第3章 工业机器人静力计算及动力学分析
工业机器人的力学分析
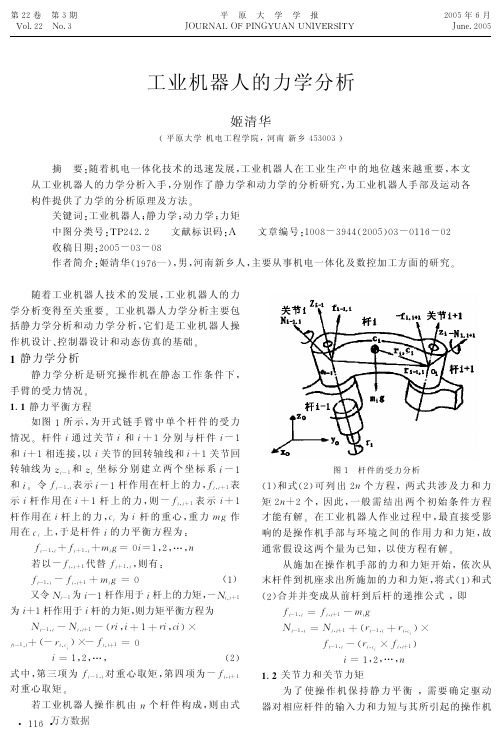
第!!卷!第"期#$%&!!!’$&"!!!!!平!原!大!学!学!报()*+’,-)./0’12*,’*’0#3+4052!!!!!667年8月!(9:;&!667工业机器人的力学分析姬清华!平原大学机电工程学院"河南新乡<7"66"#!!摘!要!随着机电一体化技术的迅速发展!工业机器人在工业生产中的地位越来越重要!本文从工业机器人的力学分析入手!分别作了静力学和动力学的分析研究!为工业机器人手部及运动各构件提供了力学的分析原理及方法"关键词!工业机器人#静力学#动力学#力矩中图分类号!5/!<!W !!!文献标识码!,!!文章编号!=66>?"@<<!!667#6"?6==8?6!!!收稿日期!!667?6"?6>作者简介!姬清华$=@A 8%&!男!河南新乡人!主要从事机电一体化及数控加工方面的研究"!!随着工业机器人技术的发展"工业机器人的力学分析变得至关重要$工业机器人力学分析主要包括静力学分析和动力学分析"它们是工业机器人操作机设计%控制器设计和动态仿真的基础$P 静力学分析静力学分析是研究操作机在静态工作条件下"手臂的受力情况$P &P 静力平衡方程如图=所示"为开式链手臂中单个杆件的受力情况$杆件)通过关节)和)N =分别与杆件)U =和)N =相连接"以)关节的回转轴线和)N =关节回转轴线为2)U =和2)坐标分别建立两个坐标系)U =和)$令5)U =")表示)U =杆作用在杆上的力"5)")N =表示)杆作用在)N =杆上的力"则U 5)")N =表示)N =杆作用在)杆上的力"*)为)杆的重心"重力<1作用在*)上"于是杆件)的力平衡方程为&5)U =")N 5)N =")N <)1K 6)K ="!"’"#若以5)")N =代替5)N =")"则有&5)U =")U 5)")N=N <)1K 6!=#!!又令;)U =为)U =杆作用于)杆上的力矩"U ;)")N =为)N =杆作用于)杆的力矩"则力矩平衡方程为;)U =")U ;)")N=U !&)")N =N &)"*)#V 5)U =")N !U &)"*)#V U 5)")N =K 6!!)K ="!"’"!!#式中"第三项为5)U =")对重心取矩"第四项为U 5)")N =对重心取矩$若工业机器人操作机由#个杆件构成"则由式图=!杆件的受力分析!=#和式!!#可列出!#个方程"两式共涉及力和力矩!#g !个"因此"一般需结出两个初始条件方程才能有解$在工业机器人作业过程中"最直接受影响的是操作机手部与环境之间的作用力和力矩"故通常假设这两个量为已知"以使方程有解$从施加在操作机手部的力和力矩开始"依次从末杆件到机座求出所施加的力和力矩"将式!=#和式!!#合并并变成从前杆到后杆的递推公式"即5)U =")K 5)")N=U <)1;)U =")K ;)")N =N !&)U =")N &)"*)#V 5)U =")U !&)"*)V 5)")N =#!!)K ="!"’"#P &N 关节力和关节力矩为了使操作机保持静力平衡"需要确定驱动器对相应杆件的输入力和力短与其所引起的操作机(8==( 万方数据手部力和力矩之间的关系!令*)为驱动元件)的第)个驱动器的驱动力或驱动力矩"并假设关节处无摩擦"则有当关节是移动副时"如图!所示"*)应与该关节的作用力5)U =")在2)U =上的分量平衡"即*)K -O)U =5)U=")式中-)U =为)U =关节轴的单位向量!上式表明驱动器的输入力只与5)U =")在2)U =轴上的分量平衡"其他方向的分量由约束力平衡"约束力不作功!当关节是转动副时"*)表示驱动力距"它与作用力矩;)U =")在2)U =轴上的分量相平衡"即*)K -O)U =;)U=")图!!移动关节上的关节力N 动力学分析动力学分析是研究操作机各主动关节驱动力与手臂运动的关系"从而得出工业机器人动力学方程!目前已提出了多种动力学分析方法"这里仅就用牛顿欧拉方程建立工业机器人动力学方程作简要介绍!图"!杆件动力学方程的建立!!动力学方程可以用两个方程表达#一个用以描述质心的移动"另一个描述质心的转动!前者称为牛顿运动方程"后者称为欧拉运动方程!取工业机器人手臂的单个杆件作为自由体"其受力分析如图"所示!图中(*)为杆件)相对于固定坐标系的质心速度"+)为杆件)的转动角速度!