施耐德ATV31变频器调试指南.
ATV变频器调试步骤

ATV变频器调试步骤ATV(Adjustable frequency drive,或称为变频器)用于控制交流电机的转速和运行状态。
在安装和调试ATV变频器之前,需要对其进行一系列的步骤。
1.在开始调试之前,确保已阅读变频器的使用说明书,并熟悉其参数和功能。
了解变频器的工作原理以及各个参数对电机的影响是非常重要的。
2.确保所有的电气连接已正确接线。
这包括将主电源和电机连接到变频器的输入端口,并确保所有的接线牢固可靠。
3.如果电机需要额外的传感器接口(例如温度传感器或霍尔传感器),则需要将它们正确连接到变频器的相应输入端口。
4.检查变频器的接地线是否与机箱内的接地点连接良好。
良好的接地是确保系统安全运行的重要因素。
5.将变频器的控制线缆连接到控制终端设备,例如PLC或控制面板。
确保控制终端设备正确配置,并能与变频器进行通信。
6.基于所需的运行条件,调整变频器的参数。
这些参数包括最大输出频率、最大输出电流、加速和减速时间、过载保护等等。
确保这些参数与电机的额定参数相匹配。
7.对变频器进行初次上电。
在开始操作之前,确保已正确设置变频器的参数。
使用变频器上的控制终端或控制面板进行操作。
确保变频器的输出是从0开始并缓慢增加,以避免对电机造成过大的冲击。
8.调试变频器。
在进行调试过程中,应确保变频器工作正常,并且能够根据所需的运行条件调整电机的转速和运行状态。
如果有任何异常情况,例如噪声、振动或温度过高,需要进行相应的故障排查。
9.进行性能测试。
在变频器调试完成后,运行电机以测试其性能。
这包括测试电机的转速范围、加速和减速时间、负载容量等。
确保电机在不同运行条件下都能正常工作。
10.进行最终验证。
在完成调试和性能测试后,对整个系统进行最终验证。
确保变频器能够稳定控制电机的运行状态,并且没有任何异常情况发生。
总结:ATV变频器的调试分为准备工作、连接调试、参数设置、上电调试、功能调试等步骤。
在每个步骤中,需要仔细检查和验证系统的正确性,确保ATV变频器和电机能够正常工作。
ATV施耐德变频器参数设置简易

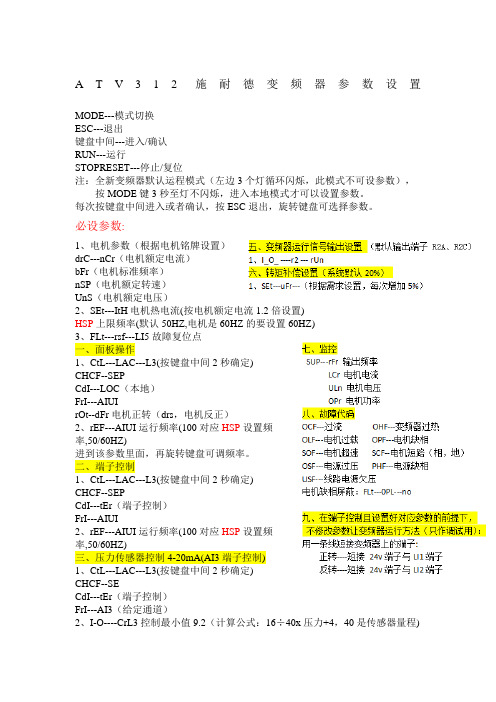
A T V312施耐德变频器参数设置MODE--- 模式切换ESC---退出键盘中间---进入/确认RUN--- 运行STOPRESET---停止 /复位注:全新变频器默认运程模式(左边 3 个灯循环闪烁,此模式不可设参数),按MODE键3秒至灯不闪烁,进入本地模式才可以设置参数。
每次按键盘中间进入或者确认,按ESC 退出,旋转键盘可选择参数。
必设参数:1、电机参数(根据电机铭牌设置)drC---nCr(电机额定电流)bFr(电机标准频率)nSP(电机额定转速)UnS(电机额定电压)2、SEt---ItH 电机热电流 (按电机额定电流 1.2 倍设置 )HSP 上限频率 (默认 50HZ,电机是 60HZ 的要设置 60HZ)3、FLt---rsf---LI5 故障复位点一、面板操作1、CtL---LAC---L3( 按键盘中间 2 秒确定 )CHCF--SEP CdI---LOC (本地)FrI---AIUIrOt--dFr 电机正转( drs,电机反正)2、rEF---AIUI 运行频率 (100 对应 HSP 设置频率,50/60HZ)进到该参数里面,再旋转键盘可调频率。
二、端子控制1、CtL---LAC---L3( 按键盘中间 2 秒确定 )CHCF--SEP CdI---tEr (端子控制)FrI---AIUI2、rEF---AIUI 运行频率 (100 对应 HSP 设置频率,50/60HZ)三、压力传感器控制4-20mA(AI3端子控制)1、CtL---LAC---L3( 按键盘中间 2 秒确定 )CHCF--SE CdI---tEr (端子控制)FrI---AI3 (给定通道)2、I-O----CrL3 控制最小值 9.2(计算公式: 16÷40x 压力 +4, 40 是传感器量程 )CrH3 控制最大值 11.2(9.2-11.2 对应 13-18MPa,稳定在 15,16MPa)AOIt--4A (传感器接线:上面有1,2,3,4角,1角是电源线,2角是信号线)四、恢复出厂设置DrC---FCS---InI (按键盘中间 2 秒,切换到 no)。
施耐德变频器调试步骤
施耐德变频器调试步骤1.施耐德变频器的安装首先,需要将施耐德变频器安装在合适的位置上。
通常情况下,变频器需要安装在通风良好、干燥清洁的环境中,以保证其正常工作。
同时,要注意将变频器与电源、电机等设备连接好,并确保连接线松紧适度。
2.施耐德变频器的接线安装完成后,需要进行施耐德变频器的接线。
首先,将电源线连接到变频器的电源输入端,再将电机线连接到变频器的电机输出端。
接线时要确保连接牢固、不松脱,以避免因接线不良而导致的故障。
3.施耐德变频器参数设置接线完成后,需要对施耐德变频器的参数进行设置。
首先,将变频器的控制方式设置为所需的模式,如V/F控制模式、矢量控制模式等。
然后,根据实际需求设置变频器的各种参数,包括电机额定功率、额定电流、额定转速等。
这些参数的设置需要参考电机的相关参数和工作要求,以确保变频器能够根据需要进行精确控制。
4.施耐德变频器的试运行设置参数完成后,可以对施耐德变频器进行试运行。
首先,将变频器的开关打开,观察各个指示灯是否正常亮起,以确保供电与连接正确。
然后,逐步增大变频器的输出频率,观察电机转速的变化,并检查电机的运行状况。
在试运行过程中,要注意观察是否出现异常情况,如噪音、振动、过载等,并根据需要进行调整。
5.施耐德变频器的功能调试试运行完成后,可以对施耐德变频器的功能进行调试。
首先,可以测试变频器的启停、正反转、多速调节等基本功能,观察是否正常工作。
然后,可以对变频器的保护功能进行测试,如过载保护、过流保护、过热保护等。
在调试过程中,可以根据需要进行参数调整,以达到最佳的控制效果。
6.施耐德变频器的性能调试功能调试完成后,可以对施耐德变频器的性能进行调试。
首先,可以测试变频器的响应速度,观察变频器对速度变化的响应时间,并根据需要进行调整。
然后,可以测试变频器的输出稳定性,观察变频器输出频率的稳定性和精度,并根据需要进行调整。
在性能调试过程中,可以对变频器进行负载测试,以确保其能够正常工作且稳定性良好。
施耐德atv31 CANopen手册

User’s manual Altivar 31 CANopenSommaire2Foreword34Master PLC+ TSX CPP 100ATV 31 drop cordVW3 CAN CA RR pEB 534EB 534ATV 31 CANopen tapVW3 CAN TAP 256789Configuration10SignallingLED state Altivar 31 / CANopen stateAvailable servicesPDO (Process Data Objects)PDO telegrams are used to exchange real-time data related to the process.PLCs refresh their inputs and outputs cyclically through PDOs (periodic variables).The Altivar 31 features two sets of predefined PDOs:•The first set of PDOs (PDO 1 mandatory for all modes) includes:-one received PDO, used to control (Control word "CMDD") the drive;-one transmitted PDO, used to monitor (Status word "ETAD") the drive.PDO 1 are asynchronous and the transmitted PDO is only sent when the value of its data changes.•The second set of PDOs (PDO 6 for velocity mode) includes:-one received PDO, used to control the drive (Control word "CMDD" and Velocity reference "LFRD"); in addition, it can be configured to include two additional variables; Control word "CMDD" and Velocity reference "LFRD" can also be replaced with any two other variables with write access rights;-one transmitted PDO, used to monitor the drive (Status word "ETAD" and Velocity actual value "RFRD"); in addition, it can be configured to include two additional variables; Status word "ETAD" and Velocity actual value "RFRD" can also be replaced with any two other variables.The communication mode of PDO 6 can be set by the user, depending on their needs: asynchronous (as for PDO 1) or cyclic, based on the reception of a synchronisation object (SYNC). A third mode is also possible, acyclic synchronous, in which the transmitted PDO is sent whenever the value of its data changes, but only during the synchronous “window” allowed by the SYNC object.In asynchronous mode "Inhibit time" and "Event timer" can be modified.SDO (Service Data Objects)SDO telegrams are used for configuration and setup. PLCs realise acyclic messaging