车身控制系统-总线系统
汽车总线系统

汽车总线系统 具有实时性、 可靠性、可扩
展性等特点
汽车总线系统 可以降低汽车 电子系统的成 本提高汽车的 安全性和舒适
性。
汽车总线系统的应 用
控制汽车电子设备:通过总线系统控制汽车上的各种电子设备如发动机、变速箱、刹车 系统等。
数据传输:总线系统可以快速、准确地传输数据提高汽车电子设备的工作效率。
1980年代:CN总 线技术诞生用于 汽车电子控制系 统
1990年代:LIN 总线技术出现用 于汽车电子控制 系统的低成本解 决方案
2000年代: FlexRy总线技术 出现用于汽车电 子控制系统的高 速通信
2010年代:以太 网技术应用于汽 车电子控制系统 实现高速、实时、 可靠的通信
总线技术的发展: 从传统的CN总线到 更先进的FlexRy总 线
网络化:构建车 辆与车辆、车辆 与基础设施之间 的网络连接实现 信息共享和协同 控制
标准化:制定统 一的总线协议和 接口标准降低开 发成本和维护难 度
安全性:加强数 据加密和身份认 证确保车辆通信 和数据传输的安 全性
智能网ห้องสมุดไป่ตู้汽车:汽车总线系统将实现车 辆与车辆、车辆与基础设施、车辆与云 端的互联互通提高驾驶安全性和舒适性。
网络架构的发展: 从传统的分布式网 络架构到更先进的 集中式网络架构
安全性能的发展: 从传统的被动安全 到更先进的主动安 全
智能化的发展:从 传统的手动操作到 更先进的自动驾驶 技术
智能化:汽车总线系统将更加智能化实现车辆与外界的实时交互 安全性:汽车总线系统将更加注重安全性提高车辆的安全系数 节能环保:汽车总线系统将更加注重节能环保降低车辆的能耗和排放 集成化:汽车总线系统将更加集成化实现车辆各个系统的高效协同工作
车身电控系统的组成

车身电控系统的组成车身电控系统是现代汽车中不可或缺的一部分,它由多个组成部分组成,包括传感器、控制器、执行器等。
这些部件协同工作,以确保车辆的安全性、性能和舒适性。
本文将详细介绍车身电控系统的组成。
1. 传感器传感器是车身电控系统的重要组成部分,它们用于监测车辆的各种参数,例如车速、转向角度、油门位置、刹车压力、气囊状态等。
这些传感器将收集到的数据传输给控制器,以便控制器能够根据车辆的状态做出相应的决策。
2. 控制器控制器是车身电控系统的大脑,它接收传感器传来的数据,并根据预设的算法和逻辑进行计算和分析,最终控制车辆的各种功能。
例如,当传感器检测到车速过快时,控制器会自动减速以确保车辆的安全性。
3. 执行器执行器是车身电控系统的执行部分,它们根据控制器的指令执行相应的操作。
例如,当控制器决定要减速时,执行器会控制刹车系统减速。
执行器还包括发动机控制单元、变速器控制单元等,它们控制着发动机和变速器的工作状态,以确保车辆的性能和燃油经济性。
4. 通信总线通信总线是车身电控系统中的重要组成部分,它将传感器、控制器和执行器连接在一起,以便它们之间能够进行数据交换和通信。
通信总线还可以将车辆的数据传输到车载信息娱乐系统中,以便驾驶员能够了解车辆的状态和性能。
5. 电源系统电源系统是车身电控系统的能量来源,它提供电力给传感器、控制器和执行器等组件。
电源系统还包括电池、发电机和稳压器等部件,以确保车辆的电力供应稳定和可靠。
6. 诊断系统诊断系统是车身电控系统的监测和维护部分,它能够检测车辆的故障和问题,并提供相应的解决方案。
诊断系统还可以记录车辆的运行数据和故障码,以便技术人员进行故障排除和维修。
车身电控系统是现代汽车中不可或缺的一部分,它由多个组成部分组成,包括传感器、控制器、执行器、通信总线、电源系统和诊断系统等。
这些部件协同工作,以确保车辆的安全性、性能和舒适性。
随着汽车技术的不断发展,车身电控系统也将不断升级和改进,以满足人们对汽车的更高要求。
第2章 汽车总线概述
减少了装配步骤(比如:装配奥迪A6轿车时,方向盘模块减少
上一页 下一页 返回
2.1为什么要采用总线技术
5个,安装步骤减少2个)
5.增大开发余地 各控制器可以把整车功能相对随意地分担,新的功能和新技 术可以通过软件进行更新。
2. 1. 3总线技术的发展
1983年,丰田汽车公司在世纪牌汽车上最早采用了应用光 缆的车门控制系统,实现了多个节点的连接通信。 1986-1989年间,在车身系统上装配了铜线的网络。 GM公司的车灯控制系统已经处于批量生产的阶段。 1983年Robert Bosch公司开始开发汽车总线系统,德国 的Wolfhard Lawrenz教授给这种新总线命名为
上一页 下一页 返回
2.2总线系统信息传输及总体构成
位组成。因此,每秒钟所传输的字符数即字符速率,字符速 率和波特率是两种概Байду номын сангаас。 波特率和比特率的区别: ①波特率指信号每秒的变化次数;比特率指每秒可传输的二进 制位数。 ②在无调制的情况下,波特率精确等于比特率。采用调相技 术时,波特率不等于比特率。
上一页 下一页 返回
2.2总线系统信息传输及总体构成
