转子动力学基础
转子动力学培训 API 学习

叶轮等热套零件的惯性质量对于
转子系统的影响不能忽略,应该考虑
在内。
大部分的电机包括如下附加质量:
1 叶轮,盘; 2 联轴器; 3 轴套; 4 平衡盘; 5 推力头; 特殊的机器还包括:
转子建模的要求:
1 单元宽径比不应该大于1; 2 单元宽径比不应该小于0.1; 第一点为了保证计算精度,第二
点为了保证相邻轴端长度变化过大
引起计算问题。
如果对于某个小特征的建模,不 知道对计算结果是否有影响,则 可以采用两种方式建模计算结果。 如果细小的结构的变化对模型计算 结果有明显的影响,其实也就说明 了转子设计本身就存在缺陷。
无阻尼临界转速分析必须至少包 扩如下输出内容; 1 在运行转速范围内以及超过运行 转速的一阶模态振型图。 考虑高于运行转速临界转速的原因: A 可能存在突然超速; B 由于轴承间隙变大造成临界转速降低;
必须添加一定的不平衡质量 使探针处的振动幅值增加到 如下振动限值。
施加的不平衡量必须大于2倍 公式所示的残余不平衡量。
转子建模对于所有的 工程分析均至关重要。 如果模型建立与实际 存在差别那么再复杂 的分析也是无用的。 建模一般步骤: 1 建立质量弹性模型; 2计算轴承的静态工况参 数(包括齿轮载荷等其他 所有静态载荷); 3 计算油膜轴承的动态参数; 4计算浮环密封的动态参数(如果有) 5计算所有其他激振机理;
转子建模一般采用两周 元素组成,转轴块(圆柱 单元或者圆锥单元),圆盘 单元。 其中的转轴单元既对系统贡献 惯性又贡献刚度,圆盘单元仅 贡献惯性。
对于某些特征不好描叙的转子结构 的建模可以采用有限元分析方法来 考虑转子结构的刚度,再采用等效 刚度的方法建模。
转子系统动力学
转子系统动力学1. 引言转子系统动力学是研究转子在运动过程中的力学特性和动力学行为的学科。
转子系统广泛应用于各种机械设备中,例如发电机、涡轮机、离心压缩机等。
深入了解转子系统的动力学行为对于设计和优化这些机械设备至关重要。
转子系统动力学的研究内容包括转子的振动特性、转子的稳定性、转子的受力分析等。
在转子系统动力学中,转子被视为一个连续体,其运动受到各种力的作用,包括离心力、重力、惯性力等。
通过对这些力的分析和计算,可以获得转子的运动规律和稳定性。
2. 转子的振动特性转子的振动特性是转子系统动力学研究的重要内容之一。
转子的振动可以分为自由振动和强迫振动两种情况。
2.1 自由振动自由振动是指转子在没有外界力作用下的振动。
自由振动的特点是振幅和频率都是固定的,振动形式可以是简谐振动或复杂振动。
自由振动的频率由转子的刚度和质量分布决定。
2.2 强迫振动强迫振动是指转子在外界激励力作用下的振动。
外界激励力可以是周期性的,也可以是非周期性的。
强迫振动的特点是振幅和频率随外界激励力的变化而变化。
3. 转子的稳定性转子的稳定性是指转子在运动过程中是否保持平衡状态的能力。
稳定性的分析可以通过线性稳定性分析和非线性稳定性分析两种方法进行。
3.1 线性稳定性分析线性稳定性分析是指通过线性化转子系统的运动方程,然后对线性化方程进行分析,判断转子系统的稳定性。
线性稳定性分析的基本思想是将非线性问题近似为线性问题,通过对线性问题的分析来判断转子系统的稳定性。
3.2 非线性稳定性分析非线性稳定性分析是指直接对转子系统的非线性运动方程进行分析,判断转子系统的稳定性。
非线性稳定性分析考虑了转子系统的非线性特性,能够更准确地描述转子系统的稳定性。
4. 转子的受力分析转子的受力分析是研究转子系统动力学的重要内容之一。
转子在运动过程中受到各种力的作用,包括离心力、重力、惯性力等。
4.1 离心力离心力是转子在旋转过程中由于离心力的作用而产生的力。
转子动力学培训 (API 684学习)
模态振型
模态振型指在临界转速时 转子的振动形态。与轴承 转子的刚度有关。
