综合船桥系统
综合船桥系统分析研究

2综合船 桥 系统的发 展 21 B . JS的发展大 体上经 历 7三 个阶段 [: 4
2 1 16 年代 末期 ~7 年 代初期 . . 0 O 挪 威 Nr o to 公司在 16 年 开发 了世界 上第一套 IS命 名 为数据桥 oc nr l 99 B, (aa B ig ) D t r e 。这 种 初期 的 I s主要 由 “ 据雷 达 ” 数 据 航行 ” d B 数 、“ 、 “ 据 定 位 ”和 “ 据 操 舵 ”等 四个 子 系 统 构 成 。 这种 系统 实际 上 是 一 数 数 种计算 机化 的避碰和 综合 导航系统 , 合程度 较低 , 能主要 限于 导航 。17 综 功 90 年 日本也 在 “ 光 丸 ”油轮 安装 了数 据 桥 系 统 。 星
该 监控 中心也可 看成 是一个 航行 管理系 统 。增 加 了通 信功 能是这 一阶段 I SБайду номын сангаасB 的另一突 出特 点。实现 通信功 能的典 型系统 是美 国斯伯利 的计算 机数据 传输 通 信网络 。通 信网络 是充 分发 挥 I s 率的关 键技 术, I S实现船 舶航 行 B 效 使 B
[ ]。 3
国际上 ,B 是从 6 年代 末期发 展起 来的, IS O 经过近 4 年 的发 展, 0 目前世 界 上先 进 国家 己研 制推 出 了第三 代 、第 四代新 的 I S。它 作 为全船 自动化 的 B 个 重要组 成 部分, 开始 广泛 装备 于各种 舰船 。I S的研究 具有 重要 的现实 B 意 义 和 军 事价 值 。
行 管理 控制 自动 化等 多种 功 能 。系统 的主 要使 命 是实现 船 舶航 行 高度 自动 化 , 高 航行 的安全 性 、经 济性 和有 效性 [ ] 已成 为从 8 提 1。 O年 代末 到 9 O年 代最 富活 力的船 舶 自动 化发 展技 术, 进人 2 是 1世纪船舶 的目标发 展技术 [] 2
综合船桥系统对船舶航行安全的影响

综 合 船 桥 系统 是 将 船 上 的各 种 导 航 设 备 、船 舶 操 作 控制 设 备和 雷达 避碰 设 备通 过 网络有 机结 合 起来 ,利 用 计 算 机 、 现代 控 制 、信 息 融合 等 技 术 实 现 其 功 能(如 图 1),独立 设 备 的损坏 ,应不 影 响其 他子 系统 的工作 , 并 在 雷达 、ECDIS及 Conning上 采 用 多功 能显 示 系统 , 在 每 一 个工 作 站上 随 时 可 以进 行 功 能切 换 。 由于 对 IBS 的设 计 要 求没 有 形 成 统 一 的标 准 ,但 符 合 国 际海 上 人 命 安全 公 约 的综合 船桥 系统 组成 需包 括 :ECDIS、中 央 驾 控 、 雷达 、 监控 报 警 系统 。 lBS另外 配 有辅 助 导航 定 位 的设 备 如 全球 定 位 系统 GPS/DGPS、 磁 罗 经 和 电罗
口
∞
蚴
冀 徐东星 ,范 少勇
船 舶 的 航 行 安 全 一 向是 海 上 运 输 的 热 点 问 题 。 近 年 来 , 随 着 航 海 科 学 技 术 的 发 展 , 综 合 船 桥 系 统 (Integrated Bridge System ,IBS)以一 种新 型 的导航 设 备在船 舶 安全 航行 方 面起 到 了重 要 的作 用 ,是 一种 利 用现 代 电子 信 息技 术将 各种 定位 仪 、雷达 、 自动 识 别 系 统 (Automatic Identification System,AIS)、 自动 雷 达标 绘 仪 (Automatic Rada r Plotting Aid,ARPA)、 全 球定 位 系统 /差 分全 球定 位 系 统 (Global Positioning System/Differential Global Positioning System , GPS/ DGPS )、 电子 海 图显 示 与 信 息 系统 (Elect ronic Cha rt Display and Jnformation System ,ECDIS)及 数 字 自动 舵连 接 起来 ,组 成船 舶 自动 航 行系 统 ,在 保 障航 行 安全 问题 上 要优 于 各个 单独 使用 的 设备 。 它作 为船 舶 自动 化 的 一个 重要 组成 部 分 , 已经 普遍 安 装于 商船 、 渔船及 军 舰 等各 类船 舶上 ,实现 了船 舶 的导 航 、航 行 管理 、 自动 识 别等 功 能 ,可 以 自动 获取 船舶 周 围 的航 行 环境 信 息 , 减 少 了驾驶 员频 繁 的操 船和 工 作 负担 ,给驾 驶 员做 出正 确 的操 船决 策 留有 了充 足 的时 间 ,船 舶航 行 的 安全 性 、 经 济性 和 有效 性得 到 了提高 。 但是 盲 目信 赖 综 合船桥 系 统 ,也 会给船 舶航 行 带来 安全 隐患 。
综合船桥系统自动化发展前景探讨

