飞思卡尔第一张
飞思卡尔 01章 微控制器概述

第三阶段(1983~)16位单片机,MCS-96系列(16位处理,含A/D 转换器,功能加强,速度快)
其中:MCS-51系列获得了最为广泛的应用,典型型 号为使用 Intel 8051内核的89C51、89S51……
微型计算机------简称微机;微机技术的发展又形成相互独 立、不同方向的两大分支:
1、通用微机系统---以微处理器为核心(Micro Processor
Unit),强调处理功用,解决多方位需求。表现形式:外设 配备齐全的微机系统
2、单片微机系统---以微控制器为核心(Micro Controller
重庆大学通信工程学院 任勇
MCU与嵌入式系统 MCU技术、FPGA技术和DSP技术,是目
前数字电路系统设计领域公认的三大基础性技 术,以这三类技术形成的应用系统也是目前嵌 入式系统的主要表现形式。
其中MCU技术最为经典、应用成熟、受 众面广。近年来,MCU技术发展迅速,已从传 统设计技术走向现代设计技术,其功能、速度、 资源正在不断加强,更加易于解决电子系统的 嵌入性、微型化、低功耗、高可靠性和低价格 等问题。
重庆大学通信工程学院 任勇
MCU的学习 MCU技术已经成为广大电子工程师和电类专业大学生
必备的技能之一,是学习、理解、提高计算机应用开发能 力的基础学科,应用型新技术发展的基石,其重要性是不 言而喻的。
软硬件并重 领会结构原理、部件功能、常规接口方法 达到能够理解、设计硬件电路和软件程序 勤于实践,勇于创新
Unit),强调控制功用,解决单一问题。表现形式:专用功 能的嵌入式产品
重庆大学通信工程学院 任勇
飞思卡尔单片机教学

3
第三页,共44页。
第3章 MC9S12单片机的内核及片上资源
时钟和锁相环及相关引脚
EXTAL、XTAL:接外部振荡器 RESET:接外部复位,低电平有效 XFC:接锁相环滤波电容 VDDPLL、VSSPLL:锁相环供电引脚。使能电压调整模块 ( VREGEN 上拉)时,该引脚直接去耦电容。
BKGD(MODC)、MODB、MODA:模式选择 NOACC/XCLKS:当前外部总线操作无效
5
第五页,共44页。
第3章 MC9S12单片机的内核及片上资源
模式选择
6
第六页,共44页。
第3章 MC9S12单片机的内核及片上资源
地址数据总线
PORTA和PORTB作为扩展模式下的 数据和地址复用总线,寻址达到 64K范围 窄模式下:PORTA为8位数据总线 宽模式下:PORTA、PORTB为16位数 据总线 PTK为扩展存储器超过64K时用,不扩 展时作为普通I/O口。
30
第3章 MC9S12单片机的内核及片上资源
(2)时钟合成寄存器(SYNR)-低6位有效,有效值0~63。 (3)时钟分频寄存器(REFDV)-低4位有效,有效值0~15。
由锁相环来产生时钟频率的公式:
例如:选用16MHz的外部晶振,若将SYNR设为
2,REFDV设为1,通过公式计算可得 PLLCLK=48MHz。
第三十一页,共44页。
31
第3章 MC9S12单片机的内核及片上资源 (4)时钟产生模块的标志寄存器CRGFLG
实时中断标志位
1=RTI发生了超时中断,向
该位写1清除该中断标志位。
锁相环频率锁定标志
新手教学---飞思卡尔IO初始化设定,详细注释,加个人标注

S12的输入/输入端口(I/O口)I/O端口功能可设置为通用I/O口、驱动、内部上拉/下拉、中断输入等功能。
设置I/O口工作方式的寄存器有:DDR、IO、RDR、PE、IE和PS。
DDR:设定I/O口的数据方向。
IO :设定输出电平的高低。
RDR:选择I/O口的驱动能力。
PE:选择上拉/下拉。
IE:允许或禁止端口中断。
PS:1、中断允许位置位时,选择上升沿/下降沿触发中断;2、中断禁止时且PE有效时,用于选择上拉还是下拉。
I/O端口设置1、A口、B口、E口寄存器(1)数据方向寄存器DDRA、DDRB、DDREDDRA、DDRB、DDRE均为8位寄存器,复位后其值均为0。
当DDRA=0、DDRB=0、DDRE=0 时A口、B口和E口均为输入口。
否则,A口、B口、E口为输出口。
当DDRA、DDRB、DDRE的任何一位置1时,则该位对应的引脚被设置为输出。
例如,将A口设置为输出口,则其C语言程序的语句为:DDRA=0xff;(2)A口、B口、E口上拉控制寄存器PUCRPUCR为8位寄存器,复位后的值为0。
当PUPAE、PUPBE、PUPEE被设置为1时,A口、B口、E口具有内部上拉功能;为0时,上拉无效。
当A口、B口、E口为地址/数据总线时,PUPAE和PUPBE无效。
(3)A口、B口、E口降功率驱动控制寄存器RDRIVRDRIV为8位寄存器,复位后的值为0,此时,A口、B口、E口驱动保持全功率;当RDPA、RDPB、RDPE为1时,A口、B口、E口输出引脚的驱动功率下降(4)数据寄存器PORTA、PORTB、PORTEPORTA、PORTB、PORTE均为8位寄存器,复位后的值为0,端口引脚输出低电平;要使引脚输出高电平,相应端口对应位应该置1。
由于PE0是/XIRQ、PE1是IRQ,因此,PE0和PE1只能设置为输入。
2、H口寄存器(1)H口I/O寄存器PTH任意时间读/写。
当某一引脚对就的数据方向位设置为1时,读操作返回的是这个端口寄存器的值;否则,读的是引脚的值。
飞思卡尔电路
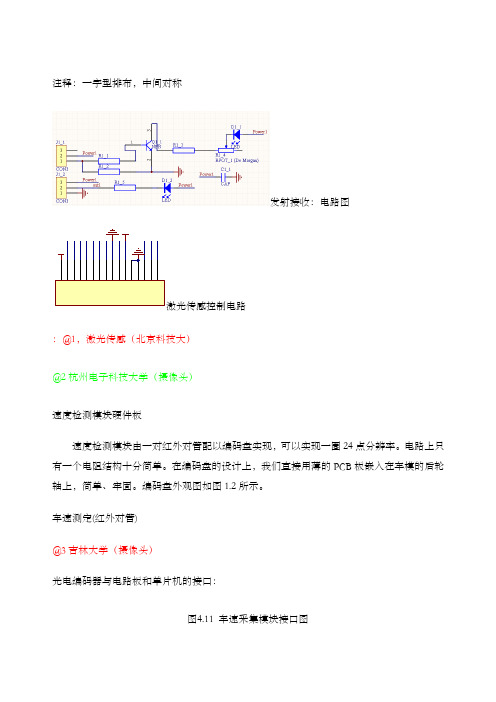
注释:一字型排布,中间对称发射接收:电路图激光传感控制电路:@1,激光传感(北京科技大)@2杭州电子科技大学(摄像头)速度检测模块硬件板速度检测模块由一对红外对管配以编码盘实现,可以实现一圈24点分辨率。
电路上只有一个电阻结构十分简单。
在编码盘的设计上,我们直接用薄的PCB板嵌入在车模的后轮轴上,简单、牢固。
编码盘外观图如图1.2所示。
车速测定(红外对管)@3吉林大学(摄像头)光电编码器与电路板和单片机的接口:图4.11 车速采集模块接口图测速:光电编码器摄像头信号采样电路图:图5.3 摄像头信号采样电路图:5v电压电路合肥工大:光电(两层排布)光栅盘测速,如图3.10 所示。
光栅盘是从机械鼠标上拆下来,总共有50个齿。
将栅盘直接用热熔胶粘接在后轮传动轴上,避免了打滑的可能。
在栅盘的正下方安装槽型光耦(又称光断续器,实际也是红外光电对管)。
当发射的光线被栅齿挡住,接受端管子应该截止,但该栅齿附近间隙仍有光透过并被接受到,所以截止的不够彻底;同理,本该完全导通时也没有完全导通。
