六自由度工业机器人运动学和动力学分析答辩PPT
六自由度机器人运动学分析
六自由度机器人运动学分析殷固密,王建生(五邑大学智能制造学部,广东江门529020)0引言随着中国制造2025和工业4.0的提出与发展,机器人在“机器换人”和提高社会生产力中扮演着不可或缺的重要位置。
为了使机器人平稳准确地完成指定任务,机器人的运动学分析是必不可少的。
其中,机器人运动学分析的基础就是D-H 参数建立和正逆运动学求解及验证。
通过基础分析,可以帮我们了解机器人的工作方法,揭示机构的合理运动方案和控制算法。
结合使用仿真软件的计算可视化,可以更直观地体现机器人的设计效果,及时发现缺点和不足并改正。
以库卡机器人KR16-2,一种末端三关节轴线相交于一点的六自由度工业机器人为研究对象,通过Craig 和Spong 两种不同的D-H 法则(全称Denavit-Hartenber)对该机器人机型进行运动学建模,推导出机器人正逆运动学模型,并利用MATLA 及Robotics Toolbox 进行运动学分析仿真验证。
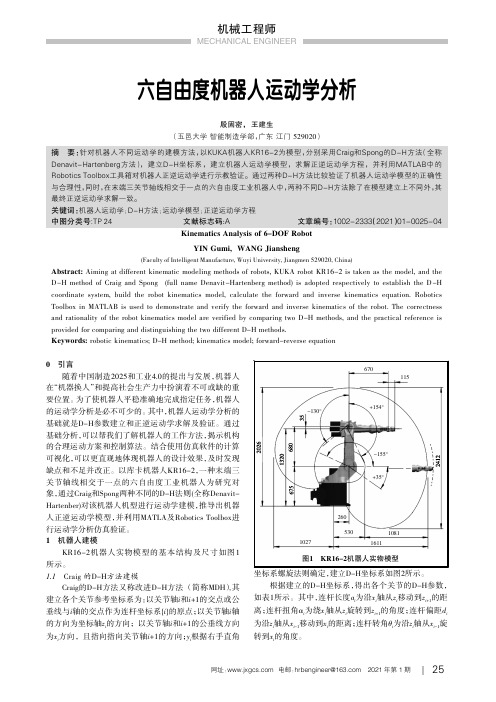
1机器人建模KR16-2机器人实物模型的基本结构及尺寸如图1所示。
1.1Craig 的D-H 方法建模Craig 的D-H 方法又称改进D-H 方法(简称MDH ),其建立各个关节参考坐标系为:以关节轴i 和i+1的交点或公垂线与i 轴的交点作为连杆坐标系{i }的原点;以关节轴i 轴的方向为坐标轴z i 的方向;以关节轴i 和i+1的公垂线方向为x i 方向,且指向指向关节轴i+1的方向;y i 根据右手直角坐标系螺旋法则确定,建立D-H 坐标系如图2所示。
根据建立的D-H 坐标系,得出各个关节的D-H 参数,如表1所示。
其中,连杆长度a i 为沿x i 轴从z i 移动到z i+1的距离;连杆扭角αi 为绕x i 轴从z i 旋转到z i +1的角度;连杆偏距d i 为沿z i 轴从x i -1移动到x i 的距离;连杆转角θi 为沿z i 轴从x i -1旋转到x i 的角度。
摘要:针对机器人不同运动学的建模方法,以KUKA机器人KR16-2为模型,分别采用Craig和Spong的D-H方法(全称Denavit-Hartenberg方法),建立D-H坐标系,建立机器人运动学模型,求解正逆运动学方程,并利用MATLAB中的Robotics Toolbox工具箱对机器人正逆运动学进行示教验证。
机器人技术导论6自由度
机器人技术导论以6自由度工业机器人为例,分析讨论机器人的控制:工业机器人能够提高生产过程的自动化程度和生产设备的适应能力,因而提高产品质量和产品在市场上的竞争能力。
全世界已有约80万台工业机器人正在汽车工业、机电工业和其他工业部门运行,为人类的物质生产建功立业。
其中,以焊接机器人和装配机器人为两个最主要的应用领域。
与工业机器人相比,其他机器人的数量尚十分有限,但其重要性不容忽视,发展前景也十分看好。
市场上供应的工业机器人,关节数多为3~7个。
最典型的工业机器人具有六个关节,存在六个自由度,带有夹手(通常称为手或末端执行装置)。
辛辛那提-米拉克龙T3、尤尼梅逊的PUMA650和斯坦福机械手都是具有六个关节的工业机器人,并分别由液压、气压或电气传动装置驱动。
位置控制:工业机器人位置控制的目的,就是要使机器人各关节实现预先所规划的运动,最终保证工业机器人终端(手爪)沿预定的轨迹运行。
这类运动控制的特点是连续控制工业机器人手爪(或工具)的位姿轨迹。
一般要求速度可控、轨迹光滑且运动平稳。
轨迹控制的技术指标是轨迹精度和平稳性。
工业机器人的控制是个多输入一多输出控制系统。
