ADS-B抗干扰阵列天线幅相误差的无源校正
一种导航宽带抗干扰中的阵列幅相误差校正算法

一种导航宽带抗干扰中的阵列幅相误差校正算法王晓君;李玉莹;王彦朋【摘要】针对复杂电磁环境下抗干扰导航接收机中存在的幅相误差问题,提出一种幅相误差有源校正的导航接收机抗干扰算法;该算法通过干扰和幅相误差构建阵列幅相误差数学模型;然后基于加权子空间拟合原理和最小二乘的方法估计阵列幅相误差系数;最后利用线性约束最小方差(LCMV)算法对修正的之后的接收数据进行干扰的抑制;并明确提出了导航抗干扰接收机的通道修正的解决方案.理论分析和仿真实验表明,估计的幅相误差系数与实际幅相误差非常接近;此方法可以准确在干扰方向上形成零陷并保留导航信号;信噪比在-10 dB的时候,幅相误差估计值逐渐收敛于真实值;并且随着信噪比的增加幅相误差估计精度也逐渐提高.所提算法能有效提高存在幅相误差通道的抗干扰的性能.【期刊名称】《科学技术与工程》【年(卷),期】2018(018)028【总页数】5页(P123-127)【关键词】幅相误差;阵列校正;自适应抗干扰;子空间拟合;线性约束最小方差准则【作者】王晓君;李玉莹;王彦朋【作者单位】河北科技大学信息科学与工程学院,石家庄050000;河北科技大学信息科学与工程学院,石家庄050000;河北科技大学信息科学与工程学院,石家庄050000【正文语种】中文【中图分类】TP802+.6卫星导航接收机中自适应阵列信号处理技术可以高效地抑制干扰,从而保留接收到的有用信号,使阵列输出的信干噪比达到最大。
智能天线波束形成技术研究阵列天线主瓣的形状和旁瓣电平的高低,主瓣对准期望用户,旁瓣对准干扰信号[1—4]。
由于干扰会对期望信号带来危害,智能天线能够在干扰方向形成零陷。
但是,由于实际环境中的各种天线阵元的电磁特性的不一致、阵元位置扰动、阵元间互耦等各种影响,虽然实际工程中会对幅相误差进行校正;但是仍然有剩余幅相误差的存在;并且对形成零陷深度有很大的影响。
为了消除阵列误差的影响,许多校正算法被提出;主要分为有源校正算法和自校正算法[5]。
浅析ADS-B技术原理和常见故障分析
发送[1]。
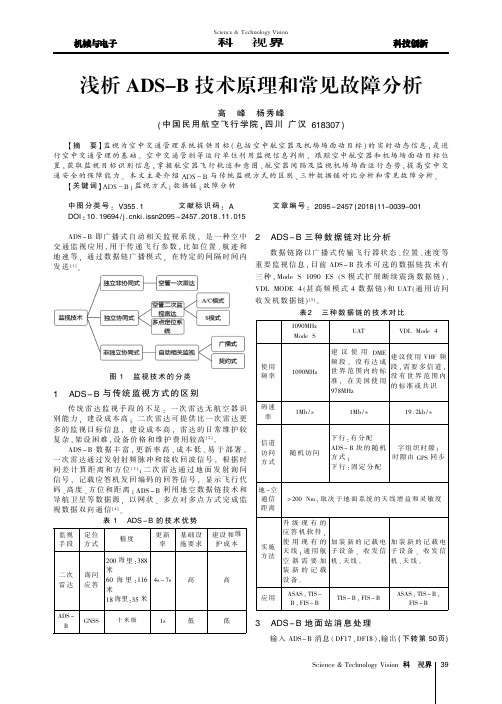
图1监视技术的分类1ADS-B与传统监视方式的区别传统雷达监视手段的不足:一次雷达无航空器识别能力,建设成本高;二次雷达可提供比一次雷达更多的监视目标信息,建设成本高,雷达的日常维护较复杂,架设困难,设备价格和维护费用较高[2]。
ADS-B数据丰富,更新率高、成本低、易于部署。
一次雷达通过发射射频脉冲和接收回波信号,根据时间差计算距离和方位[3];二次雷达通过地面发射询问信号,记载应答机发回编码的回答信号,显示飞行代码、高度、方位和距离;ADS-B利用地空数据链技术和导航卫星等数据源,以网状、多点对多点方式完成监视数据双向通信[4]。
表1ADS-B的技术优势监视手段定位方式精度更新率基础设施要求建设和维护成本200海里:388(上接第39页)CAT021报告图2地面站消息处理过程4本场ADS-B常见故障及处理1)正常飞行时,在所有ADS-B终端上运动的飞机有时会卡住不动。
(1)检查交换机、服务器及GBT地面收发机,未发现异常。
(2)检查终端与服务器的网络连接状况,无异常。
检查室外天线完好无异常无委协关闭干扰源。
器黑屏无显示图1CAREM施工现场电厂控制由分散的控制系统进行,基于电脑控制并具有高可用率。
设有两套多用化保护系统:初次反应堆保护系统(FRPS)和二次反应堆保护系统(SRPS),每个系统有四套冗余。
设有两套多样化核仪表系统(NIS),分别用于FRPS和S RPS。
8设计和审批状态图2CAREM一体化主回路审批过程后,原型机组的建造已同股东关于部件制造的合同已了环境影响研究。
非核厂房的。
【参考文献】modular reactors,https://www. reactors.ARIS,Advances in Small Modular Reactor 2016Edition.Modular Reactors(SMR)Feasibility .。
ADS—B信号干扰的现象与处置方法

和地面站 的传输采用单一的共 同频率 9 7 8 MHz的频道 , 传输
A u t o ma t i c De p e n d e n t S u r v e i l l a n c e— B r o a d c a s t ( ADS - B ) 速率为 I Mb i t / s , 这种单一 的频道结构保证 了准确无误的空. 空
A DS . B系 统 G NS S 信 息丢 失 的主 要 原 因 包括 飞机 上 其 他
位置信息 。这也是 ADS . B系统最致命 的缺陷 。
将 位 置 信 息 转 换成 数字 码 。该 数 字 码 结合 其它 一些 信 息 ( 如 机载系统的干扰, G DL 9 0自身原因以及 G P S天线故障。 在此
学院校 园网实现 了该系统在 六个机场之 间的网络互连 , A DS . B作为飞行学院重要的监视设备 , 为飞行学院的飞行安
全提供 了重要保障。但 是在使用 中出现 了信号丢失现象。故本项 目主要对 A DS . B的工作原理和数据链 以及常见故 障的介绍 , 针对新津分院在 ADS — B 的应用 中发现的信号干扰 的处置方法 , 找寻信号干扰情况下的最优处置方法。 关键词 工作原理 数据链 故障 处置方法
Hale Waihona Puke 数量成倍 的增加 ,使得空管识别工作 中存在的干扰 等问题也 链 配 置 。
日趋 严 重 。所 有 这 些 对 AD S . B 在 高 密 度 环境 下有 效预 防干 扰 和 应 急处 置 提 出 了更 高 的 要求 。 1 概 述 UA T为 宽 频数 据 链 , 频 宽在 l ~2 MH z之 间 , 工作 于 L 波段 , 通 讯 范 围在 9 6 0~ l 2 1 5 MH z , 在U A T ADS . B 航 空 器
