实验六、锅炉内胆水温PID整定实验(动态)
实验六、锅炉内胆水温PID整定实验(动态)
2.1.2 内胆水温的PID整定实验六锅炉内胆水温PID整定实验(动态)一、实验目的(1)了解单回路温度控制系统的组成与工作原理。
(2)研究P、PI、PD和PID四种调节器分别对温度系统的控制作用。
(3)改变P、PI、PD和PID的相关参数,观察它们对系统性能的影响。
二、实验设备CS2000型过程控制实验装置, PC机, DCS控制系统,DCS监控软件。
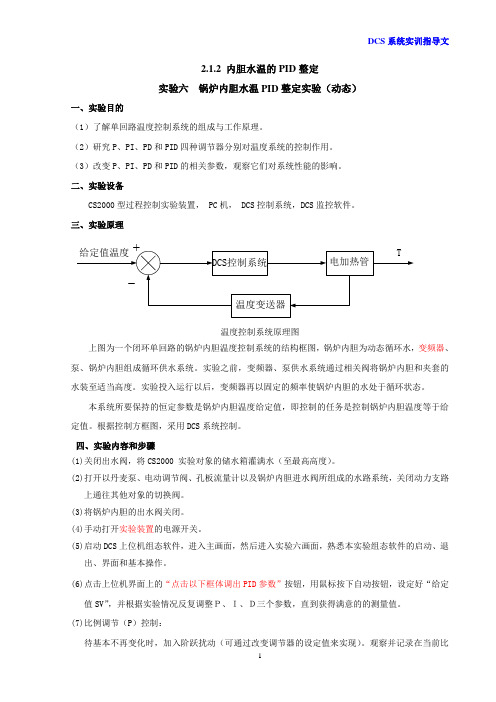
三、实验原理温度控制系统原理图上图为一个闭环单回路的锅炉内胆温度控制系统的结构框图,锅炉内胆为动态循环水,变频器、泵、锅炉内胆组成循环供水系统。
实验之前,变频器、泵供水系统通过相关阀将锅炉内胆和夹套的水装至适当高度。
实验投入运行以后,变频器再以固定的频率使锅炉内胆的水处于循环状态。
本系统所要保持的恒定参数是锅炉内胆温度给定值,即控制的任务是控制锅炉内胆温度等于给定值。
根据控制方框图,采用DCS系统控制。
四、实验内容和步骤(1)关闭出水阀,将CS2000 实验对象的储水箱灌满水(至最高高度)。
(2)打开以丹麦泵、电动调节阀、孔板流量计以及锅炉内胆进水阀所组成的水路系统,关闭动力支路上通往其他对象的切换阀。
(3)将锅炉内胆的出水阀关闭。
(4)手动打开实验装置的电源开关。
(5)启动DCS上位机组态软件,进入主画面,然后进入实验六画面,熟悉本实验组态软件的启动、退出、界面和基本操作。
(6)点击上位机界面上的“点击以下框体调出PID参数”按钮,用鼠标按下自动按钮,设定好“给定值SV”,并根据实验情况反复调整P、I、D三个参数,直到获得满意的的测量值。
(7)比例调节(P)控制:待基本不再变化时,加入阶跃扰动(可通过改变调节器的设定值来实现)。
观察并记录在当前比例P时的偏差DV(“余差”)。
每当改变值P后,再加同样大小的阶跃信号,比较不同P时的DV,并把数据填入表一中。
表一不同比例P时的余差记录实验过程中的各项数据,并绘成过渡过程曲线。
(数据可在软件上获得。
)(8)比例积分调节(PI)控制:a、在比例调节器控制实验的基础上,待被调量平稳后,加入积分(I)作用,观察被控制量能否回到原设定值的位置,以验证系统在PI调节器控制下没有余差。
热水锅炉温度控制的模糊PID参数自整定方法

热水锅炉温度控制的模糊PID参数自整定方法热水锅炉温度控制的模糊PID参数自整定方法热水锅炉温度控制的模糊PID参数自整定方法张秀滢刘强(中煤邯郸设计工程有限责任公司)摘要:针对热水锅炉温度控制中PlD参数人工整定的困难和参数自整定的必要性,对Fuzzy―PID参数自整定原理和方法进行了讨论,并对燃煤热水锅炉供暖系统进行了试运行,表明其正确、有效和实用性。
关键词:锅炉温度控制模糊PID参数自整定k.为.K『厂一模糊比例、积分、微分系数比例系数K,=K;+胆,E吼(2)积分系数K,=K,+胆,Eqi(3)微分系数K庐K升陋,Ead(4)0引言PID算法由于其结构简单、鲁棒性好和可靠性高的特点,成为迄今为止应用最广泛的控制算法。
然而在热水锅炉的温度控制中,由于被控对象具有非线性、时变、大滞后等特点,且热水锅炉温度控制受环境温度和燃料等诸多因素影响,导致难以建立精确的数学模型,难以确定最佳的控制器参数。
此时,传统的PID控制对进一步提高控制对象的质量遇到了极大的困难,难以获得良好的效果。
为了克服常规PID调节器的不足,提高其性能,人们进行了进一步的研究。
模糊控制是智能控制理论的一个分支,近十年来正以它全新的控制方式在控制界受到了极大的重视并得到了迅速发展。
与传统的PID控制方式相比,它具有特别适合于那些难以建立精确数学模型、非线性和大滞后的过程等特点。
但是经过深入研究,也会发现基本模糊控制存在着其控制品质粗糙和精度不高等弊病。
因此,本文提出一种将模糊控制和PID控制相结合起来,通过模糊控制实现PID参数自整定的方法来调节锅炉出水温度。
这种Fuzzy―PID策略,模糊控制的采用不是代替PID控制,而是对传统控制方式的改进和扩展,它既保持了常规PID控制系统结构简单、使用方便、鲁棒性强、控制精度高的优点,又采用模糊推理的方法实现了PID参数Kp、Ki、Kd的在线自整定,兼具了模糊控制灵活性、适应性强的特点,相比单纯的任一种控制效果都要好。