所以接收端接受到的信号实际是连续变化的信号,类似于正弦波,而不是理想的脉冲方波信号。
需要在后级信号调理电路中,加上放大级和比较级电路就可得到与TTL电平兼容的脉冲方波信号。
(乐山师范):单个传感器检测电路速度检测:ST150为单光束直射取样式光电传感器,它由高输出的红外光电二极管与高灵敏度光敏晶体管组成北京理工(第二届)(直射型光电传感器方案。
)由速度传感器可以获得一个脉冲信号,该信号直接进入S12 芯片的ETC 模块,经程序计算后便可获得当前车速,其电路原理图如上。
广工一队(第一届)图2.2 红外发射驱动电路图2.3 红外接收电路红外发射管不是同时点亮,而是隔足够远的距离的两个发射管同时点亮。
这样就可以把邻近干扰降到最底了。
实际测量中使用1.6cm长,直径为3mm的黑色套管套住红外接收管时,发射管发射的红外线对相隔一个管的红外接收的干扰几乎已经很小了。
飞思卡尔单片机ppt讲解
单片机(中国)——微控制器MCU(国外)Micro Controller Unit
片上系统 SoC(System on Chip):提高可靠性、降低复杂性、减少硬件尺
寸、降低成本和功耗。
应用系统单片化:总有一款适合你!(几千种) 嵌入式系统ES( Embedded systems ):以应用为中心、以计算机技术
针孔摄像机有线或无线实时传输,可以边 拍边看。这些摄像头都是很小的,最小的 跟手表上装的那种纽扣电池差不多。
1.3 单1.1片计算机机历的分史类与及发新展 技术
单片机的发展
• 20世纪70年代,4位单片机问世 • 第一代(1976一1978年)探索阶段
Intel、Motorola • 第二代(I978一1982年)完善阶段
同时可以实现简单的调试功能,如显示和修改各内部寄存器、显 示和修改内存等。 * 通过PC串口和单片机的串口实现人机对话,可以使单片机的开发 不依赖于任何开发工具(51系列仿真芯片SST89E516) * 占用用户资源(串口、片内RAM和闪存) * 监控程序和应用程序共享一个CPU,因此不能做动态调试。
CPU的集成度已达到千万只晶体管,时钟频率高达GHz
1.3 单片机历史及新技术
计算机的发展动向
1.大型、巨型计算机
2.小型、微型计算机
中国国防科技大学2011年5月公布超级电脑“ 天河一号”,每秒运算速度逾千万亿次,使中国
成为继美国之后第二个能研制千万亿次超级电脑
的国家。该电脑一天的运算量相当于一台主流个 人电脑不间断地计算160年。这套重155吨的先进 系统,由103个冰箱大小的银灰色机柜组成,占地 面积约1000平方公尺。这台超级电脑耗资人民币6 亿元。
飞思卡尔单片机快速上手指南_v01_1
飞思卡尔飞思卡尔单片机快速上手指南单片机快速上手指南飞思卡尔飞思卡尔半导体半导体IMM FAE 团队2014年9月 · 审阅稿飞思卡尔半导体是全球领先的单片机供应商,其单片机产品包含多种内核,有数百个系列。
为支持用户使用这些产品,飞思卡尔提供了丰富的网站资源、文档及软硬件工具,另外,我们还有众多的第三方合作伙伴及公共平台的支持。
对于不熟悉飞思卡尔产品和网站的初学者来说,了解和使用这些资源这无疑是一个令人望而生畏的浩瀚工程。
本指南的目的,就是给初学者提供一个指导,让他们不被这些海量信息淹没;用户根据本指导提供的操作步骤,能迅速找到所需的资源,了解如何使用相关的工具。
在本指南中,我们以飞思卡尔的新一代Kinetis 单片机K22系列为例,介绍了如何获取与之相关的资源,如何对其进行软硬件设计和开发。
实际上,这些方法也适用于其它的单片机系列。
当然,对于其它有较多不同之处的产品,我们也会继续推出相应的文档,供广大用户参考。
目录第一章. 如何获取技术资料与支持 第二章. 如何如何选择选择选择产品产品产品、、申请样片及购买申请样片及购买少量少量少量芯片芯片芯片和和开发工具 第三章. 飞思卡尔飞思卡尔单片机的开发环境单片机的开发环境单片机的开发环境、、开发工具开发工具和生态系统和生态系统 第四章. 如何如何阅读飞思卡尔的技术文档阅读飞思卡尔的技术文档 第五章. 飞思卡尔飞思卡尔单片机硬件设计指南单片机硬件设计指南 第六章. 飞思卡尔飞思卡尔单片机单片机单片机软软件开发开发指南指南第一章第一章 如何如何获取技术资料与支持获取技术资料与支持1.1 概述当用户使用飞思卡尔单片机芯片时,如何获取芯片的数据手册(Datasheet )、参考设计(Reference Manual )和官方例程等资源呢?另外当用户遇到了技术问题该如何获得帮助和解答呢?这里以Kinetis 的K22系列芯片为例为大家介绍如何解决这些问题。
飞思卡尔单片机电子钟课程设计

目录之阳早格格创做第一章系统提要21.1 系统背景21.2 系统功能3第二章系统硬件安排32.1 系统本理图32.2 单片机(MCU)模块42.2.1 MC9S08AW60单片机本能概括42.2.2 里里结构简图52.3 串止通疑模块52.3.1 MAX232引足图52.3.2 串止通疑的电路本理72.4 液晶隐现模块8第三章系统硬件安排93.1 MCU圆(C)步调93.1.2 LCD子步调19第四章系统尝试22第五章归纳预测225.1 归纳225.2 预测22参照文献22第一章系统提要1.1 系统背景数字时钟,当咱们听到那几个字时,第一反应便是咱们所道的数字,不错数字钟便是以数字隐现与代模拟表盘的钟表,正在隐现上它用数字反应出此时的时间,相比模拟钟能给人一种一目了然的感觉,不然而如许它还能共时隐现时、分、秒.而且能对付时、分、秒准确校时,那是一般钟所不迭的.由于单片机集成度下、功能强、稳当性下、体积小、功耗天、使用便当、代价矮廉等一系列便宜,久时已经渗进到人们处事战死计的圆圆里里,险些“无处不正在,无所不为”.单片机的应用范围已从里背工业统造、通讯、接通、智能仪容等赶快死长到家用消耗产品、办公自动化、汽车电子、PC机中围以及搜集通讯等广大范围.1.2 系统功能正在真验箱上有一个开用键,当按下开用键给以一个矮电仄,电子时钟从目前设定值开初走时.按秒刷新,央供正在LCD屏上隐现.若按开用键给以下电仄,则时间久停,再按,时间继承按秒刷新.第二章系统硬件安排2.1 系统本理图该系统由AW60最小系统电路为主要结构,利用串心举止数据的统造与支集.最先将开闭接正在AW60上的PORT_D心上,用于统造数字时钟系统的开闭.