六旋翼无人机系统
六旋翼飞行器飞行原理

六旋翼飞行器飞行原理
六旋翼飞行器是一种具有六个旋翼的无人机,它通过旋转六个螺旋桨产生的升力来实现飞行。
这种飞行器的飞行原理可以简单地归纳为"旋翼产生升力,控制旋翼转速来实现飞行方向的调整"。
六旋翼飞行器中的每个旋翼都通过电动机驱动,使其快速旋转。
旋翼的旋转产生了气流,这种气流对着旋翼产生的螺旋桨叶片施加了一个向上的力,也就是升力。
通过控制旋翼的转速,可以控制升力的大小,从而实现飞行器的升降。
六旋翼飞行器通过调整旋翼的旋转速度来实现飞行方向的调整。
当飞行器需要向前飞行时,它会增加前方的旋翼转速,使得飞行器倾斜向前,而向后飞行则相反。
通过控制旋翼转速的差异,可以实现飞行器的转向、左右平移等操作。
六旋翼飞行器还配备了多个传感器和控制系统,以保证飞行器的稳定性和安全性。
例如,陀螺仪可以感知飞行器的姿态,从而调整旋翼转速来保持平衡;加速度计可以感知飞行器的加速度,从而调整旋翼转速来保持稳定。
这些传感器和控制系统的配合使得飞行器能够在空中保持平稳飞行。
六旋翼飞行器的飞行原理是依靠旋翼产生的升力和控制旋翼转速来实现飞行方向的调整。
通过精确控制旋翼的转速和调整飞行器的姿态,六旋翼飞行器能够实现高度灵活的飞行,并广泛应用于航拍、
搜救等领域。
六旋翼无人机飞行原理

六旋翼无人机飞行原理
六旋翼无人机是一种采用六个电动马达和旋翼组成的飞行器。
六旋翼无人机的飞行原理是通过电动马达带动旋翼高速旋转,产生上推力,从而使无人机升空并实现平稳飞行。
六旋翼无人机采用的是旋翼的飞行方式。
旋翼是一种产生升力的设备,它的旋转使空气产生向下的压力,从而使飞机升空。
六旋翼无人机采用的是六个旋翼,比四旋翼多两个旋翼,能够更好地保持平衡,并具有更好的机动性能和稳定性能。
六旋翼无人机采用的是电动马达产生动力。
电动马达是通过电能转化成机械能,带动旋翼旋转产生上推力。
六旋翼无人机的电动马达需要具有高功率和高效率,能够产生足够的推力以支持无人机的飞行。
六旋翼无人机还采用了先进的控制系统。
控制系统可以通过无线电通讯,实现对无人机的遥控和自主控制。
遥控器可以通过无线电信号,控制无人机的上下、前后、左右和旋转方向。
自主控制则是通过内置的传感器和计算机,实现对无人机的自主飞行和导航。
六旋翼无人机还具有良好的稳定性能。
六旋翼无人机采用的是六个旋翼,比四旋翼多两个旋翼,能够更好地保持平衡,并具有更好的机动性能和稳定性能。
此外,六旋翼无人机还采用了先进的控制系统,能够实现对无人机的精确控制和稳定飞行。
六旋翼无人机的飞行原理是通过电动马达带动旋翼高速旋转,产生上推力,从而使无人机升空并实现平稳飞行。
它采用了先进的控制系统,能够实现对无人机的遥控和自主控制,并具有良好的稳定性能。
未来,六旋翼无人机将会被广泛应用于物流配送、农业植保、环境监测和消防救援等领域,成为未来无人机市场的重要组成部分。
六旋翼无人机飞行控制系统设计

六旋翼无人机飞行控制系统设计
旋翼机以其灵活的机动性,低廉的成本,简单可靠的机械结构、出色的悬停特性在商业和军事领域发挥着重要作用。
未来,旋翼机将在快递、测绘、抢险救灾、公安、消防以及农业领域扮演越来越重要的角色,与此同时对旋翼机的稳定性和可靠性也提出更高的要求。
相比四旋翼,六旋翼在保证可靠性的同时能提供更好的鲁棒性,甚至可以在单个电机停机的情况下实现稳定降落。
六旋翼无人机本质上是一个不稳定的系统,因此六旋翼无人机上搭载的飞控系统的性能,很大程度决定着六旋翼无人机的稳定性。
本文针对六旋翼无人机,设计了一款飞控系统,实现了六旋翼无人机的稳定飞行。
主要做了以下几个方面的工作:首先针对六旋翼无人机进行数学建模。
根据叶素理论,对六旋翼无人机所用的定矩螺旋桨进行建模。
介绍六旋翼无人机所用的电机类型及工作原理,并对电机进行建模。
之后结合螺旋桨模型以及电机模型,对六旋翼无人机系统进行整体建模,搭建仿真模型,并在后文中进行了仿真和实验验证。
然后,在上述基础上设计了飞行控制器的底层硬件电路系统,利用MEMS传感器采集飞机的各个状态信息,根据各个传感器的特性进行数据融合,从而计算出旋翼机的各个状态。
根据旋翼机结构以及计算出的旋翼机状态,给出PID控制律,算出修正量,发送给电机进行动力修正,从而实现飞行器的稳定飞行。
最后,在硬件环境中实现上述内容,进行实验验证内外环PID参数对六旋翼飞行器稳定性的影响。
分别针对俯仰通道,偏航通道,横滚通道进行测试实验以及飞行实验,试验结果显示六旋翼飞行器表现出了很好的稳定性和可靠性。
无人机六旋翼设计

摘要六旋翼无人机是一种具有可垂直起降能力的小型无人飞行器,它通过上下共轴放置的三组共六个电机提供升力,通过改变旋翼转速来调整姿态,通过调整姿态进一步实现位置控制,具有悬停性能优异、移动灵活、机械结构紧凑、零部件可靠性高等优点。
论文首先对六旋翼无人飞行器的调姿原理进行了介绍,分析了其飞行姿态的调整方式。
并建立了六旋翼无人机的数学模型,根据实际情况对其数学模型进行了必要的简化。
接着,论文完成了对于六旋翼无人机控制系统硬件平台的组建,组建了高精度的传感器系统,并完成了飞行控制器硬件的设计与实现,完成了硬件调试工作以及驱动的编写工作。
然后,论文建立了六旋翼无人机的完整控制系统,其中包含位置控制部分、高度控制部分以及姿态控制部分,建立了一套完整的对姿态传感器进行机械防震与数字滤波的方法;提出了一种新颖的气压计、超声波传感器和加速度计的融合方法,通过实验验证了滤波效果;提出了一种优化的拉力分配方法使得控制系统的可靠性得到增强。
接着,论文设计实现了飞行控制软件的主要功能,从技术层面上对于实时性与可靠性进行了大幅的提升。
最后,论文通过悬停试验验证了姿态控制器的控制精度;通过抗干扰能力试验验证了姿态控制器的稳定性;通过信号跟踪试验验证了姿态控制器的跟踪性能;通过高度控制实验验证了高度控制器的控制性能;通过视频跟踪实验验证了六旋翼无人机整体控制架构的合理性与有效性。
