叶菜类钵苗移栽机的研制 挑战杯文本 (1)
蔬菜钵苗行星轮系栽植器设计与运动学分析的开题报告
蔬菜钵苗行星轮系栽植器设计与运动学分析的开题报告一、课题研究背景和意义现代人们在追求健康饮食和养生的同时,越来越注重蔬菜的摄入量。
为了满足市场需求,越来越多的人开始种植蔬菜,在城市中,大量的蔬菜种植都是在室内进行的。
钵苗行星轮系栽植器可以实现高效种植蔬菜并且优化空间利用率,分析它的设计与运动学变化方程,有利于提高其种植效率和精度,降低成本。
二、研究内容和目标本次研究旨在对蔬菜钵苗行星轮系栽植器的设计和运动学变化进行分析,对其运动学和动力学特性进行建模和分析,并提出改进方案,以提高其种植效率和精度。
具体研究内容包括:1. 对蔬菜钵苗行星轮系栽植器的机械结构进行分析和设计,选取合适的材料和电气元器件。
2. 将钵苗行星轮系栽植器的机械结构建模,并进行运动学分析,得到其运动学变化方程和轨迹。
3. 对钵苗行星轮系栽植器建模后,进行动力学分析,得到其动力学特性和阻力。
4. 根据运动学和动力学分析结果,提出改进方案,包括实现准确控制行星轮和链条的转速、优化辊子的设计和磨损机制等。
研究目标为:1. 通过建模和分析,提高对蔬菜钵苗行星轮系栽植器的理解和掌握。
2. 通过改进方案,提高钵苗行星轮系栽植器的种植效率和精度。
三、研究方法本课题主要采用以下研究方法:1. 文献资料调研,分析钵苗行星轮系栽植器的机械结构、工作原理和运动学原理等。
2. 对钵苗行星轮系栽植器机械结构进行建模,并进行运动学分析,得到其运动学变化方程和轨迹等。
3. 对钵苗行星轮系栽植器进行动力学分析,探究其动力学特性和阻力,建立动力学模型。
4. 根据运动学和动力学模型分析结果,提出改进方案,包括对行星轮和链条的转速控制、辊子设计和磨损机制等进行优化。
四、预期成果1. 实现蔬菜钵苗行星轮系栽植器的机械结构设计和运动学分析,并得到其运动学变化方程和轨迹。
2. 实现蔬菜钵苗行星轮系栽植器的动力学分析建模,探究其动力学特性和阻力,并提出改进方案。
3. 提供蔬菜钵苗行星轮系栽植器的设计和改进建议,提高其种植效率和精度。
牵引式小型钵体蔬菜移栽机的设计
牵引式小型钵体蔬菜移栽机的设计范修文;张云秀;童飞特;李传峰【摘要】针对我国蔬菜移栽行业发展的现状和现有蔬菜移栽机存的投苗率低、伤苗率高及设备庞大等问题,设计开发了牵引式小型钵体蔬菜移栽机。
该机型能满足农户的需求,提高作业效率,苗钵通用性强,并且移栽后行距、株距和直立度等性能良好。
该小型蔬菜移栽机采用吊篮及鸭嘴装置移栽苗体,人工投苗,实现半自动移栽。
该蔬菜移栽机在已经耕整过的土地上作业,无需开沟器,机型小巧灵活,设计结构合理,可实现多种蔬菜的移栽,为我国农作物移栽提供了技术支持。
%Taking into account the present situations of the vegetable transplantation , the machine issues such as low see-ding rate , high seedling injury rate , large volume of the machine , this paper is aimed to design and develop small-type tractor bowl transplanter , which can meet the need of farmers , improve the operation efficiency , possess high versatility of seed bowl , and the seeds show acceptable line spacing , vertical spacing and so on .It will transplant seeds by suspen-ded basket and duckbill device , together with artificial seeding , which marks the semi-automatic transplantation .In terms of the components, it consists of assembly of traction frames , ground wheels, transplanters ,seed racks, gratifying-ly , it has been operated on the prepared soils without furrow opener , because of the compact and flexible design , reason-able structure , it can transplant a variety of vegetables , supporting crop transplantation at home technically .【期刊名称】《农机化研究》【年(卷),期】2014(000)010【总页数】4页(P131-134)【关键词】蔬菜移栽;牵引式;小型钵体【作者】范修文;张云秀;童飞特;李传峰【作者单位】塔里木大学机械电气化工程学院/现代农业工程重点实验室,新疆阿拉尔 843300;天津职业大学,天津 300402;塔里木大学机械电气化工程学院/现代农业工程重点实验室,新疆阿拉尔 843300;塔里木大学机械电气化工程学院/现代农业工程重点实验室,新疆阿拉尔 843300【正文语种】中文【中图分类】S223.940 引言蔬菜是人们赖以生存的食物,能提供人体所需的维生素和矿物质。
钵苗移栽机自动送苗装置研究现状及展望
第48卷第1期农业工程与装备2021年2月V ol.48 No.1 AGRICULTURAL ENGINEERING AND EQUIPMENT Feb. 2020 钵苗移栽机自动送苗装置研究现状及展望 方 芹,肖名涛,孙松林,刘 奇,陈 斌(湖南农业大学机电工程学院,湖南长沙410128)摘要:人工送苗速度慢,不适应高速移栽。
