基于TLS-ESPRIT算法的DOA估计
基于改进ESPRIT算法的波达方向估计
X = As + n1
(1)
子阵 2 中的接收信号的数据向量为 :
Y = AΦs + n2
(2)
式中 : X , Y均为 ( M - 1) ×1 的向量 ; A为 ( M - 1) ×D 的
矩阵 ; s 为 D ×D 的信号矩阵 ; n1 , n2 均为数学期望为 0 ,
方差为σ2 的阵元间噪声 , ( M - 1) ×1 的向量 。由两个 阵
(4) 计算 Ψ = (U1H U2 ) - 1 U1H U2 的特征分解 ,估计值 为 ejωi ( i = 1 ,2 , …, D - 1) 。由于其特征值等于Φ的对角 线元素 ,即解ωi = βΔdco s (φi ) ( i = 1 ,2 , …, D) 可以得 出来波信号的入射角度 。
2 基于 UCA 模式空间的 TLS2ESPRIT 算法
ESPRI T 算法是 Roy 等提出的一种基于子空间的 高分辨 力 的 DOA 估 计 方 法[2] 。本 文 首 先 对 应 用 于 ULA 的 ESPRIT 算法进行推导 ,并提出两种改进的 TL S2ESPRI T 算法 ,然后推广到 U CA 中 ,最后对上述 各种算法的性能进行了详细的计算机仿真和对比分析 。
列的结构可以知 ,Φ是每个信号到达两个阵列相应的延
迟相位 ,为 D ×D 的对角阵 , 可表示为 :
Φ
=
dia
g
(ejβΔxco
s
φ 0
e, jβΔxco
sቤተ መጻሕፍቲ ባይዱ
φ 1
,
… e, ) jβΔxcos
φ
D-
1
(3)
在复数域 , Φ只相当于比例算子 , 但在实数域 ,Φ相
基于ESPRIT算法的十字型阵列MIMO雷达降维DOA估计

基于ESPRIT算法的十字型阵列MIMO雷达降维DOA估计梁浩;崔琛;余剑【摘要】该文针对十字型阵列配置下的单基地MIMO雷达2维空间角度估计问题,提出一种基于ESPRIT算法的降维DOA估计算法.算法通过降维矩阵的设计及回波数据的降维变换,将高维回波数据转换至低维信号空间,最大程度地去除了所有的冗余数据;利用矩阵的酉变换进行实数域信号子空间的估计,并基于ESPRIT算法实现2维空间角度的联合估计及参数的自动配对.算法不牺牲阵列孔径,在获取信噪比增益和快拍增益的同时,有效降低了回波数据的维数,具有更低的运算复杂度.仿真结果验证了理论分析的正确性和算法的有效性.【期刊名称】《电子与信息学报》【年(卷),期】2016(038)001【总页数】10页(P80-89)【关键词】MIMO雷达;十字型阵列;降维ESPRIT;酉变换【作者】梁浩;崔琛;余剑【作者单位】合肥电子工程学院401室合肥230037;合肥电子工程学院401室合肥230037;合肥电子工程学院401室合肥230037【正文语种】中文【中图分类】TN9581 引言多输入多输出(Multiple Input and Multiple Output, MIMO)技术为雷达理论的发展提供了广阔的思路,以此为基础体制的MIMO雷达在目标检测、参数估计、杂波抑制等方面具有诸多优势[1,2],已成为现代雷达发展趋势的综合体现。
根据信号处理方式的不同,MIMO雷达可以分为分布式MIMO雷达和相干式MIMO雷达;本文以相干式MIMO雷达为研究对象,重点研究单基地配置下的多目标参数估计问题。
单基地MIMO雷达因其虚拟扩展能力,能够获取比传统相控阵雷达更大的虚拟孔径,在参数估计性能方面优势明显。
鉴于虚拟扩展后与1维线性阵列的等效相似性,目前的研究大多是将传统基于相控阵雷达的高分辨算法直接推广应用,文献[3]的最大似然算法可以直接用来求解1维角度,且估计性能能够逼近理论下界,同时对单基地MIMO雷达阵列流型没有要求,但需要高维的参数搜索,运算量较大;文献[4]通过设计相应的降维矩阵,将原始单基地MIMO雷达高维回波数据转换到了低维信号空间,去除了虚拟扩展中所有的冗余数据,因此降低了后续处理的数据维数,但其参数求解涉及1维Capon谱搜索;文献[5]在进行降维变换之后,直接利用ESPRIT算法进一步降低了算法整体的运算复杂度;文献[6]在文献[5]的基础上进一步通过酉变换,充分利用复观测数据及其共轭数据来提高ESPRIT算法的参数估计精度;文献[7,8]针对传统MIMO雷达发射功率分散的问题,从波束域空间的角度优化发射波束加权矩阵,将发射功率聚集范围于期望发射方向,以此进一步提高参数估计性能及精度。
基于 ESPRIT 的多基线分布式阵列DOA 估计方法
基于 ESPRIT 的多基线分布式阵列DOA 估计方法马严;陈伯孝;杨明磊;党晓方【期刊名称】《系统工程与电子技术》【年(卷),期】2014(000)008【摘要】In order to improve the accuracy of direction-of-arrival(DOA)estimation with distributed arrays in a low signal-to-noise ratio (SNR)scenario,and to loosen the restrictions on array aperture extension,a DOA estimation method based on estimation of signal parameters via rotational invariance techniques (ESPRIT)is proposed for multi-baseline distributed arrays.The configuration of the distributed array is firstly optimized to obtain multi-baseline subarrays.Then high accuracy and unambiguous DOA estimates are obtained by the com-bination of ESPRIT algorithm and the multi-step disambiguation method.Moreover,the threshold effect on the DOA estimation method is analyzed via the maximum a posteriori criterion.Furthermore,approximate methods for SNR threshold and baseline threshold calculations arepresented.Finally,simulation results are given to verify the effectiveness of the proposed method.%为了提高分布式阵列在低信噪比(signal-to-noise ratio,SNR)条件下的波达方向(direction-of-arri-val,DOA)估计性能,同时放宽阵列物理孔径扩展程度的限制,提出了一种基于旋转不变子空间(estimation of signal parameters via rotational invariance techniques,ESPRIT)的多基线分布式阵列DOA 估计方法。
基于精确模型定阶TLS-ESPRIT方法的电能质量参数估算
基于精确模型定阶TLS-ESPRIT方法的电能质量参数估算
海瑛;陈敬虞
【期刊名称】《嘉兴学院学报》
【年(卷),期】2013(25)6
【摘要】使用子空间和矩阵代数的方法估计电能质量参数(PQIs),是IEEE Std 1459-2010比较新的定义.出于这个原因,为进一步研究这些方法在PQIs估计中的有效性,从被测信号噪声的基本特性出发,提出了基于精确模型定阶的TLS-ESPRIT(总体最小二乘-旋转矢量不变技术)PQIs新估算方法;该方法采用互谱技术
处理不同采样序列的互相关矩阵,并可通过特征值分解法对检测信号的互相关函数阵进行准确“定阶”.仿真和实验结果表明,该方法在低信噪比环境下,具有良好的估算精度和效率.
