多关节机器人设计总结
工业机器人多关节操作技术研究与应用
工业机器人多关节操作技术研究与应用近年来,随着科技的不断发展和人们生活水平的提高,机器人技术得到了越来越广泛的应用。
尤其在工业制造领域,工业机器人越来越多地用于生产过程中的多种操作,如物料搬运、装配、焊接等。
而多关节操作技术则是工业机器人制造领域中的重要技术,广泛应用于诸如汽车制造、电子制造、机械制造等工业生产领域,大大提高了工业生产效率和质量,关系到我国制造业的大力发展。
一、工业机器人多关节操作技术概述工业机器人是一种由电动机驱动的自动化机器人,它们通过输入程序来执行各种操作。
多关节操作技术是指利用多个关节来控制机器人运动,实现各种复杂的操作。
与单关节机器人相比,多关节机器人可以更加灵活地执行各种操作,同时也能使机器人在空间中的运动更加自由,实现更加精确的运动。
目前,在工业制造中广泛使用的机器人主要包括SCARA机器人、轻型机器人和四轴机器人等。
这些机器人通常具有多个关节,每个关节控制一个自由度。
多关节机器人还可以通过增加关节来增强它的运动能力。
六轴机器人可以分别控制机器人的旋转和转角,极大地增强了机器人的灵活性。
七轴机器人则可以实现真正的立体运动,旋转、转角、倾斜等维度皆可控制,广泛应用于汽车制造、机械加工等领域。
二、工业机器人多关节操作技术的应用2.1 汽车制造领域作为工业机器人多关节操作技术的广泛应用领域之一,汽车制造领域主要应用于车身焊接、车灯组装、车窗安装等任务。
在汽车车身焊接的过程中,机器人可以根据预先输入的程序在预定位置执行相应的动作,完成车辆车身焊接的自动化任务。
在车灯组装过程中,机器人则可以完成车灯组件的拼装和安装工作,保证生产效率的同时确保零件的质量。
此外,机器人在汽车制造生产线上,还可以实现工作区域的清洁、切割、钻孔等重要任务,提高了生产效率和质量。
2.2 电子制造领域工业机器人多关节操作技术在电子制造领域的应用主要体现在电子组装、零件加工、贴装等方面。
在电子组装方面,机器人在生产线上可以根据预先输入的程序完成电子元件的插装工作,同时也能完成各种精密操作,如晶圆切割、芯片加工、线路板制造等。
多关节机器人设计总结
多关节机器人设计总结多关节机器人是一种具有多个自由度的机器人系统,可以模拟人类的运动能力和灵活性。
它由多个关节连接起来,每个关节都能够自由运动,从而实现复杂的动作和任务。
多关节机器人的设计是一个综合性的工程问题,需要考虑机械结构、动力学、控制算法等多个方面。
在多关节机器人的设计中,机械结构是一个重要的考虑因素。
机械结构的设计应该满足机器人的运动需求,并且具有足够的刚度和稳定性。
通常采用的结构形式包括串联结构和并联结构。
串联结构是将多个关节依次连接起来,形成一个链式结构;而并联结构是将多个关节同时连接到同一个平台上。
不同的结构形式具有不同的特点和应用场景,设计者需要根据具体需求进行选择。
动力学是多关节机器人设计中的另一个关键问题。
动力学研究机器人的运动学特性和力学特性,可以帮助设计者确定机器人的运动范围、速度、加速度等参数。
在动力学分析中,需要考虑多个关节之间的相互作用力以及外界对机器人的作用力。
通过动力学分析,设计者可以优化机器人的动作轨迹和控制算法,提高机器人的运动性能和精度。
控制算法是多关节机器人设计中的另一个重要方面。
通过合理的控制算法,可以实现多关节机器人的运动规划和控制。
常用的控制算法包括PID控制、模糊控制、神经网络控制等。
这些控制算法可以根据机器人的运动需求和任务要求进行选择和优化。
在控制算法的设计中,需要考虑机器人的动力学特性和运动学特性,以及外界环境的变化等因素。
多关节机器人的设计还需要考虑其他方面的问题。
例如,机器人的传感器系统用于感知外界环境和机器人自身状态,从而实现自适应和智能化控制。
另外,机器人的电源系统和通信系统也需要进行设计和优化,以保证机器人的稳定运行和与外界的信息交流。
多关节机器人的设计是一个综合性的工程问题,需要考虑机械结构、动力学、控制算法等多个方面。
合理的设计可以使机器人具备更好的运动能力和灵活性,从而应对不同的任务和环境要求。
随着科技的不断发展,多关节机器人的应用前景将会更加广阔,为人们的生产和生活带来更多便利和可能性。
机器人设计总结
机器人设计总结概述本文档旨在总结机器人设计过程中的关键要点和经验教训。
通过对机器人设计的总结,我们可以更好地了解机器人设计的流程和方法,为今后的设计工作提供指导和参考。
设计目标在机器人设计过程中,我们需要明确设计的目标和需求。
设计目标可以包括机器人的功能特点、外观设计、性能指标等方面。
在明确设计目标的基础上,我们才能有针对性地进行设计和优化。
设计流程机器人设计的流程分为几个重要的阶段,包括需求分析、概念设计、详细设计和制造生产等。
在每个阶段,我们都需要采取相应的方法和工具来完成设计任务。
1. 需求分析:在需求分析阶段,我们需要明确机器人的功能需求、使用场景、用户群体等信息。
通过与用户的沟通和调研,我们可以获取到关键的需求信息,为后续的设计工作打下基础。
需求分析:在需求分析阶段,我们需要明确机器人的功能需求、使用场景、用户群体等信息。
通过与用户的沟通和调研,我们可以获取到关键的需求信息,为后续的设计工作打下基础。
2. 概念设计:在概念设计阶段,我们需要通过创新思维和草图设计来生成多个创意方案。
这个阶段的重点是发散思维,充分挖掘不同的设计选项,并评估它们的优劣。
概念设计:在概念设计阶段,我们需要通过创新思维和草图设计来生成多个创意方案。
这个阶段的重点是发散思维,充分挖掘不同的设计选项,并评估它们的优劣。
3. 详细设计:在详细设计阶段,我们需要选择一个或多个最佳的概念方案,并进行详细的设计和优化。
这包括机械结构设计、电气设计、控制系统设计等方面的工作。
详细设计:在详细设计阶段,我们需要选择一个或多个最佳的概念方案,并进行详细的设计和优化。
这包括机械结构设计、电气设计、控制系统设计等方面的工作。
4. 制造生产:在制造生产阶段,我们需要将设计的机器人样机或产品进行制造和组装。
这个阶段需要考虑到制造过程中的工艺要求、材料选择和成本控制等方面的问题。
制造生产:在制造生产阶段,我们需要将设计的机器人样机或产品进行制造和组装。
关节型机器人技术总结

关节型机器人技术总结关节型机器人是一种应用广泛的机器人类型,具有灵活、精准的动作控制能力,可用于各种工业自动化和服务领域。