因为固定坐标系是惯性参考系"所以将杆件)的惯性力加入到静力学方程式$=%中"于是有牛顿运动方程#5)U =")U 5)")N=N <)1U <)W (*)K 6)K ="!"&"#$"%作用在杆件)上的惯性矩是该杆件的瞬时角动量对时间的变化率!令+)为角速度向量"B )为杆件)质心处的惯量"于是角动量为B )+)!因为惯量随杆件方位的变化而变化"所以角动量对时间的导数不仅包含B )W +)"而且包含因B )的变化而引起的变化+)V B )+)"即陀螺力矩"上述两项加到静力学力矩平衡式$!%中"得;)U =")U ;)")N =N &)"*)V 5)")N =U &)U ="*)V 5)U =")U B W +)U +)V B )+)K 6)K ="!"&"#$<%公式$"%和$<%是单个杆件的动力学特性关系式"若将工业机器人的:个杆件均列出相应的上述两个方程"即得到工业机器人完整的动力学方程组的基本形式#牛顿’欧拉方程!!!参考文献!!="徐元昌#陶学恒&工业机器人!["&北京$中国轻工业出版社#=@@@&!!"陈小川#刘晓冰&虚拟制造体系及其关键技术!("&计算机辅助设计与制造#=@@@#%=6&&!""盛晓敏#邓朝晖&先进制造技术!["&北京$机械工业出版社#!66<&!<"邱士安&机电一体化技术!["&西安$西安电子科技出版社#!66<&【责任编校!李东风】@"@"’-.()(45B %*$’")*(!"U 474#_K +)"2?$,’$C "*0$#)*$+$#DX +"*8&)*$+X #1)""&)#1H "I $&8<"#8’5%)#1.3$#6#)("&7)8."9)#:)$#1"!"#$#<7"66"40)#$%@7(#1’*##_C G BG B ;F E J C II ;T ;%$J M ;:G$O [;H B E G F E :C H D "G B ;F $K $GE J J %C ;IC :C :I 9D G F L BE T ;K ;H $M ;M $F ;E :IM $F ;C M J $FG E :G &5B C D E F G CH %;E :E %L c ;D O F $M M ;H B E :C H D "I C D H 9D D ;D O F $MG B ;D G E G C H D E :II L :E M C H D D ;J E F E G ;%L E :I$O O ;F D G B ;G B ;$F C ;D $O E :E %L c C :Q E F M M $T ;M ;:G E :I H $M J$:;:G $O F $K $G D &A %.:41/(#F $K $G (D G E G C H D (I L :E M C H D (M $T ;M ;:G )A ==) 万方数据工业机器人的力学分析作者:姬清华, JI Qing-hua作者单位:平原大学,机电工程学院,河南,新乡,453003刊名:平原大学学报英文刊名:JOURNAL OF PINGYUAN UNIVERSITY年,卷(期):2005,22(3)被引用次数:2次1.邱士安机电一体化技术 20042.盛晓敏;邓朝晖先进制造技术 20043.陈小川;刘晓冰虚拟制造体系及其关键技术 1999(10)4.徐元昌;陶学恒工业机器人 19991.陈登瑞六自由度机械手本体结构关键技术研究[学位论文]硕士 20062.张烈霞工业机器人运动及仿真研究[学位论文]硕士 2006本文链接:/Periodical_pydxxb200503036.aspx。
第3章工业机器人静力学及动力学分析
工业机器人动力学的任务
• 工业机器人动力学问题有两类: • (1)动力学正问题:已知关节的驱动力
,求工业机器人系统相应的运动参数, 包括关节位移、速度和加速度。 • (2)动力学逆问题:已知运动轨迹点上 的关节位移、速度和加速度,求出相应 的关节力矩。
•
研究工业机器人动力学的目的
• 动力学正问题对工业机器人运动仿真是 非常有用的。
•
• 图3-1所示二自由度平面关节型工业机器 人手部的速度为:
• 假如1及2是时间的函数,1=f1(t), 2=f2(t),则可由此式求出手部的瞬时速
度V=f(t) 。
•
• 对于图3-1所示2R工业机器人,若令J1、
J2分别为式(3-9)所示雅可比的第一列矢量 和第二列矢量,则式(3-13)可写成:
