《机械优化设计》第6章习题解答-1
机械优化设计课后习题答案

机械优化设计课后习题答案(总9页)--本页仅作为文档封面,使用时请直接删除即可----内页可以根据需求调整合适字体及大小--第一章习题答案1-1 某厂每日(8h 制)产量不低于1800件。
计划聘请两种不同的检验员,一级检验员的标准为:速度为25件/h ,正确率为98%,计时工资为4元/h ;二级检验员标准为:速度为15件/h ,正确率为95%,计时工资3元/h 。
检验员每错检一件,工厂损失2元。
现有可供聘请检验人数为:一级8人和二级10人。
为使总检验费用最省,该厂应聘请一级、二级检验员各多少人 解:(1)确定设计变量;根据该优化问题给定的条件与要求,取设计变量为X = ⎥⎦⎤⎢⎣⎡=⎥⎦⎤⎢⎣⎡二级检验员一级检验员21x x ;(2)建立数学模型的目标函数;取检验费用为目标函数,即:f (X ) = 8*4*x 1+ 8*3*x 2 + 2(8*25* +8*15* ) =40x 1+ 36x 2(3)本问题的最优化设计数学模型:min f (X ) = 40x 1+ 36x 2 X ∈R 3·. g 1(X ) =1800-8*25x 1+8*15x 2≤0g 2(X ) =x 1 -8≤0 g 3(X ) =x 2-10≤0g 4(X ) = -x 1 ≤0 g 5(X ) = -x 2 ≤01-2 已知一拉伸弹簧受拉力F ,剪切弹性模量G ,材料重度r ,许用剪切应力[]τ,许用最大变形量[]λ。
欲选择一组设计变量T T n D dx x x ][][2321==X 使弹簧重量最轻,同时满足下列限制条件:弹簧圈数3n ≥,簧丝直径0.5d ≥,弹簧中径21050D ≤≤。
试建立该优化问题的数学模型。
注:弹簧的应力与变形计算公式如下322234881,1,(2n s s F D FD D k k c d c d Gd τλπ==+==旋绕比), 解: (1)确定设计变量;根据该优化问题给定的条件与要求,取设计变量为X = ⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡n D d x x x 2321; (2)建立数学模型的目标函数;取弹簧重量为目标函数,即:f (X ) =322124x x rx π(3)本问题的最优化设计数学模型:min f (X ) =322124x x rx π X ∈R 3·. g 1(X ) = ≤0g 2(X ) =10-x 2 ≤0 g 3(X ) =x 2-50 ≤0 g 4(X ) =3-x 3 ≤0 g 5(X ) =[]τπ-+312218)21(x Fx x x ≤0 g 6(X ) =[]λ-413328Gx x Fx ≤01-3 某厂生产一个容积为8000 cm 3的平底、无盖的圆柱形容器,要求设计此容器消耗原材料最少,试写出这一优化问题的数学模型。
机械优化设计课后习题答案
6 0 海赛矩阵H ( X ) 0 4
a 各阶主子式: a11 6 0,11 a 21 a12 a 22 6 0 0 0 4
H(X)是正定的,所以, f (X) 为凸函数。
得:极值点 X* [1/ 3 1/ 4]T ,极值f ( x* ) 229/ 24
X( k ) ( k )S( k ) 的几何意义。
2-2 已知两向量 P 1 [1 2
2 0]T , P 2 1]T ,求该两向量之间的夹角 。 2 [2 0
2-3 求四维空间内两点 (1,3,1,2) 和 (2,6,5,0) 之间的距离。 2-4 计 算 二 元 函 数 f (X) x13 x1 x22 5x1 6 在 X(0) [1 1]T 处 , 沿 方 向
x1 d 根据该优化问题给定的条件与要求,取设计变量为 X = x2 D2 ; n x3
(2)建立数学模型的目标函数; 取弹簧重量为目标函数,即:
1
f(X) =
2
4
rx1 x2 x3
2
(3)本问题的最优化设计数学模型: min s.t. f (X) =
2
4
rx1 x2 x3
2
X∈R
3·
g1(X) =0.5-x1 ≤0 g2(X) =10-x2 ≤0 g3(X) =x2-50 ≤0 g4(X) =3-x3 ≤0 g5(X) = (1
x1 8Fx2 ) ≤0 2 x2 x13
3
8Fx2 x3 g6(X) = ≤0 4 Gx1
求:
2、 3、 4 时的四条等值线,并在图上 (1) 以一定的比例尺画出当目标函数依次为 f ( X) 1、
机械优化设计习题参考答案--孙靖民-第四版第6章习题解答-1教学内容
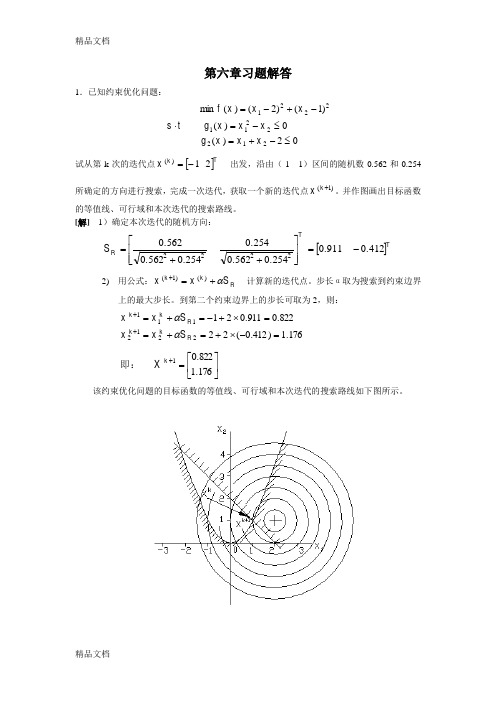
第六章习题解答1.已知约束优化问题:2)(0)()1()2()(min 21222112221≤-+=≤-=⋅-+-=x x x g x x x g ts x x x f试从第k 次的迭代点[]T k x21)(-= 出发,沿由(-1 1)区间的随机数0.562和-0.254所确定的方向进行搜索,完成一次迭代,获取一个新的迭代点)1(+k x 。
并作图画出目标函数的等值线、可行域和本次迭代的搜索路线。
[解] 1)确定本次迭代的随机方向:[]T TRS 0.4120.9110.2540.5620.2540.2540.5620.5622222-=⎥⎥⎦⎤⎢⎢⎣⎡++=2) 用公式:R k k S x xα+=+)()1( 计算新的迭代点。
步长α取为搜索到约束边界上的最大步长。
到第二个约束边界上的步长可取为2,则:176.1)412.0(22822.0911.0212212111=-⨯+=+==⨯+-=+=++R kk R k k S x x S x xαα⎥⎦⎤⎢⎣⎡=+176.1822.01k X即: 该约束优化问题的目标函数的等值线、可行域和本次迭代的搜索路线如下图所示。
2.已知约束优化问题:)(0)(025)(124)(m in 231222211221≤-=≤-=≤-+=⋅--=x x g x x g x x x g ts x x x f试以[][][]T T T x x x 33,14,12030201===为复合形的初始顶点,用复合形法进行两次迭代计算。