本文将对关节型机器人的技术发展和应用进行总结,以期为读者提供全面的了解。
一、关节型机器人的类型和工作原理关节型机器人根据关节数量和结构形式可以分为直接驱动和间接驱动两种类型。
直接驱动机器人通过在关节上直接安装驱动器实现关节运动,具有动作响应快、控制精度高的优点,适用于需要高精度控制的应用场景。
间接驱动机器人通过使用传动机构将电机的旋转运动转化为关节运动,更适合需要较大扭矩和稳定性的工作。
不论是直接驱动还是间接驱动,关节型机器人的工作原理都是通过控制各个关节的运动来实现机器人的移动和工作。
关节型机器人通常由多个关节连接而成,每个关节都由电机、传感器、控制器等组件组成。
这些关键组件通过控制信号和传感器数据的交互来实现关节运动控制。
二、关节型机器人的应用领域关节型机器人广泛应用于工业自动化、医疗护理、协作机器人等领域。
1. 工业自动化:关节型机器人在生产线上广泛应用于装配操作、搬运物品、焊接等任务。
其高精度和快速响应能力使其成为提高生产效率和质量的理想工具。
2. 医疗护理:关节型机器人在手术机器人和康复机器人等医疗领域发挥着重要作用。
手术机器人可以通过精确的手臂和手指运动进行复杂手术操作,提高手术准确性和安全性。
康复机器人可以帮助康复患者进行运动训练,促进康复过程。
3. 协作机器人:关节型机器人与人类共同工作的协作机器人越来越受到关注。
它们可以通过感知、规划和控制技术实现安全和高效的人机协作,广泛应用于装配、包装、仓储等领域。
三、关节型机器人的技术挑战和发展趋势关节型机器人技术的发展面临一些挑战,主要包括运动控制、感知、智能算法等方面。
1. 运动控制:关节型机器人需要实现高精度的运动控制,以满足对位置、速度和力的精确控制要求。
运动控制算法和控制器的设计是关键技术之一。
2. 感知:关节型机器人需要通过传感器获取环境信息,以实现对物体位置、形状和运动的感知。
小型多关节工业机器人设计

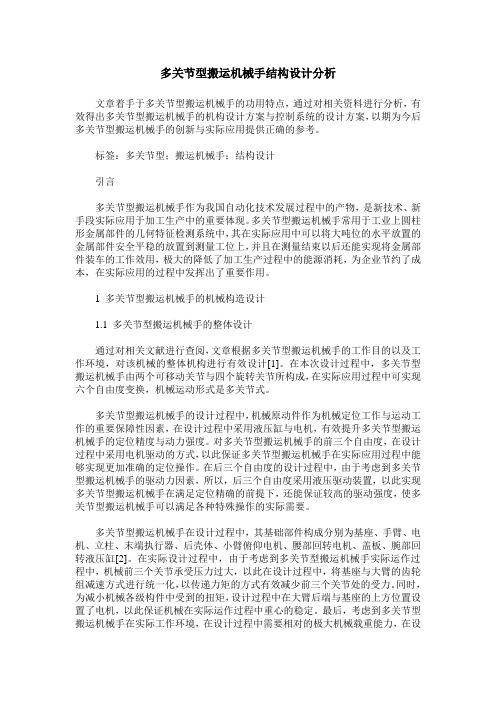
工业机器人 的主要技术规格参数
参数 - , 1 轴 轴 轴 轴 轴
结 构形式
数 控轴 数 最 大运 动 范 围R/ mm
多关节型式
5 轴 6 9 0
工 业 机 器 人 控
制 系 统 预 留 与 外 界
手部 负荷 质量/ k g 重复定位精 度/ mm 机械部 分重量/ k g 运动范 围 ( 。 ) 运动转速 ( 。 / s )
图2 手腕外形轴侧投影
多关节装配工业机器人本体结构设计中 ,突破机械
传 统 设 计 观 念 , 采 用 大 减 速 比 高 精 度 的 摆 线 减 速 机 ,通 过 伺 服 电动 机 直接 与 摆 线减 速 机相 联 接 ,驱
动工业机器人关节运动,改善工业机器人原有的传
通用机床研 究所所 长 赵 军
班
图3 十字交叉滚子轴承结构
]一 兰 = { = i \ l 6 o
。
l 5 O /
Z
。
小
1 ‘ 5 【 】 2 9 . \8 0
、
( 2 )模块 化 设 计 为扩 大开 发 出 的工 业机 器 人 自身 通 用性 ,适应 不 同 自动化 生 产线 的要 求 ,将 交
3 ±0 . O 5 1 2 0 3 2 0 1 8 0 2 6 0 3 0 0 7 2 0 1 5 0 1 3 0 2 0 0 3 6 0 3 6 0
设 备 相 连 接 的 各 类 I / 0接 口 ,如 : I / O P r e c e s s 插接头式 、
侧 投影 如 图2 所示 。
小型 多 关节 工 业 机 器 人采 用 自制 复合 型 、高精 度十字交叉滚子轴承如图3 所 示 ,因 轴 承 中 圆柱 滚 子在呈9 0 。 的V形 沟槽 滚 动 面 上 相互 垂 直 的 排 列 , 轴 承 可承 受 径 向 负荷 、轴 向负 荷及 倾 覆 力矩 等 所 有 方 向 的 负 荷 。 内 外 圈 的 尺 寸 最 大 限 度地 小 型 化 , 外 圈采 用两 体 分割 的 构造 ,轴 承预 紧 量 可调 整 ,通
关节型机器人技术总结
关节型机器人技术总结
一、概述
关节型机器人,也称为关节机械手,是工业机器人的一种常见类型。
这种机器人模仿人类手臂的关节结构,通过一系列的旋转或屈伸关节来实现物体的抓取、搬运、定位和放置等操作。
关节型机器人在许多行业中都有广泛的应用,如汽车制造、电子装配、食品包装和医药行业等。
二、技术特点
1. 灵活性:关节型机器人具有高度的灵活性,可以通过改变其关节的旋转角度来适应不同的工作环境和任务需求。
2. 高效性:关节型机器人可以在高速下进行操作,从而提高生产效率。
3. 可编程性:关节型机器人的动作可以通过编程来实现,方便更改工作流程和任务内容。
4. 可靠性:关节型机器人通常具有很高的耐用性和稳定性,能在恶劣的工作环境下持续工作。
三、关键技术
1. 运动学控制:关节型机器人的运动学控制是实现其灵活操作的基础,涉及对每个关节的角度和旋转速度的精确控制。
2. 传感器技术:为了提高操作精度和安全性,关节型机器人通常配备有多种传感器,如位置传感器、力传感器和视觉传感器等。
3. 人工智能技术:人工智能技术如机器学习和深度学习被用于提高关节型机器人的自主性和智能化水平。
4. 网络通信技术:为了实现远程控制和监控,关节型机器人需要具备强大的网络通信能力。
四、未来发展趋势
1. 人机协作:未来的关节型机器人将更加注重与人或其他机器人的协同工作,以实现更高效的生产过程。
2. 自主性:随着人工智能技术的发展,未来的关节型机器人将具备更高的自主性,能够自主完成更复杂的任务。
3. 感知能力:通过集成更先进的传感器和人工智能技术,未来的关节型机器人将具备更强的感知能力,能够更好地适应环境变化和任务需求。
串联多关节机械臂设计与分析

串联多关节机械臂设计与分析随着工业自动化的快速发展,串联多关节机械臂在工业生产、医疗康复以及航空航天等领域的应用越来越广泛。
本文旨在探讨串联多关节机械臂的设计与分析,重点讨论其设计理论、系统分析以及应用实践等方面。
在设计串联多关节机械臂时,需要考虑到机械臂的构成、工作原理以及控制策略。
通常情况下,串联多关节机械臂由多个关节连接而成,每个关节包含一个电机和一个减速器。
电机负责产生力量,使关节发生旋转,而减速器则降低电机的转速,从而增加关节的扭矩。
通过控制各个关节电机的运动,可以实现机械臂的多种姿态和动作。
