纯电动汽车控制策略.ppt
纯电动轿车整车驱动控制策略开发实践

况下 必须 限制 电机输 出转矩 。驱 动转 矩 的功 率 限 制策 略实 时根 据 三 大 高压 子 系统 状 态 , 计算 蓄 电 池功率 、 电机 功率 及 高压 辅 助 系统 消耗 功率 , 策 上 是通 过减少 高压 辅助 系 统能 量 供 给来 最 大可 能满 足驾驶 员 动力需 求 , 仍 然 能 量供 需不 平 衡 , 策 若 下
制器 的软件部 分 , 是整 车控制 器 的核 心部分 。 本 文着 重讨 论一 款 自主 开发 纯 电动轿 车 的整
图 1 纯电动轿车动力 系统结构示意图
能源 子系 统 由动力 蓄 电池及 其 能源 管理 系统 构成 , 能源 管理 系统 是 实 现 动 力 蓄 电池利 用状 态
监控及 安全保 护 、 能量 再 生等 功能 的关键 部 件 ; 高 压辅 助子 系统 主要 为车 辆 正常 运行 和 人员 舒适 驾 乘提 供 保 障 , 有 动 力 系 统 冷 却 、 气 调 节 等 功 具 空 能: 电机 驱 动 子 系 统 由 电控 系统 、 动 电机 等 组 驱 成 , 将能 源子 系统 输 出 的 电能 转 化 为驱 动 车辆 它 的动 能 , 或将 车辆 的动 能 转 化 为 电能 回收 到 能源 子系统 中 , 纯 电动 轿车 的关键组 成部 分 。 是
系如 图 4所示 。
式 中 : 。 。 为动 力 系 统 过 载 限制 的驾驶 员 尸
期望功率 ; …为驾 驶 员期 望 功率 ( P n为 电机转
速 )P ; 一 d为 蓄 电池 最大 放 电功率 , S C成 正 i 自 与 O 向关 系 ; 为 高 压 辅 助 系统 消耗 功 率 , 括冷 却 P 包 系统及 空调 系统 等 。
电动汽车驱动电机ppt课件

26
第三章
驱动电机系统控制策略简介
驱动电机系统下电流程
27
第三章
驱动电机系统控制策略简介
驱动电机系统驱动模式
整车控制器根据车辆运行的不同情况,包括车速、挡位、电池 SOC值来决定,电机输出扭矩/功率。
当电机控制器从整车控制器处得到扭矩输出命令时,将动力电池 提供的直流电,转化成三相正弦交流电,驱动电机输出扭矩,通过机械 传输来驱动车辆。
9
第二章
驱动电机系统关键部件简介
C33DB 驱动电机控制器结构
10
第二章
驱动电机系统关键部件简介
C33DB 驱动电机控制器结构
11
第二章
驱动电机系统关键部件简介
C33DB 驱动电机控制器主要零件
12
第二章
驱动电机系统关键部件简介
C33DB驱动电机系统工作原理
在驱动电机系统中,驱动电机的输出动作主要是靠控制单元给定命令执 行,即控制器输出命令。控制器主要是将输入的直流电逆变成电压、频 率可调的三相交流电,供给配套的三相交流永磁同步电机使用。
CAN总线接口
29 CAN_SHIELD
10
TH
9
TL
电机温度传感器接口
28
屏蔽层
8
485+
7
485-
RS485总线接口
15 HVIL1(+L1) 26 HVIL2(+L2)
高低压互锁接口
19
第二章
驱动电机系统关键部件简介
检修——驱动电机控制器低压插件
建议检修时先确认插件是否连接到位,是否有“退针”现象。
20
第二章
驱动电机系统关键部件简介
检修——确认高压动力线束连接
纯电动汽车整车控制器(VCU)设计方案
纯电动汽车整车控制器(VCU)设计⽅案纯电动汽车整车控制器设计⽅案书⽬录1 整车控制器控制功能和原理 (1)2 电动汽车动⼒总成分布式⽹络架构 (2)3 整车控制器开发流程 (3)3.1 整车及控制策略仿真 (3)3.2 整车软硬件开发 (4)3.2.1 整车控制器的硬件开发 (5)3.2.2 整车控制器的软件开发 (8)3.3 整车控制器的硬件在环测试 (9)3.4 整车控制器标定 (11)3.4.1 整车控制器的标定系统 (11)3.4.2 电动汽车整车控制器的标定流程 (12)1整车控制器控制功能和原理电动汽车是由多个⼦系统构成的⼀个复杂系统,主要包括电池、电机、变速箱、制动等动⼒系统,以及其它附件如空调、助⼒转向、DCDC及充电机等。
各⼦系统⼏乎都通过⾃⼰的控制单元来完成各⾃功能和⽬标。
为了满⾜整车动⼒性、经济性、安全性和舒适性的⽬标,⼀⽅⾯必须具有智能化的⼈车交互接⼝,另⼀⽅⾯,各系统还必须彼此协作,优化匹配。