[解] 1)计算初始复合形顶点的目标函数值,并判断各顶点是否为可行点:[][][]935120101-=⇒==⇒=-=⇒=030302023314f x f x f x 经判断,各顶点均为可行点,其中,为最坏点。
为最好点,0203x x2)计算去掉最坏点 02x 后的复合形的中心点:⎥⎦⎤⎢⎣⎡+⎥⎦⎤⎢⎣⎡=⎪⎪⎭⎫ ⎝⎛⎥⎦⎤⎢⎣⎡+⎥⎦⎤⎢⎣⎡==∑≠=3325.221132103312i i i c x Lx3)计算反射点1R x (取反射系数3.1=α)20.693.30.551422.51.322.5)(1102001-=⎥⎦⎤⎢⎣⎡=⎪⎪⎭⎫ ⎝⎛⎥⎦⎤⎢⎣⎡-⎥⎦⎤⎢⎣⎡+⎥⎦⎤⎢⎣⎡=-+=R R c c R f x x x x x 值为可行点,其目标函数经判断α 4)去掉最坏点1R0301x x x x 和,,由02构成新的复合形,在新的复合形中 为最坏点为最好点,011R x x ,进行新的一轮迭代。
最新机械优化设计课后习题答案知识分享
第一章习题答案1-1某厂每日(8h制)产量不低于1800件。
计划聘请两种不同的检验员,一级检验员的标准为:速度为25件/ h,正确率为98%,计时工资为4元/ h;二级检验员标准为:速度为15件/力,正确率为95%,计时工资3 元/ ho检验员每错检一件,工厂损失2元。
现有可供聘请检验人数为:一级8人和二级10人。
为使总检验费用最省, 该厂应聘请一级、二级检验员各多少人?解:(1)确定设计变量;根据该优化问题给定的条件与要求,取设计变量为(2)建立数学模型的目标函数;取检验费用为目标函数,即:f(力二8*4**+ 8*3*X2 + 2 ( 8*25*0.02*+8*15*0. 05x2 )二40K+ 36x2(3) 本问题的最优化设计数学模型:min f (X)二40K+36X2X W Rs. t. g y (力=800-8*25^+8*15匕WOgi (X) =Xi-8W0§3 (A) ~%2_1 0^0闽(力二—Xi WOgs (A) —~x2 WO1-2已知一拉伸弹簧受拉力F,剪切弹性模量5 材料重度「,许用剪切应力国,许用最大变形量〔刃。
欲选择一组设计变量X = [X| x2x3]r =[d D2 n]r使弹簧重量最轻,同时满足下列限制条件:弹簧圈数心簧丝直径〃沖10<D2<50 o 试建立该优化问题的数学模型。
注:弹簧的应力与变形计算公式如下S罟,—1 +瘁,心牛(旋绕比),"器解:(1)确定设计变量;根据该优化问题给定的条件与要求,取设计变量为X二(2) 建立数学模型的目标函数;取弹簧重量为目标函数,即:心二分也(3) 本问题的最优化设计数学模型: min f (X -匚心山XwR4s. t. gi (力—0. 5-Xi WO §2(A)—10—%2 WO 戲(力—^2—50 WO切(力~3—%3 W0馬(无二(1+宀警十]W02X2兀勺说(力二氾*]W01-3某厂生产一个容积为8000 co?的平底、无盖的圆柱形容器,要求设计此容器消耗原材料最少,试写出这一优化问题的数学模型。
机械设计(第八版)课后答案高等教育出版社第六章习题

解: 1. 选择键联接的类型和尺寸
联轴器,选用单圆头普通平键 (C型), 20x12x110
齿轮处,选用圆头普通平键 (A型),25x14x80 —一定要分别说明选择的键型,当然选择其他型式键也可
2. 校核键联接的强度
机械优化设计第六章
第六章 约束优化方法
第一节 概
间接解法:
基本思路: 原目标函数 加权 新的目标函数
(无约束优化问题)
述
约束函数
(约束优化问题)
第六章 约束优化方法
第一节 概
间接解法:
迭代过程:
min f ( x) f ( x1 , x2 , s.t. g j ( x) g j ( x1 , x2 , hk ( x) hk ( x1 , x2 , , xn ) , xn ) 0 ( j 1, 2, , xn ) 0 ( k 1, 2, , m) , l)
第六章 约束优化方法
第二节 随机方向法
随机方向法基本思路:
迭代公式: xk 1 xk d k (k 0,1, )
探索 :x k 1 x k d k 满足:f ( x k 1 ) f ( x k ) g j ( x k 1 ) 0( j 1, 2, , m)
述
x, 1 , 2 f x 1G hk x g j x 2 H
j 1 k 1
mቤተ መጻሕፍቲ ባይዱ
l
第六章 约束优化方法
第一节 概
间接解法:
述
第六章 约束优化方法
第一节 概
间接解法的特点:
①计算效率和数值计算的稳定性有较大提高。 ②可以有效地处理具有等式约束的约束优化问题。
(4)当同一次迭代的初始点与末点的函数值满足式 | f ( x) f ( x 0 ) | 1和步长已达到 || x x 0 || 2 时,则结束迭代计算,并取x* x, f ( x* ) f ( x)。(式中1, 2为给定的收敛精度)
随机方向法的步骤:
机械优化设计课后习题答案
2、 3、 4 时的四条等值线,并在图上 (1) 以一定的比例尺画出当目标函数依次为 f ( X) 1、
画出可行区的范围。 (2) 找出图上的无约束最优解 X1 和对应的函数值 f ( X1 ) , 约束最优解 X 2 和 f ( X2 ) ; (3) 若加入一个等式约束条件:
h(X) x1 x2 0
1-3 某厂生产一个容积为 8000 cm 的平底、无盖的圆柱形容器,要求设计此容器消耗 原材料最少,试写出这一优化问题的数学模型。 解:根据该优化问题给定的条件与要求,取设计变量为 X = 表面积为目标函数,即: minf(X) =
3
x1 底面半径r , h x2 高
求此时的最优解 X3 , f ( X3 ) 。
解:下图为目标函数与约束函数(条件) 设计平面 X1OX2 。其中的同心圆是目标 函数依次为 f(X)=1、2、3、4 时的四条等 值线;阴影的所围的部分为可行域。 由于目标函数的等值线为一同心圆,所以 无约束最优解为该圆圆心即: X1*=[3,4]T 函数值 f(X1*)= 0 。
3·
g1(X) =1800-8*25x1+8*15x2≤0 g2(X) =x1 -8≤0 g3(X) =x2-10≤0 g4(X) = -x1 ≤0 g5(X) = -x2 ≤0
