跑马灯控制(定时中断应用)
PLC控制跑马灯系统的设计

河南工业职业技术学院2012—2013学年第一学期毕业设计课题名称:PLC控制跑马灯系统的设计设计时间:20012.9.25—20012.10.21 系部:机电工程系班级:机电1003*名:**指导教师:***目录前言 (3)第1章概论 (5)1.1跑马灯系统的意义、现状及要求 (5)1.1.2 技术现状 (5)1.2彩灯的发展 (6)1.2.1 彩灯的最初来源 (6)1.2.2 彩灯给城市带来的五彩缤纷 (6)1.3PLC的发展前景及趋势 (7)1.4PLC的定义及特点 (11)第2章硬件电路的设计 (13)2.1跑马灯电路的设计 (13)2.2开关电路的设计 (14)第3章软件设计 (15)3.1软件设计的方案 (11)3.2PLC结构 (14)3.3工作原理 (15)3.4编程语言 (16)3.5S7-200的指令系统 (18)3.6跑马灯的工作要求 (19)3.7梯形图 (20)结束语 (26)致谢 (27)参考文献 (28)附图 (29)PLC控制跑马灯系统的设计[摘要]本次毕业设计是应用S7-200 PLC跑马灯设计的硬件电路,并利用OB1的梯形图控制程序设计。
通过控制S7-200 PLC的定时继电器的功能来实现各彩灯按一定的规律点亮和熄灭。
接通延迟定时器SD的特点(如果RLO有正跳沿,则接通延迟定时器启动指令,以设定的时间值启动指令的定时器)。
这种控制电路结构简单,可靠性高,应用性强;软件程序适应范围广,对各彩灯按一定的规律点亮和熄灭的控制,只需要改变相应的定时器的时间接通即可。
[关键词] PLC 彩灯梯形图;前言随着科技的飞速发展,无论在日常生活中,还是在工农业发展中,PLC具有广泛的应用。
PLC的一般特点:抗干扰能力强,可靠性极高、编程简单方便、使用方便、维护方便、设计、施工、调试周期短、易于实现机电一体化。
PLC总的发展趋势是:高功能、高速度、高集成度、大容量、小体积、低成本、通信组网能力强。
跑马灯中断控制实训报告

一、实训目的本次实训旨在通过使用AT89C51单片机,结合中断技术实现对跑马灯的控制,加深对单片机中断系统、定时器/计数器以及程序设计方法的理解和掌握。
二、实训内容1. 硬件设计- 主控制器:AT89C51单片机- 驱动电路:ULN2003A驱动器- 显示电路:8个LED灯- 控制电路:按键开关2. 软件设计- 编写程序实现跑马灯的基本功能,包括:- 跑马灯模式:LED灯依次点亮,形成跑马灯效果。
- 定时控制:通过定时器实现LED灯点亮时间的控制。
- 中断控制:通过外部中断实现按键控制跑马灯模式的切换。
三、实训步骤1. 硬件连接- 将AT89C51单片机的P1.0至P1.7引脚连接至ULN2003A的输入端,用于驱动LED灯。
- 将按键开关连接至单片机的P3.2和P3.3引脚,用于控制跑马灯模式。
- 将ULN2003A的输出端连接至LED灯的正极,负极接地。
2. 程序设计- 初始化配置:- 初始化定时器T0,设置定时时间为50ms。
- 初始化外部中断0和外部中断1,配置中断触发方式为下降沿触发。
- 跑马灯控制:- 设置定时器T0中断,当定时器溢出时触发中断,实现LED灯的点亮和熄灭。
- 在中断服务程序中,通过移动LED灯的位置,实现跑马灯效果。
- 按键控制:- 当按下P3.2引脚对应的按键时,切换跑马灯模式。
- 当按下P3.3引脚对应的按键时,停止跑马灯运行。
3. 程序调试- 编译程序,将生成的HEX文件烧录至AT89C51单片机。
- 连接调试器,观察程序运行情况,确保跑马灯控制功能正常。
四、实训结果与分析1. 跑马灯效果通过实验,成功实现了跑马灯的基本功能,LED灯依次点亮,形成跑马灯效果。
定时器T0的设置保证了LED灯点亮时间的控制,中断技术实现了按键控制跑马灯模式的切换。
2. 中断控制外部中断0和外部中断1的配置保证了按键控制功能的实现。
当按下按键时,中断服务程序会根据按键的引脚和状态切换跑马灯模式或停止跑马灯运行。
微机原理跑马灯的设计原理
微机原理跑马灯的设计原理
跑马灯是一种实现循环显示效果的电路,常用于LED灯条、数字管、点阵等显示设备中。
它的设计原理与微机系统有关,具体包括以下几个方面:
1.微机系统:跑马灯的实现需要使用微机系统,包括CPU、存储器、输入输出接口等。
CPU用于控制程序的执行,存储器用于存储程序和数据,输入输出接口用于控制LED灯条的显示。
2.循环显示:跑马灯的核心是循环显示。
通过不断循环变化LED灯条的状态,形成灯条上移或下移的效果。
具体可以通过移位操作实现,将灯条的状态左移或右移,从而达到循环显示的效果。
3.定时器:为了保证跑马灯循环显示的频率和速度,需要使用定时器。
定时器可以产生一定的脉冲信号,控制每个LED灯的亮灭时间和显示周期。
定时器还可以配合中断技术实现自动循环和停止功能。
4.程序设计:跑马灯的程序设计需要采用适当的算法和流程控制语句。
一般采用循环结构控制灯条的状态变化,同时利用函数和数组等数据结构优化程序的效率和可维护性。
总之,跑马灯的设计涉及多个方面的技术,并需要综合考虑程序效率、硬件资源、用户体验等多个因素。
只有充分理解微机系统的原理和设计思路,才能更好地实
现跑马灯的功能和效果。
演示文稿2-2:跑马灯控制

0
0
0
0
0
0
0
1 0
项目实施--- 程序设计—重新赋值
项目实施--- 程序设计—停止清零
项目总结
1
2
3
移位指令的应用
定时器的灵活应用
数据传送指令的应用
项目拓展---
1
0
1
1
0
1
0
1
1
0 1
1
0
1
00 10
左移位指令功能图
知识学习--- 循环移位指令的应用
VB0存储器
初始值 执行传 送指令 执行移 位指令1
左循环移位梯形图
0 0 0 0 0 0 0 0
1
0
1
1
0
1
0
1
0
1
0 1
1
0
1
0
1
左移循环位指令功能图
项目实施--- I/O分配
输
输入继电器
入
输入元件 输出继电器
SLB OUT,N
字节左移位指令
SRB OUT,N
字节右移位指令
SLW OUT,N
字左移位指令
SRW OUT,N
字右移位指令
SLD OUT,N
双字左移位指令
SRD OUT,N
双字右移位指令
知识学习--- 循环移位指令
梯形图 语句表 指令名称 梯形图 语句表 指令名称
RLB OUT,N
字节循环左移位 指令
RRB OUT,N
字节循环右移位 指令
RLW OUT,N
字循环左移位指 令
RRW OUT, N
字循环右移位指 令
双字循环左移位 循环移位指令功能:将输入值IN中的各 指令 RLD OUT,N
第08课,定时器中断跑马灯

/quty88/
EA=1;
//打开总中断