研发自动送苗装置是突破移栽速度技术瓶颈的关键环节。
通过分析钵苗移栽机自动送苗装置的结构和类型并总结国内外具有代表性的钵苗移栽机自动送苗装置研究现状,阐述了各类自动送苗装置的工作原理和机构特征。
针对现有自动送苗装置移栽效率低、智能化程度低等问题,提出了应对措施,并对钵苗移栽机自动送苗装置的发展趋势进行了探讨,为钵苗移栽自动送苗装置的选型与设计提供参考。
关键词:钵苗;移栽机;自动;送苗装置中图分类号:S223.9文献标志码:A 文章编号:2096–8736(2021)01–0001–06Research status and prospect of automatic seedling feeding deviceof pot seedling transplanterFANG Qin, XIAO Mingtao, SUN Songlin, LIU Qi, CHEN Bin(College of Mechanical and Electrical Engineering, Hunan Agricultural University, Changsha, Hunan 410128, China)【Abstract】 Artificial seedling delivery speed is slow and does not adapt to high-speed transplanting. The automatic seed delivery device is the bottleneck technology of transplant speed improvement. Therefore, by analyzing the structure and type of the automatic seedling device of the transplanting machine, this paper summarizes the current situation of the research on the automatic seedling delivery device of the seedling transfer machine, which is representative at home and abroad, and expounds the working principle and institutional characteristics of various kinds of the automatic seedling delivery device. Aiming at the problems of low transfer efficiency and low intelligence of the existing automatic seedling delivery device, the paper puts forward the response measures and discusses the development trend of the automatic seedling transfer device of the seedling transfer machine.【Keywords】 pot seeding; transplanter; automatic; seedling delivery device随着我国经济高速发展,城市化范围扩大,工业、商业、住房占地面积日益增加,人均可耕地面积正逐年减少,农村劳动力流失严重,而市场对粮食和经济作物的需求总量却日渐增加,农作物产量可持续增长成为农业发展的主要难题[1]。
科技成果——蔬菜钵苗自走式自动移栽机

科技成果——蔬菜钵苗自走式自动移栽机技术开发单位现代农装科技股份有限公司成果简介蔬菜钵苗自走式自动移栽机是国家科技支撑计划课题“设施园艺清洁高效生产配套装备研制与产业化示范2014BAD08B04”的研究成果,完成时间为2016年5月,2016年11月委托中国机械工业联合会进行了科技成果技术鉴定,鉴定结果为达到国内领先水平。
成果授权发明专利1项,实用新型专利1项。
技术特点成果创新轻简取苗技术、穴盘苗精准输送技术、高速栽植技术及移栽机电驱动自走底盘技术,集成开发了电动自走式自动移栽机械,填补了国内自动移栽机装备空白,栽植频率达到63株/分•行,工作效率赶超同类国外机型洋马PF2R。
创新性蔬菜钵苗自走式自动移栽机适用于番茄、辣椒等作物移栽,研究成果的创新性主要体现在以下方面:(1)迎苗扎取式轻简取苗技术。
(2)采用齿轮五杆机构实现了取苗爪尖嘴垂直取苗和竖直投苗,实现了穴盘苗的自动取苗。
(3)穴盘苗精准输送技术。
(4)采用不完全齿轮结合换向螺旋轴实现苗盘横向间歇进给,弹性自适应棘轮机构实现苗盘纵向间歇进给,实现了穴盘苗的精准进给,累积误差可自动消除。
(5)高速无损栽植技术。
(6)采用椭圆行星齿轮机构驱动鸭嘴栽植器,实现追踪接苗和零速无损栽苗。
先进性成果成功突破我国旱地移栽机械效率低下、操作使用劳动强度大的技术瓶颈,能有效促进设施温室栽植技术的发展。
研究成果积极响应国家清洁生产、节能高效的号召,采用清洁能源锂电池作为自动移栽机动力,真正实现了设施温室内农业生产的无污染、零排放。
工作速度赶超国外同类机型。
盈利性蔬菜钵苗自走式自动移栽机工作效率高,电驱动无污染,整机价格低于国外产品,综合技术经济性较好。
技术成熟度样机试验市场前景(1)2ZBZJ-2型自走式自动移栽机投入批量生产后,预计每台平均售价为14万元,其中生产成本约10万元,利税约4万元,以生产企业年产规模为200台计算,企业每年的利税约为800万元,经济效益比较可观。
叶菜类钵苗移栽机的研制 挑战杯文本 (1)
摘要叶菜类蔬菜(如菠菜空、心菜)病虫害比较严重,连作会使土壤环境恶化,土壤中的病虫害种类和数量逐渐增多,导致蔬菜生长势减弱、产量减少、品质下降。