一种基于ADS-B的雷达误差实时融合校正算法

DO I :1 0 . 3 9 6 9 / j . i s s n . 0 2 5 8 . 2 7 2 4 . 2 0 1 3 . 0 1 . 0 1 6
一
种基 于 A D S - B的 雷达 误 差 实 时 融合 校 正算 法
吴振 亚 , 王 明辉 , 张瑞平 , 阿都建 华 , 胡 俊
第48 卷
第 1 期
西
南
交
通
大
学
学
报
Vo 1 . 48 No.1 F e b. 2 01 3
2 0 1 3年 2月
J O URN AL O F S OU T HW E S T J I AO T ONG UNI VE RS I T Y
文章编号 : 0 2 5 8 - 2 7 2 4 ( 2 0 1 3 ) 0 1 - 0 1 0 2 - 0 6
s u r v e i l l a n c e — b r o a d c a s t ,A D S - B ) 机载设 备 , 监视精 度不高的问题 , 结合雷达误差模 型理论 , 提出了基于 A D S — B数据 的雷达误差实时校正算法 . 该算法对同一时刻获得 的多组 A D S — B数据 与雷达数据 的差值进 行数据融合 , 得到该
ADS- B- Ba s e d Al g o r i t h m f o r
Re a l - Ti me Opt i ma l Es t i ma t i o n o f Ra da r Bi a s e s
WU Z h e n y a , W A NG Mi n g h u i , Z H A NG Ru i p i n g , A DU J i a n h u a ’ , HU J u n ( 1 .C o l l e g e o f C o m p u t e r S c i e n c e ,S i c h u a n U n i v e r s i t y ,C h e n g d u 6 1 0 0 6 5 ,C h i n a ; 2 .T h e S e c o n d R e s e a r c h I n s t i t u t e o f
阵列天线相位中心的校准方法及误差分析
阵列天线相位中心的校准方法及误差分析陈曦,傅光,龚书喜,阎亚丽,刘海风【摘要】摘要:为精确标定阵列天线的相位中心,提出一种校准阵列天线相位中心的方法.首先推导出阵列天线相位方向函数与天线位置偏移量的关系式,再根据阵列天线相位中心的定义和校准步骤,运用最小二乘法计算出相位中心的精确值,并对提出的校准方法进行了模拟实验验证.实验证明该校准方法可以有效地计算出阵列天线相位中心的位置.对计算结果的误差分析表明,较宽的阵列天线波束宽度和较高的相位测量精度都可以提高相位中心的校准精度.【期刊名称】西安电子科技大学学报(自然科学版)【年(卷),期】2011(038)003【总页数】5【关键词】阵列天线;相位中心;视在相心;校准;误差分析阵列天线已经被广泛地应用于各种雷达系统[1].随着对雷达系统的跟踪及定位性能要求的提高,在某些情况下,仅靠主瓣波束的幅度特性来搜索、定位已不能满足精度要求,必须以阵列天线的相位中心为参考基准进行精确定位和测量[2].对于寻找天线相位中心,前人已进行了一些研究并得出一些有效的结论,但大多数都是针对单天线的研究[3-4],如喇叭天线、对数周期天线等,而关于阵列天线相位中心的研究甚少,只有文献[5]稍有提及.在研究对数周期天线的相位中心时,笔者对直线阵相位中心存在的条件进行了研究,得出了一些有意义的结论.笔者将给出阵列天线的相位方向函数与相位中心的关系式,并应用最小二乘法得出一套校准阵列天线相位中心的简便方法.1 基本原理在图1中,阵列天线位于位置1和位置2时,在远场会得到不同的场表达式.若阵列天线的单元特性都相同,阵列在无限远场的电场主极化分量均可表示为其中,C是常数;是阵列单元的加权幅度和相位;是单元的复方向函数,包含幅度和相位信息;波数k==ρq+M.如图1所示,结合表达式(1),位置1和位置2的相位方向函数与天线位置的调整量M满足[6]2π/λ;rq是单元q到远场点的距离,ro是r方向的单位矢量,uo是电场的主极化方向单位矢量,且有uo·ro=0;ρq是第q个单元在参考坐标系下的位置矢量;Ψ(ro)即阵列天线的相位方向函数.设阵列天线从位置1到位置2的移动量为M,则阵列天线的相位中心是天线上或其周围存在的一个点,该点可使天线远场主瓣半功率波瓣宽度内的相位分布是一个常数.实际上天线的相位分布都不会是一个常数,所以定义一个可使天线远场主瓣半功率波瓣宽度内的相位分布最平坦的点,称该点为视在相位中心,简称视在相心.一个天线不一定有相位中心,但一定可以求出视在相心.天线位于位置1时,测量得到相位分布Ψ1(ro).将天线阵的几何中心移动M后,再次测量得到的Ψ2(ro)是最平坦的.根据视在相心的定义,式(2)中的Ψ(r)不是常数,但可求出线性最小二乘意义[7]下的最平坦2o值.将式(2)写为其中,ri是主瓣半功率波瓣宽度内的第i个方向的位移矢量,是第i个方向上相位值的偏差量.令求出使ε最小的M值,即得到视在相心所在.在图2所示的直角坐标系下,有M=,则在主平面内,式(4)可写为其中,表示视在相心横向坐标;表示视在相心纵向坐标; 当φ =0°时,tm=xm;当φ=90°时,tm=ym.式(5)两边分别对t、z和C求导,并令其为0,可得如下线性方程组:解该方程组可得到视在相心所在.2 模拟实验为了验证上述校准方法的有效性和正确性,在HFSS中分别建立了8元、14元和20元的泰勒分布直线阵进行模拟仿真实验.工作频率均为340MHz,单元为半波振子,单元间距为0.7λ.半波振子的相位中心位于振子的几何中心,阵列模型是理想阵列,不存在各种工程误差,因此,天线阵的相位中心应位于其几何中心.为对计算结果进行比较,实验前有意将几何中心偏离参考系原点,天线位置如图3所示.