关键词:六旋翼无人机;PID;多环路控制;数据融合VI哈尔滨工业大学本科毕业设计(论文)AbstractHex-rotor is one kind of small unmanned aerial vehicles (SUAV) which have theability of vertical take-off and landing (VTOL). It gets thrust by controlling six rotorswith propellers which are divided into 3 groups of coax ial rotors. Its attitude is controlledby regulating the spinning speed of the rotors which in turn makes its positioncontrollable .The hex-rotor has multiple advantages such as the ability of vertical take-off and landing, good mobility and high reliability. Therefore, thehex-rotor has broadapplication prospects and enormous value of research.Firstly, the flying principle was divided into four main modes of motion and analyzedseparately. The dynamic model of the hex-rotor SUAV was deduced with some necessarysimplifications.Then, the control system hardware was built using high-precision sensors.The workof debugging the hardware and programming th e drivers was also done.In the following, the main control scheme was proposed which composed of threemain controllers: position controller, height controller and attitude controller. A completesolution to reduce the noise in the g yroscope and accelerometer caused by vibration wasproposed including mechanical anti-vibration method and a digital filter called alpha-betafilter. A new method of fusing the data f rom ultrasonic sensor, barometer andaccelerometer was prop osed in the paper. Experiment was conducted to prove theeffectiveness of the fusion method. An optimized thrust distribution method was alsointroduced to maintain the robustness of the system. Some technology was alsointroduced to keep the real-time performance and reliability of the control software.Finally, some flight experiments were introduced to prove theperformance of thecontroller: hovering test for the controller accuracy,anti-interference for controllerstability, signal-tracking experiment for controller tracking capability and vision-basedtarget tracking for the overall system performance.Keywords: Hex-rotor, PID, Multi-loop, Data-fusion哈尔滨工业大学本科毕业设计(论文)目录摘要 (VI)Abstract (VII)第1章绪论 (1)1.1 论文研究的目的与意义 ...................................................................... .. (1)1.2 国内外研究现状 ...................................................................... .. (2)1.2.1 四旋翼无人机的研究现状 .................................................................... (3)1.2.2 六旋翼无人机的研究现状 .................................................................... (4)1.2.3 六旋翼控制理论研究现状 .................................................................... (6)1.3 本文主要研究内容 ...................................................................... . (6)第2章六旋翼无人机数学模型的建立 (8)2.1 六旋翼无人机飞行机理分析 ...................................................................... (8)2.1.1 坐标系定义 .................................................................... (8)2.1.2 四种基本运动 .................................................................... (9)2.2 六旋翼无人机机体结构设计 ...................................................................... . (10)2.2.1 