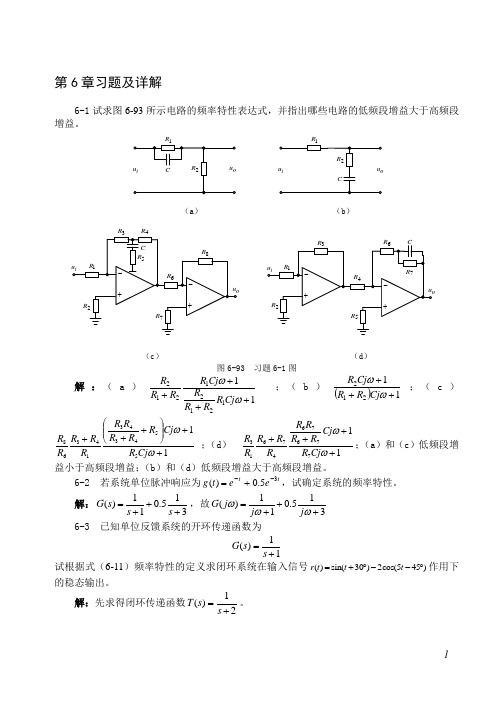
第6章习题及详解6-1 试求图6-93所示电路的频率特性表达式,并指出哪些电路的低频段增益大于高频段增益。
(a ) (b )R R(c ) (d )图6-93 习题6-1图解:(a )1112121212++++ωωCj R R R R Cj R R R R ;(b )()11212+++ωωCj R R Cj R ;(c )1155434314368++⎪⎪⎭⎫ ⎝⎛+++ωωCj R Cj R R R R R R R R R R ;(d ) 117767647613++++ωωCj R Cj R R R R R R R R R ;(a )和(c )低频段增益小于高频段增益;(b )和(d )低频段增益大于高频段增益。
6-2 若系统单位脉冲响应为t t e e t g 35.0)(--+=,试确定系统的频率特性。
解:315.011)(+++=s s s G ,故315.011)(+++=ωωωj j j G 6-3 已知单位反馈系统的开环传递函数为11)(+=s s G 试根据式(6-11)频率特性的定义求闭环系统在输入信号()sin(30)2cos(545)r t t t =+︒--︒作用下的稳态输出。
解:先求得闭环传递函数21)(+=s s T 。
(1)1=ω,447.055211)1(==+=j j T ,︒-=-=∠56.2621arctan )1(j T 。
(2)5=ω,186.02929251)5(==+=j j T ,︒-=-=∠20.6825arctan )5(j T 。
故)2.1135cos(372.0)44.3sin(447.0)(︒--︒+=∞→t t t y t 。
6-4 某对象传递函数为s e Ts s G τ-+=11)( 试求:(1) 该对象在输入()sin()u t t ω=作用下输出的表达式,并指出哪部分是瞬态分量; (2) 分析T 和τ增大对瞬态分量和稳态分量的影响;(3) 很多化工过程对象的T 和τ都很大,通过实验方法测定对象的频率特性需要很长时间,试解释其原因。
试求图示有源网络的传递函数和Bode图

习 题6-1 试求图示有源网络的传递函数和Bode 图,并说明其网络特性。
6—2 已知单位反馈控制系统的开环传递函数为)12.0(10)(+=s s s G 当串联校正装置的传递函数)(s G c 如下所示时:(1)105.012.0)(++=s s s G c (2) )110()1(2)(++=s s s G c 1.试绘出两种校正时校正前和校正后系统Bode 图;2.试比较两种校正方案的优缺点。
6—3 已知单位反馈系统的对数幅频特性曲线如图中)(0ωL ,串联校正装置)(s G c 的对数幅频特性如图中)(ωc L ,要求:1.在图中画出系统校正后的对数幅频特性)(ωL ;2.写出校正后系统的开环传递函数;3.分析校正装置)(s G c 对系统的作用。
6—4系统的结构图如图所示,试利用根轨迹法设计超前校正装置,使系统满足下列性能指标7.0=ζ,s t s 4.1=,12-=s K v 。
6—5 已知一单位反馈系统的开环传递函数为)11.0(200)(+=s s s G试设计一校正装置,使系统的相角裕量︒≥45γ,剪切频率150-≥s c ω。
6—6 单位反馈系统的开环传递函数为)12(4)(+=s s s G c 设计一串联滞后校正装置,使系统相角裕量︒≥40γ,并保持原有的开环增益。
6—7 设单位反馈系统的开环传递函数为)125.0)(11.0(5)(++=s s s s G 试设计一校正装置,使系统满足下列性能指标,速度误差系数15-=s K v ,相角裕量︒≥40γ,剪切频率15.0-≥s c ω。
6—8 单位反馈系统的开环传递函数为)105.0)(125.0(10)(++=s s s s G 若要求校正后系统的谐振峰值4.1=r M ,谐振频率110-≥s r ω,试确定校正装置的形式与参数。
