光电导航测距系统
红外测距系统设计(光电系统设计)

word本科生课程论文论文题目红外光电测距系统设计课程名称光电系统设计学生某某谷幸东、郭晓龙、何志毅、胡健辉学号201211911309、10、11、12所在学院理学院所在班级电科1123班指导教师汤照目录第一章绪论11.1 红外线概述11.2 红外传感器的分类11.3 红外传感器的应用21.4 AT89C52单片机概述31.5 MCP3001简介6第二章红外测距的工作原理与基本结构82.1 红外测距传感器简介82.2 红外线测距的工作原理82.4红外测距传感器接线102.5 红外测距系统的基本结构10第三章红外测距的硬件设计113.1 红外测距的实现构想113.2 系统硬件结构电路图123.3 各硬件电路设计123.3.1 复位电路123.3.2 时钟电路133.3.3 A/D转换电路143.3.4 LCD显示电路14第四章红外测距的软件设计154.1 系统软件结构框图154.2 软件程序设计164.3 源代码16第五章仿真测试215.1系统的软件的调试仿真21第六章 PCB图及元器件清单226.1 PCB图236.2 元器件清单23第七章课程设计任务分工及个人心得体会247.1任务分工247.2 设计心得体会24第一章绪论1.1 红外线概述红外辐射俗称红外线,又称红外光,它是一种人眼看不见的光线。
但实际上它和其他任何光线一样,也是一种客观存在的物质。
任何物体,只要它的湿度高于绝对零度,就有红外线向周围空间辐射。
它的波长介于可见光和微波之间。
红外辐射的物理本质是热辐射。
物体的温度越高,辐射出来的红外线越多,红外辐射的能量就越强。
研究发现,太阳光谱各种单色光的热效应从紫色光到红色光是逐渐增大的,而且最大的热效应出现在红外辐射的频率X围内,因此人们又将红外辐射称为热辐射或热射线。
目前红外发射器件(红外发光二极管)发出的是峰值波长0.88uM~0.94uM之间的近红外光,红外接收器件(光敏二极管、光敏三极管)的受光峰值波长为0.88uM~0.94uM之间,恰好与红外发光二极管的光峰值波长相匹配。
光电测距导线测量技术实施方案
光电测距导线测量技术实施方案引言:光电测距导线测量技术是一种通过使用光电传感器和导线进行测量的非接触式测量技术。
它可以广泛应用于测量距离、测量位移、测量速度等领域。
本实施方案将详细介绍光电测距导线测量技术的原理、具体实施步骤以及相关注意事项,以便更好地应用于实际工程项目。
一、技术原理:光电测距导线测量技术基于光电传感器的原理实现。
光电传感器是一种能够将接收到的光信号转化为电信号的传感器。
当光线通过导线时,由于导线的折射和反射,光线的强弱会发生变化。
利用光电传感器可以感受到这种变化并将其转化为电信号。
通过测量电信号的强度,我们可以得到导线的距离、位移或速度等信息。
二、实施步骤:1.准备工作:(1)选购适用的光电传感器和导线;(2)根据具体需求,设计并搭建测试平台。
2.连接光电传感器和导线:(1)将光电传感器与测试平台连接,确保连接稳定可靠;(2)将导线与光电传感器相连,保持导线与光线的垂直交叉。
3.完成校准:(1)使用标准测量仪器测量导线准确的距离、位移或速度等数值;(2)根据标准值和实际测量值的差异,对光电传感器进行校准,使其输出的电信号与实际数值相符。
4.开始测量:(1)通过控制测试平台,让导线沿着所需测量的距离、位移或速度运动;(2)光电传感器将感受到光线的变化,并将其转化为电信号;(3)通过获取电信号的强度,计算出具体的距离、位移或速度等数值。
5.结果分析和数据处理:(1)获取测量结果,记录测量数据;(2)根据实际需求,进行结果分析和数据处理,如数据拟合、平均值计算等。
三、注意事项:1.选择合适的光电传感器和导线,确保其性能和质量符合测量要求;2.在搭建测试平台时,保持光电传感器与导线的连接稳定可靠,确保测量的准确性;3.在进行测量前,必须对光电传感器进行校准,确保其输出的电信号与实际数值相符;4.测量过程中,尽量消除外界干扰,保持测量环境的稳定性;5.对测量结果进行数据分析和处理时,要注意排除异常数据和误差。
相位式光电测距的基本原理

相位式光电测距的基本原理
嘿,朋友们!今天咱来聊聊相位式光电测距的基本原理,这可真是个神奇又有趣的玩意儿呢!
你看啊,相位式光电测距就好像我们和目标之间的一场特殊“对话”。
想象一下,我们发出一束光,就像我们向目标喊了一句话。
这束光跑啊跑,跑到目标那里,然后又反射回来。
我们呢,就等着接收这个反射回来的光。
这里面关键的就是这个“相位”啦!就好比我们听音乐的时候,不同的音符有不同的频率和相位。
这束光也是一样,它在传播的过程中,相位会发生变化。
我们通过检测这个相位的变化,就能知道光跑了多远啦!
说起来简单,实际可复杂着呢!这就像是解一道很难的谜题。
我们得非常精确地测量和分析这个相位的变化。
就好像你要在一堆沙子里找出一粒特别的沙子一样,需要特别的细心和耐心。
那这相位式光电测距有啥用呢?哎呀,用处可大了去了!比如在建筑工地上,工程师们要用它来精确测量距离,这样才能保证建筑物建得稳稳当当的呀!还有在测绘领域,没有它,那些地图可就没那么准确啦!
