多关节SCARA四轴机器人
scara四轴机器人丝杆原理
scara四轴机器人丝杆原理概述:scara四轴机器人丝杆原理,是一种机器人操作原理,它是四至机器人中最具代表性的,由于它的机械结构设计独特,它可以提供优秀的性能。
scara四轴机器人可以实现多轴控制运动,具有高精度、高速度、高可靠性等优点,广泛应用于工业制造领域。
一、scara四轴机器人原理的基础scara四轴机器人采用的是丝杆驱动原理,丝杆驱动原理是指通过螺纹副转动螺旋摆杆和丝杆,在两者之间产生相对运动,从而控制机器人的运动、位置和方向。
二、scara四轴机器人中丝杆的角色丝杆是scara四轴机器人中非常重要的一个部件,它的主要角色是将电机产生的回转运动转化为直线运动,从而控制机器人的运动、位置和方向。
通过丝杆的运动,机器人可实现高精度的位置控制。
三、scara四轴机器人丝杆的工作原理机器人的工作原理是由电脑控制驱动输出电的结果,电机转动带动丝杆旋转,丝杆通过固定在螺旋摆杆上的丝杆螺母,将旋转运动转化为直线运动,最终控制机器人的运动、位置和方向。
四、scara四轴机器人丝杆的特点1.高精度:丝杆驱动机构能实现精度高达0.001mm的位置控制。
2.高效率:丝杆驱动机构运动效率高,能够实现快速、精确的位置控制。
3.稳定性高:丝杆驱动机构可以提供稳定的直线运动,防止机器人出现重复误差。
4.结构简单:丝杆驱动机构结构简单,不需要额外的传动机构。
五、scara四轴机器人中丝杆的发展趋势目前,丝杆驱动机构已经逐渐成为scara四轴机器人运动控制的主流方式,未来它仍将继续保持这个趋势。
同时,随着机器人技术的不断发展,丝杆驱动机构的精度、稳定性和性能也会不断提高,将在更多的领域得到应用。
总之,scara四轴机器人丝杆原理是机器人技术中不可或缺的一部分,其优点在机器人制造中扮演着重要的角色。
相信随着技术的不断发展,scara四轴机器人的丝杆驱动机构将变得更加高效、精准和高品质。
scara四轴轨迹算法
Scara四轴轨迹算法是一种用于计算机器人手臂关节角度的方法,可以用于实现机器人的路径规划和运动控制。
Scara四轴轨迹算法的基本思想是将机器人的关节角度表示为时间的函数,通过给定的起始关节角度、目标关节角度和运动时间,计算出机器人手臂在运动过程中的每一个关节角度。
具体来说,Scara四轴轨迹算法可以通过以下步骤实现:
1. 设定起始关节角度(q1_start)、目标关节角度(q1_goal)和运动时间(t)。
2. 设定机器人的臂长(L1和L2)和高度偏移(D)等参数。
3. 根据Scara四轴轨迹公式,计算出机器人手臂在运动过程中的每一个关节角度。
4. 控制机器人按照计算出的关节角度进行运动,实现机器人的路径规划和运动控制。
需要注意的是,Scara四轴轨迹算法是一种基于物理模型的轨迹规划方法,其计算结果受到机器人物理性能和运动环境等因素的影响。
因此,在实际应用中,需要结合机器人的实际性能和环境条件进行调整和优化。
SCARA机器人十大品牌

食品包装
医疗行业
SCARA机器人用于食品包装行业,如装箱 、封口、贴标等环节。
SCARA机器人在医疗行业中也有应用,如 手术辅助、医疗器械操作等。
02
CATALOGUE
SCARA机器人品牌排名及介绍
排名依据
01
02
பைடு நூலகம்
03
04
市场份额
根据各品牌在全球SCARA机 器人市场的占有率和销售额进
行评估。
技术实力
综合考虑各品牌的研发能力、 技术创新能力以及产品性能等
因素。
客户口碑
基于客户对各品牌SCARA机 器人的使用体验和满意度进行
评价。
行业地位
各品牌在行业内的知名度、影 响力以及在市场中的竞争力。
品牌一:FANUC
FANUC是日本一家知名的工业机器人制造商,其SCARA机器人在全球范围内具有较 高的市场份额。
KUKA提供全面的售后服务和 客户支持,帮助客户解决各种 问题并提高生产效率。
品牌四:OTC
OTC是日本一家专业的工业机器 人制造商,其SCARA机器人在全
球范围内拥有广泛的应用。
OTC的SCARA机器人以高精度和 高稳定性为特点,适用于各种装
配、搬运和焊接等生产流程。
OTC提供全面的售后服务和客户 支持,帮助客户解决各种问题并
主要应用领域市场占比
电子行业
SCARA机器人在电子行业中的应 用占比最大,主要应用于表面贴
装、半导体制造等领域。
汽车行业
SCARA机器人在汽车行业中的应 用占比位居第二,主要应用于汽
车零部件的加工和装配。
食品行业