【总页数】6页(P74-79)
【作者】海瑛;陈敬虞
【作者单位】嘉兴学院机电工程学院,浙江嘉兴 314001;嘉兴学院建筑工程学院,浙江嘉兴 314001
【正文语种】中文
【中图分类】TM93
【相关文献】
1.一种基于奇异值分解技术的模型定阶方法 [J], 王树青;林裕裕;孟元栋;高志强
2.基于修正四阶Cole-Cole模型的太赫兹波段生物组织介电特性估算方法探索 [J],
彭艳;逯迈;陈小强;田瑞
3.基于改进PSO算法对ARMA模型定阶新方法 [J], 孙汝儒;肖迪
4.基于Nonnegative Garrote的ARX和ARMA模型定阶方法 [J], 谭力宁;韩海涛;马红光
5.基于S型函数的随机子空间模型定阶方法 [J], 廖聿宸; 张坤; 宗周红; 吴睿
因版权原因,仅展示原文概要,查看原文内容请购买。
基于ESPRIT算法的柱面共形阵列天线DOA估计
基于ESPRIT算法的柱面共形阵列天线DOA估计齐子森;郭英;王布宏;霍文俊【期刊名称】《系统工程与电子技术》【年(卷),期】2011(33)8【摘要】由于共形天线阵列流形的多极化特性(polarization diversity,PD),信源方位参数与极化状态的“耦合”是实现共形阵列天线波达方向(direction-of-arrival,DOA)估计的主要难点.针对柱面共形阵列天线的特点,建立了柱面共形阵列天线的导向矢量模型;通过合理的阵元排列结构设计,结合ESPRIT (estimation of signal parameters via rotational invariance techniques)算法参数估计的特点,实现了信源极化状态与方位参数的去耦合,推导了ESPRIT算法多参数估计的参数配对方法,最终提出了柱面共形阵列天线盲极化DOA估计算法.计算机Monte Carlo 仿真实验验证了所提算法的有效性.%Due to the polarization diversity of conformal array manifold, the coupling between polarization parameters and bearings of source is the distinct difficulty in direction-of-arrival (DOA) estimation of conformal array antennas. In view of the characteristic of cylindrical conformal array antennas, an array manifold model for cylindrical conformal array is established. With the help of well-designed configuration of elements on cylindrical carriers and estimation of signal parameters via rotational invariance techniques (ESPRIT) algorithm, the decoupling method for DOA and polarization parameters is implemented. The parameters pairing method of ESPRIT is given when DOA of multiple sources is estimated. On this basis, a blind DOA estimation algorithm forcylindrical conformal array antenna with respect to polarization diversity is proposed. Monte-Carlo simulation results are provided to demonstrate the effectiveness of the proposed method.【总页数】5页(P1727-1731)【作者】齐子森;郭英;王布宏;霍文俊【作者单位】空军工程大学电讯工程学院,陕西西安710077;空军工程大学电讯工程学院,陕西西安710077;空军工程大学电讯工程学院,陕西西安710077;空军工程大学电讯工程学院,陕西西安710077【正文语种】中文【中图分类】TN911.7【相关文献】1.柱面共形阵列天线盲极化2D DOA 估计 [J], 张羚;郭英;齐子森;张坤峰2.柱面共形阵列天线WSF算法DOA估计性能分析 [J], 周义建;王布宏;齐子森;郭英3.柱面共形阵列高性能低复杂度DOA估计算法 [J], 杨仰强;王世练;张尔扬4.柱面共形阵列天线的极化-DOA估计 [J], 彭文灿;魏江;瞿颜;郭陈江5.柱面共形阵列DOA与极化参数高效联合估计算法 [J], 齐子森;彭大林;许华;宋佰霖因版权原因,仅展示原文概要,查看原文内容请购买。
基于ESPRIT算法的DOA估计
大学2009届本科毕业论文基于ESPRIT算法的DOA估计ESPRIT Algorithm Based on The Estimated DOA论文作者:作者学号:所在学院:计算机与信息工程学院所学专业:自动化导师职称:论文完成时间:2009年5月20日2009年5月20日大学2009届毕业论文(设计、创作)开题报告(由学生本人认真填写)大学2009届毕业论文(设计、创作)任务书指导教师签名2008年12 月 8 日大学2009届毕业设计(论文、创作)中期检查表学院名称:计算机与信息工程学院此表由教师填写备注:一、论文的质量评定,应包括对论文的语言表达、结构层次、逻辑性理论分析、设计计算、分析和概括能力及在论文中是否有新的见解或创新性成果等做出评价。
从论文来看学生掌握本专业基础理论和基本技能的程度。
二、成绩评定采用结构评分法,即由指导教师、评阅教师和答辩委员会分别给分(以百分计),评阅教师得分乘以20%加上指导教师得分乘以20%加上答辩委员会得分乘以60%即综合成绩。
评估等级按优、良、中、差划分,优90-100分;良76-89分;中60-75分;差60分以下。
三、评分由专业教研室或院组织专门评分小组(不少于5人),根据指导教师和答辩委员会意见决定每个学生的分数,在有争议时,应由答辩委员会进行表决。
四、毕业论文答辩工作结束后,各院应于6月20日前向教务处推荐优秀论文以汇编成册,推荐的篇数为按当年学院毕业生人数的1.5%篇。
五、各院亦可根据本专业的不同情况,制定相应的具有自己特色的容。
须报教务处备案。
六、书写格式要求:1、目录;2、容提要须书写200左右汉字,开题报告(文科除外)的容要根据不同专业的课题任务要求,阐述查阅文献、文案论证、解题思路、工作步骤等;3、正文(含引言、结论等);4、参考文献(或资料)大学本科生毕业论文(设计、创作)承诺书说明:学生毕业论文(设计、创作)如有等要求,请在备注中明确,承诺容第2条即以备注为准。
基于ESPRIT算法的DOA估计答辩
SNR/dB
SNR/dB
由上述的试验仿真可以得出以下结论: 1. 信噪比的高低直接影响着超分辨方位估计算法的性能。 2. 从成功概率图可以看出,MUSIC算法比ESPRIT算法成 功概率要高,MUSIC算法要优于ESPRIT算法。 3. 从估计均方根误差图上可以看出,随着信噪比的增大, ESPRIT算法的均方根误差值将会大于MUSIC算法,在高 信噪比的时候,MUSIC算法的估计精度较高。所以从整体 上看,MUSIC估计精度较高,估计值比较接近真实值。 4. 从算法的实时性来看,由于ESPRIT算法不需要进行谱 峰搜索,因而计算量相对较小,实时性更好一些。 5. 从实际应用前景来看,由于MUSIC算法对少量参数的 偏差不是太敏感,因而更适合实际应用。
成 功 概 率
SNR/dB
SNR/dB
M=10,N=100时 ESPRIT 算法的统计性能与信噪比 的关系
估 计 均 方 根 误 差
M=10,N=100时 MUSIC 算法的统计性能与信噪比 的关系
估
SNR/dB (b)
M=20,N=100时 ESPRIT 算法的统计性能与信噪比 的关系
信号源数Num为2,信号的入射角的方向分别为 5 和10 , 阵元M分别取10和20,快拍数N别100,当方位估计可以分辨 出两个信号源时,认为估计成功。分别采用ESPRIT算法与 MUSIC算法。
M=10,N=100时 ESPRIT 算法的统计性能与信噪比 的关系
成 功 概 率
M=10,N=100时 MUSIC 算法的统计性能与信噪比 的关系
空间谱估计基本原理:
通过空间阵列接收数据的相位差来确定一个或几个待估计 的参数,如方位角、俯仰角及信号源数等。
对于一般的远场信号而言,同一信号到达不同的阵元存在一个波 程差,这个波程差导致了个接收阵元间的相位差,利用个阵元间的相 位差可以估计出信号的方位。
基于ESPRIT算法的DOA估计
