并行网格生成技术
fluent 介绍

想起CFD,人们总会想起FLUENT,丰富的物理模型使其应用广泛,从机翼空气流动到熔炉燃烧,从鼓泡塔到玻璃制造,从血液流动到半导体生产,从洁净室到污水处理工厂的设计,另外软件强大的模拟能力还扩展了在旋转机械,气动噪声,内燃机和多相流系统等领域的应用。
今天,全球数以千计的公司得益于FLUENT的这一工程设计与分析软件,它在多物理场方面的模拟能力使其应用范围非常广泛,是目前功能最全的CFD软件。
FLUENT因其用户界面友好,算法健壮,新用户容易上手等优点一直在用户中有着良好的口碑。
长期以来,功能强大的模块,易用性和专业的技术支持所有这些因素使得FLUENT成为企业选择CF D软件时的首选。
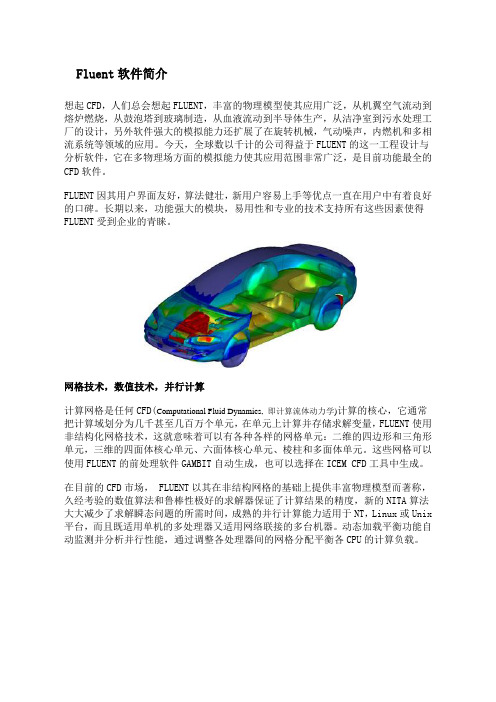
网格技术,数值技术,并行计算计算网格是任何CFD计算的核心,它通常把计算域划分为几千甚至几百万个单元,在单元上计算并存储求解变量,FLUENT使用非结构化网格技术,这就意味着可以有各种各样的网格单元:二维的四边形和三角形单元,三维的四面体核心单元、六面体核心单元、棱柱和多面体单元。
这些网格可以使用FLUENT的前处理软件GAMBIT自动生成,也可以选择在ICEM CFD工具中生成。
六面体核心网格四边形平铺网格在目前的CFD市场, FLUENT以其在非结构网格的基础上提供丰富物理模型而著称,久经考验的数值算法和鲁棒性极好的求解器保证了计算结果的精度,新的NITA算法大大减少了求解瞬态问题的所需时间,成熟的并行计算能力适用于NT,Linux或Unix平台,而且既适用单机的多处理器又适用网络联接的多台机器。
动态加载平衡功能自动监测并分析并行性能,通过调整各处理器间的网格分配平衡各CPU的计算负载。
并行速度的比较湍流和噪声模型FLUENT的湍流模型一直处于商业CFD软件的前沿,它提供的丰富的湍流模型中有经常使用到的湍流模型、针对强旋流和各相异性流的雷诺应力模型等,随着计算机能力的显著提高,FLUENT已经将大涡模拟(LES)纳入其标准模块,并且开发了更加高效的分离涡模型(DES),FLUENT提供的壁面函数和加强壁面处理的方法可以很好地处理壁面附近的流动问题。
CFD并行计算技术的研究进展
2007年第26卷增刊化l:进展CHEMlCALINDUSTRYANDENGINEERfNGPROGRESS。
l5‘CFD并行计算技术的研究进展吴明一1.王红星2.秦玉波2,李鑫钢1,一,徐世民1’2(1天津人学化T学院,天津300072:2天津人学精馏技术国家丁程研究中心,灭津300072)摘要:综述了并行计算技术在计算流体动力学(CFD)中的研究及应用进展,介绍了CFD并行化的关键技术研究近况,包括网格处理技术、并行化算法技术以及并行计算平台的研究进展.最后讨论了CFD并行技术的发展方向。
关键词:cFD;并行计算ResearchprogressofCFDparaIlelcomputingWUMingyi\.wANGHon晷xin营.QINYttb孑。
LIxinga’t毒。
,xUShimi矗3(。
SchoolofChemicaIEngineeringandT色chnology,TianIjinUnivers时,Tianjin300072,China:2NationalEngineeringResearchCenterforDiStillationTechnology・Ti州inUniVersity,Ti柚jin300072,China)Absn翟ct:Researcha11d印plicationofCFDonparallelccHn口puterSarereViewed,andthekeytechn0109y,suchas伊idmanagement,parallelprocessingmethod粕dparalleIcomputingplatfomareintroduced.ThedeveIopmentofCFDparallelcomputingisaIsodiscuSsed.Keywords:CFD:p啪llelcomputing计算流体力学(CFD,Computationalfluiddynamics)是指利用数值方法通过计算机求解描述流体运动的数学方程,揭示流体运动的物理规律,研究定常流体运动的空间物理特征和非定常流体运动的时一空物理特征的学科。
fluent软件介绍
Fluent软件简介想起CFD,人们总会想起FLUENT,丰富的物理模型使其应用广泛,从机翼空气流动到熔炉燃烧,从鼓泡塔到玻璃制造,从血液流动到半导体生产,从洁净室到污水处理工厂的设计,另外软件强大的模拟能力还扩展了在旋转机械,气动噪声,内燃机和多相流系统等领域的应用。
今天,全球数以千计的公司得益于FLUENT的这一工程设计与分析软件,它在多物理场方面的模拟能力使其应用范围非常广泛,是目前功能最全的CFD软件。
FLUENT因其用户界面友好,算法健壮,新用户容易上手等优点一直在用户中有着良好的口碑。
长期以来,功能强大的模块,易用性和专业的技术支持所有这些因素使得FLUENT受到企业的青睐。
网格技术,数值技术,并行计算计算网格是任何CFD(Computational Fluid Dynamics, 即计算流体动力学)计算的核心,它通常把计算域划分为几千甚至几百万个单元,在单元上计算并存储求解变量,FLUENT使用非结构化网格技术,这就意味着可以有各种各样的网格单元:二维的四边形和三角形单元,三维的四面体核心单元、六面体核心单元、棱柱和多面体单元。
这些网格可以使用FLUENT的前处理软件GAMBIT自动生成,也可以选择在ICEM CFD工具中生成。
在目前的CFD市场, FLUENT以其在非结构网格的基础上提供丰富物理模型而著称,久经考验的数值算法和鲁棒性极好的求解器保证了计算结果的精度,新的NITA算法大大减少了求解瞬态问题的所需时间,成熟的并行计算能力适用于NT,Linux或Unix 平台,而且既适用单机的多处理器又适用网络联接的多台机器。
动态加载平衡功能自动监测并分析并行性能,通过调整各处理器间的网格分配平衡各CPU的计算负载。
湍流和噪声模型FLUENT的湍流模型一直处于商业CFD软件的前沿,它提供的丰富的湍流模型中有经常使用到的湍流模型、针对强旋流和各相异性流的雷诺应力模型等,随着计算机能力的显著提高,FLUENT已经将大涡模拟(LES)纳入其标准模块,并且开发了更加高效的分离涡模型(DES),FLUENT提供的壁面函数和加强壁面处理的方法可以很好地处理壁面附近的流动问题。
基于区域分解技术的并行四面体网格生成算法
Pa r a l l e l t e t r a h e d r a l me s h g e n e r a t i o n a l g o r i t h m b a s e d o n d o ma i n d e c o mp o s i t i o n
XU Qu a n ,CUI Ta o 。 ,LI U Qi n g - k a i ,CAO Xi a o — l i n
2 0 1 4年 1月
计 算机 工程 与设计
C OM PUTER ENGI NEERI NG AND DES I GN
J a n .2 0 1 4
Vo 1 . 3 5 No . 1
第3 5卷
第 1期
基 于 区域 分 解 技 术 的 并 行 四面体 网格 生成 算 法
徐 权 , 崔 涛 ,刘青凯 ,曹小林
法相 比 , 不仅 大 大 降 低 了 网格 生成 的 时 间 , 同 时保 证 了子 区域之 间 交 界 面 上 网格 的 一 致 性 和 协 调 性 , 生成 了 高质 量 的 四 面
体 网格 。
关键 词 :网格 生成 ;约束 D e l a u n a y三角化 ;并行 四面体 网格 生成 ;区域 分解 ;并行算 法 中图法分 类号 :TP 3 1 1 . 1 文献标识号 :A 文章编号 :1 0 0 0 — 7 0 2 4( 2 0 1 4 )0 1 — 0 1 5 3 — 0 5
Ab s t r a c t : A p a r a l l e l t e t r a h e d r a l me s h g e n e r a t i o n me t h o d b a s e d o n d o ma i n d e c o mp o s i t i o n i s p r e s e n t e d .I t c a n b e a p p l i e d f o r t h e 3 一 d i me n s i o n c o mp l e x g e o me t r i e s .B a s e d o n t h e d i v i d e a n d c o n q u e r p r i n c i p l e ,t h e 3 D c o mp u t a t i o n a l d o ma i n i s d i v i d e d i n t o ma n y s u b - d o ma i n s ,wh i c h a r e d i s t r i b u t e d i n t o e a c h p r o c e s s o r .Fi n a l l y ,f o r s u b - d o ma i n s ,c o n s t r a i n e d De l a u n a y t r i a n g u l a t i o n a n d i t e r a t i v e t e c h n o l o g y a r e u s e d t o c o n s t r u c t t e t r a h e d r a l me s h e s s i mu l t a n e o u s l y .Th e n u me r i c a l e x p e r i me n t s s h o w t h i s a l g o r i t h m i s s c a l a b l e a n d s t a b l e ,a n d i t c a n g u a r a n t e e t h e c o n s i s t e n c y o f t h e me s h e s o n t h e i n t e r f a c e a n d c a n g e n e r a t e h i g h q u a l i t y t e t r a h e d r a l me s h e s a t