(2)改变信息优先级 如车辆发生相撞事故,安全气囊控制单元会发出负加速度传 感器的信号,这个信号的优先级在动力系统总线中是非常高 的,但转到舒适系统车载网络后,网关调低了它的优先级, 因为它在舒适系统中其功能只是打开车门和灯。 (3)网关可作为诊断接口 根据车辆的不同,网关可能安装在组合仪表内、车上供电控 制单元内或在自己的网关控制单元内。由于通过CAN数据总 线的所有信息都供网关使用,所以网关也用作诊断接口。 网关相当于站台(Gateway ),见图2-7。 网关的主要任务是使两个速度不同系统之间能进行信息交换。
基于LIN总线的车身控制系统研究
Ab t a t I c ls o c ih r ef r n ec mmu iai nn t o l i uo b lsw t ei c e sn s g f lcr a sr c : t al r f mu h h g e r ma c o p o nc t ew r n a tmo i i t r a i gu a eo e t c l o ( e hh n e i c mp n n s L N i alw c s a de ir e eo me t ewok w ih h s b d p o p c f ea piai ni u o b ls o o e t. I - o t n a e v lp n t r , h c a  ̄a r s e t p l t a t mo i . s o s d n a ot h c o n e T i a e ic s e h r p ri sa d c mmu i ai n p o o o f I a d t e l sr t st e s l t n o o y c n r l h sp p rd s u s st e p o e t n o e n c to r tc l N, n h n i u t e h ou i f d - o t o L l a o b o
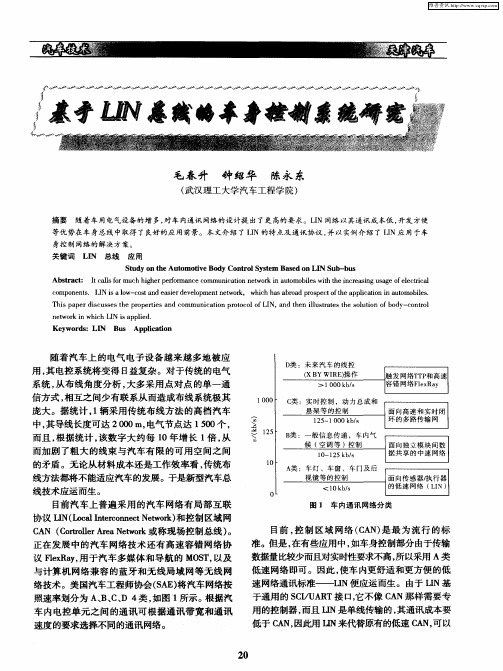
用的控制器 , 而且 LN是单线传输的 , I 其通讯成本要 低于 C N 因此用 LN来代替原有的低速 C N, A , I A 可以
维普资讯
降低系统成本并提高系统性能 。
1 L 总线综 述
信号可以在从节点之间传播 ,而不经过主节点 , 或 者主节点广播消息到 网络中的所有节点 , 帧头 的发 送时序和优先级别受主任务控制 。主节点可将信息 随时传送到从节点, 而从节点只在主节点询问时才 传送信息。 实际上, 从节点仅在需要发出唤醒信息的 时候才主动发送信息 。 数据通讯是 由帧头的格式形成和控制的 , 帧头 由主任务 向从任务传送 同步和标识符信息 , 并将一 个从任务的信息传送到所有的其它从任务。之后再 由主任务发送一字节 的信息标志符, 其中 0 3 - 位表 示信息类别 ,~ 位表示信息长度,. 位是奇偶校 45 7- - 8 验。 从任务通过该字节判断数据是否与 自己有关, 并
cav总线系统名词解释
CAV总线系统名词解释引言C A V(Co nn ec te da nd A ut on om ou sV eh icl e s)总线系统是一种用于连接智能汽车各个部件和系统的通信架构。
通过CA V总线系统,车辆内部的各个电子控制单元(E CU)可以相互通信,实现信息传输和功能协调。
本文将对CA V总线系统中常见的名词进行解释,以帮助读者更好地理解相关概念。
名词解释1.C A V总线系统C A V总线系统指的是用于智能汽车内部各个部件和系统之间进行通信和数据传输的一种架构。
它采用总线的结构,通过一根主线连接各个EC U,实现数据的交换和共享,为智能驾驶、车载娱乐、车身安全等功能提供支持。
2.E C UE C U(El ec tr on ic Co n tr ol Un it)是指智能汽车中的电子控制单元,它是车辆的大脑之一,负责监测、控制和调节车辆的各个系统。
例如发动机控制单元、制动控制单元、安全气囊控制单元等都属于E CU的范畴。
3.数据总线数据总线是C AV总线系统中的一部分,用于在不同E CU之间传输数据和信息。
它一般分为高速数据总线和低速数据总线两种类型。
高速数据总线主要用于传输速度要求较高的数据,例如视频信号和传感器数据等;低速数据总线主要用于传输控制信号和一些较低速率的数据。
4.控制器局域网(C A N)控制器局域网(C ont r ol le rA re aN et wor k,简称C AN)是一种应用于实时控制系统的串行总线通信协议,常用于汽车领域。
它具有高可靠性、实时性强、传输距离远等特点,适用于连接E CU进行实时数据交换和控制。
5.以太网以太网是一种广泛应用于计算机网络领域的局域网技术,也被用于智能汽车中的数据通信。
通过以太网,各个E CU可以以高带宽、低延迟的方式进行数据传输,支持复杂的车载应用和服务。
6.F l e x R a yF l ex Ra y是一种用于实时数据传输的串行总线标准,主要用于高带宽和实时性要求较高的系统。