河南大学2009届本科毕业论文基于ESPRIT算法的DOA估计ESPRIT Algorithm Based on The Estimated DOA论文作者姓名:作者学号:所在学院:计算机与信息工程学院所学专业:自动化导师姓名职称:论文完成时间:2009年5月20日2009年5月20日河南大学2009届毕业论文(设计、创作)开题报告(由学生本人认真填写)河南大学2009届毕业论文(设计、创作)任务书指导教师签名2008年12 月8 日河南大学2009届毕业设计(论文、创作)中期检查表河南大学2009届毕业论文(设计、创作)综合成绩表(一)学院名称:计算机与信息工程学院此表由教师填写河南大学2009届毕业论文(设计、创作)综合成绩表(二)备注:一、论文的质量评定,应包括对论文的语言表达、结构层次、逻辑性理论分析、设计计算、分析和概括能力及在论文中是否有新的见解或创新性成果等做出评价。
从论文来看学生掌握本专业基础理论和基本技能的程度。
二、成绩评定采用结构评分法,即由指导教师、评阅教师和答辩委员会分别给分(以百分计),评阅教师得分乘以20%加上指导教师得分乘以20%加上答辩委员会得分乘以60%即综合成绩。
评估等级按优、良、中、差划分,优90—100分;良76-89分;中60—75分;差60分以下。
三、评分由专业教研室或院组织专门评分小组(不少于5人),根据指导教师和答辩委员会意见决定每个学生的分数,在有争议时,应由答辩委员会进行表决。
四、毕业论文答辩工作结束后,各院应于6月20日前向教务处推荐优秀论文以汇编成册,推荐的篇数为按当年学院毕业生人数的1。
5%篇.五、各院亦可根据本专业的不同情况,制定相应的具有自己特色的内容.须报教务处备案。
六、书写格式要求:1、目录;2、内容提要须书写200左右汉字,开题报告(文科除外)的内容要根据不同专业的课题任务要求,阐述查阅文献、文案论证、解题思路、工作步骤等;3、正文(含引言、结论等);4、参考文献(或资料)河南大学本科生毕业论文(设计、创作)承诺书说明:学生毕业论文(设计、创作)如有保密等要求,请在备注中明确,承诺内容第2条即以备注为准。
基于Unitary-ESPRIT算法的二维DOA估计
Ke y wo r d s :2 一 D e s t i ma t i o n o f DOA, p l a n a r a r r a y wi t h s y mme t r i c ll a y d i s t ib r u t e d s e n s o r s , 2 一 D
( X i ’ 矾E l e c t r o n i c E n g i n e e r i n g R e s e a r c h I n s t i t u t e , X i ’ 帆7 1 0 1 0 0 , C h i n a )
Ab s t r a c t : An Un i t a r y E S P RI T a l g o it r h m f o r t h e e s t i ma t i o n o f Di r e c t i o n— o f — a r r i v a l a n g l e s i S p r o p o s e d, a n d t h e r e c e i v i n g a r r a y i s a p l a n a r a r r a y wi t h s y mme t i r c a l l y d i s t r i b u t e d s e n s o r s . Di f f e r e n t f r o m
基于 U n i t a r y — E S P R I T 算法的二维 D OA估计
张远 安 , 董 国, 张艳艳
( 西安电子工程研究所, 西安 7 1 0 1 0 0 )
摘 要 : 提 出了一种采用酉 E S P R I T( U n i t a r y —E s t i ma t i o n o f S i g n a l P a r a me t e r s v i a R o t a t i o n l a I n v a i f a n t T e c h n ‘ 1 q u e , U —
采用小波分析和TLS-ESPRIT的DOA估计算法
采用小波分析和TLS-ESPRIT的DOA估计算法黄宇;柏正尧;黄振;董亮【期刊名称】《计算机仿真》【年(卷),期】2015(032)005【摘要】在阵列信号精度优化算法的研究中,针对传统波达方向(Direction of Arrival,DOA)估计算法在低信噪比条件下性能表现不佳的问题,本文提出了一种采用小波分析与TLS-ESPRIT相结合的DOA估计联合算法.该算法首先对强噪声背景下阵列天线所接收的观测信号进行小波分析,选取高频小波系数置零的强制消噪方式进行降噪处理;继而将预处理后的观测矩阵用TLS-ESPRIT方法进行DOA估计.理论分析和仿真结果均表明:在相同快拍数和阵元数的情况下,较之传统的DOA估计方法,联合算法具有更低的信噪比门限,并且能实现更为准确的DOA估计.【总页数】4页(P209-212)【作者】黄宇;柏正尧;黄振;董亮【作者单位】云南大学信息学院,云南昆明650091;云南大学信息学院,云南昆明650091;云南大学信息学院,云南昆明650091;中国科学院云南天文台,云南昆明650011【正文语种】中文【中图分类】TN911.7【相关文献】1.一类非高斯噪声干扰信号的广义TLS-ESPRIT谱估计算法 [J], 徐大纹;吴涛;许瑾2.一种基于互模糊函数分段相干累加的TDOA/FDOA参数快速估计算法 [J], 张威;张更新;边东明3.一种基于二阶互模糊函数的TDOA/FDOA联合参数估计算法 [J], 张柏林;王龙;吴宏超4.基于四阶互模糊函数的TDOA/FDOA联合参数估计算法 [J], 张柏林;王龙;吴宏超5.基于最小1-范数准则模糊函数的联合\rTDOA/FDOA估计算法 [J], 梁加洋;赵拥军;赵闯因版权原因,仅展示原文概要,查看原文内容请购买。
DOA——ESPRIT算法

DOA——ESPRIT算法相位phei = 2*pi*f*d*sind(theta),因此理论上来讲测向的算法都可以⽤来测频。
ESPRIT:Estimating signal parameters viarotational invariance techniques,中⽂为旋转因⼦不变法。
ESPRIT⽤于测频:%Example_espritclear all;clc;close all;N=200; %signal lengthm = N/2;L=N-m;s_amp=[1.31*exp(1i*pi/4),2.07*exp(1i*pi/3),1.88*exp(1i*pi/5)];s_omega=[0.12*pi,0.37*pi,0.72*pi];eps_sigma=0;sigma=0.5;x=zeros(1,N);%initializew = sqrt(sigma)*randn(1,N);n = [1:N];for slen=1:length(s_omega)x = x+s_amp(slen)*exp(1j*s_omega(slen)*n) ;endx=x+w;for n = 1:LX(:,n) = x(n:(n+m-1));endfor n = 1:LY(:,n) = x((n+1):(n+m));end%Rxx\RxyRxx = 0;for i = 1:LRxx = Rxx+X(:,i)*X(:,i)';endRxx = Rxx/L;Rxy = 0;for i = 1:LRxy = Rxy+X(:,i)*Y(:,i)';endRxy = Rxy/L;[A,B] = eig(Rxx);var = min(diag(B));I = eye(m);Z = diag(ones(1,m-1),-1);Cxx = Rxx - I*var;Cxy = Rxy - Z*var;[~,B] = eig(Cxx,Cxy);f=angle(diag(B));[~,fpos]=sort(abs(abs(diag(B))-1));f=f(fpos);fval=f(f>0);omega_est=sort(fval(1:length(s_amp)));disp('结果对⽐:')[omega_est,s_omega']ESPRIT⽤于测向:clear allclfset(0,'defaultaxesfontsize',22);M=12;Nb=32;P=3;%angles=[25 80 135]*(pi/180);angdeg=[80 90 115];angles=angdeg*(pi/180);dlambda=0.5;%generate random bits of informationpoles=zeros(1,P);X=zeros(M,Nb);Rideal=zeros(M,M);for k=1:P,mu=pi*cos(angles(1,k));poles(1,k)=exp(j*mu);a=exp(j*mu*(0:M-1)).';Rideal=Rideal+a*a';br=ones(1,Nb);temp=rand(1,Nb);br(find(temp<.5))=-1;bi=ones(1,Nb);temp=rand(1,Nb);bi(find(temp<.5))=-1;b=br+j*bi;X=X+a*b;end%add some noiseX=X+0.6*(randn(M,Nb)+j*randn(M,Nb));Rxx=X*X'/Nb;[E,D,V]=svd(Rxx);%ESPRIT algorithm:Es=E(:,1:P);Es1=Es(1:M-1,:); Es2=Es(2:M,:);Psi=Es1\Es2;[T,Phi]=eig(Psi);Phivec=diag(Phi);%plot eigenvalues from ESPRIT and compare with true frequencies polar(0,1,'.')hold onplot(real(poles),imag(poles),'kx','MarkerSize',12,'Linewidth',2);plot(real(Phivec),imag(Phivec),'ro','MarkerSize',12,'Linewidth',2); hold offlegend('True "poles"','ESPRIT eigenvalues')。