6—9单位反馈系统的结构如图所示,现用速度反馈来校正系统,校正后系统具有临界阻尼比1=ζ,试确定校正装置参数t K 。
自动控制原理--串联超前校正
用频率法对系统进行串联超前校正的一般步骤可归纳为
(校正后截止频率已知):
根据稳态误差的要求,确定开环增益K。
校正装置传递函数
Gc
(s)
0.4s 0.1s
1 1
画出校正后系统的波德图并验证已校正系统的相角裕度。
校正后系统的开环传递函数为
Gc (s)G0 (s)
10(0.4s 1) s(0.1s 1)(0.8s 1)
开环对数渐进幅频特性如伯特图中红线所示。校正后系 统的相位裕量为
" 180 90 tan1 4 tan1 2 tan1 0.5 50.9
G(S) k S (S 1)
• 若要求系统对单位斜坡输入信号的稳态误差ess 0,.1相角裕
度 45, 试确定系统的串联校正网络
兰----校正前 红色----校正装置 绿色----校正
-20
-40
20
-20
1 2.2
3.1
4.4
8.8 -40
G(s) K s(0.8s 1)
m c 5rad / s(已知) 在校正后系统的开环截止频率处原系统的幅值与校正 装置的幅值大小相等、符号相反
Lo (c)
20
lg
10
c 0.8c
10
lg
由超前校正网络特性
m
T
1
求出α=4 求出T=0.1
方法二
a.根据相位裕量要求估算超前校正装置的相位超前量
满足系统的性能指标要求。
基于上述分析,可知串联超前校正有如下特点:
第6章线性系统的校正方法

① 闭环带宽要求较高. 若已校正系统带宽过大, 使得通过 系统的高频噪声电平很高, 不符合对系统的性能要求 .
② 对截止频率附近相角迅速减小的待校正系统, 不宜采用 串联超前校正. 因为很难提供足够的相角超前量. 此时可考虑 两个或两个以上串联校正网络由隔离放大器串联在一起使用.
图6-2 串联校正与反馈校正
前馈校正又称顺馈校正, 是在系统主反馈回路之外采用的 校正方式.前馈校正装置接在系统给定值(或指令、参考输入信 号)之后, 主反馈作用点之前的前向通道上, 如图(a)所示.
(a)
另一种前馈校正装置接在系统可测扰动作用点与误差测 量点之间, 对扰动信号进行测量,并经变换后接入系统,形成一 条附加的对扰动影响进行曲补偿的通道, 如图(b)所示.
由
最大超前角为 m arctgaTm arctgTm
根据三角函数两角求和公式 仅与a有关, 一般a≤20.
m处的对数幅值为 Lm 20lg aGc ( jm) 10lg a
2 无源滞后网络 滞后网络传递函数为
式中分度系数 时间常数
传递函数与超前网络相似, 超前a>1, 滞后b<1
最大滞后角m发生在最大滞 后角频率m处, 且是1/T与1/bT 的几何中心. m及m分别为
为了使系统满足性能指标要求, 要对系统进行调整, 通常 首先调整系统开环增益值. 这是一种最简单的方法. 但是在多 数情况中, 仅改变增益仍有可能不满足给定性能指标的要求. 此时就需要在系统中引入称之为校正装置的附加装置.
所谓校正就是在系统中加入一些其参数可以根据需要而 改变的机构或装置,使系统整个特性发生变化,从而满足给 定的各项性能指标要求。
串联滞后校正设计的一般步骤.
自动控制原理第6章 部分题解 (1)资料

试设计串联校正装40Biblioteka 置,使系统满足20
(1) Kv 126
0.1 1
-20
(2) 30,c 20 s1 -40
[-40]
60
10 c 100
1000 /s-1
[-60]
解:系统为I型系统,其Kv=K,取K=150 画出原系统的开环对数幅频特性曲线:
10
c 38.7 20
L()/dB
20 40lg c 20lg K 43.5
-20dB/dec 0dB/dec
(dB)
(a)
三种串联校正装置如图所示,
20dB/dec
0dB/dec
均为最小相位环节,问: (1)哪种校正装置使系统
ω 0.1 1.0 10 100
(b)
稳定性最好?
