_肌肉工作的原理
人体肌肉工作原理
人体肌肉工作原理人体肌肉的工作原理是指肌肉如何通过收缩和放松来产生力量和控制身体运动的过程。
肌肉是身体内最重要的器官之一,其主要功能之一就是使身体能够移动和保持稳定。
在人体中,肌肉主要分为骨骼肌、平滑肌和心肌。
首先,我们来探讨骨骼肌的工作原理。
骨骼肌通过收缩来产生力量,促使骨骼进行运动。
骨骼肌主要由肌纤维组成,每个肌纤维又包含许多肌原纤维。
肌原纤维包含在由神经元控制的肌丝束中,这些神经元称为运动神经元。
当运动神经元向肌肉发出信号时,肌肉开始收缩。
这种信号通过神经冲动在运动神经元与肌原纤维之间传递。
运动神经元释放的神经递质乙酰胆碱,会刺激肌原纤维上的受体,导致肌原纤维上储存在肌浆网(一种内质网)中的钙离子被释放出来。
钙离子的释放使得肌肉肌动蛋白(包括肌球蛋白和肌动蛋白)结合,从而使肌肉纤维产生收缩。
肌肉纤维上的肌原纤维会重复此过程,导致肌肉整体上的收缩。
当运动神经元停止释放信号时,肌纤维会恢复松弛状态。
这是因为肌原纤维上的钙离子会被肌浆网收回,不再结合肌球蛋白和肌动蛋白。
肌浆网还会通过钙泵将剩余的钙离子重新储存在肌浆网中。
这样,肌肉就能重新变得松弛。
平滑肌和心肌的工作原理与骨骼肌有所不同。
平滑肌和心肌都属于不受意识控制的肌肉类型,其收缩和放松是通过自律性细胞产生的电活动引起的。
平滑肌主要存在于内脏器官的血管、消化道和呼吸道等部位。
当由内脏器官的自律性细胞产生的电活动达到阈值时,会引发肌细胞间的电传导,导致整个肌肉组织的收缩。
平滑肌的收缩速度相对较慢,但可以产生持久的收缩力量。
心肌位于心脏中,是负责推动血液流动的关键。
自律性细胞在心脏中形成传导系统,该系统可自主产生和传导电信号。
这些电信号刺激心肌细胞的收缩,使心脏能够有效地将血液泵送到全身各个组织和器官。
总的来说,人体肌肉的工作原理是通过收缩和放松来产生力量和控制身体运动。
骨骼肌通过神经冲动和钙离子的释放来实现收缩和放松,而平滑肌和心肌则通过自律性细胞的电活动来实现这一过程。
肌肉工作原理

肌肉工作原理肌肉是人体最重要的组织之一,它们负责支撑身体、维持姿式、产生力量和运动。
了解肌肉的工作原理对于理解人体运动和锻炼训练非常重要。
本文将详细介绍肌肉的结构、类型和工作原理。
一、肌肉结构肌肉由肌纤维组成,肌纤维又由肌原纤维构成。
肌原纤维是肌肉的基本单位,它们由许多肌肉细胞(肌细胞)组成。
肌细胞内含有许多肌纤维束,每一个肌纤维束由许多肌纤维罗列而成。
肌纤维是由肌纤维蛋白组成的,其中包括肌球蛋白和肌动蛋白。
肌球蛋白和肌动蛋白通过化学反应形成交叉桥,当肌肉收缩时,交叉桥会拉动肌动蛋白,使肌纤维缩短。
二、肌肉类型人体内存在三种主要类型的肌肉:骨骼肌、平滑肌和心肌。
1. 骨骼肌:骨骼肌是与骨骼相连的肌肉,它们通过肌腱与骨骼相连。
骨骼肌是我们主要的运动肌肉,它们能够主动收缩和放松,产生力量和运动。
2. 平滑肌:平滑肌分布在内脏器官、血管壁等处,它们是无意识控制的肌肉。
平滑肌的收缩和放松调节了内脏器官的功能,如消化、呼吸和循环。
3. 心肌:心肌是心脏的肌肉组织,它具有自主收缩的能力。
心肌的收缩和放松推动了血液的循环,维持了人体的生命活动。
三、肌肉工作原理肌肉的工作原理可以归纳为肌肉收缩和放松。
1. 肌肉收缩肌肉收缩是指肌肉纤维的缩短。
当神经系统向肌肉发送信号时,肌肉细胞内的钙离子浓度会上升。
这些钙离子与肌球蛋白结合,使肌动蛋白上的交叉桥与肌球蛋白发生作用。
交叉桥拉动肌动蛋白,使肌纤维缩短。
这个过程称为肌肉收缩。
肌肉收缩的力量和速度取决于交叉桥的数量和频率。
当肌肉需要产生更大的力量时,神经系统会发送更多的信号,激活更多的肌纤维。
当肌肉需要产生更快的运动时,交叉桥的频率会增加。
2. 肌肉放松肌肉放松是指肌肉纤维的伸长。
当神经系统住手向肌肉发送信号时,钙离子浓度会降低,交叉桥与肌球蛋白解离。
肌肉纤维恢复到原始长度,肌肉放松。
肌肉放松的速度和程度也受到神经系统的控制。
当肌肉需要保持紧张状态时,神经系统会持续发送信号,使肌肉保持收缩状态。
肌肉的工作原理
肌肉的工作原理
肌肉的工作原理是由神经系统和肌肉组织协同作用的结果。
当神经系统接收到运动指令后,会通过神经纤维将信号传递到肌肉细胞。
肌肉细胞内有被称为肌纤维的结构,它是由许多蛋白质分子组成的。
其中最重要的两种蛋白质是肌动蛋白和肌球蛋白。
肌动蛋白排列成长短不一的纤维,而肌球蛋白则位于肌动蛋白的间隙中。
当神经系统传递的信号到达肌肉细胞时,释放的神经递质(如乙酰胆碱)将与肌肉细胞上的受体结合,从而引发一系列的电化学反应。
这些反应会导致肌球蛋白的构象发生变化,使得肌动蛋白能够与肌球蛋白结合。
当肌动蛋白与肌球蛋白结合后,肌细胞中的ATP(三磷酸腺苷)会被水解为ADP(二磷酸腺苷)和无机磷酸盐。
这个过
