三维成像声纳论文
基于FPGA的高精度三维成像声呐系统
基于FPGA的高精度三维成像声呐系统
摘要:高精度三维成像声呐的实现需要完成大规模信号同步采集和海量数据并行计算,为此,提出基于现场可编程逻辑门阵列的并行计算系统。
在使用同源时钟的前提下,利用Spartan-3 对平面阵2304 路换能器信号进行同步采样,通过离散傅里叶变换降采样以减小采样数据规模,采用Virtex-5 重新计算换能器权重以降低运算量,使用分步的波束形成算法以减小系统所消耗的存储器规模,同时在PC上实现三维图像实时显示。
实验结果证明了该系统的可行性。
1 概述
高精度三维成像技术是目前水声设备研究的重要创新领域,在海底勘探、沉船打捞、海洋研究等领域都有重要应用。
目前研制高精度三维声呐成像系统需要克服的关键技术难点在于大规模换能器数据的同步采集和海量数据的并行计算所带来的巨大的硬件开销[1]。
为此,文献[2]提出使用稀疏矩阵换能器阵列,对平面阵内不同索引号的换能器进行权重分配,对权重为0 的换能器做忽略处理从而减少前端信号采集通道和后端的数据运算量。
从减少波束形成过程中参与并行运算矩阵的大小出发,文献[3]提出将大阵列进行多子阵划分,通过换能器发射机和接收机做一定的匹配设计,使用波束多级合成的办法形成最终的波束,也能做到减少运算量。
三维成像声纳

0.5°
20° 0.5m-120m 7-30Hz 8mm 35W 18-75VDC Ethernet(10/100 Base T)or VSDL(with Ethernet
Comms
1000Base available) Impulse as standard,Schilling option
Connector
300m 4000m 2500m 300m 300m 4000m
深度 级别 频率
720KHz
720KHz
240KHz
1.35MHz
2.25MHz
10K/800KHz
重量
3.9Kg
7.96Kg
19Kg
21.7Kg
19.1Kg
2Kg
扫描 扇区 接口
120°×20°
120°×20 °
120°×45°; 120°×1.5°
BV5000-1350船坞扫描
高
软件
15.4in
• Leica Cyclone Register • Leica Cyclone Model
15.4in
• Leica Cyclone Register Customer Care Package (CCP)
• Leica Cyclone Model Customer Care Package
1000Base
产品介绍
Gemini 720id
高频三维实时成像声纳 Gemini 720i升级版
调焦能力优秀,适用于近距离观察和 远距离探测
耐压深度:4000m
产品介绍
Gemini 720id参数
工作频率
声学角度分辨率 扫描扇区 波束个数
720KHz
《多波束成像声呐仿真及成像分析研究》范文

《多波束成像声呐仿真及成像分析研究》篇一一、引言多波束成像声呐(Multi-beam Imaging Sonar)是一种高分辨率、高精度的水下探测设备,广泛应用于海洋科学研究、水下考古、海洋资源探测以及军事等领域。
其工作原理是通过发射多个声波束,对水下目标进行扫描,并根据接收的回波信息重构目标的图像。
近年来,随着计算机技术和信号处理技术的不断发展,多波束成像声呐在成像性能和抗干扰能力方面取得了显著的进步。
本文将对多波束成像声呐的仿真及其成像分析进行研究。
二、多波束成像声呐的仿真1. 仿真模型建立多波束成像声呐的仿真模型主要包括声呐系统模型、目标模型和环境模型。
声呐系统模型包括发射器、接收器和信号处理模块等;目标模型用于模拟水下目标的形状、大小和材质等特征;环境模型则用于模拟水体的声速、温度、盐度等参数以及水下的地形地貌等。
在仿真过程中,首先需要根据实际需求和条件,设定仿真参数,如声呐的工作频率、波束数、扫描速度等。
然后,通过建立仿真模型,模拟声波的发射、传播和接收过程。
2. 仿真结果分析仿真结果主要包括声波的传播图像和回波信号的时序图。
通过对这些图像和时序图的分析,可以了解声波在水下的传播特性,如声速分布、衰减等。
同时,还可以分析回波信号的强度、频率等特征,为后续的成像处理提供依据。
三、多波束成像分析1. 成像原理多波束成像声呐的成像原理是通过多个声波束对水下目标进行扫描,根据接收到的回波信息重构目标的图像。
在成像过程中,需要考虑到声波的传播特性、目标特性以及环境因素等多种因素。
2. 成像性能评价多波束成像声呐的成像性能主要受到分辨率、信噪比和动态范围等指标的影响。
分辨率越高,能够分辨出目标越细微的特征;信噪比越高,图像的清晰度越高;动态范围则决定了图像的亮度和对比度。
通过对这些指标的分析,可以评价多波束成像声呐的成像性能。
3. 成像结果分析通过对多波束成像声呐的实际应用进行实验研究,可以获得水下目标的图像。
声呐图像的三维重建技术研究

声呐图像的三维重建技术研究声呐技术是一种无创性、安全可靠的医疗检测手段,能够在人体内部获得高分辨率的图像信息,发挥了在医学、生物医学等领域的重要作用。
然而,传统的声呐图像是二维的,只有一个截面信息,难以准确还原三维模型信息。
因此,声呐图像的三维重建技术研究也成为了目前医疗影像领域的研究热点之一。
一、三维重建技术的应用声呐图像三维重建技术在医疗诊断、治疗方案制定、手术规划等方面都有着广泛的应用。
例如,对于心脏病的诊断,三维重建技术可以通过重建立体实体模型,通过旋转、放大等操作判读心脏病发生部位、大小、形态特征等重要信息,对病情进行全面评估。
在骨科手术规划中,医生可以通过重建患者受伤部位的三维模型,对手术范围、操作角度等进行合理规划,术前精确确定手术的困难程度、手术时间和术后的修复进程。
二、三维重建技术的发展历程早在20世纪90年代,人们开始尝试使用三维重建技术研究声呐图像的三维结构。
最初的方法是通过单张不同角度的二维图像叠加,最终形成三维模型。
但是由于这种方法耗时长且图像信息不准确,限制了进一步的应用。
随着数字成像技术的发展,更高精度、更高效率的三维重建技术应运而生。
目前主要的三维重建技术包括基于成像图像的方法和基于声信号的方法。
三、基于成像图像的三维重建技术基于成像图像的三维重建技术是通过对多个二维图像进行合成,构建成三维模型。