而大棚栽植蔬菜具有以下的优点:1、安全卫生。
大棚蔬菜有大棚膜使大棚内蔬菜与外界隔离,可以减少大棚外病虫害对棚内蔬菜的侵害,有效控制病虫害的传播,从而减少蔬菜的农药使用次数,更有利于实现蔬菜无公害生产。
2、节省成本。
大棚蔬菜由于外面有大棚膜的保护,所以受雨水的影响比较小,肥料不容易流失;同时,大棚膜不透水,棚内水分也不易蒸发,有利于保持棚内土壤的含水量。
3、适栽品种多。
大棚蔬菜可选择的蔬菜品种比田园蔬菜品种种类更多。
一般当地田园能种植的蔬菜品种,大棚都能种植。
4、提高产量。
大棚膜具有保湿的作用,并且膜内湿度还可以调节,所以对环境的敏感度小于田园蔬菜,受环境的影响也小于田间蔬菜。
5、生产效益高。
蔬菜只有达到一定的积温才能成熟,由于大棚具有保温的作用,缩短了大棚蔬菜的生育期,可以使蔬菜提早成熟提前上市,从而提高蔬菜价格,增加菜农收入,一般亩增经济效益50%以上。
我们通过去当地农科院进行了实地考察,他们对于叶菜类蔬菜的大棚种植需要一定的自动化设备,待在育苗杯的叶菜长出幼苗,就需要把在穴盘中的育苗杯转移到栽植盘中,栽植盘需要放置在有营养液的水池中。
我们针对这一需求,提出了这个项目,这个项目要实现的是将叶菜类蔬菜(如菠菜、空心菜)盛有幼苗的育苗杯由小间距穴盘向大间距栽植盘转移。
我们把这个项目化解成前端执行器,控制器和输送装置三部分设计,每一部分设计实现一部分动作,这样更加简化每一部分的设计,符合我们本科生所学习的内容。
目录第一章前言 (1)1.1研究背景及意义 (1)1.2国内外研究现状 (2)1.2.1国内研究现状 (2)1.2.2国外研究现状 (4)1.3常见的几种移栽机构比较 (6)1.3.1钳夹式移栽机 (6)1.3.2链夹式移栽机 (7)1.3.3吊篮式移栽机 (8)1.3.4导苗式移栽机 (9)1.3.5输送带式移栽机 (10)1.3.6挠性圆盘式移栽机 (10)第二章项目研究前期工作 (11)2.1实地考察 (11)2.2叶菜栽培的三种主要模式 (11)2.2.1 传统模式 (11)2.1.3 穴培模式 (13)2.3叶菜移栽的需求分析 (14)2.3.1 水培模式下的移栽 (14)2.3.2 传统模式下的移栽 (15)第三章方案的设计及优化 (15)3. 1 末端执行器 (15)3.1.1三驱动开合式移钵装置 (15)3.1.2双驱剪叉式稀植移钵装置 (17)3.1.3 单驱弹动式稀植移钵装置 (18)3.1.4 移钵机械手实物 (19)3.1.5 手抓实物图 (20)3.2控制器 (22)3.3 输送装置 (23)3.4 整机的工作过程 (24)4现有成果展示 (24)第一章前言1.1研究背景及意义20世纪20年代,欧洲发达国家研制并开始使用手工喂苗的秧苗移栽机具,用于蔬菜生产作业;30年代末40年代初期,手工喂苗的秧苗移栽机具的人工动作被移栽机构所取代。
蔬菜移栽机的研究与设计
蔬菜移栽机的研究与设计目录摘要 (1)1前言 (6)2移栽机械的国内外现状 (8)3 设计方案的选择 (8)3.1 钳夹式移栽机 (8)3.2 链夹式栽植机 (9)3.3 挠性圆盘移栽机 (10)3.4 吊篮式移栽机 (10)3.5 导苗管式移栽机 (12)3.6带式栽植机 (19)4 机具的机构特点 (20)4.1整机机构特点 (20)4.2主要技术参数 (21)4.3主要工作部件的结构特点及作用 (21)4.3.1 地轮 (21)4.3.2 开沟器 (22)4.3.3 镇压轮 (22)4.3.4 覆土器 (22)4.4设计蔬菜移栽机械的原理 (23)4.4.1 零速原理 (23)4.4.2 栽植机械的结构设计 (23)5 地轮轴的校核 (26)6 设计时间的安排 (31)7 结论和总结 (32)8致谢词 (32)9 主要参考文献、资料 (32)摘要移栽是蔬菜生产过程中的一个重要环节,具有对气候补偿和使作物生育提早的综合效益。
它可以充分利用光热资源,其经济效益和社会效益均非常可观。
但目前移栽过程采用人工移栽,劳动强度大、作业效率低,难以实现大面积栽植制约了生产规模,影响了生产效益,同时也限制了蔬菜生产的发展空间。
目前国内对移栽机械的研究和开发基本属于仿造,没有对国外的移栽机进行重大的改进和技术上的突破,而且国外移栽机结构复杂,价格昂贵,在国内推广难度很大。
因此设计一种新型的移栽机械已成为我国蔬菜种植业发展的迫切需求。
本文在总结吸收了国内外各种移栽机的优缺点和实验室已有研究成果的基础上,基于一种钵苗移栽机构——杠杆顶出式机构,设计了蔬菜钵苗移栽机。
该机的特点有:结构简单,工作可靠;易保证株距的均匀性;能实现开沟、施肥、移栽和覆土等工序。
该蔬菜移栽装置已公开发明专利(200810063013.8)和实用新型专利(200820121105.2);并已公开发明专利蔬菜移栽装置的压盘装置(200910099278.8)。
蔬菜移栽机的研制
[ 关键词 ]蔬菜; 移栽机 ; 栽植 器
[ 中图分类号 ] ¥ 2 2 3 . 9
[ 文献标志码 ] A
[ 文章编号 ] 1 6 7 3 — 3 1 4 2 ( 2 0 1 4 ) 1 0 — 0 0 7 1 — 0 3
[ A b s t r a c t ]I n v i e w o f m a n u a l o p e r a t i o n ,h i g h l a b o r i n t e n s i t y a n d l o w w o r k i n g e i f c i e n c y i n v e  ̄t a b l e t r a n s p l nt a i n g i n o u r