在初始状态下,阵列天线的几何中心在参考系下的坐标为(-500mm,-500mm),通过上述的校准方法计算出天线位置的调整量,进而移动天线以消除这一偏离量,使得远场相位分布最平坦.在实验中,模拟仿真得到的相位值可以精确到1°×10-15.在实际测量中,由于受测量精度的限制,读数精度有限,因此读数时取精度为0.1°和1°×10-3两种情况来作对比,计算结果记录在表1中.表1中校准误差定义为校准误差越小,校准精度越高.从表1 中的数据可以看出,当相位值的读数精度为0.1°时,阵列单元数较小的阵列校准误差较小.经过计算,3种阵列的横向校准误差都远小于纵向校准误差.当相位值的读数精度为1°×10-3时,3种阵列的校准误差都很小,且相差不多.图4是20元直线阵在校准前和校准后主瓣内相位分布,经校准,主瓣半功率波瓣宽度内相位值的最大最小差仅为0.1°.3 误差分析3.1 横向分量和纵向分量的校准精度在上面的实验中,计算值与理论值并不能完全重合,并且横向和纵向的校准精度差别很大,在此对其进行数学分析.在直角坐标系下,式(2)可表示为其中Ψ1(θ) 是已知量.当相位随角度变化时,式(7)两边对θ求导可得式(8)两边再分别对tm和zm求偏导可得式(9)表明tm和zm对Ψ2(θ)变化量的影响是不一样的.对于主瓣宽度较窄的阵列天线,即θ的取值都较小,tm对Ψ2(θ)变化量的影响要远大于zm对其的影响,即tm对Ψ2(θ)的变化量是敏感的,而zm相对不敏感;波束宽度越小,这种敏感度的差异越大.因此,对于窄波束的阵列天线,横向分量tm容易确定,而纵向分量zm 不易确定;随着波束的展宽,纵向的校准精度会显著提高.3.2 主瓣宽度对校准精度的影响在实验中,不同单元数阵列天线的校准误差差别较大,笔者推断是由主瓣半功率波瓣宽度不同造成的,以下给出分析过程.若在位置1时,阵列的相位中心位于参考系原点,则有Ψ1(θ)=C,式(7)可化为分别考虑 tm及 zm对Ψ2(θ) 相位值的影响,得可知tm主要造成主瓣内相位方向图的倾斜,zm主要造成主瓣内相位方向图的凹凸. 在半功率波束宽度θ3dB范围内,由t和z引起的Ψ(θ)的最大最小值的差Δ可分别表示为因此,可以推导出根据式(13),得出在不同的Δ下tm和zm随θ3dB的变化规律示于图5和图6.Δ与测量精度和读数精度有关.从图5和图6可以看出,当Δ不为零时,求出的相位中心并不是一个确定的点,而是一个范围,定义其为“视在相心区”,只要相位中心的偏差不超出这个范围,都可满足相位值的平坦分布.例如前节实验中的20元直线阵,主瓣宽度为4.56°,若要求Δ≤0.1°,则tm小于3.12mm,zm小于304mm即可.实验中得到的tm和zm均可较好地落入此区域,校准后的相位差也证明了这一点.此外,从图5和图6中还可看出,随着主瓣半功率波瓣宽度的展宽以及Δ减小,视在相心区都会逐渐缩小.可以预见,当Δ趋于0时,这个范围将缩小为一个点,即理想的相位中心.在实际测量中,测量精度是有限的,并且存在测量误差.对于阵列天线的窄波束,相位中心很难惟一确定,但通过文中测量方法得到的相位中心已经可使远场相位分布很平坦.若要提高校准精度,在波束宽度不再改变时,提高测量精度是关键.4 总结通过理论推导,笔者提出了一种根据相位测量值校准阵列天线相位中心的方法,并通过仿真实验对该方法进行了验证.实验结果表明,该方法可以有效地计算出相位中心的位置.对实验结果的误差分析表明,阵列天线相位中心的横向分量(tm)比纵向分量(zm)难确定,这主要是由阵列天线的窄波束造成的,但随着主瓣宽度的增加,校准精度会提高,同时,提高测量精度和读数精度也可以提高校准精度.参考文献:[1]袁宏伟,龚书喜,王文涛.一种分析大型阵列天线散射的新方法[J]. 西安电子科技大学学报,2010,37(1):113-118. Yuan Hongwei,Gong Shuxi,Wang Wentao.New Method for Analysis of Scattering of the Large Array Antenna [J].Journal of Xidian University,2010,37(1):113-118.[2]尚军平,傅德民,邓颖波. 天线相位中心的精确测量方法研究[J]. 西安电子科技大学学报,2008,35(4):673-677.Shang Junping,Fu Demin,Deng Yingbo.Research on the Accurate Measurement Method for the Antenna Phase Center [J]. Journal of Xidian University,2008,35(4):673-677.[3]Cruz J L,Gimeno B,Navarro E A,et al.The Phase Center Position of a Microstrip Horn Radiating in an Infinite Parallel-Plate Waveguide [J].IEEE Trans on AP,1994,42(8):1185-1188.[4]唐璞,李欣,王建,等. 计算天线相位中心的移动参考点法[J]. 电波科学学报,2005,20(6):725-728. Tang Pu,Li Xin,Wang Jian,et al.Calculation of Phase Center for the Antenna with the Method of Moving Reference Point [J]. Chinese Journal of Radio Science,2005,20(6):725-728.[5]金元松,任晓飞,冀海鸣,等. 对数周期偶极子天线全空间可变相位中心[J]. 电波科学学报,2007,22(2):229-233. Jin Yuansong,Ren Xiaofei,Ji Haiming,et al.Variable Phase Center of the Log-periodic Dipole Antenna in Full Space [J]. Chinese Journal of Radio Science,2007,22(2):229-233.