PID温度控制实验
PID 温度控制实验PID(ProportionalIntegralDerivative)控制是最早发展起来的控制策略之一,它根据系统的误差,利用比例、积分、微分计算出控制量对系统进行控制。
当我们不彻底了解一个系统和被控对象,或者不能通过有效的测量手段来获得系统参数时,最适合用 PID 控制技术。
由于其算法简单、鲁棒性好和可靠性高,被广泛应用于工业过程控制。
PID 调节控制是一个传统控制方法,它合用于温度、压力、流量、液位等几乎所有现场,不同的现场,仅仅是 PID 参数应设置不同,只要参数设置得当均可以达到很好的效果。
本实验以 PID 温度控制为例,通过此实验可以加深对检测技术、自动控制技术、过程控制等专业知识的理解。
2、掌握正校实验的方法,并用正交实验法来确定最佳 P、I、D 参数3、会求根据温度变化曲线求出相应的超调量、稳态误差和调节时间的方法二、仪器与用具加热装置、加热控制模块、单片机控制及显示模块、配套软件、电脑。
三、实验原理1、数字 PID 控制原理数字 PID 算法是用差分方程近似实现的,用微分方程表示的 PID 调节规律的理想算式为:1de(t)u(t)KP[e(t)e(t)dtTD] (1)TI0dt 单片机只能处理数字信号,上式可等价于:tTUnKP[enTIeii0nTD(enen1)] (2) TTTenD(en2en1en2)] (3) TIT (2) 式为位置式 PID 算法公式。
也可把(2)式写成增量式 PID 算法形式: UnUnUn1KP[enen1 其中,en 为第 n 次采样的偏差量; en-1 为第 n-1 次采样的偏差量; T 为采样周期; TI 为积分时间;TD 为微分时间; KP 为比例系数。
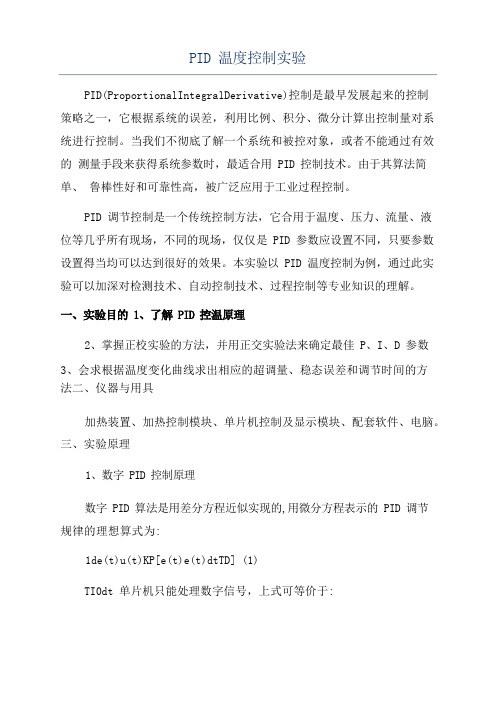
2、PID 温度控制的框图设定温度(SV)温度偏差(EV)(EV=SV-PV)PID 调节器按周期调节脉冲宽度输出加热装置实际温度(PV)图 1PID 温度控制的框图温度 PID 控制是一个反馈调节的过程:比较实际温度(PV)和设定温度(SV)的偏差,偏差值经过 PID 调节器运算来获得控制信号,由该信号控制加热丝的加热时间,达到控制加热功率的目的,从而实现对系统的温度控制。
PID自动控制系统参数整定实验报告

T13. PID自动控制系统参数整定(化工仪表与自动化,指导教师:卢红梅)实验一:一阶单容上水箱对象特性测试实验实验二:上水箱液位PID整定实验一、实验目的1)、通过实验熟悉单回路反馈控制系统的组成和工作原理。
2)、分析分别用P、PI和PID调节时的过程图形曲线。
3)、定性地研究P、PI和PID调节器的参数对系统性能的影响。
4)、通过实验熟悉单回路反馈控制系统的组成和工作原理。
5)、分析分别用P、PI和PID调节时的过程图形曲线。
6)、定性地研究P、PI和PID调节器的参数对系统性能的影响。
二、实验设备THKJ100-1型过程控制实验装置配置:上位机软件、计算机、RS232-485转换器1只、串口线1根、实验连接线。
型参数为串联釜数N三、实验原理实验一原理:阶跃响应测试法是系统在开环运行条件下,待系统稳定后,通过控制器或其他操作器,手动改变对象的输入信号(阶跃信号)。
同时,记录对象的输出数据或阶跃响应曲线,然后根据已给定对象模型的结构形式,对实验数据进行处理,确定模型中各参数。
实验二原理:图13.1单回路上水箱液位控制系统图13.1为单回路上水箱液位控制系统,单回路调节系统一般指在一个调节对象上用一个调节器来保持一个参数的恒定,而调节器只接受一个测量信号,其输出也只控制一个执行机构。
本系统所要保持的恒定参数是液位的给定高度,即控制的任务是控制上水箱液位等于给定值所要求的高度。
根据控制框图,这是一个闭环反馈单回路液位控制,采用工业智能仪表控制。
当调节方案确定之后,接下来就是整定调节器的参数,一个单回路系统设计安装就绪之后,控制质量的好坏与控制器参数选择有着很大的关系。
合适的控制参数,可以带来满意的控制效果。
反之,控制器参数选择得不合适,则会使控制质量变坏,达不到预期效果。
因此,当一个单回路系统组成好以后,如何整定好控制器参数是一个很重要的实际问题。
一个控制系统设计好以后,系统的投运和参数整定是十分重要的工作。
任务一锅炉内胆温度二位式控制任务二锅炉内胆水温PID整.
