CANopen通信
CANopen协议CAN总线的通信协议
CANopen协议CAN总线的通信协议CANopen协议是一种广泛应用于现代工业自动化领域的通信协议,它基于CAN总线技术,为设备之间的通信提供了一套规范和标准化的方式。
本文将介绍CANopen协议的基本原理、通信对象和通信过程。
一、CANopen协议的基本原理CANopen协议是建立在CAN总线之上的,因此首先需要了解CAN总线的基本原理。
CAN总线是一种多主机、多从机的串行通信系统。
它采用差分信号传输的方式,具有低成本、抗干扰能力强、可靠性高等特点。
CANopen协议基于CAN总线,定义了一系列的对象字典和通信服务,用于设备之间的数据交换和控制。
设备可以根据对象字典的内容来读取和写入数据,也可以通过通信服务来实现不同设备之间的通信。
二、CANopen协议的通信对象CANopen协议定义了丰富的通信对象,包括节点、对象字典和数据类型等。
其中,节点是CANopen网络中的实体,可以是主控节点或从节点。
主控节点负责整个网络的管理和控制,而从节点则负责执行具体的任务。
对象字典是CANopen协议的核心,它存储了设备的参数、状态和控制信息等。
对象字典中的每个对象都有一个唯一的标识符,用于标识该对象的类型和属性。
通过读取和写入对象字典中的数据,设备之间可以进行数据交换和共享。
CANopen协议还定义了一系列的数据类型,如布尔型、整型、实型和字符串型等。
这些数据类型可以用于描述设备的各种参数和状态,同时也可以作为通信对象的数据格式。
三、CANopen协议的通信过程CANopen协议的通信过程可以分为以下几个步骤:1. 初始化:CANopen网络在启动时需要进行初始化,包括网络配置、节点配置和通信参数的设置。
2. 启动:主控节点向从节点发送启动命令,从节点根据接收到的命令进行初始化和配置,并报告自身的状态。
3. 数据传输:设备之间通过读取和写入对象字典来进行数据的传输。
主控节点可以向从节点发送读取或写入对象的命令,从节点则根据命令进行相应的操作并回复结果。
CANopen协议讲解

CANopen协议讲解CANopen是一种基于CAN总线的通信协议,用于工业自动化领域中设备之间的数据交换和控制。
它是由CAN in Automation (CiA)组织开发和维护的,目前已成为工业领域最常用的开放式通信协议之一。
本文将详细介绍CANopen协议的基本原理、通信结构、数据通信方式以及应用领域等内容。
1. CANopen协议的基本原理CANopen协议基于CAN总线,采用了面向对象的通信模型。
它将设备抽象为对象,每个对象具有唯一的标识符,通过读写对象字典中的数据来实现设备之间的通信。
CANopen协议还定义了一套标准的通信服务和对象类型,使得不同厂商的设备可以互相兼容和交互。
2. CANopen协议的通信结构CANopen协议采用了主从式的通信结构,其中一个节点作为主节点,其他节点作为从节点。
主节点负责控制总线的访问和数据传输,从节点负责接收和响应主节点的指令。
主节点和从节点之间的通信通过报文进行,包括数据报文和远程帧。
3. CANopen协议的数据通信方式CANopen协议支持多种数据通信方式,包括点对点通信、广播通信和组播通信。
点对点通信是指主节点与特定从节点之间的通信,广播通信是指主节点向所有从节点发送相同的指令,组播通信是指主节点向特定组内的从节点发送指令。
4. CANopen协议的对象字典CANopen协议使用对象字典来存储设备的数据和配置信息。
对象字典是一个由多个对象组成的数据结构,每个对象包含了标识符、数据类型、访问权限等信息。
通过读写对象字典中的数据,可以实现设备之间的数据交换和控制。
5. CANopen协议的应用领域CANopen协议广泛应用于工业自动化领域,包括机械设备、工厂自动化、物流系统等。
它提供了可靠的数据传输和实时性能,适用于各种复杂的控制和监测应用。
CANopen协议还支持设备的配置和诊断功能,使得系统维护和故障排除更加方便。
总结:CANopen协议是一种基于CAN总线的通信协议,用于工业自动化领域中设备之间的数据交换和控制。
canopen中的对象字典通俗讲解

canopen中的对象字典通俗讲解
CanOpen是一种用于工业控制领域中的通信协议,其中的对象字典是CanOpen的核心概念之一。
对象字典是CanOpen中用于描述设备的数据结构,通常包括设备的参数、状态、控制命令等信息。
在CanOpen通讯中,各个设备之间通过发送和接收报文来实现通信。
发送方将需要发送的数据打包成报文,然后通过总线发送给接收方。
接收方在接收到报文后,将其解析并提取出所需的信息。
对象字典就是用来帮助接收方解析报文的。
发送方在发送报文时,需要将报文中涉及到的对象字典的索引和子索引打包成报文中的数
据域。
接收方在接收到报文后,就可以通过报文中的索引和子索引在对象字典中查找所需的数据。
对象字典中的每个对象都由一个唯一的索引和一个子索引组成。
索引和子索引的作用就是用来定位对象。
当接收到报文时,接收方通过报文中的索引和子索引来查找对象字典中的对应对象。
对象字典中的每个对象都有其对应的数据类型和数据长度,接收方在查找到对应对象后,就可以根据对象的数据类型和数据长度来解析出其具体的值。
除了用来描述设备参数和状态等信息外,对象字典还可以用来描述控制命令。
发送方在发送控制命令时,将命令代码打包成报文中的数据域,接收方在接收到报文后,就可以根据命令代码来执行相应的控制操作。
总之,对象字典是CanOpen通信中的核心概念之一,是用来描述设备的数据结构,包括参数、状态、控制命令等信息。
它能够帮助发
送方将所需发送的数据打包成报文,并帮助接收方解析和提取出所需的信息,从而实现设备之间的通信。
CANopen协议
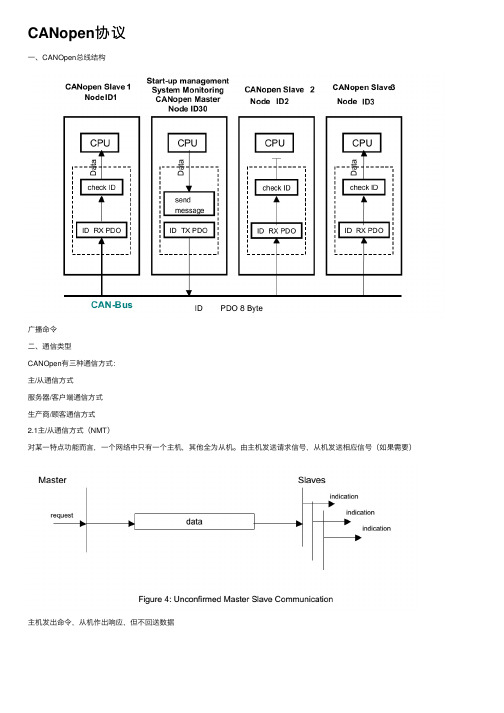
CANopen协议⼀、CANOpen总线结构⼴播命令⼆、通信类型CANOpen有三种通信⽅式:主/从通信⽅式服务器/客户端通信⽅式⽣产商/顾客通信⽅式2.1主/从通信⽅式(NMT)对某⼀特点功能⽽⾔,⼀个⽹络中只有⼀个主机,其他全为从机。
由主机发送请求信号,从机发送相应信号(如果需要)主机发出命令,从机作出响应,但不回送数据主机发出命令,从机作出响应,同时回送数据确认2.2服务器/客户端通信⽅式(SDO)这种关系指发⽣在⼀个服务器和⼀个客户端之间,客户端发送命令,服务器执⾏后,回答客户端2.3⽣产商/顾客通信⽅式(SYNC、Time Stamp、EMCY)这种通信⽅式有Push和pull两种模式,⽹络中在这⼀个⽣产⼚,0或多个顾客。
2.3.1push模式⼚商发送命令,顾客执⾏,不需回送数据2.3.2 pull模式⼚商发送命令,顾客执⾏,回送证实数据三PDO传送模式PDO分为TPDO(发送PDO)与RPDO(接收PDO)两种,PDO的传送模式有两种:同步传送与异步传送。