相位角
相位角是指测点出测量得到 的最大振幅与转子上标记位 置的相对角度。相位角可以 用于确定不平衡量的位置以 及临界转速的位置还有与临 临界转速相关的放大系数。 当转子运行在临界转速以下 时振动最大值与不平衡量的 位置比较接近,当转子运行 转速高于第一阶临界转速( 低于第二阶临界转速)时转子 的最大振动相位与不平衡量的 位置有接近180度的相位差。经 过第一阶临界转速时相位有明 显的变化。
在转子轴承系统设计时应该
考虑如下激振因素但不限于
这些因素。
1 转子系统不平衡; 2油膜不稳定; 3 内部摩擦; 4 叶片,小孔以及扩流器的通过频率; 5齿轮啮合与变频; 6 不对中; 7转子系统松动; 8摩擦涡动; 9边界流体分离状态; 10空气动力学交叉饮料; 11同步涡动; 12 滚动轴承的通过频率;
可以通过对计算结果与测试结果的对比来 优化模型建立,积累经验。 根据一般经验转子的二阶弯曲临界转速以及 稳定性对叶轮、轴套等的热套作用不明显。
叶轮等热套零件的惯性质量对于
转子系统的影响不能忽略,应该考虑
在内。
大部分的电机包括如下附加质量:
1 叶轮,盘; 2 联轴器; 3 轴套; 4 平衡盘; 5 推力头; 特殊的机器还包括:
假设转轴的质量可以忽略那么 转子与轴承的等效刚度可以以 下列公式代替。 从公式可知哪个部分的相对刚度 越低则对系统刚度影响更大。
从上述分析可以知道,轴承和 转子整合的刚度比单一部件的 刚度更低。
从图1-10表示了在不同转子刚度 的情况下的振动响应,从图中可 知在相同的轴承刚度情况下转子 刚度越大振动越平缓,临界转速 越高。
转子系统动力学基础与数值仿真
转子系统动力学基础与数值仿真文章标题:深度探讨转子系统动力学基础与数值仿真导言在工程领域,转子系统动力学是一个重要且复杂的领域。
它涉及到机械系统运动、振动和稳定性等多方面的知识,对于工程设计和优化具有重要意义。
本文将深入探讨转子系统动力学的基础理论和数值仿真方法,帮助读者全面理解这一领域的重要性和复杂性。
一、转子系统动力学基础1. 转子系统概述转子系统是指由轴承支撑的旋转部件,其运动状态受到外部激励和结构自身特性的影响。
在机械系统中,转子系统承担着能量传递和转换的重要任务,因此其动力学特性对系统的稳定性和可靠性具有重要影响。
2. 转子系统动力学理论转子系统动力学理论涉及到转子系统的振动、稳定性和动力学特性等方面的内容。
通过对转子系统的动力学建模和分析,可以深入理解其运动规律和受力特点,为系统设计和运行提供重要参考。
二、数值仿真方法1. 数值仿真概述数值仿真是指利用计算机模拟和计算工程问题的解决方法。
在转子系统动力学中,采用数值仿真方法可以有效地分析系统的振动特性和稳定性,为系统设计和优化提供重要参考。
2. 有限元方法在转子系统动力学中的应用有限元法是一种常用的数值仿真方法,通过将复杂的转子系统分割为有限数量的小单元,利用数值计算方法求解系统的振动和稳定性问题。
有限元方法在转子系统动力学中得到了广泛应用,并取得了丰富的研究成果。
3. 基于数学建模的仿真技术除了有限元方法,转子系统动力学的数值仿真还可以采用基于数学建模的技术,如多体动力学模型、流体动力学模型等。
这些方法可以更加贴近实际工程问题,为系统的动力学分析提供更加准确和全面的结果。
总结与展望通过本文的深入探讨,我们对转子系统动力学的基础理论和数值仿真方法有了更加全面和深入的理解。
掌握转子系统动力学基础与数值仿真方法,对于工程领域的工程设计和优化具有重要意义。
希望本文可以为读者提供有价值的参考,激发更多人对转子系统动力学领域的关注和研究。
个人观点转子系统动力学是一个复杂而又具有挑战性的领域,它涉及到多学科的知识和全面的工程实践。
转子动力学基础pdf

转子动力学基础pdf
转子动力学是研究旋转系统的运动规律和振动特性的一门学科。