ICEM入门教程
ICEM入门教程ICEM是一种用于三维几何建模和网格生成的软件工具,被广泛应用于流体力学和结构分析等领域。
本教程将介绍ICEM的基础知识和操作技巧,帮助读者快速入门。
一、ICEM的界面和基本操作1.启动ICEM后,会显示出主界面。
主界面由菜单栏、工具栏、工具箱和3D图形窗口组成。
2.菜单栏包含了所有的命令选项,工具栏提供了一些常用命令的快捷方式,工具箱包含了各种网格生成工具。
1.可以通过菜单栏的“文件-导入”命令将几何模型导入到ICEM中。
支持的导入格式包括STL、STEP和IGES等。
3.使用选择工具可以选择几何体的边、面和体。
选择后,可以进行操作,如移动、旋转、缩放或删除。
三、网格生成的基本步骤1.网格生成的第一步是创建一个空的网格。
可以通过菜单栏的“几何-新建”命令创建一个新的几何体。
2.创建几何体后,可以使用绘图工具创建网格。
在创建网格之前,可以设置网格的边界条件和约束条件。
3.使用边界条件工具可以定义网格的边界条件,如壁面、进口和出口等。
约束条件工具可以定义网格的约束条件,如网格密度和网格尺寸等。
4.在设置完边界条件和约束条件后,可以使用生成工具生成网格。
生成工具会根据边界条件和约束条件自动生成网格。
5.生成网格后,可以使用检查工具检查网格的质量。
质量低的网格可能会影响数值计算的准确性,需要进行调整或修复。
6.调整或修复网格后,可以输出网格文件。
输出格式可以是CGNS、FLUENT或ANSYS等。
四、ICEM的进阶技巧2.使用网格生成辅助工具可以更高效地生成网格,如等间距法、背景网格法和缝合法等。
3.使用ICEM提供的优化工具可以优化网格的质量和结构,以提高数值计算的准确性和效率。
4.在处理大型模型时,可以使用ICEM的并行处理功能,以提高处理速度和效率。
5.学习和掌握ICEM的宏命令和脚本语言可以自动化网格生成过程,提高工作效率。
五、常见问题解决方法1.如果导入的几何模型存在错误,可以使用修复工具进行修复。
并行重叠/变形混合网格生成技术及其应用

第4卷㊀第6期2019年11月气体物理PHYSICSOFGASESVol.4㊀No.6Nov.2019收稿日期 2019⁃06⁃04 修回日期 2019⁃08⁃21基金项目 国家重点研发计划(2016YFB0200701) 国家自然科学基金(11532016 11672324)第一作者简介 常兴华(1982⁃)㊀男 博士 副研究员 主要研究方向为动态混合网格生成技术㊁非定常数值计算方法㊁数值虚拟飞行.E⁃mail cxh_cardc@126.com通信作者简介 张来平(1968⁃)㊀男 博导 研究员 研究方向为非结构网格生成方法㊁非结构网格高精度数值模拟方法㊁数值虚拟飞行.E⁃mail zhanglp_cardc@126.com㊀㊀DOI 10.19527/j.cnki.2096⁃1642.0760并行重叠/变形混合网格生成技术及其应用常兴华1 2 ㊀王年华1 2 ㊀马㊀戎2 ㊀田润雨3 ㊀张来平1 2(1.中国空气动力研究与发展中心空气动力学国家重点实验室 四川绵阳621000 2.中国空气动力研究与发展中心计算空气动力研究所 四川绵阳6210003.中国空气动力研究与发展中心超高速空气动力研究所 四川绵阳621000)DynamicHybridMeshGeneratorCoupledwithOversetandDeformationinParallelEnvironmentCHANGXing⁃hua1 2 ㊀WANGNian⁃hua1 2 ㊀MARong2 ㊀TIANRun⁃yu3 ZHANGLai⁃ping1 2(1.StateKeyLaboratoryofAerodynamics ChinaAerodynamicsResearchandDevelopmentCenter Mianyang621000 China 2.ComputationalAerodynamicsInstitute ChinaAerodynamicsResearchandDevelopmentCenter Mianyang621000 China 3.HypervelocityAerodynamicsInstitute ChinaAerodynamicsResearchandDevelopmentCenter Mianyang621000 China)摘㊀要 为了适用于柔性变形㊁相对运动等复杂动边界问题 建立了并行环境下重叠和变形相结合的动态混合网格生成技术.通过计算区域分解以及分布式并行实现了重叠和变形技术的结合 其中重叠网格采用了并行化的隐式装配方法 并发展了两种并行化查询策略.变形网格则采用了并行化的径向基函数(RBF)插值方法.并行化动态网格生成方法大幅提高了动态网格生成效率 有利于处理大规模的动边界问题.在此基础上 发展了基于变形/重叠动态混合网格的流动/运动/控制一体化数值模拟方法 进一步改进了耦合模拟软件平台 HyperFLOW.典型应用算例证明了该动态混合网格技术及一体化算法的实用性.关键词 重叠网格 变形网格 并行动态网格生成 数值虚拟飞行 耦合算法㊀㊀㊀中图分类号 V211.3文献标识码 AAbstract Adeforming/oversetcoupledhybridmovinggridgenerationmethodwasdevelopedinparallelenvironmenttodealwithcomplexengineeringproblemsofbothboundarydeformationandrelativemovement.Thecoupledmethodisbasedonadomaindecompositionstrategyanddistributedparallelprocess.Theparallelimplicit⁃hole⁃cuttingmethodbasedontheminimumdistancetowallisadopted andtwoparalleldonorcellsearchingmethodshavebeendeveloped.Theinterpolationmethodbasedonparallelradialbasisfunction(RBF)isadoptedformeshdeformation.Basedonthecoupledhybridmovinggrids thenumericalvirtualflightsolver HyperFLOW wasimproved.ThecoupledsimulationsystemintegratestheparallelunsteadyRANSsolveronthedeforming/oversetmovinggrids sixdegreesoffreedom(6DOF)motionsolver andflightcontrolsystem.Sometypicalapplicationsdemonstratethecapabilityofpresentmethod.Keywords oversetmesh deformingmesh parallelmovinggridgeneration numericalvirtualflight couplingmethod引㊀言在计算流体力学应用中经常会遇到包含运动边界的流动问题 例如复杂多体分离㊁飞行器机动飞行㊁直升机旋翼运动㊁风力机叶片旋转㊁鸟类/昆虫/鱼类等生物体柔性运动等.针对此类问题开展数值模拟 首先需要解决运动边界条件下的动态网第6期常兴华等并行重叠/变形混合网格生成技术及其应用格生成问题.此外由于此类包含运动边界的流动问题往往是一个多学科耦合问题因此还要发展和动态网格技术相匹配的非定常流动数值模拟方法以及多学科耦合求解算法以满足工程应用的需求.常见的处理运动边界问题的方法有动态重叠网格技术[1]㊁变形网格技术[2]以及内置边界方法[3]等.重叠网格是由若干个子网格块组合形成覆盖整个计算域的网格子网格块之间通过网格装配技术建立插值关系.通过子网格块的刚性运动可以非常方便地模拟大位移㊁相对运动等问题.变形网格技术通过将边界网格的运动传递到内部网格点以生成每个时刻的动态网格其优点是可以保持网格拓扑结构的一致性且适用于柔性边界问题.内置边界方法通过在控制方程中引入模拟物理边界影响的源项降低了网格生成难度且物体运动过程中不需要对网格进行特殊处理但是其在模拟高Reynolds数可压缩流问题时精度仍有待提高.随着CFD所模拟的工程问题越来越复杂多学科耦合㊁精细化数值模拟等都对数值计算方法尤其是网格生成技术提出了更高要求.为了更好地解决柔性变形㊁相对运动㊁大位移运动相互耦合的复杂工程问题重叠网格技术和变形网格技术的结合是一种较好的技术途径.此外为了满足工程应用对精细化数值模拟的要求往往需要采用较大规模的计算网格而串行的重叠网格装配技术以及变形网格技术显然难以满足工程应用对计算效率的要求需要发展并行化的动网格生成技术.针对以上问题作者发展了一种并行环境下重叠和变形耦合的动态混合网格技术该技术采用了基于网格分区的分布式并行方案每一个网格分区根据其所依赖的物理边界运动信息进行变形然后通过并行化重叠网格隐式装配技术进行挖洞和宿主单元查找.其中网格变形采用了基于径向基函数(radialbasisfunction RBF)的插值方法为提高网格变形效率采取了并行化的参考点选择算法以及插值算法.