同步传送⼜分为周期传送与⾮周期传送3.1同步传送由某⼀个同步应⽤在⽹路上周期性的发送同步对象,及发送SYNC帧,该同步应⽤可以是主机也可以是从机PDO通信参数中的传输类型说明传送模式与触发⽅式,TPDO:传送类型同时说明其传送率,以基本传送周期的倍数表⽰。
传送类型为0时,表⽰当某事件发⽣后,收到⼀个同步对象帧(SYNC)时,⽴刻进⾏数据传输。
(⾮周期传送)传送类型为1时,表⽰当每收到⼀次同步对象帧(SYNC)时,传送⼀次数据。
(周期传送)传送类型为n时,表⽰当每收到n次同步对象帧(SYNC)时,传送⼀次数据。
(周期传送)RPDO:接收是在收到SYNC信号后,运⾏接收,独⽴于传输参数定义的传送率。
传输类型 252 为⾮周期传输,在接收到同步对象后进⾏采样但不发送,在接收到请求该数据的远程帧后发送。
3.2异步传送TPDO: 异步传送与SYNC⽆关,传输类型 253-255 为异步传输,定义为此三种类型的 TPDO在接收到远程帧或规定的事件发⽣后进⾏传输。
CANopen协议应用指南

CANopen协议应用指南CANopen协议是一种用于控制与通信领域的通用现场总线协议。
它构建在CAN(控制器区域网络)总线上,提供了一种开放、高效、可靠和灵活的方式来组织和管理分布式系统。
本文将介绍CANopen协议的应用指南,主要包括网络结构、数据通信、设备配置和节点管理等方面。
首先,网络结构是CANopen协议应用的基础。
CANopen网络由一个或多个节点组成,节点之间通过CAN总线进行通信。
每个节点都有一个唯一的标识符,用于区分不同的节点。
网络结构可以是主-从结构,其中一个节点作为主节点,负责控制和管理其他从节点;也可以是对等结构,所有节点都可以互相通信和交互。
网络结构的选择取决于实际应用的需求。
其次,数据通信是CANopen协议的核心功能之一、CANopen提供了多种数据通信方式,包括广播通信、点对点通信和多点通信。
广播通信是将数据广播到整个网络中的所有节点;点对点通信是两个特定节点之间的直接通信;多点通信是将数据发送到一个或多个指定的节点。
CANopen还提供了一种灵活的通信参数设置机制,可以根据应用需求进行定制。
设备配置是CANopen协议应用中的重要环节。
每个CANopen设备都有一个设备描述文件(EDS),其中包含了设备的标识、功能和配置信息。
在设备配置过程中,需要根据实际应用需求修改和设置设备的各个参数,例如节点ID、通信速率、数据对象和服务对象等。
设备配置的目的是确保网络中的所有节点能够正确地进行通信和交互。
最后,节点管理是CANopen协议应用中的关键任务之一、节点管理包括节点的启动、停止、心跳检测、重启以及节点状态的监控和管理等。
CANopen协议提供了一系列的节点管理服务,如NMT(网络管理)服务、SDO(服务数据对象)服务和EMCY(紧急)服务等。
通过节点管理,用户可以对网络中的节点进行灵活的控制和管理。
总结而言,CANopen协议是一种强大的通信协议,可以广泛应用于控制与通信领域。
canopen应用场景

canopen应用场景
Canopen是一种通信协议,常用于工业自动化领域。
以下是Canopen应用场景。
1. 机器人控制
Canopen协议适用于控制机器人的运动和操作。
它可以管理各种传感器和执行器,实现准确的位置控制、力控制和速度控制。
2. 智能仓储
Canopen协议可用于控制仓库中的各种设备,如物流传输机器人、货架、升降机等。
它可以实现快速、高效的物流运输和仓库管理。
3. 医疗设备
Canopen协议可以用于控制医疗设备,如手术机器人、心脏起搏器等。
它可以实现高精度的位置控制和操作控制,保证手术的安全和精确性。
4. 电动汽车
Canopen协议可用于控制电动汽车的各种系统,如驱动、制动和转向系统。
它可以管理电池状态、动力分配、车速控制等,实现电动汽车的高效、安全运行。
5. 工业机械
Canopen协议可用于控制各种工业机械,如机床、注塑机、冲压机等。
它可以管理传感器和执行器,实现高精度的位置控制和动作控制,提高工业机械的生产效率和质量。
- 1 -。
canopen通信流程
canopen通信流程CanOpen是一个开放式通信协议,用于在实时应用中控制和采集数据。
它是属于CAN总线的一种协议。
CanOpen通讯流程涉及到一些基本的概念和过程。
以下是CanOpen通信流程的详细介绍。
CanOpen协议的底层使用了CAN总线作为物理传输层,因此首先需要进行CAN总线的初始化。
CAN总线由两个主要部分组成,即通信周期和数据通信。
通信周期定时发送同步信息,这样所有节点可以以相同的时钟步进同步自己的操作。
数据通信则涉及其他高级的CanOpen对象,如节点状态,SDO(Service Data Object),PDO(Process Data Object)等。
CanOpen通信流程的具体步骤如下:1.初始化CAN总线:首先需要初始化CAN总线,包括设置波特率、过滤器和接收缓冲区等参数。
每个节点都必须进行这个步骤以确保与总线的正常通信。
2. 设置节点ID:每个CanOpen节点都需要有唯一的标识符,用于在总线上进行通信。
节点ID可以是一个独立的32位数值,也可以是一个组合的16位ID和8位的子标识符。
3. 节点状态管理:CanOpen节点有几种不同的状态,包括pre-operational、operational和stopped等。
在通信之前,节点必须进入pre-operational状态,并执行一些配置和初始化任务。
然后,节点可以进入operational状态,开始正常的数据通信。
4. SDO(Service Data Object)通信:SDO是CanOpen协议中用于传输配置和控制信息的对象。
它可以用于读取或写入节点的参数和数据。
SDO通信需要一个主节点和一个从节点。
主节点发送请求(Read或Write),从节点则返回响应。
这样可以方便地配置和控制节点。
5. PDO(Process Data Object)通信:PDO用于实时传输节点的实际过程数据。
PDO通信是基于事件触发的,其中一个节点可以发送对另一个节点的数据更改请求。
canopen协议总结

canopen协议总结Canopen协议总结Canopen协议是一种用于工业自动化领域的通信协议,它基于CAN总线技术,旨在实现不同设备之间的数据交换和通信。
本文将对Canopen协议进行总结,从协议的特点、应用领域、通信原理以及协议的优缺点等方面进行阐述。
一、Canopen协议的特点Canopen协议具有以下几个特点:1. 灵活性:Canopen协议可以适应不同设备的通信需求,支持多种数据类型和通信方式。
2. 实时性:Canopen协议使用CAN总线作为物理层,具有快速的数据传输能力和实时性。
3. 可扩展性:Canopen协议支持多种设备和功能的集成,可以灵活地扩展和配置系统。
4. 易于实现:Canopen协议的实现相对简单,开发者可以根据协议规范进行开发和调试。
5. 开放性:Canopen协议是一个开放的标准,可以由不同的厂商进行实现和定制。
