坐标系与参数方程知识点
高中数学选修4—4(坐标系与参数方程)知识点总结

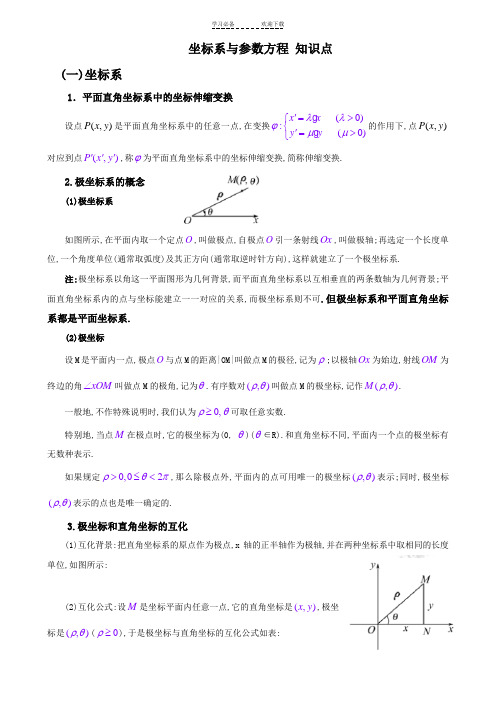
坐标系与参数方程知识点1.平面直角坐标系中的坐标伸缩变换设点P(x,y)是平面直角坐标系中的任意一点,在变换(0):(0)x xy y的作用下,点P(x,y)对应到点(,)P x y,称为平面直角坐标系中的坐标伸缩变换,简称伸缩变换.2.极坐标系的概念(1)极坐标系如图所示,在平面内取一个定点O,叫做极点,自极点O引一条射线Ox,叫做极轴;再选定一个长度单位,一个角度单位(通常取弧度)及其正方向(通常取逆时针方向),这样就建立了一个极坐标系.注:极坐标系以角这一平面图形为几何背景,而平面直角坐标系以互相垂直的两条数轴为几何背景;平面直角坐标系内的点与坐标能建立一一对应的关系,而极坐标系则不可.但极坐标系和平面直角坐标系都是平面坐标系.(2)极坐标设M是平面内一点,极点O与点M的距离|OM|叫做点M的极径,记为;以极轴Ox为始边,射线OM为终边的角xOM叫做点M的极角,记为.有序数对(,)叫做点M的极坐标,记作(,)M.一般地,不作特殊说明时,我们认为0,可取任意实数.特别地,当点M在极点时,它的极坐标为(0,)(∈R).和直角坐标不同,平面内一个点的极坐标有无数种表示.如果规定0,02,那么除极点外,平面内的点可用唯一的极坐标(,)表示;同时,极坐标(,)表示的点也是唯一确定的.3.极坐标和直角坐标的互化(1)互化背景:把直角坐标系的原点作为极点,x轴的正半轴作为极轴,并在两种坐标系中取相同的长度单位,如图所示:(2)互化公式:设M是坐标平面内任意一点,它的直角坐标是(,)x y,极坐标是(,)(0),于是极坐标与直角坐标的互化公式如表:点M直角坐标(,)x y极坐标(,)互化公式cossinxy222tan(0)x yyxx在一般情况下,由tan确定角时,可根据点M所在的象限最小正角.4.常见曲线的极坐标方程曲线图形极坐标方程圆心在极点,半径为r的圆(02) r圆心为(,0)r,半径为r的圆2cos()22 r圆心为(,)2r,半径为r的圆2sin(0) r过极点,倾斜角为的直线(1)()()R R 或(2)(0)(0)和过点(,0)a ,与极轴垂直的直线cos()22a 过点(,)2a ,与极轴平行的直线sin(0)a 注:由于平面上点的极坐标的表示形式不唯一,即(,),(,2),(,),(,),都表示同一点的坐标,这与点的直角坐标的唯一性明显不同.所以对于曲线上的点的极坐标的多种表示形式,只要求至少有一个能满足极坐标方程即可.例如对于极坐标方程,点(,)44M 可以表示为5(,2)(,2),444444或或(-)等多种形式,其中,只有(,)44的极坐标满足方程.二、参数方程1.参数方程的概念一般地,在平面直角坐标系中,如果曲线上任意一点的坐标,x y 都是某个变数t 的函数()()x f t yg t ①,并且对于t 的每一个允许值,由方程组①所确定的点(,)M x y 都在这条曲线上,那么方程①就叫做这条曲线的参数方程,联系变数,x y 的变数t 叫做参变数,简称参数,相对于参数方程而言,直接给出点的坐标间关系的方程叫做普通方程.2.参数方程和普通方程的互化(1)曲线的参数方程和普通方程是曲线方程的不同形式,一般地可以通过消去参数而从参数方程得到普通方程.(2)如果知道变数,x y 中的一个与参数t 的关系,例如()x f t ,把它代入普通方程,求出另一个变数与参数的关系()y g t ,那么()()x f t yg t 就是曲线的参数方程,在参数方程与普通方程的互化中,必须使,x y 的取值范围保持一致.注:普通方程化为参数方程,参数方程的形式不一定唯一。
坐标系和与参数方程
坐标系和与参数方程
知识点一(参数方程化普通方程)
【知识梳理】
参数方程:
(1)一般地,在平面直角坐标系中,如果曲线C 上任何一点P 的坐标x 和y 都可以表示为
某个变量t 特色函数: ⎩⎨⎧==)()(t g y t f x ;反过来,对于t 的每个允许值,由函数式⎩⎨⎧==)
()
(t g y t f x ,所确定
的点P (x ,y ) 都在曲线C 上 ,那么方程⎩
⎨⎧==)()
(t g y t f x 叫作曲线C 的 参数方程 ,变量t 是参变
数,简称参数。
相对于参数方程而言,直接给出 点的坐标间关系 的方程叫做普通方程,参数方程可以转化为普通方程。
(2)参数方程中参数可以有物理意义、几何意义、也可以没有明显意义。
参数方程与xy 方程的互相转换:
曲线的参数方程可以通过消去参数而得到普通方程;若知道变数x 、y 中的一个与参数t 的
3cos θ.
2C 与3C 交点的直角坐标;1C 与2C 相交于点
【课堂练习】
1.已知曲线C 的极坐标方程2cos ρθ=,以极点为原点,极轴为轴的正半轴建立直角坐标
系,则曲线C 的参数方程为 .
在直角坐标系xOy 中,以坐标原点为极点,x 轴正半轴为极轴建立极坐标系,半圆C 的极坐
标方程为2cos ρθ=,0,2θπ⎡⎤∈⎢⎥⎣⎦
. (1)求C 的参数方程;
(2)设点D 在C 上,C 在D 处的切线与直线:32l y x =+垂直,根据(1)中你得到的参数方程,确定D 的坐标.