基于TLS-ESPRIT的改进空间平滑相干信号DOA估计算法

基于TLS-ESPRIT的改进空间平滑相干信号DOA估计算法胡爽;黄鹏;蒋凯;李良荣【期刊名称】《智能计算机与应用》【年(卷),期】2023(13)1【摘要】由于噪声的存在,现有的相干信号波达方向估计算法在低信噪比、小快拍数和小信号间隔条件下,性能下降严重。
针对这一问题,本文提出一种基于总体最小二乘法——旋转不变子空间(Total Least Squares-Estimating Signal Parameter via Rotational Invariance Techniques,TLS-ESPRIT)算法的改进前后向空间平滑方法,对相干信源波达方向(Direction of Arrival,DOA)进行估计。
该方法利用了信号的强相关性和噪声的弱相关性,通过时空相关协方差矩阵重构平滑后的阵列协方差矩阵,并将得到的新协方差矩阵应用于TLS-ESPRIT算法进行DOA估计。
通过与其他几种传统的解相干算法建模仿真对比,该算法在相干源之间的DOA距离较近、信噪比(Signal Noise Ratio,SNR)较低和快拍数较小的情况下可以更好地估计波达方向,且具备更高的分辨率和精度。
【总页数】6页(P208-212)【作者】胡爽;黄鹏;蒋凯;李良荣【作者单位】贵州大学大数据与信息工程学院;北京航空航天大学电子信息工程学院【正文语种】中文【中图分类】TN911.7【相关文献】1.基于虚拟阵列空间平滑的相干信号DOA估计2.基于空间平滑MUSIC算法的相干信号DOA估计3.基于改进TLS-ESPRIT算法的相干定位信号波达方向空间平滑4.基于互质阵虚拟阵列空间平滑的相干信号DOA估计方法因版权原因,仅展示原文概要,查看原文内容请购买。
基于TLS-CS的外辐射源雷达超分辨DOA估计方法
犛狌狆犲狉狉犲狊狅犾狌狋犻狅狀犇犗犃犲狊狋犻犿犪狋犻狅狀犿犲狋犺狅犱狅犳狆犪狊狊犻狏犲 犫犻狊狋犪狋犻犮狉犪犱犪狉犫犪狊犲犱狅狀犜犔犛犆犛
在 外 辐 射 源 雷 达 系 统 中 ,阵 列 信 号 的 波 达 方 向 (direction ofarriving,DOA)估计是目标定位 过 程 中 一 个 非 常 重 要 的 环节。通常,阵列天 线 接 收 到 来 自 目 标 反 射 的 回 波 信 号 能 量远低于来自辐射源的强直达波和经地面及建筑反射的多 路径杂波以及噪 声 信 号,很 难 直 接 对 目 标 进 行 测 向。 为 实 现在外辐射源雷达系统中目标的测向,文献[6]提 出 首 先 在 每个阵元上利用时域干扰相消算法抑制该阵元接收回波信 号中的强直达波和多径杂波;然后利用 距 离 多 普 勒 二 维 相 关处理提 高 目 标 回 波 信 号 的 信 噪 比 (signaltonoiseratio,
ZUO Luo1,WANGJun1,CHEN Gang1,DENG Yaqi1,WEN Yuanyuan2
(1.犖犪狋犻狅狀犪犾犔犪犫狅狉犪狋狅狉狔狅犳犚犪犱犪狉犛犻犵狀犪犾犘狉狅犮犲狊狊犻狀犵,犡犻犱犻犪狀犝狀犻狏犲狉狊犻狋狔,犡犻’犪狀710071,犆犺犻狀犪;2.犖犪狋犻狅狀犪犾犓犲狔 犔犪犫狅狉犪狋狅狉狔狅犳犛犮犻犲狀犮犲犪狀犱犜犲犮犺狀狅犾狅犵狔狅狀犛狆犪犮犲犕犻犮狉狅狑犪狏犲,犆犺犻狀犪犃犮犪犱犲犿狔狅犳犛狆犪犮犲犜犲犮犺狀狅犾狅犵狔,犡犻’犪狀710071,犆犺犻狀犪)
基于扩展ESPRIT的随机阵列高效DoA估计算法

基于扩展ESPRIT的随机阵列高效DoA估计算法刘松;庞育才【摘要】获得随机阵列的高效、统计无偏波达方向(DoA)估计是超分辨率DoA估计领域的一大挑战.该文基于“利用旋转不变技术扩展估计信号参数法(AESPRIT)”提出了一种随机阵列DoA估计算法.该算法将AESPRIT改造成闭合环结构,并使用阵列内插技术(AIT)提供的角度粗估计作为初始相位补偿角,从而通过迭代快速获得精确的DoA估计.所提算法直接给出代数形式的估计结果,具有低的计算复杂度;同时由于不存在流形映射或者模式截断误差,估计结果具有统计无偏性.仿真结果验证了所提算法的有效性.【期刊名称】《电子与信息学报》【年(卷),期】2019(041)006【总页数】6页(P1324-1329)【关键词】阵列信号处理;波达方向估计;随机阵列;利用旋转不变技术扩展估计信号参数法;阵列内插技术【作者】刘松;庞育才【作者单位】重庆邮电大学通信与信息工程学院重庆400065;重庆邮电大学通信与信息工程学院重庆400065【正文语种】中文【中图分类】TN911.71 引言波达方向(Direction-of-Arrival, DoA)估计技术在雷达、声呐、通信以及其它目标定位[1—5]所涉及的领域有着广泛的应用。
随机阵列又称为非规则阵列,基于随机阵列的DoA估计有着重要的理论和应用研究价值:阵元位置的随机化能消除规则阵列稀疏化所带来的DoA估计角度模糊性问题[6],而稀疏化的阵列具有较大的有效阵列孔径,并且能减少天线阵元之间的电磁互耦效应;理论研究显示能获得最优期望克罗美劳限(Expected Cromer Rao Bound, ECRB)的阵列具有非规则结构[7];此外,随机阵列DoA估计方法能用于共形阵列。
超分辨率DoA估计算法由于出色的分辨能力而被广泛研究,规则阵列如均匀线阵(Uniform Linear Array, ULA)的DoA估计技术研究最为成熟[8],但快速、统计无偏地获得随机阵列的超分辨率DoA估计仍面临较大的挑战。
整理基于ESPRIT算法的DOA估计
基于测量的QoS参数估计及其应用整理表姓名:职业工种:申请级别:受理机构:填报日期:A4打印/ 修订/ 内容可编辑基于测量的QoS参数估计及其应用赵斌, 刘增基, 李晓濛(西安电子科技大学综合业务网国家重点实验室,陕西西安710071)E-mail:zbnew@摘要:提出了一种基于测量的QoS参数估计方法,该方法使得用户无须事先为业务源建立相应的业务模型并向网络提交其业务模型参数,而是通过对业务流的统计特性进行实时测量来动态估计相应的QoS参数,从而克服了基于模型QoS参数估计方法所固有的缺陷,便于网络进行连接允许控制和带宽的动态分配.关键词:QoS;测量;连接允许控制中图法分类号:TP393文献标识码:A未来宽带网络的成功在很大程度上依赖于其对各种类型业务(如语音、视频和数据)的统计的复用性能.由于不同类型的业务具有不同的业务特性和服务质量(QoS)要求,这就要求网络能够提供相应的机制,以便在高效地提高资源利用率的同时确保不同类型业务的QoS,而如何精确地估计Q o S参数则是其中一个十分重要的问题.在传统的QoS参数估计方法中,通常要求用户提供描述其业务模型(如ON/OFF模型、马尔可夫调制泊松过程和马尔可夫调制流体过程等)的参数,网络则根据相应链路上各业务流的模型参数以及链路容量和缓冲区大小来估计相关的QoS参数,这种方法通常被称为基于模型的QoS参数估计方法.然而,基于模型的QoS参数估计方法明显存在着以下一些缺陷:(1) 业务源实际的统计特性很难被一种业务模型精确地进行描述.(2) 受标准化的限制,用户所能提交的业务量描述符不足以用来对其业务模型进行描述.(3) 在网络内部,由于排队的影响,可能会使业务流的统计特性发生变化,从而不再与用户在连接建立阶段所提交的业务量描述符相一致.本文利用大数量业务源复用渐进分析理论提出了一种基于测量的QoS参数估计方法,该方法无须用户事先为业务源建立相应的业务模型并向网络提交其业务模型参数,而是通过对业务流的统计特性进行实时测量来动态估计相应的QoS参数,从而克服了基于模型QoS参数估计方法所固有的缺陷.本文将针对ATM网络进行讨论,并分析如何将其应用于连接允许控制(connection admission control,简称CAC)和带宽的动态分配.由于信元的最大排队时延通常可以由缓冲区的大小来限定,因此本文主要讨论的是对信元丢失率(cell loss ratio,简称CLR)的估计.大数量业务源复用渐进分析理论在ATM网络中,除非一些非常简单的业务模型,利用传统的排队论进行排队性能分析通常是十分困难的,因此人们开始考虑采用渐进分析的方法,其中大数量业务源复用渐进分析理论则是近年来提出的一种十分有效的方法[1~3].考虑一个ATM 复用器,其服务速率为C ,缓冲区容量为无限,被N 个相互独立的业务源复用.这N 个业务源分成J 类,同类业务源之间服从独立同分布原则,且每类业务源的个数为N j =N *ρj ,j =1,2,…,J .令X j [0,t ]为一个属于第j 类的业务源在时间间隔[0,t ]中所产生的信元数,则其log 矩母函数为 ϕj (θ)=1t logE[e θX j [0,t]]. (1) 而各业务源相应的累积log 矩母函数可以表示为ϕ(θ)=∑ρj ϕj (θ)J j=1.