1-2
已知一拉伸弹簧受拉力 F ,剪切弹性模量 G ,材料重度 r ,许用剪切应力 [ ] ,
许用最大变形量 [ ] 。欲选择一组设计变量 X [ x1
6
a 各阶主子式: a11 2 0,11 a 21
a12 a 22
2 1 0 1 2
H(X)是正定的, 所以, f (X) 为凸函数。
机械优化设计复习题及答案

机械优化设计复习题一.单项选择题1.一个多元函数()F X 在X *附近偏导数连续,则该点位极小值点的充要条件为( )A .()*0F X ∇= B. ()*0F X ∇=,()*H X 为正定 C .()*0H X = D. ()*0F X ∇=,()*H X 为负定2.为克服复合形法容易产生退化的缺点,对于n 维问题来说,复合形的顶点数K 应( )A . 1K n ≤+ B. 2K n ≥ C. 12n K n +≤≤ D. 21n K n ≤≤- 3.目标函数F (x )=4x 21+5x 22,具有等式约束,其等式约束条件为h(x)=2x 1+3x 2-6=0,则目标函数的极小值为( )A .1B . 19.05C .0.25D .0.14.对于目标函数F(X)=ax+b 受约束于g(X)=c+x ≤0的最优化设计问题,用外点罚函数法求解时,其惩罚函数表达式Φ(X,M (k))为( )。
A. ax+b+M (k){min [0,c+x ]}2,M (k)为递增正数序列B. ax+b+M (k){min [0,c+x ]}2,M (k)为递减正数序列C. ax+b+M (k){max [c+x,0]}2,M (k)为递增正数序列hnD. ax+b+M (k){max [c+x,0]}2,M (k)为递减正数序列1.B2.C3.B4.B5.A6.B7.D8.B9.A 10C.11.B 12.C 13A 14.B 15.B 16 D 17.D 18.A 19.B.20.D 21.A 22.D 23.C 24.B 25.D 26.D 27.A 28.B 29.B 30.B5.黄金分割法中,每次缩短后的新区间长度与原区间长度的比值始终是一个常数,此常数是( )。
A.0.382 B.0.186 C.0.618 D.0.8166.F(X)在区间[x 1,x 3]上为单峰函数,x 2为区间中一点,x 4为利用二次插值法公式求得的近似极值点。
《机械优化设计》第6章习题解答-2资料

8. 有一汽门用弹簧,已知安装高度H1=50.8mm,安装(初始)载荷F1=272N ,最大工作载荷F2=680N ,工作行程h=10.16mm 弹簧丝用油淬火的50CrV A 钢丝,进行喷丸处理; 工作温度126°C ;要求弹簧中径为20mm ≤D2≤50mm ,弹簧总圈数4≤n1≤50,支 承圈数n2=1.75,旋绕比C ≥6;安全系数为1.2;设计一个具有重量最轻的结构方案。
[解] 1.设计变量:影响弹簧的重量的参数有弹簧钢丝直径:d ,弹簧中径D1和弹簧总圈数n1,可取这三个参数作为设计变量:即:⎥⎦⎤⎢⎣⎡=⎥⎦⎤⎢⎣⎡=H D x x x 212.目标函数:弹簧的重量为式中 ρ――钢丝材料的容重,目标函数的表达式为3221611262101925.0108.725.0)(x x x n D d x F --⨯=⨯⨯=π3.约束条件:1)弹簧的疲劳强度应满足min S S ≥式中 2.1m i n m i n =--S S ,可取最小安全系数,按题意S ――弹簧的疲劳安全系数,由下式计算:m s s s S ττττττττα⎪⎪⎭⎫⎝⎛+⎪⎪⎭⎫ ⎝⎛-=002式中 :劳极限,计算方法如下弹簧实际的脉动循环疲--0τ初选弹簧钢丝直径:4mm ≤d ≤8mm ,其抗拉强度MPa b 1480=σ,取弹簧的循环工作次数大于710,则材料的脉动循环疲劳极限为MPa b 44414803.03.0'0=⨯==στ设可靠度为90%,可靠性系数 868.0=r k ; 工作温度为126°C ,温度修正系数 862.0126273344273344=+=+=T k t再考虑到材料经喷丸处理,可提高疲劳强度10%,则弹簧实际的脉动循环疲劳极限为MPa k k t r 4.365444862.0868.01.1)1.01('00=⨯⨯⨯=+=ττ36/107.8mm kg -⨯=ρρπ12220.25n D d W =--s τ弹簧材料的剪切屈服极限,计算公式为MPa b s 74014805.05.0=⨯==στ--ατ弹簧的剪应力幅,计算公式为328dD F ka πτα=式中 k ――曲度系数,弹簧承受变应力时,计算公式为14.02)(6.1615.04414d D C C C k ≈+--=a F ――载荷幅,其值为N F F F a 2042/)272680(2/)(12=-=-=m τ――弹簧的平均剪应力,计算公式为328dD F k m sm πτ=式中s k ――应力修正系数,计算公式为dD C k s /615.01615.012+=+= m F ――平均载荷,其值为N F F F m 4762/)272680(2/)(12=+=+=由此,得到弹簧疲劳强度的约束条件为 计算剪应力幅ατ:86.2186.023214.023.8308)/(6.1x x d D F d D dD F ka a =⋅==ππτα328 计算平均应力幅m τ:21312246.74512.1212615.01x x x d D F Dd dD F k m m sm +=⎪⎪⎭⎫ ⎝⎛+==33288ππτ 计算弹簧的实际疲劳安全系数S :mms s s S τττττττττταα494.0506.14.365+=⎪⎪⎭⎫ ⎝⎛+⎪⎪⎭⎫ ⎝⎛-=0002从而得到弹簧的疲劳强度约束条件为012.1)(min 1≤-=-=SS S S x g 2)根据旋绕比的要求,得到约束条件016)(21min 2≤-=-=x x C C C x g3)根据对弹簧中径的要求,得到约束条件50222≤-=-=≤-=-=1)4(0120)3(max max 242min 3x D D D g x D D D g4)根据压缩弹簧的稳定性条件,要求:c