它主要涉及到刚体力学、动力学和振动学的知识,研究的对象包括各种旋转机械设备,如发电机、风力发电机、涡轮机、离心机等。
转子动力学基础包括以下几个方面:
1. 刚体力学:研究刚体的运动规律和受力情况。
在转子动力学中,我们将转子看作刚体,通过刚体力学理论分析转子受到的力和力矩,从而推导出转子的运动方程。
2. 动力学:研究物体的运动与受力之间的关系。
在转子动力学中,我们考虑转子受到的旋转力和惯性力的影响,通过牛顿第二定律和角动量定理等动力学原理,推导出转子的旋转运动方程。
3. 振动学:研究物体的振动特性。
在转子动力学中,由于旋转机械设备的运行过程中会产生振动,因此需要考虑转子的振动特性。
通过振动学理论,可以分析转子的固有频率、振型和振动幅值等参数,从而评估转子的稳定性和安全性。
4. 转子不平衡:转子不平衡是导致旋转机械设备振动和噪声产生的主要原因之一。
在转子动力学中,我们需要研究转子的不平衡现象,并通过对不平衡力的计算和分析,找到相应的解决方法,如平衡校正或使用动平衡系统。
5. 轴承动力学:转子在运行过程中需要依靠轴承支撑和导
向,轴承的性能将直接影响到转子的运动和振动特性。
因此,研究转子动力学还需要考虑轴承的摩擦、刚度和阻尼等特性,在设计和分析中进行综合考虑。
总之,转子动力学基础涉及到刚体力学、动力学、振动学以及轴承动力学等多个学科的知识。
通过对这些基础理论的研究和应用,可以更好地理解和掌握旋转机械设备的运动规律、振动特性以及相关问题的解决方法。
转子动力学基础-ANSYS-APDL和ANSYS-Workbench对比
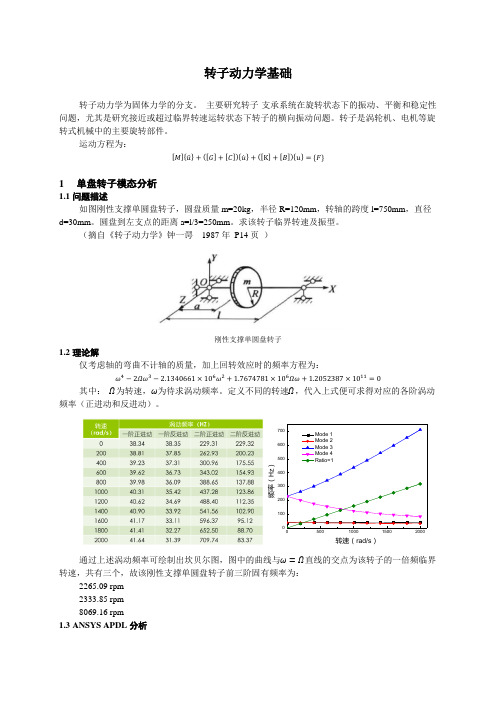
图6中A代表椭圆的长轴、B代表椭圆的短轴,圆盘1的轴心轨迹是半径为0.797e-4m的圆,圆盘2的轴心轨迹是轨迹为半径0.308e-4m的圆,与理论解一致。
3
3.1
如图所示的电机含有两个转子:内转子和外转子。
内转子是一根实心轴,较长;它的两端通过轴承与机架相连;在两端距离轴承不远的地方装有两个圆盘(图中没有绘制,在有限元分析中圆盘会用质量单元表示),而且右边的圆盘上存在不平衡质量,该不平衡质量产生了不平衡的力(f0= 70e-6kg·m)。
(1)7号节点(内转子上)和12号节点(外转子上)的幅值与频率的关系图。也就是要绘制这两个点的幅频关系曲线。
(2)在某一个给定频率处的转轴轨迹图。
(3)在某一个给定频率处转轴的涡动动画。
注:例子来自ANSYS help中转子动力学——8.7. Example Unbalance Harmonic Analysis。
这是一个有关 的8次代数方程,对于给定的 ,可解出4个正向涡动角速度和4个反向涡动角速度。
绘制涡动角速度随自转角速度变化曲线可得坎贝尔图,令 分别等于± 代入频率方程,即可分别解出在同步正涡动和同步反涡动下的临界转速。
表1临界转速
所谓转子的临界转速通常是指同步正向涡动时的临界转速。对于本算例的两圆盘转子系统,临界转速只有两个,即1158r/min和3183r/min。
在后处理中采用PLVAR命令输出圆盘1和圆盘2节点的总位移变化曲线。
圆盘节点位移随激励频率变化关系
从图2可以看出,曲线在19.2Hz和52.7Hz出现峰值,该两个峰值频率对应同步正进动(涡动)临界转速1152rpm和3162rpm,与模态分析结果相对应。
当频率为19.2Hz时,采用PLORB命令得到转子系统的轴心轨迹图如下。
转子动力学知识
转子动力学知识2转子动力学主要研究那些问题?答:转子动力学是研究所有不旋转机械转子及其部件和结构有关的动力学特性,包括动态响应、振动、强度、疲劳、稳定性、可靠性、状态监测、故障诊断和控制的学科。