在该动态混合网格技术的基础上发展了流动/运动/控制一体化数值模拟方法进一步改进了作者课题组之前发展的具有完全自主知识产权的多学科耦合数值模拟平台 HyperFLOW.本文将对这些工作进行简要介绍并展示一些典型的应用算例.1㊀动态混合网格生成技术1.1㊀并行环境下重叠/变形网格技术的整体思路一般而言物体的复杂运动可以分解为体轴系内的柔性变形和整体的刚性运动.对于某些附着在其他物体上的部件(如飞行器的尾舵) 除了自身的运动之外还要随着飞行器进行牵连运动因此可采用3组6自由度参数定义其刚性运动即部件自身的自由度部件所附着的物体的自由度部件在其所附着的物体中安装的自由度.图1给出了物体刚性运动定义的示意图其中x0/y0/z0为惯性坐标系(简称C0) x1/y1/z1为飞行器质心坐标系(简称C1) x2/y2/z2为尾舵安装位置的坐标系(简称C2) 则尾舵的运动由其旋转角度㊁C2相对于C1的6自由度参数㊁C1相对于C0的6自由度参数共同决定.分别采用网格变形技术和动态重叠网格技术处理物体的柔性及刚性运动.首先在生成计算网格时需要围绕每一个物体或者部件生成独立的贴体子网格块并采用重叠网格技术将各个子网格块进行组装.子网格块可以采用三棱柱㊁四面体㊁金字塔㊁六边形等多种形式的混合单元(二维情况下为三角形㊁四边形㊁多面体等单元) 当物体发生变形和刚性运动之后首先每个子网格块根据其所依赖的物面点的运动信息在其体轴系内实现内部网格点的变形变形之后的子网格块再跟随物体进行刚性运动随后采用重叠网格技术将各个子网格块进行重新组装.图1㊀坐标系以及物体刚体运动的定义Fig.1㊀Definitionofthereferenceframeandtherigidmovementofbody动态混合网格生成流程如图2所示整个过程均在并行环境下进行采用了基于网格分区的分布式并行策略.在读入初始计算网格之后分别对围绕每个物体的子网格块进行分区并均匀分布至各31气体物理2019年㊀第4卷个进程同时提取其中各个物体或部件的物面网格信息并发送至所有进程.该全局的物面网格信息有两个用途(1)跟随物体进行变形(2)计算空间网格点或单元的最近壁面距离.动态网格生成过程中每个进程仅对其所负责的若干网格分区进行变形和刚性运动的计算且采用相同的物面网格以及物面参考点以保证网格分区边界的匹配.隐式重叠网格装配过程中需要通过各个进程之间的通讯来确定查询以及逻辑判断结果.算法的具体实现过程中如何建立耦合动态混合网格生成的整体程序框架如何保证各个功能模块的封装性㊁可扩展性是一个非常重要的内容.本文采用了C++面向对象的思想开发计算程序网格数据㊁流场数据是程序的核心依据这些数据结构建立MPI底层支撑环境并围绕这些数据㊁底层支撑环境开发具有高度封装性的功能模块从而保证各个模块的可扩展㊁可移植特性也提高了代码的容错能力并降低了维护成本.图3给出了程序的架构示意图各个功能模块之间须根据多学科耦合顶层计算流程的需要建立必要的信息传递接口.图2㊀动态混合网格生成的整体思路Fig.2㊀Sketchmapforthedynamicmeshgenerator图3㊀程序框架示意图Fig.3㊀Frameworkofthesoftwareplatform1.2 重叠网格装配技术重叠网格技术包括挖洞㊁宿主单元搜索以及流场插值3个方面的内容其中挖洞和宿主单元搜索称为重叠网格装配.根据挖洞过程的不同可以分为显式装配[6⁃9]和隐式装配[10⁃15]两类.显式装配过程首先要将落在物体内部的点或单元进行标记形成初始洞边界(判断点是否在物体内部的方法有矢量判别法[4]㊁射线求交法[5]㊁洞映射方法[6]㊁目标x射线法[7]等.) 然后通过一些优化算法将洞边界进行优化(例如割补法[8⁃9])并确定出插值单元最后查找插值单元的宿主单元.隐式装配技术须查找所有点或者单元的宿主单元通过对比单元的质量确定其属性挖洞过程则隐含在查询与判断的过程之中.Lee等[10]在2003提出了隐式装配的概念并将单元的尺度作为是否是活跃单元的判则.其实早在1999年Nakahashi等[11]针对非结构重叠网格的方法中就已经采用了隐式装配技术其采用节点的最近壁面距离作为活跃点的判则.Togashi等[12]进一步将基于最近壁面距离的该方法推广应用于复杂多体分离问题的数值模拟.Loehner等[13]Luo等[14]采用单元的尺度和壁面距离的组合量作为单元属性的判断标准使插值单元和贡献单元的大小匹配有助于提高插值稳定性并减少插值误差.非结构重叠网格隐式装配软件PUNDIT[15]亦采用了隐式装配技术.本文的基于网格分区的并行化装配技术分为两步执行.Step1 通过隐式装配技术划分点的属性Step2 判断插值单元并搜索其宿主单元.Step1中需要搜索所有网格点的宿主单元可以采用两种并行查询策略策略1 整体⁃局部 查询搜集所有分区内的网格点形成整体的网格点集并发送至所有进程然后在每个分区内搜索点集的宿主单元并通过MPI规约操作确定最终的查询结果策略2 辅助网格查询围绕各个物体或部件生成稀疏的辅助网格分别在各套辅助网格内进行宿主单元搜索并通过插值得到网格分区中计算网格点的质量(以最小壁面距离作为质量判则).在点属性划分过程中还采取了一种并行化的阵面推进技术能够快速高效地确定出联通的活跃区域.Step2的搜索过程采用与Step1中策略1类似的方式首先搜集每个网格分区内的插值单元以形41第6期常兴华等并行重叠/变形混合网格生成技术及其应用成整体的插值单元集合然后在各个网格分区内进行宿主单元查找.对于多套网格相互嵌套的问题可能存在多个宿主单元此时需要根据宿主单元的属性以及其最小壁面距离确定唯一的一个.本文将查找的宿主单元分为3个等级第1等级的为活跃单元标记为1 第2等级宿主单元为插值单元标记为⁃1 第3等级的宿主单元为非活跃单元标记为⁃2.优先选择等级较高的宿主单元如果存在多个等级相同的则进一步比较其最小壁面距离选择距离较小的作为最终结果.并行环境下通过如下的MPI通讯流程实现进程之间的逻辑判断(1)通过MPI全局规约命令确定宿主单元的最高等级(2)各个进程内如果宿主单元等级小于最高等级舍去该宿主单元(3)通过MPI全局规约命令确定宿主单元的最小壁面距离(4)各个进程内如果宿主单元的最小壁面距离大于该值则舍去该宿主单元(5)将剩下的唯一的宿主单元广播至所有进程.方法的具体细节请参见文献[16⁃17].1.3 并行化网格变形技术常见的网格变形方法有超限插值(transfiniteinterpolation TFI)方法[2]㊁弹簧松弛法[18⁃19]㊁Delaunay背景网格映射法[20]㊁RBF插值法[21⁃22]等这些方法各具特色并都已经得到广泛应用.在之前的研究工作中作者所在的研究团队发展了弹簧松弛法和Delaunay背景网格映射相结合的网格变形方法[23⁃25]并结合了局部网格重构技术从而可以模拟大变形㊁大位移等问题在多体相对运动问题中也得到了大量应用.在这些工作的基础上本文进一步集成了并行化RBF插值方法.当物面网格量较大时RBF方法中的插值矩阵会变得十分庞大导致空间网格点的插值计算量急剧增加.为了提高RBF插值效率参照文献[22]的做法选用有限的物面点作为参考点从而可以减少矩阵的规模提高空间网格点的插值效率.由于RBF插值过程不需要网格的拓扑关系因此其并行计算比较容易实现.其包括两部分的并行(1)物面点选择过程的并行(2)插值过程的并行.物面参考点的选择采用贪婪算法以物面点位移的误差作为准则.首先需要将物面点集平均分配到各个进程.在循环判断的过程中每个进程只对其所负责的物面点进行插值运算和比较并求出其中的最大误差点然后通过MPI通讯确定出所有进程中的误差最大点并加入参考点集主进程根据新的参考点集执行插值矩阵的更新以及求逆操作并将其广播至其他所有进程算法的具体流程如图4所示.空间点的插值直接基于网格分区进行每个进程只针对其所负责的网格分区进行插值运算每一个进程中存储相同的插值矩阵这样可以保证分区边界上点的匹配.图4㊀RBF变形网格法中并行化物面参考点选择方法Fig.4㊀ReferencenodeselectingmethodinparallelenvironmentforRBFmovinggridgeneration图5及表1给出了并行化RBF方法的测试算例.模型为简化的三维金枪鱼外形采用了三棱柱㊁四面体形式的混合网格其中物面网格点数9.8ˑ104空间网格单元数7.19ˑ106.采用单进程选择600个物面参考点耗时约16.2s 空间网格变形耗时约30.2s.采用64进程并行物面参考点选择耗时约6.0s 空间网格变形耗时约1.5s.并行效率较低的原因在于物面参考点选择阶段矩阵求逆过程没有并行化空间点位移插值阶段插值系数的计算过程没有并行化.这两部分计算均由主进程负责然后将计算结果发送给其他进程.51气体物理2019年㊀第4卷(a)Surfacemeshesandreferencenodes(rednodes)(b)Averagederrorandmaximumerrorofsurfacenodeswiththenumberofreferencenodes图5㊀物面参考点选择测试算例Fig.5㊀Testcaseforreferencenodeselection表1㊀并行RBF插值效率测试Table1㊀TestforparallelRBFmethodnumberofprocessorsreferencenodesselectionvolumenodesinterpolation116.2s30.2s646.0s1.5s1.4㊀动态混合网格生成实例本节展示了采用上述动态混合网格生成技术得到的一些典型应用实例.图6所示为三维情况下4条鱼群游过程的动态混合网格 网格单元由四面体㊁三棱柱㊁金字塔等组成 总数为1.05ˑ107.物面为三角形网格 网格点数8ˑ104 选取其中1200个作为RBF参考点.采用64进程并行 参考点选择耗时约4.7s 执行一次空间网格变形耗时约3.2s 重叠网格装配耗时约10s.图7所示为飞机外挂物投放过程的重叠网格 载机网格单元数2.5ˑ107 两个外挂物网格单元数约1.2ˑ107.