线性拓扑结构CAN总线布线规范
CAN总线结构与帧格式

状态值 ➢ 收发器 打开 ➢ 数据线路电压
0 V 至 5 V Komfort 舒适总线 约2,5 V Antrieb 驱动总线
CAN总线结构与帧格式
CAN总线系统数据的格式
0-优势
在CAN-数据总线系统中通常连接数个控制单 元。
只有当所有的控制单元发送“1”-Bit,在总 线上的信息逻辑上是“1”。
所不同的是,过载帧与错误帧之前没有帧间空间,多个过载 帧之间也不是由帧间空间隔离的。
CAN总线结构与帧格式
技术数据说明:
最大安全传输速率:1 Mbps = 1 Megabit per sec. = 1 000 000 bits per sec.
ISO标准:高速/低速分界点 125000bps
一个完整的信息传递平均周期:大约1ms(根据信息长度)
数据总线-线路
如果一个控制单元发送一个低位的字节并认出一 个高位的字节, 将停止发送并开始接收。
自动变速器控制 单元失败
CAN总线结构与帧格式
低位 高位
发动机控制单元 失败
CAN总线信号电压
CAN总线上是差分信号,一个差分信号是用一个数值 来表示两个物理量之间的差异。 0—显性—CANH对地3.5V,CANL 1.5V 1—隐性—CANH对地2.5V,CANL 2.5V
CAN总线结构与帧格式
CAN Bus 数据总线优点
与其他数据传输方式相比,CAN数据总线有如下优点:
➢ 数据传输时的高安全性及可靠性 ➢有利于降低成本 ➢ 数据传输速度较快( max. 1Mbps ),而且信息交换实时进行 ➢ 能以单线模式工作(出于安全因素,正常情况下双线同时工作) ➢ 国际标准化的数据传输协议利于实现在各车型上的统一ISO11898
can线束设计规则

can线束设计规则Can线束设计规则Can线束设计规则是指在Can总线系统中,对线束设计所需要遵循的一系列规范和要求。
Can总线作为一种广泛应用于汽车电子系统的通信协议,其线束设计的合理与否直接影响到系统的稳定性和可靠性。
因此,遵循Can线束设计规则是非常重要的。
一、线束布局规则1. 线束的布局应尽量保持整齐、规则。
线束之间的间距要足够,避免相互干扰或短路。
2. 线束应尽量避免与其他高电压或高频干扰源靠近,以减少干扰的可能性。
3. 不同信号的线束应尽量分开布置,避免相互干扰。
二、线束长度控制规则1. Can总线线束的长度应根据系统的具体要求进行控制。
通常情况下,线束长度不应超过40米。
2. Can总线线束的长度对于数据传输的速率也有一定的要求。
在高速传输时,线束长度应控制在30米以内,以保证数据传输的稳定性。
三、线束连接规则1. 线束的连接应采用可靠的连接器,确保连接的牢固性和稳定性。
2. 线束的连接器应具备防水、防尘等特性,以保护线束免受外界环境的影响。
3. 在连接线束时,应遵循正确的连接顺序和连接方式,确保连接的准确性和稳定性。
四、线束保护规则1. Can总线线束应采用专用的护套进行保护,以防止外界物体对线束的损坏或干扰。
2. Can总线线束应避免过度弯曲或过度拉伸,以避免线束内部导线的断裂或损坏。
3. Can总线线束应远离高温区域或高温源,以避免线束的老化或损坏。
五、线束标识规则1. Can总线线束应进行适当的标识,以便于识别和维护。
2. 线束标识应清晰可见,不易磨损或褪色。
3. 线束标识应包括线束的用途、接口类型、连接器型号等信息。
六、线束测试规则1. 在线束设计完成后,应进行必要的测试和验证,以确保线束的正确性和可靠性。
2. 线束测试应包括对连接性、绝缘性、干扰性等方面的测试。
3. 线束测试结果应记录并保留,以备日后维护或故障排查时使用。
Can线束设计规则是确保Can总线系统正常运行的关键因素之一。
CAN总线标准接口与布线规范

CAN 总线标准接口与布线规范
工业4.0 时代已经到来,基于自主优先级仲裁和错误重发机制的CAN 总线应用十分广泛,相同的各种总线故障和问题也十分困扰工程师,其实最
好的解决办法就是产品前期设计要相对的严谨,今天主要带大家熟悉CAN
总线的常用接口和布线规范。
随着CAN 总线技术的应用愈发广泛,不仅涉及汽车电子和轨道交
通,还包括医疗器械、工业控制、智能家居和机器人网络互联等,当然我们
的工程师也被各种奇葩的总线问题困扰,与其后期解决问题,不如前期有效
规避。
一、常见的CAN 总线标准接口
CAN 总线接口已经在CIA 出版的标准CIA 303_1 进行明确规定,熟知接口定义有助于提高自身产品和其它设备兼容性。
1.DB_9 端子
2.M12 端子
图3 M12 接口定义
