现代控制理论课件(第三版),刘豹主编,机械工业出版社
《现代控制理论》课件

目录
• 引言 • 线性系统理论 • 非线性系统理论 • 最优控制理论 • 自适应控制理论 • 鲁棒控制理论
01
引言
什么是现代控制理论
现代控制理论是一门研究动态系统控制的学科,它利用数学模型和优化方法来分析 和设计控制系统的性能。
它涵盖了线性系统、非线性系统、多变量系统、分布参数系统等多种复杂系统的控 制问题。
20世纪60年代
线性系统理论和最优控制理论得到发展,为现代控制理论的建立奠定 了基础。
20世纪70年代
非线性系统理论和自适应控制理论逐渐发展起来,进一步丰富了现代 控制理论的应用范围。
20世纪80年代至今
现代控制理论在智能控制、鲁棒控制、预测控制等领域取得了重要进 展,为解决复杂系统的控制问题提供了更有效的工具。
01
利用深度学习算法对系统进行建模和学习,实现更高
效和智能的自适应控制。
多变量自适应控制
02 研究多变量系统的自适应控制方法,以提高系统的全
局性能。
非线性自适应控制
03
发展非线性系统的自适应控制方法,以处理更复杂的
控制系统。
06
鲁棒控制理论
鲁棒控制的基本概念
鲁棒控制是一种设计方法,旨在 提高系统的稳定性和性能,使其 在存在不确定性和扰动的情况下
自适应逆控制
一种基于系统逆动态特性的自适应控制方法,通过对系统 逆动态特性的学习和控制,实现系统的自适应控制。
自适应控制系统设计
系统建模
建立被控对象的数学模型,包括线性系统和非线性系统。
控制器设计
根据系统模型和性能指标,设计自适应控制器,包括线性自适应控制器和 非线性自适应控制器。
参数调整
根据系统运行状态和环境变化,调整控制器参数,以实现最优的控制效果 。
课件-现代控制理论-刘豹第三版-0绪论
1.1 控制理论的发展历程
经典控制理论 现代控制理论 新发展——大系统理论 智能控制
发表了《Cybernetics》- -控制学科诞生
经典控制理论(1935-1950)
存在的问题
1、简单对象 单输入单输出、线性、时不变系统
2、缺乏系统化方法 图形化方法,依赖于设计人员的经验
3、达到的性能要求较低,不能处理多目标性能。
面临的挑战
对象日益复杂化、控制性能要求不断提高。
3、解决的方法2---现代控制理论
1.1.3 现代控制理论的发展
70年代中期,自动化的应用开始面向大规模、复杂的系统, 如大型电力系统、交通运输系统、国民经济系统等,运用现 代控制理论方法已不能取得应有的成效,于是出现了:
——大系统理论
是指规模庞大、结构复杂、变量众多的信息与控制系统,如 生产过程、交通运输、生物工程、社会பைடு நூலகம்济和空间技术等复 杂系统。 研究对象:着重解决生物系统、社会系统这样一些众多变量 的大系统的综合自动化问题。 研究方法:时域法为主 重点:大系统多级递阶控制 核心装置:网络化的电子计算机
引言
面对未知及不断变化的世界,人 类发明了无数理论和工具,控制 论就是其中之一。
控制论是一种思想、一种方法、 一种工具、一门学科。
人类在20世纪所取得的巨大技术 成就,控制科学与技术的作用非 常显著。
引言
钱学森曾经从生产力,特别是技术革 命的进程分析了控制论的产生和发展。
课件-现代控制理论-刘豹第三版-第5章

能控性与能观性的判别方法
能观性判别方法
能控性判别方法
表示系统是否可以通过输入控制实现任意状态转移。若系统完全能控,则可以通过设计合适的控制器实现任意状态轨迹的跟踪或镇定;若部分能控或不能控,则存在状态无法被有效控制的风险。
能控性的物理意义
表示系统状态是否可以通过输出完全反映出来。若系统完全能观,则可以通过观测输出信号来准确估计系统状态;若部分能观或不能观,则存在状态无法被准确观测的风险,进而影响控制性能的实现。
控制系统稳定性分析是控制理论的核心内容之一,对于确保控制系统的正常运行具有重要意义。
章节内容结构
稳定性概念及定义
介绍稳定性的基本概念和定义,包括Lyapunov稳定性和BIBO稳定性等。
线性系统稳定性判据
详细阐述线性系统稳定性的判据,如Routh-Hurwitz判据、Nyquist判据和Bode图等。
图解法
状态转移矩阵的计算方法
1
2
3
状态转移矩阵反映了系统在时间间隔内从初始状态到最终状态的动态变化过程。
描述系统状态的动态变化过程
若系统稳定,则状态转移矩阵将逐渐趋于零,表示系统状态将逐渐趋于稳定。
反映系统稳定性
状态转移矩阵是进行系统分析和设计的重要工具,可用于研究系统的稳定性、能控性、能观性等性质。