这种技术需要获取多张图像,而且需要确保拍摄角度不同,增加图像间的差异性。
这种方法可以通过多个诊断仪器进行图像采集,例如核磁共振、CT、X光等仪器。
通过对这些成像技术得到的图像进行重建,可以得到具有高精度的三维模型。
四、基于声信号的三维重建技术基于声信号的重建技术是通过对声信号的处理和分析,重建出三维模型。
这种技术需要先将声信号转换成二维图像,然后再基于多个二维图像构建成三维模型。
这种方法可以通过超声波成像仪器进行采集,该仪器可以捕获到三维声波反射信息。
通过对反射信息进行处理和分析,可以形成高精度的声呐图像三维重建模型。
基于三维成像声纳技术的水下结构探测新方法
t r a d i i t o n a l on s a r s y s t e m a n d u n d e r w a t e r v i s u a l i z a t i o n t o o l s e x i s t ome s d e f e c t s w h e n t h e y a r e u s e d a l o n e .3 1 a r e e - d i me n s i o n a l r e a l —
戴 林军’ ,郝 晓伟 ’ ,吴 静’ ,张振 辉
杭州 3 1 0 0 1 2 ; ( 1 .浙 江省水利 科技推 广 与发 展 中心 ,浙 江
2 .浙 江钱 江科技 发展 有 限公 司,浙江
摘
杭州 3 1 0 0 1 2 )
要 :水利工程水下结构安全隐患的探测至关重要 ,而传统声纳 系统 和水 下可视化工具在单 独使用时均
p e r f o r ma nc e .E a c ht e c no h l o g yi n d e xo ft h e e q u i p me n t s h o w e dt h a t i t c o u l dme e t he t d e ma n df o r d e t ct e i n gt he u n d e wa r t e r s t n l c t u r e s
多波束和三维声呐技术在码头工程中的应用实例
多波束和三维声呐技术在码头工程中的应用实例随着现代码头工程的发展,多波束和三维声呐技术在码头建设和维护中的应用变得越来越广泛。
这些先进技术为码头工程提供了更高效、更精准的测量和监测手段,从而确保了码头设施的安全运营和有效管理。
本文将通过实际案例,介绍多波束和三维声呐技术在码头工程中的应用,分析其优势和价值。
一、多波束和三维声呐技术简介多波束和三维声呐技术是一种利用声波来进行水下测量和成像的先进技术,通过发送多个声波束并接收回波来获取水下目标的位置、形状和深度等信息。
这些技术可以实现对水下地形的高精度测量,对水下障碍物和管线进行快速定位和识别,为港口建设和运营提供了重要的技术支持。
1. 码头建设前期测量在码头建设前期,需要对水域进行精密测量,确定河床地形、水深、泥沙分布等信息,为码头布局和港池清淤提供依据。
传统的测量方法需要大量人力和物力投入,测量精度较低。
而多波束和三维声呐技术可以通过船载设备,实现对大范围水域的高精度测量,同时获取水下地形的三维图像,为码头建设的规划和设计提供了可靠数据支持。
2. 港口维护和清淤作业港口的深水航道和港池需要定期清淤和维护,以确保船舶的安全通行和码头设施的正常运营。
而传统的清淤作业需要大量的测量和勘察工作,耗时耗力。
采用多波束和三维声呐技术可以实时监测水深和泥沙积聚情况,为清淤作业提供精准的导航和作业指引,提高清淤的效率和质量。
3. 水下障碍物和管线检测在港口水域中存在大量的水下障碍物和管线,这些障碍物可能对船舶和港口设施造成潜在的威胁。
通过多波束和三维声呐技术,可以对水下障碍物和管线进行快速定位和识别,为船舶的航行安全和港口设施的保护提供重要的信息支持。
4. 码头设施监测和维护港口的各项设施如码头、桥梁、护岸等也需要定期进行检测和维护,以确保其安全可靠。
利用多波束和三维声呐技术,可以实现对水下设施的监测和评估,及时发现潜在的安全隐患和病害,为设施的维护和修复提供科学依据。
一种声纳图像的三维重建方法

一种声纳图像的三维重建方法李雪峰;姜静【摘要】声纳是重要水下探测与感知设备, 但普通的二维声纳图像包含信息较少, 不利于直观的理解.本文基于声纳图像的映射原理、利用多视角的几何映射关系建立一种特征点的三维重建方法.对声纳的映射与逆映射原理进行描述与分析, 建立一种对高度特征分段分层搜索的重建方法, 实现旋转、平移参数已知情况下的重建;对参数未知的情况, 利用粒子群优化算法和少量特征点获得参数的估计, 在此基础上实现更多特征点的重建;最后增加传感器对旋转平移参数带有误差的估计, 实现重建精度大幅度地提升.该方法对特征点的数量以及重建环境的变化不敏感, 是一种适应性好、鲁棒性较强的方法.%Sonar is an important equipment for submarine detection and perception, but usual two-dimensional sonar images contain fewinformation and can not be comprehended intuitively. Depending on mapping theory of sonar image and using sonar multiple viewgeometry a three-dimensional reconstruction method for feature points is proposed in this paper.The theories of sonar mapping and their inverse mapping are described for building a threedimensional reconstruction method searching height feature in different segmental arc of every layer, which could realize reconstruction under the condition that rotation and translation parameters are known. Corresponding