图像采集通用控制系统的设计与实现
图像处理系统的设计与实现

图像处理系统的设计与实现一、引言随着科学技术的不断进步,图像处理技术得到了广泛的应用,涵盖了领域众多。
比如医学影像、无人驾驶、智能安防等领域都离不开图像处理技术的支持。
图像处理系统是针对图像信息进行处理和分析的系统,其设计与实现的高效与稳定对应用场景的实现至关重要。
本文将探讨图像处理系统的设计与实现,包括系统架构设计、关键功能模块和算法选择等方面。
二、系统架构设计1.需求分析:在设计图像处理系统之前,首先需要明确系统的应用场景和具体需求。
系统要处理的图像类型、处理的精度要求、处理的速度要求等。
根据不同的需求,系统的架构设计也会有所不同。
2.架构设计:在进行系统架构设计时,可以采用分层架构设计的方式。
通常可以分为应用层、处理层和底层三层架构。
应用层负责用户交互与业务逻辑处理,处理层负责图像处理算法的实现,底层负责图像数据的读取与存储。
3.性能考虑:在进行系统架构设计时,需要充分考虑系统的性能要求。
在处理大规模图像数据时,需要考虑系统的并发能力、响应速度等。
三、关键功能模块1.图像采集模块:图像采集模块是系统的基础模块,负责接收外部输入的图像数据。
通常可以与摄像头、扫描仪等设备进行对接。
2.图像预处理模块:图像预处理模块可以对输入图像进行预处理,包括图像去噪、图像增强、图像分割等操作。
预处理能够提高后续处理的效果。
3.特征提取模块:特征提取模块是系统的核心模块,负责从图像中提取出有价值的特征信息。
可以提取出图像的边缘信息、纹理信息等。
4.图像识别模块:图像识别模块是系统的重要功能模块,负责对图像进行识别和分类。
可以采用机器学习、深度学习等技术实现。
5.结果展示模块:结果展示模块负责将处理后的图像结果展示给用户,可以采用图像显示、图像打印等方式。
四、算法选择1.滤波算法:滤波算法是图像预处理中常用的算法,可以移除图像中的噪声、增强图像的信息等。
常用的滤波算法包括均值滤波、中值滤波、高斯滤波等。
2.特征提取算法:特征提取算法是图像识别中的关键算法,可以从图像中提取出有价值的特征信息。
基于深度学习的图像识别系统设计与实现毕业设计成果
《基于深度学习的图像识别系统设计与实现》毕业设计成果
本毕业设计基于深度学习技术,旨在实现一个高精度的图像识别系统。
该系统包括图像数据集的采集、数据预处理、模型训练、模型评估和系统应用等多个模块。
首先,针对不同应用场景,本设计采集了大量的图像数据集,并手工进行了标注和分类。
接着,对采集的图像数据进行预处理,包括图像大小调整、剪裁、旋转、对比度增强、颜色平衡等操作,以便提高模型的泛化能力和鲁棒性。
同时,为了缓解数据不平衡的问题,采用了数据增强技术,如镜像、旋转、平移等。
其次,设计了基于卷积神经网络(CNN)的深度学习模型,并使用Python编程语言和TensorFlow深度学习框架进行了模型训练。
在模型训练中,采用了批量归一化、Dropout、Adam等优化技术,以提高模型的训练速度和精度。
同时,进行了反向传播算法和梯度下降算法的优化,以提高模型的收敛速度。
然后,使用测试数据集对训练好的模型进行评估,并对评估结果进行分析和总结。