图3 是M12 形式的接口定义,在这里可能没有什幺特别需要注意的点,还有就是除了5pin 的接口还有8pin、9pin、10pin 和12pin 的接口,具体的定义不在赘述,可参考标准CIA 303_1。
二、CAN 总线布线规范
如果你是一个CAN 总线的入门小白,下面的总线布线规范,你可能
得收藏起来,在你组网布线的时候时不时拿出来看看,相信对你会非常有帮。
CAN总线工程布线安装规范

CAN总线工程布线规范
1.CAN总线简介
CAN总线采用一对差分电缆作为传输介质,所有节点均直接连接到这一对公共传输介质上并行排列,接收或发送数据信息。
在总线两端,分别加入终端电阻予以终结,以防止节点在网络上发送的信号在到达电缆末端时反射,常见的CAN总线网络拓扑结构如图1所示。
图1 CAN总线网络拓扑结构
2. 理论安装布线
理论安装布线示意图如图2所示。
监控器和监控主机上均有对应的通讯端口CANH和CANL,工程布线安装时,从监控主机引出通讯线,所有监控器挂接到这两根通讯线缆上,通讯线最远端连接120Ω终端电阻。
CANH和CANL有极性之分,不可接反。
图2 理论安装布线示意图
注意,监控主机内部包含120Ω终端电阻,所以正常连接后,两根总线间阻值为60Ω左右,从主机端断开信号线,线间电阻为120Ω,通过测量阻值即可判别布线安装是否正确。
3.特殊分支布线
工程布线时,推荐按照理论安装方式布线,可保证通讯稳定性最佳,但实际应用时可能布线比较繁琐,增加成本。
如CAD图3所示,工程包含三栋建筑,每栋建筑六层,每层三个节点。
右下角为监控主机,通讯线首先分支进入最近的A栋建筑,而后分支进入B栋建筑,最后主干线进入最远的C栋建筑,每层亦可分支连接各个监控器,主干线在C栋建筑顶层最远的监控器处终结,连接120欧电阻盒。
工程若只有一栋建筑,可参照C栋连接方式布线。
注意,特殊分支布线方式通讯易不稳定,所以应尽量少用,且分支线越短越好,连接的节点越少越好。
如果某栋建筑的某一层有很多节点,最好采用理论安装方式布线,其他层节点较少,则可使用特殊分支方式布线。
图3 特殊分支布线。
CAN总线布线规范

CAN总线布线规范[导读]今天的CAN总线已从汽车电子慢慢渗透入工业自动化,医疗,铁路等众多领域。
据我们的数据统计,客户在使用CAN总线时约80%的问题均是由总线布局布线不合理导致,今天我们就来扒一扒CAN总线的布局布线规范。
摘要:今天的CAN总线已从汽车电子慢慢渗透入工业自动化,医疗,铁路等众多领域。
据我们的数据统计,客户在使用CAN总线时约80%的问题均是由总线布局布线不合理导致,今天我们就来扒一扒CAN总线的布局布线规范。
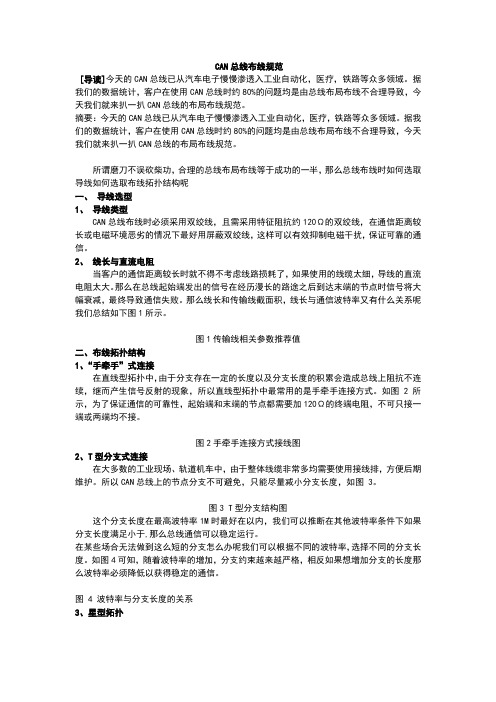
所谓磨刀不误砍柴功,合理的总线布局布线等于成功的一半,那么总线布线时如何选取导线?如何选取布线拓扑结构呢?一、导线选型1、导线类型CAN总线布线时必须采用双绞线,且需采用特征阻抗约120Ω的双绞线,在通信距离较长或电磁环境恶劣的情况下最好用屏蔽双绞线,这样可以有效抑制电磁干扰,保证可靠的通信。
2、线长与直流电阻当客户的通信距离较长时就不得不考虑线路损耗了,如果使用的线缆太细,导线的直流电阻太大。
那么在总线起始端发出的信号在经历漫长的路途之后到达末端的节点时信号将大幅衰减,最终导致通信失败。
那么线长和传输线截面积,线长与通信波特率又有什么关系呢?我们总结如下图1所示。
图1传输线相关参数推荐值二、布线拓扑结构1、“手牵手”式连接在直线型拓扑中,由于分支存在一定的长度以及分支长度的积累会造成总线上阻抗不连续,继而产生信号反射的现象,所以直线型拓扑中最常用的是手牵手连接方式。
如图2所示,为了保证通信的可靠性,起始端和末端的节点都需要加120Ω的终端电阻,不可只接一端或两端均不接。
图2手牵手连接方式接线图2、T型分支式连接在大多数的工业现场、轨道机车中,由于整体线缆非常多均需要使用接线排,方便后期维护。
所以CAN总线上的节点分支不可避免,只能尽量减小分支长度,如图3。
图3 T型分支结构图这个分支长度在最高波特率1M时最好在0.3m以内,我们可以推断在其他波特率条件下如果分支长度满足小于0.3m,那么总线通信可以稳定运行。
CAN-bus电缆、CAN-bus插座、CAN-bus布线规范

Signal assi gnment of wire and conn ection of earthing and terminator
CAN wire with connectors
DSUB9 connector (female or male) pin designation
Shield
(at outer wire shield) n.c.