to situations that those parameters are not known, particle swarm optimization algorithm is used to estimate parameters via using fewfeature points. Then more feature points are reconstructed subsequently by estimated parameters. At the end of this paper, the precision is improved drastically by appendingrotation and translation parameters which are estimated by sensors with some errors. This described method is not easy to be obstructed by the number of feature points or reconstruction of scene, and hasgood adaptation as well as robustness.【期刊名称】《沈阳理工大学学报》【年(卷),期】2018(037)005【总页数】8页(P38-45)【关键词】三维重建;声纳图像;粒子群优化【作者】李雪峰;姜静【作者单位】沈阳理工大学自动化与电气工程学院,沈阳 110159;中国科学院沈阳自动化研究所机器人学国家重点实验室,沈阳 110016;沈阳理工大学自动化与电气工程学院,沈阳 110159【正文语种】中文【中图分类】TP751.1随着能源、矿产等资源的日渐紧张,海洋资源的开发和利用越来越受到世界各国的重视,海洋技术与空天技术并列成为21世纪尖端科技竞争的焦点[1-2]。
基于声纳探测技术的水下三维场景实时成像系统

基于声纳探测技术的水下三维场景实时成像系统摘要:针对目前水下三维声纳实时成像系统前端信号通道多、波束形成计算量大的问题,提出一种基于现场可编程门阵列(FPGA)的水下三维场景实时成像系统。
采用FPGA 阵列控制多路信号同步采样,优化波束形成算法对海量数据进行并行处理,同时利用嵌入式处理器PowerPC 控制系统,最终由主控PC 完成三维图像实时显示。
实验结果表明,该系统能够在水下200 m 的范围内实现分辨率为2 cm 的三维成像,三维图像刷新率可达20 帧/秒。
1 概述近年来,随着人们对海洋资源的不断需求与开发,水下探测技术得到了飞速发展。
人们对海洋的主要探测手段是声波,即声纳技术。
因此,利用声纳进行水下探测成为了当今海洋研究的重点课题。
然而,大部分声纳系统都是通过声波来判断有无声纳目标,以及目标的方位和距离。
目前,国内外在海底三维声纳成像技术方面已经取得了一定的成果[1]。
例如:美国RESoN 公司开发的新一代数字声纳SeaBat8125,欧洲共同体和挪威共同开发的Echoscope系列三维声纳,美国的海洋工业公司开发的双频识别声纳以及美国的Farsounder 公司开发的三维前视声纳[2-3]。
我国三维成像声纳也得到一定的发展,中科院声学所、715 所和哈尔滨工程大学等单位等都研制了三维声纳成像系统的试验样机并发表了相关论文[4]。
但这些声纳成像技术大多基于二维映射三维图像,或者小范围的慢速三维成像,成像效果不佳,实时性太差[5]。
本文提出基于三维声纳探测技术的水下三维场景实时成像系统,设计并实现4848 路信号的同步采样,128128 个空间波束形成的大规模数据处理和实时水下三维场景成像。
2 系统总体设计2.1 系统技术特点目前,实时高分辨率的三维声纳系统面临2 个问题[6]:(1)大量前端信号通道的硬件成本昂贵;(2)进行波束形成算法所需的乘累加计算量大。
首先,该系统采用了优化后的模拟退火算法[7],对二维平面上的每一个换能器分配权重系数,在最大旁瓣可以接受的条件下,部分换能器的权重系数可以分配为0,即达到对换能器稀疏化,减小系统运算量的效果[8]。
三维成像声呐在水下沉船扫测中的应用
三维成像声呐在水下沉船扫测中的应用摘要:本文介绍了三维成像声呐的系统组成和工作原理,并将其应用于水下沉船扫测中。
实际应用结果表明,三维点云数据能够很好的获取水下沉船的沉坐状态,精细的展示沉船的各个细节,数据完整、准确,具有其独特的优越性。
关键词:三维成像声呐;水下沉船;点云数据1 引言船舶失事沉没后,从事打捞工作的技术人员需要掌握沉船的沉坐状态信息,以便采用相应的方法进行打捞工作。
传统的二维成像声呐和多波束系统在直观性和精细度方面不能满足船体沉坐状态探测的要求,而三维成像声呐系统能够获取目标更精细的三维点云数据,从而可以提供沉船更多细节状态的描述。
本文阐述了三维成像声呐系统的基本组成和原理,并结合工程应用实例,从数据采集、点云数据去噪、配准和拼接建模等数据处理过程进行了分析。
2 三维成像声呐基本原理三维成像声呐BlueView 5000可生成水下地形、结构和目标的高分辨率图像。
声呐采用紧凑型低重量设计,便于在三脚架或ROV上进行安装,只需触动按钮,三维扫描声呐就会生成水下景象的三维点云。
扫描声呐头和集成的云台可以生成扇区扫描和球面扫描数据。
可以在低照度或者零可见度的水下环境下,获得陆地三维激光扫描一样的图像。
2.1系统组成三维成像声呐系统(BV5000)包括硬件和软件两部分。
其中硬件部分主要包括声呐、云台、甲板单元及数据传输电缆等;软件部分包括Proscan、BlueViewer和第三方软件Cyclone及若干驱动程序。
声呐和云台通过专用线缆连接到接线盒,接线盒又通过以太网电缆和USB传输线与计算机连接,实现计算机与声呐和云台之间的通信,系统示意图见图1。
声呐发射并接收声呐信号,云台控制声呐的旋转和俯仰角度,Proscan是实时控制软件,可控制云台转动及声呐的相关参数,BlueViewer软件可进行点云数据査看和基本量测,第三方软件Cyclone可进行点云数据编辑处理。
2.2 工作原理三维成像声呐系统(BV5000)进行水下扫测的基本原理为声学测距。
基于声呐技术的水下探测与成像方法
基于声呐技术的水下探测与成像方法随着科技的不断发展,人们对于水下探测与成像技术的要求越来越高。