一、参数方程化普通方程
二、普通方程化参数方程
三、极坐标方程化直角坐标方程
四、直角坐标方程化极坐标方程
五、参数方程与极坐标方程的互化。
(完整版)坐标系与参数方程知识点
坐标系与参数方程 知识点1.平面直角坐标系中的坐标伸缩变换设点P(x,y)是平面直角坐标系中的任意一点,在变换(0):(0)x xy yλλϕμμ'=>⎧⎨'=>⎩g g 的作用下,点P(x,y)对应到点(,)P x y ''',称ϕ为平面直角坐标系中的坐标伸缩变换,简称伸缩变换.2.极坐标系的概念 (1)极坐标系如图所示,在平面内取一个定点O ,叫做极点,自极点O 引一条射线Ox ,叫做极轴;再选定一个长度单位,一个角度单位(通常取弧度)及其正方向(通常取逆时针方向),这样就建立了一个极坐标系.注:极坐标系以角这一平面图形为几何背景,而平面直角坐标系以互相垂直的两条数轴为几何背景;平面直角坐标系内的点与坐标能建立一一对应的关系,而极坐标系则不可.但极坐标系和平面直角坐标系都是平面坐标系.(2)极坐标设M 是平面内一点,极点O 与点M 的距离|OM|叫做点M 的极径,记为ρ;以极轴Ox 为始边,射线OM 为终边的角xOM ∠叫做点M 的极角,记为θ.有序数对(,)ρθ叫做点M 的极坐标,记作(,)M ρθ.一般地,不作特殊说明时,我们认为0,ρ≥θ可取任意实数. 特别地,当点M 在极点时,它的极坐标为(0, θ)(θ∈R).和直角坐标不同,平面内一个点的极坐标有无数种表示.如果规定0,02ρθπ>≤<,那么除极点外,平面内的点可用唯一的极坐标(,)ρθ表示;同时,极坐标(,)ρθ表示的点也是唯一确定的.3.极坐标和直角坐标的互化(1)互化背景:把直角坐标系的原点作为极点,x 轴的正半轴作为极轴,并在两种坐标系中取相同的长度单位,如图所示:(2)互化公式:设M 是坐标平面内任意一点,它的直角坐标是(,)x y ,极坐标是(,)ρθ(0ρ≥),于是极坐标与直角坐标的互化公式如表:点M直角坐标(,)x y极坐标(,)ρθ互化公式cos sin x y ρθρθ=⎧⎨=⎩222tan (0)x y yx xρθ=+=≠ 在一般情况下,由tan θ确定角时,可根据点M 所在的象限最小正角. 4.常见曲线的极坐标方程曲线 图形 极坐标方程圆心在极点,半径为r 的圆(02)r ρθπ=≤<圆心为(,0)r ,半径为r 的圆2cos ()22r ππρθθ=-≤<圆心为(,)2r π,半径为r 的圆2sin (0)r ρθθπ≤<过极点,倾斜角为α的直线(1)()()R R θαρθπαρ=∈=+∈或 (2)(0)(0)θαρθπαρ=≥=+≥和过点(,0)a ,与极轴垂直的直线cos ()22a ππρθθ=-<<过点(,)2a π,与极轴平行的直线sin (0)a ρθθπ=<<注:由于平面上点的极坐标的表示形式不唯一,即(,),(,2),(,),(,),ρθρπθρπθρπθ+-+--+都表示同一点的坐标,这与点的直角坐标的唯一性明显不同.所以对于曲线上的点的极坐标的多种表示形式,只要求至少有一个能满足极坐标方程即可.例如对于极坐标方程,ρθ=点(,)44M ππ可以表示为5(,2)(,2),444444ππππππππ+-或或(-)等多种形式,其中,只有(,)44ππ的极坐标满足方程ρθ=.二、参数方程 1.参数方程的概念一般地,在平面直角坐标系中,如果曲线上任意一点的坐标,x y 都是某个变数t 的函数()()x f t y g t =⎧⎨=⎩①,并且对于t 的每一个允许值,由方程组①所确定的点(,)M x y 都在这条曲线上,那么方程①就叫做这条曲线的参数方程,联系变数,x y 的变数t 叫做参变数,简称参数,相对于参数方程而言,直接给出点的坐标间关系的方程叫做普通方程.2.参数方程和普通方程的互化(1)曲线的参数方程和普通方程是曲线方程的不同形式,一般地可以通过消去参数而从参数方程得到普通方程.(2)如果知道变数,x y 中的一个与参数t 的关系,例如()x f t =,把它代入普通方程,求出另一个变数与参数的关系()y g t =,那么()()x f t y g t =⎧⎨=⎩就是曲线的参数方程,在参数方程与普通方程的互化中,必须使,x y 的取值范围保持一致.注:普通方程化为参数方程,参数方程的形式不一定唯一。
选修4-4坐标系与参数方程-知识点总结

坐标系与参数方程 知识点(一)坐标系1.平面直角坐标系中的坐标伸缩变换设点(,)P x y 是平面直角坐标系中的任意一点,在变换(0):(0)x xy yλλϕμμ'=>⎧⎨'=>⎩的作用下,点(,)P x y 对应到点(,)P x y ''',称ϕ为平面直角坐标系中的坐标伸缩变换,简称伸缩变换.2.极坐标系的概念(1)极坐标系如图所示,在平面内取一个定点O ,叫做极点,自极点O 引一条射线Ox ,叫做极轴;再选定一个长度单位,一个角度单位(通常取弧度)及其正方向(通常取逆时针方向),这样就建立了一个极坐标系.注:极坐标系以角这一平面图形为几何背景,而平面直角坐标系以互相垂直的两条数轴为几何背景;平面直角坐标系内的点与坐标能建立一一对应的关系,而极坐标系则不可.但极坐标系和平面直角坐标系都是平面坐标系.(2)极坐标设M 是平面内一点,极点O 与点M 的距离|OM|叫做点M 的极径,记为ρ;以极轴Ox 为始边,射线OM 为终边的角xOM ∠叫做点M 的极角,记为θ.有序数对(,)ρθ叫做点M 的极坐标,记作(,)M ρθ.一般地,不作特殊说明时,我们认为0,ρ≥θ可取任意实数.特别地,当点M 在极点时,它的极坐标为(0, θ)(θ∈R).和直角坐标不同,平面内一个点的极坐标有无数种表示.如果规定0,02ρθπ>≤<,那么除极点外,平面内的点可用唯一的极坐标(,)ρθ表示;同时,极坐标(,)ρθ表示的点也是唯一确定的.3.极坐标和直角坐标的互化(1)互化背景:把直角坐标系的原点作为极点,x 轴的正半轴作为极轴,并在两种坐标系中取相同的长度单位,如图所示:(2)互化公式:设M 是坐标平面内任意一点,它的直角坐标是(,)x y ,极坐标是(,)ρθ(0ρ≥),于是极坐标与直角坐标的互化公式如表:点M直角坐标(,)x y 极坐标(,)ρθ互化公式cos sin x y ρθρθ=⎧⎨=⎩222tan (0)x y yx x ρθ⎧=+⎪⎨=≠⎪⎩在一般情况下,由tan θ确定角时,可根据点M 所在的象限最小正角.4.