在对串联多关节机械臂进行系统分析时,需要考虑其动力学分析、控制系统设计以及性能评估等方面。
动力学分析是研究机械臂运动规律的关键,通过建立动力学模型,可以对机械臂的运动姿态进行准确的预测和控制。
控制系统设计是实现机械臂精确动作的核心,需要基于计算机控制技术和传感器技术设计一个稳定的控制系统,使机械臂可以准确地执行预定动作。
性能评估是对机械臂设计和使用的关键指标,需要通过实验测试来评估机械臂的性能,包括运动精度、速度、承载能力等。
在应用实践中,串联多关节机械臂已经取得了广泛的应用效果和优势。
在工业生产中,串联多关节机械臂可以替代人工完成危险、繁重或精密的工作,提高生产效率和产品质量。
在医疗康复领域,串联多关节机械臂可以辅助病人进行肢体康复训练,帮助他们更好地恢复肢体功能。
在航空航天领域,串联多关节机械臂可以协助宇航员进行空间作业,完成各种复杂任务。
总结起来,串联多关节机械臂的设计与分析具有重要的意义和广泛的应用价值。
未来随着技术的不断发展,串联多关节机械臂的研究将更加深入,其应用领域也将更加广泛。
相信在不久的将来,我们会看到更加精巧、智能、高效的串联多关节机械臂为人类的生产、生活和工作带来更多的便利和效益。
随着空间技术的不断发展,空间机械臂作为一种重要的空间装备,在空间任务中发挥着越来越重要的作用。
空间机械臂通常由一系列关节连接,每个关节都具备一定程度的自由度和运动范围。
垂直多关节型工业机器人设计

垂直多关节型工业机器人设计引言工业机器人作为现代制造业的重要组成部分,在提高生产效率和质量方面发挥着关键作用。
垂直多关节型工业机器人是一种常用的机器人类型,其具备多个关节,可实现复杂的动作和灵活的操作。
本文将围绕垂直多关节型工业机器人的设计展开讨论,包括机械结构、电气控制系统、运动学和碰撞检测等方面。
机械结构设计关节类型垂直多关节型工业机器人通常采用旋转关节和直线关节的组合。
旋转关节可实现机器人的转动和旋转,而直线关节则可以实现机器人的伸缩和上下运动。
在设计过程中,需要根据具体的工作需求确定关节类型和数量,以实现所需的运动范围和载荷。
驱动方式垂直多关节型工业机器人的驱动方式一般包括电机和传动系统。
电机可通过电流或脉冲信号控制机器人的运动,而传动系统则用于将电机的转动转化为关节的实际运动。
常见的传动方式包括齿轮传动、带传动和蜗轮蜗杆传动等,选择合适的传动方式可有效提高机器人的精度和稳定性。
结构材料垂直多关节型工业机器人的结构材料通常采用高强度金属材料,如铝合金或钢材。
这些材料具有良好的刚性和耐磨性,可以保证机器人在较大载荷下的稳定性和工作寿命。
此外,机器人的关节部分通常采用精密轴承和联轴器等零部件,以确保机器人的精确度和可靠性。
电气控制系统设计控制器选型垂直多关节型工业机器人的电气控制系统需要选用适合的控制器。
常见的控制器包括PLC、PC或嵌入式控制器等。
选择合适的控制器可以满足机器人的运动控制和数据处理需求,并提供良好的接口和通信功能。
传感器应用传感器在垂直多关节型工业机器人中起着至关重要的作用。
通过安装传感器,可以实时检测机器人的位置、速度和姿态等信息,以实现精确的运动控制和安全保护。
常用的传感器包括编码器、陀螺仪和力传感器等,选择合适的传感器类型和数量可根据具体的应用需求。
电源供应垂直多关节型工业机器人的电源供应需要保证稳定和可靠。
一般情况下,机器人的电源供应包括直流电源和交流电源。
在设计电源系统时,需要考虑机器人的功率需求和电源容量,并采取相应的措施来确保电源质量和电路安全。
一种多关节智能机械手臂控制系统设计
一种多关节智能机械手臂控制系统设计一种多关节智能机械手臂控制系统的设计1 前言多关节智能机械手臂是一类由传感器、马达、驱动器、控制器组成的机械设备。
它在不断发展,已经成为工业化和机器视觉方面一个重要分支。
智能机械手臂能够自主控制姿态,并且控制步骤准确,故障率低。
这种机械设备在许多领域中都具有广泛的应用价值。
2 概述多关节智能机械手臂是指由三至十节电机构成的机械手臂,本质上是一种机械机构,又称为“工业机械手臂”,主要用于工业机器人的移动、抓取、装卸等作业。
它的每个关节都可以单独设定位置,并且可以连接多个数控驱动器和传感器,从而实现更高精度的控制。
3 系统设计多关节机械手臂的控制系统的设计一般由硬件和软件组成,其主要结构如下:3.1 硬件设计多关节智能机械手臂的硬件设计主要包括控制器、伺服驱动器、传感器、电机以及其他配件。
控制器:控制器是机械手臂控制系统的核心,它负责监控手臂各个关节之间的运动情况,以及手臂控制时遇到的各种环境变化。
伺服驱动器:伺服驱动器是负责将控制器输出的控制指令转化为电机执行的信号的装置,它可以实现电机的倍带换速、正反转等功能。
传感器:传感器用于获取手臂当前的运动状态,并将其反馈给控制器,从而更好地实现控制精度。
电机:电机是实现手臂运动的核心组件,一般选择具有直流电机结构的伺服驱动器,每个关节分别装配一个电机,从而实现关节的精确控制。
3.2 软件设计多关节智能机械手臂的软件设计主要包括控制算法、运动算法和数据管理系统等。
控制算法:控制算法主要用于处理控制器传感器的信号,根据环境变化实时作出准确的控制动作,使得机械手臂实现精准控制。
运动算法:运动算法是一种特殊的控制算法,主要用于实现机械手臂的复杂运动,比如机械臂的平移、旋转等。
数据管理系统:数据管理系统是一种可以记录和存储机械手臂操作过程中产生的各种数据的系统,这些数据可以进一步用于对智能机械手臂的运作情况进行评估和分析,有助于优化控制策略,提高机械手臂的运行效率。
平面多关节机械臂的机构设计与运动学分析
平面多关节机械臂的机构设计与运动学分析一、引言机器人技术的迅猛发展,使得多关节机械臂在制造、物流等领域发挥着重要作用。
在过去的几十年里,平面多关节机械臂的机构设计与运动学分析一直是研究的热点。
本文将探讨平面多关节机械臂的机构设计原理和运动学分析方法。
二、机构设计原理当设计平面多关节机械臂时,关键是确定关节的类型和机械结构的连接方式。
常见的关节类型有旋转关节和平移关节。
旋转关节可以实现机械臂在平面内的转动,平移关节可以实现机械臂的伸缩运动。
而机械结构的连接方式包括刚性连接和柔性连接。
刚性连接可以提供更高的精度和稳定性,而柔性连接则可以使机械臂具有更好的柔韧性和适应性。
三、运动学分析方法机械臂的运动学分析是研究机械臂运动规律的重要方法。
在平面多关节机械臂中,可以采用连杆法进行运动学分析。