(1)、打开以丹麦泵、变频器、涡轮流量计以及锅炉内胆、 夹套进水阀(阀22、阀11、阀18、阀15)所组成的水路 系统,关闭通往其他对象的切换阀。 (2)、先把锅炉内胆和夹套的水装至适当高度,然后关闭 阀18。 (3)、将锅炉内胆的进水阀:阀11至适当开度。 (4)、将锅炉内胆的出水阀:阀14关闭。 (5)、将锅炉内胆的溢流口出水阀: 阀15全开。 (6)、检查电源开关是否关闭。
八、课后作业布置
试述串级控制系统为什么对主扰动具有很强的抗扰动能 力?如果副对象的时间常数不是远小于主对象的时间常数 时,这时副回路抗扰动的优越性还具有吗?为什么? 串级控制系统投运前需要做好那些准备工作? 主、副调 节器的内、外给定如何确定?正、反作用如何设置? 改变副调节器比例放大倍数的大小,对串级控制系统的 抗扰动能力有什么影响?试从理论上给予说明。
任务四 锅炉夹套和内胆温度串级控制 正确设置PID调节器: 副调节器:比例积分(PI)控制,反作用,自动,KC2 (副回路的开环增益)较大。 主调节器:比例积分(PI)控制,反作用,自动,KC1 〈 KC2(其中KC1为主回路开环增益)。 待系统稳定后,类同于单回路控制系统那样,对系统加 扰动信号,扰动的大小与单回路时相同。 通过反复对副调节器和主调节器参数的调节,使系统具 有较满意的动态响应和较高的控制精度。 (注):可参照前已做过的实验,详细列出本次实验的实 验方法与步骤。
能力目标 :1.能够正确操作温度控制系统。 2.能够对串级控制进行PID参数整定。
知识目标 :1.PID参数整定方法。 2.响应曲线分析。 3.串级控制系统分析。
素质目标 :培养自主学习能力,挖掘潜在创造力,激发设计才 能,培养团队意识、组织协调能力、创新思维能力,培养分析 和解决问题的能力。
锅炉内胆水温PID自动控制控制实验
第五节锅炉内胆水温PID 控制实验一、实验目的1.根据实验数据和曲线 ,分析系统在阶跃扰动作用下的动、静态性能。
2.比较不同 PID 参数对系统的性能产生的影响。
3.分析 P、 PI、PD、 PID 四种控制规律对本实验系统的作用。
二、实验设备1.THJ-2 型高级过程控制系统实验装置2.计算机及相关软件3.万用电表一只三、实验原理本实验以锅炉内胆作为被控对象,内胆的水温为系统的被控制量。
本实验要求锅炉内胆的水温稳定至给定量,将铂电阻 TT1 检测到的锅炉内胆温度信号作为反馈信号,在与给定量比较后的差值通过调节器控制三相调压模块的输出电压(即三相电加热管的端电压),以达到控制锅炉内胆水温的目的。
在锅炉内胆水温的定值控制系统中,其参数的整定方法与其它单回路控制系统一样,但由于加热过程容量时延较大,所以其控制过渡时间也较长,系统的调节器可选择 PD 或 PID 控制。
本实验系统结构图和方框图如图 5-1 所示。
估)(bJ图5-1 锅炉内胆温度特性测试系统(a)结构图(b)方框图可以采用两种方案对锅炉内胆的水温进行控制:(一)锅炉夹套不加冷却水(静态)(二)锅炉夹套加冷却水(动态)显然,两种方案的控制效果是不一样的,后者比前者的升温过程稍慢,降温过程稍快。
无论操作者采用静态控制或者动态控制,本实验的上位监控界面操作都是一样的。
四、实验内容与步骤1.先将储水箱贮足水量,将阀门 F1-1、F1-4、F1-5、F1-13全开,打开电磁阀开关,其余阀门关闭,启动380伏交流磁力泵,给锅炉内胆贮存一定的水量(要求至少高于液位指示玻璃管的红线位置),然后关闭阀F1-13、F1-4及电磁阀,打开阀F1-12,为给锅炉夹套供冷水做好准备。
2.接通控制系统电源,打开用作上位监控的的 PC机,进入的实验主界面,在实验主界面中选择本实验项即“锅炉内胆水温 PID控制实验”。
3.合上三相电源空气开关,三相电加热管通电加热,适当增加减少输出量,使锅炉内胆的水温稳定于设定值。
锅炉内胆水温定值控制系统的设计与实现

锅炉内胆水温定值控制系统的设计与实现学校代码学号题目学年论文指导教师评阅意见摘要本实验系统为对锅炉内胆水温的定值控制,利用THSA-1型过控综合自动化控制系统实验平台进行试验,在局域网中,通过上位机赋予下位机的权限,利用组态王软件对锅炉内胆水温进行设定,使用PID控制能在一定的精度内实现锅炉夹套对水锅炉内胆水温的自动调节,使之达到水温设定值,并保持稳定。
通过实验要求,我们采用主调节器为PID控制的系统,并使用MATLAB进行模型建立,使用试凑法得到PID参数。
因为用锅炉夹套内水的流动降低锅炉内胆的温度,所以锅炉水温具有非线性、时变性、大滞后和不对称性等特点,因此我们使用PID算法控制实现对锅炉内胆水温的快速精确控制,满足实验要求。
关键词:锅炉,水温,控制The boiler tank water temperature constant value control system design and implementationAbstractThis experiment system is a constant value control of the boiler tank water temperature, using THSA - 1 type control integrated automation control system experimental platform to test and in thelocal area network (LAN), given by the upper machine under a machine permissions, using kingview software to set the boiler tank water temperature, using PID control can realize the jacketed boiler within a certain precision of the boiler water tank water temperature automatic adjustment, the water temperature will be set value, and keep the stability. Requirements through the experiment, we use the primary controller for the PID control system, and use of MATLAB model is established in this paper, using the trial and error method of PID parameter. Because in jacketed boiler water flow to reduce the temperature of the boiler tank, so the boiler water temperature is nonlinear, time-varying, big lag and asymmetry and other characteristics, so we use PID algorithm control realize the rapid and accurate control of the boiler tank water temperature, satisfies the requirement of experiment.Key words : boiler,water temperature,control目录1.