采用256进程并行执行重叠网格装配耗时约7s.图中给出了分离过程中3个典型时刻的空间网格切面.图8给出了机翼外挂物分离的超大规模重叠网格 网格单元总数为2.88ˑ109 采用了12288进程并行计算.此算例采用了并行化的辅助网格查询技术 结合分布式并行计算 因此每个进程占用内存较少.图6㊀三维情况下鱼群游动过程的动态混合网格Fig.6㊀Dynamicmeshesfortheschoolingoffourfishesin3Dcase图7㊀战斗机分离投放过程的动态混合网格Fig.7㊀Dynamicmeshesduringtheseparationprocessbetweentwomissilesandaircraft61第6期常兴华 等 并行重叠/变形混合网格生成技术及其应用图8㊀超大规模重叠网格装配测试Fig.8㊀Hole⁃cuttingforlargescaleoversetmesh2㊀流动/运动/控制一体化数值计算方法针对飞行器机动飞行㊁生物体自主运动等流动㊁运动和控制等多学科耦合问题 作者课题组已经发展了流动/运动/控制耦合的一体化数值方法 并研发了虚拟飞行模拟平台 Hyper⁃FLOW[26⁃28].本文将上述重叠/变形动态混合网格生成技术进一步集成于HyperFLOW平台之中 使之能够适应于同时存在柔性变形和相对运动的复杂动边界问题.HyperFLOW平台[26⁃28]耦合了非定常RANS方程求解㊁刚体动力学求解和飞行控制律等多学科计算模块 并有机集成了动态混合网格生成模块 在统一的理论框架下建立了流动/运动/控制耦合的一体化数值模拟算法.在运动网格上进行非定常RANS方程计算 离散后的方程中含有网格几何量对时间的导数项 为避免由于网格运动引入的额外误差 几何守恒律(geometricconservationlaw GCL)应该和质量守恒㊁动量守恒㊁能量守恒一样在 数值 上得到满足.目前满足几何守恒律的算法很多 作者通过理论分析将其归纳为两类[29] 第1类方法通过在控制方程中引入源项 从而在整体上消除几何守恒误差.第2类方法通过限制面元的速度㊁法向㊁面积等求解方法 以满足面元扫过体积的守恒.通过截断误差分析以及数值测试 我们对各种满足几何守恒律的算法进行了分析[29].结果表明 第1类格式在整体上消除了几何守恒律误差 虽然能够保持均匀流的守恒 但是在非均匀流情况下添加的源项不能够和几何守恒律误差相互抵消 会残留一部分误差 而这部分误差可能会影响数值计算的精度 第2类格式在理论上更为严格 能够保证每个面元上体积通量的守恒 因此对于均匀流或者非均匀流都能够严格满足几何守恒律.详细内容请参见文献[29].根据耦合计算策略的不同 耦合计算方法一般可分为全耦合㊁松耦合和紧耦合3种.全耦合即将各个学科的控制方程视为一个统一㊁完整的系统进行求解.由于流动控制方程㊁运动/动力学方程等在性质上存在较大差异 因此全耦合格式比较难以实现.这里采用解耦方法进行耦合问题的求解 为了解决不同耦合程度的气动/运动耦合问题 我们建立了统一的框架 可通过参数选取实现不同时间精度的松耦合和紧耦合计算[30].我们选用圆柱自激震荡算例对松耦合㊁紧耦合算法进行了考核 与文献结果进行了对比 并对紧耦合㊁松耦合的适用范围进行了测试.结果表明 当物体密度远大于周围流体密度时 采用松耦合或者紧耦合均能够得到较好的计算结果 但是当物体密度接近或者小于周围流体密度时 采用松耦合的方式将难以得到收敛的计算结果 此时采用紧耦合算法是比较合适的选择.最后我们通过一维稳定性分析对该结论进行了验证[30].在此基础上 进一步耦合了飞行控制律 实现了 气动/运动/控制 的一体化数值模拟.在本文中 我们进一步将基于动态重叠网格的非定常RANS方程求解方法集成于HyperFLOW平台.其中涉及到第1节中介绍的重叠网格并行隐式装配 以及重叠区的物理量插值.我们将重叠边界视为一种特殊的网格块间交界面信息 从而很容易在并行分区环境下 实现重叠区的信息交换.关于重叠插值算法 我们目前仍采用普遍采用的双线性(2D)或三线性(3D)插值方法.具体的实现过程这里不再详述.3㊀一体化算法应用实例本节给出几个一体化算法的应用实例.第1个算例为战斗机纵向机动开环控制过程的模拟.通过给定水平尾舵的舵偏规律 战斗机在71面附近采用各向异性三棱柱网格 而远场采用各向同性的四面体网格.机身网格随体运动 水平尾舵根据控制律进行偏转 通过动态重叠与机身网格进行信息交换.图9所示为其纵向机动过程中的典型数值模拟结果(压力云图以及空间的Q等值面).图10所示为一体化算法在生物外流流体力学方面的典型应用.首先 模拟了二维情况下 在未考虑控制时4条鱼的自主群游起动过程(见图10(a)).4条鱼排成菱形阵形从静止流场中加速游动.鱼体的尾涡之间发生了非常剧烈的相互干扰 其中后鱼的游速大于前鱼 说明其受到了有益的流向干扰.其次 我们耦合简单的PID控制律 对二维情况下单个鱼体的转向过程进行了模拟(见图10(b)).数值模拟结果表明 建立的控制律能够较好地实现控制目标 鱼顺利完成了连续转弯及方向控制.最后 我们对三维鱼体自主游动的加速过程进行了模拟.图10(c)所示为鱼加速起动过程中的流场结构 达到更好的加速效果.需要指出的是 果 之中.因此 流场 关于机动过程中气动(水动)的演化㊁闭环控制效果的评估等 工作中陆续发表.=1.98ˑ107 t=Re=1.98ˑ107 t=Re=1.98ˑ107 t=0.4620s δ=15.00ʎQ⁃等值面)resultsforthepitchingmotionofanaircraftpressurecontourandQ⁃isosurface)(a)Fourfishschoolingwithoutcontrol(2D contourofvorticity)图10㊀一体化算法在生物外流流体力学方面的应用Fig.10㊀ApplicationsofHyperFLOWforbio⁃fluidsimulations4 结论本文介绍了作者在重叠/变形耦合动态混合网格生成技术及流动/运动/控制耦合一体化算法方面的研究工作.我们利用面向对象模块化软件设计方法初步建立了适用于复杂动边界问题的一体化数值模拟软件平台.典型飞行器俯仰机动过程和鱼体自主游动的数值模拟结果表明我们发展的动态混合网格生成技术及一体化数值模拟平台对于复杂动边界问题具有良好的适应性展现了广阔的应用前景.下一步工作中需要在如下几个方面加强研究(1)自适应网格技术的集成.通过自适应网格和重叠㊁变形网格技术的结合能够进一步提高数值模拟过程的自动化程度和数值模拟效果(2)DES数值模拟技术的研究与集成主要目的是为了提高飞行器在大迎角情况下复杂分离流动的数值模拟精度(3)多学科耦合模拟软件架构深化研究.我们将采用基于事件驱动的设计思路进一步增强软件的模块化㊁封装性和可扩展性.通过底层网格数据㊁流场数据的集中管理实现各种数值格式在空间上气体物理2019年㊀第4卷的混合运算以进一步提高数值模拟效果(4)结构动力学模块研制与集成.在飞行器机动飞行过程中结构载荷更大有可能导致结构的大变形进而导致气动力的巨大变化.为了准确模拟机动飞行过程必须考虑结构变形带来的影响.致谢㊀感谢国家重点研发计划(2016YFB0200701)以及国家自然科学基金(11532016 11672324)对本文工作的支持.参考文献(References)[1]㊀StegerJL DoughertyFC BenekJA.Achimeragridscheme[C].PresentedatAppliedMechanics Bioengi⁃neering andFluidsEngineeringConference June20⁃22 1983 Houston AmericanSocietyofMechanicalEn⁃gineers.[2]NakamichiJ.CalculationsofunsteadyNavier⁃Stokese⁃quationsaroundanoscillating3Dwingusingmovinggridsystem[R].AIAA1987⁃1158 1987.[3]KimD ChoiH.Immersedboundarymethodforflowa⁃roundanarbitrarilymovingbody[J].JournalofComputa⁃tionalPhysics 2006 212(2) 662⁃680.[4]BenekJA StegerJL DoughertyFA.AflexiblegridembeddingtechniquewithapplicationtotheEulerequa⁃tions[R].AIAA1983⁃1944 1983.[5]LaBozzettaWF GatzkeTD EllisonS etal.MACGS⁃towardsthecompletegridgenerationsystem[R].AIAA1994⁃1923 1994.[6]ChiuIT MeakinR.Onautomatingdomainconnectivityforoversetgrids[R].AIAA1995⁃0854 1995.[7]MeakinRL.ObjectX⁃raysforcuttingholesincompositeoversetstructuredgrid[R].AIAA2001⁃2537 2001.[8]ChoKW KwonJH LeeS.Developmentofafullysys⁃temizedchimeramethodologyforsteady/unsteadyproblems[J].JournalofAircraft 1999 36(6) 973⁃980.[9]李亭鹤阎超李跃军.重叠网格技术中割补法的研究与改进[J].