[6]陈曦,傅光,龚书喜,等. 阵列天线相位中心的计算与分析[J]. 电波科学学报,2010,25(2):330-335. Chen Xi,Fu Guang,Gong Shuxi,et al.Calculation and Analysis of Phase Center on Array Antennas [J].Chinese Journal of Radio Science,2010,25(2):330-335.[7]梁昌洪. 从实验数据处理谈起[M]. 西安:西安电子科技大学出版社,1996:18-19.(编辑:郭华)doi:10.3969/j.issn.1001-2400.2011.03.023。
基于ADS-B的雷达系统误差校准算法研究

补 了雷 达 覆 盖 范 围 有 限 、 监 视精 度不 高 的缺 点 。 但 是 由于 A D S—B机 载设 备 昂贵 等 原 因 , 目前 , 我
国 民航 飞 机 大部 分 仍 未 配 备 A D S— B机 载 设 备 。
因此 , 有效利用 已配备 A D S—B机 载 设备 飞 机 的 A D S—B数 据 对 雷 达 的 误差 进 行 实 时 校 准 , 将 大
WAN G Zho n g q i a n g
( C h i n a A c a d e m y o f E l e c t r o n i c s a n d I n f o r m a t i o n T e c h o o l o g y , B e i j i n g , 1 0 0 0 4 1 , C h i n a )
空 中交 通 管 制 中 心 实 现 地 空 监 视 。 利 用 A D S
服系统 、 天线等 因素引起 的, 是一种确定 性误 差。
王忠强 : 基于 A D S—B的 雷 达 系 统 误 差 校 准算 法研 究
3 1
系统 误 差 是 无 法 通 过 滤 波 方 法 去 除 的 。 传 统 的 多 雷 达 融 合 系 统 是 通 过 多 部 雷 达 对 同 一 组 目标 进行 测量 , 将 位 置 矢 量 转 换 到 中 心 坐 标 系 后 根 据
O i l A DS —B wa s p r o p o s e d. At t h e s a me t i me , The p r o c e d u r e o f r e g i s t r a t i o n p r o c e s s i n g h a s be e n g i v e n. Fi n a l l y, Th e s i mu l a t i o n e x p e r i me n t i s a n a l y z e d .The s i mu l a t i o n r e s u l t s s h o w t h a t t h e a l g or i t h m c a n
ADS-B技术在雷达系统误差校正中的应用研究

ADS-B技术在雷达系统误差校正中的应用研究作者:鲁军来源:《科学导报·学术》2020年第75期【摘要】ADS-B(Automatic Dependent Surveillance-Broadcast,广播式自动相关监视)技术是一种空中交通监视技术,利用卫星定位数据,向其他安装ADS-B系统的飞机和地面站自动广播自身的速度和位置等状态信息。
通过ADS-B技术,可以依据雷达探测的飞机坐标数据和ADS-B获取的飞机位置信息,进行雷达误差分析和系统误差校正。
【关键词】ADS-B技术;雷达;系统误差引言雷达测量目标的测量数据中包括两种测量误差:一种是随机误差,可以通过滤波方法消除;另一种是随机误差,在相对较长的时间里可以看做是一个相对固定的值。
为了提升雷达的探测精度,降低多雷达空情信息融合时系统误差带来的影响,需要及时地对雷达系统误差进行检查与校正。
ADS-B技术具有数据精度高、使用成本低、监视能力强等特点。
利用ADS-B数据自动广播的特性,可以获取雷达周边所有安装ADS-B系统的飞机实时位置信息,并用于雷达系统误差的标定。
相对于雷达检飞标定的方法,该方法具有快速、简单和低成本等优势。
1.ADS-B技术概述ADS-B技术是一种基于卫星定位信息和空-空、地-空数据链通信的航空器监视技术[1-3]。
民航飞机通过GNSS(全球卫星导航定位系统)系统自主获取高精度的定位信息,并向其它安装有ADS-B的地面站用户和飞机自动广播其位置、速度等信息。
ADS-B技术原理主要是自动、广播、相关与监视。
其中,自动是指安装有ADS-B系统的飞机会自动向外发送数据而不需要地面询问和人工操作;广播是指ADS-B系统向发送信采取广播方式,附近列装有ADS-B 设备的飞机和地面站用户都能接收和处理这些数据。
相关是指ADS-B系统获取的飞机位置、速度、高度等信息来自于安装有ADS-B系统的飞机;监视是指利用获取的位置、速度等信息能够对飞机进行监视。
ADS-B自适应干扰抑制接收机射频端的设计

ADS-B 自适应干扰抑制接收机射频端的设计胡铁乔,刘亮(中国民航大学天津市智能信号与图像处理重点实验室,天津300300)摘要:针对ADS-B 自适应干扰抑制接收机的特殊需求,设计了一种通道一致性较好的接收机射频端,围绕射频端设计方案、关键组件设计以及性能测试等3个方面展开。
测试结果表明,该射频端具有高增益、低噪声系数、良好的通道一致性等优点,满足ADS-B 自适应干扰抑制接收机的要求,为实现ADS-B 自适应干扰抑制接收机的自主研发提供了参考。