非线性系统稳定性分析
介绍非线性系统稳定性分析方法,如相平面法、Lyapunov直接法等。
熟练掌握线性系统稳定性的判据和分析方法,能够应用所学知识分析和设计线性控制系统。
了解非线性系统稳定性分析方法的基本原理和应用范围,能够运用所学知识分析和设计简单的非线性控制系统。
掌握稳定性的基本概念和定义,理解不同稳定性定义之间的联系与区别。
现代控制理论.pptx

第0章 引论
1892年,前沙俄数学家李雅普诺夫(A.M. Lyapunov)在其 博士论文“运动稳定的一般问题”中提出Lyapunov稳定性判别 方法,包括第一法和第二法,系统地建立了动力学系统稳定性 的一般理论。
第0章 引论
3.2 经典控制理论阶段
第一次工业革命时期,瓦特(J.Watt)使用的自动调节进气 阀门以控制蒸汽机转速的离心式(飞球式)调速器,是闭环自动 控制系统应用的第一项重大成果。
物理学家麦克斯韦(J.C. Maxwell)与1868年在“论调节器” 论文首次提出反馈控制的概念,对瓦特调速器系统中的不稳定现 象进行研究,开辟了自动控制作为一门科学发展的开端。
参加本课程的同学必须人手1册教材、出勤听课、听 课并记笔记和完成作业。
(缺课达到1/3,缺作业达1/4者取消正常考试资格)
第0章 引论
教材选用: 【1】刘豹, 唐万生. 现代控制理论: 第3版. 北京:机械工业出版社, 2006 主要参考书: 【1】郑大钟. 线性系统理论: 第2版. 北京:清华大学出版社, 2002 【2】 (美)J.J.Dazzo, (美) R.H.Houpis. Linear Control System Analysis and Design: Fourth Edition. 英文影印版. 北京:清华大 学出版社,2000 【3】 (美) R. C. Dorf, (美)R. H. Bishop. Modern Control System: Eleventh Edition. 英文影印版. 北京:电子工业出版社,2009
《现代控制理论(第3版)》刘豹 唐万生课件 第4章

的。李雅普诺夫根据系统自由响应是否有界把系统的稳定性定义为四种情况。
1.李雅普诺夫意义下稳定 2.渐近稳定 3.大范围渐近稳定 4.不稳定
4.2 李雅普诺夫第一法
4.2.1 线性系统的稳定判据 线性定常系统
(1) 平衡状态 实部。 以上讨论的都是指系统的状态稳定性,或称内部稳定性。但从工程意义 渐近稳定的充要条件是矩阵A的所有特征值均具有负
是从
开始观察的时间变量。 式(2)实际上描述了系统式(1)在n 维状态空间中从初始条件 发的一条状态运动的轨迹,简称系统的运动或状态轨线。 若系统式(1)存在状态矢量 ,对所有 ,都使: (3) 成立,则称 为系统的平衡状态。 出
对于一个任意系统,不一定都存在平衡状态,有时即使存在也未必是唯
一的,例如对线性定常系统:
1.标量函数的符号性质 设 为由 维矢量 所定义的标量函数, ,如果: ,且在 处恒
有
所有在域
。
中的任何非零矢量
2.二次型标量函数 二次型函数在李雅普诺夫第二方法分析系统的稳定性中起着很重要的作 用。 设 为n个变量,定义二次型标量函数为:
(8)
矩阵 P 的符号性质定义如下: 设P 为 实对称方阵, 为由P 所决定的二次型函数。
称稳定判据。 ②若 来说,除去 为负定;或者虽然 外,对 为半负定.但对任意初始状态 不恒为零。那么原点平衡状态是渐近稳 ,则系统是大范围渐近稳定
定的。如果进一步还 的。此称渐近稳定判据。
③若 4.3.3
1)
为正定,那么平衡状态 对李雅普诺夫函数的讨论
是不稳定的。此称不稳定判据。
是满足稳定性判据条件的一个正定的标量函数,且对x应具
由稳定性判据可知,当
为正定对称矩阵时,若
现代控制理论--刘豹优秀PPT

1.3.1 从系统框图出发建立状态空间表达式 该法是首先将系统的各个环节,变换成相应的模拟结构图,并把每个积
1.4.2 传递函数中有零点时的实现
22
此时,系统的微分方程为: 相应地,系统传递函数为:
设待实现的系统传递函数为:
因为
上式可变换为
(26)
23
令 则 对上式求拉氏反变换,可得: 每个积分器的输出为一个状态变量,可得系统的状态空问表达式:
24
或表示为:
推广到 阶系统,式(26)的实现可以为:
25
(4)
6
在经典控制理论中,用指定某个输出量的高阶微分方程来描述系统的 动态过程。如上图一所示的系统,在以 作输出时,从式(1)消去中间变量 i,得到二阶微分方程为:
(5)
其相应的传递函数为:
(6)
回到式(5)或式(6)的二阶系统,若改选 和 作为两个状态变量,
即令
则得一阶微分方程组为:
7
设单输入一单输出定常系统,其状态变量为 状态方程的一般形式为:
2
1.1.3 状态方程 以状态变量
为坐标轴所构成的 维空间,称为
状态空间。
1.1.4 状态方程
由系统的状态变量构成的一阶微分方程组称为系统的状态方程。 用图下所示的 网络,说明如何用状态变量描述这一系统。
图一
3
根据电学原理,容易写出两个含有状态变量的一阶微分方程组:
亦即
(1)
式(1)就是图1.1系统的状态方程,式中若将状态变量用一般符号 ,
现代控制理论第3版刘豹唐万生课后全部答案机械工业出版社
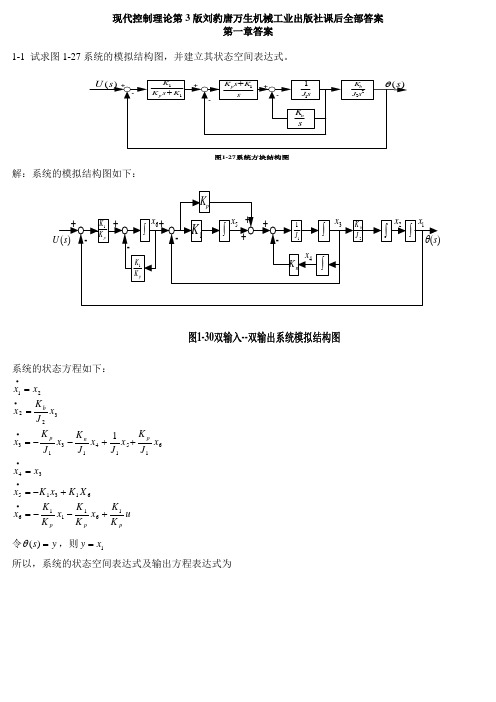
现代控制理论第3版刘豹唐万生机械工业出版社课后全部答案第一章答案1-1 试求图1-27系统的模拟结构图,并建立其状态空间表达式。
图1-27系统方块结构图解:系统的模拟结构图如下:图1-30双输入--双输出系统模拟结构图系统的状态方程如下:uKK x KK x KK x X K x K x x x x J Kx J x J K x J Kx x J K x x x ppppn pb 1611166131534615141313322211+--=+-==++--===∙∙∙∙∙∙令y s =)(θ,则1x y =所以,系统的状态空间表达式及输出方程表达式为[]⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡=⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡+⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡-----=⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡∙∙∙∙∙∙65432116543211111111265432100000100000000000000010010000000000010x x x x x x y uK K x x x xx x K K K K K K J K J J K J KJ K x x x x x xp p pp n pb1-2有电路如图1-28所示。
以电压)(t u 为输入量,求以电感中的电流和电容上的电压作为状态变量的状态方程,和以电阻2R 上的电压作为输出量的输出方程。
U图1-28 电路图解:由图,令32211,,x u x i x i c ===,输出量22x R y =有电路原理可知:∙∙∙+==+=++3213222231111x C x x x x R x L ux x L x R 既得22213322222131111111111x R y x Cx Cx x L x L R x uL x L x L R x =+-=+-=+--=∙∙∙写成矢量矩阵形式为:[]⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎣⎡----=⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡32121321222111321000010111010x x x R y u L x x x CCL L R L L R x x x 。
现代控制理论基础第一章 绪论PPT课件

上午11时19分
4
绪论-控制理论研究的内容
保持器
被控对象
采样
控制器
D/A
计算机
A/D
控制:是指为了改善系统的性能或达到特定的目的,通过信息的采集和加工而 施加到系统的作用。控制系统由控制部分和被控对象组成,两者往往形成双向 的信息流联系。控制部分一般由传感器、控制器和执行器组成。传感器用来采 集信息,并把它变换到合适的形式,传送到控制器。控制器用来加工信息、产 生控制信号,这是控制系统的核心。执行器则将控制器产生的控制信号进行放 大和变换,以此产生控制作用,最终施加到被控对象上。通常把进入控制系统 的信息加工成控制信息的规则,称为控制算法。设计和实现控制算法是控制理 论中最重要的研究课题。在控制系统中实现控制算法的部件称为控制器,设计 和研制各种控制器则是控制工程最重要的任务。
• 万百五。控制论-概念、方法与应用。北京:清 华大学出版社 ,2009