工程应用笔记
目录
1.适用范围................................................................................................................ 1 2.电缆选择................................................................................................................ 2
2.1 2.2 2.3 最低要求 ...................................................................................................................2 电缆选择的要素 .......................................................................................................2 电缆选择的极限值 ...................................................................................................2 2.3.1 电缆结构 ...........................................................................................................2 2.3.2 电缆有效电阻 ...................................................................................................3 2.3.3 DB9 连接器的有效电阻 ..................................................................................3 2.3.4 电缆适用类型示例 ...........................................................................................3 2.4 取决于电缆长度的波特率 .......................................................................................5 2.4.1 CiA推荐的位定时 ............................................................................................5 2.4.2 采用本文 CAN接口时最大的导线长度.........................................................6 2.5 布线长度、节点数量、线缆线径之间的关系 .......................................................7 配线和连接 ...............................................................................................................9 DB9 连接方式的插座与插头 ................................................................................10 OPEN5 连接器 .......................................................................................................13
CAN-bus拓扑结构详解

Node 2
Node n
R
R
致远电子
传递价值 成就你我
http://www.embedcontrol. com
网络长度参数
CAN-bus 位速率:1Mbps
总线长度:最大40m 支线长度:最大0.3m 节点距离:最大40m
CAN-bus 位速率:5Kbps
总线长度:最大10Km 支线长度:最大6m 节点距离:最大10Km
CAN-bus国际标准 ISO 11898
ISO 11898-1/2/3 ISO 11898-4
注意:
CAN-bus 底层协议只定义物理层、数据链路层。 CAN 2.0规范、国际标准ISO 11898是设计CAN应用系统的基本依据。
致远电子
传递价值 成就你我
http://www.embedcontrol. com
NODE
NODE
NODE
NODE
NODE
NODE
NODE
NODE
NODE
NODE
NODE
致远电子
传递价值 成就你我
http://www.embedcontrol. com
线性拓扑的扩展(二)
多条分支网络通过集线器(HUB)连接到干线 每个分支网络符合ISO 11898标准
CAN-bus CANhub 集线器
- Acceptance Filtering - Overload Notification - Recover Management
http://www.embedcontrol. com
CAN节点与总线连接
CAN节点通过支线连接到总线
CAN-bus总线现场布线和接口设计及电缆和连接器选择
等长 星型连接 2.2.1 “ ”
............................................................................................. 8
使用 总线插入式光电适配器的连接 2.2.2
CAN
..................................................... 9
引言 7.1
...................................................................................................................... 23
产品简介 7.2
............................................................................................................... 23
连接器 6.3 OPEN5
...................................................................................................... 21
附录 总线物理 逻辑分析和测量的新标准 7.
A CAN
&
....................................................... 23
三通布线 3.2
............................................................................................................... 10
CAN-bus电缆、插座、布线规范

DSUB9 connector (female or male) pin designation n.c.