评估结果表明,本设计所训练的图像识别模型在多个数据集上均取得了优异的识别效果,分类准确率高达95%以上,明显优于传统的图像识别算法。
最后,将所训练的深度学习模型应用于实际场景中,并开发了一个图像识别系统。
该系统具有良好的用户交互体验和可扩展性,可以适应不同领域的图像识别需求。
总之,本毕业设计基于深度学习技术,通过对图像数据的采集、预处理、模型训练、评估和应用等多个环节的优化,实现了一个高精度、高效率的图像识别系统,具有较高的实用价值和推广前景。
基于Linux平台的图像采集系统的设计与实现

系统 ,而 Ln x系统作为一个开放 的操作 系统具有 独立性 、 iu
创新性 、可扩展性 等优点 ,适合 开发 独立 的具有创 新性 的
图像采集系统_ ,但 由于 Ln x系统是源码开放 ,没有 一 7 。 iu
-
7作模 型并且设计 实现 了系统 的硬件平 台和软件平 台,实验 结果表 明,该 系统可 以安全 可靠的控制全 方位 转动的摄像机 对 - -
环境信 息进行 高清晰 图像采集 ,有效的提 高了图像采集速 度和准确 性。
关 键 词 :Ln x 台 ; 图像 采 集 ;视 频 处 理 ;模 块 化 ;可扩 展 性 iu 平 中 图法 分 类 号 : 3 2 1 TP 0 . 文献 标 识 号 :A 文章 编 号 :10 —0 4 (0 2 62 3 —4 0 07 2 2 1 )0 —3 40
后来 随着计算机 技术 的发展 ,采 集卡作 为 图像 采集 系统不 可缺少 的硬件逐 渐被应 用在 图像采集 系统 中 ,利用 图像采 集 卡可以轻松 的将模 拟摄像 机 的图像信 号采集 进来 进行处
理 ,采集卡 的软件界 面也很轻松 的应用 在图像采集 系统 中, 所以利用采 集卡 和模 拟摄像 机可 轻松 的完成 图像采 集 系统 的设计 ,模 拟摄 像机 的 图像 采集技 术成熟 易实 现 ,但 图像 采集的速度慢 、抗干扰 能力 差 ,由于 噪声多 造成采 集 的图 像不清晰 ,操作 不方便 ,由于这 些缺 点这种技 术 已渐渐 的
在早期的 图像采集 系统 的研究 中,由于 硬件大 多采 用 的是装有 C MOS芯片的摄像机 ,由于 C S芯 片只能采集 MO 模拟信号 ,所 以要使 用模Байду номын сангаас摄 像机 进行 图像采 集系统 的研 究 ,还需要额 外 的对模 拟 信号 进行 处 理 以得 到 数 字信 号 。
图像采集系统的制作方法
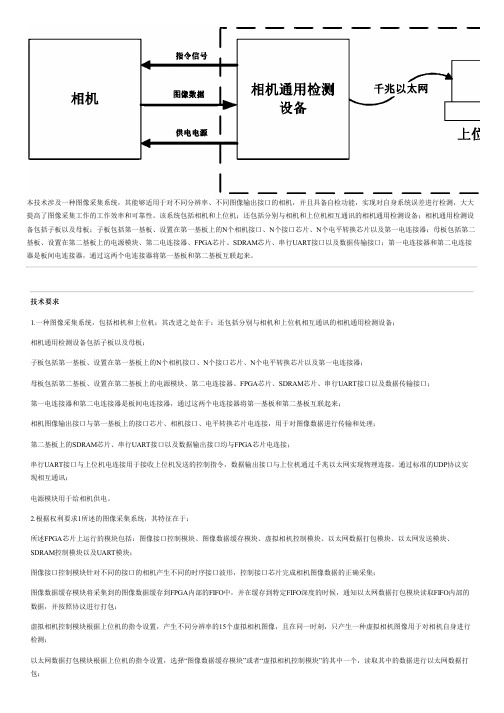
本技术涉及一种图像采集系统,其能够适用于对不同分辨率、不同图像输出接口的相机,并且具备自检功能,实现对自身系统误差进行检测,大大提高了图像采集工作的工作效率和可靠性。
该系统包括相机和上位机;还包括分别与相机和上位机相互通讯的相机通用检测设备;相机通用检测设备包括子板以及母板;子板包括第一基板、设置在第一基板上的N个相机接口、N个接口芯片、N个电平转换芯片以及第一电连接器;母板包括第二基板、设置在第二基板上的电源模块、第二电连接器、FPGA芯片、SDRAM芯片、串行UART接口以及数据传输接口;第一电连接器和第二电连接器是板间电连接器,通过这两个电连接器将第一基板和第二基板互联起来。