我们把每个关节作为一个独立的系统。
因而,对于一个具有m个关节的工业机器人来说,我们可以把它分解成m个独立的单输入一单输出控制系统。
这种独立关节控制方法是近似的,因为它忽略了工业机器人的运动结构特点,即各个关节之间相互耦合和随形位变化的事实。
如果对于更高性能要求的机器人控制,则必须考虑更有效的动态模型、更高级的控制方法和更完善的计算机体系结构。
仅控制机器人离散点上手爪或工具的位姿,尽快而无超调地实现相邻点的运动,对运动轨迹不作控制。
主要技术指标:点位精度、完成运动的时间。
2机器人控制系统结构及工作原理基于PC的Windows操作系统,因其友好的人机界面和广泛的用户基础,而成为基于PC控制器的首选。
采用PC作为机器人控制器的主机系统的优点是:①成本低;②具有开放性;③完备的软件开发环境和丰富的软件资源;④良好的通讯功能。
第三章机器人运动学PPT课件

单位主矢量相对于坐标系{A}的方向余弦组成:
xB
yB
zB
xA
yA
zA
其中:cos cos(xB , xA )
既表示了刚体F在{A}系中的方位,也描述了{B}系在{A}系中的 姿态。
3.1.2.2 坐标变换
一、坐标平移
如图3-5,坐标系{B}与{A} 方向相同,但原点不重合。
图3-5 坐标平移
此式称为平移方程。其中 是B系中的原点在A系中的表示。
xA
OB
30o xB
yA yB 30o
所以有:
cos 300 sin 300 0 0.866 0.5 0
A B
R
R(
z,300
)
sin
300
cos 300
0
0.5
0.866 0
0
0
1 0
0 1
10
A PBO
5
0
最后得: APBAR BP APBO
9.098 12.562
第三章 机器人的运动学
3.1 工业机器人运动学
3.1.1 相关知识回顾
一、行列式和矩阵 1. 行列式按照行(或列)展开法则:行列式等于它的任意一行 (或列)各元素与其对应的代数余子式乘积之和。
2.行矩阵 3.列矩阵 4.矩阵相等:两同型矩阵(行数和列数都相等)对应元素相等。
5.单位矩阵:主对角线元素为1,其它所 有的元素都为0的方阵。 6.矩阵的运算 (1)矩阵的加法:两同型矩阵的对应元素相加。
,它的齐
次坐标就是
,即满足Px=ωPx/ω,Py=ωPy/ω,
Pz=ωPz/ω(ω是非零整数)。可以看出,在三维直角坐标系中,
由于ω取值的不同,一个点的齐次坐标的表达不唯一。
工业机器人运动学课件

BIG DATA EMPOWERS TO CREATE A NEW
ERA
定义与分类
定义
工业机器人是一种可编程、多自 由度的自动化机械业任务。
分类
根据应用领域和功能特点,工业 机器人可分为搬运机器人、焊接 机器人、装配机器人、加工机器 人等。
工业机器人运动学课件
BIG DATA EMPOWERS TO CREATE A NEW
ERA
• 工业机器人概述 • 工业机器人运动学基础 • 工业机器人关节结构与运动特性 • 工业机器人运动学建模 • 工业机器人轨迹规划 • 工业机器人控制技术 • 工业机器人应用案例分析
目录
CONTENTS
01
人工操作成本。
THANKS
感谢观看
位置控制与速度控制
位置控制
通过设定目标位置,控制器计算出机 器人需要执行的路径和动作,使机器 人准确到达目标位置。
速度控制
通过设定目标速度,控制器计算出机 器人需要执行的动作,使机器人在运 动过程中保持恒定的速度。
力控制与力矩控制
力控制
通过设定目标力,控制器计算出机器人需要执行的路径和动作,使机器人施加的目标力作用于被操作 物体上。
学要求。
轨迹规划的分类
根据运动学和动力学模型的不同 ,轨迹规划可以分为运动学轨迹
规划和动力学轨迹规划。