F F ≤2式中 c F ――压缩弹簧稳定性的临界载荷,可按下式计算:K H D H F C ⎥⎥⎦⎤⎢⎢⎣⎡⎪⎪⎭⎫⎝⎛--=2022085.611813.0μ 式中 K ――要求弹簧具有的刚度,按下式计算:mm N h F F K /2.4016.1027268012=-=-=0H ――弹簧的自由高度,按下式计算: 当mm K F 16.9240.26802===λ 时, 304.20)5.0(2.1)5.0(310+-=+-=x n H λμ――长度折算系数,当弹簧一端固定,一端铰支时,取 7.0=μ;则:[][]⎪⎭⎪⎬⎫⎪⎩⎪⎨⎧⎥⎦⎤⎢⎣⎡+---+-=221398.1311304.20)5.0(268.320.3040.5)(13x x x x x F C于是得 01680)(25≤-=-=CC C F F F F x g5)为了保证弹簧在最大载荷作用下不发生并圈现象,要求弹簧在最大载荷2F 时的高度2H 应大于压并高度b H ,由于13112)5.0()5.0(64.4016.108.50x x d n H h H H b -=-==-=-=于是得到010123.00246.0)(131226≤--=-=x x x H H H x g b6)为了保证弹簧具有足够的刚度,要求弹簧的刚度αK 与设计要求的刚度K 的误差小于1/100,其误差值用下式计算:401.02.40)75.1(8100/)(33241---=--=x x Gx K K K αθ式中 G ――弹簧材料的剪切弹性模量,取G=80000Mpa 。
《机械优化设计》第6章习题解答-3

9.图6-39所示为一对称的两杆支架,在支架的顶点承受一个载荷为2F=300000N , 支架之间的水平距离2B=1520mm ,若已选定壁厚T=2.5mm 钢管,密度/1083-6mm Kg ⨯=.7ρ,屈服极限700=s σMpa ,要求在满足强度与稳定性条件下设计最轻的支架尺寸。
[解] 1.建立数学模型 设计变量:⎥⎦⎤⎢⎣⎡=⎥⎦⎤⎢⎣⎡=H D x x x 21目标函数:221422577600101.2252)(x x HBD T x f +⨯=+=πρ约束条件:1)圆管杆件中的压应力σ应小于或等于y ο,即y TDHHB F σπσ≤+=22于是得2122157760019098.59)(x x x x g +=2)圆管杆件中的压应力α应小于或等于压杆稳定的临界应力c σ,由欧拉公式得钢管的压杆温度应力c σ222152222225776006.25102.6)8()(x x H B T D E AL EIC ++⨯=++==ππσ2式中 A ――圆管的截面积;L ――圆管的长度。
于是得0)6006.25)/(577(102.657760019098.59)(2221521222≤++⨯-+=-=x x x x x x g c σσ3)设计变量的值不得小于或等于0于是得)(0)(2213≤-=≤-=x x g x x g2.从以上分析可知,该优化设计问题具有2个设计变量,4个约束条件,按优化方法程序的规定编写数学模型的程序如下:subroutine ffx(n,x,fx)dimension x(n) fx=1.225e-4*x(1)*sqrt(577600.0+x(2)*x(2))dimension x(n) fx=1.225e-4*x(1)*sqrt(577600.0+x(2)*x(2))fx=1.225e-4*x(1)*sqrt(577600.0+x(2)*x(2))endsubroutine ggx(n,kg,x,gx)dimension x(n),gx(kg)gx(1)=19098.59*sqrt(577600.0+x(2)*x(2))/(x(1)*x(2))-700.0gx(2)=19098.59*sqrt(577600.0+x(2)*x(2))/(x(1)*x(2))-1 2.6e5*(x(1)*x(1)+6.25)/(577600.0+x(2)*x(2))gx(3)=-x(1)gx(4)=-x(2)end3.利用惩罚函数法(SUMT法)计算,得到的最优解为:============== PRIMARY DATA ==============N= 2 KG= 4 KH= 0X : .7200000E+02 .7000000E+03FX: .9113241E+01GX: -.3084610E+03 -.8724784E+03 -.7200000E+02 -.7000000E+03PEN = .9132947E+01R = .1000000E+01 C = .4000000E+00 T0= .1000000E-01EPS1= .1000000E-05 EPS2= .1000000E-05=============== OPTIMUM SOLUTION ==============IRC= 18 ITE= 39 ILI= 39 NPE= 229 NFX= 0 NGR= 57R= .1717988E-06 PEN= .6157225E+01X : .4868305E+02 .6988214E+03FX: .6157187E+01GX: -.1204029E+03 -.1266042E-01 -.4868305E+02 -.6988207E+0310.图6-40所示为一箱形盖板,已知长度L=6000mm ,宽度b=600mm ,厚度mm t s 5= 承受最大单位载荷q=0.01Mpa ,设箱形盖板的材料为铝合金,其弹性模量MPa E 4107⨯=,泊松比3.0=μ,许用弯曲应力[]MPa 70=σ,许用剪应力[]MPa 45=τ,要求在满足强度、刚度和稳定性条件下,设计重量最轻的结构方案。
机械课后习题答案第6章习题及解答

第6章习题6.1机械为什么会产生速度波动?它有何危害?答:实际上,机械原动件的运动规律是由其各构件的质量、转动惯量和作用于其上的驱动力与阻抗力等因素而决定的,因而在一般情况下,原动件的速度和加速度是随时间而变化,机械在运动过程中会出现速度波动。
这种速度波动,会导致在运动副中产生附加的动压力,并一起机械的振动,从而降低机械的寿命、效率和工作质量。