因此,纯电动汽车必须需要⼀个整车控制器来管理纯电动汽车中的各个部件。
纯电动车辆以整车控制器为主节点、基于⾼速CAN总线的分布式动⼒系统控制⽹络,通过该⽹络,整车控制器可以对纯电动车辆动⼒链的各个环节进⾏管理、协调和监控,提⾼整车能量利⽤效率,确保车辆安全性和可靠性。
整车控制器的功能如下:1)车辆驾驶:采集司机的驾驶需求,管理车辆的动⼒。
2)⽹络管理:监控通信⽹络,信息调度,信息汇总,⽹关。
3)故障诊断处理:诊断传感器、执⾏器和系统其他部件的故障,并进⾏相应的故障处理,按照标准格式存储故障码。
4)在线配置和维护:通过车载标准CAN端⼝,进⾏控制参数修改,匹配标定,功能配置,监控,基于标准接⼝的调试能⼒等。
5)能量管理:通过对电动汽车车载耗能系统(如空调、电动泵等)的协调和管理,以获得最佳的能量利⽤率。
6)功率分配:通过综合电池的SOC、温度、电压、电流和电机的温度等车辆信息计算电机功率的分配,进⾏车辆的驱动和制动能量回馈控制。
电动汽车驱动电机 ppt课件

PPT课件
16
第二章
驱动电机系统关键部件简介
检修——确认低压信号线束连接
驱动电机低 压接口定义
建议检修时先确认 插件是否连接到位, 是否有“退针”现 象。
连接器型号:Amphenol RTOWO1419NP03
编号
信号名称
说明
A
激励绕阻R1
B
激励绕阻R2
C
余弦绕阻S1
D
余弦绕阻S3
E
正弦绕阻S2
F
PPT课件
5
第二章
驱动电机系统关键部件简介
C33DB 驱动电动机结构
PPT课件
6
第二章
驱动电机系统关键部件简介
C33DB 驱动电动机主要零件
PPT课件
7
第二章
驱动电机系统关键部件简介
C33DB驱动电机控制器采用三相两电平电压源型逆变器
驱动电机系统的控制中心,又称智能功率模块,以IGBT (绝缘栅双极型晶体管)模块为核心,辅以驱动集成电路、主 控集成电路。
对所有的输入信号进行处理,并将驱动电机控制系统运行状 态的信息通过CAN2.0网络发送给整车控制器。驱动电机控制器 内含故障诊断电路。当诊断出异 常时,它将会激活一个错误代码, 发送给整车控制器,同时也会把 存储该故障码和数据。
PPT课件
8
第二章
驱动电机系统关键部件简介
C33DB驱动电机控制器采用三相两电平电压源型逆变器
KTZ3322S02 AK33D XXXXX XXXX 新能源
大洋
KTZ3328S01 BK33D XXXXX XXXX 新能源股份 KTZ3322S02 BK33D XXXXX XXXX 新能源
大郡 大郡
新能源汽车控制策略开发及流程

新能源汽车简述
电控系统开发范围
电控系统开发流程
行驶工况与性能匹配 整车控制与系统仿真 动力和经济性能试验 电控系统开发案例
3
1、新能源汽车简述
1.1 定义
采用新型动力系统,完全或主要依靠新型能源驱动的汽车。新能源汽 车主要包括纯电动汽车、插电式混合动力汽车及燃料电池汽车。
2012年 2009年
以纯电驱动为新能源汽车发展和汽车工业转型的主要战略取向,当前 重点推进纯电动汽车和插电式混合动力汽车产业化。
1.2.3 关键技术
车型 Prouduct 车型级别 轴距(mm) 整车尺寸L×W×H (mm) Class Wheel-base Vehicle Dimension A00 2305 3569×1551×1540 电池包尺寸L×W×H (mm) 电池容量(kWh) Battery Dimension Battery Energy 1282×918×289 18 ROEWE E50 2013 电池:能量存储装置
系统设计 文档
PPEI接口 特性 CAN协议
控制器部 件
设计需求 电气特性 子系统 FMEA
线束 原理图 3D数模
控制器部 件
设计描述 测试计划
线束
可行性报 告
市场调研
接口定义 表 线束原理 图
关键部件 研究
高压线路 框图 低压线路 框图
BOM终稿 系统FNEA
部件开发 计划
SOR CAN网络
目录
质子交换膜 电极催化剂 反应气体供给系统 水热管理
9
1、新能源汽车简述
1.4 燃料电池汽车
1.4.4 结构
纯PEM 燃料电池汽车
纯电动汽车再生制动控制策略研究

再生制动系统工作原理