而后将LCD 的数据线7-14引足(D0-D7)分别与MCU的PTA0-PTA7对接,LCD的统造线RS、R/W、E(4、5、6引足)分别于MCU的PTC4、PTC6、PTF6对接,用于输出时间.数字时钟必须要有晶振电路,所以将该晶振电路与AW60的PTG5战PTG6贯串,用于时间的自加.由于正在运止系统时,以防电流不宁静,所以正在PTB0端树坐一个下推电阻,宁静电流.2.2 单片机(MCU)模块(1)最下达40MHz的CPU处事频次战20Hz的里里总线处事频次表;时钟源选项包罗晶振、谐振器、中部时钟或者里里爆收的时钟.(2)相比HC08 CPU指令集,S08 CPU减少了BGND指令.(3)单线背景调试模式接心;巩固的断面本收,允许简朴的断面树坐正在线调试(正在片内调试的模块减少了多于二个的断面).(4)内含32其中断/复位源;内含2KB的片内RAM;内含60KB的片内正在线可编程Flash保存器,戴有块呵护战仄安选项.(5)可选的估计机仄常支配(COP)复位;矮电压检测战复位或者中断;非法支配码检测与复位;非法天面检测与复位.(6)ADC:多达16个通道,10位A/D变换器与自动比较功能;二个串止通疑接心SCI模块与可选的13位中断;一个串止中设接心SPI模块;集成电路互连总线I2C模块运做下达100kbps的最下总线背载;8引足键盘中断KBI模块.(7)Timers:1个2通道战1个6通道16位定时器/脉冲宽度调造器模板.具备输进、捕获、输出比较、脉宽调造功能.2.2.2 里里结构简图1. 里里结构简图如图所示,给出了AW60的里里结构图,它对付于咱们明白战应用AW60 MCU有要害效率,正在教习了基础有法后,应正在反过去认识那个里里结构图,以便更佳天明白AW60 MCU的基根源基本理.从里里结构图不妨瞅出,AW60主要有以下几个部分:S08 CPU、保存器、定时器接心模块、定时器模块、瞅门狗模块、通用IO模块、串心通疑模块(SCI)、串止中设接心(SPI)模块、I2C(IIC)模块、A/D变换模块、键盘中断模块、时钟爆收模块、复位与中断模块等.2.3 串止通疑模块2.3.1 MAX232引足图正在MCU中,若用RS-232总线举止串止通疑,则需中接电路真止电仄变换.正在收支端,需要用启动电路将TTL 电仄变换成RS-232电仄;正在担当端,需要用接支电路将RS-232电仄.转移为TTL电仄.电仄变换器不然而不妨由晶振管分坐元件形成,也不妨间接使用集成电路.久时使用MAX232芯片较多,该芯片使用简朴+5V电源供电真止电仄变换.如图所示,给出了MAX232的引足证明.各引足含意简要证明如下:Vcc(16足):正电源端,普遍接+5V.GND(15足):天.V S+(2足):V S+=2V CC-1.5V=8.5V.VS-(6足):V S-=-2VCC-1.5V=-11.5V.C2+、C2-(4、5足):普遍接1μF的电解电容.C1+、C1-(1、3足):普遍接1μF的电解电容.表 MAX232芯片输进输出引足分类与基础接法正在仄常情况下,(1)T1IN=5V,则T1OUT=-9V;T1IN=0V,则T1OUT=9V.(2)将R1IN与T1OUT贯串,令T1IN=5V,则R1OUT=5V;令T1IN=0V,则R1OUT=0V. MAX232芯片举止电仄变换的基根源基本理:(1)收支历程:MCU的TxD(TTL电仄)通过MAX232的11足(T1IN)支到MAX232里里,正在里里TTL电仄被“提下”为232电仄,通过14足(T1OUT)收支进去.担当历程:中部232电仄通过MAX232的13足(R1IN)加进到MAX232的里里,正在里里232电仄被“落矮”为TTL电仄,通过12足(R1OUT支到MCU的RxD,加进MCU里里.2.3.2 串止通疑的电路本理从基根源基本理的角度瞅,串止通疑接心SCI的主要功能是:接支时,把中部的单线输进的数据形成一个字节的并止数据支进MCU里里;收支时,把需要收支的一个字节的并止数据变换为单线输进.为了树坐波特率,SCI应具备波特率寄存器.为了不妨树坐通疑圆法、是可校验、是可允许中断等,SCI应具备统造寄存器.而要相识串心是可罕见据可支、数据是可收支进去等,需要有SCI状态寄存器.天然,若一个寄存器不敷用,统造与状态寄存器大概有多个.而SCI数据寄存器存搁要收支的数据,也存搁担当的数据,那本去不辩论,果为收支与接支的本质处事是通过“收支移位寄存器”战“接支以为寄存器”完毕的.编程时,步调员本去不间接与“收支移位寄存器”战“接支移位寄存器”挨接道,只与数据寄存器挨接道,所以MCU中并不树坐“收支移位寄存器战“接支移位寄存器”的映像天面.收支时,步调员通过判决状态寄存器的相映位,相识是可不妨收支一个新的数据.若不妨收支,则将待收支的数据搁进“SCI数据寄存器”中便不妨了,剩下的处事由MCU自动完毕:将数据从“SCI数据寄存器”支到“收支移位寄存器”,硬件启动将“收支移位寄存器”的数据一位一位天依照确定的波特率移到收支引足TxD,供对付圆接支.接支时,数据一位一位天从接支引足RxD加进“接支移位寄存器”,当支到一个完毕字节时,MCU会自动将数据支进“SCI数据寄存器”,并将状态寄存器的相映位改变,供步调员判决并与出数据.2.4 液晶隐现模块LCD统正在国际上已经典型化,其电个性及接心个性是统一的,果此,只消安排出一种型号的接心电路,正在指令上稍加建改即可使用百般规格的字符型液晶隐现模块.面阵字符型液晶隐现模块的统造器大普遍为日坐公司死产的HD44780及其兼容的统造电路,如SED1278(SEIKO EPSON)、KS0066(SAMSUNG)、NJU6408(NER JAPANRADIO)等.字符型液晶隐现模块的主要个性如下:1.液晶隐现屏是以若搞5*8或者5*11面阵块组成的隐现字符群.每个面阵块为一个字符位,字符间距战止距皆为一个面的宽度.2.主统造电路为HD44780(HITACHI)及其余公司的兼容电路.从步调员的角度去道,LCD的隐现接心与编程是里背HD44780的,只消相识HD44780的编程结构即可举止LCD的隐现编程.3.里里具备字符爆收器ROM,可隐现192种字符(160个5*7面阵字符战32个5*10面阵字符).4.具备64字节的字符爆收器RAM,不妨定义8个5*8面阵字符或者4个5*11面阵字符.5.具备64字节的数据隐现RAM,供隐现编程时使用6.尺度接心个性,与MC9S08系列MCU简单接心.7.模块结构紧密、沉巧、拆置简单.8.单+5V电源供电(宽温型需要加-7V启动电源).9.矮功耗、下稳当性.