through SDOs.The Altivar 31 manages one SDO, characterised by two COB-IDs:•one for the requests (telegrams issued by the PLC and intended to the Altivar 31);•one for the answers (telegrams sent back to the PLC by the Altivar 31)The Altivar 31 supports segment transfer.Other services•Default assignment of identifiers (COB-IDs), based on address;•NMT service: Start_Remote_Node (16#01), Stop_Remote_Node (16#02), Enter_Pre_Operational (16#80), Reset_Node (16#81), Reset_Communication (16#82);•Acceptance of broadcast on COB-ID 0;•Heartbeat object (for Altivar 31 version V1.2 and above only);•Node guarding object;•Emergency object (EMCY);•SYNC service, for the second set of PDOs (PDO 6).Service not available•Time stamp object (TIME)Address on the bus (Node-ID)Node-ID = address of the drive on the CANopen bus.“Client” designates an entity that transmits a telegram destined to the variable speed drive (example: PLC).Description of the supported identifiers (COB-IDs)Identifiers will be referred to, by their COB-ID (etc) in the removing sections of this user’s manual.The Altivar 31 supports the automatic assignment of COB-IDs, calculated using its CANopen address (only for PDOs of PDO1).Direction COB-ID DescriptionClient C Drive 000 (16#000)Network ManagemenT service (NMT)Client C Drive 128 (16#080)SYNChronisation service (SYNC)Client C Drive 12816#080+ Node-ID EMergenCY service (EMCY)Client B Drive 38416#180+ Node-ID Drive monitoring (transmitted PDO of PDO 1)Client C Drive 51216#200+ Node-ID Drive control (received PDO of PDO 1)Client B Drive 64016#280+ Node-ID Drive and motor monitoring (transmitted PDO of PDO 6)Client C Drive 76816#300+ Node-ID Drive and motor control (received PDO of PDO 6)Client B Drive 140816#580+ Node-ID Answer to drive adjustment (transmitted SDO)Client C Drive 153616#600+ Node-ID Request of drive adjustment (receive SDO)Client C Drive 179216#700+ Node-IDNetwork management (NMT, Node Guard, Heartbeat)ClientBDriveNetwork management (Bootup protocol)Click on the “hil scher” button (enclosed in a red box above) to start the SyCon configuration tool. N.B. This button is not displayed if you have not installed SyCon on your PC.Adding the Altivar 31 EDS files to the CANopen devices managed by SyCon The EDS file that describes the Altivar 31 must be imported underClick on “OK” to return to the SyCon main window.The node device we selected appears at the selected position:Run the “Node…” command from the “Insert” menu (or click on thethe position where you want to add the Altivar 31, then left-These operations are summarised here:Disable the “Automatic COB-ID allocation in accordance with Profile 301” option by unchecking the associated checkbox; please note that this is only useful (and mandatory in this case!) if you intend to use one or both of the PDO 6 parameters.31 is the only slave on the CANopen bus and you do use the two PDOs of PDO 6 with their default mapping. If you configure other slaves on the same fieldbus, or if you alter the PDO configuration of the Altivar 31, the previously described input and output words allocation would be different. Should this happen, SyCon features a command that allows you to view the entire set of inputs and outputs: execute the “Address Table…” command of the “View” menu in order to do so.This chapter describes the various CANopen services of the drive, listed in accordance with their increasing COB-IDs.Any data whose length exceeds one byte is set LSB first and MSB last in a CANopen frame.Control of the NMT state machine (COB-ID = 16#000)Frame description Client C Drive(1)If Node-ID = 0, the “Command Specifier” is broadcasted to all CANopen slaves (Altivar 31 included); each one must then execute this NMT command, thus passing the corresponding transition (see below).Example: Transition to Pre-Operational state (Enter_Pre-Operational_State = 16#80) of the Altivar 31 located at CANopen address 4(16#04).COB-IDByte 0Byte 10(16#000)Command Specifier(CS)Node-ID (1)Command Specifier (CS)Meaning001 (16#01)Start_Remote_Node 002 (16#02)Stop_Remote_Node128 (16#80)Enter_Pre-Operational_State 129 (16#81)Reset_Node130 (16#82)Reset_Communication16#00016#8016#04Synchronisation object - SYNC (COB-ID = 16#080)Client C DriveThe SYNC object is cyclically emitted by the CANopen master.It does not include any data, hence limiting its frame to its sole COB-ID.The main purpose of this object is to allow to use the synchronous communication modes of the CANopen slaves. Thus, in the case of the Altivar 31, the PDO 6, if used, can be set on one of the possible synchronously cyclic or acyclic communication modes.Emergency Object - EMCY (COB-ID = 16#080 + Node-ID)Client B