机架选型 .................................................................... (10)2.2.2 动力系统设计 .................................................................... (11)2.3 运动方程的推导 ...................................................................... (11)2.4 本章小结 ...................................................................... (16)第3章六旋翼无人机硬件设计 (17)3.1 总体方案 ...................................................................... (17)3.1.1 无线通讯链路 .................................................................... .. (17)3.1.2 传感器系统 .................................................................... (18)3.1.3 执行器与数据保存 .................................................................... (18)3.2 传感器系统 ...................................................................... .. (19)3.2.1 姿态传感器 .................................................................... (19)3.2.2 高度传感器 .................................................................... (19)3.2.3 位置传感器 .................................................................... (20)3.3 飞行控制硬件设计 ...................................................................... .. (20)3.3.1 主控制器选型 .................................................................... .. (20)3.3.2 电源、通讯接口设计 .................................................................... .. (21)3.3.3 数据存储设计 .................................................................... .. (21)VIII3.4 第 4 章4.1 4.2 哈尔滨工业大学本科毕业设计(论文)本章小结 (22)六旋翼无人机控制算法设计.................................. 23 总体控制结构 ................................................................. (23)姿态控制 ................................................................. (24)4.2.1 4.2.2 4.2.3 姿态传感器的减震与滤波 (24)姿态控制器结构 ............................................................. (28)转速分配策略 ............................................................. (28)4.3 高度控制 ................................................................. (31)4.3.1 4.3.2 4.3.3 超声传感器的滤波 (31)高度传感器与加速度计的融合算法 (34)高度控制器结构 ............................................................. (37)4.4 4.5 第 5 章5.1 位置控制 (37)本章小结 ................................................................. (38)六旋翼无人机飞控软件设计与飞行试验........................ 39 飞控软件设计 ................................................................. (39)5.1.1 5.1.2 5.1.3 飞控软件功能设计 (39)飞控软件总体架构 ............................................................. (40)实时性与可靠性设计 ............................................................. (40)5.2 飞行试验 ................................................................. (41)5.2.1 5.2.2 5.2.3 5.2.4 5.2.5 悬停测试 (42)抗干扰能力测试 (43)信号跟踪实验 ............................................................. (43)高度控制实验 ............................................................. (44)视觉跟踪实验 ............................................................. (45)5.3 本章小结 ................................................................. (45)结 论.......................................................... 47 参考文献.......................................................... 48 哈尔滨工业大学本科毕业设计(论文)原创性声明 ....................... 