关键词:ADS-B 接收机;干扰抑制;射频端;通道一致性中图分类号:V351.37;TN851文献标志码:A文章编号:1674-5590(2020)03-0001-07RF terminal design and implementation for self-adaptive ADS-B anti-interference receiverHU Tieqiao,LIU Liang(Intelligent Signal and Image Processing Key Lab of Tianjin,CAUC,Tianjin 300300,China )Abstract:Aiming at the special requirements of self-adaptive ADS-B anti-interference receiver,RF terminal with goodchannel consistency is designed involving design scheme,key component design and performance testing.Test results show that the current RF terminal has higher gain,lower noise ratio and better channel consistency,meeting the special requirements of self-adaptive ADS-B anti-interference receiver,and supplying reference forthe independent research and development of which.Key words:ADS-B receiver;interference suppression;RF terminal;channel consistency收稿日期:2019-04-08;修回日期:2019-05-04基金项目:中央高校基本科研业务费专项(3122016A003)作者简介:胡铁乔(1970—),男,河南洛阳人,副教授,硕士,研究方向为基于FPGA 、DSP 高速处理平台的阵列信号处理.低空空域中各种干扰信号日益复杂及信息的公开,使得ADS-B 信号极易受到干扰[1]。
利用双天线相位差的ADSB欺骗式干扰检测方法

Abstract:Comparedwithtraditionalsurveillancesystem,AutomaticDependentSurveillanceBroadcast(ADSB)system hastheadvantagesofahighpositioningaccuracy,fastupdaterate,andlowequipmentcost,andthushasbeenvigorously promotedbytheInternationalCivilAviationOrganization.Butbecauseofitsopenandsharingfeatures,thesystemisvul nerabletovariousspoofingattackwhichseriouslythreatensairtrafficsafety.Inthispaper,weproposeaspoofingattackde tectionmethodusingphasedifferencebetweenthedoubleantenna:forasequenceofAirbornePositionMessageclaimedby samesource,firstly,wecancalculateagroupofvariablestoindicatethedirectionalchangebasedonitsbroadcastcontent; secondly,wecanusethephasedifferencetocomputeanothergroupofvariablesasthereflectionofthedirectionalchange; finally,wecalculatethePearsoncorrelationcoefficientofthetwogroupsofvariablestodeterminewhetherthetargetisare alaircraftoraghostone.Inaddition,consideringthefalseADSBmessagesthatarethesameastheairbornerealtarget ICAOaddressesmayresultinfalsedetection,weproposeasourceconsistencydetectionmethod.Comparedwithother methods,thismethoddoesnotneedtoestimatethedirectionofthesignal,anditisrobusttotheamplitudeandphaseerror ofthearray,andthesimulationexperimentsandpracticaldatahaveverifiedtheeffectivenessofthemethod. Keywords:automaticdependentsurveillancebroadcast(ADSB);spoofingattack;doubleantenna;phasedifference; correlationcoefficient
低复杂度的ADS-B抗干扰阵列天线无源校正算法