北京航空航天大学学报2005 31(4)402⁃406.LiTH YanC LiYJ.Investigationandenhancementofcut⁃pastealgorithminoverlappinggrid[J].JournalofBeijingUniversityofAeronauticsandAstronautics2005 31(4) 402⁃406(inChinese).[10]LeeYL BaederJD.Implicitholecutting-anewap⁃proachtooversetgridconnectivity[R].AIAA2003⁃4128 2003.[11]NakahashiK TogashiF SharovD.Anintergrid⁃boundarydefinitionmethodforoversetunstructuredgridapproach[R].AIAA1999⁃3304 1999.[12]TogashiF ItoY NakahashiK etal.Oversetunstruc⁃turedgridsmethodforviscousflowcomputations[J].AIAAJournal 2006 44(7) 1617⁃1623.[13]LoehnerR SharovD LuoH etal.Overlappingun⁃structuredgrids[R].AIAA2001⁃0439 2001.[14]LuoH SharovD BaumJ etal.Anoverlappingunstruc⁃turedgridmethodforviscousflows[R].AIAA2001⁃2603 2001.[15]RogetB SitaramanJ.Robustandefficientoversetgridassemblyforpartitionedunstructuredmeshes[J].JournalofComputationalPhysics 2014 260 1⁃24.[16]常兴华马戎张来平.并行化非结构重叠网格隐式装配技术[J].航空学报2018 39(6) 121780.ChangXH MaR ZhangLP.Parallelimplicithole⁃cuttingmethodforunstructuredoversetgrid[J].ActaAeronauticaetAstronauticaSinica 2018 39(6)121780(inChinese).[17]ChangXH MaR WangNH etal.Parallelimplicithole⁃cuttingmethodforunstructuredChimeraGrid[C].10thInternationalConferenceonComputationalFluidDy⁃namics(ICCFD10) 2018 Barcelona Spain.[18]BlomFJ.Considerationsonthespringanalogy[J].Inter⁃nationalJournalofNumericalMethodsinFluids 200032(6) 647⁃668.[19]BatinaJT.UnsteadyEulerairfoilsolutionsusingunstruc⁃tureddynamicmeshes[J].AIAAJournal 1990 28(8)1381⁃1388.[20]LiuXQ QinN HaoX.FastdynamicgriddeformationbasedonDelaunaygraphmapping[J].JournalofCompu⁃tationalPhysics 2006 211(2) 405⁃423.[21]RendallTCS AllenCB.Efficientmeshmotionusingradialbasisfunctionswithdatareductionalgorithms[J].JournalofComputationalPhysics 2009 229(17)6231⁃6249.[22]RendallTC AllenCB.Reducedsurfacepointselectionoptionsforefficientmeshdeformationusingradialbasisfunctions[J].JournalofComputationalPhysics 2010229(8) 2810⁃2820.[23]张来平段旭鹏常兴华等.基于Delaunay背景网格插值和局部网格重构的变形体动态混合网格生成技术[J].空气动力学学报2009 27(1) 32⁃40.ZhangLP DuanXP ChangXH etal.Ahybriddy⁃namicgridgenerationtechniqueformorphingbodiesbasedonDelaunaygraphandlocalremeshing[J].ActaAerodynamicaSinica 2009 27(1) 32⁃40(inChi⁃nese).[24]张来平常兴华赵钟等.复杂外形静动态混合网02第6期常兴华等并行重叠/变形混合网格生成技术及其应用格生成技术研究新进展[J].气体物理2016 1(1)42⁃61.ZhangLP ChangXH ZhaoZ etal.Recentprogressofstaticanddynamichybridgridgenerationtechniqueso⁃vercomplexgeometries[J].PhysicsofGases 2016 1(1) 42⁃61(inChinese).[25]ZhangLP ChangXH DuanXP etal.Applicationsofdynamichybridgridmethodforthree⁃dimensionalmov⁃ing/deformingboundaryproblems[J].Computers&Flu⁃ids 2012 62 45⁃63.[26]HeX HeXY HeL etal.HyperFLOW Astructured/unstructuredhybridintegratedcomputationalenvironmentformulti⁃purposefluidsimulation[J].Pro⁃cediaEngineering 2015 126 645⁃649.[27]常兴华马戎张来平等.基于计算流体力学的 虚拟飞行 技术及初步应用[J].力学学报2015 47(4) 596⁃604.ChangXH MaR ZhangLP etal.StudyonCFD⁃basednumericalvirtualflighttechnologyandpreliminaryapplication[J].ChineseJournalofTheoreticalandAppliedMechanics 2015 47(4) 596⁃604(inChi⁃nese).[28]ZhangLP ChangXH MaR etal.ACFD⁃basednu⁃mericalvirtualflightsimulatoranditsapplicationincontrollawdesignofamaneuverablemissilemodel[J].ChineseJournalofAeronautics 2019(inpress).[29]ChangXH MaR ZhangLP etal.Furtherstudyonthegeometricconservationlawforfinitevolumemethodondynamicunstructuredmesh[J].Computers&Fluids2015 120 98⁃110.[30]马戎常兴华赫新等.流动/运动松耦合与紧耦合计算方法及稳定性分析[J].气体物理2016 1(6)36⁃49.MaR ChangXH HeX etal.Looseandstrongcou⁃plingmethodsforflow/kinematicscoupledsimulationsandstabilityanalysis[J].PhysicsofGases 2016 1(6) 36⁃49(inChinese).12。
Delaunay四面体网格并行生成算法研究进展
Ab ta t n o d r t a c l r t t e p o e s f me h g n r t n, a d t k u l a v n e o a i u sr c :I r e o c e e a e h r c s o s e e a i o n a e f l d a c f v ro s
D lu a e n y四面体 网格 并行 生成 算 法研 究 进展 a
王 磊, 聂玉峰, 李义强
( 北工业大学理学院 西
( fi@ n u e u c ) yn e wp . d . n
西安
70 2 ) 1 1 9
摘
要 :纵 观 近 2 O年 国 内外 D l n y四面 体 区域 分 解 模 式 和 基 于 e ua a 依
a g ihm s a e ca s fe nt o a n de o l ort r l s ii d i o d m i c mpo ii n m o e a od — s d mo e sto d nd n e ba e d .A n h l ort d t e a g ihms o f d oma n d c m p ii o r u t e s i gu s d a he d c pld s ta d t e c up e o tby t i e o oston m de a e f r h rditn i he st e ou e or n h o l d s r he c ompl x t o c mm u c ton . The e iy f o nia i s n, t f a u e o pr s n e mode a e o nt d ut h oug he e t r s f ee td s r p i e o t r h s ve i o e r s nt tv a a l lDe a a e r he r lm e h ge e a i l ort swih r s c o ur y ng s me r p e e a i e p r le l un y t t a d a s n r ton a g ihm t e pe tt