绪论............................................................. (1)1.1锅炉相关背景介绍............................................................. .. (1)1.2系统设计方案............................................................. .. (2)1.2.1设计目的............................................................. . (2)1.2.2设计要求............................................................. . (2)1.2.3设计思路............................................................. . (3)2.系统硬件组成及设计方案............................................................. (4)2.1智能仪表............................................................. (4)2.2控制器............................................................. . (4)2.3测量变送器............................................................. .. (5)2.4设计方案............................................................. (6)3系统仿真与分析............................................................. .. (7)3.1 matlab仿真结构图............................................................. (7)3.2系统的参数整定............................................................. (8)4系统的硬件调试及分析............................................................. .. (9)4.1组态王参数设定与工作过程分析............................................................. .. (9)4.2实验结果分析 ............................................................ (10)4.3试验中遇到的问题............................................................. (11)总结............................................................. ............................................................... .. 12致谢............................................................. .. (13)参考文献............................................................. (14)1.绪论1.1锅炉相关背景介绍锅炉是一种能量转换设备,向锅炉输入的能量有燃料中的化学能、电能,锅炉输出具有一定热能的蒸汽、高温水或有机热载体。
锅炉内胆静态水温PID控制(过控课设)

目录1 绪论 (1)1.1 锅炉 (1)1.2 现场总线 (1)1.3 WINCC概述 (2)2 锅炉内胆水温控制系统的设计 (3)2.1 控制系统介绍 (3)2.1.1 控制系统结构 (3)2.1.2 控制系统流程 (3)2.2 硬件设计 (4)2.2.1 实物接线图 (4)2.2.2 硬件配置 (6)3 控制系统的软件设计 (8)3.1 可编程控制器基础 (8)3.1.1 可编程控制器的产生和应用 (8)3.1.2 可编程控制器的组成和工作原理 (8)3.2 PLC控制柜的组成 (9)3.3 PLC的硬件组态控制程序设计 (10)3.4 PLC的控制程序设计 (12)3.4.1 FB41简介 (12)3.4.2 FC105简介 (14)3.4.3 FC106简介 (15)3.4.4 程序设计 (16)4 系统调试 (20)4.1 电源连接 (20)4.2 测试步骤 (20)5 实验结果显示 (23)结束语 (25)参考文献 (26)1 绪论1.1 锅炉锅炉是化工、供热供暖、炼油、发电等生产中不可或缺的设备。
它所产生的高压蒸汽,既可以作为风机、压缩机、大型泵类的驱动动力源,又可以作为蒸馏、化学反应、干燥等过程的热源。
随着生产规模的扩大,生产设备的革新,作为动力设备和供热设备的锅炉,正在向着更大的容量、更高的系统参数、更高的效率等方面去发展。
因此为了确保安全,稳定生产,锅炉的控制系统就显得越发的重要。
电锅炉也称电加热锅炉、电热锅炉,顾名思义,它是以电力为能源并将其转化成为热能,然后经过锅炉的转换,向外输出具有一定热能的蒸汽、高温水或有机热载体的设备。
电锅炉主要由钢制的壳体、电脑控制系统、低压电气系统、电加热管、进出水管及检测仪表等组成。
电锅炉的加热方式有电磁感应加热方式和电阻(电加热管)加热方式两种。
电阻加热方式又分为不锈钢加热管和陶瓷加热管,电阻加热方式就是采用电阻式电热元件进行加热。