技术要求1.一种图像采集系统,包括相机和上位机;其改进之处在于:还包括分别与相机和上位机相互通讯的相机通用检测设备;相机通用检测设备包括子板以及母板;子板包括第一基板、设置在第一基板上的N个相机接口、N个接口芯片、N个电平转换芯片以及第一电连接器;母板包括第二基板、设置在第二基板上的电源模块、第二电连接器、FPGA芯片、SDRAM芯片、串行UART接口以及数据传输接口;第一电连接器和第二电连接器是板间电连接器,通过这两个电连接器将第一基板和第二基板互联起来;相机图像输出接口与第一基板上的接口芯片、相机接口、电平转换芯片电连接,用于对图像数据进行传输和处理;第二基板上的SDRAM芯片、串行UART接口以及数据输出接口均与FPGA芯片电连接;串行UART接口与上位机电连接用于接收上位机发送的控制指令,数据输出接口与上位机通过千兆以太网实现物理连接,通过标准的UDP协议实现相互通讯;电源模块用于给相机供电。
2.根据权利要求1所述的图像采集系统,其特征在于:所述FPGA芯片上运行的模块包括:图像接口控制模块、图像数据缓存模块、虚拟相机控制模块、以太网数据打包模块、以太网发送模块、SDRAM控制模块以及UART模块;图像接口控制模块针对不同的接口的相机产生不同的时序接口波形,控制接口芯片完成相机图像数据的正确采集;图像数据缓存模块将采集到的图像数据缓存到FPGA内部的FIFO中,并在缓存到特定FIFO深度的时候,通知以太网数据打包模块读取FIFO内部的数据,并按照协议进行打包;虚拟相机控制模块根据上位机的指令设置,产生不同分辨率的15个虚拟相机图像,且在同一时刻,只产生一种虚拟相机图像用于对相机自身进行检测;以太网数据打包模块根据上位机的指令设置,选择“图像数据缓存模块”或者“虚拟相机控制模块”的其中一个,读取其中的数据进行以太网数据打包;以太网发送模块依据千兆以太网接口的RGMII接口时序,将打包后的数据,通过RGMII接口发送出去;SDRAM控制模块在FPGA内部的FIFO有限的情况下,将部分要缓存的数据缓存到SDRAM芯片中;UART模块用于实现与上位机或者其他UART接口之间的数据通讯,实时回报相机通用检测设备的工作状态。
静态图像信息采集系统设计与实现
人 工 智 能 及 识 别 技 术
Ke r s a r I g pu e Dep i AP ; l pn y wo d :C mea; ma eCa trd; lh ; i ci ig p
l 引言
在工作生活中经常要用到 Q Q等聊 天工具 ,这 些聊 天工具
寸 ) 的图 片 。
()实现图片保存 ,设计 的抓图窗 口如图 1 3 所示 。
下 该 时刻 对 方 的 形 象 。
其实 ,摄像头 作为一个 影像捕 捉工具 ,也经 常应用在 数 据库系统 的照片采集工作中。D lh是数据库开发的利器 ,利 ep i 用它进行数据 库应用系 统前端开发 ,效率相 当高 。那么 ,在 Dl i e h 中如何实现摄像头静 态图像抓取 、裁剪 和保存 功能呢 ? p
文中将提供一个完整的解 决方 案。
2 实现
21 硬 件 .
计算机、摄像头 。
22 软 件 .