在制动过程中,电机控制器接收到制动信号后,控制电 机进入发电模式。此时,电机的转子受到车辆惯性的作 用继续旋转,切割定子绕组中的磁感线产生感应电动势 ,从而将车辆的动能转化为电能。这部分电能通过功率 变换器回馈给电池,实现能量的回收。同时,制动控制 器根据制动需求分配制动力,协调再生制动与机械制动 ,确保制动效果和安全。
纯电动汽车以其零排放、低噪音、高效率等 优点受到广泛关注。
再生制动技术是纯电动汽车的关键技术之一 ,能够提高能量利用率和续航里程。
04
研究纯电动汽车再生制动控制策略对于推动 新能源汽车发展具有重要意义。
国内外研究现状及发展趋势
国内外研究现状
目前,国内外学者在纯电动汽车再生制动控制策略方面已经取得了一定的研究成 果,包括基于规则的控制策略、基于优化的控制策略、基于学习的控制策略等。
基于试验设计的参数优化
通过设计合理的试验方案,获取控制策略关键参数对制动 性能、能量回收等目标的影响规律,进而确定参数优化方 向。
灵敏度分析
对控制策略中的关键参数进行灵敏度分析,识别出对制动 性能和能量回收影响显著的参数,为参数优化提供依据。
参数自适应调整
根据车辆实际运行工况和驾驶员操作习惯,实现控制策略 参数的在线自适应调整,提高制动性能和能量回收效率。
基于人工智能技术的控制策略优化
深度学习在控制策略中的应用
利用深度学习技术强大的特征提取和学习能力,构建基于神经网络的再生制动控制策略 模型,实现制动性能和能量回收效率的提升。
强化学习在控制策略中的应用
通过强化学习算法与车辆动力学模型的结合,实现在线学习和自适应调整控制策略参数 ,提高制动性能和能量回收效率。
1.电动汽车整车控制课件

第四章
故障分级及处理方式
15
第四章
故障分级及处理方式
16
整车控制器架构图
第四章
故障分级及处理方式
17
整车CAN总线网关及网络化管理 在整车的网络管理中,整车控制器是信息控制的中心,负责信息的 组织与传输,网络状态的监控,网络节点的管理,信息优先权的动 态分配以及网络故障的诊断与处理等功能。通过CAN(EVBUS)线协 调电池管理系统、电机控制器、空调系统等模块相互通信。
7
驾驶员意图解释 对驾驶员操作信息及控制命令进行分析处理,也就是将驾驶员的 油门信号和制动信号根据某种规则,转化成电机的需求转矩命令。 因而驱动电机对驾驶员操作的 响应性能完全取 决于整车控制的 油门解释结果,直接影响驾驶员的控制效果和操作感觉。
驱动控制 根据驾驶员对车辆的操纵输入(加速踏板、制动踏板以及选档开 关)、车辆状态、道路及环境状况,经分析和处理,向VMS发出相应 的指令,控制电机的驱动转矩来驱动车辆,以满足驾驶员对车辆驱 动的动力性要求;同时根据车辆状态,向VMS发出相应指令,保证安 全性、舒适性。
第四章
故障分级及处理方式
18
基于CCP的在线匹配标定 主要作用是监控ECU工作变量、在线调整ECU的控制参数(包括MAP、 曲线及点参数)、保存标定数据结果以及处理离线数据等。完整 的标定系统包括上位机PC标定程序、PC与ECU通讯硬件连接及ECU 标定驱动程序三个部分。
第四章
故障分级及处理方式
电 动 汽 车 培 训 之 一
天津市优耐特汽车电控技术服务有限公司
讲师:优耐特汽车电控·王征
01 整车控制器硬件 02 第二代整车控制器功能 03 整车控制器功能介绍 04 故障分级及处理方式
电动汽车上下电控制策略

3.2. 快充控制
1)快充唤醒与休眠与慢充相同,此处不做赘述。
BMS快充电唤醒 1
Ready状态
0
主负继电器
0
主正继电器
0
1
预充继电器
0
快充电继电器
0
电池工作模式 VCU上高压电指令
0 1
0
①
②
2 1
③④ ⑤
1 5 3
⑥⑦
图 4 BMS 快充上电时序图
2)快充需求电流:
BMS 给定充电电流每 3S 加 0.05C,BMS 给定充电电流后,会等待响应电流,如果响应电
流未达到给定值,则等待给定电流,以防止充电桩响应电流超调。
3)为兼容快充充电桩,BMS 将充电开始前的绝缘检测,放置到充电过程中,防止充电桩未
完成绝缘检测放电时,导致 BMS 绝缘误报。
4.充电互锁 只要插入充电枪,BMS 都应置位充电插头连接状态,但是只有 CC,CP 同时有 效或 CC2 有效时才允许进入充电模式; 5. CAN 掉线故障的处理 当 BMS 连续 15S 未收到 VCU CAN 指令信息,则认定为通讯超时,BMS 将执 行下电命令,首先将充放电电流逐渐减小至 0(步长:5A/100ms),然后断开主 继电器,该故障为可恢复故障,即通讯恢复时,BMS 恢复正常通讯,但不再接 通主继电器,故障等级三级。