程会释放出能量,进而使肌动蛋白和肌球蛋白形成的结构滑动。
由于肌肉组织中有许多这样的肌动蛋白和肌球蛋白结构,它们的滑动和重组使整个肌肉细胞产生收缩。
收缩时,肌肉细胞腰缩短,同时产生的力量会转化为运动或保持姿势。
当神经系统停止传递信号时,肌肉细胞就会松弛。
这是因为神经递质的释放停止,导致肌钙蛋白复位并且肌动蛋白和肌球蛋白的结合解除。
肌肉的工作原理可以总结为肌动蛋白和肌球蛋白之间的滑动和重组,从而导致肌肉收缩。
这一过程需要神经系统的指令和能量供应。
健身塑形的肌肉工作原理
健身塑形的肌肉工作原理
健身塑形的肌肉工作原理,可以从以下几个方面来解释:
1. 肌肉适应原理:人体肌肉在面对适度负荷的训练刺激时,会适应性地增长和变强。
当肌肉受到拉伸或阻力时,肌肉纤维会发生微小的损伤,导致肌肉组织的修复和增长。
通过不断地训练,肌肉会逐渐适应负荷,增加肌纤维数量和大小,从而实现塑形效果。
2. 肌肉收缩原理:肌肉通过神经系统的刺激,产生肌纤维的收缩,从而实现肌肉运动。
在力量训练中,增加负荷可以刺激更多的肌纤维参与运动,从而使肌肉更加紧实和有力。
3. 蛋白质合成原理:蛋白质是构成肌肉组织的关键成分,而健身塑形需要通过合成更多的蛋白质来增加肌肉质量。
通过摄入足够的蛋白质和进行适当的训练,可以促进肌肉蛋白质的合成,从而增加肌肉的体积和强度。
4. 脂肪燃烧原理:健身塑形不仅仅是增加肌肉质量,还需要减少体脂肪含量,使肌肉更加明显。
有氧运动如慢跑、游泳等可以提高心肺功能,促进脂肪燃烧。
同时,增加肌肉量也能提高基础代谢率,使身体更有效地消耗脂肪。
综上所述,健身塑形的肌肉工作原理主要涉及肌肉的适应性增长、肌肉的收缩、蛋白质合成和脂肪燃烧等方面。
通过合理的训练和营养摄入,可以实现肌肉质量的增加和塑形效果的达成。
肌肉工作原理
肌肉工作原理肌肉是人体内重要的组织之一,它负责身体的运动和姿势的维持。
了解肌肉工作的原理对于理解人体运动和健康非常重要。
本文将详细介绍肌肉工作的原理,包括肌肉结构、肌肉收缩机制和肌肉生长过程。
一、肌肉结构肌肉由肌肉纤维组成,肌肉纤维又由肌原纤维构成。
肌原纤维是肌肉的基本单位,它们由肌纤维束组成,每个肌纤维束内含有多个肌原纤维。
肌原纤维内部有许多肌纤维小束,每个肌纤维小束由多个肌纤维构成。
肌原纤维内的肌纤维小束是肌肉收缩的基本单位。
二、肌肉收缩机制肌肉的收缩是通过肌原纤维内的肌纤维小束的收缩实现的。
肌纤维小束内的肌纤维由肌纤维小束内的肌原纤维内的肌纤维束内的肌原纤维收缩实现。
肌纤维内的肌原纤维内的肌纤维束内的肌原纤维内的肌纤维小束内的肌纤维通过肌纤维小束内的肌原纤维内的肌纤维束内的肌原纤维内的肌纤维小束内的肌纤维的收缩实现。
这个过程是通过肌肉中的肌肉蛋白质相互作用而实现的。
肌肉蛋白质主要包括肌球蛋白和肌动蛋白。
肌动蛋白由肌纤维内的肌原纤维内的肌纤维束内的肌原纤维内的肌纤维小束内的肌纤维内的肌动蛋白组成。
肌动蛋白和肌球蛋白之间的相互作用是肌肉收缩的关键。
当神经系统向肌肉发送信号时,肌肉纤维内的肌纤维小束内的肌纤维束内的肌原纤维内的肌纤维会释放钙离子。
这些钙离子与肌动蛋白结合,使肌动蛋白发生构象改变,与肌球蛋白结合。
这个过程会导致肌肉纤维的收缩。
三、肌肉生长过程肌肉的生长是通过肌肉纤维的增长实现的。
当肌肉受到负荷刺激时,肌肉纤维会发生微小的损伤。
身体会通过修复这些损伤来增加肌肉的大小和力量。
在肌肉受到负荷刺激后,身体会释放一种称为生长因子的化学物质。
这些生长因子会促进肌肉纤维内的蛋白质合成,并促进肌肉纤维的增长。
此外,身体还会增加肌肉纤维内的线粒体数量和肌肉纤维的血液供应,以支持肌肉的增长和修复。
肌肉的生长还受到饮食和训练的影响。
合理的饮食可以提供足够的营养物质,如蛋白质和碳水化合物,以支持肌肉的生长。
肌肉工作原理原理
肌肉工作原理原理
肌肉的工作原理是由肌肉纤维的收缩和放松来实现的。
肌肉由许多肌纤维组成,每个肌纤维由许多肌原纤维组成。
肌原纤维内部包含许多肌纤维束,每个肌纤维束内有许多肌纤维小束,每个肌纤维小束内有许多肌纤维丝。
肌肉收缩是由肌纤维丝中的蛋白质分子间的交互作用来实现的。
在肌原纤维内,肌肉收缩的基本单位是肌节。
每个肌节内有两种蛋白质分子:肌动蛋白和肌球蛋白。
当神经冲动到达肌肉纤维时,肌细胞内的钙离子浓度升高,钙离子与肌球蛋白结合,使之与肌动蛋白相互作用。
这种作用导致肌纤维丝的相互滑动,使肌肉纤维缩短,即产生肌肉收缩。
当神经冲动停止时,钙离子浓度降低,肌球蛋白与肌动蛋白的结合解除,肌纤维丝之间的滑动停止,肌肉纤维恢复原状,即放松状态。
肌肉的收缩和放松是通过神经系统控制的。
人体内的神经系统通过监测肌肉的张力和长度来调节神经冲动的频率和强度,从而控制肌肉的收缩和放松。
肌肉工作原理中还包括能量的转化和供应,以及肌肉的协调运动等方面的机制。
人体肌肉如何产生的原理