SCARA机器人在食品行业中的应 用占比相对较小,但随着食品安 全问题的日益突出,SCARA机器 人在食品加工和包装领域的应用
scara机器人工作原理
scara机器人工作原理首先,选择性柔性组装意味着Scara机器人在进行组装任务时具有其中一种程度的灵活性和自适应能力。
它可以根据任务的需要进行不同的动作和位置调整,以适应不同的工件形状和尺寸。
与传统的刚性组装机器人相比,Scara机器人能够更好地适应多样化的组装任务。
其次,Scara机器人的运动控制是通过控制四个关节实现的。
这四个关节包括两个旋转关节和两个平移关节,它们分别控制机械臂在水平和垂直方向的移动。
这种运动控制结构使得机械臂能够在二维平面内进行多种动作和运动轨迹,例如直线轨迹、圆弧轨迹和螺旋轨迹等。
具体来说,Scara机器人的工作原理涉及以下几个方面:1. 动力系统:Scara机器人通常由电机驱动,其中每个关节都有一个电机来控制它的运动。
电机可根据用户指令在特定角度范围内旋转,控制机械臂的运动。
2. 控制系统:Scara机器人的控制系统由一个中央控制器和多个传感器组成。
中央控制器负责处理和执行用户输入的指令,控制机械臂的运动。
传感器可用于获取环境信息和机械臂状态,以实现精确的定位和运动控制。
3. 运动规划:在执行组装任务之前,Scara机器人需进行运动规划,即确定机械臂的运动轨迹和动作顺序。
根据用户输入的组装要求和环境条件,机器人会通过算法计算出最佳的运动轨迹,以实现高效的组装任务。
4.动作执行:一旦运动规划完成,机器人就会根据计算出的运动轨迹执行动作。
它会根据指令将各个关节移动到相应的位置和角度,以完成特定的组装任务。
需要注意的是,Scara机器人通常用于装配和组装任务,例如在电子元件装配、制造业、医疗设备等领域。
机器人的机械结构和运动控制设计使其能够在狭小的工作空间内进行高精度的组装操作。
此外,Scara机器人还可以与其他自动化设备和系统集成,以实现更高级别的自动化生产。
例如,它可以与视觉系统和传输带等设备配合使用,实现自动检测、定位和传送工件,提高生产效率和质量。
总结起来,Scara机器人的工作原理基于选择性柔性组装和运动控制的基本原则,通过动力系统、控制系统、运动规划和动作执行等步骤,实现高精度、高效率的装配和组装任务。
关节机器人技术参数

关节机器人技术参数关节机器人是一种具有多个自由度关节的机器人系统,可以实现各种复杂的动作和任务。
关节机器人的技术参数包括机器人的结构、轴数、负载能力、精度、速度、重复定位精度等多个方面。
下面将详细介绍关节机器人的技术参数。
1. 结构:关节机器人通常采用多关节链结构,每个关节链包含一个或多个关节。
常见的关节机器人结构包括SCARA、轴坐标、直线、Delta 等。
不同的结构适用于不同的应用场景,可以实现不同类型的运动和操作。
2.轴数:关节机器人的轴数指机器人的自由度,也就是机器人可以控制的关节数量。
一般来说,轴数越多,机器人的灵活性和精度越高。
常见的关节机器人轴数有3轴、4轴、6轴、7轴等,不同的轴数适用于不同的应用需求。
3.负载能力:关节机器人的负载能力是指机器人可以承载的最大重量。
负载能力通常包括负载的重量和对应的工具重量,对于不同的应用场景,需要根据具体需求选择合适的负载能力的机器人。
4.精度:关节机器人的精度是指机器人在执行任务时的定位精度和重复定位精度。
定位精度是指机器人执行特定动作时达到的目标位置的精度,重复定位精度是指机器人多次执行同一动作时达到的目标位置的一致性。
精度是衡量机器人性能的重要指标,对于高精度的应用场景,需要选择精度更高的关节机器人。
5.速度:关节机器人的速度是指机器人执行任务时的最大运动速度。
速度对于一些需要高效执行任务的应用场景至关重要,速度越快,机器人的生产效率越高。
不同的关节机器人具有不同的速度范围,需要根据具体需求选择适合的机器人速度。
6.重复定位精度:重复定位精度是指机器人重复执行同一动作时对目标位置的一致性。
在实际生产中,需要保证机器人能够稳定地重复执行任务,具有良好的重复定位精度是关节机器人的重要性能指标之一总之,关节机器人的技术参数包括结构、轴数、负载能力、精度、速度、重复定位精度等多个方面,不同的参数对于机器人的性能和应用场景有着重要的影响。
在选择关节机器人时,需要根据具体的应用需求和技术要求综合考虑各项技术参数,以确保机器人能够满足任务的要求并提高生产效率。
SCARA机器人

四自由度SCARA型教学机器人
串联式机器人是一种典型的工业机器人,在自动 搬运、装配、焊接、喷涂等工业现场中有着广泛 的应用,通过该系列教学机器人可使学生能够模 拟工业现场的实际运行状况。结构紧凑,工作范 围大,具有高度的灵活性,是进行运动规划和编 程系统设计的理想对象
