UG运动仿真教程
UG运动仿真教程
四、运动副之间的关系
滑动副
转动副
Байду номын сангаас
滑动副
转动副
线缆副
螺钉副 齿轮齿条副
齿轮副 万向节
五、多种运动复合的处理技巧
1.有几种运动就有几个杆件,杆件的不足的要
增加辅助杆件(伪连杆)。 2.在错综复杂的相对运动关系中,运动的考察 目标一定要放在第一位。即:运动目标 /1/2/3/4…固定件。 3. 连杆、原点和方位要一个一个的选择,不 要嫌麻烦,这样可以避免出错。 4. 就机械手取物而言,货物的运动驱动为机 械手相应运动的部份运动;运动仿真过程中 灵活运用测量,确保机械手与货物的运动匹
UG运动仿真教程
青华工作室
一、UG动画的分类
1、利用装配序列实现动画:
坦克-飞机-变形金刚 虎钳 2、利用参数化实现动画: 振动的铜棒 水面涟漪 3、利用运动仿真模块实现动画: 莲花盛开 蜜蜂采蜜 变形金刚 万能夹具
二、UG运动仿真的步骤
1、模型的准备
运动仿真的模型对象:点、线、面、体,装配及非装配 的三维模型均可。
2、运动分析
分析各杆件之间的运动关系
3、定义刚性的连杆 4、添加运动副和运动驱动(难点) 5、解算及后处理
三、step函数
格式:STEP (x, x0, h0, x1, h1) 参数说明: x ―自变量,可以是time或time的任一函数 x0 ―自变量的STEP函数开始值,可以是常数
Step(time,2,1,3,step(time,4,0,5,-3)); Step(time,2,1,3,3)+step(time,4,0,5,-3) 注意为什么不写成
Step(time,2,1,3,3)+step(time,4,3,5,0) Step函数可以控制模型的运动时间段。
UG运动仿真教程

运动仿真9.1 运动仿真的工作界面本章主要介绍UG/CAE模块中运动仿真的功能。
运动仿真是UG/CAE(Computer Aided Engineering)模块中的主要部分,它能对任何二维或三维机构进行复杂的运动学分析、动力分析和设计仿真。
通过UG/Modeling的功能建立一个三维实体模型,利用UG/Motion的功能给三维实体模型的各个部件赋予一定的运动学特性,再在各个部件之间设立一定的连接关系既可建立一个运动仿真模型。
UG/Motion的功能可以对运动机构进行大量的装配分析工作、运动合理性分析工作,诸如干涉检查、轨迹包络等,得到大量运动机构的运动参数。
通过对这个运动仿真模型进行运动学或动力学运动分析就可以验证该运动机构设计的合理性,并且可以利用图形输出各个部件的位移、坐标、加速度、速度和力的变化情况,对运动机构进行优化。
运动仿真功能的实现步骤为:1.建立一个运动分析场景;2.进行运动模型的构建,包括设置每个零件的连杆特性,设置两个连杆间的运动副和添加机构载荷;3.进行运动参数的设置,提交运动仿真模型数据,同时进行运动仿真动画的输出和运动过程的控制;4.运动分析结果的数据输出和表格、变化曲线输出,人为的进行机构运动特性的分析。
9.1.1 打开运动仿真主界面在进行运动仿真之前,先要打开UG/Motion(运动仿真)的主界面。
在UG的主界面中选择菜单命令【Application】→【Motion】,如图9-1所示。
图9-1 打开UG/Motion操作界面选择该菜单命令后,系统将会自动打开UG/Motion的主界面,同时弹出运动仿真的工具栏。
9.1.2 运动仿真工作界面介绍点击Application/Motion后UG界面将作一定的变化,系统将会自动的打开UG/Motion 的主界面。
该界面分为三个部分:运动仿真工具栏部分、运动场景导航窗口和绘图区,如图9-2所示。
图9-2 UG/Motion 主界面运动仿真工具栏部分主要是UG/Motion各项功能的快捷按钮,运动场景导航窗口部分主要是显示当前操作下处于工作状态的各个运动场景的信息。
UG运动仿真教程

UG运动仿真教程一、UG运动仿真的基本概念UG软件中的运动仿真功能包括创建几何体、定义运动约束、添加动力学参数等。
通过对运动过程中的力学、动力学以及动力学参数的计算和模拟,可以预测物体的运动轨迹、速度、加速度等运动特性。
二、UG运动仿真的基本步骤1.创建几何模型:在UG软件中,首先需要创建物体的几何模型。
可以通过绘制、拉伸等工具创建物体的几何形状,也可以导入外部模型。
2.设置运动约束:在创建几何模型后,需要为物体设定运动约束。
运动约束包括位置约束、角度约束等,用于定义物体的运动范围和限制。
3.添加动力学参数:在建立几何模型和设置运动约束后,需要为物体添加动力学参数。
动力学参数包括质量、惯性矩阵、摩擦系数等,用于计算物体在运动中的力学特性。
4.运动仿真计算:完成上述步骤后,可以进行运动仿真计算。
UG软件会根据设定的运动约束和动力学参数,计算物体的运动轨迹、速度、加速度等参数,并在三维环境中实时显示物体的运动过程。
5.优化设计:通过观察和分析运动仿真的结果,可以对产品设计进行优化。
根据物体的运动特性,可以调整运动约束、改变动力学参数等,以达到更好的设计效果。
三、UG运动仿真的应用领域1.机械设计与工艺优化:UG运动仿真可以模拟产品在工作状态下的运动过程,帮助工程师分析零件的运动轨迹、工作效率等,优化设计方案和工艺流程。
2.机器人运动规划与控制:UG运动仿真可以模拟机器人的运动行为,预测机器人的轨迹、速度、加速度等,优化机器人的运动规划和控制算法。
3.汽车碰撞分析与安全设计:UG运动仿真可以模拟车辆在碰撞过程中的变形、速度、受力情况等,帮助汽车制造商减少碰撞事故的危害,提高车辆的安全性能。
4.产品装配与拆卸分析:UG运动仿真可以模拟产品的装配和拆卸过程,分析零部件的运动变形情况,优化产品的装配性能和使用寿命。
四、UG运动仿真的优势1.省时省力:UG运动仿真可以通过计算和模拟代替实际运动过程的试错,减少设计和制造阶段的试验和调整时间和成本。
UG__运动仿真教程
UG__运动仿真教程运动仿真是一种模拟真实运动过程的技术,可以帮助人们更好地理解和预测物体的运动规律。
它在物理学、机械工程、计算机动画等领域有着广泛的应用。
本文将介绍运动仿真的基本原理和常用的仿真方法。
一、运动仿真的基本原理运动仿真是通过数学模型来描述和模拟物体的运动过程。
它基于牛顿运动定律和其他物理定律,对物体的运动状态进行建模,并通过计算机算法来模拟物体在特定环境下的运动。
运动仿真的基本原理包括两个方面:力学模型和数值计算。
1.力学模型:力学模型是对物体受力和运动状态的描述。
它包括质点模型、刚体模型和弹性模型等。