while(1) //主程序循环 { if(ldelay) //发现有时间溢出标记,进入处理 { ldelay=0; //清除标记 P1=ledp[ledi]; //读出一个值送到 P1 口 ledi++; //指向下一个 if(ledi==4)ledi=0; //到了最后一个灯就换到第一个 } } } //定时器 2 中断 timer0() interrupt 5 { static uchar t; TF2=0; t++; if(t==30) //T2 的预置值 0x1000,溢出 30 次就是 1 秒钟,晶振 22118400HZ { t=0; ldelay=1;//每次长时间的溢出,就置一个标记,以便主程序处理 } } ――――――――――――――――――――――― 编译,进入仿真,看结果。可以看到 4 个灯以精确的 1 秒的速度不断循环跑动。
作业: 现在Βιβλιοθήκη 灯是从左到右跑动,请改为从右到左跑动。
/quty88/
第 8 课,定时器中断跑马灯 在第 3 课,我们用指令延时方式实现了跑马灯。这里我们用定时器方式再次实现,定 时器方式有效率高,定时准确等优点。 一个编程经验是,所有的中断都要尽快的运行和退出,中断服务程序越短越好,这样 才不至于干扰主程序的工作和其他中断的运行。 也就是,我们应该尽量把程序代码从中断服务函数里搬出来。 对于定时器的中断的工作方式,我们可以建立一个全局的标记,在中断里置这个标记, 然后就退出。在主程序里检查到这个标记之后,就运行相关的程序。对于 CPU 任务比较多 的项目来说,这种工作方式可以获得最佳的工作效率。当然,对于非常实时的应用要求, , 比如时钟,还是建议在中断里做完,因为使用标记的方式时,主程序可能太忙而造成错过标 记信号,就是这个标记还没有开始处理呢,下一个又来了。熟练的程序员还是可以避开这些 异常的情况的。 在我们的这个例程中,前一课的 1 秒钟输出信号,被换成了一个全局标记。在主程序 中去检查这个标记,再清 0 标记和处理相应的工作。 这一课的跑马灯输出方式也改变了,我们采用查表的方式,将要点亮的灯预先设置好, 到了时间,就一起送到 P1 口。这样,程序的执行效率会更高。 下面请认真学习和分析例程:
如何用51单片机数码管实现跑马灯功能?

如何用51单片机数码管实现跑马灯功能?51单片机数码管显示跑马灯程序源代码讲解基于51单片机学习板。
用S1键作为控制跑马灯的方向按键,S5键作为控制跑马灯方向的加速度按键,S9键作为控制跑马灯方向的减速度按键,S13键作为控制跑马灯方向的启动或者暂停按键。
记得把输出线P0.4一直输出低电平,模拟独立按键的触发地GND。
(2)实现功能:跑马灯运行:第1个至第8个LED灯一直不亮。
在第9个至第16个LED灯,依次逐个亮灯并且每次只能亮一个灯。
每按一次独立按键S13键,原来运行的跑马灯会暂停,原来暂停的跑马灯会运行。
用S1来改变方向。
用S5和S9来改变速度,每按一次按键的递增或者递减以10为单位。
数码管显示:本程序只有1个窗口,这个窗口分成3个局部显示。
8,7,6位数码管显示运行状态,启动时显示“on”,停止时显示“oFF”。
5位数码管显示数码管方向,正向显示“n”,反向显示“U”。
4,3,2,1位数码管显示速度。
数值越大速度越慢,最慢的速度是550,最快的速度是50。
(3)源代码讲解如下:#include "REG52.H"#define const_voice_short 40 //蜂鸣器短叫的持续时间#define const_key_time1 20 //按键去抖动延时的时间#define const_key_time2 20 //按键去抖动延时的时间#define const_key_time3 20 //按键去抖动延时的时间#define const_key_time4 20 //按键去抖动延时的时间void initial_myself();void initial_peripheral();void delay_short(unsigned int uiDelayShort);void delay_long(unsigned int uiDelaylong);。
8253,8259,8255中断延时跑马灯

实验名称 8253,8259,8255中断延时跑马灯实验时间 2019 年 6 月 10 日专业 17电信教师评语:姓名何明星成绩教师签名一、实验目的1.掌握8255,8259和8253的编程方法;2.利用8259和8253中断延时,8255并行输出实现跑马灯控制。
二、实验原理中断控制器的功能就是在有多个中断源的系统中,接收外部的中断请求,并进行判断,选中当前优先级最高的中断请求,再将此请求送到CPU的INTR端;当CPU响应中断并进入中断子程序后,中断控制器仍然负责对外部中断请求的管理,当某个外部中断请求的优先级高于当前正在处理的中断优先级时,中断控制器会让此中断通过而到达CPU的INTR端,从而实现中断的嵌套,反之,对他级别较低的中断则禁止。
可编程中断控制器8259的控制部分有7个8为寄存器,这些寄存器都是可编程的,即可用指令对其进行设置。
7个寄存器可分为两组,第一组寄存器为4个,它们用来存放初始化命令字ICW,分别为ICW1—ICW4;第二组寄存器为3个,它们用来存放操作命令字OCW,分别为OCW1—OCW3。
初始化命令字往往是计算机系统启动时由初始化程序来设置的,一旦设定,一般在系统工作中不再改变。
操作命令字则是由应用程序设定的,用来对中断处理过程作动态控制,在一个系统运行过程中,操作命令字可被的多次设置。
8259对外部中断请求的处理过程和工作原理如下:首先,一个外部中断请求信号通过中断请求线IRQ,传输到IMR(中断屏蔽寄存器),IMR根据所设定的中断屏蔽字(OCW1),决定是将其丢弃还是接受。
如果可以接受,则8259A将IRR(中断请求暂存寄存器)中代表此IRQ的位置位,以表示此IRQ有中断请求信号,并同时向CPU的INTR(中断请求)管脚发送一个信号,但CPU这时可能正在执行一条指令,因此CPU不会立即响应,而当这CPU正忙着执行某条指令时,还有可能有其余的IRQ线送来中断请求,这些请求都会接受IMR的挑选,如果没有被屏蔽,那么这些请求也会被放到IRR中,也即IRR中代表它们的IRQ的相应位会被置1。
11.2 跑马灯控制程序设计

1、任务分析
根据控制任务说明,我们会想到,如果使用 Q0.0至Q0.7对应控制L0至L7这8盏灯,要实现L0至 L7的顺次亮起,我们只要使1顺次填入Q0.0至Q0.7 即可,简单说就是左移顺次填1;而要使L7至L0顺 次熄灭,我们只要使0顺次填入Q0.7至Q0.0即可, 简单说就是右移顺次填0。而实际编程中,我们可 以根据这个思想,画出移位的工作流程图来,以 便辅助我们设计。如图所示。
厦电气门控大制学实物践理训与练M机O电OC工课程程学团院队
开始
初始化
左移填1
移位8次 到否?