图 1
2 . 打开摄像头 .1 3
摄像 头驱动 程序 、后 台数 据库 ( 比如 S LSre2 0 ) Q e r00 、 v 前端开发工具 D lh。 ep i
23 实 施 步 骤 .
Ab t a t s r c :Ca r s u e o c p u e i g s o h o l.D l h s c mmo l s d a h e eo me tt li r n ft e me a i s d t a t r ma e ft e t os e p ii o n y u e s t e d v lp n o n fo to h
电脑编程技巧与维护
静态 图像信息采集 系统 设计与实现
姚 文声
( 济南铁路高级技工学校 ,济南 2 0 ) 5 17 1
CCD图像采集解决方案
CCD图像采集解决方案引言概述:CCD(Charge-Coupled Device)是一种常用于图像采集的传感器,广泛应用于数字相机、显微镜、天文望远镜等领域。
CCD图像采集解决方案是指利用CCD传感器进行图像采集时所采取的一系列方法和技术。
本文将介绍CCD图像采集解决方案的相关内容。
一、硬件选型:1.1 选择合适的CCD传感器:根据应用需求确定CCD传感器的分辨率、灵敏度、动态范围等参数。
1.2 选择适配的镜头:根据CCD传感器的尺寸和像素密度选择合适的镜头,确保图像质量。
1.3 选择适配的光源:根据拍摄环境和拍摄对象选择合适的光源,确保图像亮度和对比度。
二、图像采集系统设计:2.1 确定图像采集系统的整体架构:包括CCD传感器、镜头、光源、图像采集卡等组件的连接和布局。
2.2 设计图像采集系统的电路:根据CCD传感器的工作原理和信号特点设计合适的模拟信号处理电路和数字信号处理电路。
2.3 设计图像采集系统的机械结构:确保CCD传感器和镜头的稳定性和精确对焦,减少振动和模糊。
三、图像采集参数设置:3.1 设置曝光时间:根据拍摄对象的亮度和运动速度确定合适的曝光时间,避免过曝或欠曝。
3.2 设置增益和增益平衡:根据拍摄对象的细节和对比度调节增益和增益平衡,优化图像质量。
3.3 设置白平衡和色彩校正:根据拍摄环境的光源颜色和色温调节白平衡和色彩校正,保持图像色彩真实。
四、图像采集软件开发:4.1 设计图像采集界面:根据用户需求设计直观友好的图像采集界面,提供参数设置和图像预览功能。
4.2 编写图像采集控制程序:利用图像处理库和相机驱动程序编写图像采集控制程序,实现图像采集和保存功能。
4.3 优化图像处理算法:根据应用需求对图像处理算法进行优化,提高图像处理速度和效果。
五、图像采集系统调试和优化:5.1 调试硬件连接:检查CCD传感器、镜头、光源等组件的连接是否正确,确保信号传输畅通。
5.2 调试图像采集参数:根据实际拍摄效果调整曝光时间、增益、白平衡等参数,优化图像质量。
高速图像采集系统的设计与实现

a lc t nsi r po e sd n pp iai ,s p o s d ba e o ARM r e s r n e b dd d n x y tm shih-p e i e m a e a q iiin y t m o p oc s o s a d m e e Li u s se , g s e d v d o i g c u sto s se h r wa e ac ie t r nd s fwa ed sg olto ,n v st y outo o t e p o e Ex e i e t lr s lss o t a he a d r r ht cu e a o t r e i n s u insa d gie heke s l i n t h r blm. p rm n a e u t h w tt h
a plc t n r q ie e s p i ai e ur m nt. o
Ke w o d : y r s CCD; PGA ; a ea q iiin; F I g c u sto Embe d dln x m d e iu