而且哦,这技术还在不断发展和进步呢!就跟我们人一样,不断学习,不断变得更好。
以后说不定能测的距离更远更精确呢!
总之呢,相位式光电测距真的是个了不起的东西。
它就像我们的眼睛一样,能帮我们看到那些我们用普通方法看不到的距离和细节。
它让我们的生活变得更方便,让我们的世界变得更精彩!所以啊,可别小看了这小小的相位式光电测距哦,它可是有着大大的能量呢!。
光电追踪系统的设计原理和实践

光电追踪系统的设计原理和实践光电追踪系统的设计原理和实践光电追踪系统是一种基于光电传感器和追踪算法的系统,可以实时监测和跟踪目标物体的运动轨迹。
它在许多领域有着广泛的应用,如自动驾驶、机器人导航和安防监控等。
本文将介绍光电追踪系统的设计原理和实践。
光电追踪系统的设计原理主要包括硬件和软件两个方面。
在硬件方面,系统使用光电传感器来接收光信号,并将其转换为电信号。
光电传感器通常采用光敏电阻、光电二极管或光电三极管等。
通过合理的电路设计和信号放大,可以提高光电传感器的灵敏度和抗干扰能力。
在软件方面,光电追踪系统需要进行目标的检测、识别和跟踪。
目标检测是指在图像或视频中找到目标物体的位置和大小。
常用的目标检测算法有Haar特征检测、HOG特征检测和深度学习等。
一旦目标被检测到,系统会使用跟踪算法来实时跟踪目标的位置和运动轨迹。
常见的跟踪算法有卡尔曼滤波、粒子滤波和相关滤波等。
这些算法可以根据目标的运动特征和环境条件,实现快速准确的目标跟踪。
在实践中,光电追踪系统的应用非常广泛。
例如,在自动驾驶中,光电追踪系统可以实时跟踪周围车辆和行人的位置和速度,从而实现自动驾驶车辆的安全行驶。
在机器人导航中,光电追踪系统可以帮助机器人识别和跟踪目标位置,实现自主导航和定位。
在安防监控中,光电追踪系统可以实时监测和跟踪可疑人员或物体的移动轨迹,提高安全性和保护效果。
然而,光电追踪系统也面临一些挑战和限制。
首先,光电传感器的灵敏度和分辨率会影响系统的跟踪精度和速度。
其次,环境因素如光照、背景干扰和目标遮挡等,也会对系统的性能产生影响。
此外,系统的实时性和算法的复杂度也是需要考虑的因素。
总结来说,光电追踪系统是一种基于光电传感器和追踪算法的系统,可以实现目标的实时监测和跟踪。
通过合理的设计原理和实践,光电追踪系统在许多领域有着广泛的应用。
然而,系统还面临一些挑战和限制,需要进一步研究和改进。
希望随着技术的发展和创新,光电追踪系统能够在更多的领域发挥其重要作用。
lds激光导航原理
lds激光导航原理
LDS(Laser Distance Sensor)激光导航系统是一种基于激光技
术的室内导航系统。
其原理是通过激光传感器发射出的激光束,测量激光束与房间内物体之间的距离,从而确定机器人在室内的位置和姿态。
激光导航系统通常包括以下几个主要组件:
1. 激光传感器:激光传感器用于发射激光束,并接收反射回来的激光信号。
传感器通常采用扫描式激光器,可以旋转或扫描发射激光束,以获取房间各处的距离信息。
2. 反射镜:反射镜用于将激光束引导到不同的方向,以覆盖整个房间。
激光束被反射镜反射后,可以沿不同方向传播,从而实现对房间各处的测量。
3. 障碍物检测:激光传感器还可以通过测量激光返回的强度来检测房间内的障碍物。
当激光束遇到障碍物时,一部分激光束会被反射回来,传感器可以通过测量返回的激光强度来确定物体的距离和位置。
4. 地图生成:通过将房间各处测量得到的距离信息整合起来,可以生成地图。
地图可以用来表示房间内的障碍物、墙壁等,并作为导航的参考。
5. 定位算法:基于传感器测量的距离信息和生成的地图,可以通过定位算法确定机器人在室内的位置和姿态。
常用的算法包
括概率定位算法(如粒子滤波器)和扩展卡尔曼滤波器等。
综上所述,LDS激光导航系统通过激光传感器测量激光与物体之间的距离,结合障碍物检测和定位算法,可以确定机器人在室内的位置和姿态,实现精确的导航和避障功能。
光电测距高程测量操作流程

光电测距高程测量操作流程一、前期准备。
咱要进行光电测距高程测量呀,那前期准备可不能马虎。
这就像出门旅行,得把东西都带齐喽。
测量仪器是关键。
光电测距仪得好好检查,看看各个部件是不是都正常,有没有损坏的地方。
这仪器就像咱的宝贝武器,要是有个闪失,测量可就进行不下去啦。
电池也要充满电,可别到了测量一半的时候没电了,那就尴尬得像表演节目突然忘词一样。
还有棱镜,这也是个重要角色。
要保证棱镜干净整洁,要是上面脏脏的,那测量出来的数据可能就像被蒙上了一层雾,不准确啦。
另外,记录表格也不能忘。
这就好比是咱测量旅程的小账本,要把测量过程中的各种数据都清楚地记在上面。
找个小本子,或者用电子表格也行,只要方便记录就好。
二、测量站点选择。
接下来就是选择测量站点啦。
这可有点像选房子,要找个好位置。
站点要选在视野开阔的地方。
你想啊,如果周围都是障碍物,光电测距仪的视线都被挡住了,还怎么测量远处的高程呀。