Drive An EMCY object is sent by the Altivar 31 to the other CANopen devices, with high priority, whenever an internal error appears (Byte 2 = 1)or disappears (Byte 2 = 0). An EMCY will never be repeated.The Emergency Error Code is the same as the variable "Fault code" (603F), refer to the user’s manual "Communication variables".COB-ID 128(16#080)COB-ID Byte 0Byte 1Byte 2Byte 3Byte 4Byte 5Byte 6Byte 7128(16#080)+Node-IDEmergency Error Code Error register 0LSBMSB=0 (no fault)=1 (fault)This set of PDO is compliant with the “drive and motion profile” of the DSP-402 specification.It is herein referred to as “PDO 1”.The default settings of the communication mode of PDO 1 must not be changed and its value (255) corresponds to the default communication mode of the drive profile: asynchronous , with the monitoring PDO being sent by the drive whenever the value of its data change.In addition, the object mapping of its frames cannot be changed, i.e. only the Control word "CMDD" and Status word "ETAD" can be exchanged between the Altivar 31 and a client. Both the first monitoring PDO and the first control PDO include only two bytes of data.Finally, the set of PDO 1 and the set of PDO 6 can be used at the same time but only to a certain extent and under special conditions (see the chapters describing these second PDOs).Monitoring PDO 1 (COB-ID = 16#180 + Node-ID)Client B DriveExample: The Altivar 31 located at CANopen address 4 (COB-ID = 16#180 + 4) is in the state "Operation Enabled" and has no fault (Status word "ETAD" = 16#xxx7). In the current example, Status word "ETAD" is equal to 16#0607.Control PDO 1 (COB-ID = 16#200 + Node-ID)Client C DriveExample: The Altivar 31 located at CANopen address 4 (COB-ID = 16#200 + 4) receives the command called “Enable operation” (Control word "CMDD" = 16#xxxF). In the current example, Control word "CMDD" is equal to 16#000F.COB-ID Byte 0Byte 1384(16#180)+Node-IDStatus word "ETAD"LSBMSB16#18416#0716#06COB-ID Byte 0Byte 151216#200+Node-IDControl word "CMDD"LSBMSB16#20416#0F16#0031323334Error control protocols (COB-ID = 16#700 + Node-ID)Bootup protocolClient B Drive Node guarding protocolDescriptionThe monitoring of the communication between the Client (the NMT master) and the Drive is either achieved using the Node Guarding protocol, described here, or with the Heartbeat protocol, described thereafter. Only one of these two protocols may be active at any given time!Client C DriveThe Client polls the drive and any other NMT slave at regular time intervals using “remote transmit requests.” Each NMT slave is assigned a specific time period for this poll, called “life time”. Its value may be changed via the two parameters “guard time” (16#100C: 16#00) and “life time factor” (16#100D: 16#00). The “life time” is given by the “guard time” multiplied by the “life time factor”.By default, the Node Guarding Protocol is inhibited on the Altivar 31 (the “guard time” and “life time factor” parameters are both set to 0).Client B Drive The response of the Drive contains its NMT state in the “NMT information” field, described here:Bit 7 = Toggle bit: the value of this bit must alternate between two consecutive responses from the Drive. The value of the toggle bit of the first response after the node guarding protocol becomes active is 0. It is only reset to 0 when a “Reset_Communication” command is passed to the Drive (see chapter Network management state chart (NMT State Machine), page 25). If a response is received with the same value of the toggle-bit as in the previous response, then the new response is handled as if it was not received.Bits 6-0 = NMT state: Current NMT state of the Altivar 31: Stopped (16#04), Operational (16#05), or Pre-Operational (16#7F).If the Drive does not transmit its response or if it transmits an incorrect state, the Client triggers a "Node Guarding" event.If, after its “life time” has elapsed, the Drive does not receive any polling:•it triggers a "Life Guarding" event,•goes to COF fault (CANopen communication fault),•and sends an emergency telegram (EMCY).COB-ID Byte 0This protocol is used to signal that the Drive has entered the node state Pre-Operational after the state Initialising.The only data byte sent in a bootup protocol frame is always equal to 16#00.1792(16#700)+Node-ID16#00COB-ID Byte 01792(16#700)+Node-IDNMT information353637General contents of the object dictionaryThe general breakdown of the Altivar 31 object dictionary is the same for all CANopen devices:Objects from the communication profile areaThis area contains the communication specific parameters for the CANopen network. All entries that appear here are common to ALL CANopen devices.Index