硬件 电路 设 计 本 设计 的硬件系 统 由嵌 入式 AM处理器 、 C R CD图像传 感器 、 / AD 转 换器 、FG PA电路 、JE PG编码器等 组成 ,其 中, C C D图像 传感器 将 光 信号转 换为 模拟 电子信号 ,传送给 AD转换器 ,AD转换器将 模 / / 拟 电子信 号转换 为 By r数字信 号 ,传送 给 FG ,F G ae PA P A将 By r a e 数 字信号 转换 为 Y V 号 , U信 传送 给 3 E 编码 器 , 由 AM控制 J E PG 再 R PG 编 码器生 成 J E P G图像 ,通过 网络传送 给 P C机保存 或显示 。 对 各 部分 电路 的详 细介 绍 如下 : ( )C D 控 制 电路 。C D 控 制 电路 采 用 索尼 公 司 生产 的 一 C C IX0 ,其主 要作 用是 将像 素 的光信 号转 换 为 电信 号 C25 IX0 是 ~款 12英 寸、有 效 像素 为 15 的 cD传感 器 , C25 / 4万 c 每 秒 可 输 出 图 像 7 5 帧 。 其 关 键 参 数 如 下 : 水 平 驱 动 频 率 . 1. 1M z 4 3 8H ,感光 区尺 寸 0 5英寸 ,有 效 像素 19 .0 0 . 32 14 ,可 满足 大 多数 应用 的 需求 。 ( ) / 转 换电路 。 / 转换 电路 的主 要功能是 将 CD - AD AD C 传感 器 输 出的模拟信 号转换 为数字信号 。本设计选用 Aa o e ie公司 n lgDv c 生产 的 A 92A作为 AD 换电路 , D93 /转 它具 有 1 位 3M z / 转换器 , 2 6H D A 内含 6 4 d 可变增 益放大器 ,是针对 数字 图像采 集设备 的前端设 -2B 备 。AM微 处理器 通过 串行接 口控制 AD转换 电路将 C D电路输 出 R / C 的模 拟信号转 换为数字 B yr 号,并将其输 送到 FG ae 信 PA电路 。 ( )F G 控 制 电路 。F G 三 PA PA控制 电路 的主 要功 能是 将 B yr ae 信 号转 换 为 RB信 号 再将 RB 号 转换 生成 YV视频 信 号 。 G G信 U ( ) P G 码 电路 。 P G 码 电路 的主 要功 能是 对输 入 的 四 JE 编 JE 编 Yv视频 信 号进 行编 码 , U 生成 常用 的 J E P G图像本 设计 选用 的 JE PG 编 码 芯 片 是 T yo lcr n e ie L m td 公 司 生 产 的 ok Ee to Dv c i ie T 3 1RF E 30 P (以 下 简 称 T 3 1)芯 片 。 T 3 1 是 基 于 E 30 E3 0 I O IC0 1— C eu n il 方式 的 3 E 编码 芯 片 ,可对 S/ E 198 1D T sq et a PG 6 04 0V A4 :2 的 图像进 行最 大 15p 4x 8 (G/ :2 ) 3 fs的高速 压缩 。 ( )A 控制 电路 。 R 整 个系 统 的中心控 制 部件 ,负 责 五 M R AM是 控 制 C D电路 的输 出 、/ 换 电路 的输 入 输 出, 制 F G U AD转 控 P A将 Y V U 信 号输 送 给 J E P G编码 芯片 , 并将 JE PG编码 芯 片输 出 的 JE PG图像 数 据通 过 网络 传送 给 P 机达 到 显示和 保 存 的 目的 。本 设计 选 用 c
基于EZ-USB FX2的CMOS图像采集系统设计与实现

第28卷第4期增刊2007年4月仪器仪表学报Chinese Journal of Scientif ic Instr umentVol128No14Apr12007基于EZ2U SB FX2的CMOS图像采集系统设计与实现孟 浩,付继华,王中宇(北京航空航天大学仪器科学与光电工程学院 北京 100083)摘 要:本文介绍了一种由USB控制器EZ2US B FX2和CMOS图像传感器OV9620构成的图像采集系统,给出了系统的工作原理,以及软、硬件的设计和实现方法。
系统采用全数字模式进行图像传输,克服了模拟信号在传输过程中失真的缺陷。
另外,高分辨率CMOS图像传感器和高速USB2.0接口保证了图像采集系统具有高分辨率和高帧频率。
