不二机械手知识重点
不二机械手操作及坐标修改
机械手操作及坐标修改一.先将包装线里的断路器全部开启,然后把包装线门的旋钮打到上电状态,再打包装线上另一个旋钮打到运行状态,包装线启动。
检查机械手底座旁的气压表是否有气压(气压最低标准0.4Mpa)和爪子上的气压表(气压最低标准0.4Mpa)。
二.机械手电器柜开关打到开启状态,把下面的旋钮打到自动(AUTO),按触摸屏上零点复位键,再打旋钮打到手动状态(MAN)。
按触摸屏上“数据包层,步,速度设置”,进行数据包确认,左托盘生产线数据包为“1”,右托盘生产线数据包为“2”。
再把生产线数据包“1和2”的层和步的数字都改为“1”。
如触摸屏出现{举例:生产线1,层2,步2,先按层2修改为1后按“ENTER”,再按步2修改为1后按“ENTER”}。
改好后把手自动旋钮打到自动(AUTO)。
最后按触摸屏上起动,如发现按触摸屏上起动机械手不工作,查看两个按钮盒,把旋钮打到托盘“到位”后按输出按钮就可工作。
三.如发现袋子位置前后左右不准确。
按以下步骤进入微调状态:如发现触摸屏变暗,用手点击下触摸屏就可进行以下操作:1.先按下停止键或周期停止,再把手自动旋钮打到手动(MAN),按“编辑数据包”,选择数据包(左托盘数据包为40KG(50KG)—L,右托盘数据包为40KG(50KG)—R。
输入口令8个零后按“ENTER”进入数据包,然后按“ADJUST”进入修改模式。
选择要修改的层数和步数。
2.“X”是调前后。
在机械手后面往包装线看,左边托盘,如果想把袋子往前移动的话“X”要加,如果想把袋子往后移动的话“X”要减。
右边托盘,如果想把袋子往前移动的话“X”要减,如果想把袋子往后移动的话“X”要加。
(加减的单位为毫米计算)。
“X”是调前后,左边托盘“前加后减”。
右边托盘,“前减后加”。
3.“Y”是调左右。
在机械手后面往包装线看,左边托盘,如果想把袋子往左边移动的话“Y”要加,如果想把袋子往右边移动的话“Y”要减。
右边托盘,如果想把袋子往左边移动的话“Y”要减,如果想把袋子往右边移动的话“Y”要加。
kawasaki机械手与不二机械手的设计与使用的差异要点
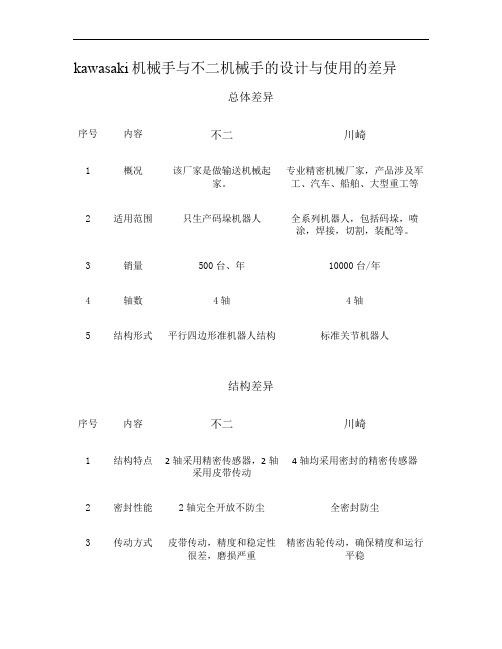
kawasaki机械手与不二机械手的设计与使用的差异
总体差异
序号内容不二川崎
1概况该厂家是做输送机械起
家。
专业精密机械厂家,产品涉及军工、汽车、船舶、大型重工等
2 适用范围只生产码垛机器人全系列机器人,包括码垛,喷
涂,焊接,切割,装配等。
3 销量500台、年10000台/年
4 轴数4轴4轴
5 结构形式平行四边形准机器人结构标准关节机器人
结构差异
序号内容不二川崎
1结构特点2轴采用精密传感器,2轴
采用皮带传动
4轴均采用密封的精密传感器2 密封性能2轴完全开放不防尘全密封防尘
3 传动方式皮带传动,精度和稳定性
很差,磨损严重精密齿轮传动,确保精度和运行
平稳
4 工作半径2600mm 3255mm
5 最大负载120公斤250公斤,将来增产可直接换抓手
及输送设备,不用更换机器人
6 速度1200 1200
7 故障率高正常维护下,基本无故障
8 维护费用皮带等易损件多,部件更
换频繁,每月需要更换润
滑油,维护费用高每年只需定期更换蓄电池及润滑
油及易损件
使用差异
序号内容不二川崎
1 控制方式操作复杂,只能完成简单
的动作,稳定性差操作简单,可根据不同应用预装相应软件,适用不同的动作路径
和应用
2 编程方式专用语言,可扩展性差,
动作生硬As通用语言,扩展性好,动作连
贯流畅。
3 示教器专用示教器多用触摸屏示教器4
5。
机械手应知应会知识概述
机械手应知应会知识概述1. 介绍机械手是一种自动化设备,它具备类似于人类手臂的动作能力,并可以进行精准的操作和控制。
机械手的应用领域非常广泛,包括制造业、物流、医疗等。
了解机械手的基本知识和技能对于使用和维护机械手非常重要。
本文将概述机械手的应知应会知识,并介绍常见的机械手技术和注意事项。
2. 机械手的基本组成(这里可以自己根据你的知识补充)2.1 机械臂机械臂是机械手的核心部件,由多个关节连接而成,可以在三维空间内进行各种灵活的运动。
机械臂通常由连接杆、电机和传感器等组成。
2.2 控制系统控制系统是机械手的大脑,负责接收人类操作者的指令并将其转化为机械手的动作。
控制系统通常采用计算机和专门的控制软件。
2.3 夹具夹具是机械手用来抓取、固定或搬运物体的工具,通常由夹爪、吸盘或磁性材料等组成。
3. 机械手的运动方式机械手可以通过不同的方式进行运动。
常见的机械手运动方式包括点对点运动、连续路径运动和直线插补运动。
3.1 点对点运动点对点运动是指机械手从一个位置移动到另一个位置的运动方式。
机械手在运动过程中通常会停顿一段时间以完成操作。
3.2 连续路径运动连续路径运动是指机械手在沿着预定路径运动时保持运动的连续性。
机械手可以在一段时间内按照预定路径进行运动。
3.3 直线插补运动直线插补运动是指机械手在两个预定位置之间沿直线运动的方式。
机械手可以通过沿直线插补运动来实现复杂的运动轨迹。
4. 机械手的应知应会知识4.1 机械手安全操作知识使用机械手时,安全操作是至关重要的。
操作者需要了解以下几点:•熟悉机械手的工作原理和操作流程;•遵守操作规程和安全操作指南;•掌握急停按钮的位置和使用方法;•注意机械手周围的安全距离,避免人员靠近;•关注机械手的工作状态,如果发生异常应及时停止工作并报告维修。