连杆法是基于连杆机构的原理,并结合空间向量的运算进行分析。
首先,确定机械臂的坐标系和关节角度的定义,然后利用连杆法建立起机械臂各个连杆之间的关系式,最后通过空间向量的运算求解出机械臂的位姿和速度。
四、机构设计与运动学分析的应用平面多关节机械臂的机构设计与运动学分析在很多领域都有广泛的应用。
例如,在制造业中,机械臂可以代替人工完成重复性、高强度的作业,提高生产效率和产品质量。
在物流领域,机械臂可以实现货物的搬运和分拣,提高物流效率。
在医疗领域,机械臂可以用于手术操作和康复训练,帮助提高医疗水平和治疗效果。
五、结论平面多关节机械臂的机构设计与运动学分析是机器人技术的重要组成部分。
通过合理的机构设计和准确的运动学分析,可以使机械臂具有更好的性能和适应性。
未来,随着机器人技术的不断发展,平面多关节机械臂将在更多领域得到应用和发展。
因此,进一步研究机构设计原理和运动学分析方法具有重要意义,能够推动机器人技术的发展进步。
关节型机器人的结构设计及其运动学分析共3篇

关节型机器人的结构设计及其运动学分析共3篇关节型机器人的结构设计及其运动学分析1关节型机器人是一种机器人,它通过关节连接来实现运动。
这种机器人的动作比较灵活,因为它们可以在任何方向上旋转和进行其他运动。
在这篇文章中,我们将详细介绍关节型机器人的结构设计以及关节型机器人的运动学分析。
1.结构设计关节型机器人的结构设计通常由关节、链节和执行器组成。
执行器通常用于控制关节的旋转,链节是连接关节的部分,而关节则是连接链节和执行器的部分。
关节可以是旋转关节,旋转关节可以使机器人以一个轴旋转;也可以是平移关节,平移关节可以使机器人上下或前后移动。
此外,还有万向节,可以使机器人在任何方向上旋转。
链节可以是线性链节或旋转链节。
线性链节将机器人的每个部分连接在一起,而旋转链节则可以使机器人上下或前后移动。
执行器可以是电动或气动,用于控制机器人的运动。
执行器可以使用电机或其他控制系统,以改变关节的位置或旋转。
2.运动学分析关节型机器人的运动学分析涉及到机器人的运动学参数的推导。
这些参数包括关节角度、链节的长度等等。
运动学分析是设计和控制关节型机器人的重要步骤。
关节角度是指每个关节相对于中心轴线的角度。
这些角度可以用来计算机器人的位置和方向。
链节的长度是连接各个关节的链节的长度。
这些长度可以通过测量所需的距离来确定。
在运动学分析过程中,需要确定机器人的末端位置和方向。
这可以通过测量机器人的位置和角度来完成。
此外,还需要计算各个部分的速度和加速度,以便更好地控制机器人。
在运动学分析的过程中,需要考虑各种因素,如摩擦、重力等。
这些因素会影响机器人的运动,需要用仔细的计算方法进行处理。
总体而言,关节型机器人的结构设计和运动学分析需要仔细考虑,设计师需要仔细测量各个部件的尺寸和相对位置,以确保机器人的正常运作。
在设计和控制机器人时,需要仔细考虑各种因素,例如摩擦、重力和惯性等,以确保机器人可以准确地执行其任务。
关节型机器人的结构设计及其运动学分析2关节型机器人是一种基于多自由度(DOF)的机器人,关节型机器人的运动自由度非常大,可以完成多种复杂的动作。
多关节机械手机械结构设计 毕业设计
多关节机械手机械结构设计摘要自从机器人在二十世纪五十年代诞生以来,它经历了第一代工业机器人的研究、实用化、普及,第二代感知功能机器人的研究、实用化,以及第三代智能机器人的研究等各个阶段。
在六自由度机器人群体中,关节型机器人以工作范围大、动作灵活、结构紧凑、能抓取靠近机座的物体等特点备受设计者和使用者的青睐。
本次设计针对多关节机械手结构进行设计。
各个关节处采用独立的电机驱动。
设计完成的机械手包括腰回转、大小臂转动、手臂回转、手腕摆动和手腕回转六个关节。
它们具备以下功能:(1)实现末端的空间位置确定;(2)实现末端的方位变化。
本文对多关节机械手的多种结构方案进行比较,确定了最佳的结构方案;对各关节的传动和电机的选择进行了设计计算,并对齿轮进行校核计算。
关键词:多关节型机械手;结构设计;工业机械手The articulated manipulator structural designAbstractSince the robot birthed in the 1950s, it has experienced three stages as following: the first gener ation industry robot’s research, practical application and popularization, the second generation sensational function robot’s research and practical application, as well as the third generation intelligence robot’s research. In thegroup of six degrees of freedom robots, the articulated robot is cared by designer and user for its broad work range, flexible movement,compact structure, catching the object near the machine plinth.the structure of the articulated manipulator was designed,which has six degrees of freedom. Each joint is drived by the independent electric motor. The manipulator designed includs waist rotary joint, big arm rotary joint, small arm rotary joint, the arm rotation, skill swinging and the skill rotary joint. They have function as following: (1 realize terminal space position determination; (2 realize terminal change of