是
右移填0
移位8次 到否?
是
按了启动按钮,系统开始工作,首
先要进行必要的初始化,特别是对
要进行移位操作区域的初始化,因
为初始化的数据不同,就意味着不
一样的移位效果。初始化好数据,
就可以左移填1,从Q0.0至Q0.7要 否 填8次,如果左移不满8次,继续左
移;当左移满8次时,开始启动右移
填0,如果右移不满8次,继续右移
,如果右移满8次说明一个完整的移
否
位过程结束,系统恢复到初始状态 ,准备再次左移。
厦电气门控大制学实物践理训与练M机O电OC工课程程学团院队
S1 SB1
提供移位脉冲
S2
为要移位的存储空间填入初值
S3
将指定存储空间每秒左移一位
左移达到8次
下面我们按步来看一下程序的编写: (2)S1步:S1步是起始步,表示程序开始运行,满足 转换条件SB1可以进入S2步。SB1为启动按钮I0.0,按 下后程序开始运行,S2步激活。我们使用M0.0来指示 启停状态,M0.0为1表示启动,M0.0为0表示停止。这 段程序比较简单,使用置位线圈指令,当I0.0按下, 使M0.0置位为1。
跑马灯1秒间隔闪烁---运用定时中断方法控制P1口亮灯实验
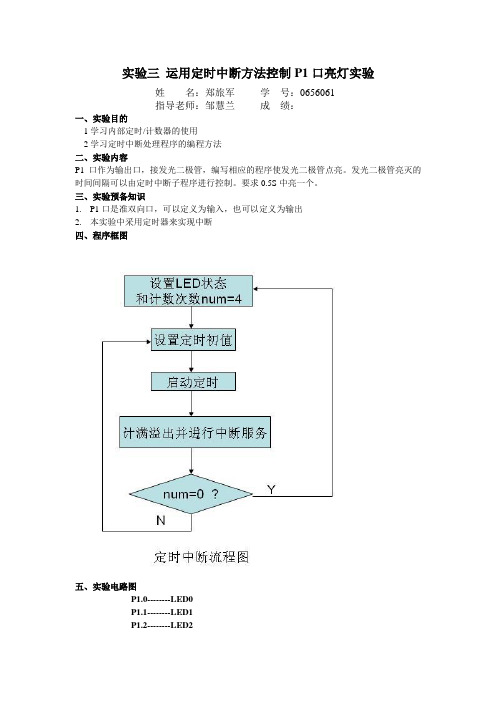
实验三运用定时中断方法控制P1口亮灯实验姓名:郑旅军学号:0656061指导老师:邹慧兰成绩:一、实验目的1学习内部定时/计数器的使用2学习定时中断处理程序的编程方法二、实验内容P1口作为输出口,接发光二极管,编写相应的程序使发光二极管点亮。
发光二极管亮灭的时间间隔可以由定时中断子程序进行控制。
要求0.5S中亮一个。
三、实验预备知识1.P1口是准双向口,可以定义为输入,也可以定义为输出2.本实验中采用定时器来实现中断四、程序框图五、实验电路图P1.0--------LED0P1.1--------LED1P1.2--------LED2P1.3--------LED3P1.4--------LED4P1.5--------LED5P1.6--------LED6P1.7--------LED7六、实验步骤1.按要求编写相应的程序#include "reg51.h"#include "intrins.h"#define uchar unsigned char#define uint unsigned intuint num=4;uchar XX=0x01;void timer0() interrupt 1{n um--;TH0=0x0B;T L0=0xDC; //重新设置初值i f(num==0){XX=_crol_(XX,1); //或者是 XX=XX<<1num=4;}}void main(){T MOD=0x01; // set model oneT H0=0x0B;T L0=0xDC; //设置初值E A=1; //总中断允许E T0=1; //定时中断允许TR0=1; //定时开始f or(;;){P1=XX; //计时溢出时,退出循环,跳到中断子程序}}由于晶振是6 MHz ,所以机器周期为 s μ2,延时0.5 S,则是延时ss μ25.0=250000个机器2,所以考虑将250000分开4次循环计时,设置计数器num。
PCA定时器跑马灯

PCA软件定时器实现跑马灯值得注意的是:与一般的51单片机定时器不同,PCA软件定时/计数方式有2种:①与一般定时器一样的功能,从给定初始值开始计数直到计数到十六进制数0FFFFH后产生定时器溢出以及溢出中断。
②从给定初始值开始计数直到计数到一个给定的比较门限值后产生定时器溢出以及溢出中断。
这里我们采用第二种软件定时器延时方法。
思路:设置PCA定时器的脉冲时钟频率,清计数器并设置比较门限值,使定时时间为50ms;然后设置定时器工作在16位计数器模式;设置使能中断,启动PCA定时/计数器开始计数。
当计数器值与比较门限值相等时,就转到PCA中断程序。
中断时,先关闭中断,并清中断标志;然后清除计数器,并自加计数寄存器,当为20时(20*50ms=1s)则判断第四个灯是否亮过。
若亮过则转第一个灯亮,否则就亮相应的灯,然后再开中断并返回主程序。
若计数寄存器不为20PCA计数器计数频率为11.0592M/12分频=0.9216M,注意,11.0592M是单片机晶体振荡器的振荡频率。
计数周期=1/0.9216M=1.085μs定时时间为50ms时所需计数次数为50ms/1.085μs=46083=B403H流程图如下所示程序如下:;-----------------------------------------------------;定义寄存器地址CMOD EQU 0D9HCCON EQU 0D8HCH EQU 0F9HCL EQU 0E9HCCAPM0 EQU 0DAHCCAP0H EQU 0FAHCCAP0L EQU 0EAHCR EQU CCON.6CCF0 EQU CCON.0;------------------------------------------------------ORG 0000HAJMP MAINORG 0033H ;PCA中断入口AJMP INTVORG 0050HMAIN: MOV CMOD,#00H;设置PCA脉冲时钟为Fosc/12 MOV R0,#0EFHMOV P1,R0MOV R1,#00H;--------------------------------------;PCA计数器清零MOV CH,#00HMOV CL,#00H;--------------------------------------;设置PCA比较/捕获模块寄存器值MOV CCAP0L,#3MOV CCAP0H,#0B4H;--------------------------------------;设置PCA模式为比较:软件定时器MOV CCAPM0,#49HMOV IE,#0C0H ;使能中断SETB CR ;PCA计数器开始计数WAIT: AJMP WAIT ;等待中断;--------------------------------------;中断服务程序INTV: MOV A,IE ;停止中断ANL A,#0BFHMOV IE,ACLR CCF0 ;清中断标志MOV CH,#00H ;清计数器MOV CL,#00HINC R1CJNE R1,#14H,NEXT ;中断20次则执行下面程序,否则到NEXT开中断MOV R1,#00HMOV A,R0RL AMOV R0,ACJNE R0,#0FEH,START ;判断第四个灯没亮过则点亮,否则转到第一个灯MOV