六. K 总线 车身总线【 汽车总线系统原理与检修】

可以协调发送和接收装置之间的奇偶校验检查,但无需强 制执行。如果具有偶数奇偶性,校验位就会增加“1”的数 量使其变成偶数。如果某位已具有偶数奇偶性,发送装置 就会将校验位设为逻辑“0”。反之,如果某位具有奇数奇 偶性,发送装置就会将校验位设为逻辑“1”。因此,传输 时“1”的总数又变为偶数。接收装置对所接收字符的奇偶 性进行分析。如果奇偶性与协调结果不符,就会发出传输 错误的信号。
1 接收装置 2 起始位 3 最低值数位 4 5 - 8 位数据 5 最高值数位
6 检查位 7 停止位 8 停止位 9 信号:自由总线
首先发送一个起始位,接收装置可通过该起始位与发送装置 的节拍保持同步。随后根据所用代码发送 5 至 8 个数据位, 并可能发送一个检验位。最后还有两个停止位。这些停止位 用于传输两个字符之间的最小停顿。它们为接收装置创造了 接收下面字符的准备时间。 在最高值数据位和停止位之间还可插入一个用于确保数据传 输的校验位。该校验位负责对所传数据进行简单检查。奇偶 性为一个二进制数据值中逻辑 1 电平的数量。如果该数据值 的 1 位数量为偶数(0,2,4,....),则该数据值具有偶数 奇偶性,数量为奇数时(1,3,5,....)具有奇数奇偶性。
汽车总线系统的原理和故障诊断
K 总线/ 车身总线
1.K 总线及其控制单元。
2.K 总线 K 总线用于将普通车辆电气系统、信息和通信系统及安全系 统的组件联网。 其它具有通信功能并相互交换数据的控制单元也连接到 K 总线上。K 总线是一个双向单线接口。
3.数据传输 由于 K 总线只用一根单独的导线朝两个方向传输数据, 因 而采用半双工模式传输数据。因此每次只能进行发送或接收 。由于发送装置并不发送系统节拍, 因此以异步形式传输 数据。为此, 发送和接收装置都使用各自的时钟脉冲发生 器。通过所传输字符的 总线的电压电平 利用 K 总线传输信息时, 电压电平为 0 V 至12 V。电压电 平由低变高时为逻辑 1。由高变低为逻辑 0。
基于混合总线的车身控制系统设计
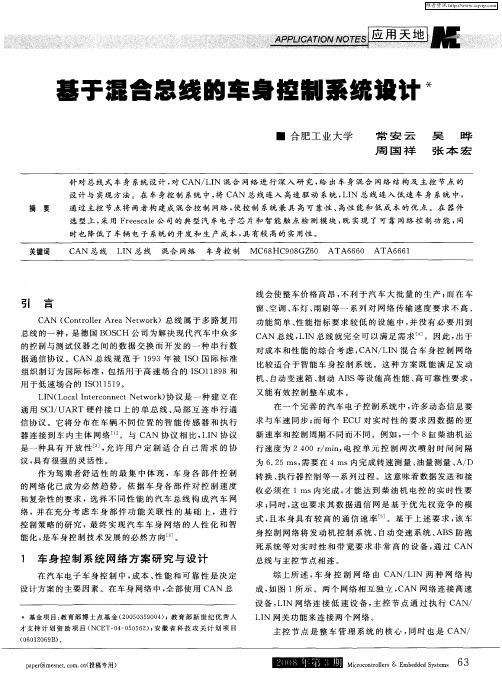
窗 、 调 、 灯 、 刷 等 一 系 列 对 网络 传 输 速 度 要 求 不 高 、 空 车 雨
功 能 简 单 、 能 指 标 要 求 较 低 的 设 施 中 , 没 有 必 要 用 到 性 并 C AN 总 线 , I L N总 线 就 完 全 可 以满 足 需 求 。 因 此 , 于 出 对 成 本 和 性 能 的综 合 考 虑 , CAN/ I 混 合 车 身 控 制 网 络 LN 比较 适 合 于智 能 车 身 控 制 系 统 。这 种 方 案 既 能 满 足 发 动 机、 自动 变 速 箱 、 动 AB 制 S等设 施 高 性 能 、 可靠 性 要 求 , 高
摘 要
通 过 主 控 节 点 将 两者 构 建 成 混 合 控 制 网络 , 控 制 系 统 兼 具 高 可 靠 性 、 使 高性 能 和 低 成 本 的优 点 。在 器件
选 型上 , 用 F e sae公 司 的 典 型 汽 车 电 子 芯 片 和 智 能 触 点 检 测 模 块 , 实 现 了 可 靠 网络 控 制 功 能 , 采 r ec l 既 同
又能有效控制整车成本 。
在 一 个 完 善 的汽 车 电子 控 制 系 统 中 , 多 动 态 信 息 要 许 求 与 车 速 同步 ; 每 个 E 而 CU 对 实 时 性 的 要 求 因 数 据 的 更 新 速 率 和 控 制 周 期 不 同而 不 同 。例 如 , 一个 8缸 柴 油 机 运 行 速 度 为 24 0 r ri , 控 单 元 控 制 两 次 喷 射 时 间 间 隔 0 / n 电 a 为 6 2 , 要 在 4ms内完 成 转 速 测 量 、 量 测量 、 D . 5ms 需 油 A/ 转 换 、 行 器 控 制 等 一 系 列 过 程 。这 意 味着 数据 发 送 和 接 执 收 必 须 在 1ms内完 成 , 能 达 到 柴 油 机 电 控 的 实 时 性 要 才
第1章 汽车总线系统基础知识

• 比特率是指每秒传输的比特(bit)数。单位为bit/s,也可表示为bps (bit per second),比特率越高,单位时间传送的数据量越大。计 算机中的信息都用二进制的0和1来表示,其中每个0或1被称为一个 位,即bit(位)。大写B表示Byte即字节,1个字节= 8个位,即 1B=8bit。表示文件大小的单位,一般都使用千字节(KB)来表示文 件的大小。
• 接着,美国汽车工程师协会提出了J1850。
上一页 下一页 返回
1.1 汽车总线系统概述
• 此后,日本也提出了各种各样的总线系统方案,并且丰田、日产、三 菱、本田及马自达公司都已经处于批量生产阶段,但没有统一为以车 身系统为主的控制方式。