人体肌肉如何产生的原理
人体肌肉产生运动的原理是由于肌肉受到神经电刺激而收缩。
当大脑发送神经信号到肌肉,肌肉纤维中的肌动蛋白会与线粒体内的能量分子ATP相互作用,将ATP分解为ADP和磷酸,释放出能量。
这个能量将用于收缩肌肉纤维。
肌动蛋白中的肌球蛋白将与ATP结合形成肌桥,然后与肌球蛋白对应位点上的肌动蛋白结合,最终肌肉纤维缩短并产生力量。
当神经信号停止时,肌动蛋白上的肌桥将解离,肌肉纤维恢复伸张状态。
这个过程中需要再次合成ATP以供下一次收缩使用,以及将ADP和磷酸重新合成ATP 的过程被称为肌肉的再生能力。
同时,肌肉的产生力量也与肌肉纤维的类型有关。
肌肉纤维分为两种类型:快收缩肌纤维和慢收缩肌纤维。
快收缩肌纤维能够在短时间内产生高强度力量,但疲劳较快,适合进行爆发力活动。
慢收缩肌纤维则能够持续产生力量,但强度相对较低,适合长时间的持久运动。
肌肉工作原理

肌肉工作原理引言概述:肌肉是人体最重要的组织之一,它们不仅使我们能够进行各种运动活动,还有助于维持我们的姿势和平衡。
了解肌肉工作原理对于理解人体运动机制以及保持健康至关重要。
本文将详细介绍肌肉的工作原理,包括肌肉结构、收缩机制、能量供应以及肌肉的适应性和修复能力。
一、肌肉结构1.1 肌肉组织类型:肌肉组织主要分为骨骼肌、平滑肌和心肌。
骨骼肌连接骨骼并控制骨骼运动,平滑肌存在于内脏器官和血管壁,而心肌则是构成心脏的肌肉组织。
1.2 肌肉纤维结构:肌肉纤维是肌肉的基本单位,由肌原纤维和肌原纤维束组成。
肌原纤维是由肌原纤维束合并而成,每个肌原纤维束由多个肌原纤维平行排列组成。
1.3 肌肉结构层级:肌肉结构从大到小可分为肌肉、肌束、肌原纤维束、肌原纤维和肌纤维。
二、肌肉收缩机制2.1 神经冲动传导:当运动神经冲动到达肌肉纤维时,会引起肌肉收缩。
神经冲动通过神经末梢释放乙酰胆碱,刺激肌纤维膜上的乙酰胆碱受体,从而引发肌肉收缩。
2.2 肌原纤维收缩:肌原纤维中的肌球蛋白和肌动蛋白在钙离子的作用下发生结合和解离,从而引起肌原纤维的收缩和放松。
2.3 肌肉收缩类型:肌肉收缩可分为等长收缩、等张收缩和等速收缩。
等长收缩指肌肉长度不发生变化,等张收缩指肌肉内部张力增加而长度缩短,等速收缩指肌肉长度缩短的速度恒定。
三、肌肉能量供应3.1 肌肉能量储备:肌肉内储存有肌酸磷酸盐和肌糖原等能量储备物质,它们可以在需要时迅速分解为能量供给肌肉收缩。
3.2 肌肉能量产生途径:肌肉能量主要通过三种途径产生,即肌酸磷酸盐系统、无氧糖酵解和有氧氧化。
肌酸磷酸盐系统和无氧糖酵解主要用于高强度、短时间的运动,而有氧氧化则主要用于长时间、低强度的运动。
3.3 肌肉疲劳与恢复:肌肉疲劳是由于长时间、高强度的运动导致肌肉能量耗尽和代谢产物积累。
肌肉恢复主要通过休息和补充能量来实现,以恢复肌肉的功能和适应能力。
四、肌肉适应性和修复能力4.1 肌肉适应性:肌肉通过训练和运动会逐渐适应负荷的增加,从而提高力量、耐力和协调性。
肌肉的运动原理
肌肉的运动原理
肌肉是人体运动的重要组成部分,它们通过收缩和松弛来实现运动。
肌肉的运动原理可以简单地分为三个步骤:兴奋、收缩和放松。
首先是肌肉的兴奋过程。
当大脑接收到运动指令时,它会通过神经纤维向肌肉发出信号。
这个信号传递过程中涉及到神经冲动的传导,也称为兴奋传导。
神经冲动经过神经纤维传递到肌肉纤维的末梢部分,同时释放出乙酰胆碱等神经递质物质。
这些神经递质会刺激肌肉纤维上的受体,导致肌肉纤维内部的细小结构发生改变。
接下来是肌肉的收缩过程。
当神经递质与肌肉纤维上的受体结合后,肌肉纤维内的细胞质释放出储存的钙离子。
钙离子的释放会使肌肉纤维内的肌动蛋白与肌球蛋白结合,形成肌链桥。
当肌链桥形成后,肌肉纤维会发生短缩,即收缩。
这个过程是肌肉的主要力量输出机制。
最后是肌肉的放松过程。
当神经冲动停止传导时,神经递质的作用也会终止,钙离子的释放停止,肌链桥断裂。
这使得肌肉纤维恢复到原来的状态,肌肉放松。
总结起来,肌肉的运动原理是通过神经递质传导、钙离子释放和肌链桥的形成与断裂来实现的。
这一过程使肌肉能够进行收缩和放松,从而实现人体各种运动和动作。
肌肉工作原理
肌肉工作原理肌肉是人体最重要的组织之一,它们能够产生力量和运动。
了解肌肉工作原理对于理解人体运动和训练非常重要。
本文将详细介绍肌肉工作原理的相关知识。
1. 肌肉结构肌肉由肌肉纤维组成,肌肉纤维又由肌原纤维组成。
肌原纤维是肌肉的基本单位,它们由肌肉细胞膜包裹,内含多个肌纤维束。
肌纤维束中存在着肌小节,肌小节是肌肉收缩的基本单位。
2. 肌肉收缩肌肉收缩是肌肉工作的基础。
肌肉收缩的过程中,肌肉纤维中的肌小节发生变化。
当神经冲动到达肌小节时,肌小节释放出乙酰胆碱,刺激肌肉纤维收缩。
肌纤维中的肌原丝滑过肌小节上的肌小节膜,并与肌小节膜上的肌钙蛋白结合。