电锅炉的优点就是在结构上易于叠加和组合,控制更加灵活,维修更换更方便。
锅炉水温控制系统的PID调节
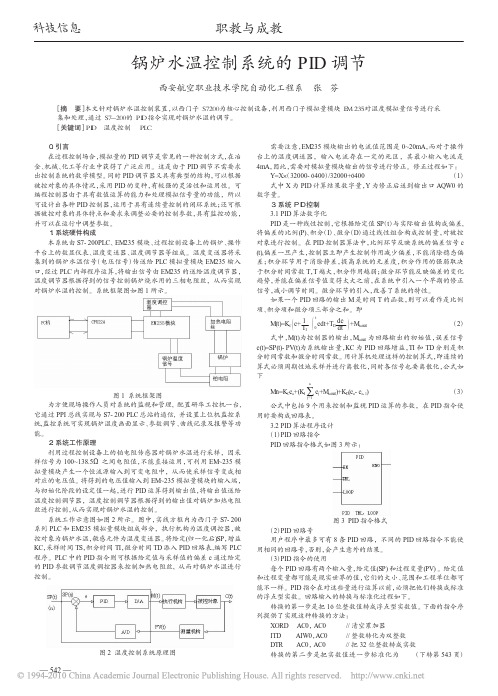
0.引言在过程控制场合,模拟量的PID调节是常见的一种控制方式,在冶金、机械、化工等行业中获得了广泛应用。
这是由于PID调节不需要求出控制系统的数学模型。
同时PID调节器又具有典型的结构,可以根据被控对象的具体情况,采用PID的变种,有较强的灵活性和运用性。
可编程控制器由于具有数值运算的能力和处理模拟信号量的功能,所以可设计出各种PID控制器,运用于具有连续量控制的闭环系统;还可根据被控对象的具体特点和要求来调整必要的控制参数,具有监控功能,并可以在运行中调整参数。
1.系统硬件构成本系统由S7-200PLC、EM235模块、过程控制设备上的锅炉、操作平台上的数显仪表、温度变送器、温度调节器等组成。
温度变送器将采集到的锅炉水温信号(电压信号)传送给PLC模拟量模块EM235输入口,经过PLC内部程序运算,将输出信号由EM235的送给温度调节器,温度调节器根据得到的信号控制锅炉烧水用的三相电阻丝,从而实现对锅炉水温的控制。
系统框架图如图1所示。
图1系统框架图为方便现场操作人员对系统的监视和管理,配置研华工控机一台,它通过PPI总线实现与S7-200PLC总站的通信,并设置上位机监控系统,监控系统可实现锅炉温度画面显示、参数调节、曲线记录及报警等功能。
2.系统工作原理利用过程控制设备上的铂电阻传感器对锅炉水温进行采样,因采样信号为100~138.5Ω之间电阻值,不能直接运用,可利用EM~235模拟量模块产生一个恒流源输入到可变电阻中,从而使采样信号变成相对应的电压值。
将得到的电压值输入到EM~235模拟量模块的输入端,与初始化阶段的设定值一起,进行PID运算得到输出值,将输出值送给温度控制调节器,温度控制调节器根据得到的输出值对锅炉加热电阻丝进行控制,从而实现对锅炉水温的控制。
系统工作示意图如图2所示。
图中,实线方框内为西门子S7-200系列PLC和EM235模拟量模块组成部分,执行机构为温度调控器,被控对象为锅炉水温,敏感元件为温度变送器。
锅炉内胆温度过控实训报告 2
湖南工程学院系统综合训练报告课题名称过程控制系统专业班级姓名学号指导教师2007年 4 月9 日一、概述过程控制一般是指连续生产过程的自动控制。
他是通过各种检测仪表、控制仪表(包括电动仪表和气动仪表,模拟仪表和智能仪表)和电子计算机(看作一台仪表)等自动化工具,对整个生产过程进行自动检测、自动监督和自动控制。
一个过程空话子系统是由被控制过程和过程检测控制仪表两部分组成的。
过程检测控制仪表包括检测元件、变送器、调节器(包括计算机)、调节阀。
过程控制系统的设计是根据工业过成的特性和工艺要求,通过选用过程检测控制仪表构成系统,再通过PID参数的整定,实现对生产过程的最佳控制。
在现代工业生产过程中,工业过程很复杂。
由于生产规模大小不同,工艺要求各异,产品品种多样,因此过程控制中的被控过程是多种多样的。
诸如石油化工过程中的精馏塔、化学反应器、流体传输设备;热工过程中的锅炉、热交换器;冶金过程中的转炉、平炉;机械工业中的热处理炉等。
他们的动态特性多数具有大惯性、大滞后、非线性特性。
有些机理复杂(如发酵、生化过程等)的过程至今尚未被人们认识,所以很难用目前过程辩识方法建立其精确的数学模型,因此设计能适应各种过程的控制系统并非易事。
由于被控过程具有大惯性、大滞后(大延时)等特性,因此决定了过程控制多属慢过程。
另外,在石油、化工、电力、冶金、轻工、建材、制药等工业生产过程中。
往往采用一些物理量和化学量(如温度、压力、流量、液位、成分、PH等)来表征其生产过程是否正常,因此需要对上述参数进行自动检测和自动控制,故过程控制多半为参数控制。
随着现在工业生产的迅速发展,工艺条件越来越复杂,对过程控制的要求越来越高。
过程控制系统的设计是以被控过程的特性为依据的。
由于工业过程的复杂、多变,因此其特性多半属多变量、分布参数、大惯性、大滞后和非线性等等。
为了满足上述特点与工艺要求,过程控制中的控制方案是十分丰富的。
通常有单变量控制系统,也有多变量控制系统;有仪表过程控制系统,也有计算机集散过程控制系统;有复杂控制系统,也有满足特定要求的控制系统。
锅炉内胆水温控制

目录1 系统组成介绍 (1)1.1 被控对象 (1)1.2 检测仪表 (1)1.3 执行机构 (2)1.5 控制屏组件 (2)1.6 实验控制系统流程图 (3)1.7 控制原理框图 (4)2 上位机组态与程序设计 (6)2.1 组态软件介绍 (6)2.2 WinCC的发展及应用 (6)2.3 Wincc监控组态与程序设计 (7)2.4 WiNCC组态软件的通讯 (14)3 PLC300控制程序 (16)4 实验内容与步骤 (20)4.1 实验准备工作 (20)4.2 控制规律选择参数调节 (21)5 实验结果显示 (23)总结 (26)参考文献 (27)1 系统组成介绍本实验装置对象主要由锅炉和盘管三大部分组成。
供水系统:一路由三相(380V 恒压供水)磁力驱动泵、电动调节阀、涡轮流量计及自动电磁阀组成;另一路由变频器、三相磁力驱动泵(220V变频调速)、涡轮流量计及自动电磁阀组成。
1.1 被控对象4.5KW三相电加热模拟锅炉(由不锈钢锅炉内胆加温筒和封闭式锅炉夹套构成)1.模拟锅炉:是利用电加热管加热的常压锅炉,包括加热层(锅炉内胆)和冷却层(锅炉夹套),均由不锈钢精制而成,可利用它进行温度实验。
做温度实验时,冷却层的循环水可以使加热层的热量快速散发,使加热层的温度快速下降。
冷却层和加热层都装有温度传感器检测其温度,可完成温度的定值控制、串级控制,前馈-反馈控制,解耦控制等实验。
2.盘管:模拟工业现场的管道输送和滞后环节,长37米(43圈),在盘管上有三个不同的温度检测点,它们的滞后时间常数不同,在实验过程中可根据不同的实验需要选择不同的温度检测点。
盘管的出水通过阀门的切换既可以流入锅炉内胆,也可以经过涡轮流量计流回储水箱。
它可用来完成温度的滞后和流量纯滞后控制实验。
3.管道及阀门:整个系统管道由敷塑不锈钢管连接而成,所有的阀门均采用优质阀,彻底避免了管道系统生锈的可能性。
有效提高了实验装置的使用年限。
优秀pid课程设计实例——几种PID整定方法在锅炉汽包水位系统中的应用和比较
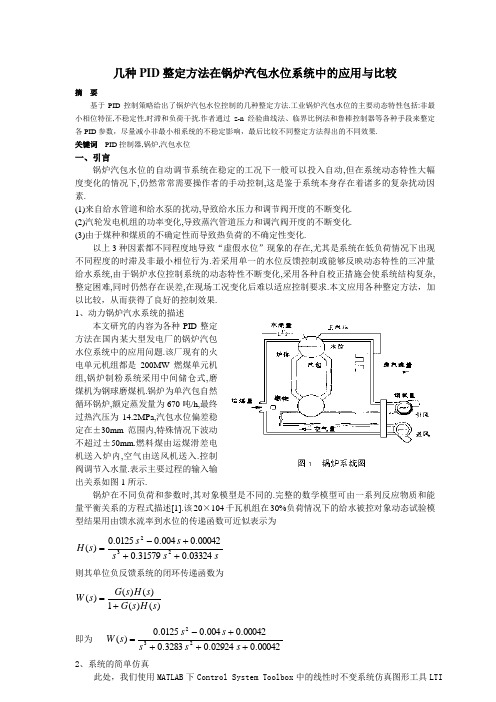