• 而在其他国家,特别是欧洲的厂家则采用CAN,同时发表文章介绍 采用大型CAN网络的车型。由于他们在控制系统上都可以采用CAN ,从而充分地证明了CAN在此领域内的先进性。
• 1. 链路(传输媒体)
• 链路指网络信息输出的媒体,分为有线和无线两种类型,目前汽车上 使用的大多数都是有线网络,通常用于局域网的传输媒体有双绞线、 同轴电缆和光纤。
• 1986 年2 月,Robert Bosch 公司在美国汽车工程师协会(SAE) 汽车工程协会大会上介绍了一种新型的串行总线——CAN 控制器局 域网,那是汽车总线系统CAN 诞生的时刻。CAN 全称为Controller Area Network,即控制器局域网,是国际上应用最广泛的现场总线 之一。
• 如图1-4(a)所示,在传统控制电路中,各种控制信号都属于平行关 系,相互之间并没有关联,每个信号都有专属的信号线。因此,如果 需要传输多个信号,就需要多根线进行传输。而在总线系统中采取基 于串行数据总线体系结构,能将各种信号按照内部程序转换为各种数 据后,通过一条线或两条线将信号一个一个通过串行通信方式进行传 输,在其通信线上传送的是“0”和“1”数字信号,如图1-4(b)所 示。A电脑读取4个开关信号状态,将其转换为“0110”的数据传送给 B电脑,B电脑收到后将其解读,即知现在1、4开关断开,2、3开关 接通。
智能车辆的车身控制系统

案例四:智能公交车的安全与舒适性控制
总结词
通过对智能公交车的安全与舒适性控制系统的设计和 实现进行深入探讨,提出了一种基于传感器融合和数 据挖掘技术的智能公交车安全与舒适性控制系统方案 。
详细描述
该方案包括车辆运行状态监测系统、乘客行为监测系统 、安全预警系统、舒适性控制系统等模块。车辆运行状 态监测系统通过对车辆的运行状态进行实时监测,为安 全预警系统和舒适性控制系统提供数据支持;乘客行为 监测系统通过视频监控和数据分析,实现对乘客行为的 监测和预警;安全预警系统通过数据挖掘和机器学习等 技术,实现对车辆安全隐患的预警和报警;舒适性控制 系统则通过对车辆内部环境的调节和控制,提高乘客的 乘坐舒适度。
电动化程度更高
电池技术的进步
随着电池技术的不断进步,未来的智能车辆将具备更长的续航里 程和更快的充电速度。
电动驱动系统的发展
电动驱动系统的发展将提高智能车辆的动力性能和能效。
智能化能源管理
通过智能化能源管理,实现电池荷电状态预测、充电策略优化等 功能,提高能源利用效率。
共享化程度更高
自动驾驶出租车
06
析
案例一:自动驾驶汽车的控制策略
总结词
通过分析自动驾驶汽车的控制系统,探讨了 自动驾驶汽车在行驶过程中如何实现稳定控 制、避障、路径规划等关键技术。
详细描述
自动驾驶汽车在行驶过程中需要实现稳定控 制、避障、路径规划等技术,这些技术的实 现需要通过传感器、控制器等设备进行信息 采集、处理和决策。其中,稳定控制需要考 虑车辆的动力学模型和行驶环境,避障需要 考虑障碍物的位置、大小和速度等信息,路 径规划需要考虑行驶路径的最优选择和实时
提高传感器精度
总结词
提升感知能力
汽车车身CAN总线系统设计
汽车车身CAN总线系统设计作者:郝魁孙华伟腾彦飞来源:《科技与创新》2014年第07期摘要:随着现代汽车电子技术的发展与广泛应用,汽车车身的电子设备越来越多,各部分通信控制之间更为复杂。
传统电器之间的连接使用点对点方式的单一通信,而使用CAN总线技术使车身电控系统之间的连接更加智能化。
车身使用的是低速的CAN总线网络,对于车身整体控制性要求较低。
车身控制一般包括对门锁、前后视镜、天窗、室内空调等的控制。
关键词:汽车;车身控制;CAN总线;电子技术中图分类号:U469.11 文献标识码:A 文章编号:2095-6835(2014)07-0001-02CAN总线技术主要应用于动力系统子网和车身系统子网,我们研究的车身网络控制属于低速CAN网络。
随着CAN总线技术的广泛应用,其开发流程与方法成为了研究的重点。
基于CAN总线技术的车身控制代替了车身点对点的复杂连接,使用CAN总线式网络拓扑形式,将车身各个控制节点连接,利用软件实现对车身网络节点的综合控制。
1 汽车网络总线开发流程CAN总线技术在车身的广泛应用,使人们更加关注CAN总线的整体开发流程。
车身CAN总线网络的开发流程主要包括系统整体设计和具体实现方法。
系统整体网络设计包括了所有要遵循的设计方法。
使用网络拓扑形式的设计方法时,首先要分析CAN总线的系统功能要求、整体结构的设计与仿真,制订符合CAN总线要求的通信与控制协议,这样才能为供货商提供整车ECU节点设计(包括软件节点、硬件节点、软件与硬件结合节点的系统集成),完成CAN总线的验证与仿真。
具体实现方法包括实现这些功能所需要的硬件和软件的选型与设计。
2 车身CAN总线系统的拓扑结构设计车身网络系统拓扑结构主要包括中央控制器、左右前后车门控制器、车内空调控制器、前后座控制器等,这些控制器都挂接在CAN总线上。
这里我们选择中央控制模块进行研究。
车身网络控制选择的是低速通信,因此传输波特率选择50 kb/s作为CAN总线的通信速率。