6.2周期性速度波动应如何调节?它能否调节为恒稳定运转?为什么?答:在机械中安装一个具有很大转动惯量的回转构件——飞轮来调节周期性速度波动。
飞轮能够调速,是利用了它的储能作用。
由于飞轮转动惯量不可能为无穷大,而平均转速和最大盈亏功又都是有限值,所以安装飞轮后机械运转的速度仍有周期波动,只是波动的幅度减小而已。
6.3为什么在机械中安装飞轮就可以调节周期性速度波动?通常都将飞轮安装在高速轴上是什么原因?答:由于飞轮具有很大的转动惯量,因而要使其转速发生变化,就需要较大的能量,当机械出现盈功时,飞轮的角速度只作微小上升,即可将多余的能量吸收储存起来;当机械出现亏功时,机械运转速度减慢,飞轮又可将其储存的能量释放,以弥补能量的不足,而其角速度只作小幅度的下降。
当最大盈亏功与速度不均匀系数相同时,飞轮转动惯量与其轴的转速的平方值成反比,所以为减少飞轮的转动惯量,最好将飞轮安装在机械的高速轴上。
6.4非周期性速度波动应如何调节?为什么利用飞轮不能调节非周期性速度波动?答:机械运转的速度出现非周期性的波动,若长时间内驱动力矩大于阻抗力矩,机械将越转越快,甚至可能出现“飞车”现象,从而使机械遭到破坏;反之,若驱动力矩小于阻抗力矩,则机械会越转越慢,最后将停止不动。
飞轮只能延缓机械遭到破坏或停止不动,不能使驱动力矩和阻抗力矩恢复平衡关系。
对非周期性的速度波动进行调节,方法必须可以使机械重新回复稳定运转。
主要采取的方法是安装调速器。
6.5在什么条件下需要进行转动构件的静平衡?使转动构件达到静平衡的条件是什么?答:对于轴向尺寸很小的回转件(D/b>5,圆盘直径为D,其宽度为b),其质量的分布可以近似地认为在同一回转面内。
机械优化设计课后习题答案
2-8 解:
试判断函数 f (X) 2x12 x22 2x1x2 x1 1 的凸性。
f ( X ) f ( X ) 4 x1 2 x2 1 , 2 x2 2 x1 x1 x2
2 f (X ) 2 f (X ) 2 f (X ) 2 f (X ) 5, 2, 2, 2 2 x1x2 x2 x1 x12 x2 5 2 海赛矩阵H ( X ) 2 2
6
a 各阶主子式: a11 2 0,11 a 21
a12 a 22
2 1 0 1 2
H(X)是正定的, 所以, f (X) 为凸函数。
2-10 现已获得优化问题
min s.t.
f ( X) 4 x1 x2 2 12 g1 ( X) x12 x2 2 25 0 g 2 ( X) x12 x2 2 10 x1 10 x2 34 0 g3 ( X) ( x1 3) 2 ( x2 1) 2 0 g 4 ( X) x1 0 g5 ( X) x2 0
求:
2、 3、 4 时的四条等值线,并在图上 (1) 以一定的比例尺画出当目标函数依次为 f ( X) 1、
画出可行区的范围。 (2) 找出图上的无约束最优解 X1 和对应的函数值 f ( X1 ) , 约束最优解 X 2 和 f ( X2 ) ; (3) 若加入一个等式约束条件:
h(X) x1 x2 0
x2
x3 ]T [d
D2
n]T 使弹簧重量
最轻, 同时满足下列限制条件: 弹簧圈数 n 3 , 簧丝直径 d 0.5 , 弹簧中径 10 D2 50 。 试建立该优化问题的数学模型。 注:弹簧的应力与变形计算公式如下 3 8Fn D2 8FD2 D2 1 ks , k 1 , c ( 旋绕比), s d3 2c d Gd 4 解: (1)确定设计变量;
机械优化设计课后习题答案word版本

第一章习题答案1-1 某厂每日(8h 制)产量不低于1800件。
计划聘请两种不同的检验员,一级检验员的标准为:速度为25件/h,正确率为98%,计时工资为4元/ h;二级检验员标准为:速度为15件/h,正确率为95%,计时工资 3 元/h。
检验员每错检一件,工厂损失2元。
现有可供聘请检验人数为:一级8人和二级10人。
为使总检验费用最省,该厂应聘请一级、二级检验员各多少人?解:(1 )确定设计变量;X-j 一级检验员根据该优化问题给定的条件与要求,取设计变量为X = 1;x2二级检验员(2)建立数学模型的目标函数;取检验费用为目标函数,即:f(X) = 8*4* X1+ 8*3* X2 + 2 ( 8*25*0.02 X1 +8*15*0.05 X2 )=40x1+ 36x2(3)本问题的最优化设计数学模型:3 •min f (X) = 40X1+ 36X2 X€ Rs.t. g1(X) =1800-8*25 X1+8*15X2W 0g2( X) = x1 -8 < 0g3(X) = x2-10 w 0g4( X) = - X1 w 0 g5( X) = - x2w 01-2已知一拉伸弹簧受拉力F,剪切弹性模量G,材料重度r,许用剪切应力[],许用最大变形量[]。
欲选择一组设计变量X [X1 X2 X3]T [d D2 n]T使弹簧重量最轻,同时满足下列限制条件:弹簧圈数n 3, 簧丝直径d 0.5,弹簧中径10 D2 50。
试建立该优化问题的数学模型。
注:弹簧的应力与变形计算公式如下k s 8FD32 , k s 1 1, c D2 (旋绕比),s d3 s 2c d解:(1)确定设计变量;x-i d 根据该优化问题给定的条件与要求,取设计变量为X= x2D2;X3 n(2)建立数学模型的目标函数;取弹簧重量为目标函数,即:22f(X) = rx1 x2x343 本问题的最优化设计数学模型:8F n D;Gd423 •min f (X) = rx 1 x 2x 3 X € R4s.t.g i (X) =0.5- x i w 0 g 2( X) =10- x 2 w 0 g 3( X) = X 2-50 w 0 g 4( X) =3- X 3 w 0 g 5(X) =(1 丄)辱 w 02x 2 x 1w 0g 6(X)=38FX 2 x 3Gx 141-3某厂生产一个容积为 一优化问题的数学模型。
《机械优化设计》习题及答案1word版本
机械优化设计习题及参考答案1-1.简述优化设计问题数学模型的表达形式。
答:优化问题的数学模型是实际优化设计问题的数学抽象。
在明确设计变量、约束条件、目标函数之后,优化设计问题就可以表示成一般数学形式。