这个过程会释放肌钙离子,激活肌肉纤维中的肌肉蛋白质。
3. 肌原丝滑过程肌原丝滑过程是肌肉收缩的关键步骤。
当肌肉蛋白质被激活后,肌原丝滑过肌肉纤维中的肌小节。
肌原丝由肌球蛋白和肌球蛋白组成,它们与肌小节膜上的肌钙蛋白结合。
当肌原丝与肌钙蛋白结合时,肌原丝会发生构象变化,使肌肉纤维缩短。
4. 肌肉收缩的力量和速度肌肉收缩的力量和速度取决于肌肉纤维的类型。
人体肌肉纤维可分为慢收缩型(红色肌纤维)和快收缩型(白色肌纤维)。
慢收缩型肌纤维适合长时间持续性的运动,而快收缩型肌纤维适合短时间高强度的运动。
5. 肌肉训练的原理肌肉训练通过刺激肌肉纤维的生长和适应来增加肌肉力量和体积。
肌肉训练可以通过重力训练、抗阻训练和有氧训练等方式进行。
重力训练主要通过负重训练刺激肌肉纤维,使其适应并增长。
抗阻训练则通过提供阻力,使肌肉纤维发生收缩。
有氧训练则可以增强心肺功能和耐力。
6. 肌肉生长的原理肌肉生长是肌肉训练的结果。
当肌肉纤维受到刺激时,身体会释放生长激素和睾酮等激素。
这些激素促进肌肉纤维的生长和修复。
此外,合理的饮食和休息也对肌肉生长起到重要作用。
7. 肌肉适应性肌肉具有适应性,即肌肉在面对不同负荷和训练强度时会适应并增长。
这是因为肌肉纤维在受到刺激后会发生损伤,身体为了修复和增长肌肉纤维,会增加肌肉纤维的数量和大小。
肌肉工作原理
肌肉工作原理肌肉是人体最重要的组织之一,它们不仅使我们能够运动,还起着维持姿式、支撑骨骼和保护内脏的重要作用。
了解肌肉的工作原理对于健身、康复和运动表现的提高至关重要。
本文将详细介绍肌肉的工作原理,包括肌肉结构、肌肉收缩和肌肉生长等方面。
一、肌肉结构肌肉由肌纤维组成,肌纤维由肌原纤维和肌原纤维束构成。
肌原纤维是肌肉的基本单位,它由肌肉细胞组成。
肌原纤维束是由多个肌原纤维组成的束状结构,它们通过肌腱与骨骼相连。
肌原纤维内部含有许多肌纤维,肌纤维则由肌原丝组成。
二、肌肉收缩肌肉收缩是指肌肉产生力量和缩短长度的过程。
肌肉收缩可以分为两种类型:肌原纤维收缩和肌原纤维束收缩。
1. 肌原纤维收缩肌原纤维收缩是肌肉收缩的基本单位。
在肌原纤维中,肌原丝由肌球蛋白和肌动蛋白组成。
当神经冲动到达肌原纤维时,肌原丝中的肌动蛋白与肌球蛋白结合,形成肌桥。
肌桥的形成使肌原纤维缩短,产生力量。
肌原纤维收缩的过程称为横桥循环。
2. 肌原纤维束收缩肌原纤维束收缩是多个肌原纤维同时收缩的过程。
当肌原纤维收缩时,肌原纤维束也会收缩,产生更大的力量。
肌原纤维束收缩的过程称为肌原纤维束收缩。
三、肌肉生长肌肉生长是指肌肉体积和力量的增加。
肌肉生长主要通过肌肉蛋白的合成和降解来实现。
1. 蛋白合成肌肉生长的关键是蛋白质合成。
当肌肉受到刺激时,身体味释放一种叫做生长激素的物质,它能够促进肌肉蛋白的合成。
此外,饮食中的蛋白质也是肌肉生长的重要来源。
蛋白质经过消化吸收后,会被转化为氨基酸,然后通过蛋白质合成途径合成肌肉蛋白。
2. 蛋白降解肌肉生长不仅仅是蛋白质合成的过程,还包括蛋白质降解的过程。
蛋白质降解是指肌肉蛋白分解为氨基酸的过程。
蛋白质降解主要受到一种叫做蛋白酶的酶的调控。
蛋白酶能够降解肌肉蛋白,使其分解为氨基酸。
肌肉生长的关键在于蛋白质合成和降解的平衡。
当蛋白质合成超过降解时,肌肉就会生长。
相反,当蛋白质降解超过合成时,肌肉就会萎缩。
四、肌肉训练肌肉训练是通过刺激肌肉来促进肌肉生长和增强力量的过程。
肌肉会动的原理
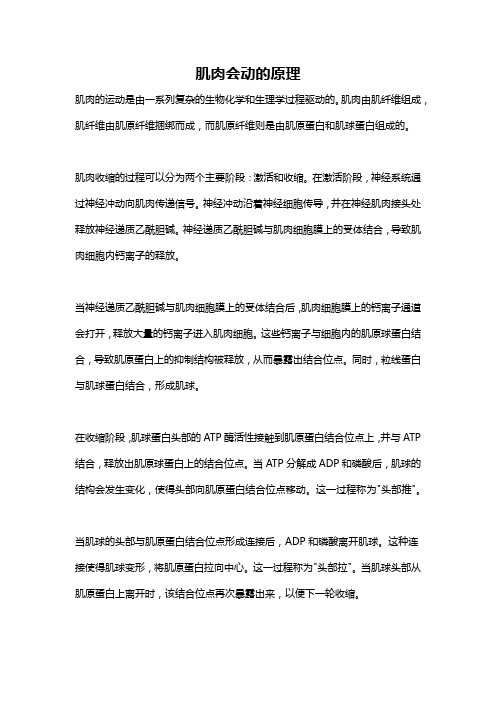
肌肉会动的原理肌肉的运动是由一系列复杂的生物化学和生理学过程驱动的。
肌肉由肌纤维组成,肌纤维由肌原纤维捆绑而成,而肌原纤维则是由肌原蛋白和肌球蛋白组成的。
肌肉收缩的过程可以分为两个主要阶段:激活和收缩。
在激活阶段,神经系统通过神经冲动向肌肉传递信号。
神经冲动沿着神经细胞传导,并在神经肌肉接头处释放神经递质乙酰胆碱。
神经递质乙酰胆碱与肌肉细胞膜上的受体结合,导致肌肉细胞内钙离子的释放。
当神经递质乙酰胆碱与肌肉细胞膜上的受体结合后,肌肉细胞膜上的钙离子通道会打开,释放大量的钙离子进入肌肉细胞。
这些钙离子与细胞内的肌原球蛋白结合,导致肌原蛋白上的抑制结构被释放,从而暴露出结合位点。
同时,粒线蛋白与肌球蛋白结合,形成肌球。
在收缩阶段,肌球蛋白头部的ATP酶活性接触到肌原蛋白结合位点上,并与ATP 结合,释放出肌原球蛋白上的结合位点。
当ATP分解成ADP和磷酸后,肌球的结构会发生变化,使得头部向肌原蛋白结合位点移动。
这一过程称为"头部推"。
当肌球的头部与肌原蛋白结合位点形成连接后,ADP和磷酸离开肌球。
这种连接使得肌球变形,将肌原蛋白拉向中心。
这一过程称为"头部拉"。
当肌球头部从肌原蛋白上离开时,该结合位点再次暴露出来,以便下一轮收缩。