常见曲线的极坐标方程曲线图形极坐标方程圆心在极点,半径为r 的圆(02)r ρθπ=≤<圆心为(,0)r ,半径为r 的圆2cos ()22r ππρθθ=-≤<圆心为(,)2r π,半径为r 的圆2sin (0)r ρθθπ=≤<圆心为(,)2r π,半径为r 的圆2sin (0)r ρθθπ=≤<过极点,倾斜角为α的直线(1)()()R R θαρθπαρ=∈=+∈或(2)(0)(0)θαρθπαρ=≥=+≥和过点(,0)a ,与极轴垂直的直线cos ()22a ππρθθ=-<<过点(,)2a π,与极轴平行的直线sin (0)a ρθθπ=<<注:由于平面上点的极坐标的表示形式不唯一,即(,),(,2),(,),(,),ρθρπθρπθρπθ+-+--+都表示同一点的坐标,这与点的直角坐标的唯一性明显不同.所以对于曲线上的点的极坐标的多种表示形式,只要求至少有一个能满足极坐标方程即可.例如对于极坐标方程,ρθ=点(,)44M ππ可以表示为5(,2)(,2),444444ππππππππ+-或或(-)等多种形式,其中,只有(,)44ππ的极坐标满足方程ρθ=. 5.圆与直线一般极坐标方程(1)圆的极坐标方程若圆的圆心为 00(,)M ρθ,半径为r ,求圆的极坐标方程。
(完整版)高中数学选修4—4(坐标系与参数方程)知识点总结
坐标系与参数方程知识点1 •平面直角坐标系中的坐标伸缩变换设点P(x,y)是平面直角坐标系中的任意一点 ,在变换:% g (°)的作用 y gy (°)下,点P(x,y)对应到点P (x ,y ),称为平面直角坐标系中的坐标伸缩变换,简称伸缩变2.极坐标系的概念线Ox ,叫做极轴;再选定一个长度单位,一个角度单位(通常取弧度)及其正方向(通常取逆 时针方向),这样就建立了一个极坐标系•注:极坐标系以角这一平面图形为几何背景,而平面直角坐标系以互相垂直的两条数轴为几何背景;平面直角坐标系内的点与坐标能建立一一对应的关系 ,而极坐标系则不可•但极坐标系和平面直角坐标系都是平面坐标系•(2)极坐标设M 是平面内一点,极点0与点M 的距离|0M|叫做点M 的极径,记为;以极轴Ox 为始 边,射线0M 为终边的角 xOM 叫做点M 的极角,记为•有序数对(,)叫做点M 的极坐标,记作M( , )•般地,不作特殊说明时,我们认为°,可取任意实数特别地,当点M 在极点时,它的极坐标为(0, )( € R).和直角坐标不同,平面内一个 点的极坐标有无数种表示如果规定0,0 2 ,那么除极点外,平面内的点可用唯一的极坐标(,)表示;同时,极坐标(,)表示的点也是唯一确定的3.极坐标和直角坐标的互化0,叫做极点,自极点0引一条射(1)极坐标系在平面内取一个定点(1)互化背景:把直角坐标系的原点作为极点,x轴的正半轴作为极轴,并在两种坐标系中取相同的长度单位,如图所示:⑵互化公式:设M是坐标平面内任意一点,它的直角坐标是(x, y),极坐标是(,)(0),于是极坐标与直角坐标的互化公式如表:在一般情况下,由确定角时,可根据点所在的象限最小正角注:由于平面上点的极坐标的表示形式不唯一,即(,),(,2 ),(, ),(, ),都表示同一点的坐标,这与点的直角坐标的唯一性明显不同.所以对于曲线上的点的极坐标的多种表示形式,只要求至少有一个能满足极坐标方程即可.例如对于极坐标方程,点M(,)可以表示为4 45(, 2 )或(, 2 )或(-, ——)等多种形式,其中,只有(,)的极坐标满足方4 4 4 4 4 4 4 4程二、参数方程1.参数方程的概念一般地,在平面直角坐标系中,如果曲线上任意一点的坐标x, y都是某个变数t的函数x f (t)①,并且对于t的每一个允许值,由方程组①所确定的点M (x,y)都在这条曲线上y g(t)那么方程①就叫做这条曲线的参数方程,联系变数x,y的变数t叫做参变数,简称参数,相对于参数方程而言,直接给出点的坐标间关系的方程叫做普通方程.2.参数方程和普通方程的互化(1)曲线的参数方程和普通方程是曲线方程的不同形式,一般地可以通过消去参数而从参数方程得到普通方程•(2)如果知道变数 x, y 中的一个与参数t 的关系,例如x f (t),把它代入普通方程,求 出另一个变数与参数的关系y g(t),那么 X f (t)就是曲线的参数方程,在参数方程与y g(t)普通方程的互化中,必须使x,y 的取值范围保持一致•注:普通方程化为参数方程,参数方程的形式不一定唯一。
坐标系与参数方程_知识点总结

坐标系与参数方程_知识点总结一、坐标系1.直角坐标系直角坐标系是最常见的坐标系,在平面上由两个垂直的坐标轴组成,分别为x轴和y轴。
一个点在直角坐标系中的位置可以用坐标(x,y)来表示,其中x为横坐标,y为纵坐标。
2.极坐标系3.球坐标系球坐标系是一种用于描述空间点位置的坐标系统,它由径向距离、极角和方位角组成。
一个点的位置可以用有序数组(r,θ,φ)来表示,其中r为点到原点的距离,θ为点与一些固定轴的夹角,φ为点的方位角。
二、参数方程1.一维参数方程一维参数方程是指由一个参数确定的直线或曲线的方程。
例如,一个点在直线上的一维参数方程可以表示为x=f(t),其中x为点在直线上的位置,t为参数,f(t)为关于参数t的函数。
2.二维参数方程二维参数方程是指由两个参数确定的平面曲线的方程。
一个点在平面上的位置可以表示为(x(t),y(t)),其中x(t)和y(t)分别为关于参数t的函数。
二维参数方程常用于描述曲线、圆、椭圆等几何图形。
3.三维参数方程三维参数方程是指由三个参数确定的空间曲线的方程。
一个点在空间中的位置可以表示为(x(t),y(t),z(t)),其中x(t)、y(t)和z(t)分别为关于参数t的函数。
三维参数方程常用于描述空间曲线、曲面等几何图形。
三、坐标系与参数方程的关系坐标系和参数方程之间存在着密切的关系。
在直角坐标系中,一个函数的参数方程可以通过将x和y用参数表示来得到,即将x=f(t)和y=g(t)的参数方程转化为直角坐标系中的函数y=f(x)的形式。
反之,一个函数的直角坐标系方程也可以通过将x和y用参数表示来得到参数方程。
参数方程在极坐标系和球坐标系中也可以通过类似的方式转化。
总结:坐标系是描述点的位置的系统,常见的坐标系有直角坐标系、极坐标系和球坐标系。
参数方程是用参数表示的函数方程,常用于描述直线、曲线、曲面等几何图形。
坐标系和参数方程之间存在密切的关系,可以通过转化将一个方程从坐标系表示转化为参数方程,反之亦然。
坐标系与参数方程(知识总结)