4.2 机械手日常维护知识保持机械手的良好工作状态需要进行定期检查和维护。
以下是一些常见的维护知识:•定期清洁机械手的关键部件,如关节、夹具等;•检查机械手的电源和电气连接,确保正常运行;•确保机械臂连接杆和夹具等结构件没有松动或损坏;•检查润滑系统,确保各个关节的润滑良好;•定期校准机械手的编码器和传感器。
机械手培训资料
机械手培训资料机械手培训资料(1/2)机械手是一种能够模拟人手动作的装置,被广泛应用于各个行业。
它能够实现反复精准的动作,可以提高生产效率,降低人力成本,并在一些危险环境中替代人手操作。
因此,学习机械手操作技能至关重要。
本文将为您提供一些有关机械手培训的基础知识。
首先,要学会操作机械手,必须先了解其主要组成部分。
机械手通常由机械臂、控制系统和附属设备组成。
机械臂负责模拟人手臂的运动,控制系统控制机械臂的运动轨迹和动作车补偿,而附属设备则包括传感器和工具等。
了解这些基本组成部分,有助于理解机械手的工作原理和操作方式。
其次,学习机械手操作需要掌握一些基础技能。
首先是对机械手的基本结构和零部件进行了解,包括机械臂的关节、连杆和手爪等。
然后需要学习机械手的运动学和动力学,即了解机械臂的运动规律和机械手的动作能力。
还需要学习机械手的编程和控制技术,以及相关的安全知识。
这些基础知识是学好机械手操作的前提。
在学习机械手操作时,还需要了解机械手的应用场景和操作流程。
机械手广泛应用于制造业、物流业、食品加工业等领域。
在不同的应用场景下,操作机械手的流程可能会有所不同。
因此,在培训过程中,要根据不同的应用场景,学习相应的操作流程和技巧。
此外,机械手操作时也需要注意安全事项。
机械手通常是由高速运动的电机驱动的,因此操作时要注意避免人员和设备受伤。
在操作前,要进行充分的安全检查,确保机械手和周围环境的安全。
同时,要严格按照操作规程进行操作,避免发生意外事故。
最后,机械手培训不仅需要理论学习,还需要进行实际操作训练。
只有通过实际操作,才能更好地掌握机械手的使用技巧和应用技术。
因此,在培训过程中,要安排足够的实操时间,让学员亲自操作机械手,熟悉各种操作技巧。
总而言之,机械手培训是学习机械手操作技能的必要步骤。
通过学习机械手的组成部分、基本知识、应用场景和操作流程,以及进行实操训练,可以提高机械手操作的熟练程度和技术水平。
希望本文能够为您对机械手培训提供一些有用的资料。
机械手使用的常识
机械手使用的常识
1、气源保持干燥,清洁。
机械手上使用的气动元件比较多,好的气源可以延长机械手的使
用时间。
2、要经常性保养,机械手的使用要定期保养,检查出小问题,及时处理,处理不了的可以
和浩能机械手厂家联系。
3、三轴伺服机械手全是使用伺服马达来驱动的注塑机械手,一定要在机械手承载的范围内
使用,不用过载使用。
4、注塑机械手和注塑机的配合使用要适当,根据注塑机的合模力的大小吨位,确定机械手
的使用型号不同,机械手型号配的大了机造成不必要的浪费,就像奔驰天天开个40迈的速度,小了就不够用。
5、伺服机械手是当今市面使用比较多的驱动方式的机械手,伺服马达驱动,机械手定位精
准,使用稳定,目前是进口的马达日本的松下等用的比较多,
机械手使用的常识
1、气源保持干燥,清洁。
机械手上使用的气动元件比较多,好的气源可以延长机械手的使用时间。
2、要经常性保养,机械手的使用要定期保养,检查出小问题,及时处理,处理不了的可以和浩能机械手厂家联系。
3、三轴伺服机械手全是使用伺服马达来驱动的注塑机械手,一定要在机械手承载的范围内使用,不用过载使用。
4、注塑机械手和注塑机的配合使用要适当,根据注塑机的合模力的大小吨位,确定机械手的使用型号不同,机械手型号配的大了机造成不必要的浪费,就像奔驰天天开个40迈的速度,小了就不够用。
5、伺服机械手是当今市面使用比较多的驱动方式的机械手,伺服马达驱动,机械手定位精准,使用稳定,目前是进口的马达日本的松下等用的比较多,
6、机械手配件一定要使用原厂的,合适的标准配件,方便哦,
7、机械手配件一定要使用原厂的,合适的标准配件,方便哦,。
助力机械手的自由度

助力机械手的自由度单自由度机械手:单自由度移动机械手是一种结构简单的机械手,通常由一个摆动运动组成,可以直接由摆动气缸、气动手指或真空吸盘组成。
例如,气动手指从取料位置夹住工件后,摆动气缸旋转180°,然后气动手指将在卸料位置释放。
两自由度平移机械手:两自由度平移机械手是工程中简单、应用广泛的自动化机械结构。
机械手的末端是抓取元件,其功能是将工件或产品从初始位置转移到目标位置。
两自由度平移机械手的运动比较简单,所有运动都在一个平面内。
两自由度摆动机械手;两自由度摆动机械手的运动由两部分组成:垂直直线运动和绕垂直轴的摆动运动。
在结构上,两自由度摆动机械手与两自由度平移机械手的区别是将水平运动变成了旋转运动。
三自由度机械手;三自由度机械手的结构比前两类二自由度机械手更复杂,但它是在二自由度机械手的基础上实现的,只增加了一个方向。
两个垂直直线运动和一个振荡运动:X、Y和Z的三个垂直直线运动。
在工程上,三自由度工业机械手主要有两种类型:摇臂式自动取料机械手和横向式自动取料机械手。
这两种机器人广泛应用于注塑机塑料制品的自动取料,具有代表性。
摇臂式自动取料机械手,其运动由X、Y方向相互垂直的直线运动和摆动运动组成,一般为小型机械手,与小型注塑机配套使用。