质点模型将物体简化为一个质点,假设物体的质量集中在一个点上;刚体模型将物体看作刚性物体,不考虑形变;弹性模型考虑物体的形变和弹性恢复。
2.数值计算:数值计算是运动仿真的核心部分,它通过数值方法来求解运动模型。
最常用的数值方法是欧拉法和改进的欧拉法。
欧拉法通过离散化时间和空间来模拟运动过程,但它的精度较低;改进的欧拉法通过对欧拉法的改进,提高了仿真的精度。
二、运动仿真的常用方法运动仿真的方法很多,根据具体应用的需求和物体的特点选择适合的方法。
下面介绍几种常用的方法:1. 刚体动力学仿真:刚体动力学仿真适用于刚性物体的运动模拟。
它通过对刚体的受力和运动状态进行建模,并使用牛顿运动定律来求解物体的运动。
常用的方法有欧拉法、改进的欧拉法和Verlet积分法等。
2.弹性体仿真:弹性体仿真适用于弹性物体的模拟,如弹簧和橡胶。
它通过考虑物体的形变和弹性恢复来模拟物体的运动。
常用的方法有有限元法和质点弹簧模型等。
3.粒子系统仿真:粒子系统仿真适用于模拟大量粒子的运动,如雨滴、火焰和爆炸等。
它通过对粒子的位置、速度和力进行计算来模拟粒子的运动。
常用的方法有欧拉法和改进的欧拉法等。
4.刚柔耦合仿真:刚柔耦合仿真是将刚体和弹性体结合起来进行仿真。
它能够模拟包含刚性和弹性物体的复杂运动,如人物的运动和生物的行为等。
ug运动仿真(同605)

4.1 NX运动仿真概述本节将简要对 UG NX 的运动仿真界面和运动仿真工具进行基本的介绍,通过本节的学习,读者可以初步地认识UG NX 的运动仿真功能。
41.1 进入运动仿真模块由于运动仿真需要通过主模块来创建,因此需要先打开主模板,才能进一步进行运动仿真。
下面将介绍进入运动仿真模块的步骤。
打开主模版文件,也可以是包含了装配信息的文件。
(1)单击应用模块中的“运动”按钮。
即可进入运动仿真界面。
(2)在资源导航器中选择“运动导航器”,右键单击根目录按钮,在弹出的快捷菜单中选择“新建仿真”命令,将弹出“环境”对话框,设置好参数后,单击“确定按钮,即可进入新的运动仿真建立,如图4-1所示。
图4-1 “环境”对话框4.1.2 运动仿真界面运动仿真界面与建模界面样式大体上相似,但其工具与命令则有了较大的变化,如图4-2所示。
图4-2 运动仿真界面菜单栏:包含9个菜单命令,如文件、主页、结果、曲线、分析等。
工具栏:由基本环境工具栏、运动工具栏、动画控制工具栏组成,提供操作所需要的命令的快捷按钮。
运动导航器:通过树形结构显示各个数据,可以进行新建、克隆、删除运动仿真等命令。
4.1.3 运动仿真工具栏运动仿真工具栏包含了进行运动仿真时所需要的大部分命令,如连杆、运动副、齿轮副等,如图4-3所示。
有时运动工具栏也可以根据需要拆分成几个小的工具栏。
图4-3 “运动仿真”工具栏下面将对几种常用命令进行介绍。
连杆:通过连杆命令可以将部件定义为连杆,在运动仿真时部件将作为连杆进行分析模拟,如图4-4所示。
运动副:运动副可以将连杆连接起来,并通过定义不同的运动副的类型使连杆能够进行相应的动作,如图4-5所示。
图4-4 “连杆”对话框图4-5 “运动副”对话框传动副:传动副的作用是改变机构扭矩、转速等。
其中有齿轮副、齿轮齿条副和线缆副3种类型。
约束:通过约束命令可以指定两个对象之间的关系,其中点在曲线上、线在线上和点在曲面上3种类型,如图4-6所示。
UG运动仿真教程
UG运动仿真教程UG运动仿真是一种使用UG软件来模拟和分析产品的运动性能的方法。
它可以帮助工程师预测产品在不同工况下的运动轨迹、加速度和力学应力等信息,从而提高产品设计的准确性和效率。
本文将介绍UG运动仿真的基本原理和操作步骤,并通过一个实际案例进行演示。
UG运动仿真的基本原理是基于动力学分析和运动学原理。
动力学分析是根据牛顿力学原理,通过对物体的质量、加速度和受力进行计算,得出物体的运动状态。
而运动学原理则是研究物体在空间中的位置、速度和加速度之间的关系。
将这两个原理结合起来,就可以实现UG运动仿真。
在进行UG运动仿真之前,首先需要对产品进行建模。
UG提供了丰富的建模工具和功能,可以轻松地创建各种产品的三维模型。
建模完成后,就可以开始进行运动仿真了。
首先,打开UG软件并导入已经完成的产品模型。
然后,在菜单栏中选择"运动分析"选项,进入运动仿真界面。
在运动仿真界面中,可以看到产品模型和仿真工具栏。
接下来,需要定义产品的运动类型。
UG提供了多种运动类型的选择,如旋转、滑动、盘杆等。
根据实际情况选择相应的运动类型,并指定相应的约束条件和参数。
然后,需要添加约束和加载。
约束是指限制物体运动的条件,如固定、旋转、滑动等。
加载是指施加在物体上的力或力矩。
根据实际情况添加相应的约束和加载。
接下来是关键的步骤,即设置仿真参数和运行仿真。
在设置仿真参数时,需要指定仿真的时间范围、步长和求解器等。
时间范围是指仿真运行的时间长度,步长是指每个时间步的长度。
求解器是根据已知的约束条件和加载,计算物体的运动状态的算法。
根据实际情况设置仿真参数。
最后,点击运行仿真按钮,UG就会自动进行运动仿真。
在仿真过程中,UG会计算物体的运动轨迹、加速度和力学应力等信息,并将结果以图形或表格的形式展示出来。
通过UG运动仿真,工程师可以快速准确地预测产品在不同工况下的运动性能。
这对于产品设计的优化和改进非常有帮助。
例如,在汽车设计中,可以通过运动仿真来分析车身在不同驾驶条件下的动力学响应,从而优化悬挂系统和车身刚度,提高车辆的安全性和舒适性。
UG运动仿真函数设置教程

UG运动仿真函数设置教程UG运动仿真是一种通过计算机模拟物体的运动过程来预测和优化物体设计的方法。
它广泛应用于汽车、航空航天、船舶等工程领域,能够帮助工程师们节省时间和成本,提高设计的安全性和效率。
UG软件是一款功能强大、应用广泛的三维设计软件,其中的运动仿真功能十分强大。
本文将为您介绍UG运动仿真函数的设置方法。
首先,要使用UG的运动仿真功能,我们需要在UG环境下创建一个仿真模型。
在UG软件中打开需要进行运动仿真的模型文件后,依次点击"应用"→"运动仿真"→"运动仿真",即可进入运动仿真设置界面。
在运动仿真设置界面中,我们可以设置物体的材料属性、碰撞属性、接触属性等。
1.材料属性设置:在仿真模型中的物体都需要设置材料属性来模拟其物理特性。
在"材料"选项卡中,我们可以选择已有的材料库,也可以自行添加新的材料属性。
在UG软件中,常见的材料属性包括密度、弹性模量、泊松比等。
2.碰撞属性设置:在物体之间产生碰撞时,UG软件可以通过设置碰撞属性来模拟碰撞过程。