二、Canopen协议的应用领域Canopen协议广泛应用于工业自动化领域,特别是机械制造、自动化控制、过程监控等领域。
它可以用于各种设备之间的通信,例如驱动器、传感器、执行器、控制器等。
Canopen协议还常用于机器人控制、物流系统、电力系统等领域,以实现设备之间的数据交换和协调工作。
三、Canopen协议的通信原理Canopen协议的通信原理如下:1. 节点:Canopen网络中的每个设备称为一个节点,节点可以是驱动器、传感器、控制器等。
2. 对象字典:Canopen节点中存储了一个对象字典,用于存储数据和参数。
对象字典由索引和子索引组成,可以通过索引和子索引来访问和操作数据。
3. 进程数据对象(PDO):PDO是Canopen节点之间实时传输数据的机制,它可以通过预定义的COB-ID进行数据交换。
4. 服务数据对象(SDO):SDO是Canopen节点之间非实时传输数据的机制,它通过请求和响应的方式进行数据交换。
四、Canopen协议的优缺点Canopen协议具有以下优点:1. 可靠性高:Canopen协议使用CAN总线作为物理层,具有抗干扰能力强、可靠性高的特点。
canopen通讯线接法

canopen通讯线接法canopen通讯线是一种用于工业自动化领域的通信协议,它采用了开放的标准化通信协议,可以实现不同设备之间的通信和数据交换。
在canopen通讯线接法中,有一些重要的要点需要注意。
在canopen通讯线接法中,需要使用合适的物理层接口来连接不同设备。
常见的物理层接口有CAN总线接口和RS485接口。
CAN总线接口是一种基于控制器局域网技术的通信接口,它可以实现高速、可靠的数据传输。
RS485接口是一种常用的串行通信接口,它具有抗干扰能力强、传输距离远等优点。
根据实际需求,可以选择合适的物理层接口来连接canopen通讯线。
在canopen通讯线接法中,还需要考虑设备的节点配置和地址分配。
每个设备在canopen网络中都有一个唯一的节点ID,用于标识设备的身份。
节点ID的分配需要遵循一定的规则,以确保网络中的设备能够正确地进行通信。
在节点配置和地址分配过程中,可以使用canopen配置工具来简化操作,提高配置效率。
在canopen通讯线接法中,需要注意数据传输的方式和协议格式。
canopen通讯线使用了一种基于对象字典的数据传输方式,可以支持不同类型的数据传输,如PDO(过程数据对象)和SDO(服务数据对象)。
PDO是一种实时数据传输方式,适用于需要高实时性的数据传输场景。
SDO是一种基于请求-应答模式的数据传输方式,适用于需要可靠传输的数据传输场景。
在使用PDO和SDO进行数据传输时,需要注意数据的格式和编码方式,以确保数据的正确传输和解析。
在canopen通讯线接法中,还可以使用网络管理工具来监控和管理canopen网络。
网络管理工具可以实时监测网络中各个设备的状态和通信质量,并提供相应的管理功能,如设备配置、故障诊断、网络优化等。
通过使用网络管理工具,可以提高canopen网络的稳定性和可靠性。
canopen通讯线接法是一种重要的工业自动化通信方式,它可以实现不同设备之间的高效通信和数据交换。
canopen参数
canopen参数CANopen是用于工业自动化应用的一种通信协议,它基于控制器局域网(Controller Area Network,CAN)协议。
CANopen协议定义了设备之间的通信规则、数据交换方式、设备对象字典(Device Object Dictionary,DOD)以及设备管理过程等。
以下是一些常见的CANopen参数:1.通信速率:CANopen协议支持多种通信速率,常见的有125Kbps、250Kbps、500Kbps和1Mbps。
通信速率的选择取决于应用需求和网络负载。
2.报文标识符:CANopen协议使用29位的标识符(Identifier)来标识不同的报文。
每个标识符对应一个特定的服务或信号。
3.数据长度:CANopen协议支持不同长度的数据帧,最常用的有8字节、16字节、32字节和64字节。
数据长度应根据实际需要选择。
4.位时间:CANopen协议使用位时间来定义信号的采样频率。
位时间是信号在物理线上传输所需的时间,可以根据通信速率和数据长度计算出来。
5.重发次数:CANopen协议支持报文的自动重发功能,可以通过配置重发次数来提高通信的可靠性。
重发次数的选择应根据实际情况进行调试和优化。
6.校验方式:CANopen协议支持多种校验方式,包括位反转、循环冗余校验(CRC)等。
可以根据实际需要选择适合的校验方式来提高数据的准确性。
7.节点地址:每个CANopen设备都有一个唯一的节点地址(NodeID),用于标识设备在CAN总线上的位置。
节点地址可以是1到247之间的任意数值。
8.设备类型:CANopen协议定义了多种设备类型(Device Type),包括传感器、执行器、控制器等。
每个设备类型都有一组特定的对象字典(Object Dictionary,OD)用于描述设备的属性和行为。
9.预定义对象:CANopen协议提供了一组预定义的对象(PredefinedObjects),用于实现一些通用的功能,如时间同步、设备参数配置等。
canopen应用案例

canopen应用案例
CanOpen是CAN总线上的一种高级通信协议,广泛应用于工业自动化领域。
下面我们将介绍几个CanOpen应用案例:
1. 焊接设备控制系统
该控制系统使用CanOpen协议实现了所有焊接设备的自动化控制。
每个焊接设备都通过CAN总线连接到一个CanOpen节点,节点之间可以实现实时数据交换。
通过CanOpen协议规定的数据类型、对象字典和服务,可以实现远程节点的配置、控制和诊断。
2. 电动汽车电池管理系统
电动汽车电池管理系统需要对车载电池进行实时监测和控制,以保证电池的安全和性能。
该系统使用CanOpen协议实现了电池管理单元和控制器之间的通信,可以实时获取电池的电压、温度、电量等参数,并根据控制器的指令进行充放电控制。
3. 工业机器人控制系统
工业机器人控制系统需要对机器人的运动轨迹、速度、力度等参数进行实时控制。
该控制系统使用CanOpen协议实现了机器人控制器和各个关节的通信。
通过CanOpen协议规定的PDO和SDO数据传输方式,可以实现高速、实时的数据传输。
4. 液压系统控制
液压系统控制需要对液压泵、电磁阀、油温传感器等设备进行精确控制。
该控制系统使用CanOpen协议实现了液压控制器和各个液压设备的通信。
通过CanOpen协议规定的服务和PDO数据传输方式,可
以实现实时的控制和反馈。
CAN及CANOPEN协议解析
CAN及CANOPEN协议解析CAN(Controller Area Network)是一种用于实时应用的串行通信协议,最初由德国Bosch公司开发。
CAN协议主要用于汽车电子控制单元(ECU)之间的通信,但也被广泛应用于其他领域,如工业自动化和机械控制等。
CAN协议是一种基于事件触发的通信协议,其特点是高可靠性、实时性和抗干扰能力强。