c o u n t r y ,c o mb i n e d wi t h t h e s t r u c t u r a l c h a r a c t e i r s t i c s o f t h e v a r i o u s d o me s t i c t r a n s p l a n t i n g ma c h i n e y r a n d t h e d e v e l o p me n t r e q u i r e me n t s o f f a c i l i t y a g r i c u l t u r e ,a s e e d l i n g v e g e t a b l e t r a n s p l a n t e r i s d e s i g n e d .T h e ma c h i n e h a s t h e a d v nt a a  ̄s o f s i mp l e o p e r a t i o n, c o n v e n i e n t ep r a i r a n d u s e ,h i g h w o r k i n g e ic f i e n c y ,e t c .T h e wo r k i n g p i r n c i p l e f o v e g e t bl a e t r ns a p l a n t e r , ma i n r e s e a r c h me t h o d s a n d me a s u r e s re a i n t r o d u c e d .
第十三届挑战杯大学生课外学术科技作品竞赛科技发明制作
第十三届“挑战杯”大学生课外学术科技作品竞赛
科技发明制作类国家级优秀作品名单
序号
作品
等级
作品名称
所在单位
1
特等奖
《可用于油水分离和水净化处理的双层TiO2基网膜》
清华大学
2
特等奖
《多光照环境下的第一人称手部检测》
清华大学
3
特等奖
《面向军工装备制造业的智能优化排产软件》
北京理工大学
4
特等奖
《新型高效低水损管道混合器》
苏州大学
36
一等奖
《多彩室内冷烟火》
南京理工大学
37
一等奖
《城市隧道火灾时混合通风模式的研究》
南京工业大学
38
一等奖
《轻巧节能型多级离心泵关键技术研究》
江苏大学
39
一等奖
《七丝旋转电弧气电立焊关键技术及设备》
江苏科技大学
40
一等奖
《基于MEMS三轴加速度技术的地震速报装置》
江苏师范大学
41
一等奖
《印刷、吸附、催化--印制电路的新型绿色低成本制备工艺》
复旦大学
42
一等奖
《“Lingkege”自由式滑雪空中技巧项目比赛系统》
吉林体育学院
43
一等奖
《“取出式”不等速双曲柄传动全自动水稻钵苗移栽机构的优化设计及研制》
东北农业大学
44
一等奖
《点触云安全系统》
哈尔滨工程大学
45
一等奖
《基于三维可视化技术的医生桌面图像处理平台》
北华大学
46
一等奖
《用于精细农业的CO2浓度测量新技术与装置》
一等奖
《全自动驾驶多旋翼无人机智能飞控系统》
挑战杯种菜项目计划书
挑战杯种菜项目计划书编号:_______________________甲方:_______________________乙方:_______________________地址:_______________________联系人:_______________________联系电话:_______________________签订日期:_______________________签订地址:_______________________第一条项目背景与目标a. 项目背景① 当前城市农业种植逐渐受到广泛关注,绿色环保、健康食品的需求日益增加。
② 许多城市居民有意愿在家中或社区种植蔬菜,但缺乏相应的资源与经验。
③ “挑战杯种菜项目”旨在通过合作的方式,为居民提供一个可持续发展的绿色种植方案。
④ 本项目的核心目标是推广智能农业技术,提升居民对健康食品的认知与参与度。
b. 项目目标① 提供一个简单易用的种植系统,帮助用户在家中或社区内种植蔬菜。
② 增强用户对绿色、环保农业的认同,减少对传统农药化肥的依赖。
③ 通过教育和培训,提升居民的种植技能,促进社区共同发展的农业文化。
④ 通过技术支持和市场推广,促进本项目的可持续发展。
c. 项目计划① 项目分为前期准备、技术研发、市场推广三个阶段。
② 在前期准备阶段,将进行市场调研,评估用户需求并确定合作伙伴。
③ 技术研发阶段将集中于智能种植系统的优化,确保产品质量和用户体验。
④ 市场推广阶段通过线上线下结合的方式,扩大项目影响力,吸引更多用户参与。
第二条双方权利与义务a. 甲方权利与义务① 甲方负责提供必要的技术支持,包括智能种植系统的研发与生产。
② 甲方应确保提供的设备和产品符合相关安全标准及环境保护要求。
③ 甲方负责市场推广的主要工作,确保项目在规定时间内达到预期目标。
④ 甲方有权对乙方的工作进度进行监督和评估,确保项目顺利实施。
b. 乙方权利与义务① 乙方负责协助甲方进行市场调研,提供必要的行业资讯和用户反馈。
蔬菜钵体苗自动移栽机取苗装置设计
任务书课题名称单行蔬菜钵体苗自动移栽机的设计—取苗装置设计主要任务与目标现代的中国是一个经济飞速发展的中国,是一个农业大国,更是一个工业大国,我国也有越来越多的重视农业与工业的结合,将工业机械用于农业,以减轻人力操作,增加作业效率,蔬菜移栽机也更多的在进行开发并投入使用价值,对于这方面的研究也更加有意义。
所以,我们结合所学,应用三维仿真软件,初步设计出移栽机的取苗机构,为以后的进一步研究做基础。
主要内容与基本要求1、查找国内外相关文献资料,了解西方发达国家和我国蔬菜移栽机方面的区别、合理之处机器弊端2、收集整理其他国家对于移栽机的分类及其成果3、整理数据资料落实写作。
4、通过对文献的研究和分析,具体描述我国农业机械尤其是自动移栽机的发展和展望。
5、通过上述分析,设计蔬菜自动移栽机。