在"碰撞"选项卡中,我们可以设置碰撞检测的精度、碰撞的类型等。
在UG软件中,常见的碰撞类型包括刚体碰撞、柔体碰撞等。
3.接触属性设置:在物体之间产生接触时,UG软件可以通过设置接触属性来模拟接触过程。
在"接触"选项卡中,我们可以设置接触的类型、接触的范围等。
在UG软件中,常见的接触类型包括点接触、线接触、面接触等。
设置完物体的材料属性、碰撞属性、接触属性后,我们可以对仿真模型进行相应的运动仿真分析。
1.运动模拟:在"增加仿真"选项卡中,我们可以设定仿真的类型(如静力学仿真、动力学仿真)和仿真的终止条件。
在动力学仿真中,UG软件会模拟物体的加速度、速度、位移等运动特性。
2.结果分析:在仿真模拟完成后,UG软件会生成相应的运动仿真结果。
UG运动仿真教程

UG运动仿真教程UG是一款专业的CAD软件,可以进行机械设计、工业设计、生产制造等工作。
UG的强大功能之一就是其运动仿真功能,可以模拟产品在运动过程中的各种情况,例如运动轨迹、速度、加速度、负荷等。
本教程将介绍如何使用UG进行运动仿真。
一、建立零件和装配体在进行运动仿真之前,必须先建立相应的零件和装配体。
可以按照实际产品设计,也可以创建一些简单的零件和装配体来进行学习。
建立零件和装配体的方法在此不再赘述。
二、定义关节和运动学限制在进行运动仿真之前,必须定义零件之间的关节和运动学限制,以确保装配体能够正常运动。
关节有许多种类型,例如旋转关节、滑动关节、万向关节等。
可以通过“插入”-“关节”菜单来定义关节类型和位置。
在定义关节之后,需要设置运动学限制,以确保零件的运动范围符合实际情况。
例如,可以为旋转关节设置最大旋转角度,为滑动关节设置最大滑动距离等。
运动学限制可以在“关节”-“限制”菜单中进行设置。
三、创建运动仿真分析类型在定义关节和运动学限制之后,需要创建一个运动仿真分析类型,以便进行运动仿真分析。
可以在“运动仿真”-“新建运动仿真”菜单中创建仿真分析类型。
在创建仿真分析类型时,需要设置仿真类型、仿真步长、仿真时间等参数。
其中,仿真类型可以选择“刚性”或“弹性”;仿真步长决定了仿真分析的计算精度,数值越小计算精度越高,但计算时间也会更长;仿真时间设置了仿真分析的总时间。
四、定义初始位置和速度在定义运动仿真分析类型之后,需要设置零件的初始位置和速度。
可以通过“插入”-“实体状况”菜单来进行设置。
在设置初始位置时,可以通过移动零件来调整其位置。
在设置初始速度时,可以为零件设置初始速度矢量。
五、运行运动仿真分析在设置好运动仿真分析类型、关节和运动学限制、初始位置和速度之后,可以开始进行运动仿真分析。
可以在“运动仿真”-“分析”菜单中启动仿真分析。
在仿真分析的过程中,可以观看零件的运动轨迹、速度、加速度等情况。
UG运动仿真函数教程

UG运动仿真函数教程UG(Unigraphics)是一种用于实现三维建模、仿真和制造工程的软件平台,广泛应用于航空航天、汽车制造、机械工程等行业。
UG运动仿真函数是UG软件中用于模拟物体运动的函数库,它可以模拟物体的运动过程,帮助用户优化设计,减少试验成本。
1.UG软件基础知识:介绍UG软件的安装和基本操作,包括创建工程、导入模型、设置场景等。
这些知识是学习UG运动仿真函数的基础。
2.UG运动仿真函数的引入:介绍UG软件中引入运动仿真函数的方法,包括在模型中添加约束条件、定义物体的初始状态等。
3.UG运动仿真函数的使用:介绍UG软件中常用的运动仿真函数,包括求解运动方程、计算物体的运动轨迹等。
通过实例演示,详细介绍UG运动仿真函数的使用方法和注意事项。
4.UG运动仿真函数的应用:介绍UG软件中运动仿真函数的应用实例,包括机械结构的运动分析、汽车零部件的碰撞检测、飞机的空气动力学仿真等。
通过实例演示,帮助用户理解运动仿真函数在不同工程领域的应用。
5.UG运动仿真函数的优化:介绍UG软件中优化运动仿真函数的方法,包括调整模型参数、修改仿真算法等。
通过实例演示,帮助用户优化设计,提高仿真结果的准确性和效率。
-以实例为主,通过具体的案例演示,帮助用户理解和掌握UG运动仿真函数的使用方法。
-注重实践,引导用户通过实际操作来巩固和应用所学知识。
-注意解释原理,帮助用户理解运动仿真函数背后的工程原理和数学模型。
-注意安全性,提醒用户在进行物体运动仿真时要注意安全措施,避免因操作失误导致伤害。
通过UG运动仿真函数教程,读者可以了解UG软件中运动仿真函数的基本概念和使用方法,掌握运动仿真函数的应用技巧,并通过实例演示来提高解决实际问题的能力。
这将对读者在航空航天、汽车制造、机械工程等行业的工作中有很大的帮助。
UG__运动仿真教程文档全文免费阅读、在线看

羊重力作用下运动 动
6/29/2019
羊施加弹簧阻尼下的运
伪连杆例子:
6/29/2019
滑动副例子
6/29/2019
转到副例子
6/29/2019
6/29/2019
运动仿真功能的实现步骤为: 1. 建立一个运动分析场景; 2. 进行运动模型的构建 , 包括设置每个零件的连杆特性 3. 添加运动副和运动驱动(难点) ; 3. 进行运动参数的设置 , 提交运动仿真模型数据 , 同时进行运动 仿真动画的输出和运动过程的控制; 4. 运动分析结果的数据输出和表格、变化 曲线输 出 , 人为的进行 机构运动特性的分析。
6/29/2019
9.3.4 运动副的建立
UG/Motion 中各种运动 副(Joint) 的建立方 法都是类似的 , 下面以 铰链连接中的合页连接 (Rev o lute )为例介绍 运动副建立的整个过程
6/29/2019
羊需要说明的几点:
1. Snap Links 选种这个单选项后 , 用户所设置的运动副为两个连杆之间 的连接 , 则在该对话框中要求 设置运动副在各个连杆上的相关参数 ; 空置该单选项时 , 用户所设置的运动副为连 杆与假象的机架之间的连接 , 只需设置运动副在这个连杆上的参 数既可 。 2. Selection Steps 该选项给用户提供了建立一个运动副 的操作 步骤 。共包含四个步骤 , 其中可根据用户的 要求省去几项 , 通过完成各个步骤 , 可以引导用户完成运动副参数的设置 。 (①第 一个连杆 ; ②运动副在第一个连杆上的位置和方向 ; ③第二个连杆 ; ④运动副在第二 个连杆上的位置和方向) 3. 运动副的驱动力 运动副的驱动力是给运动副设置的初 始的外 在驱动 , 是该连杆运动的原动力 。在该选项 的下拉菜单中列出了UG/Motion给用 户提供 的五种 驱动力 的类型 (①没有; ②恒定的 ; ③谐波; ④一般方程; ⑤关节仿真)