上午11时19分
2
第一章 绪论
① 控制理论研究的内容 ② 控制理论的发展 ③ 现代控制理论的主要内容 ④ 本课程的主要内容 ⑤ 需要的预备知识
上午11时19分
3
绪论-控制理论研究的内容
• 系统:控制理论的研究对象。由相互关联 和制约的若干部分所组成的具有特定功能 的一个整体。
论。
• 1960第一届IFCA大会上庞特里亚金、贝尔 曼和卡尔曼报告了他们的工作,宣告建立 现代控制理论学科。
上午11时19分
12
绪论-现代控制理论主要内容
• 线性控制系统理论
《现代控制理论》第三版课件_第1-2章
a1n (t ) a2 n (t ) ann (t ) b1r (t ) b2 r (t ) bnr (t )
系统矩阵
控制矩阵
c11 (t ) c12 (t ) c (t ) c (t ) 22 21 C (t ) = c (t ) c (t ) m1 m2
输出向量
a11 (t ) a12 (t ) a (t ) a (t ) 22 A(t ) = 21 a (t ) a (t ) n1 n2 b11 (t ) b12 (t ) b (t ) b (t ) 22 B (t ) = 21 b (t ) b (t ) n1 n2
3、分形系统仿真 Mandelbrot图
第一章 绪论
1.1 几个基本概念
控制系统(control system):为了达到预期的 目标而设计出来的系统,它由相互关联的部件组 合而成。 自动控制 (automatic control):指在无人直接参 与的情况下,通过一定的控制手段,使被控对象 自动地按照预定的规律进行。 状态空间 (state space)
用状态变量描述系统运动的方程式称为 状态方程。
x = A(t ) x(t ) + B(t )u (t ) y = C (t ) x(t ) + D(t )u (t )
x1 (t ) x (t ) x(t ) = 2 状态向量 x (t ) n y1 (t ) y (t ) y= 2 y (t ) m u1 (t ) u (t ) u (t ) = 2 控制向量 u (t ) r
现代控制理论
Modern Control Theory
现代控制理论课件(第三版)-刘豹主编-机械工业出版社

1970——1980 大系统理论 控制管理综合 1980——1990 智能控制理论 智能自动化 1990——21c 集成控制理论 网络控制自动化 专家系统,模糊控制,人工智能 神经网络,人脑模型,遗传算法
Soft computing
控制理论与计算机技术相结合→计算机控制技术
Modern Control Theory
Modern Control Theory
L01
绪论
绪论
控制理论的发展历程
经典控制理论
形成和发展
在20世纪30-40年代,初步形成。 在20世纪40年代形成体系。 频率理论 根轨迹法
以SISO线性定常系统为研究对象。 以拉氏变换为工具,以传递函数为基础在频率域中分析 与设计。 经典控制理论的局限性
Modern Control Theory
L01
绪论
绪论
关于自动化的介绍 Brief Introduction to Automation
自动化的理论基础
自动化技术是一门新兴的科学技术,它以控制论、信息 论和系统论为理论基础,以哲学的方法论为研究方法。 Cybernetics Information Theory Systemism
Modern Control Theory
L01
绪论
绪论
控制理论的发展历程 Progress of Control Theory
经典控制理论 (Classical Control Theory) 现代控制理论 (Modern Control Theory) 智能控制理论 (Intelligent Control Theory) 控制理论发展趋势 (Trend of Development of Control Theory)
现代控制理论课件(第三版)-刘豹主编-机械工业出版社
Modern Control Theory
L01
绪论
网络交流
为了配合教与学,更好地掌握《现代控制理论》 知识,交流学习经验,交换学习信息,已在网 络上建立了《现代控制理论》社区。社区建在 Yahoo groups 上,社区名称为Modern Control Theory。此社区是针对现代控制理论 课程学习建立的,内容与教与学密切相关。鼓 励所有同学加入该社区。
Modern Control Theory