BMS唤醒 1
Ready状态
0
主负继电器
0
主正继电器
0
预充继电器
电池工作模式 VCU上高压电指令
2.下电流程
0 1
0
①
②
1 2 1
③④ ⑤
3
⑥
2.1. 正常下电流程
在 ON 档消失后,BMS 等待 VCU 下电指令,若 15S 未收到 VCU 下电指令,BMS 会强行 下电休眠。
纯电动汽车控制策略
学习任务3 纯电动汽车的控制策略任务目标任务目标能够正确的认识纯电动汽车的控制策略的功用和设计思路。
能够掌握对加速转矩控制策略、制动能回馈控制策略、驱动转矩的功率限制策略的分析方法学习重点对纯电动汽车控制策略的分析和设计。
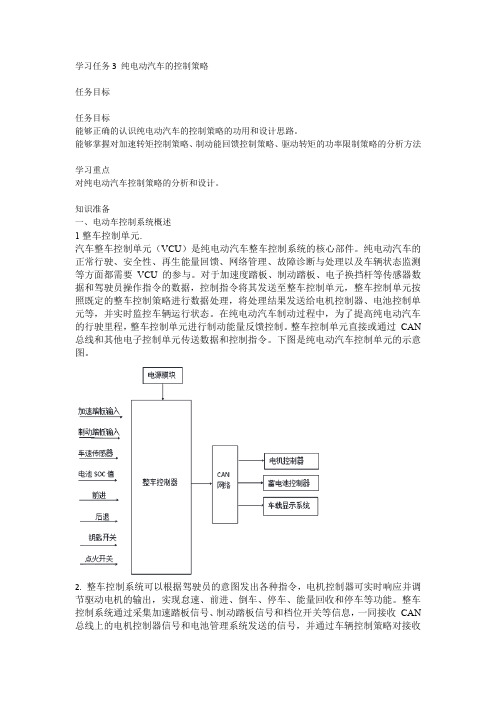
知识准备一、电动车控制系统概述1整车控制单元.汽车整车控制单元(VCU)是纯电动汽车整车控制系统的核心部件。
纯电动汽车的正常行驶、安全性、再生能量回馈、网络管理、故障诊断与处理以及车辆状态监测等方面都需要VCU 的参与。
对于加速度踏板、制动踏板、电子换挡杆等传感器数据和驾驶员操作指令的数据,控制指令将其发送至整车控制单元,整车控制单元按照既定的整车控制策略进行数据处理,将处理结果发送给电机控制器、电池控制单元等,并实时监控车辆运行状态。
在纯电动汽车制动过程中,为了提高纯电动汽车的行驶里程,整车控制单元进行制动能量反馈控制。
整车控制单元直接或通过CAN 总线和其他电子控制单元传送数据和控制指令。
下图是纯电动汽车控制单元的示意图。
2.整车控制系统可以根据驾驶员的意图发出各种指令,电机控制器可实时响应并调节驱动电机的输出,实现怠速、前进、倒车、停车、能量回收和停车等功能。
整车控制系统通过采集加速踏板信号、制动踏板信号和档位开关等信息,一同接收CAN 总线上的电机控制器信号和电池管理系统发送的信号,并通过车辆控制策略对接收到的数据信息进行分析判断,获取驾驶员的驾驶意图和车辆行驶状态,最后利用CAN 总线发出指令,控制各部件控制器的工作,从而保证车辆正常行驶3、整车控制策略的功用纯电动汽车驱动系统中主要有电机驱动装置,传动系统,动力电池等。
必须有一个性能优越、安全可靠的整车控制策略,从各个环节上合理控制车辆的运行状态、能源分配和协调功能,以充分协调和发挥各部分的优势,使汽车整体获得最佳运行状态。
整车控制策略主要包括:(一) 汽车驱动控制。
根据司机的驾驶要求、车辆状态、道路及环境状况,经分析和处理,向电机控制器发出相应指令,满足驾驶要求。
纯电动汽车构造与检修 任务1 整车控制系统基本组成及原理 PPT课件
任务1 整车控制系统基本组成及原理
(三) 车载网络系统
1. 车载网络系统的作用
车载网络系统将可以在实现数据信息共享的同时,按照不同的协议和拓扑结构 将不同系统的信息进行通信与控制,既减少了线束,又可更好地控制和协调汽车的 各个系统,在汽车满足动力性、经济性达到最佳的情况下,提高了汽车的舒适度、 操作方便性。
一、 整车控制系统组成
整车控制系统,是电动汽车的神经中枢,它可以实现对各系统的数据交换、信 息传递、故障诊断、安全监控、驾驶员意图解析、动力蓄电池能量管理等功能。
纯电动汽车的整车控制系统按实现的功能可分为低压电气系统、高压管理系统、 车载网络系统,而实现这些控制功能的整车控制系统的组成部件基本相同,主要由 整车控制器、高压配电装置、DC-DC转换器、子系统控制器、数据总线、驾驶员操 纵传感器、高压互锁、绝缘检测装置(漏电传感器)、低压电源及各种低压辅助电 器等组成。
任务1 整车控制系统基本组成及原理
任务1 整车控制系统基本组成及原理
(八) 驾驶员操纵传感器
1. 挡位传感器
挡位传感器的作用是检测汽车变速杆的位置,并将信号送给整车控制器,为控 制汽车的行驶状态提供必要的信息。
挡位传感器分为接触式和非接触式。
任务1 整车控制系统基本组成及原理
2. 制动踏板位置传感器 (1)制动踏板位置传感器类型
任务1 整车控制系统基本组成及原理
3. 数据总线特点 (1)结构特点
控制总线从结构上简化了硬件设计和系统结构,具有良好的功能和规模扩充性、 系统更新性。