在自动化装配生产中,除了输送系统的连续输送方式外,还有很多场合需要快速准确地从一个位置抓取一个或多个工件,并将其送到另一个位置进行卸载。
这通常由工程中两个非常重要的自动化设备来完成:机械手和机器人。
1.机械手:机械手是一种结构简单的自动化装置,大部分由气缸驱动,少数由电机驱动(精度更高)。
机构的运动以直线运动为主,自由度较少,一般为2~3个。
2.机器人:机器人是一种自动化装置,功能更强大,只能高于普通机械手。
伺服电机一般由多关节多自由度机构组成,一般有4、5、6个自由度(即俗称的4轴、5轴、6轴),其运动较为灵活。
人类通过非常灵活的手指和关节来抓取工件,但是机械手抓取工件的机械方式有很多种:真空吸盘和气动手指。
机械手的基本知识

再 布置 中间 的 控 制 调
,
与 使用 将 在 有 关 运 动 平 稳 性 的 章 节 中说 明 蓄 能器 的机 械手
,
调 速 和 换 向 回路 等 以 及 相 应 如滤 油
。
蓄 能器 的 用 途
,
主要 可概括 为贮
。
的 液压 元 件
最 后 布 置 其它 辅 助 装 置
存 液压 能 及 缓 和 冲 击 两 个 方 面
。
若 回油
,
一安 全系数
二
。
腔 直接 连通 油 箱 时
8 回二 )
/
,
可近 似取
活 塞 杆直 径 6
,
若 回 油 路装有 背压 阀
活 塞 杆 工 作 时 主 要 承 受 拉 力 或压 力 活塞杆 的强度计 算
强度 问题
,
,
因此
、
则何 油 压 力可 近 似 取 为 背 压 阀 的
可近 似 的 视 为 直 杆 拉
提 高运 动 的 平 稳 性
“
目 前 高速 动 作
,
器
油温冷 却器等 图
∃
在 液 压 系 统 中 都装 设 有 蓄 能 器
。
以
一
为 精 锻 机 上 下 料 机械 手 液 压 系 统
&
卜 晾理 图
排 气 装 置 % 常 用 的排 气 装 置 有 各 种 结 构 的
子 团转 扛 嘴 浦
缸 抓 君纸油
寸 日转 缸 鹿 油
,
,
以保 证 阀 的 使 用 性 能
对
其缺 点是需要 液压 源
,
。
油 的粘度
,
液压 元 件 的寿命 和 性 能 的 影 响 很 大 油温冷 却器%
二保焊机械手安全操作规程
二保焊机械手安全操作规程一、导言二保焊机械手是一种在工业生产线上应用的自动焊接设备。
为了确保工作人员的安全,避免事故的发生,特制定本操作规程。
二、操作范围本操作规程适用于二保焊机械手的操作人员。
三、安全要求1. 操作前必须穿戴好个人防护装备,包括安全帽、防尘口罩、防护眼镜、耳塞、防护服、防静电鞋等。
2. 确保机器设备的正常运行状态,如发现故障,应立即停止操作,并及时向维修人员报告。
3. 操作人员必须经过培训,并持有相应的操作证书。
4. 在械手运动时,严禁靠近械手工作区域,以免被卷入机械部件造成伤害。
5. 禁止将手或其他物体伸入械手工作区域,以免被夹伤。
6. 械手操作结束后,应在机械手上方设置可见的标志,禁止其他人员靠近。
7. 操作过程中禁止擅自拆卸或更换设备部件,以免影响设备正常运行。
四、操作步骤1. 在操作前,检查机械手电源是否已关闭,并断开电源。
2. 执行人员确认操作区域已无其他人员后,方可进行操作。
3. 检查焊机是否处于关闭状态,并确认焊接电缆已断开。
4. 执行人员按照设备操作说明书正确启动机械手。
5. 在机械手启动后,执行人员需保持距离并观察机械手是否运行正常。
6. 在操作过程中,监控机械手的运行状态,如发现异常应立即停止操作。
7. 操作结束后,将机械手恢复到初始状态。
8. 关闭机械手电源,并断开电源。
五、应急措施1. 发现火灾时,立即停止机械手操作,并向岗位附近工作人员呼救,启动灭火器进行扑灭。
2. 发现操作人员受伤时,应立即停止操作,并进行紧急救助,同时通知上级主管和医务人员。
3. 发现设备故障时,应立即停止操作,并及时向维修人员报告,等待维修。
4. 在进行紧急停机时,应在机械手上方设置警示标志,以提醒其他人员注意。
六、事故案例1. 操作人员在机械手启动过程中,由于没有保持距离被械手夹伤,造成手部受伤。
2. 操作人员在机械手运动时,靠近工作区域被机械部件击中,导致脚部受伤。
以上案例只是为了提醒操作人员注意安全,避免类似事故的发生。
富士机械手中文手册

富士机械手中文手册F U J I - A C E码垛机器人用户手册维护与操作EC(61/101/141/201) 系列(FA-01)日本不二输送机工业株式会社050119st用户手册目录维护篇--本手册的第一部分页I .注意事项I-1.一般注意事项I 1-1I-2. 操作前的注意事项I 1-1 II.机器人II-1. 动作范围 II 1-1 II-2. 机器人的主要构成 II 2-1 II-3. 各轴驱动系统图及系统表 II 3-1/2 II-4. 润滑位置 II 4-1/2 II-5. 电池更换方法 II 5-1操作篇 -- 本手册的第二部分III.基本操作IV.操作流程V.示教VI.错误表示与纠错方法VII.其他F U J I - A C E维护手册EC 系列 (FA-01)日本不二输送机工业株式会社050119st维护篇- 内容-页I .注意事项I-1.一般注意事项 I 1-1I-2.操作前的注意事项 I 1-1 II.机器人II-1. 动作范围 II 1-1 II-2. 机器人的主要构成 II 2-1 II-3. 各轴驱动系统图及系统表 II 3-1/2 II-4. 润滑位置 II 4-1/2 II-5. 电池更换方法 II 5-1I.项注意事I- 1. 一般注意事项(1) 本机器人必须由被授权的和接受培训过的人员来操作。