Object 16#0000Unused16#0001 - 16#001F Static data types16#0020 - 16#003F Complex data types16#0040 - 16#005F Unused (Manufacturer specific complex data types)16#0060 - 16#007F Device profile specific static data types 16#0080 - 16#009F Device profile specific complex data types 16#00A0 - 16#0FFF Reserved for further use 16#1000 - 16#1FFF Communication profile area 16#2000 - 16#5FFF Altivar 31 specific profile area 16#6000 - 16#9FFF Standardised device profile area 16#A000 - 16#FFFFReserved for further useIndex Sub-index Access Type Default value Description 16#100016#00RO Unsigned 3216#00010192Device type:Bits 16-23 = Device type mode (1)Bits 00-15 = Device profile number (402)16#100116#00RO Unsigned 0816#00Error register: Error (1) or no error (0)16#100316#00RW Unsigned 0816#00Number of errors: No error (0) or one or more errors (>0) in object 16#1003; only the value 0 can be written 16#01RO Unsigned 3216#00000000Standard Error Field:Bits 16-31 = Additional information (all 0s)Bits 00-15 = Error code 16#100516#00RW Unsigned 3216#00000080COB-ID SYNC message:You should not modify this object value!16#100816#00RO Visible String “ATV31”Manufacturer device name16#100A 16#00RO Visible String “0301”Manufacturer software version: The value given here is only an example (V3.1)16#100B 16#00RO Unsigned 32(Node-ID)Node-ID: This object receives the value of the Node-ID configured for the Altivar 3116#100C 16#00RW Unsigned 1616#0000Guard Time: By default, the Node Guarding Protocol is inhibited; the unit of this object is 1 ms.16#100D 16#00RW Unsigned 0816#00Life Time Factor: Multiplier applied to the “Guard Time” in order to obtain a “Life Time”16#100E 16#00RW Unsigned 3216#00000700+ Node-ID Node Guarding Identifier: COB-ID used for the Node Guarding Protocol 16#100F 16#00RO Unsigned 3216#00000001Number of SDO supported16#101416#00RO Unsigned 3216#00000080+ Node-ID COB-ID Emergency message: COB-ID used for the EMCY service16#101616#00ROUnsigned 0816#01Consumer Heartbeat Time - Number of entries 16#01RW Unsigned 3216#00000000Consumer Heartbeat Time:Bits 16-23 = Node-ID of the producer Bits 00-15 = Heartbeat time (unit = 1 ms)N.B. Only one heartbeat producer can be configured here! By default, no producer is monitored.16#101716#00RW Unsigned 1616#0000Producer Heartbeat Time: The unit of this object is 1 ms. By default, the Altivar 31 sends no Heartbeat messages.16#101816#00RO Unsigned 816#01Identity object - Number of entries16#01ROUnsigned 3216#0000005FIdentity object - Vendor ID: This value is unique for each manufacturer.Index Sub-index Access Type Default value Description16#120016#00RO Unsigned 816#02Server SDO - Number of entries16#01RO Unsigned 3216#00000600+ Node-IDServer SDO - COB-ID Client Drive (receive) 16#02RO Unsigned 3216#00000580+ Node-IDServer SDO - COB-ID Client ⇦ Drive (transmit)16#140016#00RO Unsigned 816#02Receive PDO1 - Number of entries16#01RW Unsigned 3216#00000200+ Node-IDReceive PDO1 - COB-ID16#02RO Unsigned 816#FFReceive PDO1 - Transmission type:The onlyavailable mode for this PDO is “asynchronous” (PDOsent when its data value changes)16#140516#00RO Unsigned 816#02Receive PDO6 - Number of entries16#01RW Unsigned 3216#00000300+ Node-IDReceive PDO6 - COB-ID16#02RW Unsigned 816#FFReceive PDO6 - Transmission type: Three modesare available for this PDO: “asynchronous” (255),“synchronously cyclic” (1-240), and “synchronouslyacyclic” (0)16#160016#00RO Unsigned 816#01Receive PDO1 mapping - Number of mappedobjects16#01RO Unsigned 3216#60400010Receive PDO1 mapping - 1st mapped object: Controlword "CMDD" (16#6040)16#160516#00RW Unsigned 816#02Receive PDO6 mapping - Number of mappedobjects: 0 to 4 objects can be mapped for this PDO 16#01RW Unsigned 3216#60400010Receive PDO6 mapping - 1st mapped object: Controlword "CMDD" (16#6040)16#02RW Unsigned 3216#60420010Receive PDO6 mapping - 2nd mapped object: Velocityreference "LFRD" (16#6042)16#03RW Unsigned 3216#00000000Receive PDO6 mapping: No 3rd mapped object16#04RW Unsigned 3216#00000000Receive PDO6 mapping: No 4th mapped object16#180016#00RO Unsigned 816#05Transmit PDO1 - Number of entries16#01RW Unsigned 3216#00000180+ Node-IDTransmit PDO1 - COB-ID16#02RO Unsigned 816#FFTransmit PDO1 - Transmission type:The onlyavailable mode for this PDO is “asynchronous” (PDOsent when its data value changes)16#03RW Unsigned 1630Transmit PDO1 - Inhibit time:Minimum timebetween two transmissions; unit = 1 ms16#04RW Unsigned 8__Transmit PDO1 - Reserved16#05RW Unsigned 16100Transmit PDO1 - Event timer:In “asynchronous”mode, this object sets a minimum rate oftransmission for this PDO; unit = 1 ms16#180516#00RO Unsigned 816#05Transmit PDO6 - Number of entries16#01RW