肌肉的收缩过程是通过数以百万计的肌原球蛋白同时进行的。
当肌原球蛋白头部不断推动和拉动肌原蛋白时,肌肉纤维变短,这导致整个肌肉产生收缩。
肌肉放松则是通过神经冲动停止传递和肌肉纤维内钙离子的清除来实现的。
神经冲动停止后,肌肉细胞内的钙离子会被肌浆网重新吸收,肌原蛋白的抑制结构再次覆盖住绑定位点,从而阻止肌球与肌原蛋白的结合。
这使得肌球无法继续推移和拉伸肌原蛋白,从而终止了肌肉的收缩。
总的来说,肌肉的运动是由神经系统通过神经递质的释放和肌肉细胞内的钙离子参与调控的。
当神经冲动到达肌肉细胞时,钙离子的释放对肌肉收缩起到重要作用。
通过肌原球蛋白和肌球蛋白之间的互相作用,肌肉能够产生力量和运动。
肌肉工作原理

一.肌肉的协作关系人们的动作有的很简单,但更多是复杂的动作。
一个简单的动作,往往不是一块肌肉所能完成的,而复杂的体育动作,则在数块或数群肌肉的协调工作下,使环节产生各种各样的运动,或使人体维持某种姿势。
根据肌肉在运动中所起的作用,可分为原动肌、主动肌、次动肌(副动肌)、对抗肌、固定肌及中和肌等。
1.原动肌、主动肌和次动肌直接完成某动作的肌肉叫做原动肌。
如肱肌、肱二头肌、肱桡肌和旋前圆肌4块肌肉是屈肘关节的原动肌。
其中前两块在原动肌中起主要作用,因此叫主动肌;后两块起次要作用,故叫次动肌(或副动肌)。
2.对抗肌与原动肌功能相反的肌肉叫对抗肌。
如肱三头肌就是屈肘关节肌的对抗肌。
当肘关节做伸的动作时,则相反。
3.固定肌将原动肌定点所附着的骨固定起来的肌肉叫固定肌。
如做前臂弯举动作时,肩关节周围的肌肉必须固定肱骨,才能更好地完成这一动作,这时肩关节周围的肌肉就是固定肌。
4.中和肌有的原动肌具有数种功能,如斜方肌除了可使肩胛骨后缩外,还能使它上回旋。
在进行扩胸运动时,只要求肩胛骨后缩,不要求上回旋。
这时有另一些肌肉(如菱形肌和胸小肌)参与工作以抵消斜方肌上回旋的作用,使斜方肌充分发挥肩胛骨后缩的功能。
这些限制或抵消原动肌发挥其他功能的肌肉就叫做中和肌。
有时两块原动肌都具有多种功能,其中有一种(或两种)功能是共同的,其他则是互相对抗的。
如胸大肌可使上臂屈、内收和内旋。
背阔肌可使上臂伸、内收和内旋。
因此胸大肌和背阔肌在上臂内收和内旋方面为原动肌,这时屈、伸方面的功能则相互限制或抵消,因此互为中和肌。
二.肌肉的工作性质肌肉工作性质可分为动力性工作和静力性工作两大类。
1.动力性工作肌纤维紧张持续时间短,收缩和放松不断交替,经常改变拉力角度、方向及骨杠杆的位置,这种工作称为动力性工作。
动力性工作分为向心工作(克制工作)和离心工作(退让工作)两种。
(1)向心工作肌肉收缩克服阻力,肌力大于阻力,使运动环节朝肌肉拉力方向运动的工作叫向心工作。
肌肉的形成原理
肌肉的形成原理
肌肉的形成原理是由肌肉细胞的增长和增加肌纤维所导致的。
肌肉细胞主要由肌纤维束组成,每个肌纤维束都包含着许多肌原纤维。
当肌肉接受到刺激时,肌原纤维内的肌原纤维蛋白会与钙离子发生反应,刺激肌纤维收缩。
在运动和负重训练中,肌纤维会发生微小的损伤,引起肌原纤维断裂并触发身体修复机制。
这时,身体会将更多的蛋白质和其他营养物质输送到肌肉细胞中,用以修复和增长肌纤维。
肌肉细胞的增长也被称为肌肥大。
在肌肉细胞增长的过程中,细胞内的肌原纤维会增加数量,并与肌纤维束中原有的肌原纤维相连。
这使得肌纤维束变得更加庞大和强壮。
同时,肌肉细胞内的蛋白质也会增加,其中包括肌纤维蛋白和其他结构蛋白,以增强肌肉细胞的力量和稳定性。
为了有效地形成肌肉,运动和适当的营养摄入都是必不可少的。
适度的负重训练可以刺激肌肉细胞的生长,而充足的蛋白质摄入可以提供修复和生长所需的营养物质。
此外,良好的睡眠、压力管理和适量的休息也对肌肉的形成和恢复起着重要的作用。
总体而言,肌肉的形成原理是通过肌肉细胞的增长和增加肌纤维来实现的。
这个过程需要适当的刺激、适宜的营养和恰当的休息,才能有效地促进肌肉的发展。
肌肉工作原理
肌肉工作原理肌肉是人体重要的组织之一,它们不仅仅让我们进行各种运动活动,还起着支持身体、保护内脏器官的重要作用。
肌肉工作的原理涉及到肌肉收缩和放松的过程,以及肌肉的结构和神经控制等方面。
本文将详细介绍肌肉工作的原理。
首先,了解肌肉的结构对于理解其工作原理至关重要。
肌肉由肌纤维组成,每个肌纤维又由许多肌原纤维构成。
在肌原纤维中,有许多细长的蛋白丝,即肌动蛋白和肌球蛋白。
当肌肉收缩时,肌动蛋白和肌球蛋白之间的相互作用发生变化,导致肌纤维的长度缩短。
肌肉的收缩是由神经系统控制的。
当我们想要进行运动时,大脑会发出指令,通过神经元向肌肉发送信号。
这些信号通过神经传递到肌肉,刺激肌肉收缩。
每个肌肉都与神经元相连接,这种连接称为神经肌肉接头。
神经肌肉接头是肌肉收缩的关键部位,它将神经信号转化为肌肉收缩的力量。