(2)一旦出现紧急情况,请立即按下紧急停止按钮。
在控制面板以及示教盒上面都设有紧急停止按钮。
(3) 如果要进入机器人的动作区域(安全防护栏内),请务必关闭控制电源,停止机器人运行,并将锁定钥匙取出。
(4) 在运行过程中请千万不要越过防护栏进入防护区域。
(5) 在机器人运行过程中,请不要用手触摸限位开关以及光电开关等传感器。
否则可能会引起机器人的误动作。
(6) 请定期检查空气过滤器,适时将冷凝水排出。
(7) 请不要使用不良的托盘:托盘的尺寸误差许可范围为±10mm (长度和宽度)和±5mm (高度).托盘如存在边框、底盘的破损,铁钉突出等现象,请务必将其修复后才能投入使用。
机械手培训资料

在线编程调试
在机械手运行过程中,通过修改 程序参数或重新编译程序进行实
时调试。
机械手的故障排除
硬件故障
检查机械手各部件是否正常工作,如电机、传感 器、电缆等。
软件故障
检查程序逻辑是否正确,参数设置是否合理。
网络故障
检查机械手与控制器之间的通信是否正常,如网 络连接、协议设置等。
04
CATALOGUE
机械手的自动化操作
01
02
03
自动化程序编写
学习如何编写自动化程序 ,以实现机械手的自动化 操作。
自动化操作流程
了解自动化操作的流程和 步骤,包括前期准备、操 作执行和后期处理等。
自动化操作调试
掌握如何调试自动化程序 ,以确保机械手可以正确 地执行自动化操作。
机械手的高级功能
高级编程语言控制
学习使用高级编程语言控 制机械手,以实现更复杂 的操作和功能。
焊接机械手可以24小时不间断地工作,提高生产效率,并且能够保证焊接质量和稳 定性。
焊接机械手可以根据不同的焊接需求进行定制和优化,如弧焊、激光焊等。
05
CATALOGUE
机械手维护与保养
机械手的日常维护
每日检查
01
每天上班前对机械手进行外观检查,包括各部件是否有损伤、
螺丝是否松动等。
润滑保养
02
市场规模持续增长
随着工业机器人技术的不断发展,机械手市场的规模也将 持续增长。
应用领域不断拓展
随着技术的不断发展,机械手技术的应用领域也将不断拓 展。
市场竞争加剧
随着市场规模的不断扩大,机械手市场的竞争也将加剧。
THANKS
感谢观看
机械手应用案例
机械手的控制基础知识讲义

机械手的控制基础知识讲义1. 引言机械手是一种用于执行各种任务的自动控制设备,广泛应用于工业制造、装配和物料搬运等领域。
掌握机械手的控制基础知识对于正确操作和优化机械手的性能至关重要。
本讲义将介绍机械手控制中的一些基本概念和技术。
2. 机械手的基本结构机械手通常由机械臂、末端执行器、传感器和控制系统组成。
机械臂由多个关节和连接件组成,用于实现运动和定位。
末端执行器通常是夹爪、吸盘或其他装置,用于抓取和操纵物体。
传感器用于获取环境信息和机械手状态。
控制系统负责处理传感器数据,并控制机械手的运动。
在机械手的控制中,常用的坐标系有世界坐标系(WCS)、基座坐标系(BSC)和末端执行器坐标系(TCS)。
世界坐标系是一个固定的参考坐标系,用于描述整个环境。
基座坐标系是机械臂的固定部分的参考坐标系,用于描述机械臂的位置和姿态。
末端执行器坐标系是末端执行器的参考坐标系,用于描述末端执行器的位置和姿态。
4. 机械手的运动学机械手的运动学研究如何将末端执行器的位置和姿态转化为关节角度。
正向运动学是指根据给定的关节角度计算末端执行器的位置和姿态。
逆向运动学是指根据给定的末端执行器的位置和姿态计算关节角度。
掌握机械手的运动学可以实现精确的控制和轨迹规划。
机械手的动力学研究机械手的力学特性和运动过程中的力学参数。
动力学分析可以帮助优化机械手的性能,如提高运动速度和准确性,控制运动中的振动和力的作用等。
了解机械手的动力学有助于实现精确的力控制和碰撞检测。
6. 机械手的控制方法机械手的控制方法主要分为开环控制和闭环控制。
开环控制是指根据固定的运动规划和预设的参数来控制机械手的运动。
闭环控制是指根据实际的传感器反馈来调整机械手的运动,以达到预期的目标。
闭环控制可以提高机械手的精确性和稳定性。
7. 机械手的碰撞检测和安全措施在机械手的操作中,碰撞是一个常见的问题。
机械手的碰撞检测可以通过传感器来实现,当机械手与障碍物或其他物体发生碰撞时,及时停止或调整运动,以避免损坏机械手和工作环境。
不二机械手操作及坐标修改
机械手操作及坐标修改一.先将包装线里的断路器全部开启,然后把包装线门的旋钮打到上电状态,再打包装线上另一个旋钮打到运行状态,包装线启动。
检查机械手旁的气压表是否有气压(气压最低标准0.4Mpa)和爪子上的气压表(气压最低标准0.4Mpa)。
二.机械手电器柜开关打到开启状态,把下面的旋钮打到自动(AUTO),按触摸屏上零点复位键,再打旋钮打到手动状态(MAN)。
按触摸屏上“数据包层,步,速度设置”,进行数据包确认,左托盘生产线数据包为“1”,右托盘生产线数据包为“2”。
再把生产线数据包“1和2”的层和步的数字都改为“1”。
如触摸屏出现{举例:生产线1,层2,步2,先按层2修改为1后按“ENTER”,再按步2修改为1后按“ENTER”}。