(2)信息传输特点
控制总线具有实时性强、传输距离较远、抗电磁干扰能力强、成本低等优点。
(3)使用特点
控制总线采用双线通信方式,检错能力强,便于故障诊断和维修,并可在高干 扰环境中工作。
纯电动汽车加速过程的转矩优化控制策略
10.16638/ki.1671-7988.2021.04.001纯电动汽车加速过程的转矩优化控制策略马晓楠1,吉春宇2,韦尚军2,覃记荣2,郑伟光1,2(1.桂林电子科技大学机电工程学院,广西桂林541004;2.东风柳州汽车有限公司,广西柳州545005)摘要:针对纯电动汽车在加速过程中电机输出转矩不能准确表达驾驶员驾驶意图的问题,提出了基于模糊控制的转矩优化控制策略。
为了准确识别驾驶员在加速过程中的驾驶意图,建立了以车速偏差和加速踏板开度变化率为输入变量,驾驶意图系数为输出变量的模糊控制器,对驾驶员的加速意图进行识别,并将汽车的加速模式设计为动力模式、一般模式和经济模式3种模式。
动力模式采用硬踏板曲线控制,同时为提高车辆在低速和急加速时的加速性能,增加了基于模糊控制的补偿转矩;一般模式采用线性踏板曲线控制,作为动力模式与经济模式切换的过渡;经济模式采用软踏板曲线控制,提高车辆加速时的经济性。
仿真结果表明:与传统的线性控制策略相比,所研究的转矩优化控制策略能够准确识别驾驶员的驾驶意图,汽车的动力性和经济性都得到了改善。
关键词:纯电动汽车;驾驶意图;模糊控制;转矩优化;补偿转矩中图分类号:U469.72 文献标识码:A 文章编号:1671-7988(2021)04-01-06Torque Optimization Control Strategy for Acceleration Processof Pure Electric VehicleMa Xiaonan1, Ji Chunyu2, Wei Shangjun2, Qin Jirong2, Zheng Weiguang1,2 ( 1.School of mechanical and electrical engineering, Guilin University of Electronic Technology, Guangxi Guilin 541004;2.Dongfeng Liuzhou Motor Co., Ltd, Guangxi Liuzhou 545005 )Abstract: Aiming at the problem that the motor output torque of pure electric vehicle cannot accurately express the driver's driving intention during acceleration, a torque optimization control strategy based on fuzzy control is proposed. In order to accurately identify the driver's driving intention in the process of acceleration, a fuzzy controller with the vehicle speed deviation and the change rate of accelerator pedal opening as the input variable and the driving intention coefficient as the output variable is established to identify the driver's acceleration intention, and the acceleration mode of the car is designed as three modes: power mode, general mode and economic mode. The power mode adopts hard pedal curve control, and in order to improve the acceleration performance of the vehicle at low