location.The best plan is selected through compareing with many kinds of structure plan of the articulated manipulator in this article,The design and calculation is did in the selectiong of various joints transmission and the electrical motor, and the gear is checked.Key words: articulated manipulator ,Structural design,Industrial manipulator目录摘要Abstract1 绪论11.1引言11.2 机器人的现状发展趋势12 机器人的工作要求 33 机器人结构方案和驱动方案的对比分析及选用 43.1 腰部回转关节 43.2 大臂和小臂转动关节 43.3 腕部活动关节 53.4 机器人驱动方案的对比分析及选择 54 机器人结构设计 64.1 腕部回转关节设计 74.1.1 步进电机的选择 74.1.2 第一圆柱齿轮传动设计 74.1.3换向锥齿轮传动设计 114.1.4 第四级圆柱齿轮传动设计 11 4.1.5 轴的计算 114.2 腕部摆动关节设计 124.2.1 步进电机的选择 124.2.2 圆柱齿轮传动设计 124.2.3 直齿锥齿轮传动设计 164.3 手臂回转关节设计 194.3.1 步进电机的选择 194.3.2 圆柱齿轮传动设计 204.4 小臂转动关节设计 204.5 大臂转动关节设计 214.6 腰部回转关节设计 224.7 机器人总体效果图 225 结论 24参考文献附录致谢多关节机械手机械结构设计1 绪论1.1 引言我国科学家对机器人的定义是:“机器人是一种自动化的机器,所不同的是这种机器具备一些与人或生物相似的智能能力,如感知能力、规划能力、动作能力和协同能力,是一种具有高度灵活性的自动化机器。
多关节型搬运机械手结构设计分析
多关节型搬运机械手结构设计分析文章着手于多关节型搬运机械手的功用特点,通过对相关资料进行分析,有效得出多关节型搬运机械手的机构设计方案与控制系统的设计方案,以期为今后多关节型搬运机械手的创新与实际应用提供正确的参考。
标签:多关节型;搬运机械手;结构设计引言多关节型搬运机械手作为我国自动化技术发展过程中的产物,是新技术、新手段实际应用于加工生产中的重要体现。
多关节型搬运机械手常用于工业上圆柱形金属部件的几何特征检测系统中,其在实际应用中可以将大吨位的水平放置的金属部件安全平稳的放置到测量工位上,并且在测量结束以后还能实现将金属部件装车的工作效用,极大的降低了加工生产过程中的能源消耗,为企业节约了成本,在实际应用的过程中发挥出了重要作用。
1 多关节型搬运机械手的机械构造设计1.1 多关节型搬运机械手的整体设计通过对相关文献进行查阅,文章根据多关节型搬运机械手的工作目的以及工作环境,对该机械的整体机构进行有效设计[1]。
在本次设计过程中,多关节型搬运机械手由两个可移动关节与四个旋转关节所构成,在实际应用过程中可实现六个自由度变换,机械运动形式是多关节式。
多关节型搬运机械手的设计过程中,机械原动件作为机械定位工作与运动工作的重要保障性因素,在设计过程中采用液压缸与电机,有效提升多关节型搬运机械手的定位精度与动力强度。
对多关节型搬运机械手的前三个自由度,在设计过程中采用电机驱动的方式,以此保证多关节型搬运机械手在实际应用过程中能够实现更加准确的定位操作。
在后三个自由度的设计过程中,由于考虑到多关节型搬运机械手的驱动力因素,所以,后三个自由度采用液压驱动装置,以此实现多关节型搬运机械手在满足定位精确的前提下,还能保证较高的驱动强度,使多关节型搬运机械手可以满足各种特殊操作的实际需要。
多关节型搬运机械手在设计过程中,其基础部件构成分别为基座、手臂、电机、立柱、末端执行器、后壳体、小臂俯仰电机、腰部回转电机、盖板、腕部回转液压缸[2]。
基于小型多关节工业机器人设计讨论
基于小型多关节工业机器人设计讨论基于多关节协同下的小型机器人经由直接驱动,电机衔接着摆线装置、谐波减速特有的装置。
在最大范畴内缩减了差值,调动多重关节。
机器关节配有关联的支撑,包含回转导轨。
增设了高精度,滚柱轴承增添了固有的精度特性,包含十字交叉。
在这种搭配下,维持了应有的关节灵活,重复精度定位。
搭配各类附件,吻合了自动架构下的物流装配,适宜自动生产。
因此本文基于小型多关节工业机器人设计展开了讨论。
标签:小型;多关节;工业机器人;设计1、小型多关节工业机器人特点1.1控制系统高柔性将工业机器人控制系统按“工业机器人群”考虑,其控制既能适应群体系统控制,也能保证各独立工业机器人之间的协调配合,同时每个独立工业机器人的控制方式和结构,能方便地实现与其他工业机器人或自动生产线的连接及通信。
独立工业机器人的控制从系统的角度出发,使之具有与其他工业机器人与设备的互联和协调的工作能力,以工程数据库和现场总线网络为支撑技术,规划好数据结构、通信协议及各种规范的软硬件接口,所有控制软件采用模块化设计技术,增强控制系统的柔性和适应性。
1.2高精度工业机器人性能主要指标有工业机器人各关节的传动平稳性、重复定位精度等,在小型多关节装配工业机器人本体结构设计中,突破机械传统设计观念,采用大减速比高精度的摆线减速机,通过伺服电动机直接与摆线减速机相联接,驱动工业机器人关节运动,改善工业机器人原有的传动链长,传动结构复杂,传动误差大的缺点。
小型多关节工业机器人采用自制复合型、高精度十字交叉滚子轴承,因轴承中圆柱滚子在呈90°的V形沟槽滚动面上相互垂直的排列,轴承可承受径向负荷、轴向负荷及倾覆力矩等所有方向的负荷。
内外圈的尺寸最大限度地小型化,外圈采用两体分割的构造,轴承预紧量可调整,通过施加预紧负荷,而获得高刚性、高精度,轴承回转、轴向跳动精度不大于±0.01mm。
该轴承应用于工业机器人的关节回转部位,从而缩小工业机器人关节支撑件安装空间及简化支撑结构,提高工业机器人传动刚性及运动几何精度。
机器人实习总结
机器人实习总结工业机器人是面向工业领域的多关节机械手或多自由度的机器人。
工业机器人是自动执行工作的机器装置,是靠自身动力和控制能力来实现各种功能的一种机器。