• 通常J-1出现奇异解的情况有下面两种: • 1) 工作域边界上奇异。当臂全部伸展开
或全部折回而使手部处于工作域的边界 上或边界附近时,出现J-1奇异,这时工 业机器人相应的形位叫做奇异形位。 • 2) 工作域内部奇异。奇异也可以是由两 个或更多个关节轴线重合所引起的。
• dq=[dq1 dq2 … dqn]T反映了关节空间的微 小运动。
• 手部在操作空间的运动参数用X表示,它 是关节变量的函数,即X=X(q),并且是 一个6维列矢量。
dX=[dx dy dz x y z]T
• dX反映了操作空间的微小运动,它由工业 机器人手部微小线位移和微小角位移(微小 转动)组成。
•
3.2 工业机器人速度雅可比与速 度分析
• 3.2.1 工业机器人速度雅可比
• 数学上雅可比矩阵(Jacobian matrix)是一 个多元函数的偏导矩阵。
• 假设有六个函数,每个函数有六个变量 ,即:
《工业机器人技术及应用》教学课件—03工业机器人运动学和动力学

规定:
①列阵[a b c 0]T中第四个元素为零, 且a2+b2+c2=1, 表示某轴(或某矢量)的方向;
图3-2 坐标轴方向的描述
②列阵[a b c ω]T中第四个元素不为零, 则表示空间某点的位置。
3.1 工业机器人的运动学
例如, 在图3-2中, 矢量v的方向用(4×1)列阵表示为
其中: a=cosα, b=cosβ, c=cosγ。
当α=60°, β=60°, γ=45°时, 矢量为
3.1 工业机器人的运动学
4. 动坐标系位姿的描述就是用位姿矩阵对动坐标系原点位
置和坐标系各坐标轴方向的描述。该位姿矩阵为(4×4)的方 阵。如上述直角坐标系可描述为:
3.1 工业机器人的运动学
5. 刚体位姿的描述 机器人的每一个连杆均可视为一个刚体, 若给定了刚体
(3-1)
图3-1 点的位置描述
其中, px、 py、pz是点P的三个位置坐标分量。
3.1 工业机器人的运动学
2. 点的齐次坐标 如用四个数组成的(4×1)列阵表示三维空间直角坐标系
{A}中点P, 则该列阵称为三维空间点P的齐次坐标, 如下:
(3-2)
齐次坐标并不是惟一的, 当列阵的每一项分别乘以一个
X
同理,手部坐标系Y’与Z’轴的方向可分别用单位
矢量o和α 来表示。
手部位姿可用矩阵表达为:
3.1 工业机器人的运动学
7. 目标物位姿的描述 任何一个物体在空间的位置和姿态都可以用齐次矩阵
来表示, 如图3-5所示。楔块Q在(a)图的情况下可用6个点 描述,
图 3-5 目标物的位置和姿态描述
3.1 工业机器人的运动学
的旋转如图3-8所示。A(x, y,
第03章 机器人的运动学和动力学

教案首页课程名称农业机器人任课教师李玉柱第3章机器人运动学和动力学计划学时 3教学目的和要求:1.概述,齐次坐标与动系位姿矩阵,了解平移和旋转的齐次变换;2.机器人的运动学方程的建立与求解*;3.机器人的动力学*重点:1.机器人操作机运动学方程的建立及求解;2.工业机器人运动学方程3.机器人动力学难点:1. 机器人动力学方程及雅可比矩阵基本原理思考题:1.简述齐次坐标与动系位姿矩阵基本原理。
2.连杆参数及连杆坐标系如何建立?3.机器人动力学方程及雅可比矩阵基本原理是什么?第3章机器人运动学和动力学教学主要内容:3.2 齐次坐标与动系位姿矩阵3.3 齐次变换3.4 机器操作机运动学方程的建立与求解3.5 机器人运动学方程3.6 机器人动力学本章将主要讨论机器人运动学和动力学基本问题。
先后引入了齐次坐标与动系位姿矩阵、齐次变换,通过对机器人的位姿分析,介绍了机器人运动学方程;在此基础上有对机器人运动学方程进行了较为深入的探讨。
3.1 概述机器人,尤其是关节型机器人最有代表性。
关节型机器人实质上是由一系列关节连接而成的空间连杆开式链机构,要研究关节型机器人,必须对运动学和动力学知识有一个基本的了解。
分析机器人连杆的位置和姿态与关节角之间的关系,理论称为运动学,而研究机器人运动和受力之间的关系的理论则是动力学。
3.2 齐次坐标与动系位姿矩阵3.2.1 点的位置描述在关节型机器人的位姿控制中,首先要精确描述各连杆的位置。
为此,先定义一个固定的坐标系,其原点为机器人处于初始状态的正下方地面上的那个点,如图3-1(a)所示。
记该坐标系为世界坐标系。