而声呐技术在这些领域中起到了至关重要的作用。
本文旨在介绍基于声呐技术的水下探测与成像方法,探讨其优缺点以及未来发展方向。
一、声呐技术的基本原理声呐技术是利用声波在水中传播的特性,探测水下物体并获取相关信息的技术。
其基本原理是利用声波在水中传播时与物体间的反射、透射、折射等现象,从而实现水下物体探测和成像。
声呐技术包括传统的单波束声呐和现代的多波束声呐,两者在应用场合和性能方面存在一定的差异。
二、基于声呐技术的水下探测方法1. 侧扫声呐侧扫声呐是一种广泛应用于水下测量的声学探测系统,它可以产生水下立体图像,对于水下环境的探测和成像非常有用。
侧扫声呐安装在船只上,通过发射声波,记录可达区域的反射信号,并根据反射信号重建水下物体的三维模型。
2. 雷达声呐雷达声呐是一种高频声波探测系统,主要用于水下目标的探测和识别。
雷达声呐工作时,通过向水下发射一定频率和强度的声波,并通过接受反射回来的信号来获取水下目标的位置、形状和特征等信息。
3. 声纳测深声纳测深是以声波反射原理为基础的一种水下测量技术,主要用于水深的测量和海底地形的探测。
通过测量声波从水面到海底并反射回来所花费的时间,并根据声波传播速度计算出水深,从而实现对水深的准确掌握。
三、基于声呐技术的水下成像方法1. 声频成像声频成像是一种利用声波反射成像的技术,主要用于海底沉积物、水下生态环境等方面的观测和研究。
声频成像器通过发射高频声波,记录回波信号,并利用这些信号生成高分辨率的声学图像,从而显示出水下物体的形状和结构。
2. 态勘探测态勘探测是一种利用声波散射成像的技术,主要用于水下建筑物、沉船、神秘物体等方面的探测和研究。
态勘探测器通过发射短脉冲声波,利用目标对声波散射的特性,实现对目标的探测和成像。
四、声呐技术的优缺点及未来发展方向1. 优点声呐技术具有探测距离远、精度高、响应速度快、成本低等优点,能够较好地满足水下探测与成像领域的需要。
多波束和三维声呐技术在码头工程中的应用实例
多波束和三维声呐技术在码头工程中的应用实例【摘要】码头工程在现代社会中扮演着举足轻重的角色,而多波束和三维声呐技术的引入为码头工程提供了全新的解决方案。
本文着重介绍了多波束和三维声呐技术在码头港池勘测、船舶进出港监测、堆场管理、装卸作业和安全监测等方面的应用实例。
通过这些具体案例,我们可以看到这些先进技术在提高工作效率、保障安全、精确监测等方面的重要作用。
在本文强调了多波束和三维声呐技术在码头工程中的潜力和未来发展前景,指出其有望为码头工程带来更高效、更安全、更精准的解决方案。
可以预见,随着技术的不断进步和应用的不断扩展,多波束和三维声呐技术将在码头工程领域发挥越来越重要的作用。
【关键词】码头工程、多波束技术、三维声呐技术、码头港池勘测、船舶监测、堆场管理、装卸作业、安全监测、高效、安全、精准、发展前景1. 引言1.1 码头工程的重要性码头工程是现代港口建设和管理中至关重要的一部分。
作为港口的重要组成部分,码头承担着货物装卸、货物仓储、船舶停靠等功能,直接影响着整个港口的运营效率和安全性。
码头工程的重要性主要体现在以下几个方面:码头是货物流通的重要枢纽。
大量的货物需要通过码头进行装卸和运输,而高效的码头工程则可以提高货物的周转速度,降低运输成本,促进经济发展。
码头是船舶的重要停靠地点。
船舶停靠在码头进行装卸货物,需要具备良好的泊位、船舶进出口等设施,以确保船舶的安全停靠和货物的安全装卸。
码头还承担着海关监管和安全管理的职责。
通过码头工程的规划和建设,可以提高海关监管的效率,保障进出口货物的安全和质量。
码头工程在现代港口建设和管理中发挥着至关重要的作用,对促进经济发展、提高物流效率和保障安全生产具有重要意义。
对于码头工程的建设和管理需要引入先进的技术和手段,以提高工作效率和安全性。
1.2 多波束和三维声呐技术的介绍多波束和三维声呐技术是一种先进的水下测量技术,被广泛应用于海洋工程和港口建设领域。
多波束声呐是一种能够同时发射多个声波束进行测量的技术,通过接收多个回波数据进行三维图像重建,实现对水下目标的高精度测量和成像。
三维成像声纳论文
三维成像声纳姓名:徐静班级:1013105专业:光电子技术与科学院校:长春理工大学光电信息学院目录摘要第一章声呐1.1 声呐的概述1.2 三维成像技术1.3 三维成像声呐的发展现状第二章三维成像声呐的工作原理第三章三维成像声呐的应用第四章三维成像声纳的选择第五章结论和展望摘要声纳的发展背景:海洋蕴藏着丰富的矿产和能源,同时又具有重要的军事地位,海洋开发日益受到人们的重视。
首先,全球能源日益紧张,所以开发新的能源和空间十分必要,海洋是个巨大的能源宝库,具有很大的开发潜力。
其次,我国海岸线绵长,海域辽阔,了解海域特点、海底地形地貌状况对维护国家安全很有必要。
从上面可以看到成像声纳有着十分广泛的用途,不仅关系到军事方面,而且还关系到国民经济生活发展的很多方面,所以研究和发展成像声纳十分必要和迫切。
三维成像声纳所使用的可视化技术,将大量枯燥的数据以生动的立体图形图像的方式表现出来,使人们能够对声纳数据进行更直观的解释和分析,提高水下探测的工作效率。
借助成熟的三维显示技术,三维图形可被缩放、移动和转动、测距,以便工作人员可以从各种视角更好地进行观察和理解,提供准确、科学的依据。
1.1声呐的概述声呐是英文缩写“SONAR”的音译,其中文全称为:声音导航与测距,Sound Navigation And Ranging”是一种利用声波在水下的传播特性,通过电声转换和信息处理,完成水下探测和通讯任务的电子设备。
它有主动式和被动式两种类型,属于声学定位的范畴。
声呐是利用水中声波对水下目标进行探测、定位和通信的电子设备,是水声学中应用最广泛、最重要的一种装置。
声呐是各国海军进行水下监视使用的主要技术,用于对水下目标进行探测、分类、定位和跟踪;进行水下通信和导航,保障舰艇、反潜飞机和反潜直升机的战术机动和水中武器的使用。
此外,声呐技术还广泛用于鱼雷制导、水雷引信,以及鱼群探测、海洋石油勘探、船舶导航、水下作业、水文测量和海底地质地貌的勘测等。
陆地声纳的三维显示技术研究

工 业 技 术
陆地 声 纳 的 三维 显 示技 术 研 究
王 双 燕 ( 中国矿业 大学 ( 北 京) 北京 1 0 0 0 0 0)
摘
要: 本论文主要根据 陆地 声呐的三维显示的意 义, 现代三 维显 示技 术的显示现状 , 分析可实施 的方法, 实现较好 的直观 的显示的结构