(dB)
(2)为了将12Hz的正弦噪
0.1 1.0 2.0 10 40 100
ω
声削弱10倍,应采用哪种校 正? (f=12Hz , =2f75rad/s)
ω
20dB/dec
-20dB/dec
7
(c)
L()/dB
画出串入图(c)校正装 置后系统的Bode图
60
G0 (s)
400 s2 (0.01s
1)
(dB)
0.1 1.0 10 100
ω
40
[-40]
-20dB/dec 0dB/dec
20
2
40
(dB)
(a) 0dB/dec
20dB/dec
0.1 1 -20
0.1 1.0 10 100
ω
40
[-40]
-20dB/dec 0dB/dec
自动控制原理胡寿松第六版第六章

闭环传递函数为 ( s) 1 /( Js 2 1) 增加PD校正后,系统的闭环传递函数为 ( s) K F (1 s) /( Js 2 K Ps K P )
效果:1)增加了阻尼;2)增加了一个 闭环零点;3)不影响稳态误差。
积分(I)控制规律 一般很少单独使用。 比例—积分(PI)控制规律 一般很少单独使用。
L( ) 20 lg a
( )
1 / aTa 1 / Ta 1 / Tb
a / Tb
表6-1 常见的无源 校正网络
• 有源校正装臵
用运算放大器来构成的校正装臵,由于装臵工作时,除了连接输入
和输出端外,换需外接电源(功率源),称为有源装臵。
同样的校正装臵,可以用无源网络也可用有源网络来实现,从功能
1/ T 1 / aT 零极点分布
最大超前角计算
(a 1)T ( ) tan (aT ) tan (T ) tan 1 aT 2 2 极值点 m 1 / aT ,即极值点在1 / aT 和 1 / T 的几何中心。
1 1 1
最大超前角
m tan 1
0 40
低频段1/s -20db/dec
位臵确定1: 与ω=1的交 点位臵 位臵确定2: 延长线与ω 轴的交点位 臵 100 ω=1处,增 加一贯性环 节,斜率增 加-20
20 lg K 20
1
K 1/ 10
4 .4
( )0.1
90o 180o
10
36.9o 12.8o
④比较期望系统与实际系统的差,确定校正量 在期望的截止频率 "c 4.4rad / s 处,幅值为-6db,相角为-167.2o 20 lg Gc ( j "c ) 6db Gc ( j "c ) 32.2o "c 4.4rad / s 时, 校正量:
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
显然,超前网络对频率在1/aT至1/T之间的输入信号 有明显的微分作用,在该频率范围内,输出信号相角比 输入信号相角超前,超前网络的名称由此而得。当频率
等于最大超前角频率m时,相角超前量最大,以m表 示,而m又正好是 1 =1/aT和2 =1/T的几何中点。现证
明如下:
c ( ) arctan aT arctan T
分度系数
T R1R2 C 时间常数
R1 R2
13
采用无源超前网络进行串联校正时,校正后系统的
开环放大系数要下降a倍,这样就满足不了稳态误差的 要求,因此网络对开环放大系数的衰减需由提高放大器
放大系数来补偿。现设网络对开环放大系数的衰减已由
提高放大器放大系数所补偿,则无源超前网络的传递函
数可写为
应当指出,不论是分析法或综合法,其设计过程 一般仅适用于最小相位系统。
在频域内进行系统设计,是一种间接设计方法。 因为设计结果满足的是频域指标,而不是时域指标。 然而,在频域内进行设计又是一种简便的方法,在伯 德图上虽然不能严格定量地给出系统的动态性能,但 却能方便地根据频域指标确定校正装置的参数,特别 是对已校正系统的高频特性有要求时,采用频域法校 正较其它方法更为简便。
前馈 校正
控制
对
器
象
7
前馈校正
控制器
对象
前馈校正可以单独作用于开环控制系统,也可以作为 反馈控制系统的附加校正而组成复合控制系统。
复合校正方式是在反馈控制回路中,加入前馈校 正通路,组成一个有机整体,有按扰动补偿的复合控 制形式和按输入补偿的复合控制形式。
8
Gn(s) G1(s)
Gr(s) G1(s)
10
6.1.3 设计方法 在线性控制系统中,常用的校正装置设计方法有
分析法和综合法两种。 分析法又称试探法。用分析法设计校正装置比较