在选定的直角坐标系{A}中,空间任一点P的位置可以用3×1的位置向量A P表示,其左上标表示选定的坐标系{A},此时有A P=XYZ P P P ⎡⎤⎢⎥⎢⎥⎢⎥⎣⎦式中:P X、P Y、P Z—点P在坐标系{A}中的三个位置坐标分量,如图3-1(b)。
3.2.2 齐次坐标将一个n维空间的点用n+1维坐标表示,则该n+1维坐标即为n维坐标的齐次坐标....。
1第三章机器人力学分析及动力学模型

§3.1机器人动力学
刚体的惯性张量
三维空间中自由运动的刚体是用惯性张量来描述它的质量分布和性质 的。以刚体的质心C为原点定义一个坐标系{C},惯性张量在{C}中表示为 一个3 × 3 对角矩阵。 I XX = ∫∫∫ y 2 + z 2 ρ dv I XY = ∫∫∫ xyρdv V ⎡ I XX I XY I XZ ⎤ V ⎢I ⎥ 其中 I = I YY = ∫∫∫ x 2 + z 2 ρ dv xzρdv I C = ⎢ XY I YY I YZ ⎥ XZ ∫∫∫V V I ZZ = ∫∫∫ y 2 + x 2 ρ dv ⎢ I XZ I YZ I ZZ ⎥ I YZ = yzρdv ⎣ ⎦
第三章
机器人力学分析及动力学模型
§3.1 机器人静力学分析 §3.2 机器人动力学方程 动力学概述:
1. 内容: 力——运动 2. 描述方法:一组微分方程 3. 任务:建立机器人的动力学模型 1)正模型——已知力求产生的运动 2)逆模型——已知运动求所需的力
1
§3.1机器人静力学
研究内容
机器人与环境接触时,界 面上将产生相互作用力和力矩。 机器人的每个关节都由一个 驱动器驱动,相应的输入关节 力矩通过杆件传送给末端执行 器作用在环境和对象上。 静力学讨论当机器人静止时 在驱动器扭矩和由它产生的施加在机器人末点的力和力矩之 间的关系,这对机器人的控制是重要的。
移动关节 ⎧ b j −1 =⎨ ⎩b j −1 × r j −1,ci 旋转关节
J
(i ) Aj
⎧ 0 =⎨ ⎩b j −1
移动关节 旋转关节
系统动能(3)
整理可得
1 n 1 T (i ) T ( i )T ( i ) T ( i )T T = ∑ m i q J L J L q + q J A I i J A q = q Hq 2 i =1 2
工业机器人的运动学及动力学

工业机器人的动力学方程
动力学方程是描述机器人受到的力和力矩与其运动状态之间 关系的数学模型。
动力学方程包括牛顿方程(描述机器人受到的力和加速度之 间的关系)和欧拉方程(描述机器人受到的力矩和角加速度 之间的关系)。
轻量化与模块化设计
为了便于运输和部署,工业机器人将采用更轻的材料和设计,同时采 用模块化设计,便于维护和升级。
工业机器人在工业领域的应用前景
自动化生产线
工业机器人将在自动化生产线中 发挥重要作用,实现生产过程的 自动化和智能化,提高生产效率
。
质量检测
机器视觉和人工智能技术的引入 ,使得工业机器人能够更精准地 检测产品质量,降低检测成本。
结合位置和力控制,实现 机器人在复杂环境中的适 应性和灵活性。
工业机器人的运动控制器
硬件控制器
使用专门的硬件设备进行 机器人运动控制,具有高 效、稳定的特点。
软件控制器
通过软件实现对机器人的 运动控制,具有灵活、易 升级的特点。
云端控制器
通过网络连接实现远程控 制,方便对机器人进行远 程调试和维护。
运动学是研究物体运动的科学,它涉 及物体的位置、姿态和速度等信息的 描述。
在机器人领域,运动学主要关注机器 人各关节的位置和姿态,以及它们之 间的相互关系。
工业机器人的坐标系
工业机器人通常采用笛卡尔坐标 系(也称为直角坐标系)来描述
其位置和姿态。
笛卡尔坐标系包括x、y、z三个 坐标轴,用于描述物体在空间中
精度
通过优化算法和结构设计,提 高机器人的运动精度。
第3章工业机器人静力计算及动力学分析

(3.3) 称为雅可比矩阵。
第3章 工业机器人静力计算及动力学分析
以二自由度平面关节机器人为例,如图3-1所示,机器人的
手部坐标(x,y)相对于关节变量(θ1,θ2)有
(3.4)
即
(3.5)
图3-1 二自由度平面关节机器人
第3章 工业机器人静力计算及动力学分析 求微分有 (3.6) 写成矩阵为
① 工作域边界上的奇异: 机器人手臂全部伸开或全部
折回时,叫奇异形位。该位置产生的解称为工作域边界上的 奇异。 ② 工作域内部奇异: 机器人两个或多个关节轴线重合 引起的奇异。当出现奇异形位时,会产生退化现象, 即在某 空间某个方向(或子域)上, 不管机器人关节速度怎样选择, 手部也不可能动。