speed and rapid acceleration, the compensation torque based on fuzzy control is increased; the general mode adopts linear pedal curve control as the transition between power mode and economic mode; the economic mode adopts soft pedal curve control to improve the economy of the vehicle during acceleration. The simulation results show that, compared with the traditional linear control strategy, the torque optimization control strategy can accurately identify the driver's driving intention, and the vehicle's power and economy are improved.Keywords: Pure electric vehicle; Driving intention; Fuzzy control; Torque optimization; Compensation torqueCLC NO.: U469.72 Document Code: A Article ID: 1671-7988(2021)04-01-06作者简介:马晓楠(1996-),山东临沂人,在读硕士研究生,就读于桂林电子科技大学机电工程学院,主要研究方向:纯电动汽车驱动控制研究。
新能源汽车ppt教学课件完整版
市场竞争加剧导致部分实力较弱的企业被 淘汰出局,优势企业逐渐凸显,市场份额
向头部企业集中。
快速发展阶段
随着技术进步和政策扶持力度加大,越来 越多企业涌入新能源汽车市场,产品种类 不断丰富,市场竞争日益激烈。
成熟阶段
市场进入成熟阶段后,竞争格局趋于稳定, 企业之间的竞争转向品牌、技术、服务等 方面。
能源安全
减少石油依赖,提高国家能源安全。
环境保护
产业升级
推动汽车产业向智能化、电动化、网 联化方向发展。
降低汽车尾气排放,改善空气质量。
地方政府推广举措
推广应用
在城市公交、出租车、共享汽车 等领域推广新能源汽车。
充电设施建设
加快充电基础设施建设,提高充电 便利性。
宣传引导
开展新能源汽车知识普及和宣传活 动,提高公众认知度。
场快速发展。
技术创新期待
消费者对新能源汽车技术创新、 性能提升、续航里程等方面有更 高期待,对智能驾驶、车联网等
智能化技术关注度持续提高。
多元化需求
消费者对新能源汽车类型、品牌、 价格等需求呈现多元化趋势,对 个性化定制和差异化服务的需求
也日益明显。
竞争格局演变过程
初期阶段
新能源汽车市场初期以政策驱动为主,少 数企业率先进入市场,竞争格局尚未形成。
功能模块
车联网平台包括数据采集与处理模块、远程监控与诊断模块、智能导航与出行服务模块、车 载娱乐与信息服务模块等。
在新能源汽车中的应用案例
例如,通过车联网平台实现远程监控和诊断,及时发现和解决新能源汽车故障问题;提供智 能导航和出行服务,为新能源汽车用户提供更加便捷的出行体验。
信息安全防护措施
01
02
纯电动汽车PPT课件
借助于电动机在大范围转速变化中所具有的恒功率特性,可用固定档 的齿轮传动装置替代多档变速箱,并缩减了对离合器的需要。减小机 械传动装置的尺寸和重量,且不需要换挡,简化驱动系的控制。
3.2.1 纯电动汽车的传动装置
电动机的力矩变化范围不能满足电动汽车行 驶性能的要求,因此,在电动机和驱动轮之 间需要安装一个机械减速箱或变速箱。
额定功率100kw 峰值功率150kw 最高转速4500rpm 冷却方式:风冷
三挡变速器
最大输入转矩1100 Nm, 静扭安全系数2.5 最高输入转速4500 rpm 最大输入功率150 KW 可靠性达到30万次@ 1100 Nm@1860rpm 变速器噪声79dB@1860rpm 输出端符合无轨电车附加 绝缘连接标准