非结构网格的并行生成及其计算
南京航空航天大学硕士学位论文摘要研究非结构网格的快速生成在流场计算中有着至关重要的意义。
本文的主要目的是研究和发展非结构网格的并行生成技术,以实现快速生成非结构网格,从而为流场数值计算节省大量时间。
进一步配合流场有效的并行计算算法,最终可实现高效、快捷地模拟复杂流场。
本文改进了R.Lohner的“波阵面”区域分裂算法,使得区域分裂后的子区域及其边界更有益于网格的并行生成:针对区域初分裂后的公共边界,本文提出边界优化策略,改善了边界的光滑性,有益于并行生成过程中网格的质量。
利用改进的区域分裂算法,对并行生成的初始网格重薪划分,实现了网格的并行光顺,其中“虚拟”边界节点的光顺需要子区域之间相互通讯。
完善了文献[1]、[13]中的子区域内生成网格时接受新点及新单元的条件,在界面网格生成过程中,本文提出只接受新单元而拒绝新点的策略,节省了机时。
并行生成的时间、效率、加速比表明以上网格并行生成方法是高效的、可行的,成功实现了网格的快速生成。
在以上菲结构网格并行生成工作的基础上,本文进一步利用Euler方程的有限体积分区并行计算方法,对无粘可压缩绕流流场,在PVM分布式并行环境下进行了数值模拟。
在Euler方程的分区并行计算过程中,本文采用了Jameson有限体积法和四步Runge—Kutta显示时间推进格式。
流场区域的划分采用改进的“波阵面”区域分裂算法,“虚拟”边界单元的物理量的计算由子区域之间相互通讯来完成,信息的发送方式采用“循环式”发送方式。
数值试验的结果以及并行计算的加速比、效率的统计,进一步验证了网格并行生成方法以及并行计算算法的有效性。
关键{司:区域分裂;非结构网格;网格并行生成;有限体积法;并行计算非结构网格的并行生成及计算Abstract111estudyonhowtoqmcEygenerateunstructuredgridsisofgreatsignificanceforthefluidflowcalculation.Inordertosavethetimeofunstructuredmeshgeneration,themainworkofthispaperistodevelopthetechniqueofparallelunstructuredgridgeneration.Withtheeffectiveparallelcomputationalgorithm.thesimulationofcomplexinviscidflowisfinallyachievedmoreefficientlyandquickly.Inthispaper,wefirstlyimprovetheR.Lohner’Swavefrontdomain—splittingalgorithmthatthesubgridsandtheirboundariesaremorefavorableforgridgeneration.AnewSOoptimizationstrategyofsubdomain’Sboundaryisthenpresentedinordertoimprovethesmoothnessofboundariesandthequalityofgrids.Aftersubdividingtheinitialmeshesbyusingtheabovedomain-splittingalgorithm,wesmooththegridbytheparallelmethod.Inthisphase,smoothing‘‘subjunctive’’boundarypointsneedsmutualcommunicationofsubdomains.Next,wealsoimprovetheconditionsinthepaper【1],[13]ofreceivingnewpointsandelementsinthecourseofgridgenerationinthesubdomainandpresentanewstrategyofreceivingnewelementsonlyandrefusingnewpointsduringthecourseofgridgenerationoftheinterface,whichcansparemuchtime.TheresultsobtainedonthePVMenvironmentdemonstratehigheffectivenessofthealgorithms.Basedontheabovealgorithmofparallelunstructured鲥dgeneration,aparallelcomputingmethodiSappliedtoa2-DEulersolverfortransonicandsupersonicflowonaPVMparallelenvironment.Jamesonfinitevolumeschemeandfour.stageRung—Kuttatime-steppingmethodareemployedintheprocessofthezonalparallelcomputationofEulerequations.The“wavefront”domaindecompositionmethoddevelopedaboveiSusedinthedivisionofflowfielddomain.Thequantityofphysicsvariablesonthe“subjunctive”boundaryelementsneedsmutualcommunicationofsubdomainsduringthesimulation.Theresultsofnumericalexperiments,thestatisticsofspeedupratioandparallelefficiencyallshowthesuccessofparallelunstructuredgridgenerationmethodandparallelcomputationalgorithm.KeyWords:Domain-splitting,UnstructuredGrid,ParallelGridGeneration,FiniteVolumeScheme,ParallelComputingMethodII堕室堕至堕丞查堂堡主堂垡丝苎——第一章绪论1.1问题的背景近二三十年来,计算流体力学(CFD)作为现代流体力学新兴的学科分支,发展极为迅速,也取得了很大成功,已经与理论分析、风洞试验和飞行试验一起成为流体力学研究和飞行器设计的重要手段。
三维DGTD若干关键技术研究

三维DGTD若干关键技术研究三维DGTD若干关键技术研究引言:在现代科学和工程领域,电磁场分析是一项重要的任务。
全电动车、通信系统、无线充电、设备辐射和抗电磁干扰等多个领域都需要进行电磁场分析。
因此,研究电磁场分析的方法和技术具有重要的现实意义。
离散时域求解器(DGTD)是一种众所周知的电磁场求解方法,在三维电磁场分析中得到了广泛的应用。
本文将介绍三维DGTD方法的若干关键技术研究以及对该方法的进一步改进。
一、DGTD方法基础DGTD方法是一种基于时域有限差分法的求解电磁场的方法,该方法将时域Maxwell方程组进行离散,采用有限差分格式,通过求解离散的Maxwell方程组得到电磁场的时变解。
DGTD 方法通过将时域Maxwell方程离散化来模拟电磁场的传播和相互作用过程,可以获得电磁场的时域解。
DGTD方法具有良好的稳定性和精度,特别适用于模拟电磁场的快速变化过程。
二、网格生成技术网格生成是DGTD方法的关键技术之一。
网格的好坏直接影响到DGTD方法的计算精度和计算效率。
传统的网格生成方法主要有结构化网格和非结构化网格两种。
结构化网格生成方法简单易行,但对于复杂的几何模型难以处理;非结构化网格生成方法可以较好地适应复杂几何模型,但生成过程较为复杂。
针对三维DGTD方法中复杂几何模型的网格生成问题,研究人员提出了多种改进的网格生成算法,如自适应网格生成算法、转换融合法等。
这些算法可以使得DGTD方法能够在复杂几何模型下得到更高的计算精度和计算效率。
三、边界条件处理技术边界条件处理是DGTD方法中的关键问题之一。
在求解离散的Maxwell方程组时,需要给出节点上的电磁场初值和边界条件。
一般来说,边界条件包括电场、磁场和电流的边界条件。
对于比较简单的边界条件,如简单电磁屏蔽箱和简单介质表面,可以采用传统的边界条件处理方法。
但是,对于复杂的边界条件,如不规则表面和多层介质边界条件,传统的边界条件处理方法不再适用。
FLUENT 软件的多重网格并行算法及其性能
FLUENT软件的多重网格并行算法及其性能余江洪1,朱宗柏1,2,肖金生1,3(1武汉理工大学材料复合新技术国家重点实验室,2现代教育技术中心,3汽车工程学院,湖北430070)摘要:FLUENT软件是目前国际上比较流行的通用CFD软件包,用于模拟从不可压缩到高度可压缩范围内的复杂流动,对大规模问题可用并行多重网格方法进行求解。
为了找出FLUENT软件的最佳解题规模和并行粒度,以期最大限度地发挥软件和硬件的效能,对FLUENT软件采用的多重网格方法和区域分裂法进行了理论分析,通过反复实验,重点讨论了在并行求解过程中,采用不同的多重网格循环方法、区域网格分裂方法、解题的规模和计算节点数对并行性能的影响。
FLUENT软件有良好的并行性能,PEM Fuel Cell模块可以进一步优化,HPCC还有很大的升级空间。