第3章 工业机器人静力计算及动力学分析
(3.14)
. 若已知关节上θ1与θ2是时间的函数,θ1=f1(t),θ2=f2(t), 则可 求出该机器人手部在某一时刻的速度V=f(t), 即手部瞬时速 度。反之,给定机器人手部速度,可由V=J(q)q解出相应的关 节速度,q=J-1V,式中J-1为机器人逆速度雅可比矩阵。
第3章 工业机器人静力计算及动力学分析 逆速度雅可比J-1出现奇异解的情况如下:
第3章 工业机器人静力计算及动力学分析 例3-2 由图所示的一个二自由度平面关节机械手,已知手部 端点力F=[Fx Fy]T,求相应于端点力F的关节力矩(不考虑摩 擦)。
F=[Fx Fy]T τ2 Y0 τ1 l1
Θ1
Fy l2
Θ2
F Fx τ2 Θ2=90° X0
X0
l2 Y0 Θ1=0° l1 τ1
变量,即末端操作器的位姿矢量来表示机器人动力学方程。 操作空间动力 学方程如下: (3.28)
工业机器人力学分析

工业机器人力学分析引言工业机器人作为现代制造业中的重要工具,广泛应用于各个领域。
然而,要想实现机器人的精确控制和高效运作,就需要对其力学特性进行深入分析。
本文将从工业机器人运动学、动力学和力控制等方面展开讨论,以期对工业机器人力学的理解能够更为深入。
一、工业机器人运动学分析工业机器人的运动学分析是指通过研究机器人的运动轨迹、关节角度和末端坐标等参数,来描述机器人在空间中的位置和姿态变化。
机器人的运动学分析可基于几何方法,利用三角函数和矩阵运算等数学工具来计算机器人的运动学参数。
其中,举足轻重的是机器人的正运动学问题,即根据给定的关节角度,计算机器人末端执行器的位置和姿态。
正运动学问题主要解决机器人的逆运动学问题,即已知机器人末端执行器的位置和姿态,计算关节角度,实现机器人的自主控制。
二、工业机器人动力学分析工业机器人的动力学分析是指通过研究机器人各个关节上的力和力矩,以及机器人的质量和惯性等参数,来描述机器人在运动过程中所受的力学作用。
机器人的动力学分析可基于牛顿研究动力学的基本定律,通过运用动力学方程和动力学模型,推导出机器人的运动学参数。
动力学分析可以帮助我们理解机器人在复杂工作环境下的受力情况,并为机器人的运动控制提供支持。
三、工业机器人力控制分析工业机器人力控制是指通过对机器人末端执行器的力和力矩进行精确测量和控制,实现机器人对外部物体进行柔和握持、装配和搬运等任务的能力。
力控制在工业机器人领域中起着至关重要的作用,它要求机器人能够根据物体的刚度和形状变化,调整握持力和接触力的大小和方向。
通过传感器和控制系统的结合,工业机器人可以实时感知和调整力量,以适应复杂工作环境和精细操作的需求。
结论工业机器人力学分析是实现机器人精确控制和高效运作的基础。
通过运动学分析,我们可以计算机器人的运动轨迹和关节角度,实现机器人的自主控制。
通过动力学分析,我们可以理解机器人在运动过程中所受的力学作用,并为机器人的运动控制提供支持。
教学课件:第三章-工业机器人静力计算及动力学

动力学模型参数辨识
通过实验数据对工业机器人动力学模型参数进行辨识,以提高模型 精度。
控制器设计
基于工业机器人动力学模型,设计控制器以实现精确的运动控制。
04 工业机器人控制策略
控制策略的原理与分类
原理
控制策略是指导机器人如何响应输入 信号,以实现期望输出的方法。
稳定性和精度。
案例二:工业机器人装配应用
总结词
装配应用是工业机器人应用的另一个重要领域,主要 涉及机器人的定位、抓取、组装和检测等动作。
详细描述
在装配应用中,工业机器人需要具备高精度的定位和 抓取能力,以便能够准确地将零部件组装在一起。为 了实现这一目标,需要对机器人的静力进行计算,以 确保机器人在装配过程中能够承受零部件的重量和摩 擦力等作用力。同时,还需要考虑机器人的动力学特 性,以确保机器人在运动过程中能够快速、准确地完 成装配任务。
03 工业机器人动力学
动力学的概念与原理
01
02
03
动力学定义
动力学是研究物体运动和 力之间关系的科学,包括 运动学和动力学两个部分。
牛顿第二定律
物体加速度与作用力成正 比,与物体质量成反比, 即F=ma。
达朗贝尔原理
任何处于平衡状态的物体 或系统,如果不受外力作 用,将保持静止状态或匀 速直线运动状态。
静力学原理