TX90 6轴机器人
TX90机器人采用6个自由 度的多关节机械手臂,具 高度灵活性。球形工作区 域可以最大限度地利用工 作单元空间。置地式,壁 挂式,置顶式多种安装方 式可选,满足差异化需求。 全封闭式的机械臂结构 (防护等级IP65)适用于 严苛的环境中。
SCARA 机器人应用实例
SCARA式教学机器人
★SCARA式教学机器人是四自由度机器人,它 是一个多输入多输出的动力学复杂系统, 是进行控制系统设计的理想平台; ★它具有高度的能动性和灵活性,具有广阔 的可达空间,是进行运动规划和编程系统 设计的理想对象。除教学和培训外,SCARA 式教学机器人还可用于细小零件的搬运和 电子元件的装配等工业作业。
多关节机器人手臂SCARA
多关节机器人手臂SCARA可以应用于需要高效率的 装配、焊接、密封、搬运和拿放等众多应用,具 有高刚性、高精度、高速度、安装空间小、设计 自由度大的优点。它比多轴定位平台的工作循环 时间短很多,大大提高了工作效率。由于组成的 部件少,因此工作更加可靠,减少维护。此外还 有吸顶和倒置安装型,方便安装于各种空间。它 们具有绝对位置记忆,无需原点返回操作,节省 了时间。您可以用它们直接组成为焊接机器人、 点胶机器人、光学检测机器人、拿放机器人、插 件机器人等,效率极高,占地还小,基本免维护。
SCARA机器人本体结构
★操作机:由臂,关节和末端执行装置构成,是机器人 完成作业的实体,具有和人手臂相似的功能,可在 空间抓放物体或进行其它操作 ★驱动单元:由驱动器,减速器,检测元件等组成 ★控制装置:包括检测(如传感器)和控制(如计算机) 两部分,可用来控制驱动单元,检测其运动参数是 否符合规定要求,并进行反馈控制 ★人工智能系统:主要由两部分组成,一部分为感觉 系统(硬件),主要靠各类传 感器来实现其感觉功 能.
scara四轴机器人丝杆原理
scara四轴机器人丝杆原理
SCARA机器人的全称是Selective Compliance Assembly Robot Arm,即“有选择的柔性装配机器人臂”,是一种非常常见的工业机器人。
它的主要特点是具有非常高的重复定位精度和柔性的装配能力,可以适应各种不同的装配任务。
SCARA机器人的丝杆原理是指,它通过丝杠传动系统来实现机械臂的运动和定位控制。
具体来说,SCARA机器人的机械臂由多个关节组成,每个关节都有一个电机和一个丝杠传动系统。
通过控制电机的旋转方向和速度,可以实现机械臂的运动。
同时,丝杠传动系统可以提供非常高的精度和稳定性,保证机械臂的定位精度。
SCARA机器人的丝杆传动系统有两种常见的形式,一种是直线丝杠传动,另一种是旋转丝杠传动。
直线丝杠传动是指丝杠和导轨平行排列,通过螺母的滑动来实现机械臂的运动。
这种传动方式具有非常高的精度和刚性,适用于需要高精度定位的装配任务。
旋转丝杠传动是指丝杠和电机轴线垂直排列,通过丝杠的旋转来实现机械臂的运动。
这种传动方式具有较高的速度和灵活性,适用于需要高速装配的任务。
总的来说,SCARA机器人的丝杠原理是通过丝杠传动系统来实现机械臂的运动和定位控制,具有高精度、高刚性、高速度和灵活性的特点,适用于各种不同的装配任务。
scara机器人工作原理
scara机器人工作原理Scara机器人是一种常见的工业机器人,其工作原理是通过运动控制系统控制其机械臂的运动,以完成各种任务。
Scara机器人的机械臂通常由多个关节组成,每个关节都可以通过电机、编码器、减速器等装置来控制其运动。
机械臂的各个部件通过连杆连接,在关节处进行旋转运动,并通过关节间的连杆来传递力量。
机械臂的末端通常安装有工具或末端执行器,用于完成具体的任务,如组装、搬运、焊接等。
Scara机器人的运动控制系统主要包括传感器、控制器和执行器。
传感器用于感知环境和机器人自身状态的变化,例如光电传感器、力传感器、视觉传感器等。
控制器是机器人的大脑,通过收集传感器信息、处理算法和控制指令,来实现对机器人的精准控制。
执行器根据控制器的指令,控制机械臂的运动,以实现各种任务。
Scara机器人的运动控制通常遵循几个基本原则,包括运动规划、路径插补、运动控制和优化算法等。
运动规划是指在给定任务的条件下,根据机器人的动力学和几何学模型,确定机械臂的运动轨迹和关节角度。
路径插补是指在确定了运动轨迹后,根据机器人的运动特性,在轨迹上插入合适的点,使机器人能够平稳地运动。
运动控制是指对机械臂的运动进行实时控制,保证机器人按照预定轨迹和速度进行运动。