51 致 谢.......................................................... 52 附 录 (53)IX第1章 绪 论1.1 论文研究的目的与意义近年来,在民用领域,无人机技术在救灾、航拍、农业、侦查等各个领域内取 得了广泛的关注与研究。
小型无人机容错控制系统设计
小型无人机容错控制系统设计
多旋翼小型无人机,越来越多的使用在工业级和消费级的领域,
随着世界各国对民用航空低空的开放,对低空航空器的限制日益严格,对其安全性要求也日益提高。
此类小型无人机安全性主要包括两个方面:一方面是严格管理操作人员,提高其操作能力来保证无人机工作
时的安全性;另一方面是采用性能稳定的控制系统,对控制系统进行
容错设计和其他安全性设计来保证无人机系统的可靠性和安全性。
本文针对小型六旋翼无人机的控制系统进行了容错设计来提高其控制
系统的可靠性和安全性。
主要包括传感器容错设计、控制器容错设计和执行机构容错设计,对其容错的原理进行分析,将容错系统与非容
错系统的可靠性进行了对比,并采用消费级电子器件完成了容错控制系统原理件设计。
根据小型多旋翼无人机的特点,对传感器采用物理余度方法进行容错设计,简化设计以利于工程实现。
对控制器,通过选择具有看门狗设计和电源监控设计的微控制器,结合软件功能实现故障检测与隔离。
对执行机构即旋翼驱动系统,采用基于模型的故障检测方法进行故障检测,并结合多模式切换的控制律设计,实现执行机
构故障的容错控制。
本文建立了六旋翼无人机的详细模型,并完成了控制算法设计。
以此为基础,重点针对旋翼控制的故障进行了故障模式的分析,实现了模式切换控制律设计和仿真。
设计结果表明,以现有微机电技术和微控制器技术基础,对小型无人机控制系统进行容错设计,在略微提高系统成本和重量的情况下,很大提高小型无人机系统
可靠性,而且工程实现可行性很高。
六旋翼飞行器飞行原理

六旋翼飞行器飞行原理
六旋翼飞行器是一种多旋翼飞行器,由六个对称排列的螺旋桨提供升力和推力,以实现飞行的原理。
六旋翼飞行器的飞行原理可以简单地分为升力和姿态控制两个方面。
六旋翼飞行器通过螺旋桨产生的升力来支撑自身的重量,实现飞行。
螺旋桨通过高速旋转产生气流,使得飞行器在空气中产生上升力。
六个螺旋桨排列成六边形的形状,可以提供稳定的升力,使飞行器能够悬停在空中,或者在空中保持稳定的飞行。
六旋翼飞行器通过调节各个螺旋桨的转速和推力,以及调整螺旋桨的角度,来实现姿态控制。
通过改变螺旋桨的转速和推力,可以使飞行器向前飞行、向后飞行、向左飞行或向右飞行。
同时,通过调整螺旋桨的角度,可以使飞行器上升、下降、旋转或者倾斜。
通过这些方式的组合,飞行器可以在空中实现各种姿态的调整和运动。
六旋翼飞行器的飞行原理源于空气动力学的基本原理,即通过产生气流来产生升力,并通过调整气流的方向和力量来实现姿态控制。
六旋翼飞行器利用这些原理,通过精密的电子控制系统来调节螺旋桨的转速和角度,从而实现稳定的飞行和精确的姿态控制。
六旋翼飞行器的飞行原理不仅具有科技的魅力,还带给人们无限的想象空间。
它可以应用于各种领域,如航拍摄影、物流配送、搜救救援等。
通过六旋翼飞行器,我们可以将视野拓宽到无限远的天空,
感受飞行的快感和自由的美好。
让我们一起期待六旋翼飞行器带来的更多惊喜和便利吧!。
华测P500V六旋翼无人机介绍-1

华测P500V六旋翼无人机介绍产品简介华测P500V六旋翼无人机系统的机体和云台完全采用特殊的专业碳纤维材料制造,拥有更轻的重量和更高的强度,可折叠式支臂设计更方便运输。
华测P500V六旋翼无人机,可用于林业深林防火、中小面积航测、执行侦察、监视、搜索、协调指挥、通讯、空投等多种空中任务。
产品特点华测P500V六旋翼无人机系统引入了2.0B CAN总线系统,AAHRS(姿态、高度及航向参考系统)集成了加速度计、陀螺仪、磁力计、气压计、湿度计、温度计等多种高精度传感器和卓越的控制算法设计,飞行器的操控因而变得非常简单,即使操作者毫无遥控飞行的经验,也能够在很短的时间内学会安全地操控飞行。
华测P500V六旋翼无人机系统可以通过遥控器人工操控飞行,也可以借助独一无二的GPS Vigapoint系统执行自动驾驶飞行和拍摄任务。
基于模块化的设计理念,华测P500V六旋翼无人机可以灵活地更换机载任务设备以适应不同的作战任务要求。
从高分辨率的数码相机、高清视频摄像机、微光夜视摄像机到军用级的红外热成像摄像机。
基于华测P500V六旋翼无人机更大的载重,除图像和视频设备之外,还可以搭载根据用户需要定制的更多种任务设备,如空气采样设备,空中投放设备等,从而完成更多样化的任务。
华测P500V六旋翼无人机拥有优秀的安全设计,任何时候只要停止遥控器操作,飞行器就会自动悬停在空中。
如果遥控器信号中断时间超过30秒或者电池电量过低,飞行器就会自动缓慢迫降到地面或按照预定方案自动应对。
遥控信号受到干扰时,飞行器可以自动按原路返航。
飞控系统可以完整记录所有飞行相关数据信息,用于准确诊断飞行器故障判断飞行器事故原因。
华测P500V六旋翼无人机的动力系统拥有业内最强的野外环境适应性,可以在最高5级风下正常工作。
经过专业机构的严格高压电磁环境测试,华测P500V六旋翼无人机被确认在高压电磁环境下具有良好的抗干扰性和安全性,通过专业机构的EMC电磁环境兼容认证.技术参数一体化地面站华测P500V 六旋翼无人机地面站将电脑系统、通讯系统、视频系统、整合为一体,产品具有良好的便携性和环境适应性。
六旋翼物流无人机造型设计方案

六旋翼物流无人机造型设计方案
六旋翼物流无人机的设计方案可以考虑以下几个方面:
1. 六旋翼结构:可以采用具有良好稳定性和操控性的六旋翼结构,以确保无人机在各种气象条件下都能平稳飞行。