这门学科研究的主要范围包括:转子系统的动力学建模与分析计算方法;转子系统的临界转速、振型不平衡响应;支承转子的各类轴承的动力学特性;转子系统的稳定性分析;转子平衡技术;转子系统的故障机理、动态特性、监测方法和诊断技术;密封动力学;转子系统的非线性振动、分叉与混沌;转子系统的电磁激励与机电耦联振动;转子系统动态响应测试与分析技术;转子系统振动与稳定性控制技术;转子系统的线性与非线性设计技术与方法。
3转子动力学发展过程中的主要转折是什么?答:第一篇有记载的有关转子动力学的文章是1869年Rankine发表的题为“论旋转轴的离心力”一文,这篇文章得出的“转轴只能在一阶临界转速以下稳定运转”的结论使转子的转速一直限制在一阶临界以下。
最简单的转子模型是由一根两端刚支的无质量的轴和在其中部的圆盘组成的,这一今天仍在使用的被称作Jeffcott转子的模型最早是由Foppl在1895年提出的,之所以被称作“Jeffcott”转子是由于Jeffcott教授在1919年首先解释了这一模型的转子动力学特性。
他指出在超临界运行时,转子会产生自动定心现象,因而可以稳定工作。
这一结论使得旋转机械的功率和使用范围大大提高了,许多工作转速超过临界的涡轮机、压缩机和泵等对工业革命起了很大的作用。
但是随之而来的一系列事故使人们发现转子在超临界运行达到某一转速时会出现强烈的自激振动并造成失稳。
这种不稳定现象首先被Newkirk发现是油膜轴承造成的,仍而确定了稳定性在转子动力学分析中的重要地位。
有关油膜轴承稳定性的两篇重要的总结是由Newkirk和Lund写出的,他们两人也是转子动力学研究的里程碑人物。
4石化企业主要有哪些旋转机械,其基本工作原理是什么?汽轮机:将蒸汽的热能转换成机械能的涡轮式机械。
(完整版)转子动力学基础

4
两边对时间求两次导数得:
代入牛顿方程得 o点的运动微分方程
根据动量矩定理,可得圆盘绕重心c转动的微分方程:
I&& T ke(x cos y sin) 对于稳态涡动, && 0 &
2020/2/19
5
代入牛顿方程得 o点的运动微分方程
及支反力幅值F。
解:弹性轴质量: ms ( 1.52 ) / 4 57 7.8 10-3 0.7856 kg
圆盘质量: mD ( 16 2 ) / 4 2 7.8 10-3 3.137 kg
弹性轴中点刚度:
k 48EJ / l3 (48 20.58 106 1.54 ) /(573 64) 1325 .553 N / cm
不计轴质量时临界转速:
cr
60
2
k 30 12325.553103 1962.96r / min
mD
3.137
2020/2/19
13
计入弹性轴等效质量,按照振动理论,梁在中点的等效质 量为原质量的17/35,则临界转速为:
cr
60
2
k mD+ms17 / 35
30
arctan
10/2/19
/ p
/ p
8
= p
r= e
0
低转速区 圆盘重边飞出
2020/2/19
p
r? e
90
共振区
? p
re
180
高转速区
圆盘轻边飞出; 自动定心或质心转向
9
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
2020/7/12
21
欧拉角表示的刚体绕定点转动的运动为
或
§1.2.2 刚体绕定点运动的角速度及速度分布 刚体的角速度为
所在的位置或称为刚体绕定点转动的瞬时转动轴,瞬时转
动第轴一时种刻定不义同法,得但到总矢通量过定向点定。坐标系投影得
2020/7/12
22
利用方向余弦关系得
向动坐标系投影得
L'p
d dt
H
圆盘在轴上的反力矩: L p L'p
圆盘的回转力矩: LpH sinJp
2020/7/12
31
回转效应:由于高速旋转圆盘的偏摆运动而使临界转速变 化的现象(见图1-15)。
§1.3.1 单盘偏置转子运动微分方程
假设:无阻尼、无偏心
不计轴质量
如图1-15,圆盘的轴线在空间
画出的轨迹是个锥面。
及支反力幅值F。