优化算法是指通过对机器人系统的建模和参数调整,来达到最佳的性能指标,如运动速度、精度、稳定性等。
Scara机器人的工作过程通常包括以下几个步骤:首先,通过传感器获取环境和机器人自身状态的信息;然后,根据任务要求和环境要素,确定机器人的运动路径和关节角度;接下来,进行路径插补和运动控制,使机械臂能够按照预定轨迹和速度平稳地运动;最后,通过执行器控制机械臂完成具体的工作任务。
Scara机器人具有许多优点,例如精度高、重复性好、速度快、可编程性强等。
它在汽车制造、电子组装、食品加工等领域广泛应用,能够提高生产效率和质量,减少人工劳动强度和生产成本。
总之,Scara机器人通过运动控制系统实现对机械臂的精准控制,以完成各种工作任务。
SCARA工业机器人设计
SCARA工业机器人设计Scara是一种四自由度机器人,用来处理需要水平和垂直运动的任务。
它是一个广泛应用于工业生产线的机器人,具有高精度和高稳定性的特点。
本文将重点介绍SCARA工业机器人的设计。
首先,SCARA机器人由基座、纵臂、横臂和末端执行器组成。
基座是机器人的固定部分,提供了机器人的稳定性和支撑。
纵臂连接在基座上,并可实现竖直方向的运动。
横臂连接在纵臂上,并可实现水平方向的运动。
末端执行器则连接在横臂上,用来完成具体的操作任务。
其次,SCARA机器人的设计需要考虑的因素很多。
首先是机器人的精度要求。
由于SCARA机器人广泛应用于装配和加工领域,因此精度是一个非常重要的考虑因素。
在机器人的设计过程中,需要选择合适的驱动系统和传感器来保证机器人的精度。
其次是机器人的工作范围。
SCARA机器人的工作范围决定了它能够处理的具体任务。
在设计过程中,需要根据实际需求来确定机器人的工作范围,并选择合适的机械结构和控制系统来实现。
此外,机器人的稳定性也是一个重要考虑因素。
特别是在高速运动或负重任务中,机器人的稳定性对于保证机器人的正常工作非常重要。
在设计过程中,需要选择合适的结构和材料来提高机器人的稳定性。
最后,SCARA机器人的设计还需要考虑机器人的控制系统。
机器人的控制系统决定了机器人能够完成的任务和运动方式。
在设计过程中,需要选择合适的控制系统和编程工具来实现机器人的自动化操作。
综上所述,SCARA工业机器人的设计需要考虑精度、工作范围、稳定性和控制系统等多个因素。
在设计过程中,需要综合考虑这些因素,并选择合适的驱动系统、传感器、机械结构和控制系统来实现机器人的设计需求。
随着工业自动化的不断发展,SCARA工业机器人将会在更多领域发挥重要作用。
SCARA四轴机器人

短马达的采用与电缆线设计,在高度上成为 同行业中最低的机种,提高了系统设计的自由度
YAMAHA SCARA XG机器人的构造長処
与以前的机种比较 高精度化 高速度化 高耐久性。
而且,部品数的减少,
大大降低了成本。
超小型水平多关节机器人Tiny系列
YK120/150XG 负载1kg(Z=50mm)
YAMAHA最小机种。 适应于微小产品的搬运等。
YK180/220X 负载1kg(Z=100mm)
不但小型且可确保刚性。 实现了作业空间的有效利用与周 期时间缩短
以上两种规格都采用了无皮带传动构造 实现了小型、高精度、持久性
超小型水平多关节机器人Tiny系列
YK120/150/180XG ,YK180/220X
构造
YAMAHA的以前
Z軸马达
皮帯
其他公司的構造
現在YAMAHA的XG構造
Ball screw-Ball spline
Ball screw
Z軸Motor
空心R軸马达
Ball spline
皮帯
ቤተ መጻሕፍቲ ባይዱ
R軸马达 皮帯
皮帯
R軸Motor
R軸減速机
空心Z軸马达
YAMAHA的构造実現簡易示和 良好Z动作在插补移动。
XY 4.9m/sec
7.6m/sec
45%向上
1.7m/sec
Z
2.3m/sec
876deg/sec
R
1700deg/sec
35%向上 90%向上
・手臂基板采用优质的挤压成形铝合金
根据优质铝合金的采用与构造解析,与以前的机种 相比,实现了高刚性化。 此外,与以前使用的铸造零部件相比,降低了成本, 实现了低成本化。
scara机器人动力学参数
scara机器人动力学参数SCARA机器人是一种经典的工业机器人,其机械结构简单,控制灵活,广泛应用于装配、搬运和焊接等工业领域。
了解和掌握SCARA机器人的动力学参数对于设计、运动控制和路径规划非常重要。
本文将详细介绍SCARA机器人的动力学参数。
1.结构参数SCARA机器人的结构包括基座、立杆、横梁和手腕。