L01
绪论
教学要求
参加本课程的同学必须
人手一册教材 出勤听课 记课堂笔记 完成作业
(缺课达到1/3,缺作业达1/4者取消正常考试资格。)
Modern Control Theory
现代控制理论
沈阳建筑大学 信息与控制工程学院
L01
绪论
绪论
建议:在Yahoo 上建立帐号 sjzu+校园卡编号,以此账号注册
Modern Control Theory
L01
绪论
网络交流
社区所能提供的:
Lecture notes/slides, Related learning materials, Outline of the general review, Information and news in this course.
Modern Control Theory
L01
绪论
绪论
关于自动化的介绍 Brief Introduction to Automation
自动化的理论基础
自动化技术是一门新兴的科学技术,它以控制论、信息 论和系统论为理论基础,以哲学的方法论为研究方法。 Cybernetics Information Theory Systemism
《现代控制理论》第三版课件_第4章
22
ˆ Cm2
综上所述,对于一个具有不同特征值的控 制系统,系统矩阵A化为对角线矩阵以后,
ˆ 状态完全能观的条件是, 矩阵 C 中列向
量不为零。
λ1 J = 0 0
1 λ1 0
0 1 , λ1
ˆ C11 ˆ = C C ˆ 21 ˆ C 31
ˆ C12 ˆ C 22 ˆ C 32
J = diag{λ1 , λ2 , , λn }
[ p1
p2
λ1 0 pn ] 0
0 λ2 0
0 0 = A [p 1 λn
p2 pn ]
J1 0 J = P −1 AP = 0
0 J2 0
λ j 0 0 0
[
p j 2 p jq
]
( λ j I − A) p j1 = 0
Pj = p j1
[
p j2
p jq
]
( λ j I − A) p j 2 = − p j1 ( λ j I − A) p j 3 = − p j 2 ( λ j I − A) p jq = − p j ( q −1)
对于线性定常系统,能控性和能达性是互逆的。
x = Ax(t ) + Bu (t )
rank B
[
AB A
n −1
B =n
]
线性定常系统能控的充要条件: 其能控性矩阵的秩为n,或者 B AB …… An-1B线性无关。
Gilbert 能控性准则
x = Ax(t ) + bu (t )
λ1 0 V −1 AV = 0
( λ j I − A) p j1 = 0 ( λ j I − A) p j 2 = − p j1 ( λ j I − A) p j 3 = − p j 2
课件-现代控制理论-刘豹第三版-第三章PPT课件

能控性矩阵 M
离散时间系统的状态方程如下: (1)
当系统为单输入系统时,式中
为标量控制作用.控制阵 为 维
列矢量;G为系统矩阵
; 为状态矢量
。
能观性矩阵N 离散时间系统的能观性,是从下述两个方程出发的。
式中, 为 维列矢量;C 为
(2) 输出矩阵,其余同式(6)。
第14页/共50页
根据3.3节中能观性定义,如果知道有限采样周期内的输出 ,就能唯
第16页/共50页
3.5 时变系统的能控性与能观性
能控性判别
1.有关线性时变系统能控性的几点说明
1)定义中的允许控制
,在数学上要求其元在
绝对平方可积的,即
区间是
这个限制条件是为了保证系统状态方程的解存在且唯一。 2)定义中的 ,是系统在允许控制作用下,由初始状态 目标状态(原点)的时刻。
转移到
3)根据能控性定义,可以导出能控状态和控制作用之问的关系式。 4)非奇异变换不改变系统的能控性。
作用, 仅作无控的自由运动。显然,若不考虑
维子系统,便
可得到一个低维的能控系统。
第37页/共50页
至于非奇异变换阵:
(7)
其中 个列矢量可以按如下方法构成,前 个列矢量
是
能控性矩阵M中的 个线性无关的列,另外的
个列
在
确保 为非奇异的条件下,完全是任意的。
第38页/共50页
按能观性分解 设线性定常系统:
这是一个很重要的关系式,下面的几个推论都是由它推证出来的。
3)对系统作线性非奇异变换,不改变其能观测性。
4)如果
是不能观测的, 为任意非零实数,则
也是不能观
测的。
5)如果 和 都是不能观的,则
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