坐标系与参数方程【要点知识】一、坐标系1.平面直角坐标系中的伸缩变换设点(,)P x y 是平面直角坐标系xOy 中的任意一点,在变换(0):(0)x x y y λλϕμμ'=>⎧⎨'=>⎩的作用下,点(,)P x y 对应到点(,)P x y ''',我们把ϕ称为平面直角坐标系xOy 中的坐标伸缩变换,简称伸缩变换.2.极坐标系〔1〕极坐标系的概念如下图,在平面内取一个定点O ,叫做极点;自极点O 引一条射线Ox ,叫做极轴;再选定一个长度单位,一个角度单位〔通常取弧度〕及其正方向〔通常取逆时针方向〕,这样我们就建立了一个极坐标系.〔2〕极坐标设点M 是平面内一点,极点O 与点M 的距离叫做点M 的极径,记为ρ;以极轴Ox 为始边,射线OM 为终边的xOM ∠叫做点M 的极角,记为θ. 我们把有序数对(,)ρθ叫做点M 的极坐标,记为(,)M ρθ. 〔3〕极径、极角的取值范围一般地,极径0ρ≥,极角R θ∈.3.极坐标与直角坐标之间的互化如下图,设点M 是平面内任意一点,记点M 的直角坐标为(,)x y ,极坐标为(,)ρθ. 我们可以得到极坐标与直角坐标之间如下关系:〔ⅰ〕直角坐标化极坐标:cos x ρθ=,sin y ρθ=; 〔ⅱ〕极坐标化直角坐标:222x y ρ=+,tan yxθ=〔0x ≠〕.【注】上面两类关系式是我们进行极坐标与直角坐标互化的重要关系式. 解题时,大家要根据题意灵活选用.4.几个简单曲线的极坐标方程〔1〕圆的极坐标方程:圆心在(,0)C a 〔0a >〕,半径为a 的圆的极坐标方程为2cos a ρθ=;〔2〕直线的极坐标方程:经过极点,从极轴到直线的角是4π的直线l 的极坐标方程为4πθ=和54πθ=.5.柱坐标系与球坐标系 〔1〕柱坐标系如下图,建立空间直角坐标系Oxyz ,设点P 是空间中任意一点,它在Oxy 平面上的射影为点Q ,用(,)ρθ〔0ρ≥,02θπ≤<〕表示点Q 在Oxy 平面上的极坐标,这时点P 的位置可用有序数组(,,)z ρθ〔z R ∈〕表示. 我们把建立上述对应关系的坐标系叫做柱坐标系;相应地,把有序数组(,,)z ρθ叫做点P 的柱坐标,记作(,,)P z ρθ,其中0ρ≥,02θπ≤<,z R ∈.【注】直角坐标与柱坐标互化的变换公式: 〔2〕球坐标系如下图,建立空间直角坐标系Oxyz ,设点P 是空间中任意一点,连结OP ,记OPr =,OP 与Oz 轴正向所夹的角为ϕ,设点P 在Oxy 平面上的射影为点Q ,Ox 轴按逆时针方向旋转到OQ 时所转过的正角为θ,这样点P 的位置就可以用有序数组(,,)r ϕθ表示. 我们把建立上述对应关系的坐标系叫做球坐标系〔或空间极坐标系〕;相应地,把有序数组(,,)r ϕθ叫做点P 的球坐标,记作(,,)P r ϕθ,其中0r ≥,0ϕπ≤≤,02θπ≤<.【注】直角坐标与球坐标互化的变换公式:cos cos cos sin sin x r y r z r θϕθϕθ=⎧⎪=⎨⎪=⎩二、参数方程1.参数方程的概念一般地,在平面直角坐标系中,如果曲线上任意一点的坐标x ,y 都是某个变数t 的函数()()x f t y g t =⎧⎨=⎩①,并且对于t 的每一个允许值,由方程组①所确定的点(,)P x y 都在这条曲线上,那么我们就把方程组①叫做这条曲线的参数方程,而把联系变数x ,y 的变数t 叫做参变数,简称参数.2.参数方程与普通方程之间的互化曲线的参数方程与普通方程是曲线方程的两种不同形式. 一般地,可以通过消去参数,由参数方程得到普通方程;反之,如果变数x ,y 中的一个与参数t 的关系,例如()x f t =,那么我们可以通过把它代入普通方程,求出另一个变数与参数的关系()y g t =,由此得到的方程组()()x f t y g t =⎧⎨=⎩就是该曲线的参数方程.【注】在解决参数方程与普通方程互化的问题时,必须要使x ,y 的取值范围保持一致.3.几个简单曲线的参数方程〔1〕圆的参数方程:圆心在原点O ,半径为r 的圆的参数方程为cos sin x r y r θθ=⎧⎨=⎩〔θ为参数〕;〔2〕椭圆的参数方程:中心在原点O ,焦点在x 轴上的椭圆的参数方程为cos sin x a y b ϕϕ=⎧⎨=⎩〔ϕ为参数〕;〔3〕双曲线的参数方程:中心在原点O ,焦点在x 轴上的双曲线的参数方程为sec tan x a y b ϕϕ=⎧⎨=⎩〔ϕ为参数〕,这里,sec ϕ是ϕ的正割函数,并且1sec cos ϕϕ=; 〔4〕抛物线的参数方程:以原点O 为顶点,以x 轴为对称轴,开口向右的抛物线22y px =〔0p >〕〔不包括原点〕的参数方程为22tan 2tan p x p y αα⎧=⎪⎪⎨⎪=⎪⎩〔α为参数〕;〔5〕直线的参数方程:过点000(,)M x y ,倾斜角为α〔2πα≠〕的直线l 的参数方程为00cos sin x x t y y t αα=+⎧⎨=+⎩〔t 为参数〕;〔6〕渐开线的参数方程:(cos sin )(sin cos )x r y r ϕϕϕϕϕϕ=+⎧⎨=-⎩〔ϕ为参数〕;〔7〕摆线的参数方程:(sin )(1cos )x r y r ϕϕϕ=-⎧⎨=-⎩〔ϕ为参数〕.。
坐标系与参数方程_知识点
坐标系与参数方程 知识点一、极坐标与极坐标系1.平面直角坐标系中的坐标伸缩变换设点P(x,y)是平面直角坐标系中的任意一点,在变换(0):(0)x x y yλλϕμμ'=⋅>⎧⎨'=⋅>⎩的作用下,点P(x,y)对应到点(,)P x y ''',称ϕ为平面直角坐标系中的坐标伸缩变换,简称伸缩变换.2.极坐标系的概念 (1)极坐标系如图所示,在平面内取一个定点O ,叫做极点,自极点O 引一条射线Ox ,叫做极轴;再选定一个长度单位,一个角度单位(通常取弧度)及其正方向(通常取逆时针方向),这样就建立了一个极坐标系.注:极坐标系以角这一平面图形为几何背景,而平面直角坐标系以互相垂直的两条数轴为几何背景;平面直角坐标系内的点与坐标能建立一一对应的关系,而极坐标系则不可.但极坐标系和平面直角坐标系都是平面坐标系.(2)极坐标设M 是平面内一点,极点O 与点M 的距离|OM|叫做点M 的极径,记为ρ;以极轴Ox 为始边,射线OM 为终边的角xOM ∠叫做点M 的极角,记为θ.有序数对(,)ρθ叫做点M 的极坐标,记作(,)M ρθ.一般地,不作特殊说明时,我们认为0,ρ≥θ可取任意实数.特别地,当点M 在极点时,它的极坐标为(0, θ)(θ∈R).和直角坐标不同,平面内一个点的极坐标有无数种表示.如果规定0,02ρθπ>≤<,那么除极点外,平面内的点可用唯一的极坐标(,)ρθ表示;同时,极坐标(,)ρθ表示的点也是唯一确定的.3.