CAN总线上的设备可以同时发送和接收数据,无需主从节点的切换,每个节点都有唯一的标识符,用于区分不同的设备。
CAN协议在物理层采用差分信号进行通信,具有抗干扰能力强的特点。
CAN总线上的设备通过发送和接收电平差分信号来进行通信。
其中,低电平表示逻辑1,高电平表示逻辑0。
由于采用了差分信号,CAN总线可以进行长距离传输,并且具有较高的抗干扰能力。
在数据链路层上,CAN协议采用了帧格式来进行数据的发送和接收。
CAN帧由多个字段组成,包括报文标识符(CANID)、控制位(控制帧或数据帧)、数据长度编码和数据域等。
CAN帧可以分为标准帧和扩展帧,标准帧有11位的CANID,而扩展帧有29位的CANID,扩展帧的CANID可以用于更灵活的数据传输。
CAN协议在应用层上定义了一些常用的通信协议,如CANopen。
CANopen是一种通用的高层协议,用于在CAN总线上实现设备之间的通信和数据交换。
CANopen协议定义了一套标准的对象字典,用于描述设备的功能和参数配置。
设备可以通过读写对象字典中的数据来实现通信和配置。
CANopen协议还定义了一套通信和设备管理的规则,包括心跳检测、节点状态和网络管理等。
这些规则确保了设备之间的可靠通信和及时响应。
CANopen协议还支持多种通信模式,如点对点、广播和组播,以满足不同应用场景的需求。
总之,CAN及CANopen协议是一种用于实时通信的串行通信协议,在汽车电子和工业控制等领域得到了广泛应用。
它们具有高可靠性、实时性和抗干扰能力强的特点,并且支持灵活的数据传输和设备管理。
canopen domain类型
canopen domain类型CanOpen是一种用于工业自动化领域的通信协议,它定义了在CAN 总线上进行通信的规则和标准。
本文将介绍CanOpen协议的基本概念、通信对象、通信方式以及应用领域。
一、CanOpen协议的基本概念CanOpen是基于CAN总线的一种开放式通信协议,它提供了一种标准化的方式,用于在工业自动化系统中实现控制器之间的通信。
CanOpen协议定义了一系列通信对象和服务,以及它们之间的关系和交互方式。
二、CanOpen的通信对象CanOpen协议定义了多种不同类型的通信对象,包括数据对象、字典对象、进程对象等。
数据对象用于存储和传输数据,字典对象用于存储和传输字典信息,进程对象用于执行特定功能。
这些通信对象可以通过CanOpen的服务进行访问和操作。
三、CanOpen的通信方式CanOpen协议支持两种不同的通信方式,分别是点对点通信和广播通信。
点对点通信是指只有特定的设备能够接收到通信消息,而广播通信是指所有设备都能够接收到通信消息。
在点对点通信中,通信消息是直接发送给目标设备的,而在广播通信中,通信消息会被所有设备接收并处理。
四、CanOpen协议的应用领域CanOpen协议在工业自动化领域有着广泛的应用。
它可以用于各种不同的设备之间的通信,包括传感器、执行器、PLC等。
CanOpen协议提供了一种灵活和可扩展的通信方式,使得不同设备之间可以方便地进行数据交换和控制命令的传输。
总结:CanOpen是一种用于工业自动化领域的通信协议,它定义了在CAN 总线上进行通信的规则和标准。
CanOpen协议包括了通信对象、通信方式等重要概念,可以实现不同设备之间的数据交换和控制命令的传输。
CanOpen协议在工业自动化领域有着广泛的应用,可以用于传感器、执行器、PLC等设备之间的通信。
通过使用CanOpen协议,工业自动化系统可以实现更高效、更可靠的通信,提高生产效率和降低成本。
变频器 CanOpen 通信卡说明书
10P-0007 CanOpenCommunication CardTo be used with AC10P Series InverterProduct ManualIssue 12016 Parker Hannifin Manufacturing Ltd.All rights strictly reserved. No part of this document may be stored in a retrieval system, or transmitted in any form or by any means to persons not employed by a Parker SSD Drives company without written permission from Parker Automation Wuxi, a division of Parker Hannifin Ltd . Although every effort has been taken to ensure the accuracy of this document it may be necessary, without notice, to make amendments or correct omissions. Parker Automation Wuxi cannot accept responsibility for damage, injury, or expenses resulting therefrom.WARRANTYRefer to Parker Hannifin Manufacturing Limited Terms and Conditions of Sale. These documents are available on request at /ADC. Parker Hannifin Manufacturing Limited reserves the right to change the content and product specification without notice.变频CANOPEN说明书 (1)I.INTRODUCTION (3)1.1.CAN OPEN (3)1.2.I NSTALLA TION (3)1.3.DB15INTERFACE PINS (3)1.4.CAN–BUS CONNECTION (4)1.5.H ARDWARE LAYOUT (5)1.6.LED INDICA TOR (5)1.7.S WITCH CODE (5)1.8.I NTERFACE (6)II.OPERATION GUIDE (6)2.1B AUD RA TE (6)2.2A DDRESS AND BAUD RA TE SETTING (6)2.3P ARAMETERS SETTING (7)2.4P ROTOCOL (7)2.5NMT CONTROL DEMAND (8)2.6N ODE PROTECTION FUNCTION (8)2.7S ERVICE DATA OBJECT (SDO) (8)2.7.1 Demand format of master station reading slave station (9)2.7.2 Node response when master station reads command (9)2.7.3 command format of master station writing parameters (11)2.7.4从节点响应主站写入数据命令 (11)2.8PDO (13)2.8.1节点进行对象字典的编写 (14)2.8.2节点的TPDO通讯参数在对象字典中的定义 (14)III.