UG运动仿真STEP函数式讲解(收藏)

UG运动仿真STEP函数式讲解(收藏)汇聚模具行业贤才展现模具企业品牌1.打开UG,导入stp文件,点击开始--运动仿真,进入运动仿真模块2.弹出运动导航器,右击kay,新建仿真3.弹出环境对话框,默认,点击确定4.创建摇臂为连杆01,如图,点击应用5.创建主轴箱为连杆02,如图,点击应用6.创建刀具钻头为连杆03,如图,点击应用7.创建工件及夹具为连杆04,如图,点击应用8.创建床体为固定连杆05,如图,点击确定9.创建连杆04为滑动副10.切换至驱动,平移方式为函数,函数数据类型为位移,点击函数管理器,新建函数11.选择插入运动函数中的STEP函数式,修改为如下函数式:STEP(x,0,0,3,STEP(x,3,200,9,STEP(x,9,-200,12,STEP(x,21.5,0,24,STEP(x,32,150,34,STEP(x,40,259.8,42,0)))) ))点击确定,确定,再确定。
12.创建连杆02为滑动副13.切换至驱动,平移方式为函数,函数数据类型为位移,点击函数管理器,新建函数,选择插入运动函数中的STEP函数式,修改为如下函数式:STEP(x,9,0,13,STEP(x,20.5,300.665,24,STEP(x,32,260.465,34,S TEP(X,39,150.665,42,0))))点击确定,确定,再确定。
14.创建连杆03为柱面副,并咬合连杆0215.切换至驱动,旋转方式为恒定,定义初速度为600;平移方式为函数,函数数据类型为位移,点击函数管理器,新建函数16.选择插入运动函数中的STEP函数式,修改为如下函数式:STEP(x,12,0,16,STEP(X,16,260,20,STEP(X,24,0,28,STEP(X,28,2 60,32,STEP(X,34,0,37,STEP(X,37,260,40,0))))))点击确定,确定,再确定。
17.创建连杆01为旋转副,并咬合连杆0218.切换至驱动,平移方式为函数,函数数据类型为位移,点击函数管理器,新建函数,选择插入运动函数中的STEP函数式,修改为如下函数式:STEP(x,12,0,16,STEP(X,16,260,20,STEP(X,24,0,28,STEP(X,28,2 60,32,STEP(X,34,0,37,STEP(X,37,260,40,0))))))点击确定,确定,再确定。
「UG运动仿真」完整教程:学习如何进行运动仿真分析,提升设计效率与产品品质

「UG运动仿真」完整教程:学习如何进行运动仿真分析,提升设计效率与产品品质UG Motion Simulation Complete Tutorial: Learning How to Conduct Motion Simulation Analysis to Improve Design Efficiency and Product QualityIntroduction:UG Motion Simulation is a powerful tool that can help engineers and designers to analyze and optimize the movement of mechanical systems, such as machines, vehicles, and robots. By simulating the motion of these systems, engineers can identify potential problems and make improvements before the physical prototype is built. This can greatly reduce the cost and time of product development, while improving the quality and reliability of the final product.In this tutorial, we will provide a step-by-step guide to using UG Motion Simulation. We will cover the following topics:1. Setting up the simulation environment2. Creating the motion model3. Defining the motion analysis parameters4. Running the simulation5. Analyzing the results6. Making improvements and optimizationsBy following this tutorial, you will learn how to use UG Motion Simulation to improve your design efficiency and product quality.1. Setting up the simulation environmentBefore we can begin the motion simulation, we need to set up the simulation environment. This involves creating a new simulation file and importing the necessary parts and assemblies.To create a new simulation file, go to the "File" menu and select "New". Then, select "Simulation" from the list of available templates. This will open a new simulation file.Next, we need to import the parts and assemblies that we want to simulate. To do this, go to the "File" menu and select "Import". Then, select the file format of the