第三章系统硬件安排3.1 MCU圆(C)步调#include "Includes.h"#include "LCD.h"#include "SCI.h"#include "timer.h"#include "GPIO.h"//正在此增加齐部变量定义uint8 g_time[8];void main(void){uint8 g_DispalyInit[]="00:00:00";uint8 remember;uint32 mRuncount=0;uint8 i;uint8 m;int n=1;//1 闭总中断DisableInterrupt(); //克制总中断//2 芯片初初化MCUInit();//3 模块初初化Light_Init(Light_Run_PORT,Light_Run,Light_OFF); LCDinit();TPMinit(TPM_NUM_1);SCIInit(SCI_NUM_1,SYSTEM_CLOCK,9600);//定时器//内存初初化g_time[0]=0;g_time[1]=0;g_time[2]=':';g_time[3]=0;g_time[4]=0;g_time[5]=':';g_time[6]=0;g_time[7]=0;remember=g_time[7];//开搁中断//LCDLCDshow(g_DispalyInit);while(n){if(GPIO_Get(LCD_Run_PORT,0)==LCD_Run){remember = g_time[7];n = 0;EnableSCIReInt();EnableInterrupt();EnabletimerInt(TPM_NUM_1);}//4 主循环while (!n){if(g_time[7]!=remember){for(i=0;i<8;i++) {if(i==2 || i ==5){g_DispalyInit[i] =g_time[i];}else{m=g_time[i];g_DispalyInit[i]=m+'0';}}LCDshow(g_DispalyInit);SCISendN(SCI_NUM_1,3,g_time); remember=g_time[7];}if(GPIO_Get(LCD_Run_PORT,0)!=LCD_Run){ LCDshow(g_DispalyInit);n = 1;DisableInterrupt();DisableSCIReInt();DisabletimerInt(TPM_NUM_1);}}}}#include "Includes.h"//此处为用户新定义中断处理函数的存搁处#include "timer.h"//此处为用户新定义中断处理函数的存搁处interrupt void isrT1Out(void){DisableInterrupt();SecAdd1(g_time);TPM_CSTR(1) &=~(TPM1SC_TOF_MASK);EnableInterrupt();}//已定义的中断处理函数,本函数不克不迭简略interrupt void isrDummy(void){}//中断处理子步调典型定义typedef void( *ISR_func_t)(void);//中断矢量表,如果需要定义其余中断函数,请建改下表中的相映名目const ISR_func_t ISR_vectors[] @0xFFCC = {isrDummy, // 0xFFCC //时基中断isrDummy, // 0xFFCE //IIC中断isrDummy, // 0xFFD0 //ADC变换中断isrDummy, // 0xFFD2 //键盘中断isrDummy, // 0xFFD4 //SCI2收支中断isrDummy, // 0xFFD6 //SCI2接支中断isrDummy, // 0xFFD8 //SCI2过失中断isrDummy, // 0xFFDA //SCI1收支中断isrDummy, // 0xFFDC //SCI1接支中断isrDummy, // 0xFFDE //SCI1过失中断isrDummy, // 0xFFE0 //SPI中断isrDummy, // 0xFFE2 //TPM2溢出中断isrDummy, // 0xFFE4 //TPM2通道1输进捕获/输出比较中断isrDummy, // 0xFFE6 //TPM2通道0输进捕获/输出比较中断isrT1Out, // 0xFFE8 //TPM1溢出中断isrDummy, // 0xFFEA //TPM1通道5输进捕获/输出比较中断isrDummy, // 0xFFEC //TPM1通道4输进捕获/输出比较中断isrDummy, // 0xFFEE //TPM1通道3输进捕获/输出比较中断isrDummy, // 0xFFF0 //TPM1通道2输进捕获/输出比较中断isrDummy, // 0xFFF2 //TPM1通道1输进捕获/输出比较中断isrDummy, // 0xFFF4 //TPM1通道0输进捕获/输出比较中断isrDummy, // 0xFFF6 //ICG的PLL锁相状态变更中断isrDummy, // 0xFFF8 //矮电压检测中断isrDummy, // 0xFFFA //IRQ引足中断isrDummy // 0xFFFC //SWI指令中断//RESET是特殊中断,其背量由开垦环境间接树坐(正在本硬件系统的Start08.o文献中)};#include "timer.h"void TPMinit(uint8 TPMNo){if(TPMNo > 2)TPMNo = 2;else if(TPMNo < 1)TPMNo=1;TPM_CSTR(TPMNo)=0b00010110; TPM_CNTH(TPMNo) = 0x00;TPM_CNTL(TPMNo) = 0x00;TPM_MODH(TPMNo) = 0x7A;TPM_MODL(TPMNo) = 0x12;}void SecAdd1(uint8 *p){*(p+7)+=1;if(*(p+7)>=10){*(p+7) = 0;*(p+6)+=1;if(*(p+6)>=6){*(p+6) = 0;*(p+4)+=1;if(*(p+4)>=10){*(p+4) = 0;*(p+3)+=1;if(*(p+3)>=6){*(p+3) = 0;*(p+1)+=1;if(*(p+1)>=9){*(p+1) = 0;*p+=1;}if((*p*10+*(p+1))>=24)*p = 0;*(p+1) = 0;}}}}}#ifndef