静力学的基本原理包括力的合成 与分解、力的矩、力的平衡等。 这些原理是解决静力学问题的基 础。
工业机器人的负载分析
负载类型
工业机器人可能承载的负载包括工具负载、附加负载和自重负载。工具负载是 指机器人末端执行器上搭载的工具的重量,附加负载包括电缆、气瓶等其他附 加在机器人上的重量,自重负载则是机器人自身的重量。
第3章工业机器人运动学和动力学概要
第3章工业机器人运动学和动力学机器人操作臂可看成一个开式运动链,它是由一系列连杆通过转动或移动关节串联而成。
开链的一端固定在基座上,另一端是自由的,安装着工具,用以操作物体,完成各种作业。
关节由驱动器驱动,关节的相对运动导致连杆的运动,使手爪到达所需的位姿。
在轨迹规划时,最感兴趣的是末端执行器相对于固定参考系的空间描述。
为了研究机器人各连杆之间的位移关系,可在每个连杆上固接一个坐标系,然后描述这些坐标系之间的关系。
Denavit和Hartenberg提出一种通用方法,用一个4*4的齐次变换矩阵描述相邻两连杆的空间关系,从而推导出“手爪坐标系”相对于“参考系”的等价齐次变换矩阵,建立出操作臂的运动方程。
称之为D-H矩阵法。
3.1 工业机器人的运动学教学时数:4学时教学目标:理解工业机器人的位姿描述和齐次变换;掌握齐次坐标和齐次变换矩阵的运算;理解连杆参数、连杆变换和运动学方程的求解;教学重点:掌握齐次变换及运动学方程的求解教学难点:齐次变换及运算教学方法:讲授教学步骤:齐次变换有较直观的几何意义,而且可描述各杆件之间的关系,所以常用于解决运动学问题。
已知关节运动学参数,求出末端执行器运动学参数是工业机器人正向运动学问题的求解;反之,是工业机器人逆向运动学问题的求解。
3.1.1 工业机器人位姿描述1.点的位置描述在选定的指教坐标系{A}中,空间任一点P的位置可用3*1的位置矢量表示,其左上标代表选定的参考坐标系。
2.点的齐次坐标如果用四个数组成4*1列阵表示三维空间直角坐标系{A}中点P,则该列阵称为三维空间点P的齐次坐标,如下:必须注意,齐次坐标的表示不是惟一的。
我们将其各元素同乘一个非零因子后,仍然代表同一点P,即其中:,,。
该列阵也表示P点,齐次坐标的表示不是惟一的。
3.坐标轴方向的描述用i、j、k分别表示直角坐标系中X、Y、Z坐标轴的单位向量,用齐次坐标来描述X、Y、Z轴的方向,则有,,从上可知,我们规定:4*1列阵中第四个元素为零,且,则表示某轴(某矢量)的方向。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第3章 工业机器人静力计算及动力学分析章节题目:第3章 工业机器人静力计算及动力学分析 [教学内容]3.1 工业机器人速度雅可比与速度分析 3.2 工业机器人力雅可比与静力计算 3.3 工业机器人动力学分析 [教学安排]第3章安排6学时,其中介绍工业机器人速度雅可比45分钟,工业机器人速度分析45分钟,操作臂中的静力30分钟,机器人力雅可比30分钟,机器人静力计算的两类问题10分钟,拉格朗日方程20分钟,二自由度平面关节机器人动力学方程60分钟,关节空间和操作空间动力学30分钟。
通过多媒体课件结合板书的方式,采用课堂讲授和课堂讨论相结合的方法,首先讨论与机器人速度和静力有关的雅可比矩阵,然后介绍工业机器人的静力学问题和动力学问题。
[知识点及其基本要求]1、工业机器人速度雅可比(掌握)2、速度分析(掌握)3、操作臂中的静力(掌握)4、机器人力雅可比(掌握)5、机器人静力计算的两类问题(了解)6、拉格朗日方程(熟悉)7、二自由度平面关节机器人动力学方程(理解) 8、关节空间和操作空间动力学(了解) [重点和难点]重点:1、速度雅可比及速度分析2、力雅可比3、拉格朗日方程4、二自由度平面关节机器人动力学方程 难点:1、关节空间和操作空间动力学 [教学法设计] 引入新课:至今我们对工业机器人运动学方程还只局限于静态位置问题的讨论,还没有涉及力、速度、加速度等。
机器人是一个多刚体系统,像刚体静力学平衡一样,整个机器人系统在外载荷和关节驱动力矩(驱动力)作用下将取得静力平衡;也像刚体在外力作用下发生运动变化一样,整个机器人系统在关节驱动力矩(驱动力)作用下将发生运动变化。