它可以接受人类指挥,也可以按照预先编排的程序运行,现代的工业机器人还可以根据人工智能技术制定的原则纲领行动。
目录历史沿革主要特点组成结构发展前景收缩展开历史沿革19捷克作家卡雷尔・查培克在其剧本《罗萨姆的万能机器人》中最早使用机器人一词,剧中机器人“Robot”这个词的本意是苦力,即剧作家笔下的一个具有人的外表、特征和功能的机器,是一种人造的劳力。
它是最早的工业机器人设想。
20世纪40年代中后期,机器人的研究与发明得到了更多人的关心与关注。
50年代以后,美国橡树岭国家实验室开始研究能搬运核原料的遥控操纵机械手,如图0.2所示,这是一种主从型控制系统,主机械手的运动。
系统中加入力反馈,可使操作者获知施加力的大小,主从机械手之间有防护墙隔开,操作者可通过观察窗或闭路电视对从机械手操作机进行有效的监视,主从机械手系统的出现为机器人的产生为近代机器人的设计与制造作了铺垫。
1954年美国戴沃尔最早提出了工业机器人的概念,并申请了专利。
该专利的要点是借助伺服技术控制机器人的关节,利用人手对机器人进行动作示教,机器人能实现动作的记录和再现,这就是所谓的示教再现机器人。
现有的机器人差不多都采用这种控制方式。
1959年第一台工业机器人在美国诞生,开创了机器人发展的新纪元。
工业机器人在工业生产中能代替人做某些单调、频繁和重复的长时间作业,或是危险、恶劣环境下的作业,例如在冲压、压力铸造、热处理、焊接、涂装、塑料制品成形、机械加工和简单装配等工序上,以及在原子能工业等部门中,完成对人体有害物料的搬运或工艺操作。
20世纪50年代末,美国在机械手和操作机的基础上,采用伺服机构和自动控制等技术,研制出有通用性的独立的工业用自动操作装置,并将其称为工业机器人;60年代初,美国研制成功两种工业机器人,并很快地在工业生产中得到应用;1969年,美国通用汽车公司用21台工业机器人组成了焊接轿车车身的自动生产线。
多关节通用机械臂设计
摘要摘要随着现代科学技术的发展,机器人技术越来越受到广泛关注,在工业生产日益现代化的今天,机器人的使用变得越来越普及。
因此对于机器人技术的研究也变得越来越迫切,尤其是工业机器人方面。
本文作者在搜集了国内外机器人相关资料的基础上,选择了国内外各生产厂商的机械臂作为参考,设计了一款拥有5个自由度的机械臂。
该机械臂由多个系统组成,包括机电系统,液压系统和传动系统。
本人绘制了机械臂的相关原理图和零件图。
本机械臂的特点是传动简单,维护方便,可用于工业生产当中各种物件的搬运,用途广泛。
关键词工业机器人;多关节机械臂;5自由度;液压系统燕山大学本科生毕业设计(论文)AbstractWith the development of modern science and technology, robot technology has become more and more attention, in today's increasingly modernized industrial production, the use of robots is becoming more and more popular. So for the robot technology research has become more and more urgent, especially for industrial robots. Robot at home and abroad in this article the author collected the relevant data, on the basis of domestic and foreign various manufacturers of mechanical arm as the reference, design a model with five degrees of freedom mechanical arm. The mechanical arm is composed of several systems, including mechanical and electrical system, hydraulic system and transmission system. I draw the related principle of mechanical arm and part drawing. Transmission characteristics of this manipulator is simple, maintenance is convenient, can be used in the industrial production of a variety of objects carrying, wide range of uses.Keywords industrial robot;Multi-joint robotic arm;5 degrees of freedom;The hydraulic system目录摘要 (I)Abstract ................................................................................................................ I I 第1章绪论.. (1)1.1课题背景 (1)1.1.1机械臂的发展 (3)1.1.2 国内外机器人研究现状 (5)1.1.3机械臂技术的要素 (7)1.1.4研究主要成果 (8)1.1.5发展趋势 (10)1.1.6 工业机器人研究意义 (10)1.2本章小结 (11)第2章机械臂总体方案设计 (12)2.1机器人机械设计的特点 (12)2.1.1 与机器人有关的概念 (13)2.1.2机器人学的基本术语 (15)2.1.3机器人的规格 (15)2.1.4机器人的分类 (16)2.2设计方案 (17)2.2.1方案要求 (17)2.2.2方案的功能设计与分析 (18)2.3本章小结 (19)第3章机械臂总体结构设计 (20)3.1腰部回转总体结构设计 (20)3.2大臂回转结构设计 (21)3.3小臂回转机构设计 (22)3.4大臂及其内部总体结构的布局 (22)3.5本章小结 (23)第4章机械臂液压缸尺寸设计 (24)4.1回转缸尺寸设计与校核 (24)4.1.1回转缸转动时所需的驱动力矩 (24)4.1.2回转缸的尺寸及其校核 (25)4.2伸缩缸设计 (27)4.2.1导向装置 (27)4.2.2伸缩缸的尺寸设计及校核 (27)4.3本章小结 (28)结论 (29)参考文献 (30)致谢 (31)附录1开题报告 (32)附录2文献综述 (38)附录3外文翻译 (44)第1章绪论1.1 课题背景工业机器人,一般指的是在工厂车间环境中,配合自动化生产的需要,代替人来完成材料或零件的搬运、加工、装配等操作的一种机器人。