bcm论文bcmcan总线汽车电子车身控制系统

【关键词】BCM CAN总线汽车电子车身控制系统【英文关键词】BCM CAN bus Automotive electronic Body control systemBCM论文:经济型轿车车身控制系统设计【中文摘要】随着人们生活水平日益提高,轿车尤其是经济型轿车开始进入平常百姓的生活中。
车身控制系统作为汽车上重要部件之一,对汽车的安全性、舒适性、便捷性有重要的影响。
为了提高和促进国产经济型轿车车身控制系统的水平,本文从车身控制系统基本原理出发,对系统的硬件构成,核心元器件的选择,底层驱动,SCADE逻辑功能代码设计,CAN通讯设计进行了分析与讨论。
在此基础上,设计了带CAN总线的经济型轿车车身控制系统。
目前这套系统已经安装在华泰B11的实验车上,进行了相关的调试和实验工作。
满足了当初的设计要求,并且减少了车身内的线束。
同时针对当前汽车电子的软件设计提出了改进,将SCADE应用于汽车电子实际工程之中,缩短了项开发时间,降低了开发成本,并且提高了代码的可靠性与可维护性。
实验和实际工作经验表明,基于CAN总线的车身控制系统将会逐渐的应用于经济型轿车之中。
此类车身控制系统具有可靠性高、通信实时性好、连接方便等显著优点,对进一步提高国产自主轿车车身控制系统理论研究具有重要意义。
【英文摘要】Along with the rising living standard of thepeople, the cars especially the economy cars began to enter the lives of ordinary people. Body control modular(BCM) as an part of the vehicle has important influence on the vehicle safety, comfort and convenience. In order to improve and promote domestic economic type of car body control system level, this paper analyzes and discusses the hardware structure of the system, selection of core components, the design of SCADE logic function code and CAN communication from the principle of the body control system. Based on this, the paper designs an economy car’s BCM with CAN bus. Now, this BCM has been already assembled in HUATAI B11experimental vehicle. The related experiences and tests have been completed. We come to the conclusion that the BCM designed in this paper meets the design requirements.Also, the wire harness is reduced effectively. Furthermore this design puts forward the improvement measures by using SCADE software in view of the current automotive electronics software design. Therefore, the project development time is shortened and the reliability and maintainability of the code is improved.According to the good performance, the distributed BCM based on CAN bus will be gradually applied in economy car. This type of BCM has the advantages of high reliability, real time communication, convenient connection and so on. It mayhave important significance in improving the domestic independent BCM research level. Keywords:BCM, CAN bus, Automotive electronic, Body