肌肉收缩可以分为两种类型:无氧收缩和有氧收缩。
无氧收缩是指在短时间内产生大力量的收缩,例如进行重力训练时所使用的力量训练。
这种类型的肌肉收缩主要依赖于肌肉中储存的高能磷酸盐,如肌酸磷酸盐。
当这些高能磷酸盐分解时,释放出能量,促使肌肉收缩。
然而,由于这种能量储存有限,无氧收缩只能持续短时间。
与之相对,有氧收缩是指在较长时间内产生持久而稳定的力量的收缩。
这种类型的肌肉收缩主要依赖于氧气供应和能氧代谢。
当我们进行有氧运动,如慢跑或游泳时,我们的身体会将氧气输送到肌肉中,将葡萄糖和脂肪氧化分解为能量。
这种能氧代谢能够持续长时间,使肌肉能够持续工作。
除了收缩和放松,肌肉还具有伸展和塑造的作用。
通过正确的训练,我们可以增加肌肉纤维的数量和强度,使肌肉更加健壮和有力。
此外,适当的伸展可以保持肌肉的柔韧性和灵活性,预防肌肉损伤和疼痛。
最后,了解肌肉的工作原理对于进行适当的肌肉训练和康复很重要。
通过了解肌肉收缩、放松、连接和伸展等过程,我们可以更好地规划和执行训练计划,提高肌肉的力量、稳定性和耐力。
此外,对于康复患者来说,了解肌肉工作原理可以帮助他们更好地恢复受损肌肉的功能,并预防再次受伤。
肌肉工作原理
肌肉工作原理肌肉是人体中最重要的组织之一,它们不仅使我们能够进行各种运动,还起到支撑和保护身体的作用。
了解肌肉的工作原理对于理解人体运动和康复过程至关重要。
本文将详细介绍肌肉的工作原理,包括肌肉结构、肌肉收缩机制以及肌肉生长的过程。
1.肌肉结构肌肉由肌纤维组成,肌纤维又由肌原纤维组成。
肌原纤维是肌肉的基本单位,它们由许多肌小节组成。
每个肌小节包含一个肌原纤维和与之相连的神经元。
肌原纤维内部有许多肌纤维束,每个肌纤维束由许多肌纤维单元组成。
肌纤维单元中有许多肌纤维蛋白,包括肌球蛋白和肌动蛋白。
2.肌肉收缩机制肌肉的收缩是通过肌原纤维内肌纤维束的肌球蛋白和肌动蛋白之间的相互作用实现的。
当神经元向肌原纤维发送信号时,肌球蛋白会与肌动蛋白结合,形成横桥。
这些横桥会随着肌原纤维的收缩而拉动肌动蛋白,使肌纤维收缩。
这种肌肉收缩的机制被称为滑动蛋白理论。
3.肌肉生长过程肌肉的生长主要是通过肌肉纤维的增长和肌原纤维的增加来实现的。
当我们进行力量训练时,肌肉纤维会受到刺激,导致肌肉纤维的断裂和损伤。
身体会通过修复和重建这些受损的肌纤维,使其更加坚韧和强大。
这个过程被称为肌肉重建。
在肌肉重建过程中,肌原纤维会增加数量,并且肌纤维中的肌球蛋白和肌动蛋白也会增加,从而增加肌肉的力量和体积。
4.肌肉工作原理的应用了解肌肉工作原理对于运动训练和康复治疗都有很大的帮助。
在运动训练中,通过了解肌肉的收缩机制,我们可以制定更科学的训练计划,针对不同的肌肉群进行有针对性的锻炼。
在康复治疗中,了解肌肉的生长过程可以帮助康复师设计更有效的康复方案,加速肌肉的恢复和增强。
总结:肌肉的工作原理是肌原纤维内肌纤维束的肌球蛋白和肌动蛋白之间的相互作用。
肌肉的收缩是通过肌纤维的滑动蛋白理论实现的。
肌肉的生长是通过肌肉纤维的增长和肌原纤维的增加来实现的。
了解肌肉的工作原理对于运动训练和康复治疗都至关重要,可以帮助我们制定更科学的训练计划和康复方案。
肌肉工作原理
肌肉工作原理一、引言肌肉是人体最重要的组成部分之一,它们是我们运动、活动和生存的关键。
肌肉通过复杂的机制和过程来产生运动,这些机制和过程涉及到许多方面,包括肌肉的基本构成、收缩机制、神经控制和能量代谢。
本文将详细介绍肌肉的工作原理,以帮助我们更好地理解人体运动和肌肉功能。
二、肌肉的基本构成肌肉纤维:肌肉主要由肌肉纤维构成,这些纤维是肌肉的基本工作单元。
肌腱:肌腱是连接肌肉和骨骼的结缔组织,它将肌肉产生的力量传递到骨骼上,使身体产生运动。
血液和淋巴系统:肌肉中的血管和淋巴管为肌肉纤维提供营养和氧气,同时带走废物。
神经末梢:神经末梢负责接收来自大脑的信号,传递信息给肌肉纤维,控制肌肉的收缩。
三、肌肉收缩机制肌肉纤维的组成:肌肉纤维由肌丝构成,这些肌丝通过相互作用产生力量,使肌肉收缩。
肌丝滑行理论:当神经冲动到达时,肌细胞膜产生动作电位,传到肌细胞的内部,这时肌细胞中的钙离子会释放出来,激活肌细胞中的收缩蛋白,使肌丝相互作用而产生收缩力。
肌肉类型的差异:人体内的肌肉类型包括红肌、白肌和中间型肌,它们在收缩速度、耐力和力量方面存在差异。
肌肉疲劳:长时间收缩会导致肌肉疲劳,这是由于肌肉中的能量物质减少和代谢产物的积累所引起的。
四、神经对肌肉的控制神经信号的传递:神经信号通过神经纤维传递到肌肉纤维,控制肌肉的收缩。
反射回路:当身体的某些部位受到刺激时,反射回路会迅速地传递信号给肌肉,引起快速而有力的反应。
运动中枢:大脑的运动中枢负责计划和协调身体的运动,它根据感觉输入、当前的运动状态和预期的运动效果来控制肌肉的收缩。
自主神经系统:自主神经系统控制着一些不需要意识参与的自动反应,例如呼吸和心跳等。