轨迹规划的步骤
包括路径生成、速度和加速度控 制、碰撞检测和避障等。
关节空间的轨迹规划
01
关节空间定义
关节空间是指机器人的各个关节角度构成的坐标系,是机器人的内部状
态空间。
02 03
关节空间轨迹规划方法
逆运动学模型
已知机器人末端执行器的位置和姿态,求解对应的关节变量。
基于SolidWorks六自由度焊接机械手三维运动模拟PPT答辩稿

致 谢
感谢指导老师在此设计过程中给予
了热情诚恳的帮助和各位老师的精 心指导,限于水平有限,有遗漏和 错误之处希望各位老师批评指证
1.6焊接机械手的工作原理
固定机座后通过机身上转台的旋转和大小 手臂的运动带动旋转手腕的转动和摆动手 腕的运动,在给手抓一个配合尺寸使之能 够自由的伸缩以便夹取工件。
1.7 焊接机械手的构成和设计
焊接机械手的零部件包括:机座、机座盖板、 机身、转台、大臂、小臂、旋转手腕、摆 动手腕、手抓、销钉、螺栓、螺母等 。
SolidWorks数字化模型 →模型导入→添加复 杂约束力→仿真分析→模型优化。
六自由度机械手的运动情况给出各个转动 副的旋转角度
2.1 模拟加载与仿真
启动SolidWorks软件,如下图选择“装配图” 选项,单击“确定”按钮,建立装配体操 作界面。
2.2机构的装配过程
选择左下方“浏览”按钮如图,打开零件存放的目录,选择第一 个零件系统将默认为固定的零件,以后添加的零件依次为基准。 先选择名称为转台的零件,单击“打开”。单击界面任何位置零 件固定在界面中。在工具栏中选择“插入零部件”,如前操作打 开文件夹,继续选择零件大臂。为了不至于零件过多装配过程复 杂,采取逐个添加约束的方法,进行逐个配合并完成定位。继续 添加零件和配合的操作直到完成装配体。装配过程中合理的选择 配合关系以方便以后的运动仿真操作。如下图
基于SolidWorks六自由度 焊接机械手三维运动模拟
学生姓名:马俊 专业:机械设计制造及其自动化 指导教师:刘天祥
本课题的主要研究内容
(1)查阅机器人技术相关文章和机构,了 解国内外焊接机器人的应用和发展。 (2)画出六自由度焊接机械手部装配图。 (3)应用solidworks对机械手部分进行三维 运动。 (4)用COSMOSMotion软件对其进行仿真。
工业机器人的运动学PPT课件

手部坐标系X′轴的方向可用单位矢量n
来表示:
α=90°,β=180°,γ=90°
n: n=cosγ=0
同理,手部坐标系 Y′轴与 Z ′轴的方向可分别用单位矢量 o 和 a 来表示,
根据式(2-8)可知,手部位姿可用矩阵表达为
0 -1 0 1
T=[n o a p]= -1 0 0 1
0 0 -1 1
0 精选PPT课件 0 0 1
11
2.2齐次变换及运算
刚体的运动是由转动和平移组成的。为了能用同一矩阵 表示转动和平移,有必要引入(4×4)的齐次坐标变换矩阵。
一、平移的齐次变换
首先,我们介绍点在空间直角坐标系中的平移。
如图所示,空间某一点A ,坐标为( x , y ,z),当它平移至
a=cosα, b=cosβ, c=cosγ 图中矢量v所坐落的点O为坐标原点,可用(4×1)列
精选PPT课件
5
例2-1 用齐次坐标写出图2-3中矢量 u 、v、w 的方向列阵。
解 矢量 u: cosα =0, cosβ =0.7071067, cosγ =0.7071067 u=[0 0.7071067 0.7071067 0] T 矢量 v: cosα =0.7071067, cosβ =0, cosγ =0.7071067 v=[0.7071067 0 0.7071067 0] T 矢量 w: cosα =0.5, cosβ =0.5, cosγ =0.7071067 w=[0.5 0.5 0.7071067 0] T