parts or assemblies that you want to import (such as STEP, IGES, or Parasolid). Once you have selected the file, follow the prompts to import it into the simulation file.2. Creating the motion modelOnce we have set up the simulation environment, we can begin creating the motion model. This involves defining the constraints and connections between the parts and assemblies, and specifying how they will move.To create the motion model, we need to use the "Assembly Constraints" toolbar. This toolbar contains a variety of tools for defining constraints, such as pins, hinges, and sliders.To define a constraint, select the appropriate tool from the toolbar and then select the parts or assemblies that you want to constrain. Follow the prompts to specify the type of constraint and its parameters.Once you have defined all of the necessary constraints, you can begin specifying the motion of the parts and assemblies. To do this, use the "Motion" toolbar. This toolbar contains tools for specifying the motion of parts and assemblies, such as rotating, translating, and oscillating.To specify the motion, select the appropriate tool from the toolbar and then select the parts or assemblies that you want to move. Follow the prompts to specify the type of motion and its parameters.3. Defining the motion analysis parametersOnce we have created the motion model, we need to define the motion analysis parameters. This involves specifying the duration of the simulation, the time step size, and the type of analysis that we want to perform.To define the motion analysis parameters, go to the "Motion Analysis" toolbar. This toolbar contains tools for specifying the analysis parameters, such as the simulation duration, thetime step size, and the type of analysis.To specify the analysis parameters, select the appropriate tool from the toolbar and follow the prompts to specify the parameters.4. Running the simulationOnce we have defined the motion analysis parameters, we can run the simulation. To do this, go to the "Motion Analysis" toolbar and select the "Run" tool. This will begin the simulation.During the simulation, you can monitor the progress of the simulation and view the motion of the parts and assemblies in real-time.5. Analyzing the resultsOnce the simulation is complete, we can analyze the results. This involves reviewing the motion data and identifying potential problems or areas for improvement.To analyze the results, go to the "Results"。
ug运动仿真
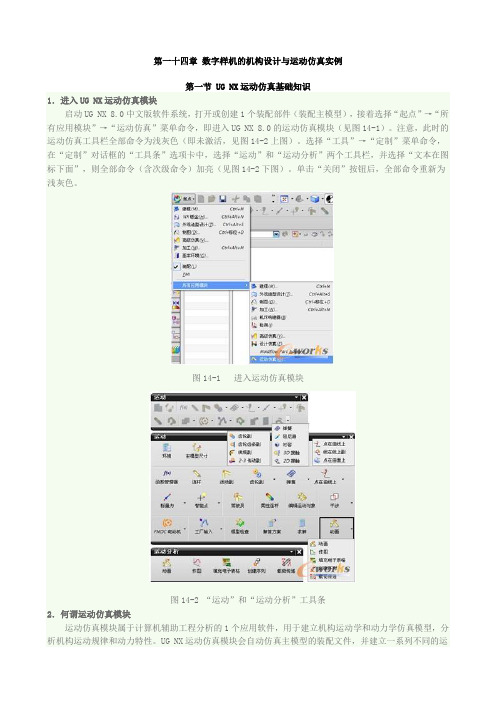
第一十四章数字样机的机构设计与运动仿真实例第一节 UG NX运动仿真基础知识1.进入UG NX运动仿真模块启动UG NX 8.0中文版软件系统,打开或创建1个装配部件(装配主模型),接着选择“起点”→“所有应用模块”→“运动仿真”菜单命令,即进入UG NX 8.0的运动仿真模块(见图14-1)。
注意,此时的运动仿真工具栏全部命令为浅灰色(即未激活,见图14-2上图)。
选择“工具”→“定制”菜单命令,在“定制”对话框的“工具条”选项卡中,选择“运动”和“运动分析”两个工具栏,并选择“文本在图标下面”,则全部命令(含次级命令)加亮(见图14-2下图)。