基座用于支撑机器人的整个结构,立杆和横梁确定机器人的工作空间,手腕用于控制末端执行器的运动。
这些结构参数决定了机器人的可工作空间大小和负载能力。
2.接触参数机器人的接触参数包括机器人末端执行器和工件之间的接触摩擦力。
这些参数影响机器人的搬运能力和运动精度。
通常,在设计机器人的时候需要考虑到这些参数,并根据工作需求来选择合适的末端执行器。
3.负载参数SCARA机器人的负载参数包括负载质量和负载中心位置。
负载质量决定了机器人的最大负载能力,而负载中心位置决定了机器人在运动中所承受的载荷分布。
在进行机器人的动力学分析和路径规划时,需要精确测量和确定这些负载参数。
4.关节参数SCARA机器人一般由多个关节构成,每个关节都有自己的参数。
这些关节参数包括关节的位置、尺寸和惯性矩阵等。
这些参数影响机器人的运动灵活性和控制精度。
在进行机器人的动力学建模和仿真时,需要准确测量和确定这些关节参数。
5.运动参数SCARA机器人的运动参数包括关节角度、关节速度和关节加速度等。
这些参数描述了机器人在运动过程中的位置、速度和加速度变化。
了解和掌握这些运动参数对于机器人的运动控制和路径规划非常重要。
SCARA机器人的动力学参数包括质量矩阵、惯性矩阵和重力矩阵等。
质量矩阵描述了机器人每个关节的质量分布情况,惯性矩阵描述了机器人每个关节的惯性分布情况,重力矩阵描述了机器人在地球重力下所受到的力和矩。
在进行机器人的动力学分析和路径规划时,需要准确测量和确定这些动力学参数。
总结:了解和掌握SCARA机器人的动力学参数对于设计、运动控制和路径规划非常重要。
Scara机器人技术规格20141130
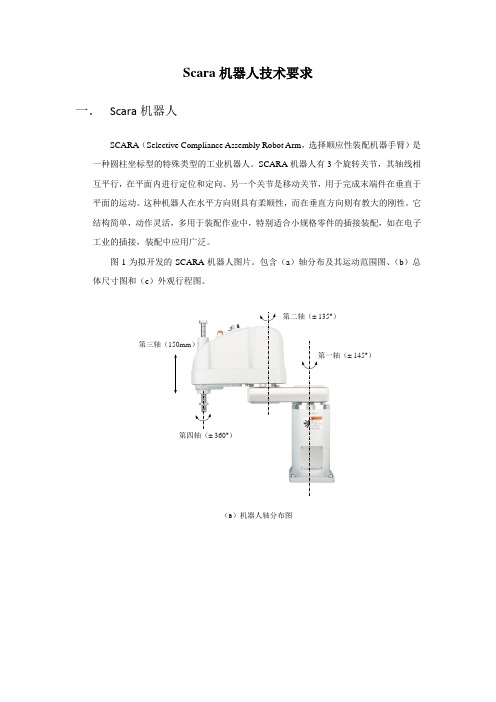
Scara 机器人技术要求一. Scara 机器人SCARA (Selective Compliance Assembly Robot Arm ,选择顺应性装配机器手臂)是一种圆柱坐标型的特殊类型的工业机器人。
SCARA 机器人有3个旋转关节,其轴线相互平行,在平面内进行定位和定向。
另一个关节是移动关节,用于完成末端件在垂直于平面的运动。
这种机器人在水平方向则具有柔顺性,而在垂直方向则有教大的刚性。
它结构简单,动作灵活,多用于装配作业中,特别适合小规格零件的插接装配,如在电子工业的插接,装配中应用广泛。
图1为拟开发的SCARA 机器人图片。
包含(a )轴分布及其运动范围图、(b )总体尺寸图和(c )外观行程图。
± 145°)第二轴(± 135°)第三轴(150mm )第四轴(± 360°)(a )机器人轴分布图200mm 250mm 630m m400mm(b )机器人结构尺寸图(c )机器人外观行程图图1 SCARA 机器人图二.主要技术参数表1 Scara机器人技术参数三.应用场合∙汽车 - 镜面/玻璃装配,点火模块装配,前灯、尾灯的装配与测试,变速箱装配,离合器装配,喷油嘴装配,仪表板装配,发动机盖和行李箱锁装配∙硬盘驱动器 - 附加保护壳,光盘抛光,盒式磁带装配,高精度驱动装配∙医疗 - 手术刀刀片加工,牙科器械插入成型,起搏器电池装配,激光限线焊接,助听器装配∙实验室自动化 - 吸管包装,DNA测试排序,血液分析,试管封盖,试管处理∙消费类产品 - 家电装配,油漆刷装配,电动牙刷装配,电锯装配,扬声器制造,杂草修剪机装配,连接器装配∙工业产品 - 铸造设备加载/卸载,烟雾探测器装配,光纤连接器装配,灯泡装配,液压阀测试∙电信 - 手机装配与测试,收音机装配与测试∙制药 - 定制处方药灌装,药片包装,蛋白质晶体结构分析∙太阳能 - 面板装配∙包装 - 肉类包装,包装盒裁切和捆扎,塑料部件包装,吸管包装,产品包装∙半导体 - 定制芯片的装配和测试,线路焊接,电路板自动测试,航天电子元件装配∙食品 - 肉类处理,蔬菜采摘和切开,产品包装∙电子 - PC板检查,电路板组件自动清洗。
scara机器人动力学参数
scara机器人动力学参数
SCARA机器人是一种四自由度、二维平面构型的机器人,因此其动力学参数也比较简单,一般包括以下几种:
1.手臂长度:机器人手臂长度决定了其工作空间大小,也是机器人动力学参数中比较重要的一项参数。
2.质量分布:因为机器人在工作时需要负载,所以机器人的质量分布也是动力学参数中很关键的一项。
机器人的质心位置、各关节质量以及末端执行器的质量都是需要考虑的。
3.关节惯性:机器人的四个关节都会参与到运动中,因此各关节的惯性也需要考虑。
具体而言,需要计算出各关节的转动惯量和质心到关节轴心的距离。