就像你想看看远方的风景,结果前面全是高楼大厦,啥也看不见。
而且站点要尽量稳定。
要是选在一个摇摇晃晃的地方,比如刚铺好还没压实的土堆上,那测量的时候仪器也跟着晃悠,数据肯定不准。
这就好比在船上写字,船一直晃,字能写好吗?还有哦,要考虑到测量的方便性。
站点到待测点之间最好没有太多干扰因素,比如大片的水域或者特别复杂的地形。
要是有,那测量起来可就费劲了,就像在荆棘丛里走路,磕磕绊绊的。
三、仪器安置。
好啦,站点选好之后,就要安置仪器了。
先把光电测距仪稳稳地放在站点上。
要调整好仪器的水平,这就像把桌子放平稳一样重要。
要是仪器歪歪扭扭的,那测量出来的高程数据肯定也是歪的。
可以通过仪器上的水平气泡来调整,让气泡在中间,就像让小珠子待在碗底一样。
然后把仪器对准棱镜。
这个过程要细心一点,就像拿枪瞄准目标一样。
要是没对准,那测距就不准啦。
可以通过仪器上的瞄准镜来调整方向,直到清晰地看到棱镜为止。
四、测量操作。
开始测量啦,这可是最关键的部分。
先进行距离测量。
偏振导航光电测试系统设计与实验分析的开题报告
偏振导航光电测试系统设计与实验分析的开题报告题目:偏振导航光电测试系统设计与实验分析一、选题背景随着航空航天技术的不断发展,对于导航系统的要求越来越高。
在光电导航系统中,偏振技术被广泛应用。
偏振导航技术可以通过对光波的偏振状态进行测量和分析来确定飞行器的位置、速度和姿态等信息,具有精度高、稳定性好、抗干扰能力强等优点。
因此,设计一种高精度的偏振导航光电测试系统,对于提高光电导航系统的稳定性和精度,具有重要意义。
二、研究目的本研究旨在设计一种高精度的偏振导航光电测试系统,通过对光波的偏振状态进行测量和分析,实现飞行器的位置、速度和姿态等信息的确定。
主要研究内容包括:1. 偏振技术的原理及在光电导航中的应用。
2. 偏振导航光电测试系统的设计和实现,包括硬件和软件设计。
3. 基于该系统的实验研究,对其性能进行验证和分析。
三、研究内容和方法1. 偏振技术的原理及在光电导航中的应用介绍偏振技术的原理和基本概念,探讨其在光电导航中的应用,分析其优势和局限性。
2. 偏振导航光电测试系统的设计和实现根据光学原理和偏振技术的实现方式,设计偏振导航光电测试系统,包括硬件和软件设计。
其中,硬件部分主要涉及光路设计、光电检测器、信息采集和处理器等;软件部分主要包括信号处理、数据分析和算法设计等。
3. 基于该系统的实验研究在实验室中搭建系统,对该系统进行性能测试和实验研究。
主要包括:光电探测器的灵敏度检测、光学偏振器的精度测试、光路的校准、系统输出的精度测试等。
在此基础上,通过实验数据的分析和处理,对系统进行性能验证和分析。
四、研究预期成果1. 设计并实现了一种高精度的偏振导航光电测试系统。
2. 对偏振技术在光电导航中的应用进行了探讨和分析,揭示了其优点和局限性。
3. 基于该系统进行了实验研究,对该系统的性能进行了分析和验证。
提出了可能的优化方案,为进一步提高偏振导航光电测试系统的精度和稳定性提供了基础和参考。
五、进度安排1. 第一阶段:2022年3月-2022年5月,完成偏振技术的原理探讨和系统设计的初步方案。
光电测距仪测距
1.安置仪器
先在测站上安置好经纬仪,对中、整 平后,将测距仪主机安装在经纬仪支架上, 用连接器固定螺丝锁紧,将电池插入主机 底部、扣紧。
在目标点安置反射棱镜,对中、整平, 并使镜面朝向主机。
2.观测垂直角、气温和气压
用经纬仪十字横丝照准觇板中心,测
出垂直角α。
同时,观测和记录温度和气压计上的 读数。
一、光电测距原理
可在A点安置能发射和接收光波的光电测距仪,在B 点设置反射棱镜。
光电测距仪发出的光束经棱镜反射后,又返回到测距 仪。
通过测定光波在AB之间传播的时间t,根据光波在大 气中的传播速度c,按下式计算距离D:
D 1 ct 2
B A
D
光电测距仪测定时间t的方式一般 采用相位式。
二、光电测距仪操作与使用
(2)测线应尽量离开地面障碍物1.3m 以上,避免通过发热体和较宽水面的上空。
(3)测线应避开强电磁场干扰的地方, 例如测线不宜接近变压器、高压线等。
(4)镜站的后面不应有反光镜和其他 强光源等背景的干扰。
(5)要严防阳光及其他强光直射接收 物镜,避免光线经镜头聚焦进入机内,将 部分元件烧坏,阳光下作业应撑伞保护仪 器。
一般情况下,只要使用同一类的反光 镜,棱镜常数不变,而温度、气压每次观 测均可能不同,需要重新设定。
4.距离测量
调节主机照准轴水平调整手轮(或经 纬仪水平微动螺旋)和主机俯仰微动螺旋, 使测距仪望远镜精确瞄准棱镜中心。
在显示“good”状态下,精确瞄准也 可根据蜂鸣器声音来判断,信号越强声音 越大,上下左右微动测距仪,使蜂鸣器的 声音最大,便完成了精确瞄准,出现 “*”。
光电测距以光波作为载波,通过测定光电波 在测线两端点间往返传播的时间来测量距离。
任务三光电测距仪原理及全站仪使用