Unsigned 3216#00000280+ Node-IDTransmit PDO6 - COB-ID16#02RW Unsigned 816#FFTransmit PDO6 - Transmission type: Three modesare available for this PDO: “asynchronous” (255),“synchronously cyclic” (1-240), and “synchronouslyacyclic” (0)16#03RW Unsigned 1630Transmit PDO6 - Inhibit time:Minimum timebetween two transmissions; unit = 1 ms16#04RW Unsigned 8__Transmit PDO6 - Reserved16#05RW Unsigned 16100Transmit PDO6 - Event timer:In “asynchronous”mode, this object sets a minimum rate oftransmission for this PDO; unit = 1 ms3839Objects from the Altivar 31 specific profile areaThe parameters of this area are not described in the present user’s manual.Please refer to the user’s manual "Communication variables" of the Altivar 31 for a full description of these Altivar 31 specific parameters.Objects from the standardised device profile areaThe parameters of this area are not described in the present user’s manual.Please refer to the user’s manual "Communication variables" of the Altivar 31 for a full description of these parameters.Index Sub-index Access Type Default value Description16#1A0016#00RO Unsigned 816#01Transmit PDO1 mapping - Number of mapped objects16#01RO Unsigned 3216#60410010Transmit PDO1 mapping - 1st mapped object: Status word "ETAD" (16#6041)16#1A0516#00RW Unsigned 816#02Transmit PDO6 mapping - Number of mapped objects: 0 to 4 objects can be mapped for this PDO 16#01RW Unsigned 3216#60410010Transmit PDO6 mapping - 1st mapped object: Status word "ETAD" (16#6041)16#02RW Unsigned 3216#60440010Transmit PDO6 mapping - 2nd mapped object: velocity actual value "RFRD" (16#6044)16#03RW Unsigned 3216#00000000Receive PDO6 mapping: No 3rd mapped object 16#04RWUnsigned 3216#00000000Receive PDO6 mapping: No 4th mapped objectVVDED303093EN 2003-10atv31_CANopen_EN_V1。
施耐德ATV31H系列变频器编程手册
编程手册ATV 31H异步电机变频器内容警告 (2)起动变频器的步骤 (3)工厂配置 (5)基本功能 (6)初步安装建议 (8)显示器与按键的功能 (9)远程终端选项 (11)编程 (12)功能兼容性 (15)可分配给输入/输出的功能列表 (17)设置菜单 Set- (19)电机控制菜单 drC- (26)I/O 菜单 I-O- (32)控制菜单 CtL- (37)应用功能菜单 Fun- (53)故障菜单 FLt- (87)通信菜单 COM- (93)显示菜单 SUP - (95)维护 (100)故障 - 原因 - 解决方案 (101)配置/设置表 (104)参数代码索引 (111)功能索引 (112)注意:请参考“安装指南”。
1警告23起动变频器的步骤1 - 变频器交货•检查并确认变频器标签上型号与购货单对应的交货单上的型号一致。
•除去 ATV 31 的包装,检查变频器是否在运输过程中受到损坏。
2 - 检查并确认线电压与变频器的电源电压范围兼容(参见 ATV 31 安装手册)。
- 如果线电压不兼容,可能会损坏变频器。
3 - 安装变频器4 - 把下列设备连接到变频器上:•连接电源,并确保:- 与变频器电压范围兼容- 电源断开•连接电机,确保与进线电压匹配。
•连接控制设备 (通过逻辑输入控制)。
•连接速度给定设备 (通过逻辑或模拟输入给定)。
5 - 给变频器加电,但不给出运行命令6 - 配置下列参数:如果不是 50Hz 时的电机额定频率 (bFr)。
7 - 在 drC- 菜单配置下列参数:如果变频器的工厂设置不合适时的电机参数。
8 - 在 I-O-, CtL- 与 FUn- 菜单配置下列参数:应用功能 (如果变频器的工厂设置不合适),例如控制模式: 3 线或 2 线转换检测,或 2 线等级检测,或正向优先的 2 线检测,或 ATV31ppp A 本机控制。
用户必须保证编程设定的功能与所用的接线图兼容。
施耐德ATVAR31简易操作说明书
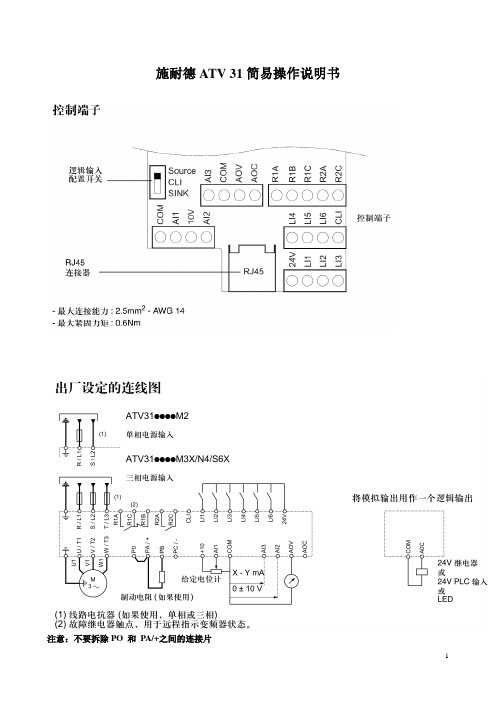
施耐德ATV 31简易操作说明书注意:不要拆除PO 和PA/+之间的连接片与三菱PLC 连接实例一、有级调速,7段1、将逻辑输入端子配置开关打到SOURCE 位置2、将电源的R 、S 两端接220V 交流电源,T 端不接3、按照下图连接PLC 与变频器 变频器ATVAR31三菱FX2NPLCLI1LI2LI3LI424V Y5Y1Y2Y3COM Y4Y6Y7LI5LI6LI7Y1:正转控制端(注意和Y2,Y6不要同时输出,下同)Y2:反转控制端Y6:停止控制端LI5 LI4 LI3 速度值(在SET 菜单中设置)0 0 0 SP10 0 1 SP20 1 0 SP30 1 1 SP41 0 0 SP51 0 1 SP61 1 0 SP71 1 1 SP84、按照以下步骤设置各段频率,注意:每设置一个参数后,按一下ENTER键两秒以上才能设置成功(1)通电后,进入SET按键,,设置最大速度值为50HZ;(2)在SET中设置以下七个值作为七段预置速度:不要超过50HZ,默认值分别为10,15,20,25,30,35,40(3)进入输入输出菜单I-O:设置,为2C(2 线控制)模式;设置为LI2,选定该逻辑输入作为反转控制(4)进入功能菜单FUn设置,,设置为LI6设置,为LI5,即LI5,LI4,LI3不同组合控制速度输出与西门子PLC 模拟模块连接实例一、有级调速1、将模拟量输入端子配置开关打到SOURCE 位置2、将电源的R 、S 两端接220V 交流电源,T 端不接3、按照下图连接PLC 与变频器 变频器ATVAR31西门子PLC224XP CNLI1AI124V Q0.0COM V MCOMQ0.0:正转控制端V :模拟电压输出正极M :模拟电压输出负极根据模拟输出电压的大小来调节变频器的频率(如果没有转动,可以扩大PLC 模拟电压输出信号)4、按照以下步骤设置频率,注意:每设置一个参数后,按一下ENTER 键两秒以上才能设置成功(1)通电后,进入电机控制菜单drc 中设置,为(变频器复位)模式;(2)进入输入输出菜单I-O :设置,为2C(2 线控制)模式;设置为LI2,选定该逻辑输入作为反转控制(3)进入故障菜单FLT:设置,为(电机缺相不检测)模式;(4)进入显示菜单SUP:设置为(显示为电动机的频率)模式;(5)进入输入输出菜单I-O:设置,为(模拟输出为0-20mA)模式;(6)进入输入输出菜单I-O:设置,为(模拟输出为电机频率)模式;(7)进入控制菜单:设置,为(配置给定1为模拟输入AI1)模式;(8)进入配置/设置菜单drc;设置,为50Hz(最大输出频率为50Hz);(9)按下启动RUN设置完成。
ATV施耐德变频器参数设置简易
A T V312施耐德变频器参数设置MODE---模式切换ESC---退出键盘中间---进入/确认RUN---运行STOPRESET---停止/复位注:全新变频器默认运程模式(左边3个灯循环闪烁,此模式不可设参数),按MODE键3秒至灯不闪烁,进入本地模式才可以设置参数。
每次按键盘中间进入或者确认,按ESC退出,旋转键盘可选择参数。
必设参数:1、电机参数(根据电机铭牌设置)drC---nCr(电机额定电流)bFr(电机标准频率)nSP(电机额定转速)UnS(电机额定电压)2、SEt---ItH电机热电流(按电机额定电流1.2倍设置)HSP上限频率(默认50HZ,电机是60HZ的要设置60HZ)3、FLt---rsf---LI5故障复位点一、面板操作1、CtL---LAC---L3(按键盘中间2秒确定)CHCF--SEPCdI---LOC(本地)FrI---AIUIrOt--dFr电机正转(drs,电机反正)2、rEF---AIUI运行频率(100对应HSP设置频率,50/60HZ)进到该参数里面,再旋转键盘可调频率。
二、端子控制1、CtL---LAC---L3(按键盘中间2秒确定)CHCF--SEPCdI---tEr(端子控制)FrI---AIUI2、rEF---AIUI运行频率(100对应HSP设置频率,50/60HZ)三、压力传感器控制4-20mA(AI3端子控制)1、CtL---LAC---L3(按键盘中间2秒确定)CHCF--SECdI---tEr(端子控制)FrI---AI3(给定通道)2、I-O----CrL3控制最小值9.2(计算公式:16÷40x压力+4,40是传感器量程)CrH3控制最大值11.2(9.2-11.2对应13-18MPa,稳定在15,16MPa)AOIt--4A(传感器接线:上面有1,2,3,4角,1角是电源线,2角是信号线)四、恢复出厂设置DrC---FCS---InI(按键盘中间2秒,切换到no)。
施耐德变频器调试步骤(图文并茂)