( 3 ) 三维显示可以将分 散二维图象 , 综 三 维 显 示 的原 理 。
员必须 在 大 脑 中 进 行 图形 分 析 、 整合 , 才 能 分 量 的 状 态 , 从 而 更 加 方 便 的 分 析 地 下地 3 研究 内容 构 成 完 整 的 数 据 图像 , 三分 量 显 示 技 术 可 质 形 态 , 而 且 可 以 从 三 维 的 角 度去 分 析 和 以将数据完 整的显示成一幅 图片 , 从 而 直 判 断 地 质体 的 空 间形 态 。 观的显示出数据信 息。 陆地 声纳 三分 量是 指垂直 地 面的垂 直分 2 H T M L 5 和 We b G L 用于三维 显示的原 理 量, 平行地 面又 与炮检 线平行 的水平 分量 , 及
Th r ee —d i men s i O n aI di s p l ay t e c h n ol o g y r e s e a r c h o f l a n d S On ar
三维声呐成像系统在防波堤水下安装块石中的运用
收稿日期: 2018 ̄05 ̄09 作者简介: 胡金龙 (1991— ) ꎬ 男ꎬ 助理工程师ꎬ 从事水下地形勘测技术工作ꎮ
������214������
水运工程
2019 年
图 1 主防波堤断面布置 (单位: m)
Lee 防波堤为抛石堤ꎬ 从现有海岸向外侧延伸至 Q28 码头ꎬ 并与 Q28 码头衍接ꎬ 总长度约 1 480 mꎬ 水深范围为 0 ~ 17 mꎻ 堤身基础采用局部换填和碎 石桩处理两种形式ꎮ 护面石为 1 ~ 3 t 和 3 ~ 6 t 两种 规格ꎬ 护面块体为 7 m3 和 16������ 7 m3 两种规格的立 方体结构ꎮ
Keywords 3D sonar imaging system breakwater underwater installation of concrete cube
目前ꎬ 水工建筑物或水下结构物的探测及安装 的主要手段有水下目视检测、 水下照相录像、 潜水 辅助安装等方法 1 ̄2 ꎬ 在防波堤水下块石安装中最主 要的方法 仍 是 潜 水 员 辅 助 履 带 吊 或 挖 掘 机 进 行 作 业ꎮ 该方法虽然操作简单、 应用面广ꎬ 但是在水体 浑浊、 波浪大等不利条件影响下ꎬ 安装效率往往难 以满足工程进度需要ꎬ 且潜水作业存在一定的安全 风险ꎮ 水下三维声呐成像技术是通过发射和接收声 波进行测距定位的成像技术ꎮ 此项技术在水下细部 结构探测中已经得到良好的应用证明ꎬ 能够实时、
摘要: 防波堤工程水下块石安装的效率及安全是工程中至关重要的部分ꎬ 而传统的安装方法和检测手段存在严重不足ꎮ
三维实时声呐成像系统有效克服了传统方法的弊端ꎬ 具有实时、 高效、 清晰、 保证人员安全的优势ꎮ 并且能够在水下能见
度极低、 海况条件差等复杂条件下正常工作ꎮ 以以色列阿什杜德港防波堤工程为例ꎬ 总结利用水下三维声呐成像系统安装
三维成像声纳在水下工程中的应用研究

三维成像声纳在水下工程中的应用研究所谓的三维成像声纳技术,就是利用声纳设备发射声波,这些声波触及到目标物以后会反射回来,系统可以根据回波对目标物进行定位和成像,这种方式与常规的旁扫有所不同,它能够直接获取水下结构的三维图像,不仅及时,而且准确,将这种技术应用于水下工程中,可以顺利完成水下探测工作。
文章简述了三维成像声纳系统的构成及功能,并分析了其在水下工程中的具体应用。
标签:三维成像声纳;水下工程;应用前言影响海洋工程质量安全的因素有很多,一般将这些因素分为两种,一种是水上结构部分,使用一些常规技术即可排除水上部分的安全隐患,包括触摸、观察、NDT检测等,另一种是水下结构部分,受到环境的限制,使用常规技术无法排除水下部分的安全隐患,这部分隐患不仅难发现、难处理,而且随着日积月累,微小缺陷可能会逐步扩大,最终导致极大的破坏,三维成像声纳技术就能够有效解决这一问题,高效检测海洋工程水下复杂结构部分的安全隐患,保证海洋工程水下施工的安全、稳定运行。
1 三维成像声纳系统概述1.1 系统的构成与具体功能三维成像声纳系统由三部分构成,其一是声纳头,其二是电脑终端,其三是电源和设备安装支架,其中声纳头有两个阵,一个是声纳阵,声波信号沿着锥形方向发射出去,另一个是接收阵,该阵由若干个水听器传感器组成,接收返回来的声波,最终目标物的三维图像会在电脑终端显示出来,测距的范围一般在1米至150米,图像更新的速度可以达到每秒20次。
声纳头的布局有两种形式,一种是靠岸加固,另一种是随船移动,具体布局形式根据周围环境以及检测对象的特征确定。
而在一般的海洋工程中,经常使用的是二维声纳Seaking DFS,声纳头的布局有所不同,一般都是固定安装在ROV(水下机器人)上,通过对水下机器人的操控实现对声纳头位置的控制,随着海洋工程的进一步发展,人们对声呐技术提出更高要求,将三维声纳应用于海洋工程中,通过声波信号的发射与收集,形成具有较高分辨率的图像,不仅能做到实时成像,图像还可以被缩放、旋转和移动,为水下施工过程提供准确、完整的信息[1]。
三维声呐工作报告
三维声呐工作报告摘要本报告介绍了三维声呐的工作原理、应用领域、技术优势以及发展趋势。
三维声呐作为一种重要的水声探测技术,已经在海洋勘探、海底测绘、水下目标识别等领域得到广泛应用。
随着技术的不断进步和应用需求的不断扩大,三维声呐在水声探测领域的应用前景非常广阔。
本报告旨在通过详细介绍三维声呐的工作原理和应用情况,为相关领域的研究人员和技术从业者提供参考。
关键词:三维声呐;水声探测;海洋勘探;海底测绘;水下目标识别一、引言三维声呐是一种利用声波对水下目标进行探测和成像的技术设备。
相对于传统的二维声呐,三维声呐能够在水下实现更加精确的定位和成像,具有更高的分辨率和更广的探测范围。
三维声呐在海洋勘探、海底测绘、水下目标识别等领域具有重要的应用价值,受到了广泛关注。
二、工作原理1. 声波传播原理三维声呐利用声波在水下的传播特性来实现对水下目标的探测和成像。
声波在水下的传播速度受到水域温度、盐度、压力等因素的影响,因此在实际应用中需要进行相关的修正和校正。
2. 接收和处理技术三维声呐通过接收水下目标反射回来的声波信号,并通过信号处理技术进行分析、滤波、增强等操作,从而实现对水下目标的成像和识别。