任务三 光电测距仪原理及全站仪使用【任务介绍】本任务主要介绍电磁波测距原理、测距精度、全站仪的原理及操作方法。
通过本任务的学习,学生可具备操作全站仪测距、测角、测坐标的能力。
【任务目标】知识目标:⊙ 掌握电磁波测距的原理;⊙ 掌握全站仪的原理及使用方法。
技能目标:⊙ 培养电磁波测距的理解能力;⊙ 培养使用全站仪测角、测距的操作能力。
【任务实施】一、电磁波测距基本方法电磁波测距(简称EDM )是利用电磁波作为测距信号和载波进行长度测量的一门技术。
电磁波的波谱包括:无线电波(含微波)、红外光、可见光、紫外光、x 射线和γ射线等。
电测波测距是通过测定电磁波波束在待测距离上往返传播的时间来确定待测距离的。
如图 4-9 所示,欲测量 A 、B 两点间的距离 D ,在 A 点安置电磁波测距仪,在B 点设置反射棱镜,测距仪发出的电磁波信号经反射棱镜反射又回到测距仪主机。
如果测定电磁波信号在 A 、B 往返之间传播的时间t ,则距离D 可按下式计算:12D c t =⋅ (4-13)式中,c 为电磁波在大气中的传播速度(约等于3×108 m/s )。
而电磁波往返传播的时间t ,可以直接测定,也可以间接测定。
图4-9 电测波测距基本方法不难看出,利用电磁波测距,只要在测距仪的测程范围内中间无障碍,在任何地形条件下的距离测量都是十分快捷便利的。
因此,电磁波测距被广泛用于大地测量、工程测量、地形测量、地籍测量和房地产测绘。
二、电磁波测距仪种类电磁波测距仪按原理分为脉冲式测距仪、相位式测距仪、脉冲-相位式测距仪;按载波不同分为微波测距仪、激光测距仪、红外测距仪等;按结构分为分离式测距仪、组合式测距仪;按精度分为Ⅰ级(m D≤5 mm)、Ⅱ级(5 mm≤m D≤10 mm)、Ⅲ 级(10 mm≤m D≤20 mm);按测程分为短程测距仪、中程测距仪和远程测距仪等几种。
微波和激光测距仪多属于长程测距,测程可达 60 km,一般用于大地测量;而红外测距仪属于中、短程测距仪(测程为 15 km 以下),一般用于小地区控制测量、地形测量、地籍测量和工程测量等。
光电测距开关的操作方法

光电测距开关的操作方法
光电测距开关的操作方法分为以下几个步骤:
1. 准备工作:插上电源,激光开关处于待机状态
2. 调节距离参数:根据实际需要,通过旋转距离调节器调节开关的距离参数,可以选择不同的检测距离
3. 定位光电测距开关:将开关放置在待测目标物体的适当位置,并确保光电测距开关的激光射线能够正常照射到目标物体
4. 进行测距:当目标物体与光电测距开关的激光射线相遇时,开关将发出信号,实现测量
5. 结束操作:当测距任务完成后,需要关闭操纵开关并切断电源,以免浪费电能和保证设备安全。
需要注意的是,在使用光电测距开关的过程中,一定要避免使用强光直接照射到光电测距开关的激光射线,这会影响信号获取和测距的准确性。
光电测距(1)
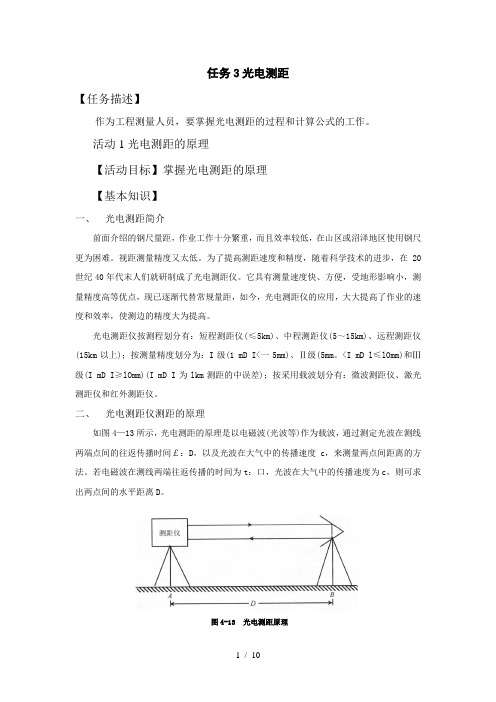
任务3光电测距【任务描述】作为工程测量人员,要掌握光电测距的过程和计算公式的工作。
活动1光电测距的原理【活动目标】掌握光电测距的原理【基本知识】一、光电测距简介前面介绍的钢尺量距,作业工作十分繁重,而且效率较低,在山区或沼泽地区使用钢尺更为困难。
视距测量精度又太低。
为了提高测距速度和精度,随着科学技术的进步,在20世纪40年代末人们就研制成了光电测距仪。
它具有测量速度快、方便,受地形影响小,测量精度高等优点,现已逐渐代替常规量距,如今,光电测距仪的应用,大大提高了作业的速度和效率,使测边的精度大为提高。
光电测距仪按测程划分有:短程测距仪(≤5km)、中程测距仪(5~15km)、远程测距仪(15km以上);按测量精度划分为:I级(1 mD I<一5mm)、Ⅱ级(5mm。
<I mD l≤lOmm)和Ⅲ级(I mD I≥lOmm)(I mD I为lkm测距的中误差);按采用载波划分有:微波测距仪、激光测距仪和红外测距仪。
二、光电测距仪测距的原理如图4—13所示,光电测距的原理是以电磁波(光波等)作为载波,通过测定光波在测线两端点间的往返传播时间£:D,以及光波在大气中的传播速度c,来测量两点间距离的方法。
若电磁波在测线两端往返传播的时间为t:口,光波在大气中的传播速度为c,则可求出两点间的水平距离D。
图4-13 光电测距原理D=1/2c*t2D (4—11)式中:c——光波在大气中的传播速度。
(c。
为光波在真空中的传播速度,反射棱镜其值为299 792 458m/s;n为大气折射率,是大气压力、温度、湿度的函数);f:D——光波在被测两端点间往返传播一次所用的时间(s)。
从式(4—11)可知,光电测距仪主要是确定光波在待测距离上所用的时tzD,据此计算出所测距离。
因此测距的精度主要取决于测定时间t:D的精度,时间£zD的测定可采用直接方式,也可采用间接方式,如要达到±1em的测距精度,时间量测精度应达到6.7×10‘11 s,这对电子元件的性能要求很高,难以达到。