零排放、零污染、噪声小、结构简单、维修方 便,同时行驶平稳、乘坐舒适、安全性好及驾驶简单轻 便、可使用多种能源、机械结构多样化等。
吉利EC7纯电动汽车
先进的电驱动技术,设计有中里 程(约165km)和长里程(约258km) 两套电池组合,创新的双速大扭 矩变速器实现卓越的效率和性能 。
如果需要,它能依靠150kW电机
3.2.2 电机与AMT传动
传统车AMT系统组成 自动离合器 齿轮式机械变速器 电子控制系统
控制单元输入:
驾驶员意图——加速踏板, 制动踏板,档位的选择;
汽车的工作状态——发动机 转速、节气门开度、车速等。
控制单元根据换挡规律、 离合器控制规律、发动机 节气门自适应调节规律产 生的输出,对节气门开度、 离合器、换挡操作三者进 行综合控制,有效配合。
电机
车轮 机械传动装置
车轮
电机和电源之间的功率流
能量管理系统和车辆控制
纯电动汽车整车控制策略

二、整车控制器功能介绍
电动化辅助系统管理
电动化辅助系统包括电动空调、电制动、电动助力转向。整车控制器应该根据动力 电池以及低压电池状态,对 DC/DC、电动化辅助系统进行监控。
车辆状态的实时监测和显示
整车控制器应该对车辆的状态进行实时检测,并且将各个子系 统的信息发送给车载信息显示系统,其过程是通过传感器和 CAN 总线,检测车辆状态及其 动力系统及相关电器附件相关各 子系统状态信息,驱动显示仪表,将状态信息和 故障诊断信息通 过数字仪表显示出来。
整车控制器在下电前会存储行车过程中发生的故障信息;
三、整车控制器上下电控制C70GB
C70GB采用一键启停按钮,目前定义车辆模式为OFF、ACC、ON,START 四种模式 ➢ 电源模式切换关系:
三、整车控制器上下电控制C70GB
C70GB采用一键启停按钮,目前定义车辆模式为OFF、ACC、ON,START四种模式 ➢ 电源模式对应电器设备状态:
驱动控制 根据驾驶员对车辆的操纵输入(加速踏板、制动踏板以及选档开关)、车辆状态、道路及环境状况,经分析和处 理,向 VMS发出相应的指令,控制电机的 驱动转矩来驱动车辆,以满足驾驶员对车辆驱动的动力性要求;同时根 据车辆状态,向 VMS发出相应指令,保证安全性、舒适性。
制动能量回馈控制 整车控制器根据加速踏板和制动踏板的开度、车辆行驶状态信息以及动力电池的状态信息(如 SOC 值)来判 断某一时刻能否进行制动能量回馈, 在满足安全性能、制动性能以及驾驶员舒适性的前提下,回收能部分能量。 包括滑行制动和刹车制动过程中的电机制动转矩控制。
电动转向 控制器
变速箱 控制器
高速CAN
TM 电机控制器
ISG 电机控制器
BMS
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
2. 3 驱动转矩的功率限制策略
该策略是为了保护能源系统、电机驱动系统及整车安全运行。
在能源系统能量不足时,若整车控制器强制按照驾驶员期望转矩,极 易引起能源系统自保高压断电或损坏能源系统,造成事故,因此在这种情况 下必须限制电机输出转矩。驱动转矩的功率限制策略实时根据三大高压子 系统状态,计算蓄电池功率、电机功率及高压辅助系统消耗功率,上策是 通过减少高压辅助系统能量供给来最大可能满足驾驶员动力需求,若仍然 能量供需不平衡,下策就是限制电机功率需求 。
(二) 制动能量回馈控制。根据制动踏板和加速踏板信息、车辆行驶 状态信息、蓄电池状态信息,计算再生制动力矩,向电机控制器发出 指令。
(三) 整车能量优化管理。通过对车载能源动力系统的管理,提高整 车能量利用效率,延长纯电动汽车的续驶里程。
(四) 车辆状态显示。对车辆某些信号进行采集和转换,由主控制器 通过综合数字仪表显示出来。
1.3 整车驱动控制策略的分析与设计
车辆需要在满足驾驶员意图,汽车的动力性、平顺性和其他基本 技术性能以及成本控制等要求的前提下选择合适的控制策略。针对各 部件的特性及汽车的运行工况,控制策略要实现能量在电机、电池之 间的合理而有效分配、使整车 系统效率达到最高,获得整车最大的经 济性以及平稳的驾驶性能。在设计纯电动汽车的时候,首先要在保证 汽车基本性能的前提下降低汽车的能量消耗,提高车辆的续驶里程。 同时还要兼顾电池的寿命,并充分考虑驾驶员的驾驶意图、汽车的平 顺性以及安全性。
纯电动汽车整车驱动控制策略