Modern Control Theory
L01
绪论
绪论
控制理论的发展历程
经典控制理论
形成和发展
世纪30-40年代,初步形成。 年代, 在20世纪 世纪 年代 初步形成。 世纪40年代形成体系 在20世纪 年代形成体系。 世纪 年代形成体系。 频率理论 根轨迹法
线性定常系统为研究对象。 以SISO线性定常系统为研究对象。 线性定常系统为研究对象 以拉氏变换为工具, 以拉氏变换为工具,以传递函数为基础在频率域中分析 与设计。 与设计。 经典控制理论的局限性
Modern Control Theory
L01
绪论
绪论
学习现代控制理论的意义
是自动化专业的理论基础 是提高学生专业理论水平的重要环节 是许多专业报考研究生的必考课
Modern Control Theory
L01
绪论
绪论
关于自动化的介绍 Brief Introduction to Automation
沈阳建筑大学 信息与控制工程学院
L01
绪论
绪论
本节主要内容
学习现代控制理论的意义 关于自动化的介绍 控制理论的发展历程 现代控制理论研究的对象、 现代控制理论研究的对象、方法及内容 现代控制理论与经典控制理论的对比
Modern Control Theory
L01
绪论
绪论
学习现代控制理论的意义
科学技术的发展不仅需要迅速地发展控制理论, 科学技术的发展不仅需要迅速地发展控制理论,而 且也给现代控制理论的发展准备了两个重要的条 现代数学和数字计算机。 件—现代数学和数字计算机。 现代数学和数字计算机 现代数学,例如泛函分析、现代代数等, 现代数学,例如泛函分析、现代代数等,为现代控 制理论提供了多种多样的分析工具; 制理论提供了多种多样的分析工具;而数字计算机 为现代控制理论发展提供了应用的平台。 为现代控制理论发展提供了应用的平台。 在二十世纪五十年代末开始, 在二十世纪五十年代末开始,随着计算机的飞速发 推动了核能技术、空间技术的发展, 展,推动了核能技术、空间技术的发展,从而对出 现的多输入多输出系统、非线性系统和时变系统。 现的多输入多输出系统、非线性系统和时变系统。
ModernControlTheory-subscribe@
建议: 建议:在Yahoo 上建立帐号 sjzu+校园卡编号,以此账号注册 校园卡编号, 校园卡编号
Modern Control Theory
L01
绪论
网络交流
社区所能提供的: 社区所能提供的:
Lecture notes/slides, Related learning materials, Outline of the general review, Information and news in this course.
Modern Control Theory
L01
绪论
绪论
现代控制理论与经典控制理论的对比
对象 共同 分析:研究系统的原理和性能 主要内容 设计:改变系统的可靠性(综合性能) 系统
研究对象:单入单出(SIS0)系统,线性定常 古典 工具:传递函数(结构图),已有初始条件为零时才适用 试探法解决问题 : PID串联、超前、滞后、反馈 区别 研究对象:多入多出(MIMO)系统、线性定常、非线性、时变 工具:状态空间法、研究系统内部、输入-状态(内部)-输出 现代 改善系统的方法:状态反馈 、输出反馈
Modern Control Theory
L01
绪论
绪论
关于自动化的介绍 Brief Introduction to Automation
自动化的理论基础
自动化技术是一门新兴的科学技术,它以控制论、 自动化技术是一门新兴的科学技术,它以控制论、信息 论和系统论为理论基础,以哲学的方法论为研究方法。 论和系统论为理论基础,以哲学的方法论为研究方法。
定义
所谓自动化是指机器或装置在无人干预的情况下按规定 的程序或指令自动的进行操作或运行。广义地讲, 的程序或指令自动的进行操作或运行。广义地讲,自动 化还包括模拟或再现人的智能活动。 化还包括模拟或再现人的智能活动。
Definition
The art of making processes or machines self-acting or self-moving. Also pertains to the technique of making a device, machine, process or procedure more fully automatic.