解:弹性轴质量: m s ( 1 .5 2 )/4 5 7 .8 1- 3 0 0 .78 kg 5
圆盘质量: m D ( 1 2 )/6 4 2 7 .8 1 - 3 0 3 .1k 3g 7
弹性轴中点刚度:
k 4 E / l 8 3 ( J 4 2 . 8 5 0 1 6 8 0 1 . 5 4 ) / 5 ( 3 6 7 ) 1 4 . 5 3 N / c 5 2
9
临界转速定义(ISO):系统(位移)共振时主响应的特征转速。
主响应:轴颈运动或转子挠曲
对于Jeffcott转子,临界转速对应
常以ωcr或ωc表示,若以转/分或转/秒为单位,则有
或
将转子挠度表达式代入临界转速条件得
解得
可见,阻尼总使临界转速大于横向振动固有频率,与机械振 动中的阻尼使固有频率降低作用相反。
式中:
弹性轴无阻尼横向振动固有频率 相对阻尼系数
运动微分方程与线性阻尼系统强迫振动相同,可设解为
2020/7/12
6
代入运动微分方程解得:
arctan
2 p p2 2
ψ
o点作圆周运动,参照极坐标几何关系:
故运动半径为轴的动挠度r,ψ为动挠度r与偏心矩e间的相
位差,且有:
e2
rr
(p2 2)2 (2 p)2
第一章 转子动力学基础
本章主要内容: 1. 涡动分析、临界转速 2. 重力影响 3. 弹性支承影响 4. 非轴对称转子影响、稳定性问题 5. 初始弯曲影响 6. 等加速过临界的特点
2020/7/12
1
第一节 转子的涡动
旋转的转子是具有质量和弹性的振动系统,这与其他振动 系统相同。
区别:转子是旋转的 涡动:既有自转,又有公转,是一种复合运动。
不计轴质量时临界转速:
cr2 6 0m kD3 0 123 ..5 1 35 3 213 7 5 30 19.96 r6 /m 2 in
2020/7/12
13
计入弹性轴等效质量,按照振动理论,梁在中点的等效质 量为原质量的17/35,则临界转速为:
c r2 60 m D + m k s 1/3 7 5 30 3 .1 1 3 0 2 ..7 5 7 3 8 5 1 1 2 3 5 /3 0 3 7 5 6 5 18 .3 r/5 m 3in
为刚体对ox、oz 轴的惯性积
对一般具有圆截面的均质轴对称转子有
对均质薄圆盘有
式中:m——圆盘质量
R——圆盘半径
类似可得
于是
2020/7/12
26
如果oxyz为刚体对o点的主惯性轴,则各惯性积为零,即
于是有
I xy Iyz= Izx= 0
H o I x x i I y y j I z z k
2020/7/12
4
两边对时间求两次导数得:
代入牛顿方程得 o点的运动微分方程
根据动量矩定理,可得圆盘绕重心c转动的微分方程:
I T k e ( x c o s y s i n )
对于稳态涡动, 0
2020/7/12
5
代入牛顿方程得 o点的运动微分方程
化为标准形式为:
理论力学:刚体运动可分解成随基点的平动和绕基点的转 动。
平动运动规律与基点选择有关;
转动运动规律与基点选择无关。
§1.2.1 描述定点刚体位置的欧拉角
刚体球铰定点约束:约束三个平动自由度;
只有三个转动自由度。
2020/7/12
16
定坐标系oxyz与动坐标系的关系 oxyz见表1-1和图1-6
为原点的动坐标系 oxyz是刚体的惯性主轴,惯性矩分别
是 Ix、Iy、Iz,则刚体的动能为
通常转子沿oz轴方向的运动为二阶小量,可忽略不计,即 有 z(t)=0
故转子的动能计算公式为
2020/7/12
28
第三节 单盘偏置转子的涡动、回转效应
转动惯量:反应刚体质量分布的力学参数。 中心极转动惯量:J p 绕通过执行的对称轴的转动惯量。 中心直径转动惯量:J d 绕通过质心的任一直径的转动惯量 均值等厚度圆盘,其转动惯量为:
当转子系统阻尼很小时,可近似认为: cr p 此时有
2020/7/12
10