几种PID 整定方法在锅炉汽包水位系统中的应用与比较摘 要基于PID 控制策略给出了锅炉汽包水位控制的几种整定方法.工业锅炉汽包水位的主要动态特性包括:非最小相位特征,不稳定性,时滞和负荷干扰.作者通过z-n 经验曲线法、临界比例法和鲁棒控制器等各种手段来整定各PID 参数,尽量减小非最小相系统的不稳定影响,最后比较不同整定方法得出的不同效果. 关键词 PID 控制器,锅炉,汽包水位一、引言锅炉汽包水位的自动调节系统在稳定的工况下一般可以投入自动,但在系统动态特性大幅度变化的情况下,仍然常常需要操作者的手动控制,这是鉴于系统本身存在着诸多的复杂扰动因素.(1)来自给水管道和给水泵的扰动,导致给水压力和调节阀开度的不断变化. (2)汽轮发电机组的功率变化,导致蒸汽管道压力和调汽阀开度的不断变化. (3)由于煤种和煤质的不确定性而导致热负荷的不确定性变化.以上3种因素都不同程度地导致“虚假水位”现象的存在,尤其是系统在低负荷情况下出现不同程度的时滞及非最小相位行为.若采用单一的水位反馈控制或能够反映动态特性的三冲量给水系统,由于锅炉水位控制系统的动态特性不断变化,采用各种自校正措施会使系统结构复杂,整定困难,同时仍然存在误差,在现场工况变化后难以适应控制要求.本文应用各种整定方法,加以比较,从而获得了良好的控制效果. 1、动力锅炉汽水系统的描述本文研究的内容为各种PID 整定方法在国内某大型发电厂的锅炉汽包水位系统中的应用问题.该厂现有的火电单元机组都是200MW 燃煤单元机组,锅炉制粉系统采用中间储仓式,磨煤机为钢球磨煤机.锅炉为单汽包自然循环锅炉,额定蒸发量为670吨/h,最终过热汽压为14.2MPa,汽包水位偏差稳定在±30mm 范围内,特殊情况下波动不超过±50mm.燃料煤由运煤滑差电机送入炉内,空气由送风机送入.控制阀调节入水量.表示主要过程的输入输出关系如图1所示.锅炉在不同负荷和参数时,其对象模型是不同的.完整的数学模型可由一系列反应物质和能量平衡关系的方程式描述[1].该20×104千瓦机组在30%负荷情况下的给水被控对象动态试验模型结果用由馈水流率到水位的传递函数可近似表示为ss s s s s H 03324.031579.000042.0004.00125.0)(232+++-=则其单位负反馈系统的闭环传递函数为)()(1)()()(s H s G s H s G s W +=即为 00042.002924.03283.000042.0004.00125.0)(232++++-=s s s s s s W2、系统的简单仿真此处,我们使用MATLAB 下Control System Toolbox 中的线性时不变系统仿真图形工具LTIViewer ,来对闭环传递函数W(s)进行仿真。
锅炉内胆水温位式控制
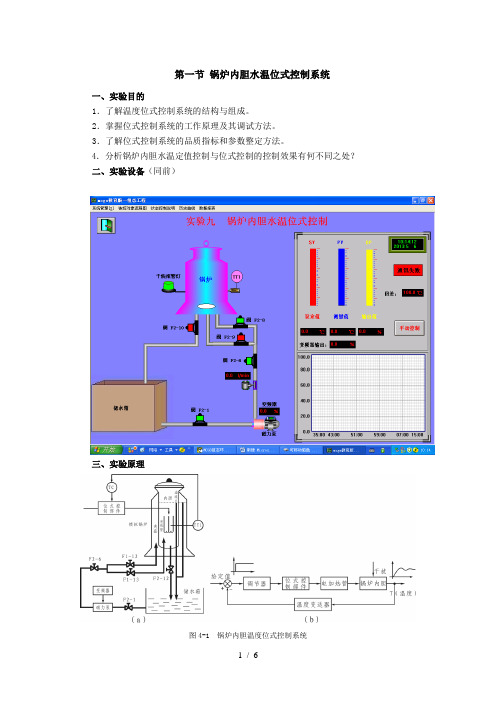
第一节锅炉内胆水温位式控制系统一、实验目的1.了解温度位式控制系统的结构与组成。
2.掌握位式控制系统的工作原理及其调试方法。
3.了解位式控制系统的品质指标和参数整定方法。
4.分析锅炉内胆水温定值控制与位式控制的控制效果有何不同之处?二、实验设备(同前)三、实验原理图4-1 锅炉内胆温度位式控制系统(a)结构图 (b)方框图本实验系统的结构图和方框图如图4-1所示。
本实验的被控对象为锅炉内胆,系统的被控制量为内胆的水温。
由于实验中用到的调节器输出只有“开”或“关”两种极限的工作状态,故称这种控制器为二位式调节器。
温度变送器把铂电阻TT1检测到的锅炉内胆温度信号转变为反馈电压V i。
它与二位调节器设定的上限输入V max和下限输入V min比较,从而决定二位调节器输出继电器是闭合或断开,即控制位式接触器的接通与断开。
图4-2为位式控制器的工作原理图。
图4-2 位式控制器的输入-输出特性图中: V0------位式控制器的输出;V i------位式控制器的输入;V max-----位式控制器的上限输入;V min-----位式控制器的下限输入。
由图4-2可见,当被控制的锅炉水温T减小到小于设定下限值时,即V i≤V min时,位式调节器的继电器闭合,交流接触器接通,使电热管接通三相380V电源进行加热(如图4-1所示)。
随着水温T的升高,Vi也不断增大,当增大到大于设定上限值时,即V i≥V max时,则位式调节器的继电器断电,交流接触器随之断开,切断电热丝的供电。
由于这种控制方式是断续的二位式控制,故只适用于对控制质量要求不高的场合。
位式控制系统的输出是一个断续控整理用下的等幅振荡过程,因此不能用连续控整理用下的衰减振荡过程的温度品质指标来衡量,而用振幅和周期作为控制品质的指标。
一般要求振幅小,周期长。
然而对于同一个位式控制系统来说,若要振幅小,则周期必然短;若要周期长,则振幅必然大。
因此可通过合理选择中间区以使振幅保持在限定范围内,而又尽可能获得较长的周期。
过程控制系统课程设计7:锅炉内胆动态水温PID控制实验doc

摘要温度是工业生产过程中最常检测和控制的热工参数之一,本设计是以西门子S7-200PLC为主控制器,以WINCC为上位机监控软件来实现对锅炉内胆水温的DCS自动控制。
系统主要由一台带有WINCC组态软件的上位机和应用于STEP7-MicroWIN V4.0软件、西门子S7-200PLC下位机以及PC/PPI电缆、RTGK-2型过程控制系统构成。
通过对下位机S7200PLC的软件编程,完成锅炉内胆温度信号采集、处理以及PID控制,分别对上位机以及下位机进行了详细设计,并运用工程整定方法,整定出满足系统要求的锅炉内胆水温PID控制参数,得到比较理想的PID控制曲线,实现了对锅炉内胆水温控制的目的,达到了设计要求。
关键词:锅炉内胆;水温;PID;S7200目录1系统总体方案分析 (1)1.1锅炉内胆动态水温PID控制系统总体方案分析 (1)1.2上位机组态与程序设计 (2)2系统调试 (13)2.1流程图绘制 (13)2.2电源连接 (14)2.3测试步骤 (14)3参数整定与系统分析 (17)3.1锅炉内胆水温定值控制实验的结构框图 (17)3.2调节器相关参数整定过程 (17)3.3系统在阶跃扰动作用下的静、动态性能 (20)3.4不同PID参数对系统的性能产生的影响。
(22)3.5 P、PI、PID控制方式的控制效果 (26)4结论 (30)参考文献 (32)1系统总体方案分析1.1锅炉内胆动态水温PID控制系统总体方案分析锅炉内胆水为动态循环水,变频器、磁力泵与锅炉内胆组成循环水系统。
如图1所示:图1.1锅炉内胆温度特性测试系统(a)结构图(b)方框图本实验系统组态软件进行,由于自动控制的时候考虑到机械及机器会出现故障,设置的调节阀可在及其出现故障时,非自动的情况下,手动进行调节开度,是锅炉内胆保持给定值,运用在大型生产过程中采用手动和自动模式替换操作达到整个生产的能耗最低,效益最大化。
被控变量为锅炉内胆水温,要求锅炉内胆水温等于给定值。
热水锅炉温度控制的模糊PID参数自整定方法