timeR_H#define timeR_H#include "MC9S08AW60.h"#include "Type.h"#define TPM_CSTR(x)(*(vuint8 *)(0x00000020+(x-1)*64))#define TPM_CNTH(x)(*(vuint8 *)(0x00000021+(x-1)*64))#define TPM_CNTL(x)(*(vuint8 *)(0x00000022+(x-1)*64))#define TPM_MODH(x)(*(vuint8 *)(0x00000023+(x-1)*64))#define TPM_MODL(x)(*(vuint8 *)(0x00000024+(x-1)*64))#define EnabletimerInt(x) TPM_CSTR(x) |= TPM1SC_TOIE_MASK#define DisabletimerInt(x) TPM_CSTR(x) &=~TPM1SC_TOIE_MASK#define TPM_NUM_1 1#define TPM_NUM_2 2#define TPM1_CH_0 0#define TPM1_CH_1 1#define TPM1_CH_2 2#define TPM1_CH_3 3#define TPM1_CH_4 4#define TPM1_CH_5 5#define TPM2_CH_0 0#define TPM2_CH_1 1void TPMinit(uint8 TPMNo);void SecAdd1(uint8 *p);#endif#include "SCI.h"void SCIInit(uint8 SCINo, uint8 sysclk, uint16 baud){ uint16 ubgs;ubgs=0;if(SCINo>2){SCINo=2;}ubgs=sysclk*(10000/(baud/100))/16;SCI_BDH(SCINo)=(uint8)((ubgs&0xFF00)>>8);SCI_BDL(SCINo)=(uint8)(ubgs&0x00FF);SCI_C1(SCINo)=0b00000000;SCI_C2(SCINo)=0b00001100;}void SCISend1(uint8 SCINo, uint8 ch) {if(SCINo>2){SCINo=2;}while(!(SCI_S1(SCINo)&0b1000000));SCI_D(SCINo)=ch;}uint8 SCIRe1(uint8 SCINo, uint8 *p) {uint16 k;uint8 i;if(SCINo>2){SCINo=2;}for(k=0;k<0xfbbb;k++)if((SCI_S1(SCINo)&0b00100000)!=0){i=SCI_D(SCINo);*p=0x00;break;}if(k>=0xfbbb){i=0xff;*p=0x01;}return i;}void SCISendN(uint8 SCINo, uint16 n, uint8 ch[]) { uint16 i;if(SCINo>2) {SCINo=2;}for(i=0;i<n;i++)SCISend1(SCINo,ch[i]);}uint8 SCIReN(uint8 SCINo, uint16 n, uint8 ch[]) { uint16 m;uint8 fp;m=0;if(SCINo>2) {SCINo=2;}while(m<n) {ch[m]=SCIRe1(SCINo,&fp);if(fp==1) {return 1;}m++;}return 0;}void SCISendString(uint8 SCINo, char *p){uint32 k;if(SCINo>2) {SCINo=2;}if(p==0) return;for(k=0;p[k]!='\0';++k) {SCISend1(SCINo,p[k]);}}#ifndef SCI_H#define SCI_H#include "MC9S08AW60.h"#include "Type.h"#define SCI_BDH(x) (*(vuint8 *)(0x00000038+(x-1)*8))#define SCI_BDL(x) (*(vuint8 *)(0x00000039+(x-1)*8))#define SCI_C1(x) (*(vuint8 *)(0x0000003A+(x-1)*8))#define SCI_C2(x) (*(vuint8 *)(0x0000003B+(x-1)*8))#define SCI_S1(x) (*(vuint8 *)(0x0000003C+(x-1)*8))#define SCI_S2(x) (*(vuint8 *)(0x0000003D+(x-1)*8))#define SCI_C3(x) (*(vuint8 *)(0x0000003E+(x-1)*8))#define SCI_D(x) (*(vuint8 *)(0x0000003F+(x-1)*8))#define EnableSCIReInt() SCI1C2 |=(SCI1C2_RIE_MASK)#define DisableSCIReInt() SCI1C2 &=~(SCI1C2_RIE_MASK)#define SCI_NUM_1 1#define SCI_NUM_2 2void SCIInit(uint8 SCINo,uint8 sysclk,uint16 baud);void SCISend1(uint8 SCINo,uint8 ch);void SCISendN(uint8 SCINo,uint16 n,uint8 ch[]);uint8 SCIRe1(uint8 SCINo,uint8 *p);uint8 SCIReN(uint8 SCINo,uint16 n,uint8 ch[]);void SCISendString(uint8 SCINo,char *p);#endif3.1.2 LCD子步调#include "LCD.h"#include "GPIO.h"void LCDinit(void) {uint16 i;LCDdataD = 0b11111111;LCDctrlD1 |= (1 << LcdRS);LCDctrlD1 |= (1 << LcdRW);LCDctrl1 &=~(1 << LcdRS);LCDctrl1 &=~(1 << LcdRW);LCDctrlD2 |= (1 << LcdE);LCDctrl2 |= (1 << LcdE);LCDcommand (0b00111000);LCDcommand (0b00001000);LCDcommand (0b00000001);for(i=0;i<4000;i++)asm("NOP");LCDcommand (0b00000110);LCDcommand (0b00010100);LCDcommand (0b00001100);GPIO_Init(LCD_Run_PORT,0,0,0); }void LCDcommand(uint8 cmd){uint16 i;for(i=0;i<1000;i++)asm("NOP");LCDdata=cmd;LCDctrl2 |= (1<<LcdE);asm("NOP");asm("NOP");asm("NOP");LCDctrl2 &=~(1<<LcdE);for(i=0;i<1000;i++)asm("NOP");}void LCDshow(uint8 str[]) {uint8 i;LCDinit();LCDctrl1 &=~(1<<LcdRS); LCDctrl1 &=~(1<<LcdRW); LCDcommand (0b10000000); LCDctrl1 |=1<<LcdRS;LCDctrl1 |=~(1<<LcdRW); for(i=0;i<8;i++) {LCDcommand(str[i]);}}#ifndef LCD_H#define LCD_H#include "MC9S08AW60.h"#include "Type.h"#include "GeneralFun.h"#define LCDdata PTAD#define LCDdataD PTADD#define LCDctrl1 PTCD#define LCDctrlD1 PTCDD#define LCDctrl2 PTFD#define LCDctrlD2 PTFDD#define LcdRS 4#define LcdRW 6#define LcdE 6#define LCD_Run_PORT PORT_E#define LCD_Run 1void LCDinit(void);void LCDcommand(uint8 cmd);void LCDshow(uint8 str[]);void LCDshoww(uint8 str[]);#endif第四章系统尝试调试界里截图:运止界里截图:第五章归纳预测5.1 归纳通过了为期一周半的单片机课程安排,最先是对付与飞思卡我的单片机系统有了一定的相识.由于之前便搞过频频的真验,而且往日也上过C谈话的课程.那次的课程安排,思路很浑晰.课程是搞一个基于LCD隐现的计数器.正在本有LCD液晶步调战计数器步调建改的前提上,通过频频建改战整治,正在中断之前仍旧完毕了此次的安排.LCD上不妨隐现计数.那次的课程安排纷歧样.由于是正在本有步调的前提上建改调整,需要对付本有的步调举止一个真足的相识战深进.那对付与本质的开垦很有助闲.不妨深进相识飞思卡我的安排思路.拓展咱们的思路.课程安排的真质虽然不什么太大的本质意思.然而是,咱们不妨相识到本质开垦的一些步调战思路.对付于以去的处事也很有助闲的吧.每一次的课程安排,皆是一次教习,皆是一次先进.5.2 预测对付于此次课程安排,咱们不过搞了一些简朴的处事.虽然有钻研过飞思卡我的单片机步调,然而是到底自己的知识本收有限.不可能正在短短的一周半时间太过于深进.那一周半的时间,相识了单片机的很多物品吧.对付自己的央供是,要多动脚,自己动脚写代码教习的才更快.对付于编程,瞅他人的百遍不迭自己动脚写一遍.如果大概,期视真足自己动脚安排一个计数器的步调.参照文献【1】王宜怀、弛书籍奎、王林等著,嵌进式技能前提与试验,浑华大教出版社【2】谭浩强著,C谈话步调安排(第四版),北京:浑华大教出版社【3】瞅波著,单片机技能前提及应用,华夏电力出版社【4】开晖著,单片机本理及应用,化教工业出版社【5】弛跃常、戴卫恒著,Freescale系列单片机常有模块与概括系统安排真例粗道,电子工业出版社。
飞思卡尔中文手册

Slide 6
TM
Freescale Semiconductor Confidential and Proprietary Information. Freescale™ and the Freescale logo are trademarks of Freescale Semiconductor, Inc. All other product or service names are the property of their respective owners. © Freescale Semiconductor, Inc. 2005.
内部EEPROM位置初始化寄存器
EEON 1 = EEPROM IS ENABLED 0 = EEPROM IS DISABLED
Slide 7
TM
Freescale Semiconductor Confidential and Proprietary Information. Freescale™ and the Freescale logo are trademarks of Freescale Semiconductor, Inc. All other product or service names are the property of their respective owners. © Freescale Semiconductor, Inc. 2005.
内部寄存器位置初始化寄存器
15 14 13 12
Slide 5
11 10 9 8 0 000
7654 3210 0000 0 0 0 0 0x1000
0
0 0 1
TM
Freescale Semiconductor Confidential and Proprietary Information. Freescale™ and the Freescale logo are trademarks of Freescale Semiconductor, Inc. All other product or service names are the property of their respective owners. © Freescale Semiconductor, Inc. 2005.