改好后把手自动旋钮打到自动(AUTO)。
最后按触摸屏上起动,如发现按触摸屏上启动机械手不工作,查看机械手电器柜旁立柱上的两个盒子,把旋钮打到托盘“到位”后按再次启动按钮就可工作。
三.如发现袋子位置前后左右不准确。
按以下步骤进入微调状态:如发现触摸屏变暗,用手轻轻点击下触摸屏就可进行以下操作:1.先按下停止键或周期停止,再把手自动旋钮打到手动(MAN),按“编辑数据包”,选择数据包(左托盘数据包为5X8—L,右托盘数据包为5X8—R)输入口令8个零后按“ENTER”进入数据包,然后按“ADJUST”进入修改模式。
选择要修改的层数和步数。
2.“X”是调前后。
在机械手电气柜的触摸屏往包装线看,左边托盘,如果想把袋子往包装线方向移动的话“X”要加,如果想把袋子往机械手电器柜移动的话“X”要减。
右边托盘,如果想把袋子往包装线方向移动的话“X”要减,如果想把袋子往机械手电器柜移动的话“X”要加。
(加减的单位为毫米计算)。
3.“Y”是调左右。
在机械手电气柜的触摸屏往包装线看,左边托盘,如果想把袋子往左边移动的话“Y”要加,如果想把袋子往右边移动的话“Y”要减。
右边托盘,如果想把袋子往左边移动的话“Y”要减,如果想把袋子往右边移动的话“Y”要加。
机械手二代基本操作
二代基本操作开机当机械手安装好后要进行开机时必须注意以下情况;1,检查电源是否220伏。
2,必须把五号手臂往外伸。
3,三号轴上下行走的位置一定不能有桩挨物。
做好着三个才可以开机,开机就按绿色按钮,开机时机械手每一个臂多要回到零点,当每一个臂多回到零点了这表明开机成功设置参考零点参考零点的作用是当机械手在自动焊接时碰到不应该碰到的桩碍物,把枪头撞偏了,使焊枪对焊缝的位置偏离不能正常工作的情况下,让机械手回到参考零点再进行校正对准零点,就不用重新示教。
操作;看显示器显示主操作页面时按“设置”键,按“1”键进入参考零点设置页面,看显示器,按“锁定”键松开机器〔在按锁定键松开机器之前必须右手拿住三号臂上下的圆柱避免三号上下臂往下掉〕,机器松开后把枪头的丝对准零点后按“锁定”键锁定机器再按“2”键设置这点为参考零点,按“锁定”键松开机器〔在按锁定键松开机器之前必须右手拿住三号臂上下的圆柱避免三号上下臂往下掉〕,把机械手臂往外伸按“锁定”键锁定机器,按“设置”键再输入验证密码按“1”“2”“3”“4”“5”键后再按“设置”键保存,显示器显示会返回到主操作页面。
再按“回零”键机械手就自动回到零点,〔操作员必须看看你设置的零点和机械手自动回到零点是否一样,要是不一样必须重新设置)。
示教示教直线显示器显示主操作页面时按“示教”键,按“0”键(零)新建一个轨迹,显示器显示教页面时把三号臂(上下臂)往上升到最高的位置按“锁定”键锁定机器(注:必须在原点就是说在显示器前面),按“辅助”键,按“.”键输入一个最高点、起点,按“辅助”键结束,按住“角度”键按“删除”或者按“插入”键来调整枪头角度,把枪头调到焊接最佳角度后按“角度”键结束。
在原点按“辅助”键,按“.”键确认焊枪角度调整好后从这个点的位置开始移动,按“锁定”键松开机器〔在按锁定键松开机器之前必须右手拿住三号臂上下的圆柱避免三号上下臂往下掉〕然后把焊枪移到要焊接的焊缝上方按“.”键,按“辅助”键结束(说明焊枪从起点移动到焊接的上方)然后按“直线”键,把枪头移到焊缝焊丝对准焊缝的起点后按“.”键(输入焊接的起点)再把枪头往焊缝的终点移对准焊缝按“.”键(输入焊接的终点)按“直线”键结束,(说明这条直线焊缝输入完成),再把枪头往上移动按“辅助”键按“.”键确定,要是示教完成就把枪头往回拉(示教的原点),枪头回到原点按“.”键确定按“辅助”键结束,再按“示教”键结束示教,按“1”键保存数据,当显示器显示主页面时就按“运行”键,机器就开始工作注意:1:枪头移动时必须高于桩碍物或者多按几个点避开桩碍物,示教示手不能碰焊枪以免示教不准.2:示教直线按直线,示教点焊就按点迹,3:焊接速度点焊时间在焊速+焊速—调4:要焊接就打开机械手的焊机开关示教示教点焊显示器显示主操作页面时按“示教”键,按“0”键(零)新建一个轨迹,显示器显示教页面时把三号臂(上下臂)往上升到最高的位置按“锁定”锁定键锁定机器(注:必须在原点就是说在显示器前面),按“辅助”键,按“.”键输入一个最高点、起点,按“辅助”键结束,再按“辅助”键,按“0”键(零)输入机械手平移的最高位,按住“角度”键按“删除”或者按“插入”调整焊枪的角度,把枪头调到焊接最佳角度后按“角度”键。
机械手(科学启蒙少儿2级)

科学点亮智慧人生
拓展表达
一、机械手在生活中的应用
二、课后将我们自制的机械手进行改装
科学点亮智慧人生
二、平行四边形的特点
平行四边形的 对边相等,对角相等, 且它易变形,增加了 灵活度,适合做机械 手装置。而三角形比 较稳定,不易变形, 不适合用做机械手臂。
科学点亮智慧人生
探究实验
三、杠杆及其分类
科学点亮智慧人生
总结
一、平行四边形的特点
平行四边形的对边相等,对角相等,且它易变形,增加了机械手 臂的灵活度。
二、杠杆及其分类
杠杆是在力的作用下能绕着一固定点转动的硬棒。开瓶器、钳子; 镊子、鱼竿、筷子;跷跷板、天平等。
三、机械手的工作原理
机械手臂之所以可以伸缩自如,主要是因为机械手臂相当于多个 杠杆且每个杠杆之间用四边形相连,四边形具有可变性。所以机械手 可以自如伸缩。
科学点亮智慧人生
准备好了吗?开始实验啦!