要求:1.文献综述报告(不少于3000字)一篇2.开题报告一篇3.毕业论文一篇(不少于10000字)4.实习日记、实习报告3000字以上主要参考资料及文献阅读任务[1]我国蔬菜育苗移栽机械化的现状与发展方向,/2007/3-5/94922.htm[2]陈殿奎.蔬菜机械化育苗的现状与展望[J].农业工程学报,1990,(12):20~25.[3]G. V. Prasanna Kumar ;H. RahemanInternational Journal of VegetableScience,V ol.14,No.3,232-255[4]Konosuke TSUGA. Development of fully automatic vegetable transplanter.JARQ 34, 21~28 (2000)[5]王君玲,高玉芝,李成华.蔬菜移栽生产机械化现状与发展方向.农机化研究,2004(02):22~28[6]张波屏.现代种植机械工程[M].北京:机械工业出版社,1997.[7]封俊.论我国早地栽植机械的开发前景与方向[J].中国农机化,2000,(4):12~13.[8]俞高红,陈志威,赵匀,孙良,叶秉良椭圆一不完全非圆齿轮行星系蔬菜钵苗取苗机构的研究DoI:10.390l,JME.2012.13.032[9]毛君, 毕长飞.基于Pro/Engineer 采煤机的三维动态仿真与优化设计[J].煤矿机械,2006,27(6) : 990-994.外文翻译任务(见外文翻译)计划进度:起止时间内容2013.01.07~2013.01.12 调研、信息汇总,文献查阅分析2013.01.13~2013.01.30 外文翻译、文献综述、开题报告,并熟悉理论力学、机械原理等相关知识2013.01.31 ~2013.03.01 提交开题报告、文献综述及外文翻译2013.03.02~2013.03.08 开题答辩2013.03.09~2013.03.16 蔬菜移栽机整体方案设计2013.03.17~2013.03.30 取苗机构设计及零部件设计2013.03.31~2013.04.11 三维CAD建模、装配2013.04.12~2013.04.24 三维运动学分析仿真2013.04.25~2013.05.02 结构改进设计及毕业论文撰写2013.05.03~2013.05.10 完成并提交毕业论文2013.05.11~2013.05.24 整理材料准备答辩2013.05.25~2013.05.29 论文答辩实习地点指导教师签名年月日系意见系主任签名:年月日学院盖章主管院长签名:年月日文献综述报告班级姓名课题名称单行蔬菜钵苗自动移栽机的设计—取苗装置设计文献综述目录1前言2国外蔬菜自动移栽机的发展和研究成果3国内蔬菜自动移栽机发展和研究成果4国内外蔬菜自动移栽机动态与趋势5总结参考文献(报告全文附后)指导教师审批意见签名:年月日单行蔬菜钵苗自动移栽机的设计—取苗装置设计1前言据FAO统计,2006年中国已成为世界上最大的蔬菜生产国,蔬菜产量约占世界总产量的49.6%[1]。
蔬菜穴盘苗钵体力学分析与移栽机器人设计研究

蔬菜穴盘苗钵体力学分析与移栽机器人设计研究我国穴盘苗移栽处于人工取苗半自动栽苗水平,研发结构简单、功能精良并适于当地育苗生产的取苗装置是实现穴盘苗全自动移栽的关键。
目前,国内尚无法设计出能够实际生产应用的自动移栽机,主要原因是机构设计中取苗爪与钵体互作规律不清,穴盘苗的生物力学特性数据短缺,机构设计与育苗工艺不相结合,严重制约着自动移栽机的发展。
针对这些制约因素,本研究主要完成以下工作:(1)研究了穴盘苗脱盘力学规律和钵体抗压力学行为。
研究发现穴盘苗脱盘过程是钵土与幼苗根系相互牵动摆脱孔穴粘附的过程,对穴盘苗的夹取作用主要用于克服钵体与穴孔之间建立的粘附力,当使用128穴盘育苗移栽时,沿垂直穴孔方向取出穴盘苗的夹取力约为1.94N。
钵体的抗压力与变形呈非线性变化规律,抗压力随着压缩变形的增大先缓慢增大再显著增大。
在平板压缩过程中,钵体无明显的屈服破坏点,其压缩破坏特征是从钵体盘根稀疏的区域开始,逐渐扩大破碎度。
在弹塑性方面,随着压缩变形的增大,滞后损失Ep、抗压峰值力Fmax均增大,弹性度rε减小,并且穴盘苗钵体压缩加载变形越大,其塑变能力越强,具有一定的可塑性,可以使用夹取针夹持钵体而不破坏其整体性。
利用Burgers模型能有效表征穴盘苗钵体的压缩蠕变特性,利用二单元Maxwell模型能有效描述穴盘苗钵体的力松弛特性,获得了对应的粘弹性参数,并分析了压缩加载蠕变和力松弛规律。
对于穴盘苗自动移栽而言,其流变学特性影响微弱,可以不加考虑。
通过试验测试方法对比分析了多种穴盘苗的力学特性,研究发现不同蔬菜穴盘苗处理间的脱盘力无显著性差异,不同穴盘苗钵体的抗压力与变形关系均遵从非线性曲线,都没有明显的线弹性。
(2)基于对穴盘苗脱盘力、夹取针插入钵体拉拔的摩阻特性以及钵体抗压力分析,建立了穴盘苗的脱盘力FL、钵体抗压力F、压缩加载的面积AY与夹取针的插入角度α、夹持变形角△α、夹持钵体的面积AJ、钵体夹持变形量x之间的数学关系。
步行隐藏式手扶纸钵育苗蔬菜移栽机的发展外文文献翻
步行隐藏式手扶纸钵育苗蔬菜移栽机的开展一个9. 75千瓦电力步行式2行全自动蔬菜插秧机,局部纸钵育苗手动拖拉机开发电源可用,纸钵的尺寸和空间在手扶拖拉机的可用性在旋耕机耕作总成的彻底去除。
它包括两套投料输送机,计量输送机,育苗落管,沟开门红,覆土装置,自动送料机构,深度调整轮和搭上安排。
水平板条型链式输送机被用作进料输送机,而横推式链式输送机那么作为计成输送。
自动送料机构,与时序轴,凸轮,离合器,用于协调喂养和计量输送协调工作。
蔬菜插秧机在两个进料输送机垂直方向输送108苗,喂它们的计量输送,并种植在沟的直立方向。
蔬菜插秧机的性能是通过在45X45cm的空间,现场0. 9km/h 的速度移栽番茄来进行评估的。
现场插秧机的实地能力被评定为0.026公顷每小时。
这就在传统的手工插秧方法的根底上节省了68%的劳动力和80%的时间。
插秧机的种植率被认为是4%的遗漏率和5%的种植倾斜种植率之内每分钟32盆育苗栽培。
兴旺国家的蔬菜插秧机的土壤覆盖效率约为81%,移栽质虽是令人满意的。
1.简介印度是世界第二大蔬菜生产国,生产129万吨,20XX-20XX年度产量16. 2吨/公顷(印度政府,20XX年)。