关键词:燃料电池;多重网格;区域分裂;并行计算;FLUENTFLUENT软件是一种CFD(Computational Fluid Dynamics)求解器,它可以求解各种复杂流动,包括不可压缩流动(低亚音速)、弱可压流动(跨音速)和强压缩性问题(超音速)。
1由于FLUENT软件有多种求解方法的选择,并且提供了多重网格方法来加快收敛速度,同时可以进行并行计算,因此它可以为速度范围很广的流动问题提供高效准确的最优求解方案。
本文介绍了FLUENT软件的多重网格及并行算法,并测试、分析了其并行性能。
1 FLUENT软件中的多重网格方法多重网格方法(MGM:MultiGrid Method)是一种高效的串行数值计算方法。
其基本思想是,利用粗网格上的残差校正特性消除迭代误差的低频分量(长波分量,即光滑误差),同时利用细网格上的松驰光滑特性消除迭代误差的高频部分(短波分量,即振荡误差),套迭代技术负责通过限制和插值算子连接所有网格层共同求解同一问题[1][2][3][4]。
多重网格循环可以定义为在每一个网格层面通过网格层次时在网格层面内应用的递归程序,该程序通过在当前层面完成单一网格循环来扩展到下一个粗糙网格层面。
动网格生成技术
第4卷第1期空 军 工 程 大 学 学 报(自然科学版)V ol.4No.1 2003年2月JOURNAL OF AIR FORCE ENGINEERING UNIVERSIT Y(NAT URAL SC IE NCE EDIT ION)F eb.2003动网格生成技术史忠军, 徐 敏, 陈士橹(西北工业大学航天工程学院,陕西西安 710072)摘 要:基于动气动弹性仿真中二维动网格方法的研究,提出了一种三维动网格生成技术,该方法的主要特点是在计算域内利用原有的初始网格进行插值计算来构造新网格。
对于流体-结构耦合中每时间步长计算的动网格算法主要考虑网格的稳定性和计算效率。
最后,选取了二维、三维中一些有代表性的实例进行了演示,结果表明对于变形量不是很大的情形是令人满意的。
关键词:动气动弹性;动网格;计算流体力学中图分类号:V224;TJ81 文献标识码:A 文章编号:1009-3516(2003)01-0061-04随着计算机设备和计算技术发展,CFD常常用于各种学科之中,如优化设计、气动弹性、热分析、气动伺服弹性[1]。
对于这些问题在小扰动的条件下采用线性方法可以得到很好的解决,但对复杂流场(振动诱发涡流、跨音速颤振、大控制面的运动)要求使用非线性方法,并需要借助大规模的并行计算平台技术。
CFD 在各门学科中应用还包括结构载荷计算、表面运动分析、优化设计的区域变形技术,即动网格生成技术。
在气动外形设计和气动弹性优化[2]中,对飞行器气动弹性性能和飞行品质的评估,必须依据飞行器外形的变化,对网格不断地作相应的调整,如颤振分析中,在每一时间步长结构发生变形,我们需要及时给CFD计算提供这一信息,就需要使用动网格来适应运动的物面。
因此,我们必须对网格再生成的有效性和效率的问题进行研究。
对于动网格的算法,最大的困难在于防止边界网格点重复交错和网格点丢失。
一种最简单的方法就是根据新的物面重新生成计算网格,但需要花费大量的时间。
ANSYS Fluent Meshing网格生成界面及流程

– Undo is available until the next meshing operation or until the panel is closed
• 使用方法
– In Parallel panel activate Auto Partition – Use Auto Mesh and select Prisms + Tet – For saving file in hdf5 format (beta) use
• file/write-case filename.cas.h5 yes
R17.0
R17.0
Icon help text option Highlight when picking
• Objects • Volumetric Regions • Cell Zones
Camera
R16.2
快捷键图标
• 图标和Ribbon功能区的灵活性
– 当窗口尺寸缩小时
• Ribbon功能区的选择式区域会自动
目录树中使用含义丰富的图标来标识各节点
• 设计流程更加清晰明了
• 各节点的图标含义更加丰富
– Note that Volumetric regions Icons are changing after the region is meshed
– Regions and Cell Zone Icons are indicating the Cell Zone type (Fluid, Solid, Dead)
reselect the two zones again
并行计算在海洋模拟中的应用

并行计算在海洋模拟中的应用随着科技不断进步,计算机技术得到了迅速发展。
与此同时,传统的海洋观测方法已不足以满足科研和工业生产的需求。
因此,海洋模拟技术应运而生。
海洋模拟技术可以在保持真实性的同时,快速高效地进行多种预测和分析。
并行计算技术就是其中一种关键的技术。
并行计算,顾名思义,指多台计算机在同一时间内共同执行一些任务,避免资源的浪费。
可以有效提高计算机的处理能力,缩短计算时间,大大提高工作效率。
在海洋模拟中,常用的并行计算技术有MPI(Message Passing Interface)、OpenMP、CUDA等。
MPI是基于消息传递的并行计算技术,适用于大规模的并行计算。
在MPI中,各节点之间通过通信传递数据,相对独立地进行计算。
将计算和数据通信分离,可以有效提高程序的复杂性和可重用性。
在海洋模拟中,MPI可以将海洋模拟分成多个子任务,加速计算速度,更好地处理海洋模拟中的物理问题。
OpenMP是一种共享内存并行计算技术。
在OpenMP中,主存储器被所有处理器共享,程序中仅有一份主存储器副本。
并行做法是通过线程来实现的,每个线程拥有一份完全独立的计算副本。
因此,OpenMP非常适合中型规模的并行计算。
海洋模拟中的并行计算,可以通过使用OpenMP来实现数值模拟、网格生成和图像处理等任务。
CUDA是一种由NVIDIA开发的异构并行计算技术,可以使用GPU进行海量数据的高速计算。
CUDA采用了SIMT(Single Instruction Multiple Thread)架构,一条指令可以同时并行执行多个线程,具有高速的数据传输和并行计算能力。
在海洋模拟中,CUDA可以处理流体力学、环流、海浪、海洋气候等复杂模拟问题,加速模拟速度和精度。
当然,并行计算在海洋模拟中也存在着一些挑战。
首先是数据管理和通信代价问题。
并行计算中,任务需要通过网络发送和接受数据,因此需要注意数据保存和传输方式,以及数据的一致性维护。
基于GPU的并行非结构网格生成技术研究

f r a m e w o r k o f C U D A i s p u t f o r w rd a . I n C U D A p r o g r a mm i n g f r a m e w o r k , u st n r u c t u r e d m e s h g e n e r t a i o n t e c h n o l o y g i s a p p l i e d t o
g e n e r a t i o n m e t h o d f o u n s t r u c t u r e d g r i d i s r e s e a r c h e d , a n d t h e G P U u n s t r u c t u r e d m e s h g e n e r a t i o n t e c h n o l o g y b a s e d O f t t h e
耗。
关 键词 : 非 结构 网格 ; 网格 并 行生 成 ; D e l a u n a y 三角化; GP U; 加 速 比
中图分类号 : T H1 6 ; T P 3 l 1
文献标识码 : A
文章编号 : 1 0 0 1 — 3 9 9 7 ( 2 0 1 3 ) 0 2 — 0 1 8 4 — 0 3
( 1 . 西南科技大学 制造科学与工程学院, 四川 绵阳 6 2 1 0 1 0 ; 2 . 中国空气动力研究与发展 中心 软件开发 中心, 四川 绵阳 6 2 1 0 0 0 )
摘 要: 为了解决非结构 网格 生成在 时间和 内存上的问题 , 研究了非结构 网格的并行生成方法 , 提 出了一种基于 C U D A
( 1 . S c h o o l o f Ma n u f a c t u r i n g S c i e n c e a n d E n g i n e e r i n g,S o u t h w e s t U n i v e r s i t y o f S c i e n c e a n d T e c h n o l o g y , S i c h u a n Mi a n y a n g
利用CAD进行流体分析的步骤与技巧
利用CAD进行流体分析的步骤与技巧CAD(计算机辅助设计)是一种常用的软件工具,可用于在工程领域进行各种设计和分析操作。
在涉及流体力学的项目中,利用CAD进行流体分析是一项关键任务。
本文将介绍利用CAD进行流体分析的步骤与技巧,帮助读者更好地理解如何运用CAD软件进行流体分析。
1. 准备工作在开始流体分析之前,首先要准备好所需的CAD模型。
这可以通过手绘图纸或其他CAD软件制作。
确保模型准确无误,并包含所需的所有细节。
2. 导入CAD模型将准备好的CAD模型导入流体分析软件中。
大多数流体分析软件支持直接导入常见的CAD文件格式,例如。
IGES,.STEP和.PARASOLID。
确保导入后的模型在流体分析软件中准确无误。
3. 准备边界条件在进行流体分析之前,需要设置适当的边界条件。
这包括定义流体的入口和出口位置,以及所需的速度、压力等参数。
根据实际情况,设置合理的边界条件对于准确分析流体行为非常重要。