运行模式 (15)3.1速度模式(P ROFILE V ELOCITY M ODE) (15)3.1.1 控制字(ControlWord) (15)3.1.2状态字(StatusWord) (16)3.1.3其他速度模式的相关参数 (17)I.Introduction1.1.CANopenCANopen is a high layer protocol which bases on CAN serial bus system and CAL(CAN application layer). The communication card is used to connect inverter to CAN network.1.2.InstallationCommunication cableFig 2-1 CANopen card installation1.3.DB15interface pinsFig 2-2 interface pins1.4.CAN –bus connection1.5.Hardware layoutFig 2-2 CANopen bus card 1.6.LED indicatorColorGreenGreenGreenRed1.7.Switch code1.8.InterfaceII.Operation guide2.1Baud rate1Mbit/s 500kbit/s25m 100m2.2Address and baud rate setting16 bits switch code of SW4 and SW5 are used to set baud rate and communication device2.3Parameters setting2.4ProtocolIn CAN network, communication objects are used to transfer data. Periodic data object uses PDO to transfer real time data (control command, given value and status information). Service data object uses SDO to transfer non-real time data (parameters). The COB-ID related to variable data is as below:NMT object: 0x000;RPDO object: 0x200+NODE-IDTPDO object: 0x180+NODE-IDTSDO object: 0x600+NODE-IDRSDO object: 0x580+NODE-IDSYNC object: 0x0802.5NMT control demandNMT control demand is sent from master station, slave station does not need to reply. The format of NMT is as below:2.6Node protection functionNMT main node can check the current state of each node by node protection service.NMT-Master node sends remote frame (no data) is as below:NMT-Slave node sends the below messageThe data includes a trigger bit (bit7), trigger bit must be set to “0” or “1 alternately when node protection response. Trigger bit must be set to “0” when node protection request. Bit 0 ~ bit 6 means2.7Service data object (SDO)SDO can visit the item in the dictionary of device object. SDO can send any length data (when the data is more than 4 bytes, it should be divided into several messages). Master node will read or write slave node object dictionary by SDO communication, to set slave node parameters, download program, define communication type and data format of PDO.2.7.1 Demand format of master station reading slave station2.7.2Node response when master station reads commandif it reads successfully, node 2 returns to the below contents:Table 3-1 Command format of node responseNote: d0,d1,d2 and d3 are the data which need to be transferred.For example, if node 2 returns to 582 4F 00 60 01 FD 00 00 00, which meaning is as below:5824F00 6001 FD 00 00 00Transfer dataSub-indexIndex1 byteRead SDONode No.Send SDOThe index of node 1 reading from node 2 object dictionary is 0x6000, the sub-index is 0x01. It is FD 00 00 00.if read failed, node 2 returns to failed information.The format is as below:Note: SDO abort code error will return to related parameters according to different