1 2 3 4 5 6 7 8 9 connector case
CAN_L
n.c. n.c. n.c. n.c. n.c. n.c. n.c. = not connected
Sign al assig nment of wir e and conn ection of earthing and terminator
CAN wire with connectors
DSUB9 connector (female or male) pin designation
CAN_GND
3. 插座的选择............................................................................................................... 8
3.1 3.2 3.3 4.1
4. 布线规范与终端电阻选择..................................................................................... 14
直线型拓扑结构 ..................................................................................................... 14 4.1.1 “手牵手”式连接 ......................................................................................... 14 4.1.2 “T”型分支式连接......................................................................................... 14 4.1.3 使用 CAN 网桥中继器的连接....................................................................... 15 4.1.4 使用 CAN 光纤转换器的连接....................................................................... 16 4.2 星型拓扑结构 ......................................................................................................... 16 4.2.1 “等长”星型连接 ......................................................................................... 16 4.2.2 使用 CAN 集线器的连接 .............................................................................. 17
can总线拓扑结构方案

CAN总线拓扑结构方案简介CAN(Controller Area Network)总线是一种常用于现代汽车、工业控制和其它应用的串行通信协议。
它的主要特点是高可靠性、实时性和高带宽,被广泛应用于车载电子系统和工业领域。
在CAN总线系统中,拓扑结构方案的设计起着至关重要的作用。
本文将介绍几种常见的CAN总线拓扑结构方案,并对各种方案的特点、优缺点进行比较和分析。
单总线拓扑结构单总线拓扑结构是最简单的拓扑结构方案,也是最常用的方案之一。
在单总线拓扑结构中,所有节点都直接连接到同一根总线上。
节点之间通过总线共享数据和通信。
特点•简单、容易实现和维护。
•总线长度可以较长,适合中大型系统的应用。
•总线上只有一个主节点,其他节点均为从节点。
优点•简化硬件设计,减少成本。
•节省总线线缆和器件的使用。
缺点•对于大型系统,总线长度过长会导致信号衰减和反射现象。
•节点数过多时,总线的负载会过重,影响总线性能。
星型拓扑结构星型拓扑结构是另一种常见的拓扑结构方案。
在星型拓扑结构中,所有节点都通过独立的连线连接到主节点(集线器或交换机)。
特点•易于添加或移除节点,不影响其他节点的通信。
•可以通过改变主节点的位置来改变系统的结构。
优点•总线长度可以更长,较少信号衰减和反射问题。
•每个节点之间的通信不会影响其他节点的通信。
缺点•需要更多的线缆。
•需要额外的集线器或交换机等设备。
环型拓扑结构环型拓扑结构是一种将所有节点构成环形的拓扑结构方案。
在环型拓扑结构中,每个节点都与相邻的节点连接,形成一个闭环。
特点•每个节点之间可以直接通信,无需通过中间节点。