五、肌肉的能量代谢碳水化合物和脂肪的氧化:身体通过燃烧碳水化合物和脂肪来产生能量,供肌肉收缩使用。
乳酸的产生与排除:当肌肉收缩而使氧气不足时,糖酵解作用会产生乳酸,乳酸会被排除到血液中。
肌肉工作原理

肌肉工作原理
肌肉是人体内的一种组织,负责产生力量和促使身体运动。
肌肉的工作原理主要涉及肌肉收缩和放松两个过程。
肌肉收缩是指肌纤维中的肌原纤维通过神经冲动的传导而收缩。
当我们想要进行肢体运动时,大脑会发送信号,经过神经系统传递到肌肉细胞。
随着神经冲动的到达,肌细胞中的两种蛋白质分子——肌动蛋白和肌球蛋白,开始相互作用。
肌动蛋白是肌纤维中的一种蛋白质,是由一系列肌纤维排列组成的。
肌球蛋白则连接在肌动蛋白的上面。
当神经冲动到达肌肉细胞时,钙离子从肌腺管中释放出来,并与肌球蛋白结合。
这样一来,肌球蛋白会改变其构象,与肌动蛋白发生作用。
在肌球蛋白和肌动蛋白相互作用时,肌动蛋白会发生变化,使肌肉纤维缩短。
这个过程称为肌肉收缩。
肌肉收缩是靠肌纤维的重叠和滑动来实现的,当肌肉收缩时,肌纤维中肌动蛋白和肌球蛋白的相互作用会不断进行,从而产生力量。
当肌肉的神经冲动停止时,钙离子会被肌腺管重新吸收回去,肌球蛋白恢复原状,肌肉松弛。
肌肉松弛是肌球蛋白和肌动蛋白之间的作用解除,肌肉纤维恢复到伸展状态。
总之,肌肉的工作原理是通过神经冲动的传导、钙离子的释放和肌动蛋白与肌球蛋白的相互作用来实现肌肉的收缩和放松,从而产生力量和促使身体运动。
人体的肌肉原理
人体的肌肉原理人体的肌肉原理是指肌肉在运动过程中产生力量和收缩的机制。
肌肉是由肌纤维构成的,肌纤维又由肌原纤维组成,而肌原纤维中则包含了许多肌球蛋白。
肌球蛋白是肌肉收缩的主要成分,它与肌肉收缩的过程密切相关。
肌球蛋白分为肌动蛋白和肌球蛋白轻链两个部分。
肌动蛋白是由长链和短链组成的,其中长链可以与肌原纤维中的肌球蛋白结合,从而形成肌纤维。
而肌球蛋白轻链则参与肌肉收缩的过程中调控肌动蛋白与肌原纤维的相互作用。
肌肉的收缩过程可以分为两个阶段,即肌肉的兴奋和肌肉的收缩。
在肌肉的兴奋阶段,神经冲动通过神经元传递到肌肉纤维,触发肌肉兴奋。
这一过程中,乙酰胆碱释放到神经肌肉接头,使神经冲动能够跨越神经肌肉接头,进而传导到肌纤维中。
接着,神经冲动导致肌纤维中钙离子的释放。
肌肉纤维中存在着肌浆网,其中储存着大量的钙离子。
当神经冲动传导到肌纤维时,肌浆网释放出钙离子,钙离子会与肌动蛋白结合,从而改变肌肉的构象。
在肌肉的收缩阶段,肌动蛋白和肌原纤维之间的相互作用发生改变,进而使肌肉开始收缩。
在未受刺激的情况下,肌动蛋白上的肌球蛋白轻链阻碍了肌动蛋白与肌原纤维的结合。
但是,当钙离子结合到肌球蛋白上的肌动蛋白部分时,肌球蛋白轻链会发生构象改变,从而使肌动蛋白与肌原纤维结合。
当肌动蛋白与肌原纤维结合后,肌原纤维开始收缩。
肌原纤维中的肌动蛋白头部会在ATP的作用下释放能量,引起其与肌原纤维的移动。
当有足够的ATP时,肌原纤维会继续收缩。
当ATP不再供应时,肌原纤维会停止收缩并保持原位。
另外,肌肉的力量与肌肉纤维的排列方式也息息相关。
肌肉纤维可以分为平行排列的并行肌纤维和交错排列的串联肌纤维。
并行肌纤维由许多纵向排列的纤维组成,适合进行力量和速度型的运动;而串联肌纤维则是由许多横向交错排列的纤维组成,适合进行耐力和持久型的运动。
总之,人体肌肉的原理是由肌动蛋白和肌球蛋白等成分组成的,其收缩过程受到神经冲动和钙离子的调控。
肌肉收缩的力量和方式则受到肌肉纤维的排列方式和ATP的供应等因素的影响。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
肌拉力的合成:
? 单头肌的拉力方向与肌腱方向一致。多头肌的各头拉 力向虽然不完全一致,但都集中在合并腱上,也就是 说已经自然合成了,如股四头的四个腱首先集中在骼 骨上,形成一条肌腱。
? 对不同拉力方向的肌肉之间,可采用平行四边形法进 行合成,以求出它们的合力作用线,从合力作用线到 关节中心的垂直距离,叫做合力力臂。合力与合力力 臂的乘积,叫做合力矩。但拉力方向不同,就可采用 平行四边形法进行合成。以确定两肌的合力作用线(图 2-10) 。aC 为胸大肌的拉力线,ab 为背阔肌的拉力线, ad 为胸大肌和背阔肌和背阔肌的合力作用线。
第四讲 肌肉工作的基本理论
第三讲 肌肉工作的基本理论
? 3 肌肉工作的力学原理 ? 3.1 人体运动的杠杆原理 ? 3.2 肌肉收缩过程中力的变化 ? 4 肌肉的协作关系和工作分类 ? 4. 1 肌肉在运动中的不同作用 ? 4. 2 肌肉收缩的形式 ? 4. 3 肌肉工作性质的分类 ? 4. 4 单关节肌和多关节肌
肌拉力两个分力比值的变化