单击“关闭”按钮后,全部命令重新为浅灰色。
图14-1 进入运动仿真模块图14-2 “运动”和“运动分析”工具条2.何谓运动仿真模块运动仿真模块属于计算机辅助工程分析的1个应用软件,用于建立机构运动学和动力学仿真模型,分析机构运动规律和动力特性。
UG NX运动仿真模块会自动仿真主模型的装配文件,并建立一系列不同的运动仿真,每个运动仿真都可以独立修改,而不影响装配主模型,一旦完成机构优化设计方案,即可直接更新装配主模型,以反映机构优化设计的结果。
3.创建新的运动仿真在运动导航器中选择装配主模型(如“QBYGJG”)后,右击→单击“新建仿真”按钮→弹出“环境”对话框→默认“分析类型”为“动力学”→默认“仿真名”为“motion_1”→单击“确定”按钮→弹出“机构运动副向导”对话框→单击“确定”按钮(见图14-3和图14-4)。
此时,“运动”工具栏上的大部分命令加亮。
如果运动副不合格,则会出现如图14-5所示的提示框。
单击“是”按钮,则会出现如图14-6所示的画面。
图14-3 新建运动仿真1“motion_1”图14-4 成功创建运动仿真实例图14-5 “主模型到仿真的配对条件/约束转换”提示框图14-6 未成功创建运动仿真的实例4.运动仿真模块支持的运动分析类型(解算方案)UG NX可以执行的运动分析类型,即解算方案如下。
UG__运动仿真教程

UG__运动仿真教程运动仿真是通过计算机模拟运动过程的技术,可以用于模拟各种类型的运动,如机器人运动、人体运动、车辆运动等。
本篇教程将介绍如何使用UG软件进行运动仿真。
本教程将分为以下几个部分:1.系统要求2.安装UG软件3.导入模型4.设置材质5.确定运动范围6.创建关节7.设定动画关键帧8.运动仿真设置9.运行仿真10.保存模拟结果一、系统要求运行UG软件需要较高的计算机配置,建议使用具备较高CPU和内存的电脑。
安装UG软件也需要一定的存储空间。
此外,也需要了解基础的三维建模知识。
二、安装UG软件UG软件是一款商业软件,需要购买正版授权后使用。
购买后,按照安装向导进行安装即可。
三、导入模型打开UG软件,选择导入功能,选择要进行运动仿真的模型文件,导入模型。
可以选择常见的三维模型格式,如STL、STEP等。
四、设置材质为了使模型在运动仿真中更加直观,可以对模型的材质进行设置。
UG 软件提供了丰富的材质选项,可以根据需要进行设置。
选定模型后,点击设定材质按钮,在属性栏中进行材质设置。
五、确定运动范围在进行运动仿真前,需要确定模型的运动范围。
可以通过拖拽模型或者输入数值的方式进行设定。
在导航栏中找到模型变换选项,进行平移、旋转、缩放等操作。
六、创建关节运动仿真的核心是设置关节。
UG软件提供了丰富的关节类型,如旋转关节、滑动关节、平面关节等。
根据模型的实际情况选择合适的关节类型,并创建关节。
选择关节工具,在模型上点击两个相邻的部件以创建关节。
七、设定动画关键帧在建立了关节后,需要设定动画关键帧。
动画关键帧是指模型在不同时间点的状态。
选择动画关键帧工具,在时间轴上设定关键帧,对模型进行调整。
八、运动仿真设置在设定了动画关键帧后,需要进行运动仿真的设置。
选择动画工具,在动画设置中设定仿真的时间范围、速度、步长等参数。
选择适当的参数可以提高仿真的效果。
九、运行仿真完成了运动仿真的设置后,即可进行运行仿真。
UG运动分析教程运动仿真

UG运动分析教程运动仿真UG是一款功能强大的三维建模软件,广泛应用于各个领域,包括机械、汽车、航空等。
它不仅可以用来进行建模和设计,还可以进行动力学仿真,帮助工程师们分析和优化设计。
本教程将介绍UG中的运动分析功能,并通过一个实例来展示如何进行运动仿真。
首先,我们需要准备一个需要进行运动分析的模型。
在UG中,可以通过建模的方式创建一个模型,或者导入一个已有的模型。
在这里,我们将以一个简单的机械手臂为例。
创建一个机械手臂模型的步骤如下:1. 打开UG软件,并选择新建一个Part文件。
2. 在Part文件中,使用线、曲线和曲面等绘图功能来绘制机械手臂的各个零件。
3.通过修剪、镜像、旋转等操作,将这些零件组合成一个完整的机械手臂模型。
完成模型的创建后,我们可以开始进行运动分析了。
UG中的运动分析功能是通过基于约束的方法实现的。
这意味着我们需要定义各个零件之间的运动约束,以模拟真实的运动过程。
下面是进行运动分析的具体步骤:1.在UG的运动分析模块中,选择一个初始约束状态,将零件固定在所需的位置和方向上。
2.选择一个驱动装置,比如一个电机或者一个手动控制杆,用来驱动机械手臂的运动。
3.为机械手臂的各个关节添加旋转或者平移约束,限制它们的运动范围。
4.根据需求设置运动仿真的时间范围和步长。
5.运行仿真,观察机械手臂的运动过程,并分析各个关节的运动特性。
6.根据仿真结果,调整驱动装置和约束条件,优化机械手臂的设计。
通过以上步骤,我们可以利用UG的运动分析功能对机械手臂进行仿真,并得出各个关节的运动规律和优化建议。
运动分析不仅可以帮助我们验证设计的合理性,还可以提供重要的工程参数,比如力、速度、加速度等,为进一步的设计改进提供依据。
运动分析在机械设计中的应用非常广泛,不仅可以用于机械手臂,还可以应用于各种其他的机械设备。
UG作为一款功能强大的三维建模软件,可以帮助工程师们更加高效地进行运动分析,并得出准确的仿真结果。
UG运动仿真的建立过程

UG运动仿真的建立过程
运动仿真的建立过程
1.打开装配体,转换至运动仿真界面
2.右击装配选项,选择新建仿真命令
3.选择连杆(将相互无运动的零件视为一个连杆,设置中
选对于相对机架固定的构件为固定连杆),依次勾选装配体中所有构件,最终点击确定。
4.选择运动副选项,依次选取所有运动构件,进行定义。
(对于转动副,若其中一构件相对于机架固定,则此转
动副无需设置啮合连杆选项,反之,则需设置。
对于相对移动的构件,则仅需设置每一个构件的移动
方位即可。
对于原动件还需设置运动速度)
5.选择标记,选择追踪对象进行标记。
6.选择motion,右击选择新建追踪,选markers子选项
全部进行追踪。
7.建立解算方案,设置参数,确定解算方案,而后选择
求解此方案。
8.选择运动-〉动画选项,进行动画演示。
注:对于无需获取某部分运动轨迹的仿真,可以考虑5.6步骤。
UG运动仿真教程
UG运动仿真教程1.打开UG软件,选择“模拟”菜单下的“运动仿真”选项。
2.在“新模拟”对话框中,选择要仿真的物体和运动轨迹。
可以通过选择已经建模的零部件或创建新的零部件来定义要仿真的物体。