多关节机械手臂系统设计
摘要机器人是近30年来发展起来的一种高科技自动化生产设备。
机械手是机器人的一个重要分支。
它的特点是可通过变成完成各种预期的作业任务,在构造和性能上兼有人和机器各自的优点,尤其是体现了人的智能和适应性,机器作业的准确性和在各种环境完成作业的能力。
本设计完成了多自由度关节式机械手的运动方案设计和驱动方式选择,并对机座,手臂及末端执行器等机械装置进行了结构设计[8]。
机械手的迅速发展是由于它的积极作用正日益为人们所认识。
其一,它能迅速地代替人完成某些操作;其二,它能按照生产工艺的要求,遵循一定的程序、时间和位置要求来完成工件的传送和装卸;其三,它能操作某些必要的机具进行焊接和装配,从而大大改善工人的劳动条件,显著地提高劳动生产率,加快实现工业生产机械化和自动化的步伐,因而受到各先进国家的重视,都投入大量的人力和物力去研究和开发[4]。
在高温、高压、粉尘浓度高、严重噪音以及带有放射性和化学污染的场合应用的尤为广泛。
在我国,近几年也有较快的发展,并取得了一定的成效,受到机械工业和铁路工业部门的重视[6]。
关键词:机械手,电驱动,嵌入式控制ABSTRACTThe robot is a high-tech automated production equipment developed in recent 30 years. Manipulator is an important branch of robot. It is characterized by a complete tasks in a variety of expectations, in the structure and performance of both people and machines to their respective advantages, especially reflected people's intelligence and adaptability, accuracy of machine operation and finish the homework in a variety of environmental capacity. Completed the design of multi degree of freedom motion scheme of articulated manipulator design and driving mode selection, and on the base, mechanical arm and end effector for the structure design of [8].The rapid development of the manipulator is due to its positive role is increasingly recognized. First, it can quickly replace man to complete some operations; secondly, it can be in accordance with the requirements of the production process, follow certain procedures, time and location requirements to complete the transfer and handling of the workpiece; thirdly, it can operate some necessary equipment for welding and assembly, thus greatly improving working conditions, significant to improve labor productivity, accelerate the realization of industrial production mechanization and automation pace, and thus have the advanced national attention, have invested a lot of manpower and material resources to research and development of[4]. In the high temperature, high pressure, high dust concentration, serious noise as well as the application of radioactive and chemical pollution situation is particularly widespread. In our country, in recent years have rapid development, and achieved certain results, by the machinery industry and railway industry attention [6].Key words:Mechanical arm,Electrically driven,Embedded control目录1 绪论 (1)2 机械臂结构部分设计 (4)2.1 小臂部分 (4)2.2大臂部分 (17)2.3腰部部分 (26)2.3手腕部分 (35)3 电路控制部分设计 (45)3.1 单片机的概念 (45)3.2单片机特点 (46)3.3AT89C51单片机简介 (47)3.4单片机设计相关 (48)3.5机械手控制程序编写 (48)4 结论 (51)5 参考文献 (52)6 致谢 (51)1 绪论机械手的发展历史是相当长的,19世纪40年代出现的原子能用机械手就是其历史的开端。