新课讲解: 第一次课第三章 工业机器人静力计算及动力学分析 3-1 工业机器人速度雅可比与速度分析 一、工业机器人速度雅可比假设有六个函数,每个函数有六个变量,即:⎪⎪⎭⎪⎪⎬⎫===),,,,,(),,,,,(),,,,,(654321666543212265432111x x x x x x f y x x x x x x f y x x x x x x f y ,可写成Y=F(X),将其微分,得:⎪⎪⎪⎪⎭⎪⎪⎪⎪⎬⎫∂∂++∂∂+∂∂=∂∂++∂∂+∂∂=∂∂++∂∂+∂∂=666226116666222211226612211111dx x f dx x f dx x f dy dx x f dx x f dx x f dy dx x f dx x f dx x f dy,也可简写成dx X F dY ∂∂=。
该式中(6×6)矩阵XF ∂∂叫做雅可比矩阵。
在工业机器人速度分析和以后的静力分析中都将遇到类似的矩阵,称之为机器人雅可比矩阵,或简称雅可比矩阵。
二自由度平面关节机器人,端点位置x ,y 与关节θ1、θ2的关系为:⎭⎬⎫++=++=)sin(sin )cos(cos 2121121211θθθθθθl l y l l x即:⎭⎬⎫==),(),(2121θθθθy y x x ,将其微分,得:⎪⎪⎩⎪⎪⎨⎧∂∂+∂∂=∂∂+∂∂=22112211θθθθθθθθd y d y dy d xd x dx ,将其写成矩阵形式为: ⎥⎦⎤⎢⎣⎡⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡∂∂∂∂∂∂∂∂=⎥⎦⎤⎢⎣⎡212121θθθθθθd d y y x x dy dx 令⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡∂∂∂∂∂∂∂∂=2121θθθθy y x xJ ,则上式可简写为θd d J X =。
式中:⎥⎦⎤⎢⎣⎡=dy dx d X ;⎥⎦⎤⎢⎣⎡=21θθθd 。
将J 称为该二自由度平面关节机器人的速度雅可比,它反映了关节空间微小运动d θ与手部作业空间微小位移d X 的关系。
若对J 进行运算,,则2R 机器人的雅可比写为:⎥⎦⎤⎢⎣⎡++++-+--=)cos()cos(cos )sin()sin(sin 2122121121221211θθθθθθθθθθl l l l l l J从J 中元素的组成课件,J 阵的值是θ1及θ2的函数。
对于n 自由度机器人的情况,关节变量可用广义关节变量q 表示,q =[q 1 q 2…q n ]T ,当关节为转动关节时,q i =θi ,当关节为移动关节时,q i =d i ,d q =[dq 1 dq 2…dq n ]T 反映了关节空间的微小运动;机器人末端在操作空间的位置和方位可用末端手爪的位姿X 表示,它是关节变量的函数,X =X (q ),并且是一个6维列矢量,d X =[dx dy dz δφx δφy δφz ]T 反映了操作空间的微小运动,它由机器人末端微小线位移和微小角位移组成,因此有:d X =J (q )d q ,式中,J (q )是6×n 的偏导数矩阵,称为n 自由度机器人速度雅可比矩阵。
它的第i 行第j 列元素为:ji ij q x ∂∂=)()(q q J ,I=1,2,…,6;j=1,2,…,n 。
二、工业机器人速度分析对d X =J (q )d q 左右两边各除以dt ,得:dtd dtd q q J X )(=,或qq J V )(=。
式中,V 表示机器人末端在操作空间中的广义速度,XV =,q 表示机器人关节空间中的关节速度,J (q )表示确定关节空间速度q与操作空间速度V 之间关系的雅可比矩阵。
对于2R 机器人来说,J (q )是2×2矩阵。
若令J 1、J 2分别为雅可比的第一列矢量和第二列矢量,则有:2211θθ J J V +=,式中右边第一项表示仅由第一个关节运动引起的端点速度;右边第二项表示仅由第二个关节运动引起的端点速度;总的端点速度为这两个速度矢量的合成。
因此,机器人速度雅可比的每一列表示其它关节不动而某一关节运动产生的端点速度。
前面提到的二自由度机器人的手部速度为:⎥⎦⎤⎢⎣⎡+++++-++-=⎥⎦⎤⎢⎣⎡⎥⎦⎤⎢⎣⎡++++-+--=⎥⎦⎤⎢⎣⎡=22121212112212121211212122121121221211)cos()]cos(cos [)sin()]sin(sin [)cos()cos(cos )sin()sin(sin θθθθθθθθθθθθθθθθθθθθθθθθθθl l l l l l l l l l l l v v V y x 假如已知关节上1θ 及2θ 是时间的函数,)(),(2211t f t f ==θθ ,则可求出该机器人手部在某一时刻的速度V =f(t),即手部瞬时速度。