4.驱动器特性:驱动器的特性是指机器人的电动机,包括电机的转矩-角度曲线、电机控制带宽以及各关节的传动机构等。
5.摩擦力:机器人运动时会产生摩擦力,这也是机器人动力学参数中需要考虑的因素之一。
这包括质量重心的摩擦力、关节之间的摩擦力、传动机构摩擦力等。
6.控制算法:最后一个动力学参数是机器人的控制算法,包括PID控制器、增益分配控制器、最优控制器等。
这些控制算法会决定机器人如何根据给定目标控制各关节,从而实现预定的运动轨迹。
4-DOF SCARA 机器人结构设计与运动模拟
摘要:工业机器人是最典型的机电一体化数字化装备,技术附加值很高,应用范围很广,作为先进制造业的支撑技术和信息化社会的新兴产业,将对未来生产和社会发展起着越来越重要的作用。
本文设计了一个工业用SCARA机器人。
SCARA机器人(全称Selectively Compliance Articulated Robot Arm)很类似人的手臂的运动,它包含肩关节肘关节和腕关节来实现水平和垂直运动。
它是一种工业机器人,具有四个自由度。
其中,三个旋转自由度,另外一个是移动自由度。
它能实现平面运动,具有柔顺性,全臂在垂直方向的刚度大,在水平方向的柔性大,广泛用于装配作业中。
本文用模块化设计方法设计了SCARA机器人的机械结构。
分析了SCARA机器人的运动学正解和逆解,建立了机器人末端位姿误差计算模型并做了运动模拟。
关键字: SCARA 位姿误差4-DOF SCARA robot design and motion simulationAbstract :Industrial robot is the most typical mechatronic digital equipment, added value and high, wide range of applications, support for advanced manufacturing technology and information society, new industries, and social development of future production will increasingly play a The more important role.This paper designs an industrial SCARA robot. SCARA robot (full name Selectively Compliance Articulated Robot Arm) is very similar to human arm movement, which includes the shoulder elbow and wrist joints to achieve horizontal and vertical movement. It is an industrial robot has four degrees of freedom. Among them, the three rotational degrees of freedom, the other is the DOF. It can achieve planar motion, with the flexibility, the whole arm in the vertical stiffness, flexibility in the horizontal direction of the large, widely used in assembly operations. This method was designed with a modular design the mechanical structure of SCARA robot. Analysis of the SCARA robot inverse kinematics, and to establish the position and orientation of robot end of the model error.Keywords: SCARA analysis毕业设计(论文)任务书I、毕业设计(论文)题目:4-DOF SCARA机器人结构设计与运动模拟II、毕业设计(论文)使用的原始资料(数据)及设计技术要求:1. 以4-DOF SCARA 机器人为研究对象,按照下列技术要求,基于三维软件完成4-DOF SCARA 机器人的结构设计及运动模拟、2、设计技术要求:(1) 抓重:≤1kg(2) 自由度:4(3) 运动参数:大臂:±100。