ω=p时,φ≡π/2,与阻尼系数ξ大小无关,利用这一特 点可测取转子系统的p,在小阻尼情况下可近似为临界转速。
当ξ=0时,ω«p时,φ=0,o、 o、 c三点在一条直线上
ω»p时,φ=π,o、 o、 c三点在一条直线上
支反力幅为:F=kr=235.68N 轴承力与重力之比为:(m s F m D)g(0.7283 .5 635 .1 6 83 ) 76.131
2020/7/12
15
第二节 刚体绕定点的转动
力学模型:连续质量模型——弹性体
集中质量模型——盘轴系统
本章以盘轴系统为分析模型
刚体在空间有六个自由度:沿三个垂直轴方向的平移和绕 这三个轴的转动。
ω≠p,主要是陀螺力矩影响。
2020/7/12
同步正进动轴的受力
12
例:已知:轴长l=57cm,直径d=1.5cm,轴材料弹性模量
E2.5 0 8 160 N/c2 m ,圆盘厚度h=2cm,直径D=16cm,材
料密度 7.81- 03kg/cm ,3 不计阻尼。
求:1)临界转速ωcr
2)e=0.1cm,ω=0.6ωcr;ω=0.8ωcr时的动挠度r
Hc
ri
m(i
vi
'
ri
ri
)
=
m(i
ri
•
ri
)
-
m
i
r(i
•
ri)
=
mi ( xi'2
y
' i
2
z
' i
2
)
miri (
x xi'
y
y
' i
z
z
' i
)
2020/7/12
25
向动坐标系投影得
式中:
为刚体对 ox轴的惯性矩
Ixy mixiyi 为刚体对ox、oy 轴的惯性积
ω=0.6ωcr时挠度为:
r(cr/ e)21(1/00 .6 .1 )210.05c 6m 25
支反力幅为:F=kr=74.562N
轴承力与重力之比为: F 7.5 4621.940
(m sm D)g (0.78 53.1 63 ) 7
2020/7/12
14
ω=0.8ωcr时挠度为:
r(cr/ e)21(1/00 .8 .1 )210.17c7m 8
不平衡力引起的同步正进动分析
2020/7/12
2
第二节 Jeffcott转子涡动分析
Jeffcott转子:垂直安装等截面对称转子、不计重力影响。
一、Jeffcott转子运动微分方程
Jeffcott转子示意图
薄盘:h/D<0.1;偏心矩:e
定坐标系:oxyz;基点:o 设自转ω为常数,确定 o的运动:
一般情况下的矢量关系如图1-9。
若刚体对动坐标系I x I y ) y z
2020/7/12
•
Ly I y y (I y I z )zx
•
Lz I z z (I z I x )zx
——欧拉动力学方程
27
§1.2.4 刚体运动的动能 能量定理、拉个朗日方程——运动微分方程 设刚体质量为m,基点运动方程为x(t)、y(t)、z(t),以基点
故可以用x(t)、y(t)、φ(t)、α(t)、β(t)确定圆盘空间位置, 描述运动状态。
(t)t
2020/7/12
7
e2
rr
2
ep2
(p22)2(2p)2
(1p22)2(2p)2
2
arctan
2 p p2 2
arctan1(p)2
p
2020/7/12
/p
/p
8
p re 0 低转速区 圆盘重边飞出
2020/7/12
p re 90
共振区
p re 180
高转速区
圆盘轻边飞出; 自动定心或质心转向
关系式为: (x,y,z) (x,y,z)
2020/7/12
17
各方向余弦存在关系:
因此,九个方向余弦中只有三个是独立的(自由度数)。 方向余弦求解复杂,采用夹角——欧拉角表示,多种定义。 1、第一种定义(图1-7): 1)动坐标与静坐标重合,先绕oz轴转动ψ角——进动角; 到达oNN1z,oN称为节线,右手法则 2)绕oN轴转θ角——方位或挠曲角;
为分析方便,建立如下坐标系:
(图1-16、图1-17)
1)定坐标系:oxyz
2)随o点平移坐标系:oxyz 3)固联于o动坐标系:o '