? 1 .肌拉力角的概念:从肌肉的动点 (肌肉 的运动骨上的附着点 )到关节中心(转动支点)连 一直线,该直线与肌拉力线之间的夹角,叫肌 拉力角(图2-) 。
? 肌拉力角大,力臂就大,力矩就会相应增大, 骨杠杆的转动效率就高。
? 在进化过程中,一些大块肌肉通过突起的骨 结构(如结节、粗隆、嵴和籽骨等 )来增大肌拉 力角,以提高环节的转动效应。
图3-3-12 第一类杠杆(平衡杠杆)
人体骨杠杆的分类
? 2 .省力杠杆:阻力点位于力点和支点之 间的杠杆称省力杠杆。例如,站立提踵 时,以跖趾关节为支点,力点在跟结节 的小腿三头肌止点,阻力点在重心垂线 上,位于支点和力点之间(图4 ——)。
人体骨杠杆的分类
? 3 .速度杠杆:力点在支点和阻力点之间 的杠杆称速度杠杆。例如,负重弯举动 作,以肘关节为支点,重物、前臂和手 的合重心为阻力点,肱二头肌的止点桡 骨粗隆是力点,位于支点和阻力点之间 (图)。
中心到肌拉力线的垂直距离 ( 图2-3 中的OA)阻力臂--从支点到阻力作用线的垂直距离,叫阻力臂。骨杠杆的阻力臂,
是从关节中心到阻力作用线的垂直距离 (图2-3 中的OR) 。阻力臂通常用“ dR ”表
示。
?
6. 力矩--力与力臂的乘积叫力矩。力矩越大,对杠杆转动的作用就越大,转
通常用“ F”表示。( 图2-3)
? 3. 阻力点一 —阻力作用点叫阻力点。骨杠杆上所受的阻力,包括环节自身的重力 和环节负荷的阻力 ( 重力及其他对抗力 ) 等。这些阻力的合力作用点就是阻力点, 阻力点通常用“ R ”表示(图2-3) 。
?
4. 力臂--从支点到肌拉力线的垂直距离,叫力臂。骨杠杆的力臂,是从关节
力对骨杠杆的作用,有必要对肌拉力进 行分解研究,肌拉力线可能在一个基本 平面内,也可能不在一个基本平面内。
肌拉力线在一个基本平面内的分 解:
? 当肌拉力线在某一基本平面时,可以分 解成两个互相垂直的分力,其中一个分 力沿着骨杠杆指向关节中心,叫做法向 分力,法向分力有加固关节的作用,所 以又叫加固分力。另一个分力叫做切向 分力,该分力使骨杠杆绕关节轴转动, 所以又叫转动分力(图2-9) 。转动分力是 关节运动的动力。
4.4.1 单关节肌 ? 4.4.2 多关节肌 ? 4.4.3 多关节肌的特点 ? 4.4.4 多关节肌和单关节肌的协作关系
3 肌肉工作的力学原理
? 3.1 人体运动的杠杆原理 ? 3.2 肌肉收缩过程中力的变化
3.1 人体运动的杠杆原理
? 人体运动中的骨杠杆 ? 在力学中,把在力的作用下能绕支点
? 3. 有时还可利用增大阻力臂的方法,来增大动 作难度,提高训练效果。如用仰卧起坐练习训 练腹肌力量,可选用手抱头的方法来提高训练 效果(图)。
图3-3-16 提铃时杠铃贴近身体上升缩短阻力臂,省力
图3-3-23直腿仰卧起坐
3.2 肌肉收缩过程中力的变化
? 肌拉力的分解与合成 ? 肌拉力的分解:为了进一步了解了肌拉
转动的棒叫做杠杆。在人体运动中,骨 在肌肉拉力的作用下,能绕关节轴转动 并克服阻力作功。因此,我们可将骨视 为骨杠杆。
骨杠杆作功的常用名词概念如 下:
?
1. 支点--杠杆转动时的支撑点,称为支点。骨杠杆的支点位于关节的中心,
支点一般用“ 0 ”表示( 图2-3) 。
?
2. 力点--动力作用点叫力点。骨杆杆的力点就是原动肌的动点附着点,力点
动速度就快。力矩用“ M ”表示, F代表力,d代表力臂。则力矩公式如下:
?
M=Fd
?
7. 阻力矩--阻力与阻力臂的乘积,叫阻力矩。阻力矩用“ MR ”表示,用 R 代
表阻力, dR 代表阻力臂。则阻力矩的公式如下:
? MR =R ·dR
人体骨杠杆的分类
? 1 .平衡杠杆:支点位于力点和阻力点之间的杠杆称平 衡杠杆。例如,头与寰椎的连结,支点在寰枕关节, 阻力点为头的重心点位于支点前面,力点在枕外隆凸 斜方肌上部的起点。斜方肌上部纤维的收缩力可以平 衡头的重力,使头处于平衡位(图4 ——)。
图3-3-13 第二类杠杆(省力杠杆图)3-3-14 第三类杠杆(速度杠杆)
图3-3-15 单足站立时髋关节受力图
杠杆原理在人体运动中的应用
? 1 .省力:根据杠杆平衡原理,要想达到省力 的目的,有两个途径:即增大力臂和缩短阻力 臂。
? 2 .获得较大速度:在体育运动中,许多动作 不是要求省力,而是要获得更大速度。通常采 用增大阻力臂的方法,来达到获得速度的目的。
肌拉力不在一个基本平面内的分 解:
? 当肌拉力线不在一个基本平面内时,可分解成 三个互相垂直的分力,这三个分力,分别位于 三个基本平面内。例如,三角肌前部肌纤维的 拉力线,就不在一个基本平面内,它可以分解 成三个互相垂直的分力:一个向的分力;一个 向内的分力;一个向前的分力。向上的分力有 外展作用;向前的分力有屈是臂的作用;向内 的分力有使上臂旋内和内收 (标准姿势时)的作 用,此外,向上和向内的分力还有加固肩关节 的作用。