约175种蔬菜,包括82个田地的蔬菜和41根(块茎和鳞茎)作物生长在印度(兰德哈瓦,1998年;萨布拉马尼,的瓦拉达拉,Asokan的.2000 年)。
大局部蔬菜,如瓜类,豆类,秋葵和叶菜类蔬菜在LU间直接播种。
有的蔬菜比方番茄,茄子,辣椒等蔬菜是先播种在苗圃育苗然后人工移植到山脊或准备良好的苗床(加伊阿罗拉,2007年)。
手动移栽是劳动密集,价格昂贵,费时而且常常导致非均匀的植物分布。
2排和3排半挂式半自动蔬菜插秧机已在印度的裸根苗和插头领域开展。
袖珍式计量装置已在裸根苗的移栽领域得到应用。
田地的能力和劳动力的需求己报告为0. 082-0. 092公顷每小时和44. 4每人每公顷,分别在0. 8-1.0公里每小时的前进速度。
蔬菜钵苗自动移栽机送苗装置的设计与分析
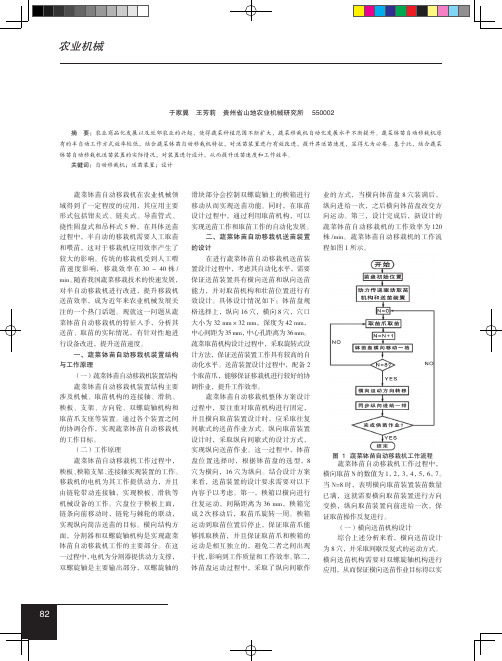
蔬菜钵苗自动移栽机在农业机械领 域得到了一定程度的应用,其应用主要 形式包括钳夹式、链夹式、导苗管式、 挠性圆盘式和吊杯式 5 种,在具体送苗 过程中,半自动的移栽机需要人工取苗 和喂苗,这对于移栽机应用效率产生了 较大的影响。传统的移栽机受到人工喂 苗 速 度 影 响, 移 栽 效 率 在 30 ~ 40 株 / min。 随着我国蔬菜移栽技术的快速发展, 对半自动移栽机进行改进,提升移栽机 送苗效率,成为近年来农业机械发展关 注的一个热门话题。现就这一问题从蔬 菜钵苗自动移栽机的特征入手,分析其 送苗、取苗的实际情况,有针对性地进 行设备改进,提升送苗速度。 一、蔬菜钵苗自动移栽机装置结构 与工作原理 (一)蔬菜钵苗自动移栽机装置结构 蔬菜钵苗自动移栽机装置结构主要 涉及机械、取苗机构的连接轴、滑轨、 秧板、支架、方向轮、双螺旋轴机构和 取苗爪支座等装置。通过各个装置之间 的协调合作,实现蔬菜钵苗自动移栽机 的工作目标。 (二)工作原理 蔬菜钵苗自动移栽机工作过程中, 秧板、 秧箱支架、 连接轴实现装置的工作。 移栽机的电机为其工作提供动力,并且 由链轮带动连接轴,实现秧板、滑轨等 机械设备的工作。穴盘位于秧板上面, 链条向前移动时,链轮与棘轮的联动, 实现纵向简洁送苗的目标。横向结构方 面,分割器和双螺旋轴机构是实现蔬菜 钵苗自动移栽机工作的主要部分。在这 一过程中, 电机为分割器提供动力支撑, 双螺旋轴是主要输出部分,双螺旋轴的
滑块部分会控制双螺旋轴上的秧箱进行 移动从而实现送苗功能。同时,在取苗 设计过程中,通过利用取苗机构,可以 实现送苗工作和取苗工作的自动化发展。 二、蔬菜钵苗自动移栽机送苗装置 的设计 在进行蔬菜钵苗自动移栽机送苗装 置设计过程中,考虑其自动化水平,需要 保证送苗装置具有横向送苗和纵向送苗 能力,并对取苗机构和壮苗位置进行有 效设计。具体设计情况如下:钵苗盘规 格选择上,纵向 16 穴,横向 8 穴,穴口 大小为 32 mm×32 mm,深度为 42 mm, 中心间距为 35 mm, 中心孔距离为 36 mm。 蔬菜取苗机构设计过程中,采取旋转式设 计方法,保证送苗装置工作具有较高的自 动化水平。送苗装置设计过程中,配备 2 个取苗爪,能够保证移栽机进行较好的协 调作业,提升工作效率。 蔬菜钵苗自动移栽机整体方案设计 过程中,要注重对取苗机构进行固定, 并且横向取苗装置设计时,应采取往复 间歇式的送苗作业方式。纵向取苗装置 设计时,采取纵向间歇式的设计方式, 实现纵向送苗作业。这一过程中,钵苗 盘位置选择时,根据钵苗盘的选型,8 穴为横向,16 穴为纵向。结合设计方案 来看,送苗装置的设计要求需要对以下 内容予以考虑。第一,秧箱以横向进行 往复运动,间隔距离为 36 mm,秧箱完 成 2 次移动后,取苗爪旋转一周。秧箱 运动到取苗位置后停止,保证取苗爪能 够抓取秧苗,并且保证取苗爪和秧箱的 运动是相互独立的,避免二者之间出现 干扰, 影响到工作质量和工作效率。 第二, 钵苗盘运动过程中,采取了纵向间歇作
果蔬秧苗移栽器的设计研究

r g e u p n ih c n b a r - o .Th s i p o e c i e c n ma e t e p o e s o i g n o e a ig s e l g i q i me twh c a e c r y h me n i m r v d ma h n a k h r c s f dg i g h l ,t k n e d i , n
S u yo r i a d Ve ea l h o a s ln igEq i me t td n F u t n g t beS o tTrn pa tn up n
REN - n Yu ga g ( rc lu a a h n r ra Ag iut r l M c ie y Bu e u,QigZ h n 3 4 0.Ch n n US a xi0 0 0 ' ia)
维普资讯
0 2 9 J.Sh n 008 a xi Agrc i .Uni v.
山 西 蓑 ( 0 6)0 —0 70 6 卜8 5 20 10 7 —3
毕业论文穴盘苗叶菜移栽机械装置的研究
穴盘苗叶菜移栽机械装置的研究1 前言随着世界人口日益增加,粮食和经济作物等农产品的需求量日渐增加,世界各国对农业生产的发展都给予了极大的重视和关注。
中国是世界上的农业大国,农业机械化是我国农业现代化的重要组成部分,我国在基本实现了耕作和收获作业的机械化后,种植机械化正在成为农业机械化的一个重点领域。
穴盘育苗移栽技术是从20 世纪70 年代在欧美等农业发达国家率先发展起来的。
穴盘苗自动移栽是一种适合工厂穴盘苗生产的育苗移栽方式,与常规育苗移栽方式相比,成本可降低25% ~ 40%,具有出苗率高,出苗整齐,缓苗快,病虫害少,机械化程度高,省工,省时,节约能源、种子和育苗场地,便于大规模管理,保护和改善农业生态环境等各种优点。
该技术代表了育苗移栽技术的发展方向,受到了种植业者的欢迎。