•所有节点都能接收到通过总线传输的数据。
优点•可以实现较高的传输速率。
•可以实现实时性较高的通信。
缺点•每个节点都需要两个接口,增加成本。
•添加或移除节点需要重新布线。
混合拓扑结构混合拓扑结构是将多种拓扑结构方案结合在一起的方案。
在混合拓扑结构中,可以同时使用单总线、星型、环型等多种拓扑结构。
CAN总线布线规范
CAN总线布线规范[导读]今天的CAN总线已从汽车电子慢慢渗透入工业自动化,医疗,铁路等众多领域。
据我们的数据统计,客户在使用CAN总线时约80%的问题均是由总线布局布线不合理导致,今天我们就来扒一扒CAN总线的布局布线规范。
摘要:今天的CAN总线已从汽车电子慢慢渗透入工业自动化,医疗,铁路等众多领域。
据我们的数据统计,客户在使用CAN总线时约80%的问题均是由总线布局布线不合理导致,今天我们就来扒一扒CAN总线的布局布线规范。
所谓磨刀不误砍柴功,合理的总线布局布线等于成功的一半,那么总线布线时如何选取导线如何选取布线拓扑结构呢一、导线选型1、导线类型CAN总线布线时必须采用双绞线,且需采用特征阻抗约120Ω的双绞线,在通信距离较长或电磁环境恶劣的情况下最好用屏蔽双绞线,这样可以有效抑制电磁干扰,保证可靠的通信。
2、线长与直流电阻当客户的通信距离较长时就不得不考虑线路损耗了,如果使用的线缆太细,导线的直流电阻太大。
那么在总线起始端发出的信号在经历漫长的路途之后到达末端的节点时信号将大幅衰减,最终导致通信失败。
那么线长和传输线截面积,线长与通信波特率又有什么关系呢我们总结如下图1所示。
图1传输线相关参数推荐值二、布线拓扑结构1、“手牵手”式连接在直线型拓扑中,由于分支存在一定的长度以及分支长度的积累会造成总线上阻抗不连续,继而产生信号反射的现象,所以直线型拓扑中最常用的是手牵手连接方式。
如图 2所示,为了保证通信的可靠性,起始端和末端的节点都需要加120Ω的终端电阻,不可只接一端或两端均不接。
图2手牵手连接方式接线图2、T型分支式连接在大多数的工业现场、轨道机车中,由于整体线缆非常多均需要使用接线排,方便后期维护。
所以CAN总线上的节点分支不可避免,只能尽量减小分支长度,如图 3。
图3 T型分支结构图这个分支长度在最高波特率1M时最好在以内,我们可以推断在其他波特率条件下如果分支长度满足小于,那么总线通信可以稳定运行。
CAN-bus拓扑结构

目前,采用双绞线的CAN总线分布式系统已得到 广泛应用,如汽车电子、电梯控制、电力系统、远 程传输等。
致远电子
传递价值 成就你我
双绞线的使用
双绞线采用抗干扰的差分信号传输方式;
使用非屏蔽双绞线作为物理层,只需要有2根线缆 作为差分信号线(CANH、CANL)传输; 使用屏蔽双绞线作为物理层,除需要2根差分信号 线(CANH、CANL)的连接以外,还要注意在同 一网段中的屏蔽层(SHIELD)单点接地问题。
传输介质(Bus Medium)
物理介质必须支持“显性(0)”和“隐性(1)”状 态。 双线结构总线必须使用终端电阻抑制信号反射,并且 采用差分信号传输减弱电磁干扰(EMI)的影响。
使用光学介质时,隐性电平通过状态“暗”表示,显 性电平通过状态“亮”表示;
Version 1.20版
2006年5月
致远电子传ຫໍສະໝຸດ 价值 成就你我控制网络设计原则
控制网络有二个基本设计原则
集中式 分布式
大部分网络协议,如CAN-bus、ProfiBus、 EtherNet、Lonworks等都采用了把智能单元 分布在整个网络中的分布式设计原则。
致远电子
传递价值 成就你我
线性拓扑的扩展(二)
多条分支网络通过集线器(HUB)连接到干线
CAN-bus CANhub 集线器
其他CAN-bus网络
CAN-bus CAN-bus CAN节点 CAN节点 CAN节点
其他CAN-bus网络
CAN-bus
Medium Access Control (MAC)
- Data Encapsulation/Decapsulation - Frame Coding (stuffing/destuffing) - Error Detection/Signaling - Serialization/Deserialization
CAN线实际制作规范
目前公司系统中的通讯方式均采用CAN通讯而且传统车也越来越多的采用CAN,CAN是一种分布式的控制总线,简化了布线的难度,以前十几根甚至几十根的信号传输线被一根双芯屏蔽线取代,这就是CAN:
1.很多控制器协同完成特定功能的任务;
2.每个节点一般来说比较简单,使用微型单片机;
3.更高的可靠性;
4.较少的线缆
在实际有关CAN线时需要注意一下几点
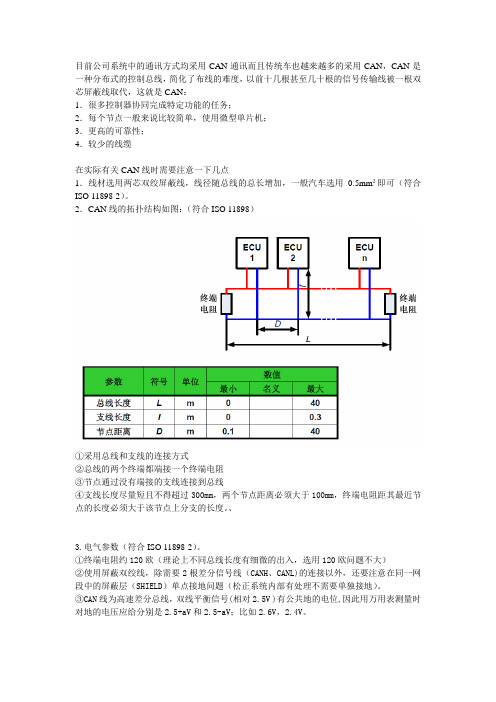