热水锅炉温度控制的模糊PID参数自整定方法作者:张秀滢刘强来源:《中小企业管理与科技·下旬》2010年第09期摘要:针对热水锅炉温度控制中PID参数人工整定的困难和参数自整定的必要性,对Fuzzy-PID参数自整定原理和方法进行了讨论,并对燃煤热水锅炉供暖系统进行了试运行,表明其正确、有效和实用性。
关键词:锅炉温度控制模糊PID 参数自整定0 引言PID算法由于其结构简单、鲁棒性好和可靠性高的特点,成为迄今为止应用最广泛的控制算法。
然而在热水锅炉的温度控制中,由于被控对象具有非线性、时变、大滞后等特点,且热水锅炉温度控制受环境温度和燃料等诸多因素影响,导致难以建立精确的数学模型,难以确定最佳的控制器参数。
此时,传统的PID控制对进一步提高控制对象的质量遇到了极大的困难,难以获得良好的效果。
为了克服常规PID调节器的不足,提高其性能,人们进行了进一步的研究。
模糊控制是智能控制理论的一个分支,近十年来正以它全新的控制方式在控制界受到了极大的重视并得到了迅速发展。
与传统的PID控制方式相比,它具有特别适合于那些难以建立精确数学模型、非线性和大滞后的过程等特点。
但是经过深入研究,也会发现基本模糊控制存在着其控制品质粗糙和精度不高等弊病。
因此,本文提出一种将模糊控制和PID控制相结合起来,通过模糊控制实现PID参数自整定的方法来调节锅炉出水温度。
这种Fuzzy-PID策略,模糊控制的采用不是代替PID控制,而是对传统控制方式的改进和扩展,它既保持了常规PID控制系统结构简单、使用方便、鲁棒性强、控制精度高的优点,又采用模糊推理的方法实现了PID参数Kp、Ki、Kd的在线自整定,兼具了模糊控制灵活性、适应性强的特点,相比单纯的任一种控制效果都要好。
本文设计一个参数自整定模糊PID控制器来完成对热水锅炉的温度控制,并在MATLAB/SIMULINK环境下对其进行仿真研究。
1 模糊自整定PID控制器设计1.1 模糊PID控制器结构模糊自整定PID算法的实质是找出PID三个参数与e和ec之间的模糊关系,在运行中通过不断检测e和ec,根据模糊控制原理来对三个参数进行在线修改,三个参数进行自整定的基本思想是:依据被控对象的响应在采样时刻的误差及误差的变化趋势这两个因素来确定参数调整量的极性和大小,本质上同时兼顾了被控对象响应的“静态性能”(是高于还是低于给定值)和响应的“动态性能”两个因素,既看现状,也看动向。
毕业设计实验锅炉炉温自校正PID控制系统设计
毕业设计(论文)题目:实验锅炉炉温自校正PID控制系统设计实验锅炉炉温自校正PID 控制系统设计I摘 要本文以递推最小二乘法为自适应规律, 研究实验锅炉温度控制, 用MATLAB 语言编程并进行系统仿真, 在仿真结果的基础上进行分析研究. 结果表明当采用自校正PID 算法时, 系统有自适应能力, 能根据被调节系统自动调节K P 、K I 、K D 参数使系统达到稳定, 解决了长期以来大时滞实验锅炉系统PID 参数设定难的问题. 为了使系统更精确, 本文采用了“带遗忘因子的递推最小二乘法”估计算法.关键字: 自校正PID; 炉温控制; 参数估计; 最小二乘法实验锅炉炉温自校正PID控制系统设计ABSTRACTThis paper adopts recursive least square method to research how to control the experimental boiler temperature and uses MATLAB to program and simulate. The further research and analysis are made on the basis of system simulation results, The results show that when adopting the self-revised PID controller, the system can adapt the complex working conditions and the controller can select the PID parameters automatically. Morever, it has solved the difficult problem of setting large delay experimental boiler system PID parameters. In order to make the system more accurate, this paper adopts the estimation algorithm of recursive least-square method with forgetting factor.Keywords:Self-revised PID Controller; Temperature Control; Recursive Least Square Method; Parameter EstimationII实验锅炉炉温自校正PID控制系统设计目录摘要 (I)ABSTRACT (II)1 绪论 (1)1.1选题背景及意义 (1)1.2论文的主要内容 (1)1.3本人主要工作 (1)2常规PID控制算法及其改进算法 (2)2.1常规PID控制原理 (2)2.1.1常规PID调节器算法 (2)2.1.2常规PID调节器的参数整定 (3)2.1.3常规PID调节器在实际应用中的局限 (3)2.2数字PI D控制 (3)2.2.1位置式PID控制算法 (4)2.2.2增量式PID控制算法 (5)2.2.3数字PID控制器的参数整定方法 (5)2.2.4采样周期的选择 (6)3 自校正PID控制算法 (7)3.1自适应控制系统原理 (7)3.1.1概述 (7)3.1.2模型参考自适应控制 (8)3.1.3自校正控制 (8)3.2自校正控制系统 (9)3.3.1递推最小二乘估计 (10)3.3.2带遗忘因子的递推最小二乘算法的递推算式 (12)3.3.3初值的确定 (13)3.4本论文所用自校正PID控制算法 (13)3.4.1具体框图和原理 (13)3.4.3带遗忘因子的递推最小二乘法 (17)4 系统硬件的结构设计 (18)4.1系统硬件的结构 (18)4.2自校正PID实验锅炉控制系统原理 (18)4.3自校正控制算法设计 (20)III实验锅炉炉温自校正PID控制系统设计4.4自校正PID算法设计流程图 (21)5 MATLAB 仿真及结果分析 (22)6 结论 (26)参考文献 (27)致谢........................................................................................................错误!未定义书签。
锅炉内胆温度过控实训报告 2