极坐标和直角坐标的互化(1)互化背景:把直角坐标系的原点作为极点,x 轴的正半轴作为极轴,并在两种坐标系中取相同的长度单位,如图所示:(2)互化公式:设M 是坐标平面内任意一点,它的直角坐标是(,)x y ,极坐标是(,)ρθ(0ρ≥),于是极坐标与直角坐标的互化公式如表:点M 直角坐标(,)x y 极坐标(,)ρθ互化公式cos sin x y ρθρθ=⎧⎨=⎩222tan (0)x y yx xρθ=+=≠ 在一般情况下,由tan θ确定角时,可根据点M 所在的象限最小正角. 4.常见曲线的极坐标方程曲线 图形 极坐标方程圆心在极点,半径为r的圆(02)r ρθπ=≤<圆心为(,0)r ,半径为r的圆2cos ()22r ππρθθ=-≤<圆心为(,)2r π,半径为r的圆2sin (0)r ρθθπ≤<过极点,倾斜角为α的直线(1)()()R R θαρθπαρ=∈=+∈或 (2)(0)(0)θαρθπαρ=≥=+≥和过点(,0)a ,与极轴垂直的直线cos ()22a ππρθθ=-<<过点(,)2a π,与极轴平行的直线sin (0)a ρθθπ=<<注:由于平面上点的极坐标的表示形式不唯一,即(,),(,2),(,),(,),ρθρπθρπθρπθ+-+--+都表示同一点的坐标,这与点的直角坐标的唯一性明显不同.所以对于曲线上的点的极坐标的多种表示形式,只要求至少有一个能满足极坐标方程即可.例如对于极坐标方程,ρθ=点(,)44M ππ可以表示为5(,2)(,2),444444ππππππππ+-或或(-)等多种形式,其中,只有(,)44ππ的极坐标满足方程ρθ=.二、参数方程 1.参数方程的概念一般地,在平面直角坐标系中,如果曲线上任意一点的坐标,x y 都是某个变数t 的函数()()x f t y g t =⎧⎨=⎩①,并且对于t 的每一个允许值,由方程组①所确定的点(,)M x y 都在这条曲线上,那么方程①就叫做这条曲线的参数方程,联系变数,x y 的变数t 叫做参变数,简称参数,相对于参数方程而言,直接给出点的坐标间关系的方程叫做普通方程.2.参数方程和普通方程的互化(1)曲线的参数方程和普通方程是曲线方程的不同形式,一般地可以通过消去参数而从参数方程得到普通方程.(2)如果知道变数,x y 中的一个与参数t 的关系,例如()x f t =,把它代入普通方程,求出另一个变数与参数的关系()y g t =,那么()()x f t y g t =⎧⎨=⎩就是曲线的参数方程,在参数方程与普通方程的互化中,必须使,x y 的取值范围保持一致.注:普通方程化为参数方程,参数方程的形式不一定唯一。
坐标系与参数方程知识点总结
坐标系与参数方程 知识点(一)坐标系1.平面直角坐标系中的坐标伸缩变换设点(,)P x y 是平面直角坐标系中的任意一点,在变换(0):(0)x xy yλλϕμμ'=>⎧⎨'=>⎩的作用下,点(,)P x y 对应到点(,)P x y ''',称ϕ为平面直角坐标系中的坐标伸缩变换,简称伸缩变换.2.极坐标系的概念(1)极坐标系如图所示,在平面内取一个定点O ,叫做极点,自极点O 引一条射线Ox ,叫做极轴;再选定一个长度单位,一个角度单位(通常取弧度)及其正方向(通常取逆时针方向),这样就建立了一个极坐标系.注:极坐标系以角这一平面图形为几何背景,而平面直角坐标系以互相垂直的两条数轴为几何背景;平面直角坐标系内的点与坐标能建立一一对应的关系,而极坐标系则不可.但极坐标系和平面直角坐标系都是平面坐标系.(2)极坐标设M 是平面内一点,极点O 与点M 的距离|OM|叫做点M 的极径,记为ρ;以极轴Ox 为始边,射线OM 为终边的角xOM ∠叫做点M 的极角,记为θ.有序数对(,)ρθ叫做点M 的极坐标,记作(,)M ρθ.一般地,不作特殊说明时,我们认为0,ρ≥θ可取任意实数. 特别地,当点M 在极点时,它的极坐标为(0, θ)(θ∈R).和直角坐标不同,平面内一个点的极坐标有无数种表示.如果规定0,02ρθπ>≤<,那么除极点外,平面内的点可用唯一的极坐标(,)ρθ表示;同时,极坐标(,)ρθ表示的点也是唯一确定的.3.极坐标和直角坐标的互化(1)互化背景:把直角坐标系的原点作为极点,x 轴的正半轴作为极轴,并在两种坐标系中取相同的长度单位,如图所示:(2)互化公式:设M 是坐标平面内任意一点,它的直角坐标是(,)x y ,极坐标是(,)ρθ(0ρ≥),于是极坐标与直角坐标的互化公式如表:在一般情况下,由tan θ确定角时,可根据点M 所在的象限最小正角.4.常见曲线的极坐标方程注:由于平面上点的极坐标的表示形式不唯一,即(,),(,2),(,),(,),ρθρπθρπθρπθ+-+--+都表示同一点的坐标,这与点的直角坐标的唯一性明显不同.所以对于曲线上的点的极坐标的多种表示形式,只要求至少有一个能满足极坐标方程即可.例如对于极坐标方程,ρθ=点(,)44M ππ可以表示为5(,2)(,2),444444ππππππππ+-或或(-)等多种形式,其中,只有(,)44ππ的极坐标满足方程ρθ=. 5.圆与直线一般极坐标方程(1)圆的极坐标方程若圆的圆心为 00(,)M ρθ,半径为r ,求圆的极坐标方程。
坐标系与参数方程知识点汇总

坐标系与参数方程知识点汇总知识点一 坐标系(一)、平面直角坐标系中的坐标伸缩变换设点(,)P x y 是平面直角坐标系中的任意一点,在变换,(0),:,(0).x x y y λλϕμμ'=⋅>⎧⎨'=⋅>⎩的作用下,点(,)P x y 对应到点(,)P x y ''',称ϕ为平面直角坐标系中的坐标伸缩变换.(二)、极坐标系的有关概念1.极坐标系如图,在平面内取一个定点O ,叫做极点;从O 点引一条射线Ox ,叫做极轴;再选定一个长度单位、角度单位(通常取弧度)及其正方向(通常取逆时针方向为正方向),这样就确定了一个平面极坐标系,简称极坐标系.2.极坐标(1)极径:设M 是平面内任意一点,极点O 与点M 的距离|OM |叫做点M 的极径,记为ρ;(2)极角:以极轴Ox 为始边,射线OM 为终边的∠xOM 叫做点M 的极角,记为θ.(3)极坐标:有序数对(ρ,θ)称为点M 的极坐标,记作M (ρ,θ).(三)、直角坐标与极坐标的互化把直角坐标系的原点作为极点,x 轴正半轴作为极轴,并在两坐标系中取相同的长度单位.设M 是平面内的任意一点,它的直角坐标是(x ,y ),极坐标是(ρ,θ),则它们间的关系为:1.