(2)令L 为系统稳态队长,且令Q [Nc ,Nb ,N ]为系统的溢出概率,即Q [Nc ,Nb ,N ]=Pr [L >B ],其中,Nc =C ,Nb =B ,则利用大数量业务源复用渐进分析理论可得:limN→∞1NlogQ(Nc,Nb,N)=−I(b). (3)因此当N 较大时,我们可以得到 logQ(Nc,Nb,N)≈−NI(b), (4) 其中I(b)=inf t(tϕ)(b +ct).(5)上式中,f (x)=sup y[xy −f(y)],称为函数f (x )的Legendre -Fenchel 变换.式(3)成立的条件是,当N 趋于无穷大时,式(2)对于任何t 均存在.由于业务源一般都满足这一条件,因此大数量业务源复用渐进分析理论具有较强的适用性. 信元丢失率由于在有限容量缓冲区系统中CLR 的求解通常十分困难,因此许多文献在分析ATM 网中的信元丢失率时,常常用无限容量缓冲区系统的队长尾部分布(即溢出概率)来近似有限容量缓冲区(容量为B )系统中的CLR,本文中即CLR ≈Q [Nc ,Nb ,N ],然而这种近似方法有时却会导致较大的误差.这里我们采用了一种更精确的CLR 估计方法.考虑一个具有有限容量缓冲区(容量为B )的排队系统S 和一个具有无限容量缓冲区的排队系统S ∞,L 和L ∞分别为S 和S ∞的系统队长,则系统S ∞的溢出概率为Pr(L ∞>B ),而系统S 中的信元丢失率可以表示为CLR =E {[λ(t)−C]+|L=B }Pr(L=B)E[λ(t)],其中(x )+=max(x ,0),λ(t )为各业务源累积的到达速率,C 为服务速率.图1比较了在同样的信元到达情况下,S 和S ∞缓冲区的占用过程.如图1所示,由于在有限容量缓冲区排队系统S 中存BSlot②Queue length①LL ∞ L ∞L在着当缓冲区满时便丢弃信元的现象,因此有Pr (L =B )≤Pr (L ∞>B ).我们可以利用下式来对CLR 进行估计,即CLR ≈E {[λ(t)−C]+|L ∞>B }E[λ(t)]Pr(L ∞>B). (6)由式(4)我们可以得到Pr (L ∞>B)=Q(Nc,Nb,N)≈e −NI(b). (7)在文献[4]中,给出了E {[λ(t)−C]+|L ∞>B }E[λ(t)]的一种近似解,即E {[λ(t)−C]+|L ∞>B }E[λ(t)]≈√2πe (C−μ)22σ2+(μ−C)+μ, (8)其中μ=∑μi i ,σ2=∑σi 2i ,μi 和σi 2分别为第i 个业务源的平均到达速率和速率方差.考虑到在一个无限容量缓冲区的排队系统中,为了满足稳态条件,要求各业务源的累积平均到达速率应小于系统的服务速率,即μ<C ,此时,(μ-C )+=0.因此,利用式(6)~式(8)可以得到 CLR ≈√2πμ(C−μ)22σ2−NI(b). (9)若令K =√2πμe(C−μ)22σ2,则CLR 可以表示为CLR ≈Ke −NI(b).(10)对于VBR(variable bit rate)业务源来说,通常情况下K 的取值远小于1,我们比较式(10)和式(7)可以发现,信元丢失率CLR 通常小于溢出概率,因此当我们利用式(10)进行CLR 估计,并将其应用到相应的流量控制(如连接允许控制CAC)和带宽分配时,往往能够获得更好的统计复用增益. 基于测量的QoS 参数估计本文通过对业务流的统计特性进行测量,并将测得的统计值代入式(9)来估计相应的QoS 参数.根据式(9),为了得到相应的CLR,需要通过测量确定以下一些统计值,即各业务源累积的平均到达速率μ和速率方差σ2,以及各自的log 矩母函数ϕj (θ), j =1,2,…,J .我们把时间轴用固定的时间间隔t (几十微秒到几百毫秒)等分为连续的时间段,每个时间段为一个测量周期,我们在每个测量周期内测量各业务源到达的信元个数,若测量时间为T (通常由几百个测量周期组成),则一个第j 类业务源在第i 个时间段内被测量到的信元到达个数可记为X j [(i -1)t ,it ],i =1,2,…,T /t .利用这些测量值,我们可以分别求出相应的μ,σ2及ϕj (θ),并最终求得该测量时间内的CLR.(1) μ和σ2.令μj 和σj 2分别为第j 类业务源的平均到达速率和速率方差,则它们可以利用下式来进行估计,μj =1T t ⁄∑X j [(i −1)t,it]T t⁄i=1.(11)σj 2=1(T t ⁄)−1∑[X j [(i −1)t,it]−μj ]2T t ⁄i=1.(12)由于各业务源是相互独立的,且同类业务源之间服从独立同分布原则,因此可得μ=∑N j μj J j=1, σ2=∑N j σj 2Jj=1.(13)(2) ϕj (θ).由于ϕj (θ)=1t logE[e θX j [0,t]],为了计算ϕj (θ),我们采用时间平均来替代该式中的统计平均(数学期望),即ϕj (θ)=1t log [1T t ⁄∑e θX j [(i−1)t,it]T t ⁄i=1], j =1,2,…,J . (14)(3) CLR.根据式(9),为了得到CLR,还需要求解I (b ).而由式(5)可知,I (b )是一个求解极小值和极大值的表达式,即I(b)=inf t(tϕ)(b +ct)=inf tsup θ[θ(b +ct)−t ∑ρj ϕj (θ)Jj=1].(15)上式的求解包含了两个优化计算的过程,一个是对于固定的t 改变θ,求θ(b +ct)−t ∑ρj ϕj (θ)Jj=1的极大值,将其记为f *(t );另一个是改变t ,求f *(t )的极小值. 基于测量的QoS 参数估计在连接允许控制中的应用利用上述基于测量的QoS 参数估计方法,我们可以得到一种基于测量的CAC 算法.类似地,我们把时间轴用固定的时间间隔T 等分为连续的时间段,每个时间段为一个更新周期.同时,在每个更新周期中又用更小的时间间隔t (几十微秒到几百毫秒)进行等分,每个小时间段即为一个测量周期,一个更新周期通常由几百个测量周期组成.在一个更新周期中,我们测量每个测量周期内各业务源到达的信元个数,如一个第j 类业务源在第i 个测量周期内被测量到的信元到达个数可记为X j [(i -1)t ,it ],i =1,2,…,T /t .假设用户所要求的QoS 为CLR<ε,根据式(9),我们可以估计在任一给定的服务速率C 下的信元丢失率,因此在给定的信元丢失率要求下,为了确保QoS 所应分配的最小带宽,可定义为 C mes =min{C :CLR<ε},(16)即C mes =min {C:σ√2πμe(C−μ)22σ2−NI(b)<ε}.由于该式将利用上述的测量值来进行求解,因此我们称其为测量带宽. 结合以上分析,我们得到如下一种基于测量的CAC 算法,如图2所示.C newC Service rateBandwidth allocated②A new connection arrives (required bandwidth C new )③C mesDetermine ④:C new <C -C mesAccept⑤C 'mes A new connection arrives (required bandwidth C 'new )Determine:C 'new <C -C 'mesReject⑥(1) 在每一个更新周期的测量周期内测量各业务源到达的信元个数,并在每一个更新周期的结束时刻利用所测量的结果计算该更新周期的测量带宽.(2) 在一个更新周期中,当第1个新的连接建立请求到达时,利用其业务量描述符计算该连接所需带宽,记为C new(例如可以使C new为该新连接的峰值速率).假设系统的服务速率为C,上一更新周期的测量带宽为C mes,则系统当前剩余带宽C剩余=C-C mes.此时判断,若C new <C剩余,则接纳该连接请求,并更新C剩余=C剩余-C new;否则,则拒绝该连接请求.(3) 在该更新周期中,当又有新的连接建立请求到达时(其所需带宽为C new),判断若C new<C剩余,则接纳该连接请求,并更新C剩余=C剩余-C new;否则,拒绝该连接请求.(4) 在该更新周期的结束时刻,利用该更新周期的相应测量值计算其测量带宽C mes,在下一个更新周期中,令系统剩余带宽C剩余=C-C mes.如图2所示,在上述基于测量的CAC算法中,带宽的分配是一种动态的过程,这种动态过程表现为在每一个更新周期的结束时刻,测量带宽被重新计算并用于下一个更新周期的接纳控制,以便获得更好的统计复用增益,提高网络资源利用率.在上述基于测量的CAC算法中,一个关键的问题在于如何利用测量值来计算更新周期的测量带宽.利用第4节的方法,我们可以估计在任一给定C下的信元丢失率,因此根据式(16),我们可以调节式中的C,直到恰好满足CLR<ε,则此时的C即为C mes.数值结果图3给出了在复用多个VBR业务源时,利用我们的方法(式(9))得到的缓冲区容量与信元丢失率CLR之间的对应关系,并将其与溢出概率(式(7))及CLR仿真结果进行了比较,对式(9)中CLR 和式(7)中溢出概率的求解均采用了我们上面所描述的测量方法来进行,两者的区别是相差了一个系数K.我们采用的业务源是一种在ATM网络性能分析中被广泛采用的真实的业务源,即星球大战MPEG-1视频压缩流序列[5].在图3(a)中,链路容量C=34Mbps,业务强度ρ=0.85;图3(b)中,链路容量C=155Mbps,业务强度ρ=0.95.Log(probability)-1-2-3-4-5Overflow probabilityCLR(measurement)①概率,②溢出概率(测量),③仿真,④缓冲区容量.