光电测距的操作方法
光电测距的操作方法
光电测距是一种利用红外线或激光发射器发射出的光信号,通过被测目标反射回的光信号来测量距离的技术。
操作方法如下:
1. 首先,准备好光电测距仪器。
这包括一个光源(可以是红外线发射器或激光发射器)、一个接收器和一个计算或显示装置(如计算机或显示屏)。
2. 将光源和接收器正确地安装在被测物体的两侧。
确保它们之间没有任何遮挡物,并且光源和接收器之间的距离已经确定。
3. 打开光电测距仪器的电源,并调整相关参数。
这些参数包括激光或红外发射的功率、接收器的灵敏度等。
4. 将目标物体放置在光源和接收器之间,并确保它是垂直于光源方向放置的。
5. 启动光电测距仪器,激光或红外信号将被发射到目标物体上并反射回来。
6. 接收器将接收到的光信号转换为电信号,并将其传输到计算或显示装置上。
7. 根据接收到的信号,计算或显示装置将计算出目标物体与光源-接收器之间的距离,并将其显示出来。
需要注意的是,在操作光电测距仪器时,必须注意一些安全事项:
- 避免将光线直接照射到眼睛,以免造成眼部损伤。
- 在使用激光发射器时,必须遵守相关的安全标准,以防止激光辐射对人体产生伤害。
- 在操作测距仪器时,特别是在室外使用时,应注意避免光线被遮挡或反射,以确保测距结果的准确性。
光电导航系统的原理及定位精度提高

光电导航系统的原理及定位精度提高光电导航系统是利用光学和电子技术相结合,通过接收地面基站或卫星发出的信号,实现航行定位和导航的一种智能化系统。
它具有高定位精度、强抗干扰能力等特点,并在航空、航海、无人驾驶等领域得到了广泛的应用。
本文将详细介绍光电导航系统的原理以及如何提高其定位精度。
一、光电导航系统的原理光电导航系统主要由测距系统、导航系统和定位系统三部分组成。
1. 测距系统光电导航系统的测距系统通过接收地面基站或卫星发出的光信号,利用光电传感器将光信号转换为电信号。
光电传感器通常采用光电二极管或光电三极管,能够高效地将光信号转化为电压信号。
测距系统的精度直接影响着光电导航系统的定位精度,因此需要选用高灵敏度、低噪声的光电传感器。
2. 导航系统导航系统是光电导航系统的核心部分,它利用接收到的光信号进行数据处理和分析,确定船舶、飞机或车辆的位置、方向以及速度等重要信息。
导航系统通常由嵌入式处理器、算法模块和显示装置等组成。
嵌入式处理器负责数据的采集、处理和存储,算法模块则根据光信号的特征进行算法设计,实现位置计算和导航参数的估算。
显示装置将导航结果以图形或文字的形式展示给操作人员。
3. 定位系统定位系统是光电导航系统的关键组成部分,它主要通过测量对象与地面基站或卫星的相对位置,确定测量对象的准确位置。
目前常用的定位技术包括全球定位系统(GPS)、北斗导航系统以及惯性导航系统等。
通过将定位系统和导航系统结合,光电导航系统能够实现高精度的定位和导航。
二、提高定位精度的方法光电导航系统的定位精度对于航行安全具有重要意义。
为了提高定位精度,可采取以下方法:1. 增加测距系统的精度通过改进光电传感器的制造工艺和选用更高性能的光电器件,可以提高测距系统的灵敏度和抗干扰能力。
此外,合理设计光电传感器的光学组件,减小光信号的传输损耗,也能有效提高测距系统的精度。
2. 引入多源定位技术单一定位技术在特定环境下可能存在精度不足的问题。
飞行器的光电导航系统研究
飞行器的光电导航系统研究随着科技的不断发展,飞行器已成为了人们生活中必不可少的交通工具之一。
飞行器的光电导航系统也随着科技的不断进步而得到了极大的改善和发展。
本文将对飞行器的光电导航系统进行研究和探讨。
一、飞行器的光电导航系统概述飞行器的光电导航系统主要由光学器件、光电器件和信息处理部分三部分组成。
光学器件主要包括衍射光栅、晶体、光纤等光学元件;光电器件主要包括光电二极管、光电倍增管、光电子管等;信息处理部分主要由信号检测、信号放大、滤波、数字处理等模块组成。
总体而言,飞行器的光电导航系统主要是通过对光学信号的接收、放大和处理,实现对飞行器的精确定位、导航和控制等功能。
二、飞行器的光电导航系统优点与传统导航系统相比,飞行器的光电导航系统具有如下优点:1. 精度高:光电导航系统采用光学技术进行导航,具有非常高的精度和稳定性,可以实现厘米级别的定位。
2. 抗干扰性好:由于光学信号的传输不易受到干扰,因此光电导航系统在强电磁干扰的环境下仍能正常工作。
3. 无线传输:光电导航系统采用无线传输技术,避免了传统导航系统的场地限制和信号干扰问题。
4. 节能环保:光电导航系统无需使用传统导航系统中的电池和其他高能耗设备,因此具有节能环保的优点。
三、飞行器光电导航系统的应用飞行器的光电导航系统主要应用于以下几个方面:1. 无人机:无人机是近年来发展非常迅猛的行业之一。
光电导航系统可以为无人机提供精密控制和导航,使其具有更广阔的应用前景。