接收和处理技术是三维声呐的核心技术之一,直接关系到声呐系统的成像效果和探测性能。
三、应用领域1. 海洋勘探三维声呐在海洋勘探中起着至关重要的作用,可以对海底地貌、地质构造、海底生物等进行全方位、高分辨率的探测和成像,为海洋勘探工作提供了重要的技术支持。
2. 海底测绘三维声呐可以实现对海底地形的三维成像,具有较高的空间分辨率和成像精度,可以为海底管道敷设、海底工程施工等提供具体的地形数据,为相关海底工程的规划和实施提供重要的参考依据。
3. 水下目标识别三维声呐可以对水下目标进行精确的识别和定位,包括潜艇、水下无人航行器、水下管线等,具有重要的军事和民用应用价值。
四、技术优势1. 高分辨率三维声呐具有较高的空间分辨率和成像精度,可以对水下目标进行精准的成像和识别。
海洋测绘技术手段在水下隐蔽工程结构检测中的应用——以水下三维全景声呐为例
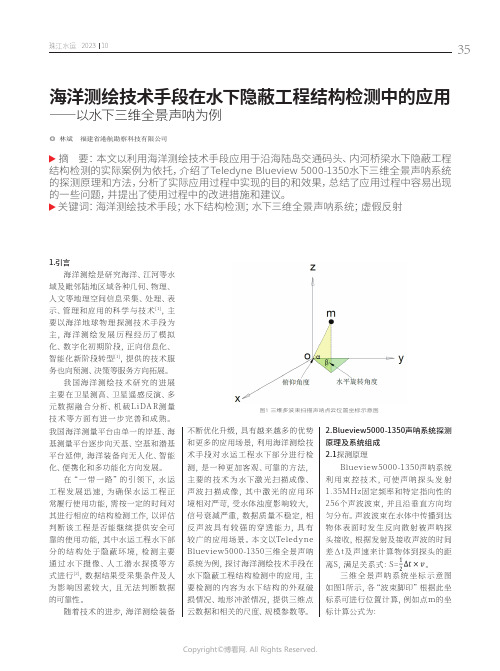
海洋测绘技术手段在水下隐蔽工程结构检测中的应用——以水下三维全景声呐为例◎ 林斌 福建省港航勘察科技有限公司摘 要:本文以利用海洋测绘技术手段应用于沿海陆岛交通码头、内河桥梁水下隐蔽工程结构检测的实际案例为依托,介绍了Teledyne Blueview 5000-1350水下三维全景声呐系统的探测原理和方法,分析了实际应用过程中实现的目的和效果,总结了应用过程中容易出现的一些问题,并提出了使用过程中的改进措施和建议。
关键词:海洋测绘技术手段;水下结构检测;水下三维全景声呐系统;虚假反射1.引言海洋测绘是研究海洋、江河等水域及毗邻陆地区域各种几何、物理、人文等地理空间信息采集、处理、表示、管理和应用的科学与技术[1],主要以海洋地球物理探测技术手段为主,海洋测绘发展历程经历了模拟化、数字化初期阶段,正向信息化、智能化新阶段转型[1],提供的技术服务也向预测、决策等服务方向拓展。
我国海洋测绘技术研究的进展主要在卫星测高、卫星遥感反演、多元数据融合分析、机载L iDA R测量技术等方面有进一步完善和成熟。
我国海洋测量平台由单一的岸基、海基测量平台逐步向天基、空基和潜基平台延伸,海洋装备向无人化、智能化、便携化和多功能化方向发展。
在“一带一路”的引领下,水运工程发展迅速,为确保水运工程正常履行使用功能,需按一定的时间对其进行相应的结构检测工作,以评估判断该工程是否能继续提供安全可靠的使用功能,其中水运工程水下部分的结构处于隐蔽环境,检测主要通过水下摄像、人工潜水探摸等方式进行[2],数据结果受采集条件及人为影响因素较大,且无法判断数据的可靠性。
随着技术的进步,海洋测绘装备不断优化升级,具有越来越多的优势和更多的应用场景,利用海洋测绘技术手段对水运工程水下部分进行检测,是一种更加客观、可靠的方法,主要的技术为水下激光扫描成像、声波扫描成像,其中激光的应用环境相对严苛,受水体浊度影响较大,信号衰减严重,数据质量不稳定,相反声波具有较强的穿透能力,具有较广的应用场景。
基于声纳检测的排水管道三维成像方法研究
基于声纳检测的排水管道三维成像方法研究摘要:传统的二维声纳图像很难直观地呈现管道缺陷的分布情况,而三维成像方法可弥补二维图像不足,提高缺陷检测效果。
本文提出一种实用管道三维成像方法,详细阐述了图像预处理、边缘检测、圆心检测以及三维可视化原理,并对工程现场排水管道进行实验。
实验表明,该方法可以清晰地显示管道及其内部状况,为市政排水管网的维护提供了高效检测手段。
关键词:声纳检测、边缘检测、VTK1.引言城市排水管网是城市最重要基础设施之一,承担着城市污水、雨水排放的重要功能。
如长期不加以检测和维护,会产生堵塞、变形、渗漏以及腐蚀等问题,影响排水功能,甚至会造成路面积水及坍塌,对城市交通及其他管道的使用造成极大的影响。
因此,排水管网的定期检测与维护可以延长管道寿命,保障排水管网正常运行。
目前,常用的排水管网检测方法主要有管道闭路电视内窥检测、声纳检测以及潜望镜等检测手段【1】。
在众多检测手段中,声纳检测可实现不断流检测,因此在管道检测中使用广泛【2】。
但声纳图像三维成像技术可直观发现察管道中缺陷分布情况,提高检测效率。
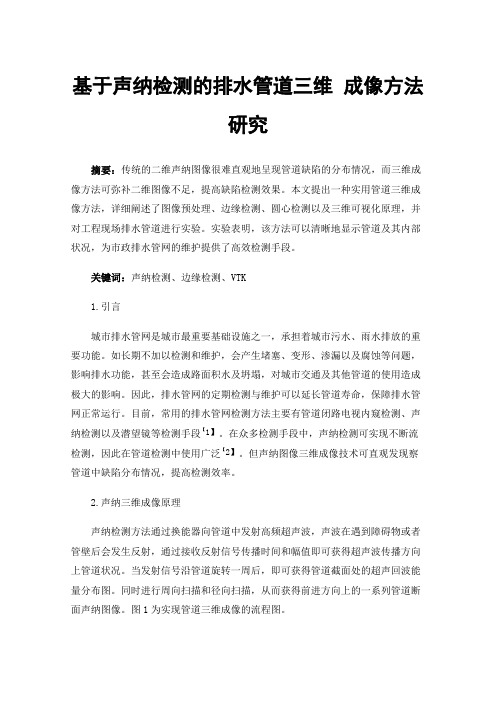
2.声纳三维成像原理声纳检测方法通过换能器向管道中发射高频超声波,声波在遇到障碍物或者管壁后会发生反射,通过接收反射信号传播时间和幅值即可获得超声波传播方向上管道状况。
当发射信号沿管道旋转一周后,即可获得管道截面处的超声回波能量分布图。
同时进行周向扫描和径向扫描,从而获得前进方向上的一系列管道断面声纳图像。
图1为实现管道三维成像的流程图。
图1 三维成像流程图2.1图像预处理声纳图像是声纳回波信号的幅值图像,由于声纳在传播过程中衰减,声纳图像易受噪声干扰,且对比度不高。
因此,图像需进行预处理,减小噪声,增强对比度是提高三维成像质量的重要保障。
首先对声纳图像进行去噪,为防止去除噪声时削弱图像边缘,采用双边滤波既可保持边界清晰又可去除噪声【3】。
双边滤波数学表达如式(1)所示(1)其中,为滤波后的图像,为原始图像,x为当前滤波像素点索引,是以x为中心的窗,fr 为灰度值相似性核函数,gs为空间核函数,通常选高斯函数作为核函数。
C3d侧扫声纳综述
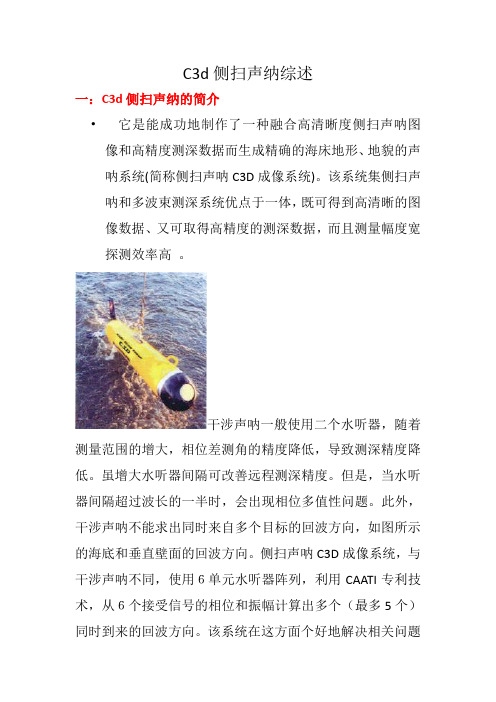
C3d侧扫声纳综述一:C3d侧扫声纳的简介•它是能成功地制作了一种融合高清晰度侧扫声呐图像和高精度测深数据而生成精确的海床地形、地貌的声呐系统(简称侧扫声呐C3D成像系统)。
该系统集侧扫声呐和多波束测深系统优点于一体,既可得到高清晰的图像数据、又可取得高精度的测深数据,而且测量幅度宽探测效率高。
干涉声呐一般使用二个水听器,随着测量范围的增大,相位差测角的精度降低,导致测深精度降低。
虽增大水听器间隔可改善远程测深精度。
但是,当水听器间隔超过波长的一半时,会出现相位多值性问题。
此外,干涉声呐不能求出同时来自多个目标的回波方向,如图所示的海底和垂直壁面的回波方向。
侧扫声呐C3D成像系统,与干涉声呐不同,使用6单元水听器阵列,利用CAATI专利技术,从6个接受信号的相位和振幅计算出多个(最多5个)同时到来的回波方向。
该系统在这方面个好地解决相关问题二:侧扫声纳工作的原理1、侧扫声纳是水下搜索、水下考察等一项重要的有力的工具,它能不受水体可见度的影响而快速覆盖大面积水域“看”到水下情况。