control system【目录】经济型轿车车身控制系统设计摘要5-6Abstract6第一章绪论7-111.1 课题研究背景7-81.2 国内外研究现状8-91.3 课题的研究内容和创新点9-11第二章车身控制系统硬件设计11-322.1 需求方案制定11-162.1.1 灯光系统功能12-132.1.2 后视镜功能132.1.3 中控功能13-142.1.4 车窗升降功能142.1.5 遥控设防14-162.2 硬件系统设计16-272.2.1 MCU元器件选型16-172.2.2 MCU及周边电路设计17-182.2.3 输入和信号采集电路18-202.2.4 驱动输出和保护电路设计20-222.2.5 诊断电路设计22-232.2.6 电源电路设计232.2.7 遥控门禁系统设计23-272.3 电动车窗防夹27-302.3.1 防夹区域和防夹力的定义272.3.2 防夹功能设计27-302.4 硬件可靠性设计30-312.5 本章小结31-32第三章CAN总线原理与通信设计32-443.1 汽车网络分类323.2 CAN协议的基本定义与分层结构32-343.2.1 物理层333.2.2 数据链路层33-343.3 帧类型和帧结构34-363.4 CAN总线的拓扑结构36-383.5 CAN应用层协议设计38-393.6 CAN总线节点软件设计39-433.6.1 CAN 模块的初始化软件设计39-413.6.2 CAN节点的发送程序41-423.6.3 CAN节点接收子程序42-433.7 本章小结43-44第四章车身控制系统软件设计44-644.1 软件开发环境介绍44-454.1.1CodeWarrior6.3444.1.2 SCADE软件44-454.2 BCM软件架构设计45-464.3 BCM各节点底层驱动设计46-524.3.1 设置MCU的工作模式46-474.3.2 系统时基和PWM软件设计47-484.3.3 数据采集软件设计48-504.3.4 电机控制策略设计50-524.4 SCADE逻辑功能设计52-584.4.1 SCADE软件使用与电动车窗模块设计52-554.4.2 电动后视镜软件设计55-574.4.3 状态控制软件设计57-584.5 SCADE实现机制分析58-614.5.1 SCADE代码样例58-604.5.2 代码规模与执行效率60-614.6 软件抗干扰措施61-634.6.1 数字滤波技术61-624.6.2 软件陷阱62-634.6.3 冗余技术634.7 本章总结63-64第五章系统验证与实验64-675.1 BCM软件模拟与测试64-655.2 BCM 模块台架功能测试655.3 BCM EMC及其他性能测试65-665.4 本章总结66-67第六章总结与展望67-68致谢68-69参考文献69-71附录71-75攻读硕士学位期间发表的论文75。
汽车can总线系统原理设计与应用

汽车can总线系统原理设计与应用汽车CAN总线系统原理设计与应用一、引言汽车CAN总线系统是现代汽车电子控制系统中的重要组成部分,它采用了一种先进的通信协议,为汽车电子控制单元(ECU)之间提供了高效可靠的数据传输方式。
本文将介绍汽车CAN总线系统的原理设计与应用。
二、汽车CAN总线系统的原理设计1. 总线拓扑结构汽车CAN总线系统采用了总线拓扑结构,即多个ECU通过一根总线进行通信。
这种结构可以有效减少线缆的使用量,降低系统成本,并且具有良好的可扩展性。
2. CAN通信协议汽车CAN总线系统采用了CAN通信协议,它是一种基于事件驱动的通信协议。
CAN总线上的每个ECU都有一个唯一的标识符,用于区分不同的节点。
当一个节点有数据需要发送时,它会将数据发送到总线上,并附带自己的标识符。
其他节点会监听总线上的数据,当收到符合自己标识符的数据时,就会接收并处理。
3. 数据传输汽车CAN总线系统采用了差分传输方式,即数据信号由两个相对电平相反的信号线组成。
这种方式可以有效降低传输过程中的电磁干扰,提高数据传输的可靠性。
4. 容错机制汽车CAN总线系统具有良好的容错机制,当总线上发生错误时,系统能够进行自我修复。
CAN总线采用了循环冗余校验(CRC)技术,可以检测数据传输过程中的错误。
此外,CAN总线还具有冲突检测和错误重传机制,确保数据的可靠传输。
三、汽车CAN总线系统的应用1. 发动机控制系统汽车CAN总线系统在发动机控制系统中发挥着重要作用。
各个传感器和执行器通过CAN总线连接到发动机控制单元(ECU),实现对发动机的监测和控制。
通过CAN总线,发动机控制单元可以获取发动机的工作参数,并根据这些参数进行精确的控制,提高发动机的性能和燃油经济性。
2. 制动系统汽车CAN总线系统在制动系统中也有广泛应用。
刹车踏板的行程传感器、刹车盘温度传感器、刹车液位传感器等信息通过CAN总线传输到制动控制单元(ECU),实现对制动系统的实时监测和控制。
汽车总线系统 (1)
LIN