2. 载人飞行器:载人飞行器是人类追求航空梦想的重要标志。
光电导航系统的高精度和稳定性为载人飞行器的操作提供了技术支持。
3. 船舶导航:随着全球经济的快速发展,船舶导航逐渐成为了关注的热点。
光电导航系统可以为船舶提供高精度的定位和导航服务。
四、飞行器光电导航系统的研究进展飞行器光电导航系统的研究一直处于不断发展的状态。
当前,业界的研究重点主要集中在以下几个方面:1. 光学器件的研发:光学器件是光电导航系统的核心部分。
光电测距的基本原理
光电测距的基本原理
光电测距是一种利用光电技术进行测距的方法。
它的基本原理是利用光的传播速度和接收到的信号来计算目标物体与检测器之间的距离。
在光电测距系统中,发射器会发出一个脉冲光束,并在固定的时间间隔后接收该脉冲的反射光。
发射光束往往是脉冲激光或者连续的激光光束。
当光束射向目标物体时,一部分光会被目标物体反射回来,然后被接收器接收。
接收到的光信号会经过光电转换器转换成电信号,并送入信号处理电路进行处理。
处理电路会计算出光束从发射器到目标物体再回到接收器所需要的时间。
这个时间与光的传播速度以及光束的发射器和接收器之间的距离有关。
通过测量时间和光速的关系,可以计算出目标物体与检测器之间的距离。
例如,如果我们已知光的传播速度为c,发射到接收器所需时间为t,那么目标物体与检测器之间的距离d可以用以下公式计算:
d = (c * t) / 2
其中的除以2是因为光束在从发射器到目标物体再回到接收器的过程中,需要经过来回两次传播的距离。
总的来说,光电测距利用光的传播速度和接收到的信号来计算
目标物体与检测器之间的距离。
它在工业、测绘、机器人等领域有着广泛的应用,可以实现高精度的距离测量。
光电探测技术在航天器导航中的应用研究
光电探测技术在航天器导航中的应用研究随着科技的不断发展,空间探索和航天技术在人类历史中扮演越发重要的角色。
然而,在这些冒险活动中,导航机制的关键性快速呈现。
在许多情况下,特别是在探索远离地球的地方时,准确的导航手段是人类在航天领域中的关键需求。
而这一需求的实现,光电探测技术在其中扮演了至关重要的角色。
光电探测技术,是通过光电反应将光信号转变为经过处理的电信号的一种技术手段。
这其中的一个主要应用领域,就是在航天器导航系统中的应用。
首先,光电导航技术可以通过光学影像,帮助航天器在太空环境中准确的定位。
这种技术可以通过设备获取一定地球表面上的影像数据,然后将其与先前记录的数据进行比对。
通过遥感技术,卫星可以记录对行星表面的影像,重点表现出地形和树木的密度。
通过经过计算的GPS数据和卫星图像,可以建立高精度的地图和导航系统。
在导航过程中,飞行员可根据卫星图像和高精度地图,进行飞行路径规划,以显示任何重要的地物和空气境内的重要风险。
其次,在光电探测技术中,GPS成为了航天行业的标准。
GPS被广泛用于飞行器导航、遥感、科学研究以及通信系统等诸多领域。
较而言之,GPS在航天领域的应用尤为广泛。
过去的绝大多数航天任务,都需要使用GPS来提供航向定位、速度、姿态以及星敏感器和地磁传感器数据的失效检测。
通过GPS测量,可以精确的确定航空器的位置,速度和方向。
在很多探索任务中,NASA利用GPS卫星和其他卫星系统及独立编程,定位火星科学实验室(Mars Science Lab)降落点的位置。
如果没有这些现代化的导航技术,有很多非常有挑战性的任务就无法成功完成。
最后,在某些限制情况下,光电探测技术还可以采用惯性导航技术。
当卫星不可用或信号丢失时,自主导航方法可以通过内部测量单位,在限制时间内连续导航。
而惯性导航通过内部加速度计和陀螺仪等测量装置,确定飞行器的速度和位置。
在光电探测技术中,惯性导航是不可缺少的一项技术手段。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
同理可得:
1 T E1 − E 2 = g2 d + d T H 2 d + ... 2 1 E 2 − E1 = − g1T d + d T H1d − ... 2
(3) (4)
24
中国惯性技术学报
2006 年 8 月
定义向量 d、灰度梯度函数 g、灰度 Hessian 矩阵 H 分别为:
⎡∆x ⎤ d = ⎢ P⎥, ⎣∆yP ⎦
图1
梳状驱动叉指式振动陀螺仪
小。所以微机械陀螺仪的精度在短途 飞行中是能够满足系统的要求。从而 能够为光电导航测距系统提供必要的 导航计算参数,进行组合导航测距。
Scale factor accuracy/ % Full scale range/(°)•s Band width/Hz
-1
第4期
屈重君等: 基于 MEMS 的光电导航测距系统研究