2. 机身材质:选择轻量化的材质,如碳纤维复合材料,以提高无人机的载重能力和飞行效率。
3. 机身外观设计:可以采用流线型外观设计,减少飞行时的空气阻力,提高飞行速度和稳定性。
4. 机身尺寸:根据物流需求,设计合适尺寸的无人机,以容纳不同大小的货物。
5. 抗风能力:考虑到物流无人机需要在各种复杂气象条件下飞行,设计方案应考虑提高无人机的抗风能力,以保证飞行的稳定性和安全性。
6. 动力系统:选择高效的电动动力系统,以提供足够的动力和长飞行时间。
7. 载重系统:设计合理的载重系统,包括承载货物的舱室、固定装置和安全锁定装置,以保证货物在飞行过程中的安全性。
8. 操控系统:配置先进的操控系统,包括自动驾驶和遥控操控功能,以确保无人机可以安全地飞行和交付货物。
总之,六旋翼物流无人机的设计方案应兼顾飞行性能、载重能力、稳定性和安全性,以满足物流需求并提高无人机的工作效率。
浅谈系留六旋翼无人机

技术平台浅谈系留六旋翼无人机曾文元,张瀚成,张 菲,李昊天,周祥辰(西北工业大学自动化学院,陕西 西安 710072)摘 要:近年来,随着现代航空技术、微处理技术、机器人技术及网络技术的发展,多旋翼无人机在众多领域都得到了广泛的应用。
本文对系留六旋翼无人机的机身主体、动力系统、控制系统、系留缆绳的构成等知识进行了简要介绍,通过制定的方案制作实物,使得系留无人机实现了长航时滞空执行任务。
关键词:系留缆绳;六旋翼无人机;飞行控制0 引言随着MEMS技术、无刷电机技术、微处理技术的发展,多旋翼无人机被广泛应用于影视航拍,救生医疗,监测侦查等领域。
多旋翼具有垂直起降,机械结构简单,易维护等优点,同时存在着续航时间短的缺点。
针对于系留六旋翼无人机而言,增加一根提供动力的系留缆绳,解决了续航时间短的问题。
1 机身主体简介系留六旋翼无人机机身由机架、起落架、云台组成。
机架作为六旋翼设备的承载平台,是实现功能的基础。
我们应当在机架能提供足够的有效载荷的情况下,尽可能减轻机身质量。
我们使用的是飞越T960机架,轴距为960mm,碳纤维材料,质量较轻,架构牢固,预留的空间多,自身可以进行器件布局。
从使用材料上说,市面上使用的机架材料较多的是碳纤维。
起落架的作用是支撑多旋翼的重力,避免螺旋桨与地面接触,减小起飞或者降落时地面产生的影响。
我们使用的是机体配套的飞越机架。
云台的作用是减小在飞行过程中因外部影响造成的相机抖动,同时也可以平稳转动,有利于目标侦查及图像稳定传输。
云台由电机和控制电路组成,由电机旋转完成摄像头的转动,可以根据拍照需求让摄像头从不同角度进行拍摄。
2 动力系统简介动力系统由螺旋桨、电池、电机、电调构成。
螺旋桨是产生推力的部件,有正桨和反桨之分。
桨叶一般用四个数字表示,前两位为直径,后两位是螺距。
桨叶的材料对桨叶的性能有很大的影响,我们采用的是碳纤维1855桨,这个桨具有噪音小、适用于高KV值电机、硬度大、刚性好等优点。
六轴无人机结构

1.结构形式
a)六旋翼无人机通常采用六个旋翼作为飞行器的动力源。
六个旋翼处于同一平面。
相邻两旋翼,一个逆时针
旋转,一个顺时针旋转,以抵消反扭矩作用力。
六个电机对称的安装在飞行器的支架末端。
且对角线上相对的两旋翼旋向相反。
支架中间的工作台上方信号接送机,GPS定位模块等,中间层放飞行控制计算器、电流电调集成板。
下层安装飞行器电池,并且预留空间作为模块化元件的存放空间(如航拍所需的摄像机和云台、实时监测的传感器模块、采水装置等)。
六旋翼无人机最大的优点在于升级空间广阔,动力充足,飞行平稳以及抗逆性优秀。
机架形势图如1-1。
1-1
1.2工作原理
以下为六轴无人机基本运动的原理
1.3 机架与叶桨的选择
1.3.1桨叶的选择
对流角进行近似计算后导出一下公式
由此等式可知,螺旋桨的阻力扭转,其大小取决于桨叶的螺旋角和桨叶表面的粗糙程度,现拟定1255MOTOR 碳纤维桨作为无人机的工作桨。
1.3.2机架的选择。
六旋翼无人机原理

六旋翼无人机原理
六旋翼无人机是一种利用了六个旋转的螺旋桨来实现垂直起降、悬停以及高度控制的无人机。
其工作原理基于物理学里的牛顿第三定律以及空气动力学的基本原理。
首先,六旋翼无人机的螺旋桨是通过电机驱动进行旋转的,每个螺旋桨都可以独立地控制旋转速度和方向。
通过同时调节六个螺旋桨的转速和方向,可以实现无人机的稳定的垂直起降和悬停。
根据牛顿第三定律,当旋转的螺旋桨产生向下的推力时,相对应的无人机就会受到一个向上的反作用力。
通过调节螺旋桨的转速和受力方向,可以控制无人机的上升和下降。
同时,通过调整不同螺旋桨的转速和受力方向,可以实现无人机的向前、向后、向左、向右的运动。
空气动力学原理是六旋翼无人机工作的关键。
螺旋桨旋转产生的推力和对空气的阻力产生了一个力和力矩,使得无人机能够在空中保持平衡。
由于六个螺旋桨呈对称分布,可以使得无人机维持稳定的飞行姿态。
为了提高稳定性和操控性,六旋翼无人机通常配备了陀螺仪、加速度计、磁力计等传感器,用于感知无人机的姿态和运动状态。
根据传感器提供的数据,无人机可以自动地调整螺旋桨的转速和受力方向,以保持稳定的飞行。
总之,六旋翼无人机利用六个旋转的螺旋桨通过控制转速和受
力方向实现垂直起降、悬停和运动。
通过空气动力学原理和传感器的帮助,无人机能够保持稳定的飞行姿态和操控性。
六轴旋翼碟形飞行器控制系统设计

六轴旋翼碟形飞行器控制系统设计六轴旋翼碟形飞行器控制系统设计六轴旋翼碟形飞行器是一种新型的飞行器,因其具有灵活性、稳定性和高空机动性而备受关注。
在本文中,我们将介绍六轴旋翼碟形飞行器的控制系统设计。
六轴旋翼碟形飞行器由一个圆形盘面和六个旋翼组成。
每个旋翼由一个电动机驱动,其旋转方向以及旋转速度可以通过相应的控制器进行调整。
控制器由传感器、处理器和执行器组成,其主要功能为接受来自传感器的反馈数据,经过处理后控制执行器的工作。
传感器包括加速度计、陀螺仪、磁力计和气压计。
加速度计用于测量飞行器的加速度,陀螺仪用于测量飞行器的角速度,磁力计用于测量飞行器的方向和位置,气压计用于测量飞行器的高度和气压。
传感器的数据将传输到处理器进行处理。
处理器主要由微控制器和存储器组成。
微控制器处理传感器数据,并计算出六个旋翼的工作参数。
存储器用于存储处理器的程序和数据。
处理器计算完成后,将送到执行器控制器进行执行器控制。
执行器控制器由电调和旋翼马达组成。
电调用于控制马达的电流和电压,从而控制旋翼的转速。
旋翼的转速和旋转方向将影响飞行器的方向和姿态,因此执行器控制器的工作非常重要。