小牛顿科学课
机械手
(少儿二级)
主讲:xxx 20xx年xx月xx日
你知道这是什么吗? 机械手
机械手是怎样抓起物体的?
科学点亮智慧人生
探究实验
一、机械手的结构及作用
运动机构:利用形状的改 变,使机械手臂动起来。
手部:拿物体
科学点亮智慧人生
控制系统:施加力量,
机械手培训资料

检查机械手是否处于手动状态 ,排除急停按钮、安全防护装 置等故障,检查电源及气源是
否正常。
抓取位置不准
调整机械手的抓取位置,使其准 确可靠;检查传感器是否准确可 靠,必要时进行调整。
机械手振动
检查机械手的各部件螺丝是否松动 ,排除因螺丝松动产生的振动;如 机械手运行时产生共振现象,需对 机械手的结构进行调整。
机械手日常维护与保养项目
清洁机械手表面及轨道
定期清理机械手表面灰尘、油污等杂质,检查轨道是否有异物,确保机械手正常运行。
检查紧固件
经常检查机械手各部位紧固件是否牢固,如有松动应及时紧固。
检查润滑情况
定期检查机械手各润滑点,确保润滑良好,无干磨现象。
机械手定期检查与保养内容
要点一
检查机械手精度
要点二
THANKS
感谢观看
特点
03
04
05
高效性:机械手可以连 续工作,不受时间和空 间的限制,提高生产效 率。
精度高:机械手可以实 现精确的抓取、搬运和 放置,减少误差和损失 。
适应性广:机械手可以 在不同的环境中工作, 适应各种不同的任务需 求。
机械手发展史和现状
发展史
机械手最早出现于20世纪50年代,经历了初期的探索阶段、 成熟阶段和创新阶段。
04
机械手应用和案例分析
机械手应用领域和场景
制造业
医疗行业
机械手在制造业中应用广泛,如汽车制造、 半导体制造、塑料制品制造等,可用于搬运 、装配、焊接、喷涂等作业。
机械手在医疗行业中用于手术、康复训练、 护理等领域,可以提高医疗效率和精度,降 低医疗成本。
农业
服务业
机械手可用于农业中的播种、施肥、收割等 作业,提高生产效率和降低成本。
不二越机器人标准课程讲义

第3轴马达
本体框架
第2轴马达 第1轴马达
第3轴 动作极限 限位开关 (选配)
各部的名称
操作面板
控制装置
示教器
FD控制装置为例
不二越机器人标准课程
用专用键操作
各轴的名称
第4轴 手腕回转2 第5轴 手腕弯曲 第6轴 手腕回转1
手腕轴
第1轴~第6轴在控制器上 分别以J1~J6表示
第3轴 手臂上下
不二越机器人标准课程
基本规格的读法
最大可搬 重量
手腕部 第1手臂上的负载
手腕容许 的静负载
扭矩
第4轴 第5轴 第6轴
手臂容许 的最大惯 性力矩
第4轴 第5轴 第6轴
重复定位精度
安装方法
安装条件
本体重量
166 kg
210 kg
45kg (最大 90 kg)
951 N・m
1,337 N・m
951 N・m
2.44 rad/s(140゚/s) 2.32 rad/s(133゚/s)
4.54 rad/s(260゚/s)
3.49 rad/s(200゚/s)
关节的数量 一般构造为「6」
多少范围内可 进行工作
多短时间内可 进行工作
・3.14[rad] = 180[° ], 1[N・m] = 1/9.8[kgf・m] ・第1轴~第6轴在控制画面上分别以J1~J6表示
表示控制装置的类型。
AX20控制装置
FD11控制装置
不同机器人所使用的控制装置的型号不同。 一台机器人可用多台控制装置控制。
不二越机器人标准课程
各部的名称
手腕
第一手臂
第5轴马达第二手臂第3轴动作极限 限位开关 (选配)
机械手,夹持器学习资料
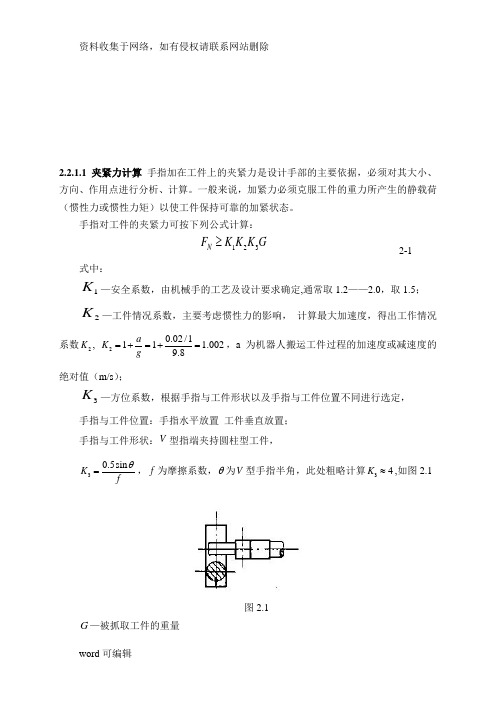
2.2.1.1夹紧力计算 手指加在工件上的夹紧力是设计手部的主要依据,必须对其大小、方向、作用点进行分析、计算。
一般来说,加紧力必须克服工件的重力所产生的静载荷(惯性力或惯性力矩)以使工件保持可靠的加紧状态。
手指对工件的夹紧力可按下列公式计算:123N F K K K G≥ 2-1式中:1K —安全系数,由机械手的工艺及设计要求确定,通常取1.2——2.0,取1.5; 2K —工件情况系数,主要考虑惯性力的影响, 计算最大加速度,得出工作情况系数2K , 20.02/111 1.0029.8a K g =+=+=,a 为机器人搬运工件过程的加速度或减速度的绝对值(m/s );3K —方位系数,根据手指与工件形状以及手指与工件位置不同进行选定,手指与工件位置:手指水平放置 工件垂直放置; 手指与工件形状:V 型指端夹持圆柱型工件,30.5sin K fθ=,f 为摩擦系数,θ为V 型手指半角,此处粗略计算34K ≈,如图2.1图2.1G —被抓取工件的重量求得夹紧力NF ,123 1.5 1.002439.8176.75N F K K K Mg N==⨯⨯⨯⨯=,取整为177N 。