况下惯性辅助光电导航系统就会在广泛的应用与制导系统时受到限制,也就会限制发挥其导航制导隐蔽 性高、导航精度高、抗干扰的优势。基于系统这个缺点,本文提出一种新的方法,用 MEMS(微机电系 统) 惯性元器件 (微机械陀螺和加速度计) 代替传统的惯性元器件组成惯性辅助导航系统, 提供给 EOANS (光电测距系统)所需要的导航参数,用于进一步的导航测距计算。由于 MEMS 系统本身的结构小特 点,所以这种新的导航测距系统体积小、造价也低,能够广泛的应用于制导等领域。便克服上面所提出 的问题,并且广泛的应用与制导领域。 2 2.1 2.1.1 光电系统原理 测距算法的研究 测距原理简述
单晶硅平板 Zc 梳状电极
[6]
表1给出了陀螺应用的三个级别的性能指标, 图1给出了一种 微机械陀螺仪的内部结构。 现在出现的各种微机械陀螺基本处于 Rate Grade 级别,不能满足战术级和导航级的需要。 但是在制导 领域中, 由于制导级别飞行的距离相对于导航级别飞行的距离很
Zc 挠性支臂 X 驱动轴 敏感电极 单晶硅 底座 ω输入轴 输出轴 Y
E 1 (X P , YP ) = E 2 (xP + ∆xP2 , yP + ∆yP2 ) E 2 (X P , YP ) = E 1 (xP − ∆xP1 , yP − ∆yP1 )
通过二阶 Taylor 展开,方程(1)和(2)可表示为:
(1) (2)
在方程(1)和(2)中,( ∆xP1 , ∆yp1 ) 、 ( ∆xP2 , ∆yp2 )是目标物上的某一点在两幅图片的对应点的坐标差。
25
3.2
导航测距系统结构图 根据上面所陈述的原理和结构,我们设计
灰度补偿 摄像机 陀螺仪 加速度计
拍摄 图片 姿态
出了导航测距系统的硬件结构连接图(图 2)。 从结构图可以看出,系统完全是由两个独立 的系统构建而成,上面的一部分是测距系统,下 面的是导航系统。所以说导航测距系统不仅能够 导航而且能够测距,解算出来的导航测距参数进 一步提供给执行机构,从而完成测距和导航要求。 4对应点之间的灰度值和坐标值进行比较,结合惯性导航系统 的输出信号(飞行器的航姿参数),与图像灰度进行组合解算(导航测距解算),便可得到运载体与目 标物间的距离 。 2.1.2 相关坐标系定以及灰度方程介绍
[5]
在整个算法中用了四个坐标系, 分别是图像平面坐标系、 照相机坐标系、 机体坐标系和地理坐标系。 具体定义如下: (1)图像平面坐标系 OX p Yp :该坐标系的 X P 轴指向右边, YP 轴指向上方。 (2)照相机坐标系 OX cYc Z c :该坐标系的 X C 轴平行于图像平面坐标系的 X P 轴, Yc 轴经过图像平面 坐标系的原点且 X c、Yc 轴形成的平面垂直于图像平面, Z c 轴平行于图像平面坐标系的 YP 轴。 (3)机体坐标系 OX bYb Z b :该坐标系的 X bYb Z b 三轴与照相机坐标系 X cYc Z c 三轴之间的夹角分别为
收稿日期:2006-06-21 作者简介:屈重君(1983—) ,男,西安飞行自动控制研究所研究生,从事导航制导与控制研究 电子邮箱:quzhongjun@
第4期
屈重君等: 基于 MEMS 的光电导航测距系统研究
23
1
问题的提出 传统的惯性辅助光电导航测距系统对于惯性导航系统的要求比较高,而且造价高、体积大。这种情
[ xc
yc
z c ] = T1 [ x b − l1
T
y b − l2
z b − l3 ]
T
(6)
其中 T1 是方向余弦阵。同样利用定义的坐标关系可以得到目标物相对于地理坐标系的坐标(x, y, z):
⎡x⎤ ⎢y⎥ = T T 2 ⎢ ⎥ ⎢ ⎥ z ⎣ ⎦ ⎛ ⎜ T ⎜ T1 ⎜ ⎝ ⎡ x c ⎤ ⎡ l1 ⎤ ⎞ ⎢ y ⎥ + ⎢l ⎥ ⎟ ⎢ c⎥ ⎢ 2⎥⎟ ⎟ ⎢ ⎣ zc ⎥ ⎦ ⎢ ⎣ l3 ⎥ ⎦⎠
第 14 卷第 4 期 Vol.14 No.4
中国惯性技术学报 Journal of Chinese Inertial Technology
2006 年 8 月 Aug. 2006
·组合导航技术·
文章编号:1005-6734(2006)04-0022-04
基于 MEMS 的光电导航测距系统研究
屈重君,陆志东
(7)
从而则得到目标物到飞行器的距离为:
D = x2 + y2 + z 2
(8)
式中,摄像机初始位置向量为( l1 , l2 , l 3 ),从机体坐标系到地理坐标系的瞬间转换矩阵为 T2 ,其变化矩 阵 ∆T2 ,从机体坐标到照相机坐标系的变化矩阵为 T1。照相机的焦距 f 可以由机载仪器读出,飞行器的 航姿参数、飞行器飞过的距离都可以由惯导系统给出。 3 3.1 辅助导航系统 微机械陀螺仪与加速度计 随着微机电系统(MEMS)技术的发展, 作为测量物体相对惯性空间转动角速度或角度的微机械陀螺 仪和微加速度计, 由于具有体积小, 质量轻, 成本低, 功耗微, 可靠性高等优点, 在汽车安全、惯性导 航、机器人控制等军民用领域, 具有广阔的应用前景, 特别是微卫星、微飞行器等武器装备更是对微陀 螺提出了轻小化、高精度的要求。低成本、高精度的微机械陀螺仪成为目前微陀螺研究的主攻方向 。 本文的解决思想就是基于微机械陀螺仪和加速度计的这些优点和性能而提出的。进而取代传统的惯 性辅助导航系统在制导领域的应用。