低复杂度的ADS-B抗干扰阵列天线无源校正算法王文益;朱特;吴仁彪【期刊名称】《系统工程与电子技术》【年(卷),期】2017(039)009【摘要】The real array manifold and the ideal array manifold may be different due to the gain and phase error, position error and mutual coupling of the array, and these errors need to be calibrated to improve the performance of the array.A passive calibration algorithm is proposed to calibrate the gain and phase error, position error and mutual coupling of the array in the automatic dependent surveillance-broadcast (ADS-B) system.In the proposed method, ADS-B signals broadcasted by the ADS-B system are used as the pilot sources, and the pilot sources do not need to be set manually.The direction of arrival of the pilot sources can be obtained according to the position of the array antennas and the position of the aircrafts, and the errors of the array are finally calibrated by using the direction pared with other algorithms, the proposed method greatly reduces the complexity of the array calibration.The simulation results show the effectiveness of the proposed algorithm.%阵列的幅相误差、位置误差和互耦使真实阵列流形与理想阵列流形有较大偏差,校正这3种误差可以明显提高阵列的性能.针对广播式自动相关监视(automatic dependent surveillance-broadcast,ADS-B)系统,提出了一种同时校正上述3种误差的无源校正算法.通过阵列天线的位置和飞机位置获取校正源的来向信息,并利用该来向信息最终进行误差校正.与其他方法相比,所提方法大大减少了校正阵列的复杂度.仿真结果表明了该算法的有效性.【总页数】6页(P1915-1920)【作者】王文益;朱特;吴仁彪【作者单位】中国民航大学天津市智能信号与图像处理重点实验室, 天津 300300;中国民航大学天津市智能信号与图像处理重点实验室, 天津 300300;中国民航大学天津市智能信号与图像处理重点实验室, 天津 300300【正文语种】中文【中图分类】TN911.7【相关文献】1.ADS-B抗干扰阵列天线幅相误差的无源校正 [J], 王文益;朱特;吴仁彪2.分布式发射天线MIMO OFDM的一种低复杂度频偏校正算法 [J], 孙科;唐友喜;邵士海;邓凯3.一种导航宽带抗干扰中的阵列幅相误差校正算法 [J], 王晓君;李玉莹;王彦朋4.一种提高幅相一致性抗干扰天线单元及抗干扰阵列天线 [J], 陈智达; 彭顺全5.低复杂度单天线ADS-B交织位置检测 [J], 王文益;孟真真因版权原因,仅展示原文概要,查看原文内容请购买。
一种基于ADS-B的雷达系统误差标定方法

一种基于ADS-B的雷达系统误差标定方法
林盛;刘军伟;徐伟
【期刊名称】《舰船电子对抗》
【年(卷),期】2018(041)002
【摘要】广播式自动相关监视(ADS-B)系统采用一种空中交通监视技术,它基于卫星定位数据,对外广播自身的位置和速度等状态信息.提出了一种基于ADS-B的雷达系统误差标定方法.该方法通过匹配雷达点迹和ADS-B信息,然后对匹配成功的点迹位置进行插值计算得到点迹真值位置,最后进行误差分析得到雷达系统误差.实验结果表明本文提出的方法可以对雷达系统误差进行准确标定,该方法具很好的鲁棒性,便于工程实现.
【总页数】4页(P45-48)
【作者】林盛;刘军伟;徐伟
【作者单位】中国电子科技集团公司第三十八研究所,安徽合肥230088;孔径阵列与空间探测安徽省重点实验室,安徽合肥230088;中国电子科技集团公司第三十八研究所,安徽合肥230088;孔径阵列与空间探测安徽省重点实验室,安徽合肥230088;中国电子科技集团公司第三十八研究所,安徽合肥230088;孔径阵列与空间探测安徽省重点实验室,安徽合肥230088
【正文语种】中文
【中图分类】TN95
【相关文献】
1.一种基于ADS-B的雷达跟踪精度计算方法 [J], 孟军;马彦恒;董建;赵喜
2.基于最小二乘估计的雷达系统误差卫星标定方法 [J], 钟霞;张建伟;于灏
3.一种基于ADS-B的雷达性能测试方法 [J], 杨蓓蓓;张洪川
4.一种基于ADS-B信号的二次雷达精度评估方法 [J], 姚渊
5.一种基于ADS-B的雷达威胁空情模拟方法 [J], 王肖洋;刘广建;王昊;赵顺利因版权原因,仅展示原文概要,查看原文内容请购买。
基于空间相关的ADS-B欺骗干扰检测方法

基于空间相关的ADS-B欺骗干扰检测方法
吴仁彪;陈蕾;卢丹
【期刊名称】《中国民航大学学报》
【年(卷),期】2018(036)005
【摘要】随着广播式自动相关监视技术的广泛应用,其安全性问题也引起了高度关注.针对ADS-B系统容易受到的欺骗式干扰,提出了一种干扰检测方法:该方法首先根据报文内容计算坐标空间中的一组变量,其反映目标相对于接收机的方向变化趋势;其次,根据阵列天线接收的信号计算信号空间中一组同样表征此方向变化趋势的变量;最后,通过两组变量的皮尔逊相关系数判别真实目标和欺骗干扰.在此基础上,还提出了一种信源一致性检测方法,以降低误检测概率.所提方法无需估计信号来向,对阵列的幅相误差较为稳健,适合工程实践.