纯电动汽车作为一种节能 、无污染的理想“零 排放 ”汽车 ,是 21 世纪汽车工业重要的发展趋势 。 随 着环保及节能意识的增强 , 纯电动汽车的开发 和应用日益受到世界各主要汽车生产国和大型汽 车企业的 重视 。
整车控制器是纯电动汽车运行的核心单元 , 担负着整车驱动控制 、能量管理 、整车安全及故障 诊 断和信息处理等功能 ,是实现纯电动汽车安全 、 高效运行的必要保障 。整车控制策略作为整车控制器的 软件部分 ,是整车控制器的核心部分 。
2. 2 制动能回馈控制策略
在车速很低的爬行区,回馈 能量与回馈路径能量损耗基本 相抵,回馈效率很低且会明显 影响驾驶员制动感觉,故不进 行制动能量回馈 。在低速区,电 机具有一定转速,施以较低制 动转矩,尽量回收制动能量。 高速区时车辆惯性动能很高, 可以施加较高制动转矩而不影 响驾驶员制动感觉。但由于缺 少制动踏板开度信号,该策略 的再生制动所占总制动比例较 小,具体数值通过实车标定得 到。为了保护动力蓄电池,回 馈电流不能超过蓄电池最大充 电电流,SOC过高时取消电机 再生制动 ,因为很容易导致电池 电压过高而且电池充电难度也
转矩控制策略可以实现加速转矩控制、制动能量回馈、驱动转矩的功 率限制等主要功能以及驻坡、怠速爬行、WTO 转矩补偿、跛行回家等辅 助驱动功能。
2. 1 加速转矩控制策略
加速形成不同的加速转矩控制策略。如图2所 示, 曲线1、2和3分别表示3种加速踏板处理策略 。
1.2 整车驱动控制策略的分析与设计
纯电动汽车驱动系统中主要有电机驱动装置,传动系统,动力电 池等。必须有一个性能优越、安全可靠的整车控制策略,从各个环节 上合理控制车辆的运行状态、能源分配和协调功能,以充分协调和发 挥各部分的优势,使汽车整体获得最佳运行状态。整车控制策略主要 包括:
(一) 汽车驱动控制。根据司机的驾驶要求、车辆状态、道路及环境 状况,经分析和处理,向电机控制器发出相应指令,满足驾驶要求。
基于上述原则,制定控制策略的思路为: 实时考虑行驶工况,电池 SOC值等影响因素,根据规则将转矩合理地分配给电机。同时限定电
1.4 整车驱动控制策略的分析与设计
整车驱动控制策略的核心是根据驾驶员动作分析其驾驶意图,并综合考 虑动力系统状态,计算驾驶员对电机的期望转矩,然后向电机驱动系统 发出指令,使纯电动轿车的行驶状态尽可能快速、准确地达到工况要求 和满足驾驶员的驾驶目的。
1.1 纯电动汽车动力系统结构
纯电动汽车主要由三个子系统组成: 电驱动系统、能源系统和辅助系统。
电力驱动子系统包括电子控制器、功 率转换器、电机、机械传动装置。能源子 系统包括能源及能量管理系统。辅助系统 包括助力转向单元、温控单元和辅助动力 供给单元等。根据驾驶者从加速踏板和制 动踏板发出的信号,电子控制器发出相应 的控制信号以控制功率转换器功率器件的 开关。
2. 2 制动能回馈控制策略
制动能量回馈是电动汽车(包括纯电动车、混合动力车和插电式燃料电池车) 的标志性功能。制动能量回馈控制的原则是在最大程度提高能量回馈的同时, 确保电制动与机械制动的协调控制,以保证汽车制动力的要求。
考虑到本项目车机械制动系统不可调整,而且只有制动踏板开关传感器, 实施了纯软件的轻度制动能量回馈控制策略。制动踏板踩下时,回馈制动功能 激活,回馈制动转矩与车速的函数关系如图4所示 。
功率转换器的作用是调节电机和能源 间的能源流。能量的回流是因为纯电动汽 车制动能量的再生,该能量被能量源吸收。 应指出的是多数纯电动汽车的电池、超级 电容器和飞轮都能吸收制动再生能量。
能量管理单元与电子控制器一起控制 可再生制动,从而实现系统能量流的最优 化。能量管理单元控制能量并监测能源的 使用情况。辅助动力供给系统向所有的纯 电动汽车辅助装置提供不同电压的电源。
曲线1反映了一种硬踏板策略,能够 满足驾驶员中高负荷的驾驶感觉, 但低负荷时操控性不好。曲线3反映 了一种软踏板策略,车辆加速感觉 整体偏软,但低负荷操控性较好。 曲线2是一种线性踏板策略,能够反 映踏板实际位置,控制效果介于曲 线1和3之间。
2. 1 加速转矩控制策略
结合电机的外特性曲线,就可以得到纯电动车的动力特性图,即加速转矩 MAP, 如图3所示。最下部曲线是加速踏板回零时的电机滑行制动转矩,模拟 传统车发动机的倒拖阻转矩,并转化为电能储存到蓄电池中 。