系{B}的位姿来表示,如图所示。
手部的位姿可用(4×4)矩阵 表示为:
nx ox ax px [ n o a p ]= ny oy ay py
《工业机器人技术及应用》教学课件—03工业机器人运动学和动力学

规定:
①列阵[a b c 0]T中第四个元素为零, 且a2+b2+c2=1, 表示某轴(或某矢量)的方向;
图3-2 坐标轴方向的描述
②列阵[a b c ω]T中第四个元素不为零, 则表示空间某点的位置。
3.1 工业机器人的运动学
例如, 在图3-2中, 矢量v的方向用(4×1)列阵表示为
其中: a=cosα, b=cosβ, c=cosγ。
当α=60°, β=60°, γ=45°时, 矢量为
3.1 工业机器人的运动学
4. 动坐标系位姿的描述就是用位姿矩阵对动坐标系原点位
置和坐标系各坐标轴方向的描述。该位姿矩阵为(4×4)的方 阵。如上述直角坐标系可描述为:
3.1 工业机器人的运动学
5. 刚体位姿的描述 机器人的每一个连杆均可视为一个刚体, 若给定了刚体
(3-1)
图3-1 点的位置描述
其中, px、 py、pz是点P的三个位置坐标分量。
3.1 工业机器人的运动学
2. 点的齐次坐标 如用四个数组成的(4×1)列阵表示三维空间直角坐标系
{A}中点P, 则该列阵称为三维空间点P的齐次坐标, 如下:
(3-2)
齐次坐标并不是惟一的, 当列阵的每一项分别乘以一个
X
同理,手部坐标系Y’与Z’轴的方向可分别用单位
矢量o和α 来表示。
手部位姿可用矩阵表达为:
3.1 工业机器人的运动学
7. 目标物位姿的描述 任何一个物体在空间的位置和姿态都可以用齐次矩阵
来表示, 如图3-5所示。楔块Q在(a)图的情况下可用6个点 描述,
图 3-5 目标物的位置和姿态描述
3.1 工业机器人的运动学
的旋转如图3-8所示。A(x, y,
六足机器人行走机构答辩

• (1)可以毫无限制的提高腿的尺寸,从而说整个身体能站的比较高 • (2)不会因腿部放大而放大整个机器人结构 • 不过设计时发现垂直机构虽然足端轨迹好,但受力不好,走动过程中生六组机器人六条腿都在地面上也 就是处于支撑相,看到机器人的重心 在C1的地方,B组的支撑机身重量,A 腿摆动。
• 仿生六足机器人再次同时在地面上, 发现重心到了C2的位置,A、B组都 支撑机身体重,机身向前移动了L长 度。
• 仿生机器人A组靠地面时候,B组开 始动作,重心仍然不变,所有的状态 回到初始,这就是一个周期,运动起 来这就是一个循环往复的过程。
• 歩态规划简述:昆虫大多是采用的六足纲的 原理来行走,可以看作两个状态,当腿抬离 地面的时候就叫作悬空相和当腿接触到地面 推动机体前行的时候就叫做支撑相,悬空时 的状态记作1,支撑时候状态就记住0.一个腿 运动完一个完整的周期循环所需要的时间就 叫作一个运动周期。腿的运动周期相同,当 周期变换的时候,腿就不同运动。
• (3)执行机构最终保证整个机 器人系统功能的实现。
理论根据与机构选择
• 步行机构对于设计机器人是极为重要的,设计时根据上面的原则及实际三维建 模进行选择,并且根据实际要求进行了设计,上面图示为六足机器人一条腿的 机构简图。
• 图2-1所示实现步行基本动作的契贝谢夫直线机构,主动杆OB转动时,从动杆 端点D端画出包括一段直线的闭合轨迹。这并不是一种实际可行的步行机构, 并不能实现需要的运动,只是表明了一组轨迹,它能够实现腿的抬起、落下及 一段直线运动。它是一个基础,虽然不能实现运动,但却是我们选择这种步行 机构的起源,促使寻找确定可行的方案。主要是参考了鹤式起重机的变幅机构, 和挖土机的臂部结构。