R0,#0EFHSTART:MOV P1,R0NEXT: MOV A,IE ;开中断ORL A,#40HMOV IE,ARETIEND/* case 3:{//保存高报警值gas.ErrorValue=gas.TempDataValue;gas.StopTime=0;gas.Menuflag=4;SaveSystemData();}break;case 4:{//零点标定if(stPPMValue<gas.ErrorValue){gas.SystemStatusFlag|=CAL_MIN_FLAG;}gas.StopTime=0;gas.Menuflag=5;}break;case 5:{//量程标定if(stPPMValue>gas.WarnValue){gas.CalibrateValue=gas.TempDataValue;gas.SystemStatusFlag|=CAL_MAX_FLAG;}gas.StopTime=0;gas.Menuflag=0;}break;}gas.KeyValueTime[0]=0;gas.KeyValue=0;}/////////////////////SET键进入/////////////////////* if(gas.KeyValueTime[0]>20){switch(gas.Menuflag){case 0:{ gas.Menuflag=1;gas.TempDataValue=550;}break;case 2:{//保存低报警值gas.WarnValue=gas.TempDataValue;gas.StopTime=0;gas.Menuflag=3;SaveSystemData();}break;case 3:{//保存高报警值gas.ErrorValue=gas.TempDataValue;gas.StopTime=0;gas.Menuflag=4;SaveSystemData();}break;case 4:{//零点标定if(stPPMValue<gas.ErrorValue){gas.SystemStatusFlag|=CAL_MIN_FLAG;}gas.StopTime=0;gas.Menuflag=5;}break;case 5:{//量程标定if(stPPMValue>gas.WarnValue){gas.CalibrateValue=gas.TempDataValue;gas.SystemStatusFlag|=CAL_MAX_FLAG;}gas.StopTime=0;gas.Menuflag=0;}break;}gas.KeyValueTime[0]=0;gas.KeyValue=0;}////////////////////POWER键操作////////////////////if(gas.KeyValueTime[1]>20){switch(gas.Menuflag){case 0:{if((gas.SystemStatusFlag&SYSTEM_START_FLAG)!=SYSTEM_START_FLAG) //开机{gas.SystemStatusFlag|=SYSTEM_START_FLAG;POWER_OFF;}elseif((gas.SystemStatusFlag&SYSTEM_START_FLAG)==SYSTEM_START_FLAG)//关机{gas.SystemStatusFlag&=~SYSTEM_START_FLAG;POWER_ON;}gas.KeyValueTime[1]=0;}break;case 2:{//保存低报警值if(gas.TempDataValue<gas.ErrorValue){gas.TempDataValue++;}else{gas.TempDataV alue=0;}}break;case 3:{//保存高报警值if(gas.TempDataValue<MAX_CALIBRAT_DATA){gas.TempDataValue++;}else{gas .TempDataValue=gas.WarnValue;}}break;case 5:{//量程标定if(gas.TempDataValue<MAX_CALIBRAT_DATA){gas.TempDataValue+=10;}else{g as.TempDataValue=gas.WarnValue;}}break;}gas.KeyValue=0;}//////////////////////按键操作处理////////////////switch(gas.KeyValue){case SMW0:{//设置按键if((gas.SystemStatusFlag&SYSTEM_START_FLAG)==SYSTEM_START_FLAG){if((gas.Menuflag>1)&&(gas.Menuflag<5)){gas.Menuflag++;gas.StopTime=0;}else if(gas.Menuflag==1){gas.Menuflag=1;}else{if(LAMP_ST){mpOnTime=LAMP_TIME_DATA;}else{mpOnTime=0; }//背光控制gas.Menuflag=0;gas.StopTime=0;}}}break;case SMW1:{//电源按键switch(gas.Menuflag){case 0:{//报警控制//if((gas.SystemStatusFlag&WE_RUN_FLAG)==WE_RUN_FLAG)// {if((gas.SystemStatusFlag&WE_STOP_FLAG)==WE_STOP_FLAG){gas.SystemStatusFlag&=~WE_STOP_FLAG;//允许报警}else{gas.SystemStatusFlag|=WE_STOP_FLAG;//停止报警}// }}break;case 1:{//密码修改if(gas.TempDataValue<600){gas.TempDataValue++;}else{gas.TempDataValue=550;} if(gas.TempDataValue==gas.PassWord){gas.Menuflag=2;}}break;case 2:{//低报警值if(gas.TempDataValue<gas.ErrorValue){gas.TempDataValue++;}else{gas.TempDataV alue=0;}}break;case 3:{//高报警值if(gas.TempDataValue<MAX_CALIBRAT_DATA){gas.TempDataValue++;}else{gas .TempDataValue=gas.WarnValue;}}break;case 5:{//量程标定if(gas.TempDataValue<MAX_CALIBRAT_DATA){gas.TempDataValue++;}else{gas .TempDataValue=gas.WarnValue;}}break;}}break;}gas.KeyValue=0;} *//* switch(gas.KeyValue)//按键操作{case SMW0:{ //设置if((fd.ContStatus&SETUP_DATA_FLAG)!