error. Please refer to Appendix 1.2.7.3 Command format of master station writing parametersThe format of master writing data is as below tableFor example, node 1 will transfer 603 2F 00 70 01 FD 00 00 00 , the meaning is as blow: 6032F00 7001 FD 00 00 00Transfer dataSub-indexIndex1 byteRead SDONode No.Send SDONode 1 will write the data FD 00 00 00 to the entry of node 3 object dictionary, which index is 7000h, and sub-index is 01h.2.7.4Slave response after master writes dataif writing succeeds, node 3 will return writing success command to node 1. The format is as below:if writing failed, node will return to failed command, the format is as below:,Note: SDO abort code error will return to related parameters according to different error.Please refer to Appendix 1.Appendix 1 SDO abort code error2.8PDOPDO通信是基于生产者/消费者(Producer/Consumer)模型,主要用于传输实时数据。
canopen协议

canopen协议CANopen是一种用于工业自动化领域的通信协议,它基于控制器局域网(CAN)总线,并提供了一种标准的通信和网络管理方法。
它广泛应用于机械设备、工艺控制系统、自动化工厂和机器人等领域,以实现设备之间的数据交换和控制。
CANopen协议建立在ISO-11898标准之上,这是一种低成本和可靠的实时通信协议。
它仅需两根导线即可实现数据传输,无需任何额外的设备或硬件,节约了成本和空间。
通过使用CANopen协议,不同的设备和组件可以通过CAN总线相互通信,并实现数据交换和控制。
CANopen协议提供了一种灵活的通信模式,能够满足不同的应用需求。
它支持点对点通信、多点广播和组播通信。
其中,点对点通信是最常见的模式,其中一个设备主动请求另一个设备的数据,实现数据交换。
多点广播是将数据同时发送到多台设备,用于实现全局广播或统一的配置命令。
组播通信是将数据发送给特定的设备组,实现组内通信和联动控制。
除了通信模式,CANopen协议还提供了一套完整的网络管理方法,方便用户管理和配置所有的节点设备。
CANopen网络由一个主节点和多个从节点组成。
主节点负责管理整个网络,并控制从节点的活动。
从节点是网络中的被动设备,接收主节点的指令和请求,并将数据返回给主节点。
CANopen协议定义了一套标准的对象字典,用于存储和管理所有的数据和参数。
主节点可以通过访问对象字典来读取和写入从节点的数据,实现数据交换和控制。
CANopen协议还提供了一套标准的设备配置和诊断方法,方便用户对网络中的设备进行配置和故障排除。
用户可以通过CANopen协议实现设备的初始化、配置参数的读写、设备状态的检测和错误报告等功能。
此外,CANopen协议还支持心跳和守护机制,保证网络的稳定性和可靠性。
CANopen协议具有很多的优点,例如:通信速度快、实时性强、通信距离远、数据传输可靠、可扩展性好等。
它已经成为工业自动化领域的标准协议,并得到了广泛的应用和推广。
关于CANopen通讯模块的使用方法
关于CANopen通讯模块的使用方法CANopen是一种用于工业自动化领域的开放性通信协议。
CANopen通讯模块是用于实现CANopen协议的硬件设备,可用于实现设备之间的数据通信和控制。
使用CANopen通讯模块的步骤如下:1. 硬件连接:首先,将CANopen通讯模块正确连接到设备的CAN总线上。
通常,CANopen模块有连接CAN总线的端口和连接设备的端口。
2. 配置通讯参数:在使用CANopen通讯模块之前,需要进行通讯参数的配置。
通常,CANopen模块提供了配置工具,可以通过PC连接进行配置。
需要配置的参数包括通讯速率、节点ID、节点类型等。
3. 实现对象字典:对象字典是CANopen通讯中的核心概念,用于描述设备的功能和状态。
在CANopen通讯模块中,需要根据设备的需求,定义和实现对象字典。
对象字典包括了对象索引和子索引,每个对象索引对应一个对象,每个子索引对应一个具体的属性或数据。
4. 实现应用程序:使用CANopen通讯模块进行通信和控制的核心是实现应用程序。
可以根据需要,使用编程语言(如C、C++、Python等)编写应用程序,通过CANopen模块提供的API进行数据读写、配置参数和控制操作。
应用程序可以根据对象字典中定义的数据结构进行数据的读取和设置,并且可以通过发送CANopen消息实现设备之间的通信。
5. 测试和调试:在完成应用程序的编写后,需要进行测试和调试。
可以使用CANopen分析仪等工具监控通讯数据的传输和接收情况,确保数据的正确性和稳定性。
如果遇到问题,可以使用调试工具对通讯模块进行配置和故障排除。
使用CANopen通讯模块时需要注意以下几点:1.确保硬件的连接正确,包括连接CAN总线和设备的电源等。
2.在配置通讯参数时,需要确保设备的节点ID唯一,并设置正确的通讯速率。
3.在定义对象字典时,需要根据设备的需求和规范进行合理的设计和实现。
4. 在编写应用程序时,需要熟悉CANopen协议和通讯模块提供的API,以确保正确的数据读写和控制操作。
CANopen协议讲解

CANopen协议讲解协议背景:CANopen是一种基于CAN总线的通信协议,用于实现工业自动化设备之间的通信和数据交换。
它是由CAN in Automation(CiA)组织开发和维护的,被广泛应用于机械、汽车、医疗设备等领域。
协议目的:CANopen协议的目的是提供一种标准化的通信方式,使不同厂家的设备能够互联互通,并且能够方便地进行配置、监控和控制。
通过CANopen协议,用户可以实现设备之间的高效通信,提高系统的可靠性和灵活性。
协议特点:1. 灵活性:CANopen协议支持多种通信速率和通信模式,能够适应不同应用场景的需求。
2. 可扩展性:CANopen协议定义了一套丰富的对象字典,用户可以根据自己的需求进行扩展和定制。
3. 可靠性:CANopen协议采用了错误检测和纠正机制,能够保证数据的可靠传输。