,
Modern Control Theory
L01
绪论
网络交流
为了配合教与学,更好地掌握《现代控制理论》 为了配合教与学,更好地掌握《现代控制理论》 知识,交流学习经验,交换学习信息, 知识,交流学习经验,交换学习信息,已在网 络上建立了《现代控制理论》社区。 络上建立了《现代控制理论》社区。社区建在 Yahoo groups 上,社区名称为 社区名称为Modern Control Theory。此社区是针对现代控制理论 。 课程学习建立的,内容与教与学密切相关。 课程学习建立的,内容与教与学密切相关。鼓 励所有同学加入该社区。 励所有同学加入该社区。
L01
绪论
绪论
控制理论的发展历程
现代控制理论
对象:以 线性、 对象 以MIMO线性、非线性、时变与非时变系统为主要 线性 非线性、 研究对象; 研究对象; 工具:以线性代数和微分方程为工具, 工具:以线性代数和微分方程为工具,以状态空间法为 基础。 基础。
Modern Control Theory
Modern Control Theory
L01
绪论
课程内容
绪论 控制系统的状态空间表达式 控制系统状态空间分析 线性控制系统能控性和能观性 控制系统的稳定性分析 线性定常系统的综合 最优控制
Modern Control Theory
L01
绪论
教材及参考书
教材: 教材
《现代控制理论》(第三版),刘豹主编,机械工 现代控制理论》 第三版),刘豹主编, ),刘豹主编 业出版社
(P.177 About Lyapunov`s stability criteria for nonlinear systems)
Modern Control Theory
L01
绪论
绪论
现代控制理论研究的对象、 现代控制理论研究的对象、内容及方法
现代控制理论研究的内容
线性系统理论 非线性系统理论 最优控制 系统辨识 自适应控制 最优滤波理论等 (Theory of Linear Systems) (Theory of Nonlinear Systems) (Optimal Control) (System Identification) (Adaptive Control) (Optimal filtering Theory)
Modern Control Theory
L01
绪论
绪论
现代控制理论研究的对象、 现代控制理论研究的对象、内容及方法
现代控制理论研究的方法
研究系统输入/输出特性和内部性能 研究系统输入 输出特性和内部性能 (Input/output properties of systems and internal performance)
经典控制理论 (Classical Control Theory) 现代控制理论 (Modern Control Theory) 智能控制理论 (Intelligent Control Theory) 控制理论发展趋势 (Trend of Development of Control Theory)
狭义自动化是指工业自动化, 狭义自动化是指工业自动化,自动化也是最早应用于工 业生产领域的。 业生产领域的。 广义的自动化包括工业自动化、生活自动化、 广义的自动化包括工业自动化、生活自动化、办公自动 化和商务自动化。 化和商务自动化。
Modern Control Theory
L01
绪论
绪论
控制理论的发展历程 Progress of Control Theory
控制理论与计算机技术相结合→计算机控制技术 控制理论与计算机技术相结合 计算机控制技术
Modern Control Theory
L01
绪论
绪论
控制理论的发展历程
控制理论发展趋势
企业:资源共享、因特网、信息集成、信息技术+控制技 企业:资源共享、因特网、信息集成、信息技术 控制技 集成控制技术) 术 (集成控制技术 集成控制技术 网络控制技术 计算机集成制造CIMS:(工厂自动化) :(工厂自动化 计算机集成制造 :(工厂自动化)
Modern Control Theory
L01
绪论
绪论
现代控制理论研究的对象、 现代控制理论研究的对象、内容及方法
现代控制理论研究的对象
线性系统 非线性系统 时变系统 多变量系统 连续与离散系统 (Linear systems) (Nonlinear systems) (Time variable systems) (Multivariable systems) (Continuous/discrete time systems)
Fundamental knowledge of automation
Cybernetics Information Theory Systemism
Modern Control Theory
L01
绪论
绪论
关于自动化的介绍 Brief Introduction to Automation
狭义自动化和广义自动化
参考书: 参考书