=SETUP_DATA_FLAG){fd.ContStatus|=SETUP_DATA_FLAG;}else{fd.ContStatus&=~SETUP_DATA_FLAG;}}break;case SMW_0:{//进入菜单fd.ContStatus|=SETUP_DISPLAY_FLAG;fd.ContStatus&=~SETUP_DATA_FLAG;//显示设置数据fd.Menuflag=0;}break;case SMW1:{//减少if((fd.ContStatus&SETUP_DATA_FLAG)==SETUP_DATA_FLAG){DataAmend(0);}else{if(fd.Menuflag>0){fd.Menuflag--;}else{fd.Menuflag=2;}}}break;case SMW_1:{if(((fd.ContStatus&SETUP_DATA_FLAG)==SETUP_DATA_FLAG)&&(fd.Menufla g==1)){DataAmend(0);}elseif((fd.ContStatus&SETUP_DATA_FLAG)==SETUP_DATA_FLAG)//调零数据保存{if((fd.Menuflag==0)&&(fd.ADCDataBuff<12800)&&(fd.ADCDataBuff>50)){fd.CalMin=fd.ADCDataBuff;fd.ContStatus&=~SETUP_DISPLAY_FLAG; //回到巡检状态fd.ContStatus&=~SETUP_DATA_FLAG;//显示设置数据fd.ContStatus|=DATA_SA VE_FLAG; //数据保存}}}break;case SMW2:{//增加if((fd.ContStatus&SETUP_DATA_FLAG)==SETUP_DATA_FLAG){DataAmend(1);}else{if(fd.Menuflag<2){fd.Menuflag++;}else{fd.Menuflag=0;}}}break;case SMW_2:{if(((fd.ContStatus&SETUP_DATA_FLAG)==SETUP_DATA_FLAG)&&(fd.Menufla g==1)){DataAmend(1);}elseif(((fd.ContStatus&SETUP_DATA_FLAG)==SETUP_DATA_FLAG)&&(fd.Menufla g==2))//标定数据保存{if((fd.Menuflag==2)&&(fd.ADCDataBuff<32760)&&(fd.ADCDataBuff>3200)){fd.CalCalibratMax=fd.ADCDataBuff;fd.ContStatus&=~SETUP_DISPLAY_FLAG; //回到巡检状态fd.ContStatus&=~SETUP_DATA_FLAG;//显示设置数据fd.ContStatus|=DATA_SA VE_FLAG; //数据保存}}}break;case SMW3:{//保持if((fd.ContStatus&DATA_MAX_FLAG)!=DATA_MAX_FLAG){fd.ContStatus|=DATA_MAX_FLAG;}else{fd.ContStatus&=~DATA_MAX_FLAG;}}break;case SMW_3:{}break;} */。
PLC控制跑马灯系统的设计
河南工业职业技术学院2012—2013学年第一学期毕业设计课题名称:PLC控制跑马灯系统的设计设计时间:20012.9.25—20012.10.21 系部:机电工程系班级:机电1003*名:**指导教师:***目录前言 (3)第1章概论 (5)1.1跑马灯系统的意义、现状及要求 (5)1.1.2 技术现状 (5)1.2彩灯的发展 (6)1.2.1 彩灯的最初来源 (6)1.2.2 彩灯给城市带来的五彩缤纷 (6)1.3PLC的发展前景及趋势 (7)1.4PLC的定义及特点 (11)第2章硬件电路的设计 (13)2.1跑马灯电路的设计 (13)2.2开关电路的设计 (14)第3章软件设计 (15)3.1软件设计的方案 (11)3.2PLC结构 (14)3.3工作原理 (15)3.4编程语言 (16)3.5S7-200的指令系统 (18)3.6跑马灯的工作要求 (19)3.7梯形图 (20)结束语 (26)致谢 (27)参考文献 (28)附图 (29)PLC控制跑马灯系统的设计[摘要]本次毕业设计是应用S7-200 PLC跑马灯设计的硬件电路,并利用OB1的梯形图控制程序设计。
通过控制S7-200 PLC的定时继电器的功能来实现各彩灯按一定的规律点亮和熄灭。
接通延迟定时器SD的特点(如果RLO有正跳沿,则接通延迟定时器启动指令,以设定的时间值启动指令的定时器)。
这种控制电路结构简单,可靠性高,应用性强;软件程序适应范围广,对各彩灯按一定的规律点亮和熄灭的控制,只需要改变相应的定时器的时间接通即可。
[关键词] PLC 彩灯梯形图;前言随着科技的飞速发展,无论在日常生活中,还是在工农业发展中,PLC具有广泛的应用。
PLC的一般特点:抗干扰能力强,可靠性极高、编程简单方便、使用方便、维护方便、设计、施工、调试周期短、易于实现机电一体化。
PLC总的发展趋势是:高功能、高速度、高集成度、大容量、小体积、低成本、通信组网能力强。
可以调控的走马灯