四轴SCARA机器人机械结构的毕业设计
详细设计、
2013.4月中旬
5
中期考核
2013.4月中旬
6
设计的细化和完善
2013.5月上中旬
7
打印论文图纸、准备毕业答辩
2013.5月下旬
8
毕业答
课题来源: 教学 科研 生产 其它
发出任务书日期:
指导教师签名:
年 月 日
教研室意见:
教研室主任签名:
年 月 日
学生签名:
2、完成毕业论文,要求正文字数不少于2万字,严格按照“本科生毕业论文(设计)撰写规范”撰写。
3、完成文献综述及英文文献的翻译工作。
毕业设计(论文)进度安排:
序号
毕业设计(论文)各阶段内容
时间安排
备注
1
课题理解、文献调研
2013.1月-2月
2
开题报告
2013.3月初
3
方案设计、实验预研
2013.3月上旬
本科毕业设计(论文)任务书
学生姓名
班级
专业
机械设计制造及其自动化
导师姓名
职称
单位
毕业设计(论文)题目
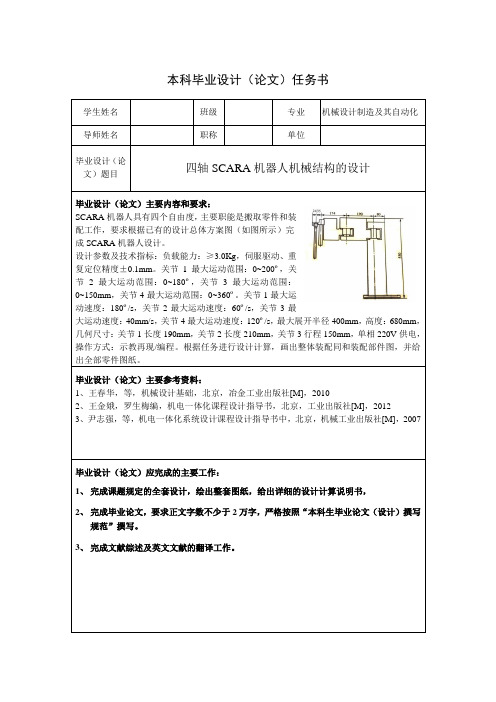
四轴SCARA机器人机械结构的设计
毕业设计(论文)主要内容和要求:
SCARA机器人具有四个自由度,主要职能是搬取零件和装配工作,要求根据已有的设计总体方案图(如图所示)完成SCARA机器人设计。
设计参数及技术指标:负载能力:≥3.0Kg,伺服驱动、重复定位精度±0.1mm。关节1最大运动范围:0~200º,关节2最大运动范围:0~180º,关节3最大运动范围:0~150mm,关节4最大运动范围:0~360º。关节1最大运动速度:180º/s,关节2最大运动速度:60º/s,关节3最大运动速度:40mm/s,关节4最大运动速度:120º/s,最大展开半径400mm,高度:680mm,几何尺寸:关节1长度190mm,关节2长度210mm,关节3行程150mm,单相220V供电,操作方式:示教再现/编程。根据任务进行设计计算,画出整体装配同和装配部件图,并给出全部零件图纸。
scara机器人应用案例
scara机器人应用案例摘要:一、SCARA 机器人概述二、SCARA 机器人的应用领域三、SCARA 机器人的具体应用案例四、SCARA 机器人的未来发展前景正文:一、SCARA 机器人概述SCARA 机器人,全称Selective Compliance Articulated Robot Arm,即选择性刚度关节式机器人手臂,是一种具有四个关节的机器人手臂。
其特点是具有较高的运动速度和较远的运动范围,能够实现在狭小空间内的快速准确操作。
SCARA 机器人广泛应用于各种自动化生产线、装配、检测、上下料等场景。
二、SCARA 机器人的应用领域1.电子行业:在电子行业中,SCARA 机器人主要用于电子产品的组装、焊接、点胶、检测等环节,如手机、平板电脑等消费电子产品的生产。
2.汽车制造业:在汽车制造业中,SCARA 机器人可以用于发动机、变速器的装配、检测,以及汽车零部件的加工等环节。
3.食品行业:在食品行业,SCARA 机器人可以完成食品的包装、分拣、搬运等任务,提高生产效率和卫生标准。
4.医药行业:在医药行业,SCARA 机器人可以用于药品的包装、分拣、仓储等环节,确保药品的安全和有效性。
三、SCARA 机器人的具体应用案例1.电子产品组装:在某电子工厂,SCARA 机器人被用于组装手机摄像头模块。
机器人可以快速准确地将摄像头模块放置在组装平台上,完成精确的焊接和组装,大大提高了生产效率和产品质量。
2.汽车零部件加工:在某汽车制造工厂,SCARA 机器人用于加工汽车发动机缸体。
机器人可以实现缸体的快速搬运、定位和加工,提高了生产效率和加工精度。
3.食品分拣:在某食品工厂,SCARA 机器人用于分拣食品。
机器人可以根据食品的种类、尺寸等信息,快速准确地将食品分拣到对应的区域,提高了分拣效率和准确性。
4.医药药品仓储:在某医药公司,SCARA 机器人用于药品的仓储和搬运。
机器人可以在保持药品整洁、安全的同时,实现药品的高效搬运和存储,提高了药品的仓储效率。
scara机器人 技术参数
scara机器人技术参数
SCARA机器人是一种具有两个互相垂直的连杆的机器人,常用于装配、搬运、检测等工业自动化领域。
以下是SCARA机器人的技术参数:
1. 负载:SCARA机器人的负载通常在1-10千克之间,具体取决于机器人
的型号和设计。
2. 自由度:SCARA机器人具有两个自由度,分别是水平和垂直方向的旋转。
这两个自由度使得机器人可以在平面内精确地定位和定向。