关键词:图像采集;EZ2USB FX2;CMOS图像传感器;设备端固件Design and Implementatio n of CMOS image acquisition systembased on EZ2U SB FX2Meng Hao,Fu Jihua,W ang Zhongyu(School of I n strum ent Science and Opto2electronics E ngin eering,Beijing university ofAer o nautics a nd Astrona utics,Beijing100083,China)A bstract:An image acqui sition system composed of US B2.0controller EZ2USB FX2and CMOS image sensor OV9620 is presented.The systemπs working principle,and it s ci rcuit and programming met hod are al so descri bed.In this sys2 tem,all2digital transmission mode i s used to overcome t he transmission distortion of analog signal.The system pos2 sesses t he advant ages of high resolution and high frame rate,which is due to t he usage of t he high2resol ution CMOS image sensor and t he high2speed US B2.0interface.K ey w ords:i mage acquisition;EZ2USB FX2;CMOS image sensor;device firmware1 引 言CMOS图像传感器与CCD图像传感器相比,具有功耗低、集成度高、体积小和抗干扰能力强等优点,因此在图像传感、天文观测、星敏感器等领域得到了广泛的应用[1]。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
图像采集通用控制系统的设计与实现张超,古乐野,徐晓,乔忠慧(中国科学院成都计算机应用研究所,四川 成都610041)摘要:本文介绍了一种基于ARM的实时图像采集通用控制系统的设计与实现。
在设计中主要采用了LPC2132微控制器芯片和四相步进电机正弦波驱动器STK672—080芯片。
文中主要介绍了该控制系统的工作原理、系统组成、硬件设计以及软件设计中的关键问题。
关键词:ARM;图像采集;人机交互;步进电机中图分类号:TP368.1文献标志码:BDesign and Implementation of Universal Control System inImage CollectionZHANG Chao, GU Le-ye, XU Xiao, QIAO Zhong-hui(Chengdu Institute of Computer Application, Chinese Academy of Sciences, Chengdu, Sichuan610041, China)Abstract:This paper introduced the design and implementation of real-time image collection’s control system based on ARM. LPC2132 microcontroller and the sine wave stepping motor driver were adopted in the system. This paper also described the construct of the system, design of hardware, several critical techniques in the development of software of the control system.Key words: ARM; image collection; human-computer interaction; stepping motor0 引言OCR(Optical Character Recognition)阅读机是以实时图像采集和图像处理为核心技术的, 主要由送纸机构、扫描主体和接纸机构三部分组成。