2.2.1.2驱动力力计算根据驱动力和夹紧力之间的关系式:2sin N FcF b a=式中:c —滚子至销轴之间的距离; b —爪至销轴之间的距离;a —楔块的倾斜角可得2sin 177286sin16195.1534N F b a F N c ⨯⨯⨯===o,得出F 为理论计算值,实际采取的液压缸驱动力'F 要大于理论计算值,考虑手爪的机械效率η,一般取0.8~0.9,此处取0.88,则:'195.15221.7620.88FF N η=== ,取'500F N = 2.2.1.3液压缸驱动力计算设计方案中压缩弹簧使爪牙张开,故为常开式夹紧装置,液压缸为单作用缸,提供推力:2=4F D p π推式中 D ——活塞直径 d ——活塞杆直径 p ——驱动压力,'F F =推,已知液压缸驱动力'F ,且'50010F N KN =<由于'10F KN <,故选工作压力P=1MPa据公式计算可得液压缸内径:25.231D mm===根据液压设计手册,见表2.1,圆整后取D=32mm 。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
机械手学习一、机械手主板接线对应:1、CN9 安全继电器部2、CN13和CN12示教器连接线和急停线3、CN11 PLC、触摸屏通讯线4、CN20 继电器驱动5、CN22 电磁部驱动6、CN21 电机抱闸检查,正常电压为DC60V7、CN10 pc通讯,传程序8、CN 4、5、6、7、8 电机编码器9、TB3 输出端子hand1-6 抓手开关,hand1位抓手开合,hand3为上下压板,其余未用10、TB2 输入端子hisn1-3 气缸到位检测psw 低气压报警HSIN、HSIN10再生电阻温度传感器报警11、TBI Z、R、T、A四轴限位开关12、TB4 P24、N24 为DC24供电;P5、N5为DC5v供电,供电电压为5.18-5.22V(9-N5;10-P5)13、TB5 动力端子,电压为DC300V14、CN14 Z轴电机动力,接线自上而下红白黑电压为AC200V-AC220V 可以和T轴互换15、CN15 R轴电机动力,电压为AC200V-AC220V 可以和A、B轴互换16、CN16 T轴电机动力,接线自上而下黑白红,电压为AC200V-AC220V17、CN17 A轴电机动力,电压为AC200V-AC220V18、CN18 B轴电机动力,电压为AC200V-AC220V二、示教器1、机械手开关打到手动,示教器上电2、在安全情况下可以伺服上电,对四个轴进行动作调试,Z-Z轴向上动作Z+ Z 轴向下动作R- R轴向后动作R+ R轴向前动作A- A顺时针动作A+ A轴逆时针动作T- T轴顺时针动作T+ T轴逆时针动作3、按next pag 切换下一页4、按PREV 切换上一页5、WRITE 写入三、示教器找数据包抓取点1、机械手开关打到手动,示教器上电2、按WRITE 进入,按+、- 键选择数据包3、layer= 选择00 step=01(右)02(左)4、伺服上电5、点击MOVE和Z- 进行找到原数据包零点四、示教器设置数据包抓取点1、按示教器WRIET进入,通过+、- 键选择数据包2、按WRITE进入,layer=选择00,step=01(右)02(左),左右指黑管位置3、伺服上电,根据抓手位置调整到轨道中抓取点合适位置4、按WRITE写入,保存5、把STEP 01改为03 按WRITE写入6、抬起抓手,把STEP 01改为02,依次找到抓取点合适位置7、按WRITE写入保存8、把STEP 02改为04 按WRITE写入9、按back键退出,更改数据包按write写入保存,即可五、备份导入后找数据C点是否正确(轨道中找)1、机械手开关打到手动,示教器上电2、同时按<>键,3、按NEXT PAG 找到feed(轨道)4、按WRITE写入,找到release setting5、按WRITE写入,进入C点6、伺服电机上电7、点击MOVE和Z- 进行找到原备份C点8、如果正确即可使用原先C点,如不正确,微调后按WRITE写入保存六、找备份数据A、B点1、机械手开关打到手动,示教器上电2、同时按<>键,3、按NEXT PAG 找到pallent(托盘)1(左)2(右)4、按write进入后按NEXT PAG找到setting进行设置5、按+、-进行A、B点选择6、伺服上电7、点击MOVE 进行找A点或B点七、自动数据包建立1、机械手开关打到手动,点击触摸屏菜单进入数据包编辑2、选择要新建的数据包,输入密码000000003、输入用户名以方便以后找到该数据包4、测量袋子的长宽高(轨道中挡板的长度为袋子长度,袋子长度为宽度)5、输入到触摸屏6、输入托盘尺寸(长的为宽度。