4. 实时性:CANopen协议支持实时通信和事件驱动机制,能够满足对实时性要求较高的应用场景。
5. 简单性:CANopen协议的数据帧格式和通信规则相对简单,易于理解和实现。
协议结构:CANopen协议由两个主要部分组成:对象字典和通信过程。
1. 对象字典:对象字典是CANopen协议的核心概念,它定义了设备支持的各种对象和参数。
对象字典以16位的索引和8位的子索引进行标识,包括了数据类型、访问权限、默认值等信息。
用户可以通过读写对象字典中的对象来实现对设备的配置和控制。
2. 通信过程:CANopen协议使用基于事件的通信机制,通过发送和接收数据帧来实现设备之间的通信。
通信过程包括以下几个步骤:- NMT(网络管理):用于启动、停止、重启和同步网络中的设备。
- SDO(服务数据对象):用于读写对象字典中的对象。
- PDO(过程数据对象):用于实时传输设备的过程数据。
- SYNC(同步):用于同步网络中的设备,实现精确的时间控制。
- EMCY(紧急):用于向网络中的设备发送紧急事件信息。
协议应用:CANopen协议广泛应用于工业自动化领域,包括机械、汽车、医疗设备等。
canopen协议详解

canopen协议详解CANopen协议详解。
CANopen是一种基于CAN总线的高层通信协议,它广泛应用于工业控制、汽车电子、医疗设备等领域。
本文将详细介绍CANopen协议的相关内容,包括其基本原理、通信对象、数据传输方式以及应用范围等方面的内容。
首先,我们来了解一下CANopen协议的基本原理。
CANopen协议是建立在CAN总线之上的一种通信协议,它采用了基于对象字典的通信模型,通过定义不同的通信对象来实现设备之间的数据交换。
CANopen协议还采用了一种灵活的网络管理机制,可以实现设备的自动识别和配置。
这种基于对象字典的通信模型和灵活的网络管理机制,使得CANopen协议在工业控制领域得到了广泛的应用。
其次,我们将介绍CANopen协议中的通信对象。
CANopen协议定义了许多不同类型的通信对象,包括PDO(过程数据对象)、SDO(服务数据对象)、NMT (网络管理对象)等。
这些通信对象可以实现设备之间的数据交换、参数配置、网络管理等功能。
通过对这些通信对象的灵活应用,可以实现复杂的控制系统,满足不同应用场景的需求。
接下来,我们将详细介绍CANopen协议的数据传输方式。
CANopen协议采用了基于事件驱动的数据传输方式,通过PDO和SDO等通信对象来实现数据的传输和交换。
PDO是一种实时数据传输方式,可以实现设备之间的实时数据交换;而SDO则是一种参数配置和管理方式,可以实现设备参数的读写和配置。
通过这些数据传输方式,CANopen协议可以实现设备之间的高效通信和数据交换。
最后,我们将介绍CANopen协议在不同领域的应用范围。
由于CANopen协议具有灵活的通信模型、丰富的通信对象和高效的数据传输方式,它在工业控制、汽车电子、医疗设备等领域得到了广泛的应用。
在工业控制领域,CANopen协议可以实现设备之间的实时数据交换和控制,满足复杂控制系统的需求;在汽车电子领域,CANopen协议可以实现车载电子设备之间的通信和数据交换;在医疗设备领域,CANopen协议可以实现医疗设备之间的数据交换和控制。
canopen通信流程
控制流程
1 epos控制器上电和上位机上电
2 上位机发送reset all node指令,其指令代码
3 上位机发送reset communication指令,指令代码
返回的指令代码,用于判断是否控制器是否响应
4上位机发送start node指令,指令代码
5 上位机发送pre-operation指令,指令代码,配置所需PDO
其中PDO配置按照SDO方式
6上位机发送start node指令,指令代码
7上位机发送位置操作模式指令,SDO方式,指令代码
8上位机发送位置模式中需要的参数值,比如速度,加速度等指令,SDO模式,指令代码查看OD表
9上位机发送控制字指令,SDO和PDO都可以,让电机disable,指令代码
10上位机发送控制字指令,SDO和PDO都可以,让电机enable,进行位置操作模式工作,指令代码
11上位机发送目标位置指令,在target position写入该值,PDO发送保证发送频率快
12 上位机发送控制字指令,PDO发送,让电机按照绝对相对等不同方式运动,按照步骤11的指定位置动作,指令代码
13 上位机发送控制指令,PDO发送,让电机能够接收下个位置目标值,指令代码
13 如果有需要检测状态字查看是否到达目标位置,准备下个周期的位置发送,返回步骤11 14接收线程一直接收相应的电机状态字,位置速度变量,便于后续读取。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
Device Profile CiA Device Profile CiA Device Profile CiA
DSP-401
DSP-404
DSP-XXX
OSI Layer 7 應用層
CiA DS-301 通訊概況
OSI Layer 2 資料連結層
CAN 控制器
CAN 2.0A
OSI Layer 1 物理層
Index Sub
Definition
Value
R/W Size
0x1A00 0 0. Number
PDO SDO SYNC Time Stamp EMCY Boot-up NMT
初始化 ○
预运转
○ ○ ○ ○
○
(15) 自动进入重置应用状态
(16) 自动进入重置通讯状态
A: NMT
B: Node Guard
C: SDO
D: Emergency
E: PDO
F: Boot-up
运转
停止
○
○
○
○
○
○
○
3
C2000 之 CANopen 通讯简介
(1) 初始化
(15) 重置應用
(16) 重置通訊
(9) (10)
( 11 )
D
(3)
(4) (5)
(6) 運 轉A B C D
(7) 停止 AB
(8)
(1) 开启电源后,自动进入初始状态 (2) 自动进入预运转状态 (3) (6)启动远程节点 (4) (7) 进入预运转状态 (5) (8) 停止远程节点 (9) (10) (11) 重置节点 (12) (13) (14)重置通讯
型态数目
Cyclic
Acyclic
PDO 传送型态 Synchronous Asynchronous
0
○
○
1-240
○
○
241-251
Reserved
252
○
253
○
254
○
255
○
形式数目(Type No)1-240 代表两个 PDO 传送之间的同步讯息(SYNC)数目。
形式数目(Type No)252 代表接收 SYNC 讯息之后立刻更新数据。
0000 0001 0010
-
0
-
-
80H
1005H, 1006H, 1007H
-
100H
1012H, 1013H
0001 0011 0100 0101 0110 0111 1000 1001 1010 1011 1100 1110