飞思卡尔单片机入门

KV31 Cortex M4
VOC BLDC & PMSM Motors with High Dynamic Control
100 MHz
KV30 – Cortex M4
75 MHz
KV1x – CM0+
VOC BLDC & Low End PMSM motors with Low Dynamic Control 64KB 128KB 256KB 512KB
Deep Dive on New Kinetis KV1x MCU for Motor Control
FTF-IND-F0473
Eric Wu | Product Marketing, Microcontrollers William Jiang | Application, Microcontrollers
M A Y. 2 0 1 4
TM
External Use
Agenda
•
Kinetis V Series MCU Overview • Deep Dive on KV1x • Tower Board and Demos
TM
External Use
1
Kinetis V Series MCU Overview
KV3x Family
Mid range PMSM, UPS power control
+ Multi Channel Timers + Floating Point Unit
2014
KV1x Family
BLDC, entry level PMSM
+ Motor Control Software
Feature Integration
飞思卡尔K60入门课件

K60芯片内置硬件浮点单元,支持浮点运算 和数字信号处理。
外设接口丰富
可扩展性
K60芯片集成了多种外设接口,如UART、 SPI、I2C等,方便开发者进行硬件连接和 通信。
K60芯片支持多种外设扩展,可以根据不同 的应用需求进行功能扩展。
02 K60开发环境搭建
开发环境概述
嵌入式系统开发环境
用于编写、编译、调试嵌入式系统程序的环境。
飞思卡尔官方网站和开发者社区提供了丰富的教程资源,从入门到进阶,涵盖 了K60微控制器的各种应用场景和开发技巧。
参与开源项目
开源项目
参与开源项目是学习K60的一种有效 方式,可以了解其他开发者是如何使 用K60进行开发的,并从中获取灵感 和学习经验。
贡献社区
通过参与开源项目,不仅可以学习到 其他人的开发经验,还可以将自己的 经验和技巧分享给社区,与其他开发 者共同进步。
电平;在读操作时,可以读取引脚的电平状态。
中断编程
中断概述
中断是一种常见的硬件机制,用于处理紧急事件或异常情况。在微控制器中,中断可以由 外部事件或内部事件触发,打断当前正在执行的程序,转而执行相应的中断处理程序。
中断配置
配置中断的触发方式、优先级和中断处理程序。在飞思卡尔K60微控制器中,可以通过编 程配置中断的属性。
连接调试接口
将调试器正确连接到K60开发板的调试接口上, 确保物理连接稳定。
ABCD
驱动安装
根据调试器型号,安装相应的驱动程序,以便于 与开发环境进行通信。
配置调试参数
在开发环境或调试软件中设置调试参数,如波特 率、数据位、停止位等,确保通信正常。
系统烧写
准备烧写文件
根据K60的硬件配置和开发 需求,准备相应的系统烧写
飞思卡尔单片机教学课件

THANKS
具体实现方法:首先需要将LED灯连接到单片机的某个I/O端口上,然后在程序 中配置该I/O端口的输出模式,通过循环语句控制LED灯的亮灭状态,从而实现 LED闪烁的效果。
按键输入程序
按键输入程序是单片机编程中常见的应用之一,通过编实现方法:首先需要将按键连接到单片机的某个I/O端口 上,然后在程序中配置该I/O端口的输入模式,通过检测该 I/O端口的电平变化来判断按键是否被按下,从而实现按键输 入的功能。
随着物联网和嵌入式系统 的发展,对单片机的功耗 要求越来越高,低功耗设 计成为未来的重要趋势。
多核处理器
为了提高处理能力和效率, 单片机将向多核处理器方 向发展,实现更复杂的功 能和更高的性能。
无线连接
无线连接技术的发展,使 得单片机能够更好地与外 部设备进行通信和控制, 扩展了应用范围。
飞思卡尔单片机的未来
IAR Embedded Workbench: 另一款流行的单片机开发软件,
提供丰富的工具链。
MPLAB X IDE:适用于XC8和 XC16系列单片机的开发环境,
由Microchip公司出品。
03 飞思卡尔单片机编程实 践
LED闪烁程序
LED闪烁程序是单片机编程的基础实践之一,通过编写程序控制LED灯的亮灭, 可以帮助学生理解单片机的I/O端口操作和程序执行流程。
更高效的生产工艺
更智能的算法支持
随着半导体技术的不断发展,飞思卡 尔单片机的生产工艺将更加高效,性 能和集成度更高。
随着人工智能和机器学习技术的发展, 飞思卡尔单片机将集成更智能的算法, 实现更高级的功能和应用。
更丰富的外设接口
为了满足各种应用需求,飞思卡尔单 片机将提供更丰富的外设接口,如 USB、HDMI等。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
3.1 实验一 I/O口输入输出实验4.实验原理如图3-1所示,将PTB6设置为输出端口后,若向PTB6写高电平时,LED灯不亮,若写低电平,则LED亮。
PTA2设置为输入端口后,在按键SW未按下时,读PTA2始终为高电平,只有在按键SW按下时,读PTA2时才得到低电平。
图3-1 LED灯与按键控制电路原理图5.实验内容⑴结合开发板电路图,用跳线夹连接对应LED引脚。
即LED1、LED2分别与PTB6、PTB7相连接。
将PTB 口定义为输出接口。
对端口写0即可点亮LED灯。
单步运行观察实验现象。
⑵结合开发板电路图,用跳线夹再将开发板上的按键SW1、SW2连到PTA2。
将PTA口定义为输入口,将PTB口定义为输出口。
按下SW1时点亮LED1、LED2。
按下SW2时熄灭LED1、LED2。
6.参考程序⑴直接点亮LED灯,其参考程序如下。
C语言程序:#include <hidef.h>#include "derivative.h" /* 头文件 */void main(void) {PTBDD=0xff; /*定义PTB口为输出口 */PTBD=0xff; /*输出高电平,LED灯灭*/PTBD=0x00; /*PTB口输出低电平,即PTB6、PTB7输出低电平 */for(;;) { __RESET_WATCHDOG(); /* 清看门狗 */} /* 死循环 */}汇编程序(加粗部分为所需添加的程序代码):;******************************************************************* ;* This stationery serves as the framework for a user application. * ;* For a more comprehensive program that demonstrates the more * ;* advanced functionality of this processor, please see the * ;* demonstration applications, located in the examples * ;* subdirectory of the "Freescale CodeWarrior for HC08" program * ;* directory. * ;*******************************************************************; Include