直角坐标化为极坐标: 222,tan (0).y x y x xρθ=+=≠ 2.极坐标化为直角坐标:cos ,sin .x y ρθρθ==(四、)直线的极坐标方程 1.直线l 过极点,且极角为,则直线l 的极坐标方程是:,()R θαρ=∈. 化为直角坐标方程为:y=tan .x2.过点(,0)(0)A a a >,且垂直于极轴的直线l 的极坐标方程是:cos a ρθ=. 化为直角坐标方程为:x=a .3.过点M (b ,π2),且平行于极轴的直线l 的极坐标方程是:ρsin θ=b . 化为直角坐标方程为:y=b.(五)、圆的极坐标方程αα1.圆心在极点,半径为r 的圆的极坐标方程是:r ρ=;直角坐标方程为:x 2+y 2=a 22. 圆心在极轴以上的点(,0),(0)C a a >处,且过极点O 的圆的极坐标方程 是:2cos a ρθ=;直角坐标方程为:(x -a )2+y 2=a 23.圆心在点(,),(0)2C a a π>处,且过极点O 的圆的极坐标方程是:2sin a ρθ=. 直角坐标方程为:x 2+(y -a )2=a 2知识点二 参数方程(一)、曲线的参数方程在平面直角坐标系中,如果曲线上任意一点的坐标(,)x y 都是某个变数t 的函数(),().x f t y g t =⎧⎨=⎩并且对于t 的每一个允许值,由这个方程所确定的点(,)M x y 都在这条曲线上,那么这个方程组就叫做这条曲线的参数方程,联系,x y 之间的变数t 叫做参变数,简称参数.(二)、直线的参数方程1.过点000(,)M x y ,倾斜角为α的直线l 的参数方程为00cos ,(sin .x x t t y y t αα=+⎧⎨=+⎩为参数). (三)、圆的参数方程1.圆222()()x a y b r -+-=的参数方程可表示为cos ,(sin .x a r y b r θθθ=+⎧⎨=+⎩为参数).(四)、椭圆的参数方程 1.椭圆22221,(0)x y a b a b +=>>的参数方程可表示为cos ,(sin .x a y b ϕϕϕ=⎧⎨=⎩为参数). (五)、抛物线的参数方程1. 抛物线22(0)y px p =>的参数方程可表示为22,(2.x pt t y pt ⎧=⎨=⎩为参数). (六)、参数方程与普通方程的互化1.将参数方程化为普通方程:消去参数常用代入法、加减消元法、三角恒等变换。
坐标系与参数方程_知识点总结
坐标系与参数方程1.平面直角坐标系中的坐标伸缩变换设点P(x,y)是平面直角坐标系中的任意一点,在变换的作用下,点P(x,y)对应到点,称为平面直角坐标系中的坐标伸缩变换,简称伸缩变换.2。
极坐标系的概念(1)极坐标系如图所示,在平面内取一个定点,叫做极点,自极点引一条射线,叫做极轴;再选定一个长度单位,一个角度单位(通常取弧度)及其正方向(通常取逆时针方向),这样就建立了一个极坐标系。
注:(i)极坐标系以角这一平面图形为几何背景,而平面直角坐标系以互相垂直的两条数轴为几何背景;(ii)平面直角坐标系内的点与坐标能建立一一对应的关系,而极坐标系则不可.但极坐标系和平面直角坐标系都是平面坐标系.(2)极坐标设M是平面内一点,极点与点M的距离|OM|叫做点M的极径,记为;以极轴为始边,射线为终边的角叫做点M的极角,记为.有序数对叫做点M的极坐标,记作.一般地,不作特殊说明时,我们认为可取任意实数.特别地,当点M在极点时,它的极坐标为(0,)(∈R).和直角坐标不同,平面内一个点的极坐标有无数种表示.如果规定,那么除极点外,平面内的点可用唯一的极坐标表示;同时,极坐标表示的点也是唯一确定的.3。
极坐标和直角坐标的互化(1)互化背景:把直角坐标系的原点作为极点,x轴的正半轴作为极轴,并在两种坐标系中取相同的长度单位,如图所示:(2)互化公式:设是坐标平面内任意一点,它的直角坐标是,极坐标是(),于是极坐标与直角坐标的互化公式如下:极坐标直角坐标:直角坐标极坐标:在一般情况下,由确定角时,可根据点所在的象限最小正角.4。
常见曲线的极坐标方程注:由于平面上点的极坐标的表示形式不唯一,即都表示同一点的坐标,这与点的直角坐标的唯一性明显不同.所以对于曲线上的点的极坐标的多种表示形式,只要求至少有一个能满足极坐标方程即可。
例如对于极坐标方程点可以表示为等多种形式,其中,只有的极坐标满足方程.5。
极坐标方程与直角坐标方程之间的互化(1)直角坐标方程极坐标方程:(2)极坐标方程直角坐标方程:二、参数方程1.参数方程的概念一般地,在平面直角坐标系中,如果曲线上任意一点的坐标都是某个变数的函数①,并且对于的每一个允许值,由方程组①所确定的点都在这条曲线上,那么方程①就叫做这条曲线的参数方程,联系变数的变数叫做参变数,简称参数,相对于参数方程而言,直接给出点的坐标间关系的方程叫做普通方程.2.参数方程和普通方程的互化(1)曲线的参数方程和普通方程是曲线方程的不同形式,一般地可以通过消去参数而从参数方程得到普通方程.(2)如果知道变数中的一个与参数的关系,例如,把它代入普通方程,求出另一个变数与参数的关系,那么就是曲线的参数方程,在参数方程与普通方程的互化中,必须使的取值范围保持一致.注:普通方程化为参数方程,参数方程的形式不一定唯一。
坐标系与参数方程-知识点
坐标系与参数方程-知识点坐标系与参数方程 知识点1.平面直角坐标系中的坐标伸缩变换设点P(x,y)是平面直角坐标系中的任意一点,在变换(0):(0)x xy yλλϕμμ'=⋅>⎧⎨'=⋅>⎩的作用下,点P(x,y)对应到点(,)P x y ''',称ϕ为平面直角坐标系中的坐标伸缩变换,简称伸缩变换.2.极坐标系的概念 (1)极坐标系如图所示,在平面内取一个定点O,叫做极点,自极点O 引一条射线Ox ,叫做极轴;再选定一个长度单位,一个角度单位(通常取弧度)及其正方向(通常取逆时针方向),这样就建立了一个极坐标系.注:极坐标系以角这一平面图形为几何背景,而平面直角坐标系以互相垂直的两条数轴为几何背景;平面直角坐标系内的点与坐标能建立一一对应的关系,而极坐标系则不可.但极坐标系和平面直角坐标系都是平面坐标系.(2)极坐标设M 是平面内一点,极点O 与点M 的距离|OM|叫做点M 的极径,记为ρ;以极轴Ox 为始边,射线OM 为终边的角xOM∠叫做点M 的极角,记为θ.有序数对(,)ρθ叫做点M 的极坐标,记作(,)M ρθ. 一般地,不作特殊说明时,我们认为0,ρ≥θ可取任意实数.特别地,当点M 在极点时,它的极坐标为(0, θ)(θ∈R).