运动轨迹可以通过参数化建模或输入运动方程来定义。
4.选择仿真的参数和计算方法。
可以选择仿真的时间范围、时间步长、初始条件等。
计算方法可以是动态分析、静态分析或优化计算,根据需要选择。
5.单击“仿真”按钮,开始运行仿真。
可以观察物体的运动轨迹、速度、加速度等参数的变化情况。
同时还可以生成报告,分析仿真结果。
6.根据仿真结果进行设计优化。
根据仿真结果,可以对产品的材料、结构等进行优化,以满足设计要求。
1.运动分析:通过仿真分析物体在运动过程中的行为,包括位置、速度、加速度等参数的变化。
可以观察和分析物体的运动规律,为设计提供参考。
2.碰撞检测:可以检测物体在运动过程中是否会产生碰撞,帮助设计工程师避免设计上的问题。
可以通过设置碰撞检测参数和约束条件来进行检测。
3.摩擦分析:可以分析物体在运动过程中的摩擦情况,包括静摩擦和动摩擦。
通过调整摩擦系数和约束条件,可以模拟不同的摩擦情况。
4.优化计算:通过设置不同的设计参数和优化目标,可以对产品进行优化计算,以满足设计要求。
可以根据优化结果进行设计调整,提高产品性能。
5.可视化显示:可以通过3D可视化界面显示仿真结果,包括物体的运动轨迹、速度、加速度等参数。
可以通过调整显示参数和视角,观察物体在不同情况下的运动状态。
UG运动仿真是UG软件中常用的功能之一,可以帮助设计工程师进行产品设计和优化。
通过运动仿真,可以分析物体的运动规律、检测碰撞、分析摩擦等问题,并进行优化计算。
希望本文对您了解UG运动仿真的基本使用方法和常用功能有所帮助。
UG运动仿真教程

h0
(time t0 t1 t0
)2
g(h1
h0
)
h1(time t1)
Step(time,2,1,3,step(time,4,0,5,-3));
Step(time,2,1,3,3)+step(time,4,0,5,-3) 注意为什么不写成
Step(time,2,1,3,3)+step(time,4,3,5,0) Step函数可以控制模型的运动时间段。
UG运动仿真教程
青华工作室
一、UG动画的分类
1、利用装配序列实现动画: 坦克-飞机-变形金刚 虎钳
2、利用参数化实现动画: 振动的铜棒 水面涟漪
3、利用运动仿真模块实现动画: 莲花盛开 蜜蜂采蜜 变形金刚 万能夹具
二、UG运动仿真的步骤
1、模型的准备
运动仿真的模型对象:点、线、面、体,装配及非装配 的三维模型均可。
(Step(x,x0-0.001,0,x0,1)+Step(x,x1-0.001,0,x0,-1))*f(x)+ Step(x,x1,h1,x2,h1)+ (Step(x,x1-0.001,0,x1,1)+Step(x,x2-0.001,0,x2,-1))*g(x)
多项式函数与余弦函数
2、运动分析
分析各杆件之间的运动关系
3、定义刚性的连杆 4、添加运动副和运动驱动(难点) 5、解算及后处理
三、step函数
格式:STEP (x, x0, h0, x1, h1)
参数说明:
x ―自变量,可以是time或time的任一函数
x0 ―自变量的STEP函数开始值,可以是常数
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
点击 Application/Motion 后 UG 界面将作一定的变化,系统将会自动的打开 UG/Motion 的主界面。该界面分为三个部分:运动仿真工具栏部分、运动场景导航窗口和绘图区,如图 9-2 所示。
图 9-2 UG/Motion 主界面
运动仿真工具栏部分主要是 UG/Motion 各项功能的快捷按钮,运动场景导航窗口部分主 要是显示当前操作下处于工作状态的各个运动场景的信息。运动仿真工具栏区又分为四个模 块:连杆特性和运动副模块、载荷模块、运动分析模块以及运动模型管理模块,如图 9-3 所 示。
9.1.1 打开运动仿真主界面
在进行运动仿真之前,先要打开 UG/Motion(运动仿真)的主界面。在 UG 的主界面中 选择菜单命令【Application】→【Motion】,如图 9-1 所示。
图 9-1 打开 UG/Motion 操作界面
选择该菜单命令后,系统将会自动打开 UG/Motion 的主界面,同时弹出运动仿真的工具 栏。
图 9-9 运动场景的重命名
2)运动场景的删除 选择快捷菜单中的 Delete 菜单项既可实现运动场景的删除。 3)运动场景的复制 选择快捷菜单中的 Clone 菜单项既可实现运动场景的复制,复制后的运动场景与原来的 运动场景的各个参数都相同,如图 9-10 所示,通过分别选择【scenario_1】→【Clone,scenario_2】 →【Clone,scenario_3】→【Clone】菜单项新建了三个与 scenario_1 各项参数都相同的运动 场景,分别默认为 scenario_2、scenario_3、scenario_4。
图 9-14 【几何模型尺寸编辑】对话框
在该对话框几何模型特征列表中选中某一特征后,其各种特征参数表达式将在特征参数 列表中相应的显示,而在特征参数列表中选中该特征的某一参数时,其表达式和值将会相应 的在下部显示,此时用户可以对该表达式的值进Байду номын сангаас编辑。在特征参数数值文本输入框中输入 新的特征参数后,按回车键,同时该对话框中的 Apply 按钮被激活,单击 Apply 既可完成该 操作,从而改变模型的几何外形。
图 9-4 运动场景导航窗口
9.2 运动模型管理
打开 UG/Motion 的主界面之后,将会弹出运动模型管理工具栏,如图 9-5 所示。
图 9-5 运动模型管理工具栏
本节将对工具栏中的各个选项进行说明。
9.2.1 场景导航窗口
1.运动场景的建立 在进行运动仿真之前必需建立一个运动模型,而运动模型的数据都存贮在运动场景之中,
运动仿真
本章主要内容:
z 运动仿真的工作界面 z 运动模型管理 z 连杆特性和运动副 z 机构载荷 z 运动分析
9.1 运动仿真的工作界面
本章主要介绍 UG/CAE 模块中运动仿真的功能。运动仿真是 UG/CAE(Computer Aided Engineering)模块中的主要部分,它能对任何二维或三维机构进行复杂的运动学分析、动力 分析和设计仿真。通过 UG/Modeling 的功能建立一个三维实体模型,利用 UG/Motion 的功能 给三维实体模型的各个部件赋予一定的运动学特性,再在各个部件之间设立一定的连接关系 既可建立一个运动仿真模型。UG/Motion 的功能可以对运动机构进行大量的装配分析工作、 运动合理性分析工作,诸如干涉检查、轨迹包络等,得到大量运动机构的运动参数。通过对 这个运动仿真模型进行运动学或动力学运动分析就可以验证该运动机构设计的合理性,并且 可以利用图形输出各个部件的位移、坐标、加速度、速度和力的变化情况,对运动机构进行 优化。