4. 网格生成流体分析软件通常要求对CAD模型进行网格划分,以便更好地模拟流体流动的行为。
通过在模型表面上放置网格节点,形成划分好的网格结构。
在进行网格生成时,应根据实际情况选择合适的网格密度,以平衡计算精度和计算时间的要求。
5. 设置求解器参数选择合适的求解方法和参数是进行流体分析的关键。
根据实际情况和研究目标,在流体分析软件中设置适当的求解器参数,例如离散化方法、数值格式、收敛准则等。
这些参数的选择将直接影响到流体分析结果的准确性和计算效率。
6. 运行流体分析经过前面的准备工作,现在可以运行流体分析了。
根据流体分析软件的操作流程,将设置好的边界条件和网格导入流体分析软件,并运行求解器进行计算。
在计算过程中,及时监测计算的收敛状况,并根据需要进行调整和优化。
7. 分析结果流体分析完成后,得到的结果可以用于分析流体的行为和性能。
根据流体分析软件的功能,可以获得各种结果,如流速场、压力分布、涡旋结构等。
cfddem耦合接口编译

CFDDem耦合接口编译1. 介绍CFDDem(Computational Fluid Dynamics DEM)是一种耦合了计算流体力学(CFD)和离散元(DEM)方法的数值模拟技术。
该技术可以用于模拟颗粒与流体之间的相互作用,广泛应用于颗粒流、气固流、泥浆流等领域的研究。
在CFDDem中,耦合接口编译是一个关键步骤,它将CFD和DEM两个不同的数值模型进行有效地耦合,并确保模拟结果的准确性和稳定性。
本文将详细介绍CFDDem耦合接口编译的相关内容,包括编译过程、关键技术和应用实例等。
2. 编译过程CFDDem耦合接口编译主要包括以下几个步骤:2.1 确定接口类型首先需要确定CFD和DEM之间的接口类型。
常见的接口类型有两种:基于物理场变量的直接耦合接口和基于人工力的间接耦合接口。
基于物理场变量的直接耦合接口通过求解Navier-Stokes方程和运动方程来实现CFD和DEM之间的相互作用。
这种接口能够较准确地描述颗粒与流体之间的相互作用,但计算量较大。
基于人工力的间接耦合接口通过引入额外的力项来模拟颗粒对流体的作用。
这种接口计算量较小,但对于某些特殊情况下的相互作用描述可能不够准确。
2.2 接口代码开发根据确定的接口类型,需要开发相应的接口代码。
接口代码主要包括两部分:CFD模型中与DEM相关的代码和DEM模型中与CFD相关的代码。
在CFD模型中,需要添加颗粒对流体的作用力项,并将该力项添加到Navier-Stokes方程中进行求解。
在DEM模型中,需要添加流体对颗粒的作用力项,并将该力项添加到运动方程中进行求解。
编写接口代码时需要考虑数据传递和计算效率等因素,以保证耦合过程的稳定性和高效性。
2.3 接口编译完成接口代码开发后,需要进行编译操作。
编译过程主要包括以下几个步骤:•配置编译环境:安装所需的编译器和相关库文件,并进行环境配置。
•检查依赖关系:检查接口代码中的依赖关系,确保所需的库文件和头文件已正确配置。
基于多核异构的代数多重网格的并行算法实现
基于多核异构的代数多重网格的并行算法实现刘荣;陈华;李庆贺;张艺丹;贾昌辉【摘要】近年来,受GPU其高浮点峰值性能的提高和应用领域中大规模科学计算问题的驱动,高性能领域中利用代数多重网格(AMG)求解稀疏线性方程组成为研究热点.针对经典的AMG算法,探究建立阶段(网格粗化)和求解阶段的并行计算结构,提出基于多核异构的AMG并行计算模式.数值实验表明,并行计算模式计算效率相对于串行提高了3~4倍,加速效果明显.【期刊名称】《科学技术与工程》【年(卷),期】2014(014)014【总页数】5页(P120-124)【关键词】代数多重网格;并行计算;多核异构;GPU【作者】刘荣;陈华;李庆贺;张艺丹;贾昌辉【作者单位】中国石油大学(华东),青岛266580;中国石油大学(华东),青岛266580;中国石油大学(华东),青岛266580;中国石油大学(华东),青岛266580;中国石油大学(华东),青岛266580【正文语种】中文【中图分类】O151.2;O246;TP312近年来,图形处理器(GPU)由于其高浮点峰值性能和其可编程性,越来越多的应用与高性能计算领域。
随着GPU和CPU的计算能力的不断提升,将两者整合以提高效率成为研究热点。
CPU+GPU的模式是一种简单、有效的并行模式,在并行计算过程中充分利用CPU的高计算能力和GPU的细粒度并行的优势,达到资源的充分利用。
代数多重网格(简称“AMG”)[1,2],是高性能领域求解稀疏线性方程组的重要方法,广泛应用于地下水勘探、爆炸性材料建模、电磁学应用、核物理应用等领域。
多重代数网格在算法上具有良好的可拓展性,在求解每个非零元所需的操作数可以为常数,不随并行规模的扩大而增加。
因此提高AMG算法的计算效率对于科学计算具有重要的意义。
目前,李佳佳等[3]提出了AMG中稀疏矩阵的GPU并行乘法,在求解阶段提高了AMG的求解效率,提高了2~3倍的计算效率。
徐小文,莫则尧[4]通过探究代数多重网格网格粗化的并行算法,在建立阶段优化了网格粗化的效率。
高性能计算技术在流体力学仿真中的应用教程
高性能计算技术在流体力学仿真中的应用教程随着科技的不断发展,高性能计算技术在各个领域的应用也越来越广泛。
其中,在流体力学仿真领域,高性能计算技术的应用已经成为提高效率和精确性的重要手段。
本文将介绍高性能计算技术在流体力学仿真中的应用,并提供一些教程和指导,帮助读者更好地理解和应用这一领域的技术。
一、高性能计算技术在流体力学仿真中的作用和优势1. 提高计算效率:流体力学仿真通常需要进行大规模的计算,这对计算机的计算能力提出了很高的要求。
高性能计算技术的应用可以充分利用大规模并行计算的能力,提高计算的效率,缩短仿真时间。
2. 提高计算精度:流体力学仿真通常需要解决大量的偏微分方程,计算结果的准确性对于科学研究和工程设计非常重要。
高性能计算技术可以提供更高的计算精度,通过增加计算节点和迭代次数,获得更精确的仿真结果。
3. 扩展计算规模:在某些复杂问题中,需要将流体力学仿真扩展到大规模的计算领域,例如风电场的仿真、洪涝模拟等。
高性能计算技术可以通过并行计算和分布式计算,支持大规模的仿真计算,满足扩展计算规模的需求。
二、高性能计算技术在流体力学仿真中的应用案例1. 空气动力学仿真:空气动力学仿真是流体力学仿真的重要应用领域之一。
通过对飞机、汽车等物体在空气中的流动进行仿真,可以评估飞行器设计的空气动力学性能,并进行优化设计。
高性能计算技术可以提供更高的计算效率和精度,加速飞行器的设计过程。
2. 水动力学仿真:水动力学仿真是对水流、水波、液体运动等进行仿真的技术。
在船舶设计、海洋工程等领域,水动力学仿真被广泛应用。
高性能计算技术可以处理复杂的流体力学方程组,提供准确的水动力学仿真结果,为工程设计和决策提供支持。
3. 天气预报和气候模拟:天气预报和气候模拟是流体力学仿真的重要应用之一。
通过对大气流动和海洋环流等进行仿真,可以提供准确的气象信息,对天气预报和气候变化进行模拟和预测。
高性能计算技术可以处理大规模的气象数据集,提供更准确的天气预报和气候模拟结果。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
并行网格生成技术
分类
基于以下三种网格生成技术:Delaunay 网格前沿法,边细分法。
并行网格生成将原始网格生成问题划分成N个子问题来求解。
子问题的求解可分为以下三种形式:
紧耦合,部分耦合,无耦合。
并行网格生成中的难点在于
1.维持并行算法的稳定性,使得并行算法的结果正确。
2.代码重用:将原始算法移植为并行算法时不需要改动原始算法代码,并且能保证并行算法的正确性。
基于Delaunay的方法
空洞算法:
上述算法并行化后引发如下问题:
图(a)中两个空洞相交,使得产生的三角剖分边相交。
图(b)中两个空洞共享一条边,使得最终产生的剖分可能不满足德劳内空圆准则。
紧耦合算法:
Parallel Optimistic Delaunay Meshing Method (PODM)
PODM算法对子网格划分没有要求,这个算法通过重新划分子网格边界来保证算法稳定性。
如下图(a)所示,空洞扩展到子区域之外时,将通过子区域之间的通信来保证算法的正确性。
因此,这个算法是紧耦合的,不具备代码重用性。
图(a)是空洞扩展到子区域之外的情况。
图(b)是并行插入时的同步时间图。
无耦合算法:
Parallel Projective Delaunay Meshing (PPDM)
PPDM算法的基本思想是预先计算出Delaunay-admissible子区域边界。
即,最终生成的Delaunay剖分将包括这个边界。
这样,每个子网格就可以完全独立的计算各自剖分。
因此,这个算法是无耦合并且是可完全代码复用的。
生成Delaunay-admissible子区域边界的基本思想如下:
先生成三维点集的一个凸壳。
首先用Inertia Axis分割法将凸壳用平面II分成两个近似相等
的部分。
然后搜索所有三角面(如上图),使得存在一个空球,球心在平面II上,球面经过P,Q,R且球内不包含其它任何点。
这样,这些三角面就构成了一个Delaunay-admissible边界。
部分耦合算法:
Parralel Constrained Delaunay Meshing (PCDM) method
Parrallel Advancing Front Tchnique (PAFT)
图(a) 并行网格生成
图(b) 移动和重新生成网格技术
PAFT算法如下:
While 存在活动面(可扩展的边界):
对这些活动点构造一个八叉树
维持包含活动点的八叉树,扩展活动边界。
For(ISHFT = 0; ISHFT < 2; ++ ISHFT)
If ISHFT>0
将当前区域移动一个值
Endif
对每个区域并行的利用前沿法生成三角网格EndFor
EndWhile。