derivative-specific definitionsINCLUDE 'derivative.inc';; export symbols;XDEF _StartupABSENTRY _Startup;; variable/data section;ORG RAMStart ; Insert your data definition here ExampleVar: DS.B 1;; code section;ORG ROMStart_Startup:LDHX #RAMEnd+1 ; initialize the stack pointerTXSCLI ; enable interruptsmainLoop:; Insert your code hereMOV #$FF,PTBDD; 端口方向寄存器初始化为输出MOV #$FF,PTBD; 输出高点平,LED灯灭MOV #$00,PTBD; 输出低电平,LED灯亮NOPfeed_watchdogBRA mainLoop;**************************************************************;* spurious - Spurious Interrupt Service Routine. *;* (unwanted interrupt) *;************************************************************** spurious: ; placed here so that security value NOP ; does not change all the time.RTI;**************************************************************;* Interrupt Vectors *;**************************************************************ORG $FFFADC.W spurious ;DC.W spurious ; SWIDC.W _Startup ; Reset⑵按键控制LED灯参考C语言程序如下:#include <hidef.h>#include "derivative.h" /* 头文件*/void main(void) {PTADD=0x00; /* 初始化PTA口,定义为输入口*/PTBDD_PTBDD6=1;PTBDD_PTBDD7=1; /* PTB6,PTB7定义为输出口*/PTBD_PTBD6=1;PTBD_PTBD7=1; /* PTB6,PTB7均写为1,开始时灯熄灭 */for(;;) {if(PTAD_PTAD2==0){PTBD_PTBD6=0;PTBD_PTBD7=0;}else if(PTAD_PTAD3==0){PTBD_PTBD6=1;PTBD_PTBD7=1;}else __RESET_WATCHDOG(); /* 清看门狗 */}}3.2 实验二键盘中断实验键盘中断(KBI)模块的块框图如图2-2所示,KBI模块允许多达8个管脚作为额外的中断源。
写键盘中断管脚使能寄存器(KBIPE)中KBIPEn位可独立的使能或屏蔽每个KBI管脚。
每个KBI管脚能够基于键盘中断状态和控制寄存器(KBISC)中的KBMOD位被配置成边沿敏感性或者边沿和电平敏感性。
边沿敏感性能够被软件编程为下降或上升沿;电平能被编程为低或高。
通过设置键盘中断选择寄存器(KBIES)中KBEDGn位可选择具体敏感性。
图3-2 键盘中断(KBI)块框图若要正确的使用KBI模块,需遵循以下步骤:⑴通过清除KBISC中KBIE,屏蔽键盘中断。
⑵通过设置KBIES中相应KBEDGn位使能KBI极性。
⑶如果使用内部上拉/下拉功能,配置PTAPE和PTBPE中相关位上拉使能位。
⑷通过设置KBIPE中相应KBIPEn位使能相应管脚为键盘中断管脚。
⑸写1到KBISC中KBACK,清除任何错误中断。
⑹设置KBISC中KBIE为1,使能中断。
5.实验内容MC9S08QG8开发板上的电路连接如图2-3所示,使能KBIP2、KBIP3,进而对LED1、LED2进行控制。
实现当按下SW1时,LED1亮、LED2灭,当按下SW2时,LED1灭、LED2亮。
在中断函数入口处设置断点,单步运行观察实验现象。
图3-3 键盘中断实验电路图6.参考程序#include <hidef.h> /* for EnableInterrupts macro */#include "derivative.h" /* include peripheral declarations */void main(void) {DisableInterrupts; /*关中断总允许 */PTADD_PTADD2=0;PTADD_PTADD3=0; /*PTA2、PTA3定义为输入口*/PTBDD_PTBDD6=1;PTBDD_PTBDD7=1; /*PTB6、PTB7定义为输出口*/PTBD_PTBD6=1;PTBD_PTBD7=1; /*LED灯均熄灭*/KBISC_KBIE=0;KBIES=0x00; /*下降沿/低电平触发*/KBIPE=0x0C; /*键盘中断开启即KBIP2、KBIP3键盘中断开启*/KBISC_KBACK=1; /*清除任何错误中断*/KBISC_KBIE=1; /*键盘中断允许*/EnableInterrupts; /* 开中断总允许*/for(;;) {__RESET_WATCHDOG();}}void interrupt 18 Keyboard( ) {KBISC_KBACK=1;KBISC_KBIE=0; /*禁止键盘中断*/if(PTAD_PTAD2==0){PTBD_PTBD6=0;PTBD_PTBD7=1;}else if(PTAD_PTAD3==0) {PTBD_PTBD6=1;PTBD_PTBD7=0;}else __RESET_WATCHDOG();KBISC_KBIE=1; /*开启键盘中断*/}中断服务程序函数还有一种写法,即如下:void interrupt Keyboard( ) {KBISC_KBACK=1;KBISC_KBIE=0;………………………就是将函数入口的键盘中断向量号“18”删除了,其它程序保持不变,如果直接进行调试将不能进入键盘中断服务程序,此时还需要在左侧项目栏中Project settings/linker files/preject.prm的末尾添加中断向量 VECTOR ADDRESS 0xFFDA Keyboard以作为中断入口设置。
(C语言编程时,其他中断也有类似的中断入口向量需要设置)。
0xFFDA是键盘中断向量入口地址,Keyboard是用户定义的键盘中断函数,它必须与main函数中用户定义的键盘中断函数名一致,否则会出现错误。
3.3 实验三定时器实验4.实验原理⑴8位定时器模块——MTIM。
该模块只有软件定时功能。
它由8位计数器、辅助寄存器、状态与控制寄存器、配置寄存器组成,被称为8-BIT MODULO TIMER MODULE(MTIM)。
当计数器中的计数值达到MTIM 模寄存器中预先给定的值时,定时器就会溢出,一次计时结束。
其原理图如图2-4所示。
图3-4 MTIM原理图⑵16位定时模块——TPM。
该模块主要包括一个可选择时钟源与分频器的16位计数器、一个16位的模寄存器、2个独立的定时器通道。
每个通道可以有外部管脚对应,使得这2个通道可以工作于输入捕捉、输出比较或PWM模式。
通过主状态与控制寄存器TPMSC中的控制位CPWMS的设置,可以使主计数器TPMCNT 成为加法计数器(CPWMS=0)或者是加/减计数器(CPWMS=1)。