由于人工移栽劳动强度大、需要劳动力多、效率低,难以实现大面积、大规模移栽,而生产规模比较小、经济效益低下,不利于穴盘苗移栽技术的推广应用。
移栽机械化程度低下,严重影响了农业经济作物的发展。
因此,大力发展育苗移栽技术,实现机械化移栽势在必行[1]。
2 穴盘苗叶菜移栽机械研究现状2.1国外研究现状近20年,国外对移栽机的研究已进入自动化阶段。
国的KyeongUKKim等提出了一种适合蔬菜移植的拾取装置。
这套装置包括一个路径产生器、拾取针和针驱动器。
路径产生器是一个5杆机构,由固定滑槽、驱动连杆、连接杆和一个滑杆组成;Kut等1987年研究了基于Puma560机器人的移苗机器。
移苗机器人的末端执行部件是一个平行夹类型的手爪。
他们研究的目的是测试机器移苗的作业周期,研究一种针对单棵苗进行抓取和栽植的末端执行部件,另外还用计算机模拟的方法对移苗机器人的应用性能进行评估。
移苗机器人末端执行手爪是在Unimation 510型气动平行爪的基础上进行改进设计的,包括增加开度调节螺母,在每个手爪的侧固定一个轻质的镀锌板作为“手指”,其抓取只有开与合拢2种状态,开与合拢位置的距离是20mm,2个夹片长3mm。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
摘要叶菜类蔬菜(如菠菜空、心菜)病虫害比较严重,连作会使土壤环境恶化,土壤中的病虫害种类和数量逐渐增多,导致蔬菜生长势减弱、产量减少、品质下降。
而大棚栽植蔬菜具有以下的优点:1、安全卫生。
大棚蔬菜有大棚膜使大棚内蔬菜与外界隔离,可以减少大棚外病虫害对棚内蔬菜的侵害,有效控制病虫害的传播,从而减少蔬菜的农药使用次数,更有利于实现蔬菜无公害生产。
2、节省成本。
大棚蔬菜由于外面有大棚膜的保护,所以受雨水的影响比较小,肥料不容易流失;同时,大棚膜不透水,棚内水分也不易蒸发,有利于保持棚内土壤的含水量。
3、适栽品种多。
大棚蔬菜可选择的蔬菜品种比田园蔬菜品种种类更多。
一般当地田园能种植的蔬菜品种,大棚都能种植。
4、提高产量。
大棚膜具有保湿的作用,并且膜内湿度还可以调节,所以对环境的敏感度小于田园蔬菜,受环境的影响也小于田间蔬菜。
5、生产效益高。
蔬菜只有达到一定的积温才能成熟,由于大棚具有保温的作用,缩短了大棚蔬菜的生育期,可以使蔬菜提早成熟提前上市,从而提高蔬菜价格,增加菜农收入,一般亩增经济效益50%以上。
我们通过去当地农科院进行了实地考察,他们对于叶菜类蔬菜的大棚种植需要一定的自动化设备,待在育苗杯的叶菜长出幼苗,就需要把在穴盘中的育苗杯转移到栽植盘中,栽植盘需要放置在有营养液的水池中。
我们针对这一需求,提出了这个项目,这个项目要实现的是将叶菜类蔬菜(如菠菜、空心菜)盛有幼苗的育苗杯由小间距穴盘向大间距栽植盘转移。
我们把这个项目化解成前端执行器,控制器和输送装置三部分设计,每一部分设计实现一部分动作,这样更加简化每一部分的设计,符合我们本科生所学习的内容。
目录第一章前言 (1)1.1研究背景及意义 (1)1.2国内外研究现状 (2)1.2.1国内研究现状 (2)1.2.2国外研究现状 (4)1.3常见的几种移栽机构比较 (6)1.3.1钳夹式移栽机 (6)1.3.2链夹式移栽机 (7)1.3.3吊篮式移栽机 (8)1.3.4导苗式移栽机 (9)1.3.5输送带式移栽机 (10)1.3.6挠性圆盘式移栽机 (10)第二章项目研究前期工作 (11)2.1实地考察 (11)2.2叶菜栽培的三种主要模式 (11)2.2.1 传统模式 (11)2.1.3 穴培模式 (13)2.3叶菜移栽的需求分析 (14)2.3.1 水培模式下的移栽 (14)2.3.2 传统模式下的移栽 (15)第三章方案的设计及优化 (15)3. 1 末端执行器 (15)3.1.1三驱动开合式移钵装置 (15)3.1.2双驱剪叉式稀植移钵装置 (17)3.1.3 单驱弹动式稀植移钵装置 (18)3.1.4 移钵机械手实物 (19)3.1.5 手抓实物图 (20)3.2控制器 (22)3.3 输送装置 (23)3.4 整机的工作过程 (24)4现有成果展示 (24)第一章前言1.1研究背景及意义20世纪20年代,欧洲发达国家研制并开始使用手工喂苗的秧苗移栽机具,用于蔬菜生产作业;30年代末40年代初期,手工喂苗的秧苗移栽机具的人工动作被移栽机构所取代。
送苗入土过程实现了机械化;50、60年代,多种不同结构型式的半自动移栽机被研制生产并使用。
同时,育苗用土钵制钵机开始出现;至20世纪80年代,半自动移栽机、制钵机已形成完整的系列,并在农业生产中广泛使用;到目前为止,欧洲在蔬菜育苗土钵成型及钵上单粒精密播种和自动移栽机械设备等技术上已经达到完善。
目前,我国移栽机械的研究和应用中还存在许多问题亟待解决: 农机研究与我国农业生产需求相脱节,无法满足国内农业生产的真正需要; 没有自行的相关研究体系,大量抄袭、仿制国外先进机型,无法适应国内生产; 现行使用的机型移栽质量不稳定,通用性差,自动化程度较低,且机具造价较高,农机与农艺的融合不紧密[1] ,苗盘尺寸、钵的形状和尺寸没有统一标准,给提高移栽自动化程度带来一定困难。
传统的农作物移栽主要依靠人工作业完成,劳动强度大、生产效率低、费工费时,且人工移栽很难保证作业质量。
因此,实现蔬菜移栽机械化是扩大蔬菜移栽面积和发挥蔬菜移栽优势的关键所在,对于减轻蔬菜移栽作业的劳动强度和提高移栽质量、效益具有重要意义。
随着时代的发展,大棚养殖蔬菜普遍率提高,养殖自动化需求越来越高,所以适用于大棚叶菜类移栽机是适应时代和潮流的。
通过大棚养殖蔬菜可以大大缩短蔬菜的生长周期,而且大棚蔬菜一年四季都可以养殖,研究大棚叶菜类蔬菜移栽机具有一定的必要性。
1.2国内外研究现状1.2.1国内研究现状国内的穴盘育苗技术研究时间还不是很长,穴盘苗自动移栽机的研究还刚刚起步,相比国外成熟的技术体系还存在很大的差距。
穴盘苗移栽机械分为田间露地移栽机械、温室内移栽的棚室移栽机械以及用于将穴盘秧苗植入花盆的自动移栽机械手。