(a)C =34Mbps,ρ=0.85(b) C =155Mbps,ρ= 0.85Fig.3 图3从图3可以看出,测量的溢出概率与实际的CLR 相比高出了2~3个数量级,而测量的CLR 则与实际的CLR 十分接近,两者相差不超过一个数量级,因此与溢出概率相比,采用式(9)进行CLR 估计可以得到更为精确的结果.此外,从图中还可以看出,当缓冲区容量较小时,测量的CLR 值随着缓冲区的增加而快速下降,但当缓冲区容量增加到一定量之后,进一步增加缓冲区容量只对CLR 的改善产生较小的影响,这一现象表明,本文的方法能够用来描述信元级和突发级两级的排队行为,便于网络进行相应的流量控制.我们针对链路利用率比较了两种基于测量的CAC 算法的性能,一种是本文的CAC 算法;另一种是利用溢出概率(式(7))来近似CLR 的CAC 算法,我们称其为溢出概率近似法.该算法与本文CAC 算法的不同之处在于,将式(16)中的CLR 替换为溢出概率,其余不变.在这里,我们使用的VBR 业务源仍是星球大战MPEG -1视频压缩流序列,我们定义链路利用率ρ=NμC,其中C 为服务速率,μ为业务源平均速率,N 为CAC 所允许的最大连接数.假设所要求的QoS 为CLR<10-6,服务速率C 分别为34Mbps(见表1)和155Mbps(见表2).表1和表2给出了在不同的缓冲区容量下,各CAC 算法的链路利用率.本文的CAC 算法的性能与仿真结果十分接近,它明显优于溢出概率近似法,这是因为本文的CAC 算法采用了更为精确的信元丢失率的估计方法(式(9)),从而能够获得更好的统计复用增益,提高网络资源的利用率.Table 1 Link utilization (CLR<10-6,C =34M) 表1 链路利用率(CLR<10-6,C =34M)Buffer size ①B (ms)48 10 15 20 Overflow probability approximation ②0.517 0.588 0.625 0.708 0.760 CAS in this paper ③0.616 0.689 0.755 0.805 0.808 Simulation ④0.6350.7040.7630.8100.813①缓冲区容量,②溢出概率近似法,③本文CAC,④仿真.Table 2 Link Utilization (CLR<10-6,C =155M) 表2 链路利用率(CLR<10-6,C =155M)Overflow probability (measurement)②Buffer size ④B (ms)CLR(measurement)CLR(simulation ③)L o g(p r o b a b i l i t y ①)51015 20 25 303540-6 -5 -4 - -2 -Buffer size B(ms)48101520 Overflow probability approximation0.8000.8800.8840.8890.892 CAS in this paper0.8620.9010.9080.9140.914 Simulation0.8830.9190.9200.9210.921 References:1.Botvich, D.D., Duffield, N.G. Large deviations, economies of scale, and the shape of theloss curve in large multiplexers. Queueing Systems, 1995,20(3):293~320.2.Duffield, N.G. Economies of scale in queues with sources having power-law largedeviation scalings. Journal of Applied Probability, 1996,33(3):840~857.3.Courcoubetis, C., Weber, R. Buffer overflow asymptotics for a switch handling many trafficsources. Journal of Applied Probability, 1996,33(3):886~903.4.Song, J., Boorstyn, R. Efficient loss estimation in high speed networks. In: Proceedings ofthe IEEE ATM Workshop’98. 1998. 360~367.5.Rose, O. Traffic modeling of variable bit rate MPEG video and its impacts on ATMnetworks [Ph.D. Thesis]. Institute of Computer Science, Wuerzburg University, 1997.Estimation of QoS Parameters Based on Measurement and Its ApplicationZHAO Bin, LIU Zeng-ji, LI Xiao-meng(National Key Laboratory of Integrated Service Network, Xidian University, Xi’an 710071, China)E-mail: zbnew@Abstract:A method for estimating QoS parameters based on measurement is presented in this paper. This method does not require the users to establish any models describing the statistics of the traffic and provide model parameters to the network in advance. Instead, network monitors and measures the incoming traffic statistics, and estimates QoS parameters based on the measured statistics, which enable it to overcome the drawbacks of model-based QoS parameters estimation and be convenient for connection admission control and dynamic bandwidth allocation in networks.Key words:QoS; measurement; connection admission control整理丨尼克本文档信息来自于网络,如您发现内容不准确或不完善,欢迎您联系我修正;如您发现内容涉嫌侵权,请与我们联系,我们将按照相关法律规定及时处理。
基于循环累积量的TLS-ESPRIT测向算法
基于循环累积量的TLS-ESPRIT测向算法孙建设;张玉;邓小波【摘要】This paper describes the mathematic model of TLS-ESPRIT algorithm and the definition and properties of fourth order cumulant,and a novel TLS-ESPRIT algorithm based on cyclic fourth order cumulant is proposed. The performance figures of the novel TLS-ESPRIT algorithm and common TLS-ESPRIT are obtained by computer simulation,and the simulation results show that this new algorithm can get rid of not only Gaussian color noise but also the interference in different cyclic frequency. The operation time for the same operation by using different DOA algorithms is simulated, and the simulation results show that this algorithm has lower computational complexity.%描述了普通 TLS-ESPRIT算法的数学模型和4阶累积量的定义及性质,提出了一种基于4阶循环累积量的TSL-ESPRIT算法。
使用计算机进行仿真试验,得出了该算法与普通TLS-ESPRIT 算法在色噪声和干扰情况下的性能图样,验证了该算法能够有效地克服高斯色噪声和不同循环频率处干扰的影响,仿真了该算法与传统测向算法对同一问题的运算时间,证明该算法的运算量较小。
基于修正ESPRIT算法的二维DOA估计
第 2 9卷第 4 期
20 0 8年 4 月
哈
尔
滨工程ຫໍສະໝຸດ 大学学报
Vo . 9 № . 12 4