ε1 、ε 2 、ε 3 。照相机坐标系的原点在机体坐标系中的坐标为( l1 , l2 , l3 )。
(4)地理坐标系 OXYZ:该坐标系的 X 轴指向东,Y 轴指向北,Z 轴指向天,机体坐标系 X bYb Z b 与 地理坐标系三轴之间的夹角分别为ψ 、 θ 、 φ 。 在图像平面坐标系中,我们定义图像的灰度分布函数为 E( X P , YP ),E 为图像平面上的点( X P , YP ) 处的灰度值。令 E 1 ( X P , YP )与 E2 ( X P , YP )为同一目标的两幅不同的图像的灰度值。当然这两幅图片必须 包含所有我们需要的目标,而且我们假设在整个拍摄过程中,光照度和目标的反射率保持恒定,也就是 说,目标上的任意点在两幅图像上的对应点的灰度值相同,即:
存储器
提取 图片
Kalman 滤波
灰度 比较 航姿
测距计算
距目标的距离 位置和速度
姿态解算 比力分解
比力
导航计算 重力补偿
位置和速度
图2
导航测距系统的硬件连接图
基于上面的设计我们进行了仿真试验。试验数据进一步表明了,利用微机械陀螺仪和加 度和抗干扰等性能指标均能到达要求。试验仿真数据如下: 对于目标位于飞行器侧向(摄像机移动距离为 2.87 m,样本点分别为 5 和 10 个):
(西安飞行自动控制研究所,西安 710065) 摘要:提出一种用 MEMS(微机电系统)惯性元器件(微机械陀螺和加速度计)代替传统的惯性元 器件组成惯性辅助导航系统这种新方法,提供给 EOANS(光电测距系统)所需要的导航参数, 用于进一步的测距计算。由于 MEMS 系统本身的结构特点,这种新的测距系统体积小、造价低, 能够广泛应用于制导等领域。文中最后还给出了仿真试验的数据,结果表明该方法能保证整个 测距系统的可行性。 关 键 词:MEMS;微机械陀螺;光电辅助导航测距系统;灰度值;卡尔曼滤波; 文献标识码:A 中图分类号:U666.1
Electrical-optical navigation and measurement system based on MEMS
QU Zhong-jun, LU Zhi-dong (Flight Automatic Control Research Institute, Xi’an 710065, China) Abstract: This paper gives a new method, which uses the MEMS inertial equipments (Micro-machined gyroscope and accelerometer) to provide the navigation data for EOANS (electro-optical aided navigation system) instead of the traditional inertial equipments. Because of the traits of the MEMS, the volume is quite small and the cost is low comparatively. This kind of measurement system can be widely used in guidance and navigation field. Finally, the paper gives the experimentation result to promise the feasibility and correctness of whole system. Key words: MEMS; micro gyroscope; EOANS (electro-optical aided navigation system); grey scales; Kalman filter 0 引 言 光电辅助导航(EOAN, Electro-Optical Aided Navigation)技术是最近出现的新型导航技术, 它是利用 视频摄像机实时的采集数据(数字地图或者数字图片) ,经过数据处理(卡尔曼滤波) ,应用相应的算法 计算出飞行器实时的空间位置,为飞行器和武器系统提供导航参数。 INS(Inertial Navigation System)即所谓的惯性导航系统,是一种导航精度高、自主性强、隐蔽性 高,能够适应各种环境的导航系统,是目前最主流的导航系统,并且能够与各种非惯性导航系统(GPS 导航系统、地形匹配导航 、图像匹配导航、无线电导航、天文导航等等导航系统)进行组合导航,克 服单个导航系统的不足,从而提高导航系统的导航精度,降低导航系统的造价。