施耐德变频器调试步骤第一步型号确认:确认变频器的型号与所购买的变频器的型号是否一致。
如不一致,让代理商退货。
第二步运输确认:打开包装后,检查变频器在运输过程中有无损坏。
如有损坏,让代理商退货。
第三步电压确认:现场的电源电压应在变频器所接受的电压范围内。
否则,下面的所有步骤停止。
第四步机械安装第五步电机、变频器的绝缘测量。
然后给变频器连线:按照图纸,连接电机线到T1,T2,T3上,确保连接与电压一致;在确保电源关闭之后连接主电源到R,S,T ;连接控制源;连接速度给定源。
有网络的连接网络。
第六步上电调试语言修改:上电后会显示语言选择。
(仅上电第一次要做此修改WORLD!岂仅有一个选项可快选样时・此选WZ表屁示例:只有一种1S盲可以选择n 第七步恢复出厂设置曲命二RUti _ 1:;CA tXO$11电气维修人员一般把此访问等级设为专家权限。
第九步设定电机参数:电机的功率、电压、电流、频率、转速等,并作自整定第十步设加减速时间:设置合理的加减速时间。
第十一步设保护参数电机的热保护电流值;电流限幅值等。
WORLD在斷鵬船车胴鹤螂鈿1儒rai 口[电删护輸]0.2 ¥15 In m第十二步设控制源、频率源:在1.6命令中设启动变频器的通道,频率给定的通道。
设置最咼频率、最低频率等。
第十三步有应用功能的分配应用功能。
如制动逻辑控制。
第十四步确定电机的转向给定以较小的频率,点动变频器,确认电机的转向;如相反可修改1.4中参数PHr。
第十五步记录几个频率段的电流值频率20Hz 25Hz 30Hz 35Hz 40Hz 45Hz 50Hz 无载电流(A 有载电流(A第十六步:关键参数设置纪录。
SCHNEIDER ATV 31 系列精巧型变频器 说明书

ATV 31 系列精巧型变频器天赋异禀,性能卓越产品目录Ą Ą Ą ƽ只需轻松点击,您就可以通过本网站访问TE电器旗下所有产品的各种介绍资料,这些资料包括:b文档资料:数据文档,产品样本,证书,产品常见问题解答,宣传手册b电子样本中的选型指南b产品查询网页及相关动画文件网站还为您提供了配图说明、可订阅的新闻服务、论坛、不同国家的联系方式...每天都为您呈现最新的自动化解决方案!灵活b模块化、可互换的功能,轻松满足您不断变化的需求b所有产品系列共享软件和附件精巧b体积小,功能齐全b随处安装,方便简单智能b即插即用b集成的应用功能、监控、通讯和诊断b提供控制面板或远程用户友好操作开放b与现场总线、连接系统和软件标准兼容b借助“透明就绪”产品,通过互联网进行远程监控简易b从一系列优化、经济高效的产品中简单地选择,就可满足标准需求b无论是电工还是自控专家,所有用户都能轻松掌握b轻松输入数据,直观简易的编程异步电动机变频器异步电动机变频器ATV 31目录页号介绍2特性10型号14外形尺寸18组合方案24安装25选件制动电阻28线路电抗器30EMC 输入滤波器32输出滤波器和电机电抗器34电机起动器 (用户组装)36功能40通讯56117 23ATV 31 是用于三相鼠笼式异步电机的变频器。
ATV 31 可靠性高,结构紧凑,便于使用,并且符合 EN 50178, IEC/EN 61800-2, IEC/EN 61800-3 标准,拥有 UL/CSA 认证和 e 标志。
它集成了适用于大多数常见应用的功能,包括:b 物料搬运 (小型输送机、升降机等)b 填料和包装机b 专用机械 (混合机、搅拌机、纺织机械等)b 泵、压缩机、风机等。
ATV 31 变频器以 Modbus 和 CANopen 工业总线进行通讯。
这些协议作为标准集成在变频器中。
ATV 31 变频器配备有用于正常环境和通风机箱的散热器。
多个单元可并排安装在3 上以节省空间。
施耐德变频器调试步骤
施耐德变频器调试步骤1.确认电源和电机连接:首先,检查变频器的电源和电机的连接,确保接线正确、牢固。
同时,也需要确认电源电压和变频器额定电压一致。
2. 设置运行参数:将变频器接通电源后,使用编程器(如施耐德的SoMove软件)连接到变频器,设置运行参数。
包括选择运行模式(如速度控制模式或转矩控制模式)、设定目标转速或转矩、设置保护参数等。
3.调节电机参数:根据电机的额定参数和实际情况,设置变频器的电机参数。
主要包括电机额定功率、额定电流、电机类型(如异步电机或同步电机)、电机的极数等。
4.运行参数检查:确认所有运行参数设置正确后,可以通过编程器对变频器进行自动测试,检查运行参数和控制效果。
可以调节变频器的加速时间、减速时间等参数,观察变频器的响应。
5.检查保护功能:调试完成后,需要测试变频器的保护功能。
在正常运行时,可以模拟异常情况(如过流、过压等),观察变频器是否能够及时切断电源,保护电机和设备的安全。
6.故障诊断:如果调试中出现故障或异常情况,需要进行故障诊断。
可以通过编程器上的故障代码和故障诊断工具来定位故障原因,并进行修复。
常见的故障包括过载、短路、过热等。
7.驱动系统优化:调试完成后,可以进行驱动系统的优化。
根据实际情况,调整变频器的参数,使驱动系统更加高效、稳定。
可以调整变频器的响应速度、反馈控制方式等参数,以提高控制精度。
8.运行监测和维护:设备投入使用后,需要定期进行运行监测和维护。
可以通过变频器上的运行数据和报警记录,了解设备的运行状态,及时发现和处理故障。
同时,也需要进行定期的清洁和润滑工作,确保变频器和电机的正常运行。
以上是施耐德变频器调试的主要步骤,通过正确的调试和维护,可以确保变频器和电机的正常运行,提高设备的可靠性和效率。
需要注意的是,在调试过程中,要遵循安全操作规程,避免电击和其他事故的发生。
同时,也建议参考施耐德的操作手册和技术支持文档,以获取更详细和准确的调试步骤和方法。
施耐德变频器参数设置ATV31H
施耐德ATV31H变频器调试总结各个按键释义:ENT键---进入菜单或参数以及参数存储;ESC---退出菜单或参数以及清除显示值;RUN键---运行;STOP RESET---停止/复位;增加---返回以前菜单或参数以及增大显示值;减少---进入下一菜单或参数以及减少显示值。
变频器共包括如下子菜单:bFr-[电机频率]、SET-[设置]、drC-[电机控制]、I-O-[输入输出配置]、CtL-[命令]、FUN-[应用功能]、FLt-[故障管理]、CON-[通讯]、SUP-[监控]。
bFr菜单只在变频器加电时才能看到。
注意:在进行参数设置前,需要搞清变频器所驱动电机的额定电压、电流、功率、转速等基本参数。
一般来说,对下列参数进行快速设置后变频器即可应用:1、基本设置SetItH电机热电流(按电机额定电流1.2倍设置)HSP上限频率(默认50HZ,电机是60HZ的要设置60HZ)2、电机参数(根据电机铭牌设置)drCbFr(电机标准频率)UnS(电机额定电压)Frs(电机额定频率)nCr(电机额定电流)nSP(电机额定转速)cos(功率因数,非必要)tFr(最大输出频率,默认值为60)Uft(负载类型,L:恒定转矩、P:可变转矩,如泵或风机、n:恒定磁通矢量控制、nLd:节能)。
3、输入输出配置I-OtCC控制类型(2C:2线控制、3C:3线控制、LOC:本地控制)tCt2线制控制类型(LEL:0和1状态用于运行和停车、trn:控制时需要边沿检测、PFO:正向优先于反向)CrL3. CrH3(对应LSP和HSP对应AI3输入的值,分别默认为4mA和20mA)AOIt输出信号方式配置(0A:0-20mA、4A:4-20mA、 I0V:0-10V)dO输出信号类型配置(nO:未分配、Ocr:电机电流、Ofr:电机频率、Otr:电机转矩、Opr:变频器功率)r1继电器r1信号分配(nO:未分配、FLt:变频器故障、rUn:变频器运行,其余选项略)、r2继电器r2信号分配(nO:未分配、FLt:变频器故障、rUn:变频器运行,其余选项略)4、命令CtLLAC功能访问等级(L1/L2/L3等级递增)Fr1配置给定1(AI1:通过AI1给定、AI2:通过AI2给定、AI3:通过AI3给定、AIP:通过电位计给定,其余参数略)Fr2配置给定2(AI1:通过AI1给定、AI2:通过AI2给定、AI3:通过AI3给定、AIP:通过电位计给定,其余参数略)变频器故障代码OCF---过流;OHF---变频器过热;OLF---电机过载;OPF---电机缺相;SOF---电机超速;SCF---电机短路(相、地);OSF---电源过压;PHF---电源缺相;USF---线路电源欠压。
ATV31变频器控制设定
Altivar31变频器控制设定一.首要检查设定1.恢复出厂值在I-O. FUN. drC. CtL等控制菜单下用▲▼选择FCS---In1即可恢复出厂默认值(每个菜单下都有各自的恢复默认值功能选项)如:I-O---FCS---In12.电机参数设置drC电机控制菜单bFr----标准电机频率50HZ (可调)Uns----电机额定电压可调nCr----电机额定电流可调nSP----电机额定转速可调*注:详见Altivar31 编程手册26-27页3.关闭变频器对负载电机连接情况自检功能当变频器运行或对电机进行自整定操作时,会自动检测负载连接状态,如果出错会出现以下报警(针对本实验,主要是负载风扇功率过小,出现电机缺相问题):tnF(电机自整定失效)------ 负载为特殊电机或电机功率不配套OPF(电机缺相)----- 电机缺相或电机功率太小如试用则可将其关闭,操作步骤:FLt------OPL------nO 即可关闭*注:详见Altivar31 编程手册89页4.设定和解除密码在SUP显示菜单下操作(如有密码锁定时,访问者只能进入SUP菜单)(1)设定密码选择SUP------Cod--------**** *号代表要设定的密码数(4位)用面板上▲.▼键增减值(2—9999),选定后按ENT 键,屏幕出现On 即已设定完.(2)解除访问设定用面板上▲键输入密码,选定后按ENT 键,密码保留在屏幕上,表示本次访问允许.直到下次断电访问.如输入密码错误,则显示On (通用密码6969). 为使相同密码重新激活锁定,可使用▼键选择On ,按ENT 键,屏幕显示On 表示已重新锁定(3)清除密码先输入密码解除锁定(第二步), 可使用▲键选择OFF ,按ENT 键,屏幕显示OFF 表示已清除*注:详见Altivar31 编程手册98页二.2线/3线控制及I-O---输入输出控制设置菜单1.I-O------FCS-----恢复默认值(建议首先恢复)2.进入I-O------tcc tcc=2c 两线控制tcc=3c 三线控制两线控制时: LI1----正传LI2----反转(LI1默认反转端子可设定)三线控制时:LI1----停止LI2----正转LI3----反转(LI1.LI2默认反转端子可设定)3.反向运行控制如果选择2线/3线控制则反向运行逻辑输入端为LI2/LI3 此控制端可在I-O----rrs-----LI* 中更改.如果选择I-O----rrs-----nO 则反向运行逻辑输入关闭4.