求设计变量向量[]12Tn x x x x =L 使 ()min f x → 且满足约束条件()0(1,2,)k h x k l ==L ()0(1,2,)j g x j m ≤=L2-1.何谓函数的梯度?梯度对优化设计有何意义?答:二元函数f(x 1,x 2)在x 0点处的方向导数的表达式可以改写成下面的形式:⎥⎦⎤⎢⎣⎡⎥⎦⎤⎢⎣⎡∂∂∂∂=∂∂+∂∂=∂∂2cos 1cos 212cos 21cos 1θθθθxo x f x f xo x f xo x f xo d fρ令xo Tx f x f x f x fx f ⎥⎦⎤⎢⎣⎡∂∂∂∂=∂∂∂∂=∇21]21[)0(, 则称它为函数f (x 1,x 2)在x 0点处的梯度。
(1)梯度方向是函数值变化最快方向,梯度模是函数变化率的最大值。
(2)梯度与切线方向d 垂直,从而推得梯度方向为等值面的法线方向。
梯度)0(x f ∇方向为函数变化率最大方向,也就是最速上升方向。
负梯度-)0(x f ∇方向为函数变化率最小方向,即最速下降方向。
2-2.求二元函数f (x 1,x 2)=2x 12+x 22-2x 1+x 2在T x ]0,0[0=处函数变化率最大的方向和数值。
解:由于函数变化率最大的方向就是梯度的方向,这里用单位向量p表示,函数变化率最大和数值时梯度的模)0(x f ∇。
求f (x1,x2)在x0点处的梯度方向和数值,计算如下:()⎥⎦⎤⎢⎣⎡-=⎥⎦⎤⎢⎣⎡+-=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡∂∂∂∂=∇120122214210x x x x f x f x f 2221)0(⎪⎭⎫ ⎝⎛∂∂+⎪⎭⎫ ⎝⎛∂∂=∇x f x f x f =5⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡-=⎥⎦⎤⎢⎣⎡-=∇∇=5152512)0()0(x f x f p ϖ2-3.试求目标函数()2221212143,x x x x x x f +-=在点X 0=[1,0]T 处的最速下降方向,并求沿着该方向移动一个单位长度后新点的目标函数值。
机械优化设计习题答案

机械优化设计习题答案机械优化设计习题答案在机械设计中,优化设计是一项重要的任务。
通过优化设计,可以提高机械产品的性能和效率,降低成本和能耗。
然而,在实际的设计过程中,我们常常会遇到各种各样的问题和难题。
下面,将针对一些常见的机械优化设计习题,提供一些解答和思路。
一、最小重量设计问题最小重量设计问题是机械设计中的一个经典问题。
在这类问题中,我们需要在满足一定的约束条件下,找到一个最轻的设计方案。
通常,这类问题可以通过数学建模和优化算法来求解。
首先,我们需要明确设计的约束条件和目标函数。
约束条件可以包括强制性要求和可选的要求,如尺寸限制、强度要求等。
目标函数可以是重量、成本、能耗等。
然后,我们可以利用数学建模的方法将问题转化为一个数学优化问题。
最常用的方法是使用拉格朗日乘子法或者KKT条件来求解。
二、最大刚度设计问题最大刚度设计问题是另一个常见的机械设计问题。
在这类问题中,我们需要在给定的约束条件下,找到一个刚度最大的设计方案。
刚度是指物体对外力的抵抗能力,通常是通过刚度矩阵来描述的。
在解决最大刚度设计问题时,我们需要首先建立物体的刚度矩阵。
然后,通过求解特征值问题,得到刚度矩阵的特征值和特征向量。
特征值表示物体的刚度,特征向量表示物体的振动模态。
接下来,我们可以通过调整设计参数来改变刚度矩阵,从而实现最大刚度的设计。
三、流体优化设计问题流体优化设计问题是机械设计中的一个重要领域。
在这类问题中,我们需要通过优化设计来改善流体的流动性能。
例如,我们可以通过改变流道的形状和尺寸,来减小流体的阻力和压降。
在解决流体优化设计问题时,我们可以利用计算流体力学(CFD)方法来模拟流体的流动。
首先,我们需要建立流体的数学模型,包括流动方程和边界条件。
然后,通过数值方法求解这个数学模型,得到流体的流动状态。
接下来,我们可以通过改变设计参数,如流道的形状和尺寸,来优化流体的流动性能。
总结起来,机械优化设计是机械设计中的一个重要任务。
《机械优化设计》习题与答案
《机械优化设计》习题与答案机械优化设计习题及参考答案1-1.简述优化设计问题数学模型的表达形式。
答:优化问题的数学模型是实际优化设计问题的数学抽象。
在明确设计变量、约束条件、⽬标函数之后,优化设计问题就可以表⽰成⼀般数学形式。
求设计变量向量[]12Tn x x x x =L 使 ()min f x →且满⾜约束条件()0(1,2,)k h x k l ==L ()0(1,2,)j g x j m ≤=L2-1.何谓函数的梯度?梯度对优化设计有何意义?答:⼆元函数f(x 1,x 2)在x 0点处的⽅向导数的表达式可以改写成下⾯的形式:??=??+??=??2cos 1cos 212cos 21cos 1θθθθxo x f x f xo x f xo x f xo d fρ令xo Tx f x f x f x fx f ??=????=?21]21[)0(,则称它为函数f (x 1,x 2)在x 0点处的梯度。
(1)梯度⽅向是函数值变化最快⽅向,梯度模是函数变化率的最⼤值。
(2)梯度与切线⽅向d 垂直,从⽽推得梯度⽅向为等值⾯的法线⽅向。
梯度)0(x f ?⽅向为函数变化率最⼤⽅向,也就是最速上升⽅向。
负梯度-)0(x f ?⽅向为函数变化率最⼩⽅向,即最速下降⽅向。
2-2.求⼆元函数f (x 1,x 2)=2x 12+x 22-2x 1+x 2在T x ]0,0[0=处函数变化率最⼤的⽅向和数值。
解:由于函数变化率最⼤的⽅向就是梯度的⽅向,这⾥⽤单位向量p表⽰,函数变化率最⼤和数值时梯度的模)0(x f ?。
求f (x1,x2)在x0点处的梯度⽅向和数值,计算如下:()-=??+-==?120122214210x x x x f x f x f 2221)0(??+ =x f x f x f =5-=??????-=??=5152512)0()0(x f x f p ?2-3.试求⽬标函数()2221212143,x x x x x x f +-=在点X 0=[1,0]T 处的最速下降⽅向,并求沿着该⽅向移动⼀个单位长度后新点的⽬标函数值。