送纸机构主要功能是搓动纸张,并将纸张传送到扫描主体中;扫描主体的主要功能是采集图像,并将纸张传送到接纸机构中;接纸机构主要功能是装载已经扫描过的纸张。
在OCR阅读机中,控制系统的性能直接决定图像采集的速度。
本文介绍了一种基于ARM的图像采集通用控制系统的设计方案,这种方案比较稳定、可靠,还大大提高了图像采集的速度。
1 系统结构设计和工作原理图1 OCR阅读机的控制系统部分组成框图本控制系统主要有ARM主控模块、电源模块、信号检测模块、电机驱动模块和显示驱动及按键模块五个部分;ARM控制模块是主控模块;电源模块提供系统中各芯片所需的电压;电机驱动模块主要负责控制步进电机;显示驱动及按键模块用来输出与用户进行交互的提示信息,并识别用户的按键信息。
图1是OCR阅读机的控制系统部分的结构组成。
在OCR阅读机的控制系统中有两个步进电机:送纸电机和走纸电机。
送纸电机用于在送纸机构处搓动纸张,把纸张传送到扫描通道中;走纸电机用于把扫描通道中的纸张传送到接纸机构中。
以ARM为核心的控制系统是OCR阅读机的控制系统部分,主要功能是利用信号采集模块采集的纸张有无信号以及用户提供的按键信息对步进电机进行准确控制,同时在显示驱动模块输出已经扫描的纸张数目以及扫描故障等信息,以方便与用户进行交互。
2 主要芯片介绍在图像采集控制系统中用到的芯片主要有ARM微控制器芯片、步进电机驱动器。
ARM 芯片选用的是Philips公司的LPC2132微控制器芯片;嵌入式运动控制技术广泛采用ARM 微控制器芯片,它包含了多个学科,它覆盖了嵌入式技术、计算机技术、智能控制技术、检测技术和运动控制技术等诸多方面【1】。
步进电机驱动器选用的是SANYO公司的四相步进电机正弦波驱动器STK672—080。
2.1 LPC2132CPU简介LPC2132CPU是Philips公司推出的基于ARM7TDMI-S核的精简指令系统的32位高速处理器,具有高集成度和高性价比,很适合于嵌入式系统设计【2】。
它的工作电压为 3.3V,大大降低了功耗,内核ARM7TDMI-S的工作电压仅为 2.5V。
较小的封装和极低的功耗使LPC2132CPU可以理想地用于小型系统中,如访问控制、POS机、通信网关、协议转换器、嵌入式软modem、声音辨别和低端成像、以及工业控制和医疗系统中【3】。
LPC2132CPU本身的特点很好的满足了本系统的需要。
2.2 STK672-080简介STK672-080是SANYO公司生产的一种步进电动机驱动器厚膜混合集成电路,它的输出级使用功率MOSFET组成,同时包含一个内部的微步距控制器和一个单极性的恒流PWM系统【4】。
STK672-080内部提供的4相步进电动机分配控制器可获得准正弦波驱动电流,从而使用户应用更简单方便。
它有五种激励(通电)方式,可提供微步距控制以使步进电动机的基本步距角的最大细分为1/16。
STK672-080步进电机控制器的速度由时钟信号控制。
通过它可使用户方便地实现高转、低振动水平、低噪音、快速响应和高效驱动的电动机控制系统。
STK672-080的典型应用包括传真机发送与接收步进电机驱动、复印机送纸、光学系统步进电机驱动、激光打印机鼓驱动、打印机台架步进电机驱动、X—Y绘图仪笔驱动、工业机械手以及其他步进电机的应用方面【4】。
3 硬件设计3.1 电源模块本控制系统采用单一电源供电,外接220V转19V的电源适配器,以ARM为核心的控制模块和显示驱动及按键模块需3.3V供电,步进电机需19V供电,同时OCR阅读机的图像采集部分需要5V供电,因而电源模块内部先采用LM2596S—ADJ开关电压调节器输出5V,然后再采用KIA117固定输出3.3V的LDO稳压器输出3.3V,这样就可以得到整个系统都需要的电压。
用户在设计时可以参阅相关公司发布的芯片文档。
3.2 显示驱动及按键模块显示驱动及按键模块的主要功能是提供一个人机交互界面,方便与用户进行交互;同时,用户还可以通过按键选择相应的控制功能。