【总页数】6页(P1-6)
【作者】吴仁彪;陈蕾;卢丹
【作者单位】中国民航大学天津市智能信号与图像处理重点实验室,天津 300300;中国民航大学天津市智能信号与图像处理重点实验室,天津 300300;中国民航大学天津市智能信号与图像处理重点实验室,天津 300300
【正文语种】中文
【中图分类】TN911.7;V243
【相关文献】
1.利用多普勒效应的ADS-B欺骗式干扰检测方法 [J], 陈蕾;吴仁彪;卢丹
2.利用双天线相位差的ADS-B欺骗式干扰检测方法 [J], 王文益;李文静;卢丹;王璐;贾琼琼;吴仁彪
3.基于FPGA+DSP的ADS-B欺骗干扰检测优化 [J], 胡铁乔; 李恒昶
4.基于1DCNN-BiLSTM网络的ADS-B欺骗式干扰检测 [J], 王文益;古亭亭
5.一种基于多基线载波相位差测量的欺骗干扰检测方法 [J], 秦明峰;胡丽格;李可歆因版权原因,仅展示原文概要,查看原文内容请购买。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
ADS-B抗干扰阵列天线幅相误差的无源校正王文益;朱特;吴仁彪【摘要】阵列的幅相误差会使真实阵列流形与理想阵列流形有较大偏差,导致阵列性能急剧恶化,甚至失效.根据广播式自动相关监视(ADS-B,automatic dependent surveillance-broadcast)系统的特性,提出一种校正幅相误差的无源校正算法.利用ADS-B系统中飞机广播的ADS-B信号作为校正源,通过其中一个阵元接收的数据求得飞机位置,再加上所测阵列天线位置,通过坐标系转换可求得校正源的来向信息,并利用该信息进行误差校正,可以较准确地估计出阵列的幅相误差,校正后阵列的性能有明显改善.该方法无需额外设置校正源,与其他方法相比,减少了校正阵列时设备的复杂度.仿真结果表明算法的有效性.%The real array manifold and ideal array manifold may be different due to the gain and phase errors of array,and performance of algorithms will be sharply affected by the gain and phase errors.A passive calibration algorithm is proposed to calibrate the gain and phase error of the ADS-B system array.In the proposed method,one of the sensors can be used to obtain the positions of aircrafts,and the position of array antenna can be measured,then the DOA of pilot source is computed through coordinate system transformation,and the array errors are calibrated by using direction information.Gain and phase errors can be accurately estimated by the proposed method,and the performance of algorithms is effetively improved.Performance of calibrated array is highly improved.The extra pilot sources do not need to be set manually,thus the equipment complexity is reduced.Simulation results prove the effectiveness of the proposed algorithm.【期刊名称】《中国民航大学学报》【年(卷),期】2017(035)006【总页数】4页(P7-10)【关键词】广播式自动相关监视;幅相误差;阵列校正【作者】王文益;朱特;吴仁彪【作者单位】中国民航大学天津市智能信号与图像处理重点实验室,天津300300;中国民航大学天津市智能信号与图像处理重点实验室,天津300300;中国民航大学天津市智能信号与图像处理重点实验室,天津300300【正文语种】中文【中图分类】V24;TN911广播式自动相关监视系统是新一代的监视系统,装有ADS-B系统的飞机使用普通全球导航卫星系统(GNSS,globalnavigationsatellitesystem)接收机从 GNSS 星座得到其精确位置,然后将该位置与飞机的状态信息(如速度,航向,高度和航班号)广播给能接收ADSB信号的飞机和ADS-B地面站或通过卫星将飞机的位置和其他信息中继到空中交通管制中心[1-2]。
但是,由于ADS-B技术标准是公开的,很容易受到欺骗式干扰,导致严重后果[3]。
此外,随着技术的发展,也出现了各种各样的干扰设备,如压制式干扰可使ADS-B信号淹没在噪声中[4]。
而ADS-B所在的1 090 MHz频点上,包括二次监视雷达、空中防撞系统、多点定位系统、ADS-B系统、敌我识别器和测距仪等电子系统[5]。
飞机发射的ADS-B信号可能受到这种复杂电磁环境下的多种干扰,造成解码错误。
为了正确解调出ADS-B信号所携带的信息,就必须对各种干扰进行抑制,其中,使用阵列天线是一种非常有效的方法。
大多数抗干扰算法都是基于阵列理想流形,且没有考虑到阵列可能存在的误差。