飞行器控制系统的设计主要考虑到三个方面:飞行器的稳定性、高度控制和方向控制。
稳定性是指飞行器在飞行时的保持平衡和稳定。
高度控制是指飞行器在垂直方向上的稳定性和高度控制。
方向控制是指飞行器在水平方向上的稳定性和方向控制。
为了保持稳定性,飞行器需要根据传感器数据调整旋翼的转速和转向。
例如,如果飞行器向左倾斜,则需要增加右侧的旋翼的转速或减少左侧的旋翼的转速。
这将使飞行器保持平衡和稳定。
高度控制是通过控制旋翼的转速和方向实现的。
例如,如果飞行器下降,则需要增加旋翼的转速,如果飞行器上升,则需要减少旋翼的转速。
这将使飞行器在垂直方向上稳定和控制高度。
方向控制是通过调整飞行器的方向来实现的。
例如,如果飞行器需要向右转,则需要增加左侧旋翼的转速或减少右侧旋翼的转速。
六旋翼控制

0 Hi 0 J ri
陀螺力矩
作用在无人机上的外部力矩
M M B Hi M M
d ( J ) J J M B dt
转动方程
转动方程
z
M1 M5 M6 M2
x
M3 M4 y
六旋翼飞行器的主要运动
左飞、右飞
增大3、4号旋翼的转速并减小5、6号 旋翼的转速,可以在x轴上产生一个 正力矩,该力矩会导致机体的横滚 角 为正,即机体向右倾斜。这会导 致旋翼所产生的总拉力在y轴上有一 个负分量,该分力拉动机体向右飞 行。 减小3、4号旋翼的转速并增大5、6号 旋翼的转速,可以在x轴上产生一个 负力矩,该力矩会导致机体的横滚 角 为负,即机体向左倾斜。这会导 致旋翼所产生的总拉力在y轴上有一 个正分量,该分力拉动机体向左飞 行。
T
Jy
俯仰方向上的力矩为 横滚方向上的力矩为 偏航方向上的力矩为
1 M l[ F1 F2 ( F3 F4 F5 F6 )] 2
M 3 l ( F3 F4 F5 F6 ) 2
M C ( F1 F2 F3 F4 F5 F6 )
转动方程
F3 F4 , F5 F6 u4 F1 F2
转速(拉力)分配
M1
M5
M6 M2M5 M6 NhomakorabeaM1M2
M3 M4
M3 M4
初始拉力分配条件
改进拉力分配条件
F1 F2 F3 F4 F5 F6
F1 1/ 6 0 F 0 2 1/ 6 F3 1/ 6 0.2887 F4 1/ 6 0.2887 F 1/ 6 0.2887 5 F6 1/ 6 0.2887 1/ 3 1/ 3 1/ 6 1/ 6 1/ 6 1/ 6 1/ 6 1/ 6 1/ 3 u1 u 1/ 6 1/ 6 1/ 3 2 1/ 6 1/ 3 1/ 6 u3 1/ 6 1/ 3 1/ 6 u4 1/ 6 1/ 6 1/ 6 0 1/ 6 1/ 6 1/ 6 0
六旋翼无人机系统管理

0.9km
输出功率
1W可调
调制方式
COFDM
无线视频发射部分
输出频率范围MHz
285-900MHZ可选择
射频带宽MHz
2.5MHz
输出功率
1W
载噪比C/N
≥25dB @ 27dBm
调制方式
COFDM
星座调制
QPSK/16QAM @ 1.25/2.5MHz, QPSK/16QAM/64QAM @ 6/7/8MHz
文档编号
文档文名称:★★★★★★★★★★
文档密级
★★★★★
文档制订
陈先生
分享资料,共同进度
文档审核
周小姐
15、音频左右声道、立体声非平衡输入,支持一路语音信号输出
16、视频输入PAL/NTSC可选
17、发射机输出功率可调
技术参数:
无线数字发射部分
输出频率范围
900-928MHZ
射频带宽
6/7/8MHz或1.25/2.5MHz
分享资料,共同进度
文档审核
周小姐
1.3机体结构
机体结构采用新型复合材料,材质选用美国DuPont公司高强度碳纤维合成材料和7075航空铝合金材料,7075航空铝合金抗拉强度≥560MPa 。
机体结构拟采用框架式结构,保证了机体结构稳固。
在材料实验室对无人机机体制造材料进行力学、耐腐蚀和抗拉强度等方面测试。
11、9个可转换通道;?
12、8个特色飞行环境;
13、失控保护 / 通道功能/EPA/微调;
14、双向舵量比率设定与EXP??;?
15、舵机反转开关;?
16、舵机速度设定 (每个方向可达25s);
17、舵机监测;
六轴无人机飞行培训(A版)

一、六轴多旋翼飞行器系统组成(4课时)六轴多旋翼飞行器主要由机架、飞控、螺旋桨、锂电池、电调、电机等组成。
机架:机架是六轴多旋翼飞行器的基础平台,电机、飞控、电调等设备都需要直接安装到上面。
除基本的满足强度、刚度、重量轻等要求外,其功能还包括:①提供安装接口,如安装电机的固定位置。
②可折叠,四个轴臂和支架都是可以松开螺杆并折叠,方便装车运输。
飞控:飞控是六轴多旋翼飞行器的核心,本机使用的是大疆的WOOKONG-M飞控,包含主控板、IMU、GPS指南针。
功能有:①在没有控制的情况下,WOOKONG-M飞控可以使其自主平衡飞行和定位悬停飞行。
②人为遥控或者自主控制的信号,控制六个电调的输出,进而调整螺旋桨的转速,来调节飞行器的起飞、悬停、俯仰、滚转、偏航、降落等机动。
电调:电调全称电子调速器,英文electronic speed controller,简称ESC。
针对电机不同,可分为有刷电调和无刷电调。
它根据控制信号调节电动机的转速。
航空模型就是通过遥控对航模无刷电子调速器的控制以达到调整飞机的各种飞行姿态和动作。
电机:本机选择无刷电机作为飞行的动力。
无刷电机具有寿命长、噪音小、可控性强等优点。
锂电池提供的是直流电,电子调速器将其变成三相交流电,遥控器或飞控发出控制信号,控制电机的转速,实现对飞机飞行的控制。
螺旋桨:螺旋桨是为飞行器提供升力的唯一部件,其选择和电机KV值相关。
一般KV 值较大的电机选择高速桨,KV值较小的选择低速桨。
螺旋桨一般为木质、塑料、碳纤维等,根据飞行器的参数要求选择。
二、安装、调参、指南针校准(6课时)正确安装是飞行器安全飞行的前提,安装时务必详读WOOKONG-M飞控用户手册,按照上面的要求进行安装,下图是WOOKONG-M飞控用户手册中安装说明图。
按照WOOKONG-M飞控用户手册进行调参和指南针校准。
图一、wookong-M飞控安装说明图三、基础飞行(10课时)1、飞行前检查1)飞行器安装正确2)参数设置正确3)连线正确4)遥控器电池、机上电池电量充足2、选择控制模式本飞控系统有手动模式、姿态模式和GPS姿态模式可供选择,通过以下步骤进入不同的模式:5)利用遥控器的一个3位开关作为控制模式开关,该开关的不同档位对应不同的控制模式。
基于六旋翼无人机的智能防控系统总体设计