在本系统中,显示驱动模块采用的是3个8段共阳极数码管,通过驱动3个共阳极数码管向用户显示扫描纸张的计数信息、系统菜单信息和扫描故障等信息,同时向用户提供两个按键。
在实际系统中,如果用户想显示字符,可以自己进行数码管的驱动设置。
3.3 信号采集模块在OCR阅读机中,图像采集控制系统的信号采用模块主要采用红外对管采集信号,在送纸机构处有一对红外对管用于检测纸张的有无,在扫描主体中有两对红外对管用于检测扫描主体通道中的纸张有无。
在信号采集模块中要做AD转换,在LPC2132芯片中有1个10位8路AD转换器。
根据信号采集模块采集的信号,系统用逻辑状态1表示有纸,用逻辑状态0表示无纸。
因而,我们可以确定整个系统有四种逻辑状态:如下表所示:送纸机构扫描通道含义送纸机构有纸,扫描主体无纸1 0送纸机构和扫描主体都有纸1 1送纸机构没有纸,扫描主体有纸0 1送纸机构和扫描主体都没有纸0 0表1 OCR阅读机的逻辑状态3.4 步进电机驱动模块图2 电机驱动部分原理图步进电机驱动模块主要是用来驱动步进电机,步进电机也叫步进器,它是利用电磁学原理将电能转化成机械能,将电脉冲信号转化成角位移或者线位移的开环控制元件。
在非超载的情况下,电机的转速、停止位置只取决于脉冲信号的频率和脉冲数,而不受负载变化的影响,即给电机加上一个脉冲信号,电机则转过一个步距角。
在本控制系统中采用的是两个步距角为0.9度的混合式步进电机,型号为江苏常州合泰电机有限公司生产的57BYG206-06。
步进电机在使用的时候都要配备特定的驱动电路,用户可以自己设计步进电机的驱动电路,也可以选用其他公司已经设计成型的步进电机驱动器。
在本系统中采用四相步进电机正弦波驱动器STK672-080,STK672-080步进电机控制器的速度由时钟信号控制。
在本系统中有送纸电机(主电机)和走纸电机(从电机)两个步进电机,为了提高系统的稳定性,系统采用了两个STK672-080驱动器,分别用于控制这两个步进电机,这样有利于提高系统的稳定性和可靠性。
步进电机驱动部分的原理图如图2所示。
3.5基于ARM的主控模块基于ARM的主控模块是本控制系统的核心部分,控制系统的所有功能都是通过该模块来完成的。
ARM主控模块与其他辅助模块一起完成整个控制系统的功能,系统中用到了ARM的ISP功能,这样可以方便实现系统的软件升级。
4 软件设计软件设计是本控制系统的另一个重要部分。
在ARM控制系统中实现的主要有4个控制功能:通用扫描功能、纸张计数功能、纸张计数设定功能和纸张厚度自校功能。
通用扫描功能是在启动机器后开始扫描,直到送纸机构中的所有纸张扫描完毕或者在扫描过程中出现重张或者纸张过长等故障时会提示故障信息时停止;纸张计数功能是预先设定一个要扫描的纸张数,在启动机器后开始扫描,在扫描计数达到预先设定的纸张计数值后暂停;纸张计数设定功能是用来根据实际需要设定纸张计数值,最大值为999。
这个功能是与纸张计数功能配合使用的,在纸张计数设定完成后,会转到纸张计数功能;纸张厚度自校功能的目的是自行检测纸张厚度,以使系统更加安全可靠地运行,方便用户使用。
在实现以上4个功能的时候,有几个关键部分如下:4.1 中断处理程序在控制程序中,用到了一个定时器1(Timer1)的中断处理程序,在中断处理程序中完成了按键识别和上位机下发命令的识别、重张的检测、纸张过长检测、纸张的扫描计数和扫描纸张厚度的实时检测等重要功能。
这些功能的实时性要求很高,因而放在定时器的中断处理程序中实现。
4.2 显示驱动及按键识别在ARM控制程序中设计了两个函数用于LED的驱动显示,分别为displayLED()和displayFun()。
displayLED()用于驱动三个数码管分别各自显示控制系统中要用到的全部字符;displayFun()中用来实现系统中功能菜单、扫描故障信息和数据的显示。
显示驱动及按键模块还提供了一个与用户进行交互的两个按键。
在识别按键的时候要做按键的去抖动处理,本系统中按键的去抖动是通过软件实现的。
所采用的软件去抖动方法是在检测出按键闭合后执行一个延时程序(大约10—20ms),待前沿抖动消失后再检测按键的状态,如果按键仍保持闭合状态则确认为真正有按键按下;当检测到按键释放时,也要执行一个延时程序,避开按键的后沿抖动。