每边旁扫通过向水底发射声纳,反射后被拖鱼接收形成声纳影象来发现水下物体。
接收到的信号通过拖缆传到甲板上的显示单元。
[2]2、显示单元显示的是高分辨率的海底或湖底或河底或位于底部其他物体的声纳影像。
声纳的声波是通过安装在两边的拖鱼发射并接收的。
换能器的分辨率决定于发射声波的频率。
3、旁扫是以较低的频率来得到较大的扫描范围,但是精度要低。
高频系统可以得到较高的精度,但是扫描范围较小。
双频旁扫同时拥有高频和低频换能器,这样可以得到较大范围同时分辨率较高的图像。
4,侧扫声纳左右各安装一条换能器线阵,首先发射一短促的声脉冲,声波按球面波方式向外传播,碰到海底或水中物体会产生散射,其中的反向散射波(也叫回波)会按原传播路线返回换能器被换能器接收,经换能器转换成一系列电脉冲.三:C3D侧扫声纳的应用1:海洋测绘中C3D侧扫声纳可以显示微地貌形态和分布,可以得到连续的有一定宽度的二维海底声图,而且还可能做到全覆盖不漏测,这是测深仪和条带测深仪所不能替代的,所以港口、重要航道、重要海区,都要经过侧扫声纳测量情况. 这是其他探测设备不可替代的2:海洋地质调查C3D侧扫声纳的海底声图可以显示出地质形态构造和底质的大概分类,可以显示出洋脊和海底火山,是研究地球大地构造和板块运动的有力手段3:海洋工程勘探利用C3D侧扫声纳可以分析地貌、海底构造,底质,可以分析海床迁移和稳定性. 所以也广泛应用于海洋工程勘探,如海底电缆、海底输油管线的路由器调查等4:寻找水下沉船沉物和探测水雷C3D侧扫声纳分辨力高,可以发现水雷等小目标,可以发现沉船,并能显示沉船的坐卧海底姿态和破损5:C3D用途大概可总结:•C3D侧扫声纳还广泛应用于其他方面,如渔业研究、水下考古等水道通航研究•水道测量与海底地貌制图•工程与科学研究•水下目标物探测•电缆、光缆及海底管线探查•过江及跨海大桥水下建筑物安全探测•海底矿产分布状况探测•渔群生物量估计四:声图成像特征声图依据扫描线像素的灰度变化显示目标轮廓和结构以及地貌起伏形态. 目标成像灰度有两种基本变化特征:(1)隆起形态的灰度特征. 海底隆起形态在扫描线上的灰度特征是前黑后白,亦即黑色反映目标实体形态,白色为阴影.(2)凹陷形态的灰度特征. 海底凹洼形态在扫描线上的灰度特征是前白后黑,亦即白色是凹洼前壁无反射回声波信号,黑色是凹洼后壁迎声波面反射回波声信号加强.海底表面起伏形态和目标起伏形态,在声图上反映灰度变化,就是以上两种基本特征的组合排列变化(见图8).五:C3D系统的优势1.用户可根据需要进行选择舷侧固定、拖鱼及AUV等多种安装方式,通过ADSL高速通信连接器和光缆通讯,可对3000―6000m海底地形进行探测。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
***************************有限公司三维成像声纳姓名:***部门:***部门入司时间:20**年*月5日指导师傅:***完成时间20** 年** 月8 日目录第1 章前言1.1 声纳的发展背景海洋蕴藏着丰富的矿产和能源,同时又具有重要的军事地位,海洋开发日益受到人们的重视。
首先,全球能源日益紧张,所以开发新的能源和空间十分必要,海洋是个巨大的能源宝库,具有很大的开发潜力。
其次,我国海岸线绵长,海域辽阔,了解海域特点、海底地形地貌状况对维护国家安全很有必要。
从上面可以看到成像声纳有着十分广泛的用途,不仅关系到军事方面,而且还关系到国民经济生活发展的很多方面,所以研究和发展成像声纳十分必要和迫切。
三维成像声纳所使用的可视化技术,将大量枯燥的数据以生动的立体图形图像的方式表现出来,使人们能够对声纳数据进行更直观的解释和分析,提高水下探测的工作效率。
借助成熟的三维显示技术,三维图形可被缩放、移动和转动、测距,以便工作人员可以从各种视角更好地进行观察和理解,提供准确、科学的依据。
1.2 三位成像声纳的发展现状三维成像声纳与普通的多波数声纳的区别,在于它具有更高的分辨率,从而可以提供水下目标外形轮廓的更多细节描述。
高分辨率成像声纳在对水下目标进行成像时,能够提供非常优秀的图像质量,从而可以对目标进一步地跟踪和识别。
目前最前沿的三维成像声纳是以声透镜技术为基础,它能给客户提供目标的实时动态视频图像,质量小、尺寸小,可以装载到各种AUV、ROV上进行水下作业。
声视觉导航:给出目标物尺寸和方位信息海底地貌检测:提供海底的等高线图和地理参考数据,海图的绘制。
残骸搜索:提供失事船只残骸的详细信息堤坝的检测:提供堤坝的裂缝信息管道检测:对海底油气输送管道进行安全检查桥墩探伤:检测受损桥墩的险情海港检测:给出水下目标的回声及运动轨迹和速度海床检测:矿产资源和能源勘探图1-1 海图图1-2 失事船只残骸第2章声纳工作的基本原理声纳头发射声音波束的频率是特定的,声纳头发射波束,波束经过障碍物反射,声纳头接收声音信号,将其转化为电信号;再通过RS232协议将电信号传输至水下光端机,光端机把电信号转化为光信号,光信号通过光缆传输至水上光端机,水上光端机把光信号转化为电信号,再通过RS232协议传输至声纳控制单元,声纳控制单元利用声纳的操作软件(如Seanet Pro)把声纳头扫描到的信息以图像的形式显示在显示屏上。
在水上,可以通过操作软件或控制单元面板控制声纳。
标准的声纳水下接头的是由Tritech提供的6针的接头,如图2-4所示。
图2-1 声纳发射与接收信号图2-2 声纳控制软件界面图2-3 声纳工作线路图2-4 声纳的六针接头第3章产品介绍及其应用示例3.1 产品介绍3.1.1Gemini 720iGemini 720i是一种紧凑型实时高频sonar,它创设了多波束成像声纳的新标准,优化的信号处理电路设计使Gemini 720i sonar提供清晰的实时图像;一个集成的声速计能进行图像的锐化和精确测距;声纳数据能呈现在Tritech公司的Senet Pro 或Gemini的独立操作软件上。
如图3-1:图3-1 Gemini 720i 系统的主要技术规格:接口规格:机械参数:3.1.2 EclipseEclipse不仅是一个多波束测深系统,还可以安装在ROV上在2500m水深作为前视导航和三维立体化可视模式系统。
它采用延时式波束形成模式和电子式波束控制系统。