Ap . 0 8 r2 0
J u n l fHa bn En ie rn ie st o r a r i g n e ig Unv r i o y
干能力 , 在双排平行均匀线阵的基 础上 , 介绍了一种二维修正 E P I S R T算法. 通过对 子阵的合并 , 弃了原协方差矩 摒 阵 中的冗余数据 , 使得新构成的协方差矩阵 的维数 比原来下 降了近 3 , 而降低 了特征值分解 的维数 , 3 从 并且 新构
成 的协 方 差 矩 阵 可 以 对接 收 数 据 进 行 共 轭 重 排 再 利 用 . 论 分 析 和 仿 真 实 验 表 明 , 算 法 降 低 了计 算 量 , 高 了 对 理 该 提
2 D 一 DOA s i a i n b s d o o ii d ES e tm to a e n a m d fe PRI a g r t m T l o ih
DI O i g A M n ,W U a — in ZHAN G n Xioq a g, Pe g
非相干信号的估计准确度 , 同时具有一定的解相干能力. 关键词 : 修正 E P I S R T算法 ; 二维 D A估计 ; O 相干信源
中 图分 类 号 : N9 1 7 文 献 标 识码 : T 1. A 文章 编 号 :0 674 (0 8 0—4 70 10 —0 3 20 )40 0 —4
lr e u e h i n in f h ie v led cmp s in al rd cs edme s so ee n au eo oi o ,mo ev r h O jg t aacnb e sd y t o t g t ro e,teC nu aed t a eru e 【
基于ESPRIT算法的柱面共形阵列天线DOA估计

第33卷 第8期系统工程与电子技术Vol.33 No.82011年8月Systems Engineering and Electronics August 2011文章编号:1001 506X(2011)08 1727 05收稿日期:2010 06 03;修回日期:2011 04 27。
基金项目:国家自然科学基金(60601016);陕西省基础研究基金(2010J Q8003)资助课题作者简介:齐子森(1982 ),男,博士研究生,主要研究方向为高分辨空间谱估计技术。
E mail:qizisen@基于ESPRIT 算法的柱面共形阵列天线DOA 估计齐子森,郭 英,王布宏,霍文俊(空军工程大学电讯工程学院,陕西西安710077)摘 要:由于共形天线阵列流形的多极化特性(polarization diversity,PD),信源方位参数与极化状态的 耦合 是实现共形阵列天线波达方向(direction of arrival,DOA)估计的主要难点。
针对柱面共形阵列天线的特点,建立了柱面共形阵列天线的导向矢量模型;通过合理的阵元排列结构设计,结合ESPRIT (est imat ion of signal parameters via rotational invariance techniques)算法参数估计的特点,实现了信源极化状态与方位参数的去耦合,推导了ESPRIT 算法多参数估计的参数配对方法,最终提出了柱面共形阵列天线盲极化DOA 估计算法。
计算机Monte Carlo 仿真实验验证了所提算法的有效性。
关键词:柱面共形阵列天线;波达方向估计;ESPRIT 算法;参数配对中图分类号:T N 911.7 文献标志码:A DO I :10.3969/j.issn.1001 506X.2011.08.10DOA estimation for cylindrical conformal array antennabased on ESPRIT algorithmQI Zi sen,GUO Ying,WANG Bu hong ,H UO Wen jun(Telecommunication Engineering Institute,Air Force Engineering Univ ersity ,X i an 710077,China) Abstract:Due t o t he polarizat ion divers ity of conform al array manifold,t he coupling betw een polarizat ionparameters and bearings of source is t he distinct difficulty in direction of arrival (DOA )est im ation of conform al array antennas.In view of th e charact eristic of cylindrical c onform al array antennas,an array m anif old m odel for cylindrical conform al array is est ablished.Wit h t he help of w ell designed conf iguration of element s on cylindrical carriers and estimat ion of signal paramet ers via rot ational invariance t echniques (ES PRIT )algorithm,the decoupling met hod for DOA and polarization param eters is im plement ed.T he paramet ers pairing m ethod of E SPRIT is given w hen DOA of m ult iple sources is est im ated.On t his basis,a blind DOA estim at ion algorithm f or cylindrical conformal array antenna w it h respect to polarization diversit y is proposed.Monte C arlo simula t ion results are provided to dem onst rate t he effect iveness of the proposed method.Keywords:cylindrical conform al array antenna;direct ion of arrival est im ation;estimat ion of signal parameters via rotational invariance techniques (ESPRIT)algorithm;param eter m atching0 引 言共形阵列天线[1]在未来舰载、弹载雷达以及航天飞行器的天线设计中具有广泛的应用前景,它的诸多优点引起了国内外学者的广泛关注[2 11]。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
2
估计误差(角度)
1.5
1
0.5
0
0
5
10
15
20
25
30
阵元数L
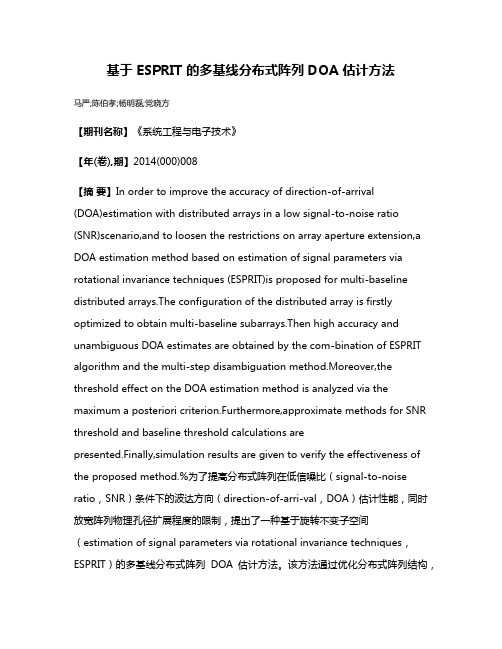
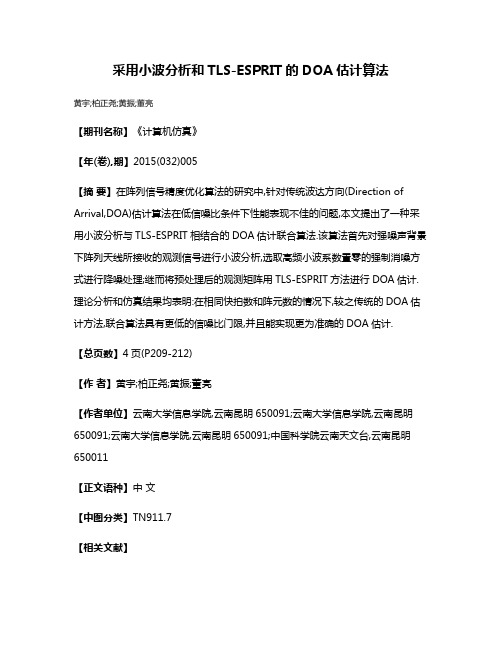
图3 阵元数 L 对估计误差的影响
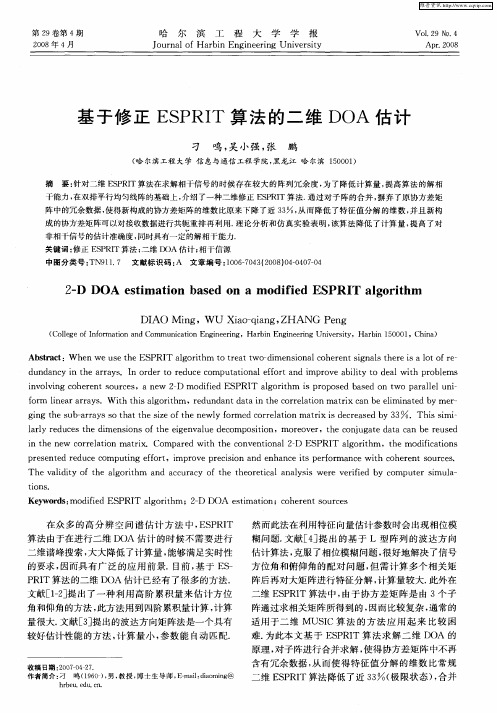
2.3 采样点数 N 对估计误差的影响分析 与 2.1 节类似,首先对采样点数 N 离散化取值,然后求得不同采样点数下的 误差,从而绘制出误差随采样点数改变的函数曲线如图 4 所示,图 4 中采样点数 从 10 取到 200,间隔为 5,运行次数为 100 次,其余条件如题中所述。由图 4 可知,随着采样点数的增加,估计误差会越来越小,即估计精度会越来越高。
作者:胡斌(Author:xiao5) 2012-5-5!QQ:2262058730
基于 TLS-ESPRIT 算法的 DOA 估计
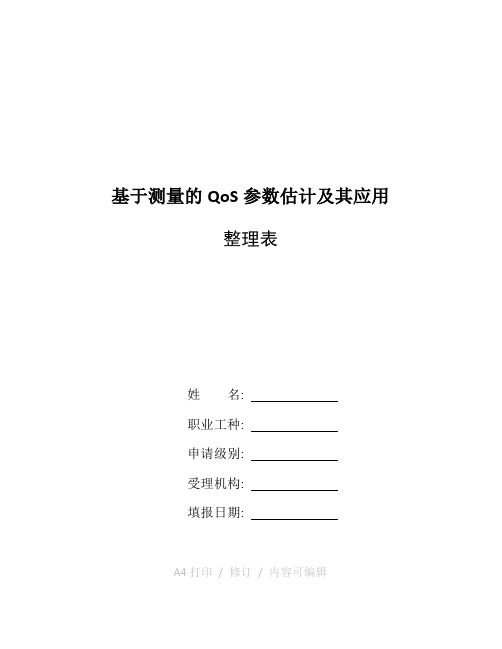
题目:考虑一个 8 阵元阵列,2 个输入信号, S1 :DOA 为 30 ,
s1 (t ) exp{ j1t} , 1t / 4 , S2 : DOA 为 60 , s2 (t ) exp{ j2t} , 2 t / 6 , t t0 , t1 , , t N 1 , N=100, tn nt , (n 0,1,..., N 1) , SNR=5dB,采用
附件:
%%%%%本文件名为 drawTLSesprit.m %%%%% %%%%%分析基于总体最小二乘的 ESPRIT 算法(TLS-ESPRIT)的 DOA 估计的性能 %%%%% clear;clc;close all; %清除变量,清屏,关闭所有绘图窗口 % 调用格式:[estimated,error]=TLSesprit(p,L,K,SNR,DOA); % 估计结果(弧度,矢量:p 行 1 列):estimated % 估计误差(弧度,标量:均方误差):error % 信号个数:p % 阵元数:L % 快拍数:K % 信噪比:SNR % 波达方向(弧度,矢量:p 行 1 列):DOA % p=2; L=8; K=100; SNR=5; DOA=[pi*(-10/180) pi*(20/180)]; %%%%%显示估计结果%%%%%