图 9-3 四个运动仿真工具栏区
运动场景导航窗口显示了文件名称,运动场景的名称、类型、状态、环境参数的设置以 及运动模型参数的设置,如图 9-4 所示。运动场景是 UG 运动仿真的框架和入口,它是整个 运动模型的载体,储存了运动模型的所有信息。同一个三维实体模型通过设置不同的运动场 景可以建立不同的运动模型,从而实现不同的运动过程,得到不同的运动参数。
3) Inertia 该选项用于设置连杆的惯性力。选择该图标后,连杆创建对话框的界面将会发生变化, 变化后对话框的选项说明如图 9-17 所示。
图 9-17 【连杆创建】对话框
4) Initial Translation Velocity 该选项用于设置连杆的初始平移速度。选择该图标后,连杆创建对话框的界面将会发生 变化,变化后对话框的选项说明如图 9-18 所示。
9.3.2 连杆特性参数的编辑
当连杆特性参数设置有误时,就必需对各项参数进行修改,UG/Motion 该项功能的实现 是通过运动仿真工具栏区运动模型管理模块中的运动模型部件编辑的功能来实现的。点击运
动模型管理模块中的图标 (Edit Motion Object)将弹出一个【类选择】对话框,要求选 择将要进行编辑的部件,这与 UG/Modeling 中的类选择方法类似。将【类选择】对话框的选 择类型设为 Link,选择了某一连杆后将弹出连杆特性参数设置的对话框,如图 9-20 所示,对 各项参数的编辑与连杆建立时的参数设置操作完全相同。
图 9-22 【铰链连接】对话框
该对话框中的各种铰链连接类型说明如下: 1)合页连接 (Revolute) 铰链连接可以实现两个相连件绕同一轴作相对的转动,如图 9-23 所示。
弹出的运动模型参数设置图文框如图 9-13 所示。
图 9-13 弹出运动模型参数设置图文框
9.2.2 编辑模型几何尺寸
在建立了一个运动场景之后,用户仍然可以对运动场景中几何体的尺寸进行修改。 在 UG/Motion 运动模型管理工具栏中选择图标,系统将会自动打开一个【几何模型尺寸 编辑】对话框,如图 9-14 所示。
9.3.1 连杆特性的建立
点击运动仿真工具栏区的连杆特性和运动副模块中的图标 【连杆特性创建】对话框,如图 9-15 所示。
(Link),系统将会打开
图 9-15 连杆特性的建立
该对话框中的各个选项说明如下: 1.Selection Steps(选择步骤) 该选项给用户提供了建立一个连杆特性的操作步骤。共包含五个步骤,其中可根据用户 的要求省去几项。各个步骤说明如下:
2)User Define:由用户定义质量特性,选择该选项后,选择步骤中的图标 Mass 和 Inertia 将被自动激活。
3.Name(连杆名称) 该选项用于设置连杆的名称。 设置完了这些连杆特性参数后,该部件就具有了一定的运动学特性,可以与别的连杆以 一定的连接方式相连接了,构成运动机构。同时也可以对运动模型进行简化,将连杆的质量 特性设置为默认值 0,按 OK 键后该部件也将成为连杆。
图 9-7 建立一个新场景
运动场景建立后便可以对三维实体模型设置各种运动参数了,在该场景中设立的所有的 运动参数都将存储在该运动场景之中,由这些运动参数所构建的运动模型也将以该运动场景 为载体进行运动仿真。重复该操作可以在同一个 Master Model 下设立各种不同的运动场景, 包含不同的运动参数,实现不同的运动。
9.3.3 运动副的类型
图 9-20 连杆特性参数的编辑
在 UG/Motion 中给用户提供了 12 种运动副的类型,在连杆与运动副工具栏中列出了其
中的几种运动副,如图 9-21 所示。
图 9-21 运动副类型工具栏
下面分别来介绍各种运动副类型。 1.Joint(铰链连接) 选择该选项后将会弹出铰链连接对话框,在该对话框中列出了七种铰链连接的类型,如 图 9-22 所示。
图 9-10 运动场景的复制
3.运动场景参数的设置和信息的输出 1)运动场景环境参数的设置 选种某一运动场景,单击鼠标右键将弹出一快捷菜单,选择 Environment 菜单项将弹出 【运动仿真环境类型设置】对话框,如图 9-11 所示。
图 9-11 运动仿真环境类型设置
该对话框中的各个选项说明如下: z Kinematics: z Statics Dynamics: 通过不同的选择可以将运动仿真环境设置为运动学仿真或者是静态动力学仿真。 2)运动场景信息的输出
图 9-18 【连杆创建】对话框
5) Initial Rotation Velocity 该选项用于设置连杆的初始旋转速度。选择该图标后,连杆创建对话框的界面将会发生 变化,变化后对话框的选项说明如图 9-19 所示。
图 9-19 【连杆创建】对话框
2.Mass Properties(质量特性)
该选项用于设置连杆的质量特性创建的方式,包含三个选项: 1)Automatic:由系统自动生成连杆的质量特性。
所以运动场景的建立是整个运动仿真过程的入口。 利用 UG/Modeling 的功能建立了一个三维实体模型时必需将该模型设为一个运动可控模
型(Master Model),完成几何模型的创建之后,选择【Application】→【Motion】菜单项, 弹出运动场景导航窗口,该模型将自动的显示于运动场景导航窗口中,选种该模型按右键将 弹出一快捷菜单,如图 9-6 所示。
9.3 连杆特性和运动副
利用 UG/Modeling 的功能建立了一个三维实体模型后,并不能直接将各个部件按一定的 连接关系连接起来,必需给各个部件赋予一定的运动学特性,即让其成为一个可以与别的有 着相同的特性的部件之间相连接的连杆构件(Link)。
同时,为了组成一个能运动的机构,必需把两个相邻构件(包括机架、原动件、从动件) 以一定方式联接起来,这种联接必需是可动连接,而不能是无相对运动的固接(如焊接或铆 接),凡是使两个构件接触而又保持某些相对运动的可动连接即称为运动副。在 UG/Motion 中两个部件被赋予了连杆特性后,就可以用运动副(Joint)相联接,组成运动机构。
1) Link Geometry 该选项用于选择连杆特性的几何模型。激活该图标后,在图形窗口中选择将要赋予该连 杆特性的几何模型。