水平多关节型工业机器人设计—机身与大臂结构及控制系统设计
长春工程学院毕业设计(论文)摘要工业机器人没有明确界线,它包罗多门学科,涉及多方领域,包含有机械学、控制理论学和仿生学等。
而水平多关节型工业机器人的研发更是行业内热点,它囊括机构学、控制理论和技术、计算机、传感技术、人工智能、仿生学等。
工业机器人的应用情况,象征着一个国家的工业自动化程度。
本设计要求对机器人的总体结构中机身与大臂部分与控制系统进行设计,完成装配图和零件图的绘制。
对机器人本体的各个零件进行受力分析,对各个关节需要转矩和功率进行初步的计算,选择满足要求的电动机作为动力装置。
其次考虑电动机与传动装置连接,选取合适传动方式,并对传动中的零件进行计算校核。
控制系统部分选用MCS-51单片机控制,按照预设的指令完成相应的动作。
关键词机身;大臂;控制系统AbstractThere is no clear boundary between industrial robots. It covers many disciplines and involves many fields, including mechanics, control theory and bionics.Each joint are required to be preliminary calculated, and the motor that meets the requirements is selected as the power device. Secondly, consider the connection between the motor and the transmission device, select the appropriate transmission mode, and calculate and check the parts in the transmission. The control system part is controlled by MCS-51 single-chip microcomputer, and the corresponding action is completed according to the preset instruction.Keywords:Keywords:Fuselage;Boom ;Control Systems目录1. 前言 (1)1.1 课题来源及研究意义 (1)1.2 国内、外发展状况 (1)1.2.1 国内发展状况 (1)1.2.2 国外发展状况 (2)1.3 设计任务的主要内容与要求 (3)1.3.1 设计内容 (3)1.3.2 设计要求 (3)1.4 设计的主要技术指标和参数 (3)2. 工业机器人工程概述 (4)2.1 工业机器人应具备的系统功能 (4)2.2 工业机器设计中总体方案的论证 (4)2.2.1 确定负载 (4)2.2.2 驱动方式 (4)2.2.3 传动系统设计 (4)2.2.4 工作范围 (4)2.2.5 运动速度 (5)2.3 机器人机械传动原理 (5)3. 机械部分的结构设计与计算 (6)3.1 机身部分结构设计 (6)3.2 大臂的结构设计 (6)3.3 机械部分设计计算 (7)3.3.1 选择电动机...................................... 错误!未定义书签。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
多关节机器人设计总结
多关节机器人是一种能够模拟人类手臂和腿部运动的机器人。
它们通常由多个关节和执行器组成,能够实现复杂的运动和灵活的姿态控制。
多关节机器人在工业、医疗、服务等领域中具有广泛的应用前景。
第一部分:多关节机器人的基本概念和结构
多关节机器人是一种模仿人类手臂和腿部结构的机器人。
它由多个关节连接而成,每个关节都有自己的执行器和传感器。
通过控制关节的运动,多关节机器人可以实现各种复杂的动作和姿态。
多关节机器人的结构通常包括机械结构、传感器、执行器和控制系统。
机械结构是机器人的骨架,它由多个关节和连接件组成。
传感器用于感知机器人周围的环境和自身状态,常用的传感器包括位置传感器、力传感器和视觉传感器。
执行器是机器人关节的驱动装置,常用的执行器包括电机和液压缸。
控制系统则负责监控和控制机器人的运动,使其按照预定的轨迹和姿态执行任务。
第二部分:多关节机器人的应用领域
多关节机器人在工业领域中有广泛的应用。
它们可以承担一些重复性、危险或高精度的工作,如焊接、装配、搬运等。
多关节机器人的灵活性和精准性使其在工业生产中能够发挥重要作用,提高生产效率和质量。
多关节机器人也在医疗领域中得到广泛应用。
它们可以用于手术辅助、康复训练、病人护理等方面。
多关节机器人的精准控制和灵活性使其能够执行复杂的手术操作,减少手术风险和创伤。
同时,多关节机器人还可以用于康复训练,帮助患者恢复运动功能。
多关节机器人还可以用于服务领域,如家庭服务和社会服务。
它们可以承担一些繁重的家务劳动,如打扫、煮饭等。
多关节机器人的灵活性和智能化使其能够适应不同的环境和任务,提供个性化的服务。
第三部分:多关节机器人的挑战和发展趋势
多关节机器人的设计和控制面临着一些挑战。
首先,多关节机器人的结构复杂,需要高度精确的运动控制。
其次,多关节机器人需要具备感知和决策的能力,使其能够适应不同的环境和任务。
此外,多关节机器人的安全性和可靠性也是设计和控制的重要考虑因素。
未来,多关节机器人的发展趋势主要体现在以下几个方面。
首先,多关节机器人将更加注重智能化和自主性。
它们将具备感知、决策和学习的能力,能够适应不同的环境和任务。
其次,多关节机器人将更加注重人机协同和交互。
它们将能够与人类进行自然而直观的交互,实现更高效、安全和舒适的合作。
最后,多关节机器人的结构和材料将更加轻量化和柔性化。
它们将具备更好的机动性和适应性,能够适应复杂多变的工作环境。
总结:
多关节机器人是一种能够模拟人类手臂和腿部运动的机器人,具有广泛的应用前景。
它们的设计和控制面临着一些挑战,但随着技术的不断发展,多关节机器人将越来越智能化、灵活化和安全可靠。
未来,多关节机器人有望在工业、医疗、服务等领域中发挥更重要的作用,为人类带来更多的便利和福祉。