3. 运动范围:SCARA机器人的运动范围取决于其连杆的长度和旋转角度。
一般来说,机器人的最大旋转角度为±180度。
4. 重复定位精度:SCARA机器人的重复定位精度通常在±±毫米之间,这使得机器人能够执行高精度的装配和检测任务。
5. 速度:SCARA机器人的速度取决于其驱动系统和负载。
一般来说,机器
人的最大速度为60个循环/分钟。
6. 控制方式:SCARA机器人可以通过各种方式进行控制,例如通过预编程
的程序、通过示教器或通过网络。
7. 电源:SCARA机器人的电源通常为直流电源,电压范围为24-48伏特。
8. 尺寸:SCARA机器人的尺寸取决于其设计和应用,一般来说,机器人的
长度和宽度分别为毫米和毫米。
以上是SCARA机器人的一些常见技术参数,具体参数可能会因制造商和应用而有所不同。
多关节SCARA四轴机器人底座设计
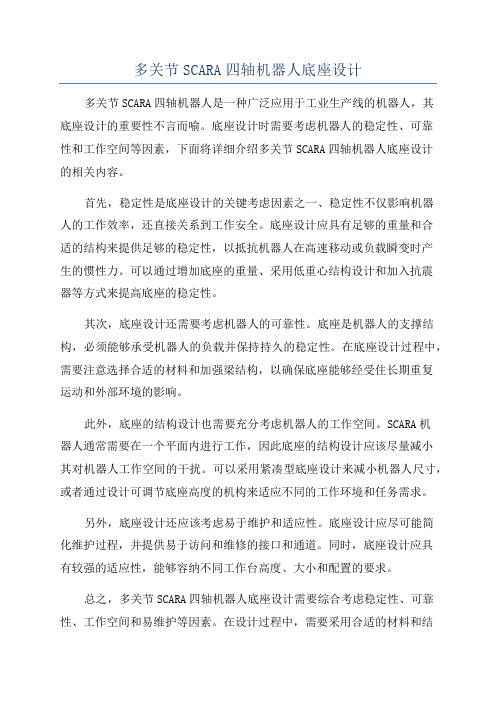
多关节SCARA四轴机器人底座设计多关节SCARA四轴机器人是一种广泛应用于工业生产线的机器人,其底座设计的重要性不言而喻。
底座设计时需要考虑机器人的稳定性、可靠性和工作空间等因素,下面将详细介绍多关节SCARA四轴机器人底座设计的相关内容。
首先,稳定性是底座设计的关键考虑因素之一、稳定性不仅影响机器人的工作效率,还直接关系到工作安全。
底座设计应具有足够的重量和合适的结构来提供足够的稳定性,以抵抗机器人在高速移动或负载瞬变时产生的惯性力。
可以通过增加底座的重量、采用低重心结构设计和加入抗震器等方式来提高底座的稳定性。
其次,底座设计还需要考虑机器人的可靠性。
底座是机器人的支撑结构,必须能够承受机器人的负载并保持持久的稳定性。
在底座设计过程中,需要注意选择合适的材料和加强梁结构,以确保底座能够经受住长期重复运动和外部环境的影响。
此外,底座的结构设计也需要充分考虑机器人的工作空间。
SCARA机器人通常需要在一个平面内进行工作,因此底座的结构设计应该尽量减小其对机器人工作空间的干扰。
可以采用紧凑型底座设计来减小机器人尺寸,或者通过设计可调节底座高度的机构来适应不同的工作环境和任务需求。
另外,底座设计还应该考虑易于维护和适应性。
底座设计应尽可能简化维护过程,并提供易于访问和维修的接口和通道。
同时,底座设计应具有较强的适应性,能够容纳不同工作台高度、大小和配置的要求。
总之,多关节SCARA四轴机器人底座设计需要综合考虑稳定性、可靠性、工作空间和易维护等因素。
在设计过程中,需要采用合适的材料和结构,以确保底座的稳定性和可靠性,并通过紧凑型设计和可调节的高度机构来适应机器人的工作空间需求。
这样设计出的底座能够有效地支撑机器人的工作,并提高整体工作效率和安全性。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
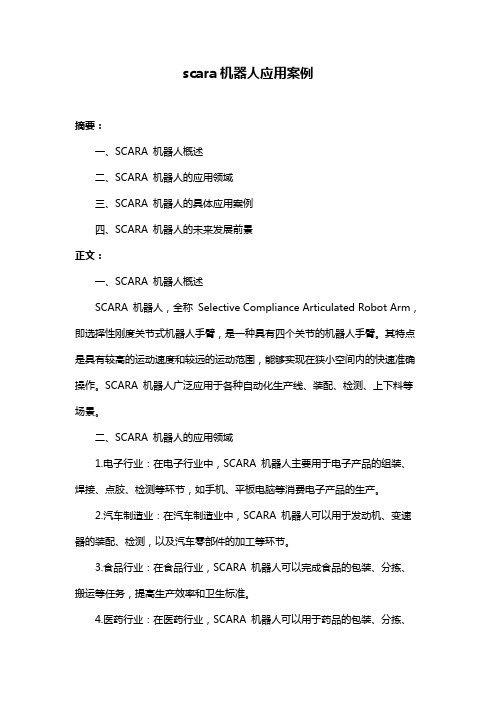
200W(带刹车) 100W +/- 0.08mm +/- 0.08mm +/- 0.02mm +/- 0.02° 5KG 26KG
节省成本。
系统特点:
采用众为兴高性能控制器,可控制机器人实现高速点位 运动,空间直线插补运动,空间圆弧插补等功能; 系统扩展性强,参数配置简单,易于维护; 基于高性能处理芯片的机器人功能部件保证了系统的实时控制与调度,实现多伺服功能部件的 联动与插补; 系统界面简洁大方,提供丰富的显示及监控信息; 机器人语言指令系统简单易学,能满足绝大部分工业需求。
多关节 SCARA 四轴机器人
ADT-600X4G300-5 众为兴多关节四轴机器人采用众 为兴高性能控制器,可控制机器人实现高速点位运动, 空间直线插补运动,空间圆弧插补等功能......
此机器人是众为兴公司在前期大量的工作基础上,倾力 打造的高端数控产品,它有以下特点: 。目前国内首台具有完全自主产权的多关节四轴机器人;. 。适应工业场合,能够稳定的长时间无故障运行; 。能够大批量生产; 。价格上适应我国国情,满足企业成本核算需求; 。适用于企业中简单、重复的小载荷搬运工位,效率高,
规格
参数
轴规格
X 轴 臂长/回转范围
350mm / ±115°
Y 轴 臂长/回转范围
250mm / ±145°
Z 轴 有效行程
300mm
R 轴 回转范围
±360°
X、Y 轴合成3.3m/s来自速度Z 速度 R 速度
1 m/s 360°/s
电机规格
X
400W
Y
200W
Z R 重复定位精度 X Y Z R 最大负载 本体重量