它电子扫频可以获得1.5°剖面式波束,声纳头前方120°x45°空间的图像数据可以获得。
并且以10米量程和1°扫频步进速度,Eclipse扫描整个工作空间不需要1秒。
3D模式可以吧测量数据进行数字化处理嵌入到3D图像中,图像包含距离、方位数据、水平和垂直距离,以及感兴趣的两个方位点之间的倾斜角度数据。
它有两种模式:剖面模式(120°x1.5°)或前视模式(120°x45°)。
Eclipse可以通过测距和辅助导航接近目标获得目标更详细的数据资料。
如图3-2:图3-2 eclipse系统的主要技术规格:物理特性甲板控制单元:Eclipse使用具有高性能图像处理功能的专用PC机作为甲板单元。
PC机安装有专用于和Eclipse声纳头通讯的硬件单元和处理软件。
3.1.3 Gemini 720idGemini 720id是继Gemini 720i之后的又一款前视三维实时成像声纳,它的耐压深度是4000m,波束宽度120°。
由于其优秀的调焦能力,它不仅适用于近距离观察ROV自身的推进器而且适用于远距离目标探测。
如图3-3:图3-3 Gemini 720id 系统的主要技术规格:接口参数:机械参数:3.1.4 BLUEVIEW BV5000BLUEVIEW BV5000系列是高分辨率三维实时成像声纳目前该系列只要有两款三维成像声纳:BLUEVIEW BV5000-1350和BLUEVIEW BV5000-2250。
如图3-4:其参数如下表所示:图3-4 BLUEVIEW BV50003.1.5 Seaking DFSQUANTUM13所用ROV是二维声纳Seaking DFS,二维成像声纳有时被称为“声学摄像机”,它能对视野范围内动态和静态的物体扫描,其操作软件能够测出声纳头与障碍物的距离以及目标物的尺寸及相对于声纳方位信息。
操作员可以通过经验判断出声纳视野范围内结构,如海床、海管、导管架等的信息。
在此列出二维声纳Seaking DFS的参数,只为与三维声纳进行对比。
图3-5Seaking DFS声纳头参数如下表所示:QUANTUM13所采用的水上控制单元是SCU(V4)。
SEANET Surface Control Unit(SCU)采用了现代PC技术和复杂的远程通道终端—Remote Access Terminal(RAT)组成。
Seanet SCU(V4)是由Tritech推出的,内有Arcnet AIF卡。
应用USB接口拓展功能使其拥有跟多的接口,并且应用9针COM接口使其用尽可能少的外部接口连接尽可能多的外围设备。
其正面面板如图3-6所示:图3-6 Seanet SCU(V4)声纳的控制单元参数3.2三维成像声纳应用示例图3-7 gemini720i沉船扫描图3-8 BV5000-1350船坞扫描图3-9 BV5000-2250导管架扫描图3-10 二维声呐扫描示例第四章三维成像声纳的选择声纳的选择主要参考声纳的类型、价格以及以下五个参数:深度级别、频率、重量、扫描扇区、通讯接口以及性能。
类型二维避障声纳:这种声纳能够实现避障、搜索目标以及目标确认的功能。
三维成像声纳:这种声纳在目标物与声纳相对静止的条件下扫描到清晰的图像,这种声纳一般运用在码头、船坞、桥墩等的检测中,将这种声纳装在支架上放到河床上或者浅海海床上,在与目标物相对静止的条件下拍摄到扫描范围内的情况。
简单地说,这种声纳在零能见度条件下发挥了相机的作用,但与相机有两点不同:相机拍摄不到障碍物后面的情况,但是三维成像声纳能够现实障碍物后面的情况。
相机拍摄的结果是既定的,即照片中的内容已经定格了,但是三维成像声纳扫描得到得图形能够随意翻转,能够从另外的角度讲目标物显示在终端显示屏上。
三维实时成像声纳:这种声纳能够在目标物与声纳相对运动运动的情况下实时地将声纳扫描得到的数据以图像的形式展现在终端显示器上。
如ROV在检查海管时,ROV可以沿着管线前进,ROV可以扫描到声纳;这种声纳能够扫描到水中游动的鱼。
简单地说,这种声纳在零能见度条件下能够想摄像机一样拍摄到扫描范围内的情况,但与摄像机也有两点不同:摄相机拍摄不到障碍物后面的情况,但是三维成像声纳能现实障碍物后面的情况。
摄相机拍摄的结果是既定的,即照片中的内容已经定格了,但是三维成像声纳扫描得到得图形能够随意翻转,能够从另外的角度讲目标物显示在终端显示屏上。
频率声纳的频率越高、波束越窄成像的清晰度就越高,但是对光纤和光端机的要求也就越高,ROV命令、反馈信号、图像等信号的传输是通过单模光纤传播的,单模光纤相比于多模光纤可支持更长传输距离,在100Mbps的以太网,单模光纤都可支持超过5000m的传输距离,载波频率越大,同一根光纤能够传输的数据量越大,所以三维成像声纳的应用一般不会影响到其它信号的传输。
Quantum13、Quantum14、Quantum18、Quantum19铠甲缆中有六根光纤,Quantum13、Quantum14滑环中光滑环只允许两根光纤,Quantum18、Quantum19滑环中光滑环只允许三根光纤,并且一根是TMS的光缆,所以四套设备用于ROV通讯的光纤各只有两根,其中一根是备用光纤。
声纳图像信息的容量过大,单根光纤无法传输时有两种方法可以解决:如果光端机可以同时对两根光纤编码,可以启用另一根光纤,一根光纤只传输声纳的信号,另一根传输其他信号。
如果光端机在同一时刻只能编码一根光纤上的数据,可以应用光纤收发器对另一根光纤收发信号。
重量下表中提供的重量参数中,Gemini 720i、Gemini 720id、Eclipse、Seaking DFS 都是声纳自身的重量,BV5000系列的两款声纳的重量包括云台的重量。
Quantum13、Quantum14、Quantum18、Quantum19都是功率为150马力的工作级ROV,所以下表中重量等级的几款声纳是可以应用的。
扫描扇区根据ROV工作的需求来选用相应扫描扇区的声纳。
第五章结论和展望目前二维声纳在声纳的应用领域中还占据有很大的比例,但由于三维成像声纳的优秀品质,三维成像声纳将逐渐占领这一领域。
水下环境有广泛的应用领域,舰船导航、海洋勘探、游戏娱乐都离不开声纳。
近年来海洋声学和声纳技术快速发展,全球定位系统和计算机技术飞速发展,以及三维可视化技术日益完善是声纳的发展又奠定了一个有力的基础。
相信在各项相关技术日趋成熟的条件下,声纳技术将迎接另一个里程碑。