单片机课程设计说明书可以调控的走马灯目录1概述 (1)1.1可控走马灯的意义 (1)1.2可控走马灯的发展和现状 (1)2.课题方案设计 (2)2.1系统总体设计要求 (2)2.2 设计方案论证 (2)3.系统硬件设计 (3)3.1 总体设计 (3)3.2 单片机运行的最小系统 (4)3.3 按键电路 (5)3.4 LED显示模块 (5)4.系统软件的设计 (9)5软硬件联调及调试结果 (10)5.1软硬件调试中出现的问题及解决措施 (10)5.2 实物图 (11)5.3 调试结果 (12)结束语 (12)参考文献 (14)附录 (14)附录1 :可以调控的走马灯原理图 (14)附录2 :可以调控的走马灯PCB图 (15)附录3:Ptoteuse 仿真图 (15)附录4:C语言程序清单 (16)附录5:可控走马灯元件清单表 (19)1概述1.1可控走马灯的意义众所周知,走马灯以其绚丽的色彩赢得人们喜爱,在人们的日常生活中很常见,并在一些特定的节日里,重要场合中起着绚烂节日气氛,带给人们欢乐的作用。
可以调控的走马灯打破常规走马灯闪烁固定变化的现状,可根据人们不同的意愿进行编程设计出想要的变换的色彩效果。
1.2可控走马灯的发展和现状当前,可以调控的走马灯广泛应用于各种商业场所,娱乐场所,以及建筑物的装饰等多种场合。
可以说,可控走马灯技术的应用已渗透大到世界博览会,奥林匹克开幕式,小到节日彩灯装饰。
深入研究可控走马灯是产品提高档次和推陈出新的有效途径。
纵观单片机的发展过程,可以预示走马灯的发展趋势,单片机的发展趋势如下:低功耗CMOS化MCS-51系列的80C51推出时的功耗达120mW,而现在的单片机普遍都在100mW左右,随着对单片机功耗要求越来越低,现在的各个单片机制造商基本都采用了CMOS(互补金属氧化物半导体工艺)。
CMOS虽然功耗较低,但由于其物理特征决定其工作速度不够高,而CHMOS则具备了高速和低功耗的特点,更适合于在要求低功耗像电池供电的应用场合。
led灯带跑马灯控制原理_概述及解释说明

led灯带跑马灯控制原理概述及解释说明1. 引言1.1 概述LED灯带跑马灯控制原理是一项在现代照明领域具有广泛应用的技术。
LED灯带作为一种新型照明设备,具有节能环保、长寿命和多彩多样的特点,已广泛应用于家居装饰、商业场所和娱乐场所等领域。
而跑马灯控制则是通过不断变化的光线效果,营造出动感夺目的视觉效果。
本文将详细介绍LED灯带跑马灯控制原理,并深入解释其重要性以及应用场景。
读者通过学习本文,将对LED灯带跑马灯控制有一个全面的了解,并能在实际装饰和设计中做出合适的选择。
1.2 文章结构本文主要分为五个部分。
首先,在引言部分进行概述,给读者一个整体的了解;其次,在第二部分对LED灯带跑马灯控制原理进行详尽说明;接着,第三部分阐述了该原理的核心要点;随后,在第四部分通过实际应用案例讲解和图示展示来进一步加深读者的理解;最后,在结论部分进行总结,并展望了该技术未来的发展前景和可能的创新方向,同时给出了读者进一步学习和应用该原理的建议。
1.3 目的本篇文章旨在全面阐述LED灯带跑马灯控制原理,使广大读者对其功能、原理和应用有一个清晰的认识。
通过本文的学习,读者不仅能够了解LED灯带跑马灯控制原理在家居装饰、商业场所和娱乐场所等各个领域的实际应用案例,还能够了解其重要性和发展前景。
该文同时提供了指导读者深入学习和应用该原理的建议,使读者能够将该技术更好地应用于实际生活中。
2. LED灯带跑马灯控制原理:2.1 LED灯带基本原理:LED灯带是一种由多颗小型发光二极管(LED)组成的照明产品。
LED作为一种半导体器件,可以将电能转化为可见光能量,具有较高的亮度、节能和寿命长的特点。
LED灯带通过串联或并联多颗LED组成一个电路,使用适当的电压和电流供给来实现照明效果。
2.2 跑马灯控制的概念和应用场景:跑马灯控制是指通过控制LED灯带中不同部分的亮暗变化来呈现类似跑马灯效果的一种照明控制方式。
它可以使LED灯带在一定区域内依次闪烁、流动或变换颜色,创造出动态且吸引人的视觉效果。
单片机课程设计跑马灯的控制
单片机课程设计跑马灯的控制摘要:本设计选择对跑马灯的控制,先构思跑马灯实现预想效果,然后进行分析,根据要求编写程序,选择硬件端口,并进行调试致预想效果,最后浅谈课程设计的经历,以及总结。
目录一)课程设计的目的二)课程设计的要求三)流程图四)原理图五)程序语言六)总结七)参考资料设计题目:试设计一个闪烁跑马灯控制器,该控制器可以控制8个灯顺序亮灭。
当单片机上电后,8个灯依次从左向右亮,并且每个灯亮的时间为1秒钟。
这时,如果按钮K1按下,则灯亮的顺序是从右向左,同样,每个灯亮的时间是1秒钟。
这时,如果按下按钮K2,则此时,4个灯亮4个灯灭,延迟4秒钟以后,又开始从左向右点亮。
最后,若按下按钮K3,则全部灯亮。
此时若想再次点亮灯,必须重新上电。
题目分析:该题目要求控制8盏灯的亮灭,可使用单片机的P1.0到P1.8口来控制。
按钮K1用P3.4口,K2用P3.2口,及外部中断0,K3用P3.3口,及外部中断1,分别来实现。
单片机使用AT89C52,电源使用5V标准电源。
顺序亮灭使用外部中断源构成循环控制语句。
一、课程设计的目的课程设计是本专业集中实践环节的主要内容之一。
训练正确地应用单片机,培养解决工业控制、工业检测等领域具体问题的能力。
学生通过所做课题,熟悉单片机应用系统开发研制的过程,软硬件设计的工作方法、内容及步骤,对学生进行基本技能训练。
例如组成系统、编程、调试、绘图等。
使学生理论联系实际,提高动手能力和分析问题、解决问题的能力。
通过本课程设计,主要达到以下目的:1.使学生增进对单片机的感性认识,加深对单片机理论方面的理解。
2.使学生掌握单片机的内部功能模块的应用,如定时器/计数器、中断、片内外存贮器、I/O口、串行口通讯等。
3.使学生了解和掌握单片机应用系统的软/硬件设计过程、方法及实现,为以后设计和实现单片机应用系统打下良好基础。
二、课程设计的要求1.学生需认真阅读课程设计任务书,熟悉有关设计资料及参考资料,熟悉各种设计规范的有关内容,认真完成任务书规定的设计内容。
单片机跑马灯p0引脚对8盏灯的控制

单片机跑马灯输入引脚对8盏灯的控制1. 简介单片机跑马灯是一种常见的电子设计,通过程序控制多个灯的亮灭顺序,实现灯光闪烁的效果。
在这个设计中,我们将着重讨论单片机跑马灯中输入引脚对8盏灯的控制方法。
2. 单片机跑马灯的原理单片机跑马灯的设计原理是通过单片机的输出引脚控制LED灯的亮灭。
通过程序控制输出引脚的电平变化,可以控制LED灯的亮度,从而实现不同的灯光效果。
3. 输入引脚对8盏灯的控制方法在单片机跑马灯中,一般使用输入引脚来控制灯光的亮灭顺序。
对于8盏灯的控制,我们可以通过以下方法实现:3.1 使用二进制控制可以通过单片机的IO口输出8位二进制数,然后通过这个二进制数的变化来控制8盏灯的亮灭顺序。
可以通过循环移位的方法来实现灯光的顺序变化,从而实现跑马灯的效果。