LIN(local interconnect network) Local:局部 Interconnect:互联 Network:网络
车身系统控制用LAN协议 通信速度:10.4—41.6Kbit/s 低成本串行通信系统,单线连接
Byteflight 重视安全、按用途分类的控制用LAN协议 通信速度: 10Mbit/s BWM公司
2 什么是数据总线
一辆汽车不管有多少块电控单元, 不管信息容量有多大,每台电控单 元都引出两条线共同接在两个节点 上,这两条导线就称作数据总线。 以前各电控单元之间好比有许多人 骑着自行车来来往往,现在是这些 人乘坐公共汽车,公共汽车可以运 输大量乘客,故数据总线亦称BUS 线
3 什么是CAN协议
NOX Sensor J583
Motorelektronik 1 J623
Türsteuergerät, Fahrerseite J386
Geber für Drehrate
G202
ABS mit EDS J104
Sitzbelegungserkennung J706
Airbag J234
Leistungsmodul Scheinwerfer links
J667
Leistungsmodul Scheinwerfer rechts
J668
Automatisches Getriebe J217
Leuchtweitenregelung J431
Elektrische Parkund Handbremse
J540
Niveauregelung J197
Türsteuergerät, Beifahrerseite J387
J518
LIN总线在车身控制系统中的应用

第1 6卷 第 2期
20 0 8年 4月
安 徽 建 筑 工 业 学 院 Байду номын сангаас报 ( 自然科学版)
J u n lo hu n t u eo c i cu e & Id sr o r a fAn i si t fArht t r I t e n u ty
身 控 制 系 统 中 , L N 总 线连 入 低 速车 身系 统 中 , 其 控 制 系 统 具 可 靠 性 、 性 能 和 低 成 本 优 点 。在 器 件 选 将 I 使 高
型上采用 F E C E典型汽车 电子芯 片和智能触点检测模块 , RE S AL 既实现了可 靠网络控制功能 , 同时也降低 车
、
Th pp i a i n o N u n h ce Bo y Co t o lng S s e e a lc to f LI b s i Ve i l d n r li y t m
W A N G M io a
( c o lo lcr nisa d if r t n e gn e ig , h iI siu eo c tcu eI d sr Hee 30 01 Chia S h o fee to c n n o mai n ie rn o An u n tt t fArhiet r n u ty, fi2 6 , n)
m e nd p o nta r duc os u o bie e e t o y t m e e t f e s a e a t m o l lc r h p a d e c tofa t mo l l c r n s s e by s l c r e c l u o bie e e ton c i n i t li ntc i n el ge h p. Ke r s CAN ;LI ;bo y y wo d : N d wor on r k c t ol
汽车总线系统

基本构造
Canbus采用双绞线自身校验的结构,既可以防止电磁干扰对传输信息的影 响,也可以防止本身对外界的干扰。系统中采用高低电平两根数据线,控 制器输出的信号同时向两根通讯线发送,高低电平互为镜像。并且每一个 控制器都增加了终端电阻,已减少数据传送时的过调效应。
CAN收发器
CAN收发器
数据传输终端
因此: 1.只要任何一个控制器激活,则总线激活 2.所有控制器关闭,总线处于未激活状态 激活的总线称为显性电平总线是否有源(是否正在交换别 的信息),必要时会等待,直至总线空闲下来为止。 (某一时间段内的电平1(无源))如果总线空闲下来,发动 机信息就会被发送出去。
(2)网络上的节点(信息)可分成不同的优先级,可以满足不同的 实时要求。
(3)采用非破坏性位仲裁总线结构机制,当两个节点同时向网络 上传送信息时,优先级低的节点主动停止数据发送,而优先级高的 节点可不受影响地继续传输数据。
(4)可以点对点、一点对多点(成组)及全局广播几种传送方式 接收数据。
(5)直接通信距离最远可达10km(速率5Kbps以下)。
目前汽车上的网络连接方式主要采用2条CAN:
一条用于驱动系统的高速CAN,速率达到 500kb/s。主要面向实时性要求较高的控制单 元,如发动机、电动机等
另一条用于车身系统的低速CAN,速率是 100kb/s。主要是针对车身控制的,如车灯、 车门、车窗等信号的采集以及反馈。其特征 是信号多但实时性要求低,因此实现成本要 求低。