1-127 1-127 1-127 1-127 1-127 1-127 1-127 1-127 1-127 1-127 1-127 1-127
NMT (Network Management Object)
网络管理讯息 NM 遵循了主站/从站的架构进行 NMT 服务。在这架构之下只有一个主站,而此主站可 以搭配多个从站。所有的 CANopen 节点都有自己专属的 NMT 状态,而主站可以藉由 NMT 的讯息去 控制从站的状态。状态流程途如下:
型态
7 6 5 4 3 2 1 0 Index Index Index Data Data Data Data
command
L
H Sub LL LH HL HH
区域下载
Client 0 0 1 - N E S
Server 0 1 1 - - - - -
区域上传
Client 0 1 0 - - - - -
NMT 协议如下:
NMT 主站 Request
request
Start Remote Node byte 0 byte 1 CS Node-ID
COB-ID=0
NMT 從站
Indication(s)
Indication Indication Indication
数值 1 2
128 129 130
CS 定义 定义 开始 停止
内建的 CANopen 功能为一种外部控制的方法。主站可以藉由 CANopen 通讯协议的方式控制驱动器 。 CANopen 是一种以 CAN 为基础的上层协议,提供了一套标准的通讯对象:包含及时传输数据 PDO(Process Data Objects)组态数据 SDO(Service Data Objects)和一些特定的功能时间标记(Time Stamp),同步讯息 (Sync message),紧急讯息(Emergency message)。另外也订定了网络管理数据(network management data),如开机讯息(Boot-up message)、网络管理讯息(NMT message)和错误控制讯息( Error Control message)。(可以参考 CiA 网站 ) 支持功能 : CAN2.0A 协定 CANopen DS301 V4.02 DS402 V2.0 支持服务 : 支援四组 PDO (Process Data Objects) PDO1~PDO4 支援 SDO (Service Data Objects)
初始 SDO 下载; 初始 SDO 上传; SDO 错误讯息; SDO 指令以一送一回的方式进行,透过对从站节点作组态设定,SD0 可以对其节点有使用对象字典的 权利。 支持 SOP (Special Object Protocol) 301(版本 4.02)预定义的规范 同步讯息(SYNC Message) 紧急 服务(Emergency Message) 支持网络管理讯息 NMT(Network Management) NMT 模式控制(Module Control) NMT 错误控制 (Error Control) 开机讯息(Boot-up) 不支持服务 : 时间标记服务(Time Stamp)
81H-FFH 181H-1FFH 201H-27FH 281H-2FFH 301H-37FH 381H-3FFH 401H-47FH 481H-4FFH 501H-57FH 581H-5FFH 601H-67FH 701H-77FH
1014H, 1015H 1800H 1400H 1801H 1401H 1802H 1402H 1803H 1403H 1200H 1200H 1016H, 1017H
C2000 之 CANopen 通讯简介
1 CANopen 概论
关于 CANopen 协定
CANopen 是一种以 CAN 为基础的上层协议,是为了使设备达成运动控制之目的的一种控制网络功能, 就像管理系统一般。CANopen 301(版本 4.02)标准化为 EN50325-4。CANopen 各个规格包含了应用 层 和 通 讯 概 况 (CiA DS301) , 另 外 也 包 括 可 程 序 装 置 的 架 构 (CiA DS302) , 缆 线 和 连 结 器 的 建 (CiADS303-1),还有 SI 单位和文字表示方式(CiA DS303-2)。
对象字典为 CANopen 节点的群组对象,每个节点有所属的对象字典。而对象字典包含了多个参数,此 参数描述了其所支持的参数属性和数值。SDO 的存取路径是藉由索引和子索引的方式进行。每个对象 有单一的索引值,但是假如有需要的话可能会有多个子索引值。SDO 要求和响应讯息的架构如下:
Data 0
Data 1 Data 2 Data 3 Data 4 Data 5 Data 6 Data 7
0x60400010 0x6040 0 0. Control word
CAN(H) CAN(L)
從站回送訊息給主站
PDO1
主站
1 R/W
U8
0x60400010 R/W U32
0 R/W U32
0 R/W U32
0 R/W U32
0x2211
R/W
U16 (2 Byte)
從站
PDO1 data value Data 0, Data 1, Data 2, Data 3, Data 4, Data 5, Data 6, Data 7, 0xF3, 0x00,
Index Sub
Definition
Value
R/W Size
0x1600 0 0. Number
0x1600 1 1. Mapped Object PDO1 Map 0x1600 2 2. Mapped Object
0x1600 3 3. Mapped Object
0x1600 4 4. Mapped Object
进入预运转 重置节点 重置通讯
4
C2000 之 CANopen 通讯简介
SDO (Service Data Objects)
SDO 使用的模式为客户/伺服端两端,彼此有进行对象字典的权限。一个 SDO 讯息包含了一组 COB-ID(要求的 SDO 与响应的 SDO),可以在两个节点之间做存取的动作。SDO 可以传送任意大小的 数据,但是一旦超过 4 个字节就必须利用区段(Segment)传送的方式,而最后一个区段需包含结束的 指示。
CANopen 通讯协议
CANopen 通讯协议包括以下的一些服务: NMT (Network Management Object) SDO (Service Data Objects) PDO (Process Data Object) EMCY (Emergency Object)
++-
ISO 11898
关于 RJ-45 脚位定义
CAN bus
脚位 1 2 3 7
2
讯号 CAN_H CAN_L CAN_GND CAN_GND
8~1 插頭
8~1 插座
说明 CAN_H bus line (dominant high) CAN_L bus line (dominant low) 接地端/0V/V接地端/0V/V-