1.线材选用两芯双绞屏蔽线,线径随总线的总长增加,一般汽车选用0.5mm²即可(符合ISO 11898-2)。
2.CAN线的拓扑结构如图:(符合ISO 11898)
①采用总线和支线的连接方式
②总线的两个终端都端接一个终端电阻
③节点通过没有端接的支线连接到总线
④支线长度尽量短且不得超过300mm,两个节点距离必须大于100mm,终端电阻距其最近节点的长度必须大于该节点上分支的长度。
、
3.电气参数(符合ISO 11898-2)。
①终端电阻约120欧(理论上不同总线长度有细微的出入,选用120欧问题不大)
②使用屏蔽双绞线,除需要2根差分信号线(CANH、CANL)的连接以外,还要注意在同一网段中的屏蔽层(SHIELD)单点接地问题(松正系统内部有处理不需要单独接地)。
③CAN线为高速差分总线,双线平衡信号(相对2.5V )有公共地的电位,因此用万用表测量时对地的电压应给分别是2.5+aV和2.5-aV;比如2.6V,2.4V。
CAN总线标准接口与布线规范

CAN总线标准接口与布线规范 工业4.0时代已经到来,基于自主优先级仲裁和错误重发机制的CAN总线应用十分广泛,相同的各种总线故障和问题也十分困扰工程师,其实最好的解决办法就是产品前期设计要相对的严谨,今天主要带大家熟悉CAN总线的常用接口和布线规范。
随着CAN总线技术的应用愈发广泛,不仅涉及汽车电子和轨道交通,还包括医疗器械、工业控制、智能家居和机器人网络互联等,当然我们的工程师也被各种奇葩的总线问题困扰,与其后期解决问题,不如前期有效规避。
一、常见的CAN总线标准接口 CAN总线接口已经在CIA出版的标准CIA 303_1进行明确规定,熟知接口定义有助于提高自身产品和其它设备兼容性。
1.DB_9端子 图 1 DB_9接口定义 图1一般工业中最常用的9针D-Sub连接器,分公头和母头,这里值得一提的是引脚6和9在标准中也是定义了功能的,9定义为收发器/光耦合器的正极电源,但在工业领域常常会有所变化,6和9也常用做CAN设备电源电压的输入引脚,但这种技术局限性较大,因为通过引脚运输到的电流非常有限,参考标准CIA 303_1。
2.OPEN_5端子 图 2 Open_5接口定义 图2是Open_5形式的接口定义,如果OPEN_4端子的一般使用1-4pin或2-5pin,如果Open_3端子的一般使用的2-4pin,需根据实际情况选择。
3.M12端子 图 3 M12接口定义 图3是M12形式的接口定义,在这里可能没有什么特别需要注意的点,还有就是除了5pin的接口还有8pin、9pin、10pin和12pin的接口,具体的定义不在赘述,可参考标准CIA 303_1。
二、CAN总线布线规范 如果你是一个CAN总线的入门小白,下面的总线布线规范,你可能得收藏起来,在你组网布线的时候时不时拿出来看看,相信对你会非常有帮助。
1.CAN总线布线形式 1)“手牵手”式连接 图 4 “手牵手”式连接 手牵手布线是最基本的一种方式,需要注意的是在布线的时候电阻和电抗分配必须合理,一般要求在首尾两端各配一个120欧的终端电阻,不可只接单端或不接。
CAN总线布线要求指导
CAN总线布线要求指导
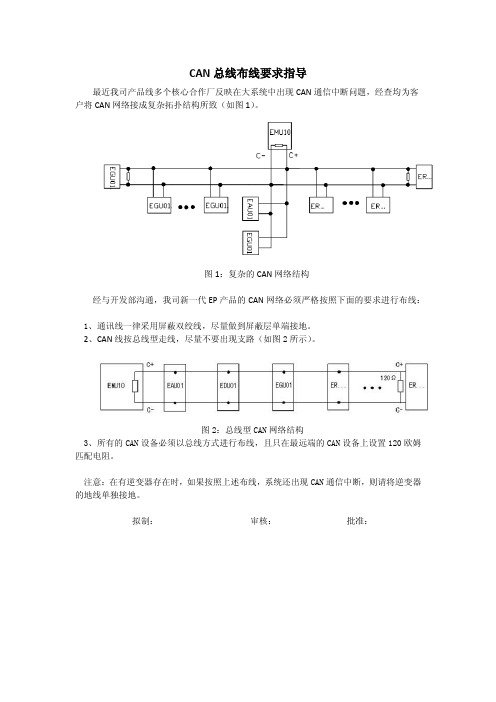
最近我司产品线多个核心合作厂反映在大系统中出现CAN通信中断问题,经查均为客户将CAN网络接成复杂拓扑结构所致(如图1)。
图1:复杂的CAN网络结构
经与开发部沟通,我司新一代EP产品的CAN网络必须严格按照下面的要求进行布线:
1、通讯线一律采用屏蔽双绞线,尽量做到屏蔽层单端接地。
2、CAN线按总线型走线,尽量不要出现支路(如图2所示)。
图2:总线型CAN网络结构
3、所有的CAN设备必须以总线方式进行布线,且只在最远端的CAN设备上设置120欧姆匹配电阻。
注意:在有逆变器存在时,如果按照上述布线,系统还出现CAN通信中断,则请将逆变器的地线单独接地。
拟制:审核:批准:。
CAN总线标准接口与布线规范

CAN总线标准接口与布线规范工业4.0时代已经到来,基于自主优先级仲裁和错误重发机制的CAN总线应用十分广泛,相同的各种总线故障和问题也十分困扰工程师,其实最好的解决办法就是产品前期设计要相对的严谨,今天主要带大家熟悉CAN总线的常用接口和布线规范。
随着CAN总线技术的应用愈发广泛,不仅涉及汽车电子和轨道交通,还包括医疗器械、工业控制、智能家居和机器人网络互联等,当然我们的工程师也被各种奇葩的总线问题困扰,与其后期解决问题,不如前期有效规避。
一、常见的CAN总线标准接口CAN总线接口已经在CIA出版的标准CIA 303_1进行明确规定,熟知接口定义有助于提高自身产品和其它设备兼容性。