集中控制系统:由一个电子控制单元(ECU)同时 控制多个工作装置或系统的电子控制系统。如汽车 底盘控制系统。
控制器局域网络系统(CAN总线系统):由多个电 子控制单元(ECU)同时控制多个工作装置或系统, 各控制单元(ECU)的共用信息通过总线互相传递。
汽车数据总线的名词解释
汽车数据总线的名词解释汽车数据总线是指在电子汽车系统中,用于传输各种数据的系统,类似于人体的神经系统。
它通过连接不同的电子控制单元(ECU),使得车辆各系统之间能够相互通信和交换信息。
汽车数据总线的出现使得汽车电子系统更加智能化和集成化,从而提升了汽车性能和安全性。
1. CAN总线(Controller Area Network,控制器局域网)CAN总线是汽车领域最常用的一种数据总线,它具有高可靠性和抗干扰能力。
CAN总线采用串行通信方式,可以同时传输多个控制器的数据,减少了多个控制器之间的连线数量,节省了空间和成本。
CAN总线广泛应用于车身控制、发动机管理、制动系统等重要汽车系统。
2. LIN总线(Local Interconnect Network,局部互联网络)LIN总线是一种低成本、低速率的数据总线,主要用于车内非关键系统的通信。
相较于CAN总线,LIN总线通信速率较慢,但成本更低。
它常被用于控制车辆的悬挂系统、座椅调节、窗户升降等功能。
LIN总线可以通过数据传输,实现对车内多个设备的控制和监控。
3. FlexRay总线FlexRay总线是一种高速数据总线,可用于高度复杂的汽车系统,如车辆稳定性控制和自动驾驶等领域。
FlexRay总线具有高可靠性和带宽,能够实现大规模的实时通信。
它通过采用时间分割多路访问技术(TDMA)和冗余通信,提供了更高的冗余容错能力,保证了车辆系统的可靠性和安全性。
4. MOST总线(Media Oriented Systems Transport,介质导向系统传输)MOST总线是一种用于车载多媒体通信的高速光纤总线,主要用于音频、视频和数据的传输。
它支持高速传输,确保了音视频信号的高质量传输。
MOST总线广泛应用于车载导航、音响系统、后座娱乐系统等多媒体设备。
5. Ethernet总线以太网总线是一种在汽车电子系统中越来越常见的数据总线。
由于其高带宽和广泛应用的特点,以太网总线被用于实现车辆内部各个子系统(如传感器、驾驶员辅助系统等)之间的高速数据交换。
5.3CAN总线系统
拓展阅读
比亚迪e6整车网络
任务实施
• 1、高压防护作业及场地隔离 • 2、新能源车故障诊断仪连接与使用 • 3、查阅维修手册,并分析CAN总线系统
单元小结
• 1、CAN总线工作原理 • 2、新能源汽车CAN总线结构分析
3.1CAN总线工作原理
(3)汽车CAN总线系统 为了防止外界电磁场的干扰和向外辐射,CAN总线采用2条导线缠绕在一
起的方式,这2条线上的电位是相反的,分为CAN-High和CAN-Low数据线。 目前汽车上的网络连接方式主要采用3条CAN总线。 一条用于动力驱动系统的高速CAN,传输速率达到500kb/s,主要连接发
动机、变速器、制动系统和组合仪表等,它们都是控制与汽车行驶直接相关 的系统。动力系统的CAN总线,H为橙/黑色,L为橙/棕色。
动力系统CAN总线
3.1CAN总线工作原理
舒适CAN,是用于车身系统的低速CAN,传输速率大约是10~125kb/s。 主要连接中控门锁与防盗装置、电动车窗、后视镜和车厢内照明灯等。舒 适系统CAN总线,H为橙/绿色,L为橙/棕色;
CAN总线数据传输方式
3.1CAN总线工作原理
(1)CAN总线结构 CAN总线系统是将若干个控制单元并联到两条数据传输线上,每个控制
单元内都设有1个微处理器、1个CAN控制器和1个信息收发器,除了数据传 输总线以外,其他各元件都安装在各控制单元内部。
CAN 总线系统结构
3.1CAN总线工作原理
整个CAN总线系统有两个120Ω的终端电阻,分别装在两个控制单 元内部,其作用是防止CAN总线信号产生反射现象。当终端电阻出现故 障时,产生的线路反射信号会影响控制单元的其他信号。
学习目标
1.了解新能源汽车CAN总线的工作原理 2.了解新能源汽车CAN总线结构
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
班级:姓名:学号:评定:
班级:
姓名: 学号: 评定:
学习项目单
班级:
姓名: 学号: 评定:
)CAN-H对正极短路工作模式下CAN波形图采集与绘制(注意周期、幅值标注))CAN-H与CAN-L互短模式下CAN波形图采集与绘制(注意周期、幅值标注)
)CAN-L对地短路工作模式下CAN波形图采集与绘制(注意周期、幅值标注))CAN-L对正极短路工作模式下CAN波形图采集与绘制(注意周期、幅值标注)
3.LIN线正常工作模式下波形图采集与绘制(注意周期、幅值标注)
线工作模式下波形图采集与绘制(注意周期、幅值标注)
学习项目单
班级:
姓名: 学号: 评定:。