机械优化设计题目答案

机械优化设计题目答案1-1.简述优化设计问题数学模型的表达形式。
答:优化问题的数学模型是实际优化设计问题的数学抽象。
在明确设计变量、约束条件、目标函数之后,优化设计问题就可以表示成一般数学形式。
求设计变量向量[]12Tn xx x x =L 使()min f x →且满足约束条件()0(1,2,)k h x k l ==L ()0(1,2,)j g x j m ≤=L利用可行域概念,可将数学模型的表达进一步简练。
设同时满足()0(1,2,)j g x j m ≤=L 和()0(1,2,)k h x k l ==L 的设计点集合为R ,即R 为优化问题的可行域,则优化问题的数学模型可简练地写成求x 使 min ()x Rf x ∈ 符号“∈”表示“从属于”。
在实际优化问题中,对目标函数一般有两种要求形式:目标函数极小化()min f x →或目标函数极大化()max f x →。
由于求()f x 的极大化与求()f x -的极小化等价,所以今后优化问题的数学表达一律采用目标函数极小化形式。
1-2.简述优化设计问题的基本解法。
(不要抄书,要归纳)答:求解优化问题可以用解析解法,也可以用数值的近似解法。
解析解法就是把所研究的对象用数学方程(数学模型)描述出来,然后再用数学解析方法(如微分、变分方法等)求出有化解。
但是,在很多情况下,优化设计的数学描述比较复杂,因而不便于甚至不可能用解析方法求解;另外,有时对象本身的机理无法用数学方程描述,而只能通过大量试验数据用插值或拟合方法构造一个近似函数式,再来求其优化解,并通过试验来验证;或直接以数学原理为指导,从任取一点出发通过少量试验(探索性的计算),并根据试验计算结果的比较,逐步改进而求得优化解。
这种方法是属于近似的、迭代性质的数值解法。
数值解法不仅可用于求复杂函数的优化解,也可以用于处理没有数学解析表达式的优化问题。
因此,它是实际问题中常用的方法,很受重视。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第六章习题解答1.已知约束优化问题:2)(0)()1()2()(min ≤-+=≤-=⋅-+-=xx x g xxx g ts xx x f试从第k 次的迭代点[]x21-= 出发,沿由(-1 1)区间的随机数0.562和-0.254所确定的方向进行搜索,完成一次迭代,获取一个新的迭代点+x 。
并作图画出目标函数的等值线、可行域和本次迭代的搜索路线。
[解] 1)确定本次迭代的随机方向:[]S0.4120.9110.2540.5620.2540.2540.5620.5622222-=⎥⎥⎦⎤⎢⎢⎣⎡++=2)用公式:Sx x α+=+计算新的迭代点。
步长α取为搜索到约束边界上的最大步长。
到第二个约束边界上的步长可取为2,则:176.1)412.0(22822.0911.021=-⨯+=+==⨯+-=+=++Sx xS x x αα⎥⎦⎤⎢⎣⎡=+176.1822.0X即:该约束优化问题的目标函数的等值线、可行域和本次迭代的搜索路线如下图所示。
2.已知约束优化问题:)(0)(025)(124)(min ≤-=≤-=≤-+=⋅--=xx g x x g x x x g ts xx x f试以[][][]x x x33,14,12===为复合形的初始顶点,用复合形法进行两次迭代计算。
[解] 1)计算初始复合形顶点的目标函数值,并判断各顶点是否为可行点:[][][]93512-=⇒==⇒=-=⇒=03032023314f xf x fx经判断,各顶点均为可行点,其中,为最坏点。
为最好点,x x 2)计算去掉最坏点 02x后的复合形的中心点:⎥⎦⎤⎢⎣⎡+⎥⎦⎤⎢⎣⎡=⎪⎪⎭⎫ ⎝⎛⎥⎦⎤⎢⎣⎡+⎥⎦⎤⎢⎣⎡==∑≠=3325.22113312x Lx 3)计算反射点x(取反射系数3.1=α)20.693.30.551422.51.322.5)(11021-=⎥⎦⎤⎢⎣⎡=⎪⎪⎭⎫ ⎝⎛⎥⎦⎤⎢⎣⎡-⎥⎦⎤⎢⎣⎡+⎥⎦⎤⎢⎣⎡=-+=fx xxx x值为可行点,其目标函数经判断α4)去掉最坏点1R 0301x x x x 和,,由构成新的复合形,在新的复合形中为最坏点为最好点,011R x x ,进行新的一轮迭代。
5)计算新的复合形中,去掉最坏点后的中心点得:⎥⎦⎤⎢⎣⎡=⎪⎪⎭⎫ ⎝⎛⎥⎦⎤⎢⎣⎡+⎥⎦⎤⎢⎣⎡= 3.151.7753.30.553321x6)计算新一轮迭代的反射点得:,完成第二次迭代。
值为可行点,其目标函数经判断413.14 5.9451.4825123.151.7751.33.151.775)(121112-=⎥⎦⎤⎢⎣⎡=⎪⎪⎭⎫ ⎝⎛⎥⎦⎤⎢⎣⎡-⎥⎦⎤⎢⎣⎡+⎥⎦⎤⎢⎣⎡=-+=fx x xxxα3.设已知在二维空间中的点[]xxx =,并已知该点的适时约束的梯度[]g 11--=∇,目标函数的梯度[]f 15.0-=∇,试用简化方法确定一个适用的可行方向。
[解] 按公式6-32 计算适用的可行方向:)(xf P xf P d ∇∇-=/)(x 点的目标函数梯度为:[]xf 15.0)(-=∇x点处起作用约束的梯度G 为一个J n ⋅ 阶的矩阵,题中:n=2,J=1:[]xg G 11)(--=∇=梯度投影矩阵P 为:[][][]⎥⎦⎤⎢⎣⎡--=-⎪⎪⎭⎫⎝⎛⎥⎦⎤⎢⎣⎡----⎥⎦⎤⎢⎣⎡---⎥⎦⎤⎢⎣⎡=-=--5.05.05.05.00111111111001GGGG I P则:适用可行方向为:⎥⎦⎤⎢⎣⎡-=⎥⎦⎤⎢⎣⎡-⎥⎦⎤⎢⎣⎡--⎥⎦⎤⎢⎣⎡-⎥⎦⎤⎢⎣⎡---=707.0707.010.50.50.50.50.510.50.50.50.50.5d4.已知约束优化问题:00)(34)(min ≤-=≤-=≤-=⋅-+-=xgx g x g ts xxxx xx f试求在[]x1/21/4=点的梯度投影方向。