8
作者:胡斌(Author:xiao5) 2012-5-5!QQ:2262058730
% [estimated,error]=TLSesprit(p,L,K,SNR,DOA); % errorm(k)=error; %将每次的估计误差存入变量 errorm 中,便于求 均值 % end % errorn(n)=sum(errorm)/M; %求多次运行后的估计误差的均值 % end % figure(4);plot(SNRn,errorn*180/pi,'r:*','LineWidth',2);%绘制曲线并适当标注(误差:角度) % xlabel('SNR');ylabel('估计误差(°)');title('SNR 对估计误差的影响'); % %结论:信噪比 SNR 越大估计越准确,但当信噪比 SNR 大到一定程度后则估计精度趋于 稳定 % %%%%%两信号之间的角度差(GAP)的大小对估计误差的影响分析%%%%% GAPn=0.1:0.1:5; %对两信号之间的角度差(GAP)离散化取值 for n=1:length(GAPn) GAP=GAPn(n); %每次循环只取其中一个值 DOA=[pi*(0/180) pi*(GAP/180)]; for k=1:M %M 为独立重复运行次数 [estimated,error]=TLSesprit(p,L,K,SNR,DOA); errorm(k)=error; %将每次的估计误差存入变量 errorm 中,便于求均值 end errorn(n)=sum(errorm)/M; %求多次运行后的估计误差的均值 end figure(5);plot(GAPn,errorn*180/pi,'r:*','LineWidth',2);%绘制曲线并适当标注(误差:角度) xlabel('GAP(°)');ylabel('估计误差(°)'); % title('两信号之间的角度差(GAP)对估计误差的影响'); %结论:GAP 越大估计越准确,但当 GAP 大到一定程度后则估计精度趋于稳定 % % %%%%%单个信号时,信号波达方向分布不同时对估计误差的影响分析%%%%% % DOAn=pi*(-80/180):(5/180):pi*(80/180); %对信号波达方向离散化取值(80 度到 90 度 时误差太大,因此未取) % for n=1:length(DOAn) % DOA=DOAn(n);p=1; %每次循环只取其中一个值,信号个数 p 设为 为1 % for k=1:M %M 为独立重复运行次数 % [estimated,error]=TLSesprit1(p,L,K,SNR,DOA); %调用 TLSesprit1 (一个信号的情 况) % errorm(k)=error; %将每次的估计误差存入变量 errorm 中,便于求 均值 % end % errorn(n)=sum(errorm)/M; %求多次运行后的估计误差的均值 % end % figure(6);plot(DOAn*180/pi,errorn*180/pi,'b:*','LineWidth',2);%绘制曲线并适当标注(误差: 角度) % xlabel('DOA(°)');ylabel('估计误差(°)');
2
作者:胡斌(Author:xiao5) 2012-5-5!QQ:2262058730
K+25,间隔为 1,运行次数为 100 次,其余条件如题中所述。由于阵元数 L 需大 于信号个数 K 才能正确估计,故取值中含有信号个数 K。由图 3 可知,随着阵元 数的增加,估计误差会越来越小,即估计精度会越来越高,但当阵元数大到一定 程度后,对估计精度的影响则会慢慢的减小。
4
作者:胡斌(Author:xiao5) 2012-5-5!QQ:2262058730
9 8 7 6
估计误差 (°)
5 4 3 2 1 0
0
0.5
1
1.5
2
2.5 GAP(°)
3
3.5
4
4.5
5
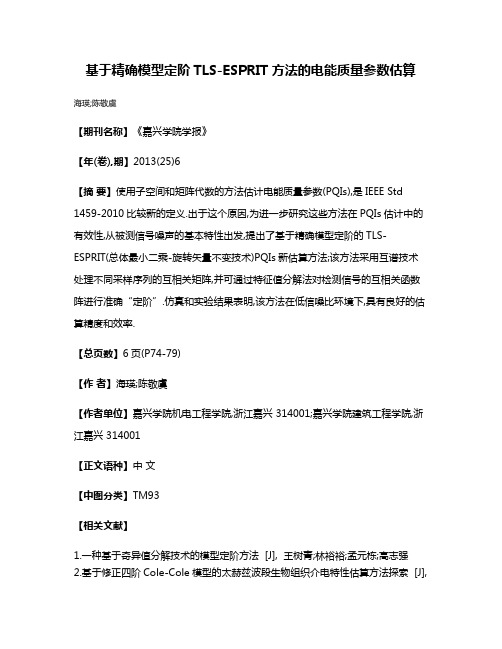
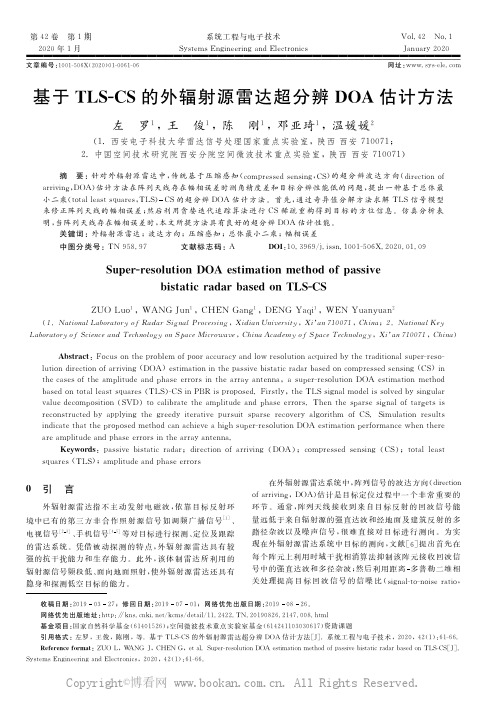
图5
两信号之间的角度差(GAP)对估计误差的影响
2.5 单信号 DOA 不同分布对估计误差的影响分析 信号波达方向(DOA)的取值区间为-90 度到 90 度,若只考虑只有一个信号 的情况,则当信号的 DOA 不同时,估计误差也会不一样。因此,为了分析不同 的 DOA 会对估计精度造成多大的影响,绘制不同 DOA 下的估计误差曲线如图 6 所示。处理方法与 2.1 节类似,图 6 中 GAP 从-80 度取到 80 度,间隔为 5 度, 独立运行次数为 100 次,其余条件如题中所述。由图 6 可知,DOA 越靠近 0 度估 计越准确,越靠近正负 90 度估计误差越大。且仿真结果表明,当 DOA 在正负 90 附近时,估计误差太大,因此,为了不影响估计结果显示效果,故在图中未绘制 正负 90 度附近的估计误差。
210
330
240 270
300
信号 DOA(度 ): 30
图1
60
基于 ESPRIT 算法的 DOA 估计结果
2 分析讨论
1
作者:胡斌(Author:xiao5) 2012-5-5!QQ:2262058730
主要分析各个参数对估计误差的影响,误差函数定义如式(1):
error 1 M
M
k 1
6
作者:胡斌(Author:xiao5) 2012-5-5!QQ:2262058730
6 R=R-Rn R 5
4
估计误差 (°)
3
2
1
0 -15
-10
-5 SNR(dB)
0
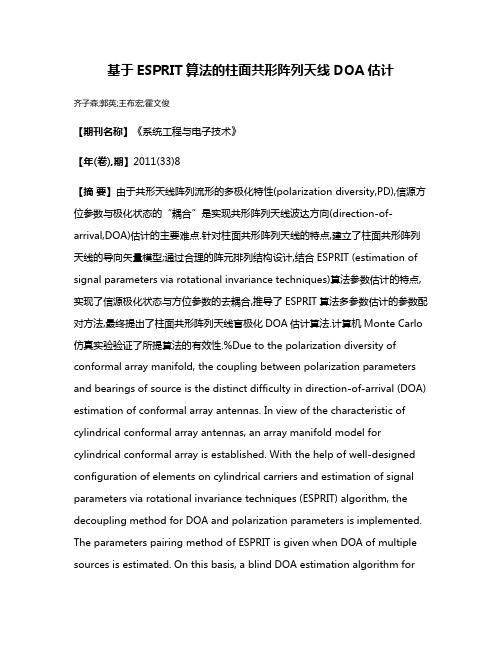
5
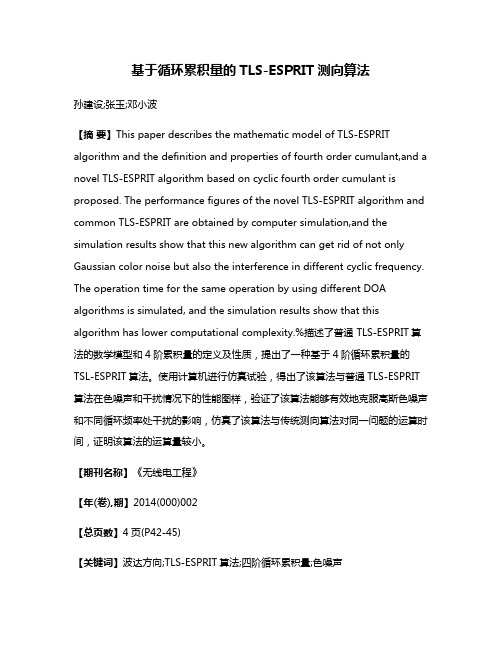
图7
减与不减 Rn 对估计误差的影响
参考文献:
[1] 何子述,夏威等.现代数字信号处理及其应用[M].北京:清华大学出版社,2009.5(1): 298-300.
7
作者:胡斌(Author:xiao5) 2012-5-5!QQ:2262058730
M=100; %设定独立重复运行次数 DOA=[pi*(0/180) pi*(30/180)]; %波达方向(弧度,矢量:p 行 1 列) p=length(DOA); L=8; K=100; SNR=5; %参数设置, [estimated,error]=TLSesprit(p,L,K,SNR,DOA); %函数调用 polar(estimated,[1 1],'r*'); %在极坐标中显示估计结果(必须先转化为弧 度) h=title('');set(h,'string',['TLS-ESPRIT: 估计值: ',num2str(estimated)]); h1=xlabel('');set(h1,'string',['信号 DOA(度): ',num2str(DOA*180/pi)]); % %%%%%阵元数 L 对估计误差的影响分析%%%%% % Ln=p+1:1:p+25; %阵元数 L 需大于信号个数 p 才能正确估计 % for n=1:length(Ln) % L=Ln(n); % for k=1:M % [estimated,error]=TLSesprit(p,L,K,SNR,DOA); % errorm(k)=error; %将每次的估计误差存入变量 errorm 中,便于求 均值 % end % errorn(n)=sum(errorm)/M; %求多次运行后的估计误差的均值 % end % figure(2);plot(Ln,errorn*180/pi,'r:*','LineWidth',2); %绘制曲线,并适当标注 % xlabel('阵元数 L');ylabel('估计误差(°)');title('阵元数 L 对估计误差的影响'); % % 结论:阵元数 L 越大估计越准确,但当 L 大到一定程度后则估计精度趋于稳定 % % %%%%%快拍数 K 对估计误差的影响分析%%%%% % Kn=10:10:200; %对快拍数离散化取值 % for n=1:length(Kn) % K=Kn(n); % for k=1:M % [estimated,error]=TLSesprit(p,L,K,SNR,DOA); % errorm(k)=error; %将每次的估计误差存入变量 errorm 中,便于求 均值 % end % errorn1(n)=sum(errorm)/M; %求多次运行后的估计误差的均值 % end % figure(3);plot(Kn,errorn1*180/pi,'r:*','LineWidth',2); %绘制曲线并适当标注 % xlabel('快拍数 K');ylabel('估计误差(°)');title('快拍数 K 对估计误差的影响'); % % 结论:快拍数 K 越大估计越准确,但当 K 大到一定程度后则估计精度趋于稳定 % % %%%%%信噪比 SNR 对估计误差的影响分析%%%%% % SNRn=-15:1:15; %对信噪比 SNR 离散化取值 % for n=1:length(SNRn) % SNR=SNRn(n); % for k=1:M