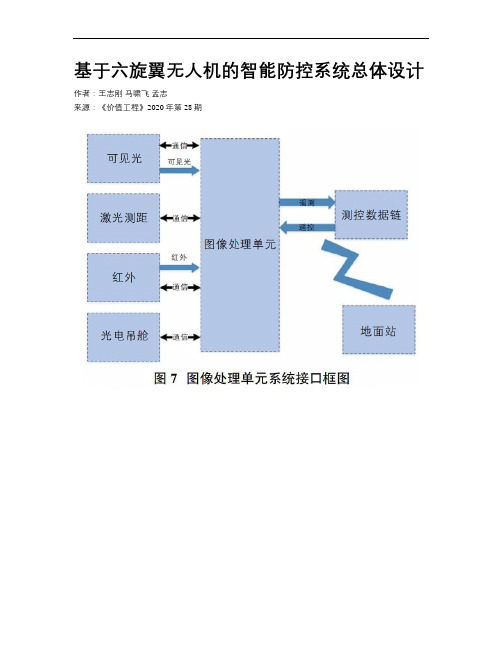
基于六旋翼无人机的智能防控系统总体设计作者:王志刚马啸飞孟志来源:《价值工程》2020年第28期摘要:针对复杂环境下仓库智能管理的需求,探索新型的仓库管理方式来改进或取代现有的传统管理方式成为必要。
本文以六旋翼无人机为平台,对仓库智能防控系统进行了总体设计,提出总体系统方案,利用数学模型对六旋翼无人机动力系统进行性能分析,设计逆向求解最优配置算法,并提出可供参考的实物和参数建议。
Abstract: To meet the needs of intelligent warehouse management in complex environments,it is necessary to explore new warehouse management methods to improve or replace the existing traditional management methods. In this paper, the six-rotor UAV is used as a platform for the overall design of the warehouse intelligent prevention and control system, and the overall system plan is proposed. The mathematical model is used to analyze the performance of the six-rotor UAV power system, the optimal configuration algorithm for reverse solution is designed, and the suggestions for real objects and parameters are put forward for reference.關键词:智能防控;六旋翼无人机;系统;模型Key words: intelligent prevention and control;six-rotor UAV;system;model中图分类号:V279;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;; 文献标识码:A;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;; 文章编号:1006-4311(2020)28-0200-050; 引言目前仓库安防手段主要是定点监控和人员巡逻,随着定点监控的智能化越来越高,在一定程度上减少了人员巡逻的压力,但对于较大仓库,仍然存在一些问题:①定点监控位置相对较为固定,监控会存在一定死角,监控距离的调整和清晰度受到一定的限制。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
六旋翼无人机系统技术文件
一、产品名称:六旋翼无人机系统
二、X-6是全新研制的六旋翼无人机系统,具有载重能力较强、续航时间理想、
与X-8无人机相比,体积更小、重量较轻、目标特性小,使用更加快捷、机动灵活、操作使用及维修简便等特点,自成体系独立执行电力巡检任务,稳定度与性能相对x-8无人机稍有逊色。
简介:
X-6 无人机是由专业无人机技术研发团队经过多年研究、测试,最新推出的一款全球同类产品载重量最大、可垂直起降、拥有多项专利的无人飞行系统。
1)选用自主驾驶设备,大大提高飞控稳定性。
2)可携带多种任务载荷。
3)可用于执行资料收集、测量、检测、侦查等多种空中任务,在电力巡检领域能发挥其高效、隐蔽性强的特点,能对目标物进行远距离监视。
产品特点:
(1)飞行器具有遥控、自主飞行能力,可以实时修改飞行航路和任务设置;(2)测控与信息传输设备具有遥控、实时信息传输的功能,具有多机、多站兼容工作及一定的抗截获、抗干扰能力;
(3)侦察任务设备能昼夜实时获取目标图像信息,具有手动、自动控制工作模
式,可迅速发现、捕获、识别、跟踪目标;
(4)飞行控制与信息处理站具有对飞行器进行遥控飞行和对机载任务设备进行操控的功能,具有飞行参数/航迹显示、航路规划和实时修改飞行计划、重新设置任务样式的能力;具有通过视频眼镜实现第一视角控制飞行的能力;具有接收标准视频信号、实时处理/存储图像、数据叠加等能力,具有目标定位和引导打击的能力,且能与上级指挥机关、情报处理中心和指挥系统相通连;
(5)地面保障设备具有简易检测、维修与训练的能力,具有快速更换易
损件、备用动力电池组和双模态充电的功能;
(6)全系统外场展开迅速,具有车载大范围机动和携行能力。
机体结构技术参数:
无刷电机及电调系统
技术参数:
型号: V4010 450KV KV: 375
槽数,极数:: 18N24P 电机外径: Φ
电机长度:
出轴直径:
净重:105g 不含线
重量: 125g (含长线重)空载电流: @
内阻: 71mΩ
电调系统
采用分立式设计,各元器件采用集成化设计,具有体积小、重量轻、引出线和焊接点少、寿命长、可靠性高、性能好等优点。
电调输出能力:持续电流40A,短时电流60A;
高性能锂离子聚合物电池
1.额定电压:12V
2.额定容量:30Ah
3.内阻:≤30mΩ
4.放电截止电压:
5.充电限制电压:
6.最大充电电流:1C
7.充电方法:CC/CV(恒流恒压)
8.最大放电电流:3C
9.循环寿命2000次
机体结构
机体结构采用新型复合材料,材质选用美国DuPont公司高强度碳纤维合成材料和7075航空铝合金材料,7075航空铝合金抗拉强度≥560MPa 。
机体结构拟采用框架式结构,保证了机体结构稳固。
在材料实验室对无人机机体制造材料进行力学、耐腐蚀和抗拉强度等方面测试。
2、X-6(control system)飞控系统
技术参数:
工作电压 DC
功耗≤5W
工作温度 0°C 到 +30°C
内置功能悬停精度
垂直方向: ±,水平方向: ±
抗风能力:4级
最大旋转角度 35°
垂直方向速度±6m/s
通信系统:
硬件接口:RS-232
通信频率
信号吞吐量:最大 11,520 bps
通信距离、信号同步传输距离(室外开阔):≤11km 使用普通天线≤32km 使用高增益天线
软件图示
3 X-6型多通道无人机遥控及接收装置
基本特点:
1、8通道遥控器;???