1.DB_9端子图 1 DB_9接口定义图 1一般工业中最常用的9针D-Sub连接器,分公头和母头,这里值得一提的是引脚6和9在标准中也是定义了功能的,9定义为收发器/光耦合器的正极电源,但在工业领域常常会有所变化,6和9也常用做CAN设备电源电压的输入引脚,但这种技术局限性较大,因为通过引脚运输到的电流非常有限,参考标准CIA 303_1。
2.OPEN_5端子图 2 Open_5接口定义错误!未找到引用源。
是Open_5形式的接口定义,如果OPEN_4端子的一般使用1-4pin 或2-5pin,如果Open_3端子的一般使用的2-4pin,需根据实际情况选择。
3.M12端子图 3 M12接口定义图 3是M12形式的接口定义,在这里可能没有什么特别需要注意的点,还有就是除了5pin的接口还有8pin、9pin、10pin和12pin的接口,具体的定义不在赘述,可参考标准CIA 303_1。
二、CAN总线布线规范如果你是一个CAN总线的入门小白,下面的总线布线规范,你可能得收藏起来,在你组网布线的时候时不时拿出来看看,相信对你会非常有帮助。
1.CAN总线布线形式1)“手牵手”式连接图 4 “手牵手”式连接手牵手布线是最基本的一种方式,需要注意的是在布线的时候电阻和电抗分配必须合理,一般要求在首尾两端各配一个120欧的终端电阻,不可只接单端或不接。
浅淡CAN总线,CAN总线网络拓扑结构

浅淡CAN总线,CAN总线网络拓扑结构
在前2天的推送中我们介绍了I2C、SPI 总线,但它们多用于传输距离短、协议简单、数据量小、主要面向IC(集成电路)间通信的“轻量级”场合。
而CAN 总线则不同,CAN 总线定义了更为优秀的物理层、数据链路层,并且拥有种类丰富、简繁不一的上层协议。
什幺是CAN 总线
CAN 是“Controller Area Network”的缩写,即“控制器局域网”,是一个ISO 标准的串行通信协议。
CAN 总线由德国BOSCH 公司研发设计,用于应对汽车上日益庞大的电子控制系统的需求,其最大的特点是可拓展性好,可承受大量数据的高速通信,并且高度稳定可到。
ISO 组织通过ISO11898 和ISO11519 对CAN 总线进行了标准化,使其早早确立了欧洲汽车总线标准的地位。
时至今日,CAN 总线已经获得业界的高度认可,其应用也从汽车电子领域延伸至工业自动化、船舶、医疗设备、工业设备等领域。
CAN 总线网络拓扑结构。
CAN总线标准接口与布线规范

CAN总线标准接口与布线规范工业4.0时代已经到来,基于自主优先级仲裁和错误重发机制的CAN总线应用十分广泛,相同的各种总线故障和问题也十分困扰工程师,其实最好的解决办法就是产品前期设计要相对的严谨,今天主要带大家熟悉CAN总线的常用接口和布线规范。
随着CAN总线技术的应用愈发广泛,不仅涉及汽车电子和轨道交通,还包括医疗器械、工业控制、智能家居和机器人网络互联等,当然我们的工程师也被各种奇葩的总线问题困扰,与其后期解决问题,不如前期有效规避。
一、常见的CAN总线标准接口CAN总线接口已经在CIA出版的标准CIA 303_1进行明确规定,熟知接口定义有助于提高自身产品和其它设备兼容性。
1. DB_9端子图1 DB_9接口定义图1一般工业中最常用的9针D-Sub连接器,分公头和母头,这里值得一提的是引脚6和9在标准中也是定义了功能的,9定义为收发器/光耦合器的正极电源,但在工业领域常常会有所变化,6和9也常用做CAN设备电源电压的输入引脚,但这种技术局限性较大,因为通过引脚运输到的电流非常有限,参考标准CIA 303_1。
2. OPEN_5端子图2 Open_5接口定义图2是Open_5形式的接口定义,如果OPEN_4端子的一般使用1-4pin或2-5pin,如果Open_3端子的一般使用的2-4pin,需根据实际情况选择。
3. M12端子图3 M12接口定义图3是M12形式的接口定义,在这里可能没有什么特别需要注意的点,还有就是除了5pin 的接口还有8pin、9pin、10pin和12pin的接口,具体的定义不在赘述,可参考标准CIA 303_1。
二、CAN总线布线规范如果你是一个CAN总线的入门小白,下面的总线布线规范,你可能得收藏起来,在你组网布线的时候时不时拿出来看看,相信对你会非常有帮助。
can总线拓扑结构类型
can总线拓扑结构类型Can总线拓扑结构类型Can总线是一种广泛应用于工业控制领域的通信总线,它可以实现多个设备之间的数据传输和通信。
Can总线的拓扑结构类型有多种,包括线性拓扑、星型拓扑、总线拓扑和混合拓扑。
本文将对这四种拓扑结构类型进行详细介绍。
一、线性拓扑线性拓扑是Can总线最基本的拓扑结构类型,也是最简单的一种结构。
在线性拓扑中,所有设备按照一定的顺序连接在一条主线上,数据通过主线依次传输到各个设备。
线性拓扑结构简单清晰,易于实现和维护,但是在大规模系统中存在传输延迟和信号衰减的问题。