实际工程应用中,由于各种误差不可避免,实际的阵列流形往往会出现一定程度的偏差或扰动,此时,通常的高分辨率算法的性能会出现严重恶化,甚至失效[6]。
其中阵列的幅相误差对阵列影响很大,因此对阵列幅相误差的校正具有重要的理论意义和实用价值。
现有校正阵列的方法可分为有源校正和无源校正[7],其算法大多是设置辅助信号源,然后测得信号的来向对阵列进行校正,或将校正源旋转一定角度,利用角度差校正阵列。
王敏等[8]提出将阵列的幅相误差进行参数估计,利用经典的Lagrange 乘子法方便地得到最优解来校正幅相误差。
张柯等[9]提出幅相误差快速校正的简化多级维纳滤波器算法,无需估计协方差矩阵和进行特征值分解,大大减小计算量,且具有与特征分解方法相同的幅相参数估计性能。
Ng等[10]根据协方差矩阵特征分解后噪声子空间与真实导向矢量正交,通过解方程组求得阵列的幅相误差。
Fistas等[11]使用不同来向的校正源,不仅校正了幅相误差,还校正了位置误差。
贾永康等[12]在不知辅助信号源来向时,据信号源旋转已知角度对阵列的幅相误差和位置误差进行校正。
无源校正方法无需设置辅助信号源,但需对阵列误差和信号来向进行联合估计,计算量大,且不能保证收敛到最优值[7]。
Friedlander等[13]提出用不断迭代来估计信号来向和幅相误差的自校正算法。
飞机发射空中位置类型的ADS-B信号含有飞机位置信息和阵列天线位置信息(可通过测量得到)。
由于飞机距离阵列天线很远,因此可忽略飞机位置误差和测得的阵列天线位置误差。
由飞机的位置和阵列天线,通过坐标系转换,可求得飞机所发ADS-B信号的波达方向(DOA,direction of arrival)。
本文利用飞机位置这个先验信息,来简化校正设备的复杂度,提出了一种校正阵列的幅相误差的无源校正算法。
1 信号模型与校正算法1.1 信号模型假设M阵元的阵列,信号来向的方位角和俯仰角分别用φ和θ表示。
考虑阵列存在幅相误差时,阵列的真实导向矢量可表示为其中:a(θ,φ)为信号理想导向矢量;Γ为一个对角阵,表示幅相误差,其具体形式为式中,ρm,φm分别表示第m个阵元的幅度误差和相位误差,一般以第1个阵元为参考阵元,此时ρ1=1,φ1=0。
接收信号模型可表示为其中:s(t)为飞机发射的 ADS-B 信号;n(t)为高斯白噪声;Ns为快拍数。
1.2 ADS-B信号来向的求解上述信号模型中ADS-B信号的来向是未知的,可通过阵列天线的位置和飞机位置计算得到。
以中国民用航空采用的1090ES模式数据链为例,发射的ADS-B信号包括1个报头和1个数据块,帧长度为120 μs。
报头(前导脉冲)为4个脉冲序列,长度为8 μs;信息数据块从第1个发射脉冲8 μs后开始,采用脉冲位置编码(PPM),数据块长度为112 bit,每比特持续时间为1 μs,发射机将来自飞机或地面的监视系统提供的飞机信息(速度、位置、航向、飞机代号、飞机状态信息及24位S模式地址码等)通过ASK调制到1 090 MHz[14-15]。
使用阵列天线接收飞机ADS-B信号,选择其中任一阵元接收的信号先进行报头检测,当检测到4个前导脉冲时即认为检测到ADS-B信号,记录第1个前导脉冲的位置,即ADS-B信号到达天线时的时刻;通过ADS-B软件接收机解调得到此条ADS-B信号所携带的信息;根据解调出的ADS-B信号,选取携带经度、纬度和高度的ADS-B信号,很容易选取没有受到其他ADS-B信号交织干扰的ADS-B信号,即在该条ADS-B信号时间内,只有1条ADS-B信号;最后根据ADS-B信号长度为120 μs,由记录的到达天线的时刻,可截取该条ADS-B所在时间内阵列接收的此条ADS-B信号,作为阵列接收到的数据。
由ADS-B信号解得的飞机经度、纬度和高度,再测量得到阵列天线的经度、纬度和高度,通过将大地坐标转化为站心坐标系[16],把飞机位置和阵列天线位置由经纬高转为以阵列天线所处位置为视觉中心来观测周围物体的相对位置,即可计算出飞机发射的ADS-B信号的来向,包括俯仰角和方位角,如图1所示。
飞机解调ADS-B信号得到纬度latp、经度lonp、高度altp的信息,阵列天线的位置可通过GPS、北斗等设备测得其纬度lata、经度lona、高度alta。
首先将阵列天线和解得的飞机位置由大地坐标系转化为地心地固坐标系。
假设在大地坐标系中的位置为纬度lat、经度lon、高度 alt的坐标(lat,lon,alt),将其转化到地心地固坐标系(x,y,z)的公式如下图1 ADS-B信号俯仰角与方位角Fig.1 Elevation and azimuth of ADS-B signal其中:N为基准椭球体的卯酉圈曲率半径;e2为椭球偏心率,其与基准椭球体的长半径a和短半径b存在如下关系根据上述公式,可分别求出地心地固坐标系下阵列天线的位置(xa,ya,z)a和飞机的位置(xp,yp,zp)。
从阵列天线到飞机的观测向量为将观测向量转化为以阵列天线为原点的站心坐标系中的向量,其变换关系为式中,S为坐标变换矩阵,其具体形式为根据阵列天线与飞机观测向量[Δe,Δn,Δu]T,由此可计算出飞机发射ADS-B信号的来向,其中俯仰角为方位角为1.3 幅相误差的校正根据截取的接收信号的数据,计算协方差矩阵,并进行特征值分解,最大特征值对应的特征向量设为u。
由于接收数据中只包含1条ADS-B信号,因此最大特征值对应的特征向量与阵列真实的导向矢量有如下关系[6]其中:k为复数。
令将表示为则由式(11)~式(14)可得可以解得2 仿真结果与分析2.1 仿真条件ADS-B载波频率为1 090 MHz,其波长约0.275 m,使用阵元数为5阵元的十字阵,中心阵元距其余4个阵元的间距为0.091 m,使周围4个阵元间距离略小于半波长,采样频率设为40 MHz,ADS-B信号长度为120 μs,故每条ADS-B阵列接收后快拍数为4 800。