直观,在物理上易于实现,但要求设计者有一定的工 程设计经验,设计过程带有试探性。
综合法又称期望特性法。这种设计方法从闭环系 统性能与开环系统特性密切相关这一概念出发,根据 性能指标要求确定出希望开环特性的形状,然后与系 统原有开环特性相比较,从而确定校正方式、校正装 置的形式和参数。综合法有广泛的理论意义,但希望 的校正装置传函可能相当复杂,,相当多的场合还是先给定受控对象,之
后进行系统设计。但无论如何,对受控对象要作充分的
了解是不容置疑的。
了解对象的工作原理和特点,如哪些参数需要控制
,哪些参数能够测量,可通过哪几个机构进行调整,对
象的工作环境和干扰等等。
2
2.性能指标
自动控制系统是根据它所完成的具体任务设计的。
任务不同,对自动控制系统性能的要求也不同。
常见的时域指标有:
ess p% tr ts 系统的无差度N 等;
常见的频域指标有:
c h 20lgh 和 r b Mr等。
性能指标不应当比完成所需要的指标更高。如调速
系统对平稳性和稳态精度要求严格,而随动系统则对快
速性期望更高。
3.改善系统性能的方法
在进行系统设计时,常常遇到初步设计出来的系统
不能满足已给出的所有性能指标的要求。
第六章 控制系统的校正
主要内容: 1.校正的原理 2.常用校正装置及其特性 3.频率响应法校正
1
6.1 校正的基本概念
6.1.1 校正的定义
1.被控对象
被控对象和控制装置同时进行设计是比较合理的。
充分发挥控制的作用,往往能使被控对象获得特殊的、
良好的技术性能,甚至使复杂的被控对象得以改造而变
得异常简单。某些生产过程的合理控制可以大大简化工
6.2 典型校正装置 6.2.1 典型无源超前校正网络
超前校正网络的电路图如下图所示。图中,U1为
输入信号,U2为输出信号。
12
如果输入信号源的内阻 为零,而输出端的负载阻抗 为无穷大,则无源超前网络 U1 的传递函数可写为
C
R1
R2
U2
1 1 aTs
Gc (s)
a
1 Ts
式中
a R1 R2 1 R2
3
L()/dB
()
180
如下图系统开环伯德图:
c
G(s)
G(s)/k1
=0
4
其中G(s)是根据给定的稳态误差指标设计的,但此时的
相角裕度 =0,系统处于稳定边界上,不能正常工作。
如把G(s)所对应的系统称为未校正系统,虽然可以通过
减小未校正系统的开环放大系数使相角裕度增加,如
特性曲线G(s )/k1所示,但稳态误差也要随之增加,所 以开环放大系数是不能减小的。而改变未校正系统的
j
Gc
(s)
1 aTs 1 Ts
(1)零极点分布图:
1/T 1/aT 0
∵a 1 ∴零点总是位于极点之右,二者的距离由常
数a决定。零点的作用大于极点,故为超前网络。
14
(2)对数频率特性曲线:
L()/dB
20dB/dec
0
1
aT
()
0
1 T
m
1 aTs Gc (s) 1 Ts
20lga
m
G2(s)
G2(s)
9
在控制系统设计中,常用的校正方式为串联校正 和反馈校正两种。究竟选用哪种校正方式,取决于系 统中的信号性质、技术实现的方便性、可供选用的元 件、抗扰性要求、经济性要求、环境使用条件以及设 计者的经验等因素。
串联校正:装置简单,调整灵活,成本低。 反馈校正:其输入信号直接取自输出信号,校正 装置费用高,调整不方便,但是可以获得高灵敏度与 高稳定度。
6.1.2 校正方式 常用的校正方式有串联校正、反馈校正、前馈校
正和复合校正四种。 串联校正装置一般接在系统误差测量点之后和放大
器之前,串接于系统前向通道之中;反馈校正装置接 在系统局部反馈通道之中。
串联 校正
控制
对
器
象
反馈校正
6
前馈校正或顺馈校正,是在系统主反馈回路之外 采用的校正方式。这种校正方式的作用相当于对给定 值信号进行整形或滤波后,再送入系统;另一种前馈 校正装置接在系统可测扰动作用点与误差测量点之间, 对扰动信号进行直接或间接测量,并经变换后接入系 统,形成一条附加的对扰动影响进行补偿的通道。
其它参数都是比较困难的。这样就得在原系统的基础
上采取另外一些措施,即对系统加以“校正”。
所谓的“校正”,就是在原系统中加入一些参数
可以根据需要而改变的机构或装置,使系统整个特性
发生变化,从而满足给定的各项性能指标。这一附加
的装置称为校正装置。
5
加入校正装置后使未校正系统的缺陷得到补偿,这 就是校正的作用。