2、兼容AFHSS PPM/PCM (当同SPECTRA PRO使用时可兼容PPM/PCM);
3、拥有13cm宽的屏幕,照明灯, 像素为320*80,高清易操作的触摸屏;????
4、可定制菜单;
5、模型种类设定一步完成;
6、多任务化数字修正;?
7、可转换的控制开关,按钮,操作杆及数字修正;
8、高灵敏度,带滚珠轴承的万向接头;?
9、可选择的四种操作杆模式 (另加两个额外的手动模式)
10、电源管理系统;
11、9个可转换通道;?
12、8个特色飞行环境;
13、失控保护 / 通道功能/EPA/微调;
14、双向舵量比率设定与EXP??;?
15、舵机反转开关;?
16、舵机速度设定 (每个方向可达25s);
17、舵机监测;
18、8种可编混合控制;
19、教飞/仿真功能
独有的双向遥测功能可以在飞行当中测量:
1、接收机的工作电压;
2、发动机的温度;
3、电池温度;
4、飞行高度;
5、飞行整度;
6、飞行方向;
7、油量;
8、接收机信号强度;
9、GPS信息等
专用高强度铝合金遥控箱
4、X-6六旋翼无人机便携式地面站系统
特点:
1)采用高强度工程塑料作为壳体、坚固耐摔、防水性好,适合在野外进行作业。
2)屏幕采用17寸高亮度液晶屏。
3)配置高性能工业级计算核心。
4)内置高灵敏度数字接收机。
5)采用定向卫星自动跟踪天线系统。
6)支持操作杆及键盘等操作。
地面站系统框图
地面站长度985mm
地面站宽度762mm
地面站高度286mm
地面站重量
内置锂电池容量18000mA
电池工作时间5小时
显示屏数量 2
图像显示屏17寸高亮度在强光下可视、14寸旋转屏液晶屏
处理器类型i5 480M 内存4G
存储器容量500G 接口、VGA、HDMI 鼠标内置鼠标板
数字接收机
输入频率范围900-928MHz
射频带宽
接收灵敏度-94dBm
-92dBm @ 6/7/8MHz 解调方式COFDM
接收天线全向天线
无线视频接收系统
产品特性
图像输出:一路模拟PAL/NTSC自适应,Full D1画质,720×576像素
●语音输出:一路立体声,左右两个声道
●接收门限: -105dBm(10-6 BER @2 MHz信道宽度);
-104dBm(10-6 BER @4MHz信道宽度)
●供电电源: AC220V,功耗小于8W
5机载无线数字视频传输系统
产品特点:
1、端到端超低延时(小于300ms)
2、具有体积小特点(最轻170g),适合在对体积有要求的设备中安装,如无人机,机器人等
3、具有ABS发射加密功能
4、支持一路标准数据传输(RS232电平,支持1200~115200),可以用于实时传输
GPS、飞机姿态信息等数据
5、散热片式铝材机壳,防水、防尘、抗冲击性好
6、模块化设计,锂电池供电,电池可更换也可借助设备上的DC12V直接供电
7、可选全封闭式防水机箱,带来更高的系统安全性
8、具有超视距(NLOS----NO LINE OF SIGHT)、运动中传输的特点
9、工作频率可调,即在指定的频率范围内可以自行设定
10、内置高性能功放
11、发射机采用加密技术,可以阻止他人接收相同频率的信号
12、采用COFDM调制技术和MPEG—2图像压缩技术,确保信号传输的稳定和音视
频的高质量
13、采用全向天线发射信号
14、可以同步输入音视频信号
15、音频左右声道、立体声非平衡输入,支持一路语音信号输出
16、视频输入PAL/NTSC可选
17、发射机输出功率可调
技术参数:
无线视频发射部分
输入视频制式PAL/NTSC
视频白条幅度mV 650~720mV
视频同步幅度mV 260~275mV
6无人机增稳云台系统
特点:
可进行X/Y俩轴控制并自动水平稳定的无人机自稳定云台,包括机载姿态传感器,与所述机载姿态传感器相连的单片机,与所述单片机相连的伺服驱动装置,由所述伺服驱动装置驱动的X轴角度调整装置、Y轴角度调整装置;所述单片机用于接收机载姿态传感器的数据,并运算该数据得到伺服驱动信息,并将该伺服驱动信息传给伺服驱动装置,由伺服驱动装置驱动相应的X轴角度调整装置、Y轴角度调整装置。
本实用新型的无人机自稳定云台,使地面人员可通过地面控制设备对,使机载设备(如高清相机、摄像机等)进行X轴/Y轴/Z轴运动,使其达到图像的稳定度和方位的准确度。
增稳云台原理图
7机载设备
NEX-5单反相机(日本索尼)
技术参数
微单
Exmor APS HD CMOS
*
1610万
1610万
4912×3264
索尼NEX-5显示功能
3英寸 92万像素液晶屏
索尼NEX-5快门性能
30-1/4000秒
B门
闪光同步速度
索尼NEX-5曝光控制
自动曝光,程序自动曝光(P),光圈优先(A),快门优先(S),
手动曝光(M),扫描全景(2D,3D),动作防抖,场景选择
±3EV(1/3EV步长)
索尼NEX-5拍摄性能
光学防抖
AVCHD:1920×1080(50p,平均比特率28Mbps)
支持
支持(10张/秒)
连拍数量:JPEG(标准/精细):10张/10张
8无人机专用运输箱
序号项目技术参数
1 长宽高900mm×900mm×650mm
二、主要设备配置清单。