和直角坐标不同,平面内一个点的极坐标有无数种表示.如果规定0,02ρθπ>≤<,那么除极点外,平面内的点可用唯一的极坐标(,)ρθ表示;同时,极坐标(,)ρθ表示的点也是唯一确定的.3.极坐标和直角坐标的互化 (1)互化背景:把直角坐标系的原点作为极点,x 轴的正半轴作为极轴,并在两种坐标系中取相同的长度单位,如图所示:(2)互化公式:设M 是坐标平面内任意一点,它的直角坐标是(,)x y ,极坐标是(,)ρθ(0ρ≥),于是极坐标与直角坐标的互化公式如表:在一般情况下,由tanθ确定角时,可根据点M所在的象限最小正角.4.常见曲线的极坐标方程注:由于平面上点的极坐标的表示形式不唯一,即(,),(,2),(,),(,),ρθρπθρπθρπθ+-+--+都表示同一点的坐标,这与点的直角坐标的唯一性明显不同.所以对于曲线上的点的极坐标的多种表示形式,只要求至少有一个能满足极坐标方程即可.例如对于极坐标方程,ρθ=点(,)44M ππ可以表示为5(,2)(,2),444444ππππππππ+-或或(-)等多种形式,其中,只有(,)44ππ的极坐标满足方程ρθ=.1.参数方程的概念一般地,在平面直角坐标系中,如果曲线上任意一点的坐标,x y 都是某个变数t 的函数()()x f t y g t =⎧⎨=⎩①,并且对于t 的每一个允许值,由方程组①所确定的点(,)M x y 都在这条曲线上,那么方程①就叫做这条曲线的参数方程,联系变数,x y 的变数t 叫做参变数,简称参数,相对于参数方程而言,直接给出点的坐标间关系的方程叫做普通方程.2.参数方程和普通方程的互化(1)曲线的参数方程和普通方程是曲线方程的不同形式,一般地可以通过消去参数而从参数方程得到普通方程.(2)如果知道变数,x y 中的一个与参数t 的关系,例如()x f t =,把它代入普通方程,求出另一个变数与参数的关系()y g t =,那么()()x f t y g t =⎧⎨=⎩就是曲线的参数方程,在参数方程与普通方程的互化中,必须使,x y 的取值范围保持一致.注:普通方程化为参数方程,参数方程的形式不一定唯一。
(整理)坐标系与参数方程知识点.

坐标系与参数方程 知识点1.平面直角坐标系中的坐标伸缩变换设点P(x,y)是平面直角坐标系中的任意一点,在变换(0):(0)x xy yλλϕμμ'=>⎧⎨'=>⎩的作用下,点P(x,y)对应到点(,)P x y ''',称ϕ为平面直角坐标系中的坐标伸缩变换,简称伸缩变换.2.极坐标系的概念 (1)极坐标系如图所示,在平面内取一个定点O ,叫做极点,自极点O 引一条射线Ox ,叫做极轴;再选定一个长度单位,一个角度单位(通常取弧度)及其正方向(通常取逆时针方向),这样就建立了一个极坐标系.注:极坐标系以角这一平面图形为几何背景,而平面直角坐标系以互相垂直的两条数轴为几何背景;平面直角坐标系内的点与坐标能建立一一对应的关系,而极坐标系则不可.但极坐标系和平面直角坐标系都是平面坐标系.(2)极坐标设M 是平面内一点,极点O 与点M 的距离|OM|叫做点M 的极径,记为ρ;以极轴Ox 为始边,射线OM 为终边的角xOM ∠叫做点M 的极角,记为θ.有序数对(,)ρθ叫做点M 的极坐标,记作(,)M ρθ.一般地,不作特殊说明时,我们认为0,ρ≥θ可取任意实数. 特别地,当点M 在极点时,它的极坐标为(0, θ)(θ∈R).和直角坐标不同,平面内一个点的极坐标有无数种表示.如果规定0,02ρθπ>≤<,那么除极点外,平面内的点可用唯一的极坐标(,)ρθ表示;同时,极坐标(,)ρθ表示的点也是唯一确定的.3.极坐标和直角坐标的互化(1)互化背景:把直角坐标系的原点作为极点,x 轴的正半轴作为极轴,并在两种坐标系中取相同的长度单位,如图所示:(2)互化公式:设M 是坐标平面内任意一点,它的直角坐标是(,)x y ,极坐标是(,)ρθ(0ρ≥),于是极坐标与直角坐标的互化公式如表:在一般情况下,由tan θ确定角时,可根据点M 所在的象限最小正角. 4.常见曲线的极坐标方程注:由于平面上点的极坐标的表示形式不唯一,即(,),(,2),(,),(,),ρθρπθρπθρπθ+-+--+都表示同一点的坐标,这与点的直角坐标的唯一性明显不同.所以对于曲线上的点的极坐标的多种表示形式,只要求至少有一个能满足极坐标方程即可.例如对于极坐标方程,ρθ=点(,)44M ππ可以表示为5(,2)(,2),444444ππππππππ+-或或(-)等多种形式,其中,只有(,)44ππ的极坐标满足方程ρθ=.二、参数方程 1.参数方程的概念一般地,在平面直角坐标系中,如果曲线上任意一点的坐标,x y 都是某个变数t 的函数()()x f t y g t =⎧⎨=⎩①,并且对于t 的每一个允许值,由方程组①所确定的点(,)M x y 都在这条曲线上,那么方程①就叫做这条曲线的参数方程,联系变数,x y 的变数t 叫做参变数,简称参数,相对于参数方程而言,直接给出点的坐标间关系的方程叫做普通方程.2.参数方程和普通方程的互化(1)曲线的参数方程和普通方程是曲线方程的不同形式,一般地可以通过消去参数而从参数方程得到普通方程.(2)如果知道变数,x y 中的一个与参数t 的关系,例如()x f t =,把它代入普通方程,求出另一个变数与参数的关系()y g t =,那么()()x f t y g t =⎧⎨=⎩就是曲线的参数方程,在参数方程与普通方程的互化中,必须使,x y 的取值范围保持一致.注:普通方程化为参数方程,参数方程的形式不一定唯一。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
坐标系与参数方程 知识点
1.平面直角坐标系中的坐标伸缩变换
设点P(x,y)是平面直角坐标系中的任意一点,在变换(0):(0)
x x
y y
λλϕμμ'=>⎧⎨
'=>⎩g g 的作用
下,点P(x,y)对应到点(,)P x y ''',称ϕ为平面直角坐标系中的坐标伸缩变换,简称伸缩变换.
2.极坐标系的概念 (1)极坐标系
如图所示
,在平面内取一个定点O ,叫做极点,自极点O 引一条射
线Ox ,叫做极轴;再选定一个长度单位,一个角度单位(通常取弧度)及其正方向(通常取逆时针方向),这样就建立了一个极坐标系.
注:极坐标系以角这一平面图形为几何背景,而平面直角坐标系以互相垂直的两条数轴为几何背景;平面直角坐标系内的点与坐标能建立一一对应的关系,而极坐标系则不可.但极坐标系和平面直角坐标系都是平面坐标系.