3.2 使用计数器可以通过单片机上的定时器或者计数器来控制灯光的亮灭顺序。
通过定时器的中断生成,可以实现灯光的循环控制,从而实现跑马灯的效果。
3.3 使用外部输入还可以通过外部的输入引脚来控制灯光的亮灭顺序。
可以通过按键或者其他传感器来控制灯光的变化,从而实现跑马灯的效果。
4. 实际案例以下是一个使用输入引脚对8盏灯进行控制的实际案例:4.1 案例描述我们使用STM32单片机来设计一个跑马灯程序,通过外部引脚控制8盏LED灯的亮灭顺序。
我们设计了一个简单的电路,将8盏LED灯连接到单片机的8个引脚上,然后通过外部的输入引脚来控制LED灯的亮灭。
4.2 实现方法我们首先编写了一个简单的程序,通过外部输入引脚来控制LED灯的亮灭顺序。
我们使用定时器的中断功能,以固定的时间间隔来控制LED灯的亮灭,从而实现跑马灯的效果。
4.3 测试结果经过测试,我们成功实现了通过外部输入引脚控制8盏LED灯的跑马灯效果。
我们可以通过外部的按键来控制LED灯的亮灭顺序,从而实现不同的灯光效果。
5. 结论通过上述案例,我们可以看到,通过输入引脚控制8盏LED灯的跑马灯效果是可行的。
单片机跑马灯的实现原理

单片机跑马灯的实现原理单片机跑马灯是一种常见的电子实验,通过控制单片机的输出引脚来使多个LED 灯按照一定的模式闪烁。
实现原理主要包括硬件和软件两个方面。
硬件方面,需要用到的元器件主要包括单片机、LED灯以及合适的电阻等。
首先,通过电阻将每个LED灯与单片机的输出引脚连接,以限制电流大小,防止LED 灯过电流损坏。
然后,通过单片机的输出引脚控制LED灯的亮灭状态。
在跑马灯的实现中,通常使用一个端口的多个输出引脚来控制多个LED灯,使它们按照一定的顺序依次亮起、熄灭,形成灯的移动效果。
软件方面,通过单片机的编程实现跑马灯的控制。
首先,需要对单片机进行初始化,设置相应的引脚为输出模式。
然后,在主程序中使用循环结构控制LED的亮灭。
通常,会使用一个计数变量来记录当前亮灯的位置,然后根据该位置控制相应的输出引脚控制LED灯的亮灭。
每次循环结束后,将计数变量+1,使下一个LED灯亮起,直至所有LED灯都亮起。
具体实现中,还可以加入延时函数来控制LED灯的亮灭时间,从而调整跑马灯的速度。
延时函数的实现通常通过单片机的定时器来实现,定时器中断发生时,可以触发相应的代码来改变LED灯的状态。
通过调整定时器的定时周期,可以控制跑马灯的亮灭速度。
总结起来,单片机跑马灯的实现原理主要包括硬件和软件两个方面。
在硬件方面,通过电阻将LED灯与单片机的输出引脚连接,使用单片机的输出引脚控制LED 灯的亮灭。
在软件方面,通过单片机的编程实现跑马灯的控制,使用循环结构和计数变量控制LED的亮灭,并可以加入延时函数来控制跑马灯的速度。
通过硬件和软件的协同工作,单片机跑马灯可以实现不同的灯光效果,丰富电子实验的实现。
走马灯的原理生活应用

走马灯的原理与生活应用1. 什么是走马灯走马灯,又称跑马灯、旋转灯,是一种常见的照明设备,其灯光会不断变换位置和颜色,营造出灯光快速移动的效果。
走马灯通常由多个灯泡组成,灯泡间以等距离排列,并随着时间的流逝而顺序点亮或熄灭。
这种灯光效果经常在舞台演出、商场广告牌和室内装饰中使用,以吸引人们的注意力。
2. 走马灯的工作原理走马灯的工作原理是基于人眼视觉暂留效应和行扫描技术。
•人眼视觉暂留效应:人眼在观察快速移动的物体时,会有视觉暂留的效应,即物体在短时间内消失后,仍然会在视觉上留下瞬间的影像。
利用这一原理,走马灯能够让连续点亮和熄灭的灯泡在人眼中形成移动的效果。
•行扫描技术:走马灯的每个灯泡都有一个独立的开关控制,然后通过依次点亮或熄灭每个灯泡,再以足够快的速度重复这个过程,使得灯泡的变化连贯成流畅的移动效果。
这种开关控制可以通过电路和控制系统实现。
3. 走马灯的生活应用走马灯不仅仅是一种装饰性的照明设备,还有很多实际应用,以下是几个生活中常见的走马灯应用场景:3.1 商场和店铺广告商场和店铺利用走马灯来展示产品信息和促销活动是常见的应用方式。
通过将灯泡设置在广告牌上,不断地切换灯泡的点亮顺序和色彩,可以吸引人们的目光,增加产品的曝光度和吸引力。
3.2 舞台演出在舞台演出中,制作人会利用走马灯的特殊效果来增强舞台效果。
例如,在表演暖场时,通过走马灯快速移动的灯光来制造一个动态的氛围,让观众进入更加活跃的状态。
此外,走马灯也可以用来突出舞台的焦点,并配合不同场景的需要,改变灯光的颜色和亮度。
3.3 室内装饰走马灯也被广泛应用于室内装饰中,例如在酒店、写字楼、餐厅等地方。
通过在墙壁、天花板或柱子上安装走马灯,可以添加层次感和光影效果,提升整个空间的美感和视觉效果。
走马灯的颜色和灯光变化也可根据场地的实际需要进行调整。
3.4 车辆标识走马灯也广泛应用于车辆的标识灯,例如汽车尾灯中的滚动指示灯。
这种滚动指示灯通过一组灯泡按照一定的顺序点亮和熄灭,形成一种流动的灯光效果,向其他车辆和行人展示车辆的行驶状态和方向。
实验一跑马灯实验
目录实验一跑马灯实验 (1)实验二按键输入实验 (3)实验三串口实验 (5)实验四外部中断实验 (8)实验五独立看门狗实验 (11)实验七定时器中断实验 (13)实验十三ADC实验 (15)实验十五DMA实验 (17)实验十六I2C 实验 (21)实验十七SPI 实验 (24)实验二十一红外遥控实验 (27)实验二十二DS18B20实验 (30)1 / 32'.实验一跑马灯实验一.实验简介我的第一个实验,跑马灯实验。
二.实验目的掌握STM32 开发环境,掌握从无到有的构建工程。
三.实验内容熟悉MDK KEIL 开发环境,构建基于固件库的工程,编写代码实现跑马灯工程。
通过ISP 下载代码到实验板,查看运行结果。
使用JLINK 下载代码到目标板,查看运行结果,使用JLINK 在线调试。
四.实验设备硬件部分:PC计算机(宿主机)、亮点STM32实验板、JLINK。
软件部分:PC机WINDOWS系统、MDK KEIL软件、ISP软件。
五.实验步骤1.熟悉MDK KEIL 开发环境2.熟悉串口编程软件ISP3.查看固件库结构和文件4.建立工程目录,复制库文件5.建立和配置工程6. 编写代码7. 编译代码8.使用ISP下载到实验板9.测试运行结果10.使用JLINK 下载到实验板11.单步调试12. 记录实验过程,撰写实验报告六.实验结果及测试源代码:int main(void}<5tm32_Clock_IniC (9); /,耒红对甘去置delay^init (72 >; "延吋初始<tLED Tnit:C>;"初维花与LED连接的硬伴接口while tl){匚EDO=O;匸ED1=1;de .lay ms (300 J ;LEDO=1;LEDL-0;delay ms(3"0^;两个灯LEDO与LED1实现交替闪烁的类跑马灯效果,每300ms闪烁一次。