湖南工程学院系统综合训练报告课题名称过程控制系统专业班级姓名学号指导教师2007年 4 月9 日一、概述过程控制一般是指连续生产过程的自动控制。
他是通过各种检测仪表、控制仪表(包括电动仪表和气动仪表,模拟仪表和智能仪表)和电子计算机(看作一台仪表)等自动化工具,对整个生产过程进行自动检测、自动监督和自动控制。
一个过程空话子系统是由被控制过程和过程检测控制仪表两部分组成的。
过程检测控制仪表包括检测元件、变送器、调节器(包括计算机)、调节阀。
过程控制系统的设计是根据工业过成的特性和工艺要求,通过选用过程检测控制仪表构成系统,再通过PID参数的整定,实现对生产过程的最佳控制。
在现代工业生产过程中,工业过程很复杂。
由于生产规模大小不同,工艺要求各异,产品品种多样,因此过程控制中的被控过程是多种多样的。
诸如石油化工过程中的精馏塔、化学反应器、流体传输设备;热工过程中的锅炉、热交换器;冶金过程中的转炉、平炉;机械工业中的热处理炉等。
他们的动态特性多数具有大惯性、大滞后、非线性特性。
有些机理复杂(如发酵、生化过程等)的过程至今尚未被人们认识,所以很难用目前过程辩识方法建立其精确的数学模型,因此设计能适应各种过程的控制系统并非易事。
由于被控过程具有大惯性、大滞后(大延时)等特性,因此决定了过程控制多属慢过程。
另外,在石油、化工、电力、冶金、轻工、建材、制药等工业生产过程中。
往往采用一些物理量和化学量(如温度、压力、流量、液位、成分、PH 等)来表征其生产过程是否正常,因此需要对上述参数进行自动检测和自动控制,故过程控制多半为参数控制。
随着现在工业生产的迅速发展,工艺条件越来越复杂,对过程控制的要求越来越高。
过程控制系统的设计是以被控过程的特性为依据的。
由于工业过程的复杂、多变,因此其特性多半属多变量、分布参数、大惯性、大滞后和非线性等等。
为了满足上述特点与工艺要求,过程控制中的控制方案是十分丰富的。
通常有单变量控制系统,也有多变量控制系统;有仪表过程控制系统,也有计算机集散过程控制系统;有复杂控制系统,也有满足特定要求的控制系统。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
实验六、锅炉内胆水温PID整定实验(动态)
一、实验目的
1)、了解单回路温度控制系统的组成与工作原理。
2)、研究P、PI、PD和PID四种调节器分别对温度系统的控制作用。
3)、改变P、PI、PD和PID的相关参数,观察它们对系统性能的影响。
二、实验设备
CS2000型过程控制实验装置, PC机,DCS监控软件,DCS控制系统。
三、实验原理
图6-1、温度控制系统原理图
本系统所要保持的恒定参数是锅炉内胆温度给定值,即控制的任务是控制锅炉内胆温度等于给定值。
根据控制框图,采用DCS控制系统。
一、实验内容与步骤
1)、开通以水泵、电动调节阀、孔板流量计以及锅炉内胆进水阀所组成的水路系统,关闭通往其他对象的切换阀。
2)、将锅炉内胆的出水阀关闭。
3)、检查电源开关是否关闭。
4)、开启相关仪器和计算机软件,进入相应的实验六。
5)、点击上位机界面上的“点击以下框体调出PID参数”按钮,设定好给定值,并根据实验情况反复调整P、I、D三个参数,直到获得满意的测量值。
6)、比例调节(P)控制
待基本不再变化时,加入阶跃扰动(可通过改变调节器的设定值来实现)。
观察并记录在当前比例P时的余差和超调量。
每当改变值P后,再加同样大小的阶跃信号,比较不同P 时的ess和σp,并把数据填入表一中。
表一、不同比例P时的余差和超调量
记录实验过程各项数据绘成过渡过程曲线。
(数据可在软件上获得)
7)比例积分调节(PI)控制
(1)、在比例调节器控制实验的基础上,待被调量平稳后,加入积分(I)作用,观察被控制量能否回到原设定值的位置,以验证系统在PI调节器控制下没有余差。
(2)、固定比例P值,然后改变积分时间常数I值,观察加入扰动后被调量的动态曲线,并记录不同I值时的超调量σp。
表二、不同Ti值时的超调量σp
(3)、固定I于某一中间值,然后改变比例P的大小,观察加扰动后被调量的动态曲线,并记下相应的超调量σp。
表三、不同δ值时的超调量σp
(4)、选择合适的P和I值,使系统瞬态响应曲线为一条令人满意的曲线。
此曲线可通过改变设定值(如把设定值由50%增加到60%)来实现。
8)比例微分调节器(PD)控制
在比例调节器控制实验的基础上,待被调量平稳后,引入微分作用(D)。
固定比例P 值,改变微分时间常数D的大小,观察系统在阶跃输入作用下相应的动态响应曲线。
表四、不同D时的超调量和余差
9)比例积分微分(PID)调节器控制
(1)、在比例调节器控制实验的基础上,待被调量平稳后,引入积分(I)作用,使被调量回复到原设定值。
减小P,并同时增大I,观察加扰动信号后的被调量的动态曲线,验证
在PI 调节器作用下,系统的余差为零。
(2)、在PI 控制的基础上加上适量的微分作用“D ”,然后再对系统加扰动(扰动幅值与前面的实验相同),比较所得的动态曲线与用PI 控制时的不同处。
(3)、选择合适的P 、I 和D ,以获得一条较满意的动态曲线。
10)用临界比例度法整定PID 调节器的参数
在实际应用中,PID 调节器的参数常用下述实验的方法来确定,这种方法既简单又较实用,它的具体做法是:
图6-4、具有比例调节器的闭环系统
(1)、按图6-4所示接好实验系统,逐渐减小调节器的比例度(1/P ),直到系统的被调
量出现等幅振荡为止。
如果响应曲线发散,则表示比例度(1/P )调得过小,应适当增大之,使曲线出现等幅振荡为止。
(2)、图6-5为被调量作 等幅振荡时的曲线。
此时对 应的比例度(1/P )就是临界比例 ,
用δK 表示;相应的振荡 图6-5、具有周期TK 等幅振荡 周期就是临界振荡周期T K 。
据此按下表确定PID 调节器的参数。
表五、用临界比例度法整定调节器的参数
(3)、必须指出,表格中给出的参数仅是对调节器参数的一个初步整定。
使用上述参数的调节器很可能使系统在阶跃信号作用下,达不到4:1的衰减振荡。
因此若获得理想的动
态过程,应在此基础上,对表中给出的参数稍作调整,并记下此时的δ、Ti和Td。
五、实验报告要求。
1)、用临界比例度法整定三种调节器的参数,并分别作出系统在这三种调节器控制下的阶跃响应曲线。
2)、作出比例调节器控制时,不同P值时的阶跃响应曲线,得到的结论是什么?
3)、分析PI调节器控制时,不同P和I值对系统性能的影响?
4)、绘制用PD调节器控制时系统的动态波形。
5)、绘制用PID调节器控制时系统的动态波形。
六、思考题
1)、在阶跃扰动作用下,用PD调节器控制时,系统有没有余差存在?为什么?
2)、在温度控制系统中,为什么用PD和PID控制,系统的性能并不比用PI控制有明显地改善?
3)、连续温控与断续温控有何区别?为什么?。