二、星型拓扑星型拓扑是Can总线中常见的拓扑结构类型,它将所有设备连接到一个中央节点上。
中央节点负责转发数据,实现设备之间的通信。
星型拓扑结构具有良好的灵活性和可扩展性,可以方便地增加或删除设备,但是中央节点的故障会导致整个系统瘫痪。
三、总线拓扑总线拓扑是Can总线中最常用的拓扑结构类型,也是Can总线的特点之一。
在总线拓扑中,所有设备都连接在同一条总线上,通过总线实现数据的传输和通信。
总线拓扑结构简单直观,能够实现高效的数据传输,但是当设备数量增多时,总线可能会出现带宽瓶颈和信号干扰的问题。
四、混合拓扑混合拓扑是Can总线中复杂的一种拓扑结构类型,它将多种拓扑结构进行组合,形成一个复杂的网络结构。
混合拓扑结构可以根据实际需求灵活设计,既能满足不同设备之间的通信需求,又能保证系统的可靠性和稳定性。
混合拓扑结构的设计和维护较为复杂,需要合理规划和管理。
总结起来,Can总线的拓扑结构类型包括线性拓扑、星型拓扑、总线拓扑和混合拓扑。
不同的拓扑结构类型适用于不同的应用场景,可以根据实际需求进行选择和设计。
在实际应用中,需要综合考虑系统的可靠性、性能、成本等因素,选择最适合的拓扑结构类型。
同时,对于大规模系统,还需要合理规划和管理拓扑结构,以确保系统的稳定运行和高效通信。
Can总线的拓扑结构类型是Can总线应用中的重要内容,对于工程师和技术人员来说,了解和掌握这些拓扑结构类型对于设计和实施Can总线系统具有重要意义。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
如图 5 所示,在 IOS-11898-2 中规定分支长度在 1M 波特率下不得大 于 0.3m,1M 波特率是 CAN 的最高波特率,所以其他波特率时,分支长度如 果也遵循 0.3m 规范,则可以稳定运行。 图 5 “T”型网络拓扑参数 四、如何确定分支长度 IOS 11898-2 中分支长度的规定是在 1M 波特率的条件下,有些场合或 许无法做到很短的分支,根据不同波特率,分支长度规范可以有适当的调整。 不同波特率下分支长度可以达到多少?需要分析节点的信号质量进行评判, 测量节点在不同分支长度下的信号质量,即可找到合适的分支长度范围。 如图 6 所示,评估节点信号质量需要测量节点 CAN 差分信号的最小 电压幅值、最大电压幅值、信号幅值、波形上升沿时间、波形下降沿时间、 信号时间等进行综合评分,具体参数指标在 ISO 11898-2 中有详细规定。
图 3 “手拉手”式连接 但是在绝大多数的工业现场、轨道机车中,由于整体线缆非常多,均 需要使用接线排,以方便维护。所以会采用“T”型分支式连接,如图 4 所示。 图 4 “T”型连接 三、“T”型连接分支约束 T 型接线方式会存在由于分支长度以及分支长度的积累造成阻抗的不 连续,因而接头处产生信号“反射”的现象。反射的信号量由瞬态阻抗的变化 量决定,变化量越大,反射就越严重。分支处产生的是负相反射,引起信号 电平下冲,这种下冲可能会超过噪声容限,造成误触发。为了避免这种情况 发生,希望反射波尽快回到源端,也就是支线要尽可能短。
图 1 CAN 拓扑结构特点 二、线性拓扑接线方式 在 IOS-11898-2 中有高速 CAN 物理层规范,其中推荐 CAN 网络采用 总线形式的线性拓扑结构,如图 2 所示,线性拓扑 CAN 网络采用单一信道 (总线)作为传输介质,所有的站点通过相应的硬件接口接到一条公共的总 线上。线性拓扑阻抗匹配比较简单,只需要在主干的两端并上合适的终端电 阻即可(2km 内通常为 120Ω)。 图 2 线性拓扑 线性拓扑结构是 CAN 总线布线规范中最为常见的,线性拓扑结构中, 最常用的就是“手拉手”式的连接,如图 3 所示。
图 6 信号质量参数
信号质量评估没有专业的工具显然是件麻烦的事情,想要快速评判节
点的信号质量,可以使用 CANScope 的信号质量分析插件一键分析。分析插
件通过分析每个 CAN 节点发出的波形,自动对其进行综合评分,然后通过
柱状图来直观显示出每个 CAN 帧 ID 的信号质量(如图 7 所示),从而获得
线性拓扑结构 CAN 总线布线规范
线性拓扑是 CAN 总线布线规范中最为常见的,如果采用了线性拓扑 中的“T”型分支连接,按规定分支长度是不能大于 0.3m 的,需要更长的分支 应该怎幺办呢? 一、CAN 拓扑分类 CAN (控制器局域网, controller area network)属于工业现场总线的范畴, 是一种有效支持分布式控制和实时控制的多主异步串行通信网络。CAN 网络 的拓扑结构主要有线性拓扑、星形拓扑、树状拓扑和环形拓扑,这几种拓扑 的结构的特点如图 1 所示。
每一个节点的信号质量,定量评价节点的物理层质量。
ห้องสมุดไป่ตู้
图 7 信号质量柱状图
<!--