(2)极坐标
设M 是平面内一点,极点O 与点M 的距离|OM|叫做点M 的极径,记为ρ;以极轴Ox 为始边,射线OM 为终边的角xOM ∠叫做点M 的极角,记为θ.有序数对(,)ρθ叫做点M 的极坐标,记作(,)M ρθ.
一般地,不作特殊说明时,我们认为0,ρ≥θ可取任意实数. 特别地,当点M 在极点时,它的极坐标为(0, θ)(θ∈R).和直角坐标不同,平面内一个
点的极坐标有无数种表示.
如果规定0,02ρθπ>≤<,那么除极点外,平面内的点可用唯一的极坐标(,)ρθ表示;同时,极坐标(,)ρθ表示的点也是唯一确定的.
3.极坐标和直角坐标的互化
(1)互化背景:把直角坐标系的原点作为极点,x 轴的正半轴作为极轴,并在两种坐标系中取相同的长度单位,如图所示
:
(2)互化公式:设M 是坐标平面内任意一点,它的直角坐标是(,)x y ,极坐标是
(,)ρθ(0ρ≥),于是极坐标与直角坐标的互化公式如表:
点M
直角坐标(,)x y
极坐标(,)ρθ
互化公式
cos sin x y ρθ
ρθ=⎧⎨
=⎩
222
tan (0)x y y
x x
ρθ=+=
≠ 在一般情况下,由tan θ确定角时,可根据点M 所在的象限最小正角. 4.常见曲线的极坐标方程
曲线 图形 极坐标方程
圆心在极点,半径为r 的圆
(02)r ρθπ=≤<
圆心为(,0)r ,半径为r 的圆
2cos ()2
2
r π
π
ρθθ=-
≤<
圆心为(,
)2
r π
,半
径为r 的圆
2sin (0)r ρθθπ≤<
过极点,倾斜角为
α的直线
(1)()()R R θαρθπαρ=∈=+∈或 (2)(0)(0)θαρθπαρ=≥=+≥和
过点(,0)a ,与极轴垂直的直线
cos ()2
2
a π
π
ρθθ=-
<<
过点(,
)2
a π,与极
轴平行的直线
sin (0)a ρθθπ=<<
注:由于平面上点的极坐标的表示形式不唯一,即
(,),(,2),(,),(,),ρθρπθρπθρπθ+-+--+都表示同一点的坐标,这与点的直角坐标的
唯一性明显不同.所以对于曲线上的点的极坐标的多种表示形式,只要求至少有一个能满足极坐标方程即可.例如对于极坐标方程,ρθ=点(
,)44
M ππ
可以表示为5(,2)(,2),444444ππππππππ+-或或(-)等多种形式,其中,只有(,)44
ππ的极坐标满足方程ρθ=.
二、参数方程 1.参数方程的概念
一般地,在平面直角坐标系中,如果曲线上任意一点的坐标,x y 都是某个变数t 的函数
()
()x f t y g t =⎧⎨
=⎩
①,并且对于t 的每一个允许值,由方程组①所确定的点(,)M x y 都在这条曲线上,那么方程①就叫做这条曲线的参数方程,联系变数,x y 的变数t 叫做参变数,简称参数,相对于参数方程而言,直接给出点的坐标间关系的方程叫做普通方程.
2.参数方程和普通方程的互化
(1)曲线的参数方程和普通方程是曲线方程的不同形式,一般地可以通过消去参数而从
参数方程得到普通方程.
(2)如果知道变数,x y 中的一个与参数t 的关系,例如()x f t =,把它代入普通方程,求
出另一个变数与参数的关系()y g t =,那么()
()x f t y g t =⎧⎨
=⎩
就是曲线的参数方程,在参数方程与
普通方程的互化中,必须使,x y 的取值范围保持一致.
注:普通方程化为参数方程,参数方程的形式不一定唯一。
应用参数方程解轨迹问题,关键在于适当地设参数,如果选用的参数不同,那么所求得的曲线的参数方程的形式也不同。
3.圆的参数
如图所示,设圆O 的半径为r ,点M 从初始位置0M 出发,按逆时针方向在圆O 上作匀速圆周运动,设(,)M x y ,则cos ()sin x r y r θ
θθ
=⎧⎨
=⎩为参数。
这就是圆心在原点O ,半径为r 的圆的参数方程,其中θ的几何意义是0OM 转过的角度。
圆心为(,)a b ,半径为r 的圆的普通方程是2
2
2
()()x a y b r -+-=,
它的参数方程为:cos ()sin x a r y b r θ
θθ
=+⎧⎨
=+⎩为参数。
4.椭圆的参数方程
以坐标原点O 为中心,焦点在x 轴上的椭圆的标准方程为22
221(0),x y a b a b
+=>>其参
数方程为cos ()sin x a y b ϕ
ϕϕ=⎧⎨
=⎩
为参数,其中参数ϕ称为离心角;焦点在y 轴上的椭圆的标准方
程是22
221(0),y x a b a b +=>>其参数方程为cos (),sin x b y a ϕϕϕ
=⎧⎨=⎩为参数其中参数ϕ仍为离心
角,通常规定参数ϕ的范围为ϕ∈[0,2π)。
注:椭圆的参数方程中,参数ϕ的几何意义为椭圆上任一点的离心角,要把它和这一点的旋转角α区分开来,除了在四个顶点处,离心角和旋转角数值可相等外(即在0到2π的范围内),在其他任何一点,两个角的数值都不相等。
但当02
πα≤≤
时,相应地也有
02
π
ϕ≤≤
,在其他象限内类似。
5.双曲线的参数方程
以坐标原点O 为中心,焦点在x 轴上的双曲线的标准议程为22
221(0,0),
x y a b a b
-=>>其参数方程为sec ()tan x a y b ϕϕϕ
=⎧⎨
=⎩为参数,其中3[0,2),.22ππ
ϕπϕϕ∈≠≠
且 焦点在y 轴上的双曲线的标准方程是22
221(0,0),y x a b a b
-=>>其参数方程为
cot ((0,2).csc x b e y a ϕ
ϕϕπϕπϕ=⎧∈≠⎨
=⎩
为参数,其中且 以上参数ϕ都是双曲线上任意一点的离心角。
6.抛物线的参数方程
以坐标原点为顶点,开口向右的抛物线2
2(0)y px p =>的参数方程为
2
2().2x pt t y pt
⎧=⎨
=⎩为参数 7.直线的参数方程
经过点000(,)M x y ,倾斜角为()2
π
αα≠
的直线l 的普通方程是00tan (),
y y x x α-=-而过000(,)M x y ,倾斜角为α的直线l 的参数方程为00cos sin x x t y y t α
α
=+⎧⎨
=+⎩()t 为参数。
注:直线参数方程中参数的几何意义:过定点000(,)M x y ,倾斜角为α的直线l 的参数
方程为00cos sin x x t y y t α
α=+⎧⎨
=+⎩
()t 为参数,其中t 表示直线l 上以定点0M 为起点,任一点(,)M x y 为终点的有向线段0M M u u u u u u r
的数量,当点M 在0M 上方时,t >0;当点M 在0M 下
方时,t <0;当点M 与0M 重合时,t =0。
我们也可以把参数t 理解为以0M 为原点,直线l 向上的方向为正方向的数轴上的点M 的坐标,其单位长度与原直角坐标系中的单位长度相同。