模拟输入/输出设定Ctl控制菜单模拟输入AI*Ctl------Fr1-------AI1 模拟电压输入AI1 0---+10VAI2 模拟电压输入AI2 0---+/-10VAI3 模拟电流输入AI3 0---20mA模拟/逻辑输出AOC/AOVI-O----dO---------OCr 20mA/10V 对应两倍变频器额定电流OPr 20mA/10V 对应两倍变频器额定功率Otr 20mA/10V 对应两倍电机额定转矩Ofr 20mA/10V 对应最大输出频率输出形式设定I-O----AOIt-------0A 0---20mA(使用端AOC)4A 4---20mA(使用端AOC)10U 0---10V (使用端AOV)R1.R2继电器输出设定R1有常开/常闭触点R2只有常开触点操作I-O------r1/r2------FLt 变频器故障rUn 变频器运行FtA 达到频率阀值Ftd(频率设定的上限)CtA 达到频率阀值Ftd(频率设定的上限)SrA 达到频率给定值FLA 达到高速*注:详见Altivar31 编程手册I_O—-32-36页Ctl---46、47页三.多段速设定FUN----功能菜单1.FUN-----PSS PSS=PS2 2段速PSS=PS4 4段速PSS=PS8 8段速PSS=PS16 16段速当选定PS2时,须将PS4. PS8.PS16设为nO当选定PS4时,须将PS8.PS16设为nO当选定PS8时,须将PS16设为nO当选定PS2时,进入PS2,选择IL3确认,PS2=IL3当选定PS4时,进入PS4,选择IL4确认,PS8=IL4当选定PS8时,进入PS8,选择IL4确认,PS8=IL4*当选定PS16时,进入PS16,选择IL4确认,PS16=IL4同理,速度模式由以上推之可得*注:以上选定在两线控制模式下.且SP*的预置速度可设定详见Altivar31 编程手册63-65页四.预置速度设定SET----设置菜单1.SET-----SP* *号为2---16数字选定一个速度如SP2 10HZ(默认)可修改大小(0---500HZ)2.当设定完两线/三线控制.多段速后,即可修改SP*的预置值*注:详见Altivar31 编程手册23页五、用外部按钮控制加/减速端子设定速度*注:详见Altivar31 编程手册页Ctl---46-50页FUN---61、63、69页根据操作手册提示:此功能与欲置多段速度和给定速度求和功能矛盾,不能同时使用;并且前提条件是:要在当参数LAC选择L2或L3下,才能访问设定参数子键,并设定该参数(UPD)。
施耐德ATV31变频器调试指南.
ATV31 调试指南本调试指南分为两部分内容:一 . 在生产过程中曾经出现的一些问题, 提请大家注意;二 . 将我们在调试过程中积累的经验总结出来,以助大家更深层次地理解ATV31的多种功能,更大程度地发掘它的优异性能。
一、曾经出现、正在改进的问题:1. 密码保护:版本为 V1.1IE01的 ATV31存在这样一个问题:在 CODE 中设置密码后, 仍然可以看到 SET 菜单并能修改参数。
最新版本的 V1.2IE03已经解决了这个问题,设置密码后只能看到 SUP 菜单。
2. 编程手册部分内容的更正:(1编程手册第 30页:SSL (速度环滤波器的抑制应改为 SrF ;(2编程手册第 34页:DO 参数中的 rFr (电机频率应改为 Ofr ; 以上内容我们将在新出版的编程手册中进行更正。
另外为方便客户使用,最新出版的资料将编程手册与安装手册合二为一,安装手册放在编程手册之后。
二、调试经验汇总:1. 逻辑输入端子的多任务性:(1 ATV31 与 ATV28一个很大的区别在于逻辑输入端子的多任务性 . ATV28的每个逻辑输入端子只能选择一个功能;而 ATV31是由功能选择端子,同一个逻辑输入口可以被赋与多个功能,但要注意这些功能之间的兼容性(见编程手册第 15页的功能兼容表。
如果两功能彼此不兼容,先设置的功能就会阻止另一个功能的设置。
(2在将需要的功能赋与一个逻辑输入端子之前,应先将该端子原有的功能改为nO 。
例如:当控制类型选择为 2线控制时, FUN 菜单下的 PS2(2种预置速度功能就被分配给 LI3端子了。
如果需要将 LI3端子定义为其它功能(如自由停车,应先将PS2设置为 nO ,再将需要的功能赋与 LI3。
2. 给定输入:ATV31出厂默认频率给定为 SA1=Fr1+SA2+SA3,且 SA2的工厂设置为 AI2。
如果只需要 Fr1一个信号作为给定,应将 FUN 菜单下的 SA2的设置改为 nO ,以免Fr1和 SA2信号叠加造成误动作(SA3工厂设置值即为 nO ,可以不做更改。
施耐德变频器参数设置教程
施耐德变频器参数设置教程1. 引言变频器是一种电力调节设备,通过调节电源频率来控制电机转速。
施耐德变频器作为一种常用的变频器品牌,由于其稳定性和易用性而受到广泛应用。
本文将介绍施耐德变频器的参数设置方法,帮助用户正确配置变频器以实现所需的功能。
2. 变频器参数设置步骤请按照以下步骤进行施耐德变频器参数设置:步骤1:进入菜单界面将变频器接通电源,并确保电源正常。
然后按下变频器面板上的“菜单”按钮进入菜单界面。
步骤2:选择基本参数设置在菜单界面中,使用上下方向键选择“基本参数设置”选项,然后按下“确认”按钮进入基本参数设置界面。
步骤3:配置电机参数在基本参数设置界面中,使用方向键选择“电机参数设置”选项,然后按下“确认”按钮进入电机参数设置界面。
步骤4:设置电机额定功率和额定电流在电机参数设置界面中,使用方向键选择“额定功率”选项,然后按下“编辑”按钮开始设置电机的额定功率。
根据实际情况选择合适的功率数值,并按下“确认”按钮进行确认。
同样的步骤设置电机的额定电流。
步骤5:配置速度控制参数在基本参数设置界面中,使用方向键选择“速度控制参数”选项,然后按下“确认”按钮进入速度控制参数设置界面。
步骤6:设置运行频率和最大频率在速度控制参数设置界面中,使用方向键选择“运行频率”选项,然后按下“编辑”按钮开始设置变频器的运行频率。
根据需要选择适当的频率数值,并按下“确认”按钮进行确认。
同样的步骤设置变频器的最大频率。
步骤7:配置其他参数根据实际需求,可以在基本参数设置界面中配置其他参数,例如过载保护、过压保护等。
选择相应的选项并进行设置。
步骤8:保存参数设置完成所有参数设置后,返回到基本参数设置界面,并选择“保存参数设置”选项,按下“确认”按钮保存设置。
3. 参数设置注意事项在进行施耐德变频器参数设置时,需要注意以下事项:•确保变频器和电机的额定参数正确配置,以保证系统稳定运行。
•注意审慎设置变频器的运行频率和最大频率,过高的频率可能导致电机过载或损坏。
施耐德ATV31变频器说明书-1[doc.xuehai.net]
![施耐德ATV31变频器说明书-1[doc.xuehai.net]](https://img.taocdn.com/s3/m/e5048209a200a6c30c22590102020740be1ecdd3.png)
施耐德ATV31变频器说明书本文档下载自文档下载网,内容可能不完整,您可以复制以下网址继续阅读或下载:/b685fb71f8790e09492570709.htmlATV 31H异步电机变频器安装手册编程手册目录变频器型号____________________________________________________________________________ 2安装________________________________________________________________________________ _ 6连线________________________________________________________________________________ _13制动电阻_____________________________________________________________________________24注意:另请参考编程手册。
1变频器型号单相电源电压: 200...240 V 50/60 Hz3 相电机 200...240 V电机铭牌上指示的功率 (1)kW/HP0.18/0.250.37/0.50.55/0.750.75/11.1/1.51.5/22.2/3ATV 31变频器 (输出)最高瞬时额定负载型号预期最大视在功率最大启动额定最大线电流 (2)电流下的耗散 (5)线电流 Isc电流 (3)电流 In200 V 时240 V 时(1)(1) (4)功率电源输入(输入)A3.05.36.88.912.115.821.9A2.54.45.87.510.213.318.4kA1111111kVA0.61.01.41.82.43.24.4A10101010191919A1.53.33.74.8/4.2(6)6.98.011.0A2.35.05.67.210.412.016.5W244146607490123ATV31H018M2ATV31Hhttp://do/b685fb71f8790e09492570709.html037M2ATV31H055M2ATV31H075M2ATV31HU11M 2ATV31HU15M2ATV31HU22M23 相电源电压: 200...240 V 50/60 Hz3 相电机 200...240 V电机铭牌上指示的功率 (1)kW/HP0.18/0.250.37/0.50.55/0.750.75/11.1/1.51.5/22.2/33/44/55.5/7.57.5/1011/1515/20ATV 31变频器 (输出)预期最大视在功率最大启动额定电流最高瞬时额定负载型号最大线电流 (2)线电流 Isc电流 (3)In (1)电流下的耗散 (5)200 V 时240 V 时(1)(4)功率电源输入(输入)A2.13.84.96.48.511.114.919.124.236.846.863.582.1A1.93.34.25.67.49.613.016.621 .13240.955.671.9kA55555555522222222kVA0.71.31.72.23.03.85.26.68.412.816.222.028. 5A10101010101010191923239393A1.53.33.74.86.98.011.013.717.527.533.054.066.0A2.35 .05.67.210.412.016.520.626.341.349.581.099.0W233843557186114146180292388477628AT V31H018M3XATV31H037M3XATV31H055M3XATV31H075M3XATV31HU11M3XATV31HU15M3XATV31HU22M 3XATV31HU30M3XATV31HU40M3XATV31HU55M3XATV31HU75M3XATV31HD11M3XATV31http://doc.xu /b685fb71f8790e09492570709.htmlHD15M3X2变频器型号(1)这些功率额定值和电流值是在最高环境温度50°C、开关频率为 4kHz 的连续运行条件下的值。