常见的田间露地移栽机机型主要包括: 钳夹式移栽机、链夹式移栽机、挠性圆盘式移栽机、吊杯式移栽机、导苗管式移栽机、输送带式移栽机和空气整根营养钵育苗移栽机。
这些机型均应用于钵苗移栽,对于穴盘苗移栽均需要手工取苗、投苗,机械化程度低。
目前,国内对穴盘苗自动移栽机的研究主要集中在对温室内移栽的棚室移栽机械以及用于将穴盘苗植入花盆的自动移栽机械手的研究,还未涉足到适合大田作业的、不需手工取苗投苗的穴盘苗全自动移栽机械的研究,仅有少数农业科研院校对穴盘苗移栽机进行了探索性的研究。
1996 年,吉林工业大学范云翔等研制出一种空气整根气吸式秧苗全自动移栽机。
该机采用吸力较大的气缸投苗机构,投苗过程中穴盘苗与运动部件不直接接触,伤苗率相对比较低。
其移行机构由步进电机驱动,位置精度较高,由单片机来控制,整机可靠性较强。
但该设备只适用于水稻秧苗,若用于移栽蔬菜和花卉等幼苗,则易使其茎秆秤断。
2003 年,中国台湾吕英石等人研制了可调整式花卉穴盘苗假植机构。
假植爪动作的流程: 当假植爪位于原点时之状态为假植爪整体上升、夹取爪打开、并且位于穴盘上方; 当要夹取穴盘苗时则假植爪整体往下降至定点后夹取,动作完成后,假植爪往上升移动至生长盘位置上方,假植爪下降将穴盘苗植入生长盘中,然后爪打开并同时上升,再借着气压缸回到原点,如此完成单一循环的假植作业。
气压式可调整花卉秧苗移栽如图5所示。
2005 年,中国农大孙刚对生菜自动移栽机进行了初步探索,设计了一种龙门式的移苗装置。
其用气爪作为执行部件,采用运行μC /OS -Ⅱ嵌入式操作系统的16 位微控制器作为核心的控制系统。
该自动移苗机能按照编程的路径和方式可以完成规定的移栽,但是还不能克服幼苗的柔韧性等问题,气爪抓取的精确率和成功率需要进一步的提高。
因为只是初步探索,所以在移苗手爪、移苗机构的设计和机构的稳定性等方面还需要完善。
同时,中国农业大学强丽慧的浮板蔬菜生产自动移苗装置是移苗机构中直接与苗接触的部分。
由它来具体执行拔苗、栽苗作业。
移苗装置由移苗气缸、移苗针、可调角度连接件和移苗针固定架等组成。
拔苗时,移苗气缸伸出,移苗针以30°扎入基质中。
之后,机械臂缩回,并向栽苗位置移动。
在此过程中,移苗装置起到搬运苗的作用。
栽苗时,移苗气缸缩回,移苗针随之缩回,苗栽入孔穴中。
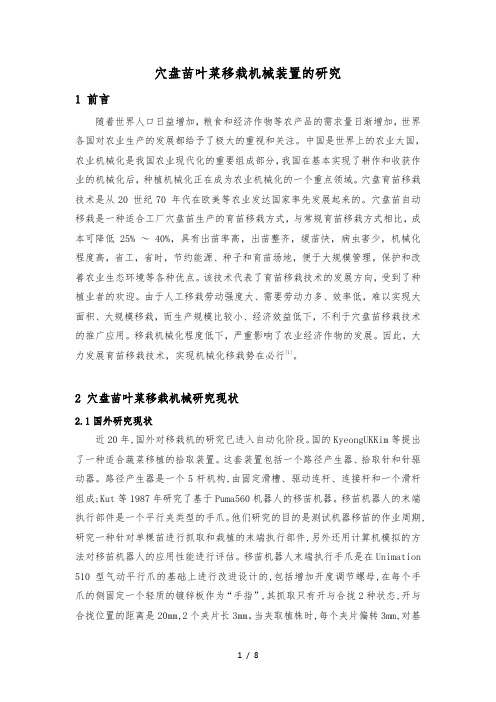
2007 年,沈阳农业大学田素博等人设计了一种基于PLC 的穴盘苗移栽机械手控制系统。
其中,穴盘苗移栽机械手的工作过程:“定位—抓取—定位—投放”,能实现穴苗单线往复移栽。
其由气力驱动系统、夹持机构、控制系统及秧和花盆输送装置4个工作机构协同配合实现这一系图1基于PLC 的穴盘苗移栽机机械手示意图列连续动作。
其控制系统由PLC、行程开关等组成。
结果表明,该控制系统的设计合理,性能可靠。
2009 年,刘凯等人研究了PLC 在穴盘苗移栽机器人控制系统中的应用。
所涉及到的穴盘苗移栽机器人由输送带、视觉相机、三维运动平台和机械手组成。
研究中,通过2 台PLC 的合理组合和程序的设计,实现了多电机控制系统的架构,为移栽机器人各机构平稳、有序运行提供了软件基础。
该控制系统整体布局合理、稳定性好、程序设计方法简单易行,提高了控制系统的柔性和可靠性,较好地兼顾了精度和成本。
1.2.2国外研究现状近20年,国外对移栽机的研究已进入自动化阶段。
韩国的KyeongUKKim等提出了一种适合蔬菜移植的拾取装置。
这套装置包括一个路径产生器、拾取针和针驱动器。
路径产生器是一个5杆机构,由固定滑槽、驱动连杆、连接杆和一个滑杆组成;Kut等1987年研究了基于Puma560机器人的移苗机器。
移苗机器人的末端执行部件是一个平行夹类型的手爪。
他们研究的目的是测试机器移苗的作业周期,研究一种针对单棵苗进行抓取和栽植的末端执行部件,另外还用计算机模拟的方法对移苗机器人的应用性能进行评估。
移苗机器人末端执行手爪是在Unimation 510型气动平行爪的基础上进行改进设计的,包括增加开度调节螺母,在每个手爪的内侧固定一个轻质的镀锌板作为“手指”,其抓取只有张开与合拢2种状态,张开与合拢位置的距离是20mm,2个夹片长3mm。
当夹取植株时,每个夹片偏转3mm,对基质施加大约为4N的力,以保证能够夹持住基体而又不伤害作物。
在苗盘相邻的情况下,在3.3min内能完成36个苗的移植,存活率可达96%Kc.Ting(丁冠中)等1990年研究了一种带有传感器的滑动针(SNS)作为带手爪的移苗机器人,它是基于SCARA机器人机理的。
SNS的基本部件是2根在套中运动、倾斜安装的滑针,安装和调节滑针位置的支撑框架和一个电容型接近传感器等组成。
每根针都由一个双动空气气缸驱动,针的角度和位置可根据穴盘和秧苗的不同而进行调节,电容式近程传感器可调节感应距离,保证夹持器夹住而不伤害秧苗。
在移栽过程中,针缩进,接近穴孔后,针开始伸展,穿人基质中。
幼苗从育苗盘移植到苗盘时,单苗移栽时间为2.60~3.25s。
试验结果表明,随着穴盘苗状况不同,移苗成功率为50%~95%。
Ryu等人2000年设计了一种由气动系统驱动的夹取装置。
该装置末端器由步进电机、气缸、气动卡盘和夹取指组成。
其末端执行件由步进电机带动旋转,并根据植株的方位确定针状夹取指的位置,避免抓取时对植株叶片的伤害。
气缸可以推动夹取指插入苗盘的基质中,然后通过气动卡盘的开关来实现对秧苗的抓取、保持和释放。
但在土壤湿度较低时,这种末端执行件就会显现出它的局限性,为了克服这个局限性,Ryu等人又进行了改进,两个手指成15°角,每个手指各装有一个气缸,增强了灵活性和可靠性。
Choi等人2002年开发了一种新的用于蔬菜移栽的末端执行器,由轨迹发生器、夹取指针和指针驱动器等组成,用23天的蔬菜苗做试验,该装置移栽效率30株/min,移栽成功率97%。
1.3常见的几种移栽机构比较1.3.1钳夹式移栽机主要工作部件有:钳夹式在栽植部件,开沟器,覆土镇压轮,传动机构及机架等。