反之,假如给定机器人手部速度,可解出相应的关节速度:V J q1-= ,式中,1J -称为机器人逆速度雅可比。
通常可以看到机器人逆速度雅可比1J -出现奇异解的两种情况:(1)工作域边界上奇异。
当机器人臂全部伸展开或全部折回而使手部处于机器人工作域的边界上或边界附近时,出现逆雅可比奇异,这时机器人相应的形位叫做奇异形位。
(2)工作域内部奇异。
奇异并不一定发生在工作域边界上,也可以是由两个或更多个关节轴线重合所引起的。
当机器人处在奇异形位时,就会产生退化现象,丧失一个或更多的自由度。
这意味着在空间某个方向(或子域)上,不管机器人关节速度怎样选择,手部也不可能实现移动。
对于在三维空间中作业的一般六自由度工业机器人的情况,机器人速度雅可比J 是一个6×6矩阵,q和V 分别是6×1列阵,即)16()66()16()(⨯⨯⨯=q q J V 。
手部速度矢量V 是由3×1线速度矢量和3×1角速度矢量组合而成的6维列矢量。
关节速度矢量q是由6个关节速度组合而成的6维列矢量。
雅可比矩阵J 的前三行代表手部线速度与关节速度的传递比;后三行代表手部角速度与关节速度的传递比。
而雅可比矩阵J 的每一列则代表相应关节速度i q对手部线速度和角速度的传递比。
第二次课3-2 工业机器人力雅可比与静力计算 一、操作臂中的静力以操作臂中单个杆件为例分析受力,杆件I 通过关节i 和i+1分别于杆件i-1和i+1相连接。
令f i-1,i 及n i-1,i 表示i-1杆通过关节i 作用在i 杆上的力和力矩;f i ,i+1及n i ,i+1表示i 杆通过关节i+1作用在i+1杆上的力和力矩;-f i ,i+1及-n i ,i+1表示i+1杆通过关节i+1作用在i杆上的反作用力和反作用力矩;f n ,n+1及n n ,n+1表示机器人最末杆对外界环境的作用力和力矩;-f n ,n+1及-n n ,n+1表示外界环境对机器人最末杆的作用力和力矩;f 0,1及n 0,1表示机器人底座对杆1的作用力和力矩;m i g 表示连杆i 的重量,作用在质心c i 上。
连杆i 的静力平衡条件为其上所受的合力和合力矩为零,因此力和力矩平衡方程式为:f i-1,i +(-f i,i+1)+m ig =0n i-1,i +(-n i,i+1)+(r i-1,i +r iCi )×f i-1,i +(r iCi )×(-f i,i+1)=0式中,r i-1,i 表示坐标系{i}的原点相对于坐标系{i-1}的位置矢量;r iCi 表示质心相对于坐标系{i}的位置矢量。
假如已知外界环境对机器人最末杆的作用力和力矩,那么可以由最后一个连杆相零连杆(机座)依次递推,从而计算出每个连杆上的受力情况。
为了便于表示机器人手部端点的力和力矩,可将f n ,n+1和n n ,n+1合并写成一个6维矢量:⎥⎦⎤⎢⎣⎡=++1,1,n n n n n f F各关节驱动器的驱动力或力矩可写成一个n 维矢量的形式,即:⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡=n ττττ 21,式中,n 表示关节的个数,τ表示关节力矩(或关节力)矢量,简称广义关节力矩,对转动关节,τi 表示关节驱动力矩;对移动关节,τi 表示关节驱动力。
二、机器人力雅可比假定关节无摩擦,并忽略各杆件的重力,则广义关节力矩τ与机器人手部端点力F 的关系可描述为:τ=J T F ,式中,J T 为n ×6阶机器人力雅可比矩阵或力雅可比。
可用虚功原理证明。
该式表示在静力平衡状态下,手部端点力F 向广义关节力矩τ映射的线性关系。
式中J T 与手部端点力F 和广义关节力矩τ之间的力传递有关,所以叫做机器人力雅可比。
显然,力雅可比J T 正好是机器人速度雅可比J 的转置。
三、机器人静力计算的两类问题从操作臂手部端点力F 与广义关节力矩τ之间的关系式τ=J T F 可知,操作臂静力计算可分为两类问题:(1)已知外界环境对机器人手部作用力F ’(即手部端点力F =-F ’),求相应的满足静力平衡条件的关节驱动力矩τ。
(2)已知关节驱动力矩τ,确定机器人手部对外界环境的作用力F 或符合的质量。