施耐德变频器atv 设置方式
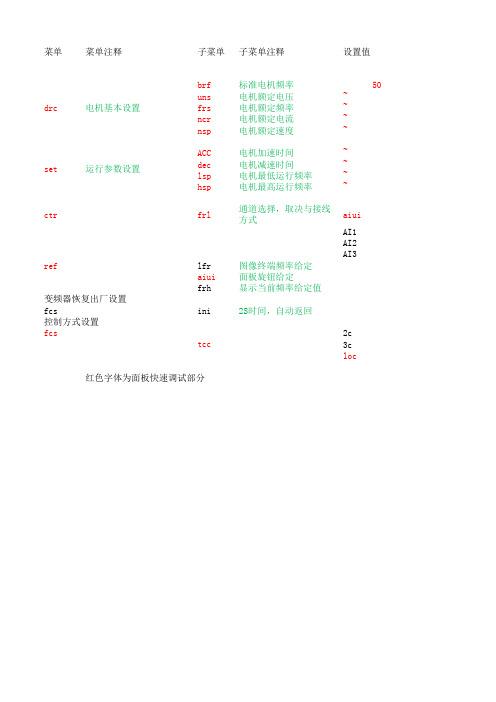
菜单菜单注释子菜单子菜单注释设置值
brf 标准电机频率50
uns 电机额定电压~frs 电机额定频率~ncr 电机额定电流~nsp 电机额定速度~ACC 电机加速时间~dec 电机减速时间
~lsp 电机最低运行频率~hsp 电机最高运行频率~ctr
frl
通道选择,取决与接线方式
aiui AI1AI2AI3
ref
lfr 图像终端频率给定aiui 面板旋钮给定
frh 显示当前频率给定值fcs
ini
2S时间,自动返回
fcs
2c 3c loc
控制方式设置红色字体为面板快速调试部分
tcc
drc 电机基本设置
set 运行参数设置
变频器恢复出厂设置
设置注释
电网频率
详见电机铭牌
详见电机铭牌
详见电机铭牌
详见电机铭牌
0~30
0~30
0~60
0~60
激活面板控制设置模拟量输入1
模拟量输入2
模拟量输入3
2线控制
3线控制
本地(面板)控制。
ATV31-施耐德变频器培训手册
1 – 规格 驱动器电流
额定驱动器电流
• 大于等于IEC/NEMA标准规定的相应电机的额定电流
驱动器过载电流
• 150% 额定电流, 60 s • 过载电流的倍数,在一定程度上决定了可获得的力矩过载能力
过渡过程电流
• 典型值 180% , 2 s
Drive currents ATV31.H 200-240V
1.5 kW 2 HP "K2" "K2"
2.2 kW 3 HP "K3" "K3"
3 kW "K3"
4 kW 5.5 kW 7.5 kW 11 kW 15 kW 5 HP 7.5 HP 10 HP 15 HP 20 HP
"K3" "K4" "K4" "K5" "K5"
ATV 31 比ATV28小,平均体积减少25% 提供用于替换ATV28的机械安装器件
T7 T7
4 kW 5.5 kW 7.5 kW 11 kW 15 kW 5 HP 7.5 HP 10 HP 15 HP 20 HP
T7
T8
T8
T9
T9
T7
T8
T8
T9
T9
T7
T8
T8
T9
T9
3 sizes 成套装置 product 1 Ph - 240 V 3 Ph - 500 V
C 0.18 kW 0.37 kW 0.55 kW 0.75 kW 1.1 kW 1.5 kW 2.2 kW 1/4 HP 1/2 HP 3/4 HP 1 HP 1.5 HP 2 HP 3 HP "C1" "C1" "C1" "C1" "C2" "C2" "C3" "C2" "C2" "C2" "C2" "C2" "C3"
施耐德ATV变频器设置指引
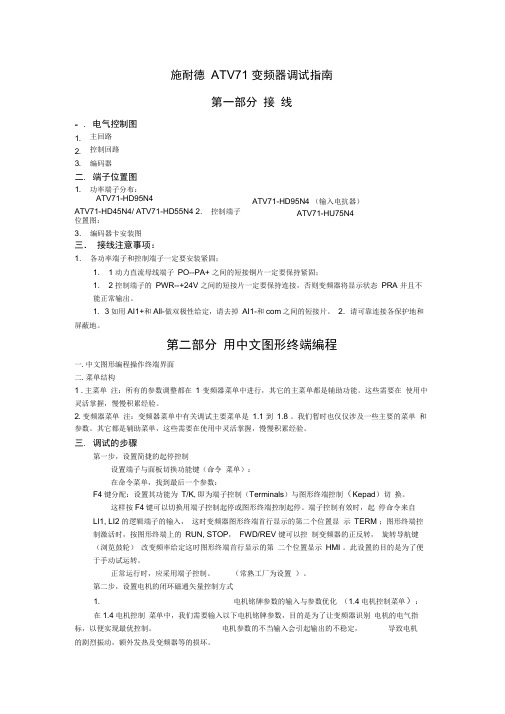
施耐德 ATV71 变频器调试指南第一部分 接 线一. 电气控制图1. 主回路2. 控制回路3. 编码器二 . 端子位置图1. 功率端子分布:ATV71-HD95N4ATV71-HD45N4/ ATV71-HD55N4 2. 控制端子位置图:3. 编码器卡安装图三. 接线注意事项:1. 各功率端子和控制端子一定要安装紧固;1. 1 动力直流母线端子 PO--PA+ 之间的短接铜片一定要保持紧固;1. 2 控制端子的 PWR--+24V 之间的短接片一定要保持连接,否则变频器将显示状态 PRA 并且不能正常输出。
1. 3如用AI1+和All-做双极性给定,请去掉 AI1-和com 之间的短接片。
2.请可靠连接各保护地和屏蔽地。
第二部分 用中文图形终端编程一.中文图形编程操作终端界面 二.菜单结构1 .主菜单 注:所有的参数调整都在 1 变频器菜单中进行,其它的主菜单都是辅助功能。
这些需要在 使用中灵活掌握,慢慢积累经验。
2.变频器菜单 注:变频器菜单中有关调试主要菜单是 1.1 到 1.8 。
我们暂时也仅仅涉及一些主要的菜单 和参数。
其它都是辅助菜单,这些需要在使用中灵活掌握,慢慢积累经验。
三. 调试的步骤第一步,设置简捷的起停控制设置端子与面板切换功能键(命令 菜单): 在命令菜单,找到最后一个参数:F4键分配:设置其功能为 T/K ,即为端子控制(Terminals )与图形终端控制(Kepad )切 换。
这样按F4键可以切换用端子控制起停或图形终端控制起停。
端子控制有效时,起 停命令来自LI1, LI2 的逻辑端子的输入, 这时变频器图形终端首行显示的第二个位置显 示 TERM ;图形终端控制激活时,按图形终端上的 RUN, STOP , FWD/REV 键可以控 制变频器的正反转, 旋转导航键 (浏览鼓轮) 改变频率给定这时图形终端首行显示的第 二个位置显示 HMI 。
此设置的目的是为了便于手动试运转。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
ATV31 调试指南
本调试指南分为两部分内容:一 . 在生产过程中曾经出现的一些问题, 提请大家注意;二 . 将我们在调试过程中积累的经验总结出来,以助大家更深层次地理解ATV31的多种功能,更大程度地发掘它的优异性能。
一、曾经出现、正在改进的问题:
1. 密码保护:
版本为 V1.1IE01的 ATV31存在这样一个问题:在 CODE 中设置密码后, 仍然可以看到 SET 菜单并能修改参数。
最新版本的 V1.2IE03已经解决了这个问题,设置密码后只能看到 SUP 菜单。
2. 编程手册部分内容的更正:
(1编程手册第 30页:SSL (速度环滤波器的抑制应改为 SrF ;
(2编程手册第 34页:DO 参数中的 rFr (电机频率应改为 Ofr ; 以上内容我们将在新出版的编程手册中进行更正。
另外为方便客户使用,最新出版的资料将编程手册与安装手册合二为一,安装手册放在编程手册之后。
二、调试经验汇总:
1. 逻辑输入端子的多任务性:
(1 ATV31 与 ATV28一个很大的区别在于逻辑输入端子的多任务性 . ATV28的每个逻辑输入端子只能选择一个功能;而 ATV31是由功能选择端子,同一个逻辑输入口可以被赋与多个功能,但要注意这些功能之间的兼容性(见编程手册第 15页的功能兼容表。
如果两功能彼此不兼容,先设置的功能就会阻止另一个功能的设置。
(2在将需要的功能赋与一个逻辑输入端子之前,应先将该端子原有的功能改为nO 。
例如:当控制类型选择为 2线控制时, FUN 菜单下的 PS2(2种预置速度功能就
被分配给 LI3端子了。
如果需要将 LI3端子定义为其它功能(如自由停车,应先将PS2设置为 nO ,再将需要的功能赋与 LI3。
2. 给定输入:
ATV31出厂默认频率给定为 SA1=Fr1+SA2+SA3,且 SA2的工厂设置为 AI2。
如果只需要 Fr1一个信号作为给定,应将 FUN 菜单下的 SA2的设置改为 nO ,以免Fr1和 SA2信号叠加造成误动作(SA3工厂设置值即为 nO ,可以不做更改。
3. PI 调节器的设置:
如果需要将 Fun(功能菜单中的 PI 功能中设置 PIF 的选项 (出厂设置为 nO , 可有 AI1,AI2,AI3三种选择 ,应先将出厂设置中赋给 LI3,LI4,SA2的端子都改为 nO ,即:把 SA2设置由 AI2改为 nO (见编程手册第 61页,把 PS2设置由 LI3改为 nO (见编
程手册第 63页,将 PS4设置由 LI4改为 nO (见编程手册第 63页,然后才能在 PIF 中看到 AI1,AI2,AI3。
4. 手册上画黑框的参数的显示:
有些参数只有在定义了相应的功能后才能在菜单中看到。
例如:FUN 菜单中的参数 DCF (快速停车时划分减速斜坡时间的系数,只有当 FST (通过逻辑输入进行快速停车定义为一个逻辑输入端子后才会出现。
5. 转速显示:
ATV28的参数 SPd 直接显示转速;而 ATV31的转速显示和 SET 菜单下的 SdS 参数有关,是从频率显示折算过来的。
频率的显示精度是 0.1Hz ,所以转速显示的最小变化值对于 4极电机是 3转,对于 6极电机是 6转。
6. 频率环的优化:
ATV28的矢量控制算法是接近于 V/F控制的简单失量控制,而 ATV31是真正的矢量控制,在以下多种性能上都优于 ATV28,如低频时转矩输出、低频时电流的
稳定性、动态跟随性能等等。
但 ATV31更依赖于数学模型的建立,对 FLG (频率环增益、 STA (频率环稳定性、 UFR(IR补偿等参数非常敏感。
具体说明如下:
(1在 L 或 P 控制模式下,当 UFR 从 20%调至 100%时,实际补偿值从 20% 增至100%,此时补偿是线性的;
但在 n 控制模式下, UFR 补偿特性不是线性的,当 UFR 从 20%调至 100%时,实际补偿值是从 80%增至 100%,真正的变化是比较缓慢的,所以,出厂设置 (Ufr=20%时,实际的补偿值是 80% (见下图
Internal compensation % (actual
UFR set %
(2对小功率以及小惯量的机械, ATV28的出厂设置提供更快的响应。
为了获得大致相同的响应时间,需要将 ATV31的 FLG 调至 40 到 50之间。
.
(3对于大惯性负载,应适当加大 STA 的值;
对于小惯性负载,应适当减小 STA 的值。
(4 ATV28的出厂设定 (FLG= 33比 ATV31 (FLG=20, STA=20响应更快。
但这样的初始设置有利于在多数场合下,系统能稳定的运行。
ATV31 的 FLG-STA 调整效果非常明显,经过优化后, ATV31的性能优于 ATV28。
如果客户对低频时的快速响应要求特别高,可以将控制模式改为 L ,并适当提高 Ufr 的值。
7. 电机自整定:
(1电机的参数必须设置好 (UnS, FrS, nCr, nSP, COS, Ufr 必须设置为 20;
(2在电机为冷态时做自整定 (如电机处于热态,请等待 1小时 ;
(3不要对旋转着的电机做自调整 (电机可能被负载带动 ;
(4每次上电自调整与飞车起动功能冲突;
(5在起重应用时,应先将 drC 菜单中的 rSC (定子冷态电阻设置为 InIT , 再做自整定。
8. 加速斜坡时间:
ATV28则以 Bfr (标准电机频率 , 只能是 50或 60Hz 为基准,而 ATV31的加减速斜坡是以 Frs(额定频率,最大可修改为 500Hz 为基准。
9. 如果用户将几台变频器的 24V 端子接在一起,试图通过一个触点控制多台变频器的起停(通过 LI1等端子,在一台变频器供电另外几台不供电的情况下,供电的一台会自动起动,并无法停止。
且烧坏变频器的逻辑输入端子。
(见下图
在这种情况下,应指导客户改应将其改成变频器公共点悬空,外部 24V (如 PLC 供电。
(见下图。