[解] 按公式6-32 计算适用的可行方向:)(x f P x f P d ∇∇-=/)(x 点的目标函数梯度为:[]xf 125.0125.0--=∇)(x点处起作用约束的梯度G 为一个J n ⋅ 阶的矩阵,题中:n=3,J=1:[]xg G 001)(1-=∇=梯度投影矩阵P 为:[][][]⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=-⎪⎪⎪⎭⎫⎝⎛⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡--⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡--⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=-=--10001000000100100100110001000111GGGG I P则:适用可行方向为:⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡--⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡--⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡-=97.0243.00125.0100010.250.1251000100000.12500100d312)(2112221≤-=⋅+-+=xg ts x xx x f m in(提示:可构造惩罚函数 []∑=-=)(ln )(),(x g r x f r x φ,然后用解析法求解。
)[解] 构造内点惩罚函数:[]∑=--+-+=-=21)()(),(x r x x xx g r x f r x )3ln(12ln φ令惩罚函数对x 的极值等于零:0)3/()(222=⎥⎦⎤⎢⎣⎡----=x r x x dx d φ得:48366121r xx +±== 舍去负根后,得483662r x++=当 []x xr 31302=→→该问题的最优解为,时,。
0)(min ≤-=≤-=⋅+=xgx x g ts xx x f[解] 将上述问题按规定写成如下的数学模型: subroutine ffx(n,x,fx) dimension x(n) fx=x(1)+x(2) endsubroutine ggx(n,kg,x,gx) dimension x(n),gx(kg) gx(1)=x(1)*x(1)-x(2) gx(2)=-x(1)endsubroutine hhx(n,kh,x,hx) domension x(n),hx(kh) hx(1)=0.0 end然后,利用惩罚函数法计算,即可得到如下的最优解:============== PRIMARY DATA ============== N= 2 KG= 2 KH= 0 X : .1000000E+01 .2000000E+01 FX: .3000000E+01GX: -.1000000E+01 -.1000000E+01 X : .1000000E+01 .2000000E+01 FX: .3000000E+01GX: -.1000000E+01 -.1000000E+01 PEN = .5000000E+01R = .1000000E+01 C = .2000000E+00 T0= .1000000E-01 EPS1= .1000000E-05 EPS2= .1000000E-05=============== OPTIMUM SOLUTION ============== IRC= 21 ITE= 54 ILI= 117 NPE= 3759 NFX= 0 NGR= 0 R= .1048577E-13 PEN= .4229850E-06 X : .9493056E-07 .7203758E-07 FX: .1669681E-06GX: -.7203757E-07 -.9493056E-077.用混合惩罚函数法求下列问题的最优解:1)(0)()(2121112≤-+=≤-=⋅-=xx x h x x g ts x xx f ln m in[解] 将上述问题按规定写成如下的数学模型: subroutine ffx(n,x,fx) dimension x(n) fx=x(2)-x(1) endsubroutine ggx(n,kg,x,gx) dimension x(n),gx(kg) gx(1)=-log(x(1))] gx(2)=-x(1) gx(3)=-x(2) endsubroutine hhx(n,kh,x,hx) domension x(n),hx(kh) hx(1)=x(1)+x(2)-1end然后,利用惩罚函数法计算,即可得到如下的最优解:============== PRIMARY DATA ============== N= 2 KG= 3 KH= 1 X : .2000000E+01 .1000000E+01FX: -.1000000E+01GX: -.6931472E+00 -.2000000E+01 -.1000000E+01 X : .2000000E+01 .1000000E+01 FX: -.1000000E+01GX: -.6931472E+00 -.2000000E+01 -.1000000E+01 HX: .2000000E+01 PEN = .5942695E+01R = .1000000E+01 C = .4000000E+00 T0= .1000000E-01 EPS1= .1000000E-05 EPS2= .1000000E-05=============== OPTIMUM SOLUTION ============== IRC= 29 ITE= 143 ILI= 143 NPE= 1190 NFX= 0 NGR= 172 R= .7205765E-11 PEN= -.9999720E+00 X : .1000006E+01 .3777877E-05FX: -.1000012E+01GX: -.5960447E-05 -.1000006E+01 .6222123E-05 HX: -.2616589E-06。