实验一 跑马灯实验

目录实验一跑马灯实验 (1)实验二按键输入实验 (3)实验三串口实验 (5)实验四外部中断实验 (8)实验五独立看门狗实验 (11)实验七定时器中断实验 (13)实验十三 ADC实验 (15)实验十五 DMA实验 (17)实验十六 I2C实验 (21)实验十七 SPI实验 (24)实验二十一红外遥控实验 (27)实验二十二 DS18B20实验 (30)实验一跑马灯实验一.实验简介我的第一个实验,跑马灯实验。
二.实验目的掌握STM32开发环境,掌握从无到有的构建工程。
三.实验内容熟悉MDK KEIL开发环境,构建基于固件库的工程,编写代码实现跑马灯工程。
通过ISP 下载代码到实验板,查看运行结果。
使用JLINK下载代码到目标板,查看运行结果,使用JLINK在线调试。
四.实验设备硬件部分:PC计算机(宿主机)、亮点STM32实验板、JLINK。
软件部分:PC机WINDOWS系统、MDK KEIL软件、ISP软件。
五.实验步骤1.熟悉MDK KEIL开发环境2.熟悉串口编程软件ISP3.查看固件库结构和文件4.建立工程目录,复制库文件5.建立和配置工程6.编写代码7.编译代码8.使用ISP下载到实验板9.测试运行结果10.使用JLINK下载到实验板11.单步调试12.记录实验过程,撰写实验报告六.实验结果及测试源代码:两个灯LED0与LED1实现交替闪烁的类跑马灯效果,每300ms闪烁一次。
七.实验总结通过本次次实验我了解了STM32开发板的基本使用,初次接触这个开发板和MDK KEILC 软件,对软件操作不太了解,通过这次实验了解并熟练地使用MDK KEIL软件,用这个软件来编程和完成一些功能的实现。
作为STM32 的入门第一个例子,详细介绍了STM32 的IO口操作,同时巩固了前面的学习,并进一步介绍了MDK的软件仿真功能。
实验二按键输入实验一.实验简介在实验一的基础上,使用按键控制流水灯速度,及使用按键控制流水灯流水方向。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
江 苏 省 盐 城 技 师 学 院
教 案 首 页
编 号:YJQD-0507-07 版 本:B/O 流水号: 编 制: 审 核: 批 准:
课题: 跑马灯控制(定时中断应用) 教学目的、要求:1、学习使用定时/计数器实现精确延时。
2、 熟练掌握移位指令。
教学重点、难点:熟练掌握移位指令
授课方法: 启发式教学、任务驱动型教学、实验教学 教学参考及教具(含电教设备):高职高专规划教材《单片机原理与控制技术》、多
媒体设备、DVCC 系列单片机微机仿真实验系统实验指导书。
授课执行情况及分析:
板书或教学设计:
授课日期
班 级
课题:跑马灯控制(定时中断应用)
一、知识回顾 二、任务引入 三、任务分析 四、相关知识 (1)电路功能 (2)硬件电路 (3)控制程序
五、任务实施 六、任务拓展 七、巡回指导 八、结束指导
课题 跑马灯控制(定时中断应用)
课前准备:
1、DVCC 系列单片机微机仿真实验系统
2、安装有DVCC 实验系统软件的计算机、多媒体投影仪
3、万用表及常用电工工具
组织教学:
检查学生人数、标志牌佩戴、工作服及工具准备情况。
知识回顾(复习提问):
定时中断的设定方法是什么?
任务引入:
开始时P1.0亮,延时0.2S 后,P1.1亮,如此左移7次后至P1.7再延时0.2S 右移至P1.6,如此右移7次至P1.0,循环显示。
任务分析:
一、硬件图
EA/VP 31X119X218
RESET 9RD 17WR 16INT012INT113T014T115P101P112P123P134P145P156P167P178P0039P0138P0237P0336P0435P0534P0633P0732P20
21
P2122P2223P2324P2425P2526P2627P2728PSEN 29ALE/P 30TXD 11RXD 10Vss 20
Vcc 40U2
8051
R1200R2200R3200R4200R5200R6200R7200R8200
D1LED D2LED D3LED D4LED D5LED D6LED D7LED D8
LED
T1XTAL
C1
30p F
C2
30p F
a b f c g d
e
VCC 1234567a b c d e f g 8
dp
dp
9
DS1
AMBERCA
a b f c g d
e
VCC 1234567a b c d e f g 8dp
dp
9
DS2
AMBERCA
A B C D
R910K R1010K R1110K R1210K
+5V
+5V
R0110k
+5V
+
C01
22u F
二、功能说明
开始时P1.0亮,延时0.2S 后,P1.1亮,如此左移7次后至P1.7再延时0.2S 右移至P1.6, 如此右易7次至P1.0,循环显示。
任务实施:(示范操作)
1、汇编源程序 T0初值=216
-us
us
1200000=D8F0H
TH0=D8H TL0=F0H ORG 0000H START :MOV TMOD ,#01H CLR C
MOV A ,#FFH MOV R2,#08H LOOP :RLC A MOV P1,A MOV R3,#20H LCALL DLY DJNZ R2,LOOP MOV R2,#07 LOOP1:RRC A MOV P2,A LCALL DLY
DJNZ R2,LOOP1 LJMP START DLY : SETB TR0
AGI : MOV TH0,#0D8H
MOV TL0,#0F0H LOOP2:JBC TF0,LOOP3 LJMP LOOP2 LOOP3:DJNZ R3,AGI CLR TR0 RET END
2、将上述程序,进行分析与模拟。
3、用实验箱进行验证。
4、延时改成1s ,重新验证。
任务拓展:
(1)使用延时子程序实现1S的延时
(2)实现不同花样的跑马显示
巡回指导:
1、个别辅导;集中讲解。
2、对学生提出的不同意见进行逐个分析解答。
结束指导:
1、对学生提出的不同意见进行分析解答总结。
2、对在实习过程中所存在的问题提出改进措施。
序号班级学生任务实施过程中存在的问题1
2
3
4
5
3、清理实习工位、维护保养实习设备。