机械手同向为长度,机械手平行为宽度)7、步、层数根据需要自己设定8、输入总层数9、选择线1或线210、根据需要选择码垛样式11、点击p.cal进行复制12、检查每层高度,用示教器进行找到每步轨迹13、打到自动,选择数据包进行运行注意:只有机械手,ABC点和避障点设置好以后,机械手中心距离到托盘中心距离为1.7米才可以使用自动数据包建立八、手动编程数据包1、在编程里面建立数据包,开始设置和自动编程一致2、选择模式的时候不能选择固定模式,必须选择9999模式3、建立机械手抓取点,(可以使用其他数据包找到后进行数据包抓取点复制)4、把袋子放入轨道,用手动抓住后,根据袋子方向确认左抓或是右抓5、用示教器调整机械手,调整到第一层第一步的位置6、按WRITE写入,根据左抓或右抓,更改release,1为右,2为左,p01为托盘1,p02位托盘2,层数更改为1层,步数更改为1步7、调整第二步,根据左抓或右抓,更改release,1为右,2为左和托盘号,p01为托盘1,p02位托盘2,8、第一层做完保存后做第二层(做法同第一层)9、用触摸屏进入数据包,进行高度和每一步数据,查看高度正常后,进行CY.COPY,选择write high(带高度复制)进行循环复制10、重新查看数据包每袋和每层数据,主要为高度11、用示教器每一步手动运行看一下12、选择数据包进行自动运行九、查看T轴齿轮间隙1、进入隐藏菜单输入密码111111112、点击MAINTE NANCE进入3、点击CONSUMP TION4、查看VAL(或.BL)不能超过50.越小越好5、OPIGINAL(初始值)6、点击COMPULSORY(检测),数值变更后,把VAL值写入OPIGINAL7、201系列用初始值+90写入IND值,171系列用初始值+100写入IND值151系列用初始值+110写入IND值8、退出十、隐藏菜单强制数据1、数据56项把0改为1,是强制抓取2、把数据1项中0改为1,是强制线1,改为2为强制线2十一、轴号更换1、进入隐藏菜单输入密码111111112、点击EDIT PARAM进入3、点击EACH AXIS 进入,4、第三行选项CPU 进行更改通道号5、按《》查看每轴轴号注意:新导入备份程序必须查看通道号十二、基础设置查看1进入隐藏菜单2、点击INITIAL SETTING进入3、点击BASIC选项1为机器人型号,2 线3 feeds 轨道4pal.托盘5TRESTLE HEIGHT 底盘高度6feed label袋口方向STOPPER为袋口朝内(机械手)R.STOP袋口朝外,一般使用袋口朝外十三:常见报警代码1、0033 气压低报警2、0034 周围C/V全部异常3、0036电阻异常(再生)温度传感器4、5023 再生电阻连接5、5020 DC300V报警低电压6、0037侵入检测异常7、0051电池几乎五点8、0056过度使用紧急停止按钮的后果,一天不能超过3次9、0100 +5V电源错误,低于4.7V正常5.18-5.2210、5001-5008 超限位开关11、5021 过电压12、5028 主板电源保险坏十四、201零点复位:在零点复位时一次性找不到零点,来回找是什么原因?怎么处理?1、201共5个接近开关,全部为机械式接近开关,2、节点开关不灵敏,引起找不到零点3、接近开关脏、卡手动活动一下4、长时间未断电,未进行零点复位十五、水泥电阻阻值、再生电阻电压1、正常水泥电阻阻值为82欧姆,对机械手主板DC300V起到降压作用2、再生电阻停机时为10欧姆,在工作状态阻值随着温度升高而变化十六、主板正常供电电压为多少,电压范围?主板正常供电电压为DC5V和DC24V电压范围为5.18V-5.22V,根据主板使用程度和机械运行程度,在主板老化的情况下可以适当把5V电压调高十七、对于报警AX01(x代表每个轴号)如何判断处理?AX01为轴编码器异常,提示重新上电故障原因:伺服放大器异常、编码器输入发生异常处理方法:1、确认编码器的连接线是否正常,确认编码器线9/10针脚配线正常,如果连接正常请进行轴号变更、确认动作异常原因为明了前,请勿进行主板更换2检查伺服电机编码器是否正常,,编码器里面光栅为玻璃制造,撞击易碎,3、IC击穿,检查编码器线路4、线缆,编码器线缆接触不良,出现AX101多数问题出在线上十七、对于报警AX02(x代表每个轴号)如何判断处理?AX02为轴动力输出异常故障原因:伺服放大器异常、IPM内部产生短路电流或IPM控制电源存在异常处理方法:1、关闭电源,确认LED灯消失后,拔掉马达动力线和CN21抱闸接口2、测量马达动力线U、v、w和P、N之间的阻值,该阻值为零或非常低的情况下为IPM故障3、浪涌冲击4、如无异常,请用手动模式打开伺服,如果再次发生报警,请更换主板5、检查轴号是否正常十七、对于报警AX07(x代表每个轴号)如何判断处理?AX107为轴电流检测异常故障原因:电流检测元件坏、重新上电伺服放大器异常,从电流检测取得的电压异常处理方法:更换主板十八、不二机械手主板刷机步骤一、备份:导入程序前先备份程序,备份好的文件是.fcal文件。
二、清空参数:断电,拨码4-4设ON,送电5秒以上再断电,4-4设OFF。
三、导入程序:1、导入系统程序:断电,拨码4-1设ON,送电,双击V30.18导入;(打开exe文件,传送给主板。
)断电,拨码4-1设OFF,2、导入机器人程序:断电,拨码4-2设ON,送电,在FLASH下选初回导入;(传的是.mot文件)。
传送完再断电。
再开电。
3、导入参数程序:用软件里的all parameters(左上角第一个)的send进行备份文件的传送(就是把刚刚保存的文件再传进去)。
(格式为.fcal的文件。
)传好以后再进行断电,再开电。
注:以上步骤请作业前仔细看明白,不清楚的提前问,操作错误的话可能会使机器人不动作,请谨慎!!。