现在, 我们希望现代综合 船桥包括所有功能, 从基 本的航 线计 划 、 迹标 绘 和雷 达 功 能 到 ( 人值 守 机 舱 航 无 内的) 机器监视、 通讯 、 货物 处理、 压载、 稳定和安全, 以 及 报警 等 。 现代综合船桥是按照人机工程学设计 的中心控制 台( 船舶 控制 中心 ) 。
定人为因素在大小事故中所起的作用。 船桥 操作 员 可 能 重 复 犯 许 多 不 同类 型 的 错 误 , 它 们会影响船舶的安全性和它的周 围环境。假如操作员 试图做正确 的事情 , 按错 了旋 纽, 却 就会发 生激励 错 误; 假如操作员误解 了他所接收 的信息. 就会发生理解 错误 ; 假如起先决策正确, 实行时却 又变更, 会发 而 就 生决策 错误 。这些 错误 类 型 的 发 生可 能 由于 身体 不 适 或劳 累。 也可 能 由于 人 机 接 口的 设 计 缺 陷 。 由于 信 息 不足。 我们很难察觉设计缺陷或软 、 硬件限制。 如果操作员天生就不合格, 或者尽管他很有能力, 但 由于劳累而不适。 或者对他 的培训不够, 他就有可能 作出错误决策。相反。 尽管他很有能力 、 健康且经过了 培训 , 由于不 合理 的动 机 , 仍 然可 能 会 有 意 做 错事 但 他 例如 。 由于 不 耐 烦 或 航 运 公 司 在 时 间上 对 他 的 压 力, 操作员可能不愿意在大雾中降低船舶速度。
器维护减少 了, 船上 只需 要搭载一名工程师。为其它 任务 引进 的 自动 化 系 统 进 一 步 减 少 了 船 员 , 些 任 务 这 包括 舱 口盖 启 闭 自动 化 , 泊操 作 的改 进 和船 桥 对 货 系 物 的监视 ( 守器 执行 的 另~项 工 作) 值 。 在考 虑 减少 船 员人 数 时 , 要 的标 准 是 应 确 保 船 主 舶 安全性 、 有效性 、 护性 和可 靠性 不 会降 低 。 维 既然如 此 。 船舶 的设 计 和 装 备 就 应 使 船 员 人 数 的 减少 与工 作 负担 的 同等 减 少 相 适 应 , 时 发 生 事 故 和 同 设备故障的可能性也不会增加。船员应该得到关于设 计 变化 和操 作过 程变 化 的 足够 培 训 。在 试 图 改变 船 舶 设 计和 操作 时 , 不仅要 考 虑 减 少船 员 人 数 , 要把 它 当 还 做改进船舶效率 和安全性 的机会。因此, 必须深入考 虑 下列领 域 : 航性 , 括稳 定性 、 度 和水 密 性 ; 行 适 包 强 航 和 操纵 ; 货物 操 作 、 理 和 监 管 ; 泊 ; 防 灭 火 ; 身 处 系 消 人 安全、 救操作、 营 弃船 以及 污染 控制 。 历史上。 对紧急情况 的处置需要大 量劳力。人 员 配备 最小 化 的船舶 能够 负责 海上 营 救 吗 ?营 救 需要 多 少 人 ?船 上应 该 留多少 人 ? 救生 艇 的 下水 和 回收也 需
船桥系统(IBS)

一、综合船桥系统(IBS)概述文章来源:中国船员招募网点击数:273 更新时间:2011年11月01日随着世界海运事业的发展,船舶数量越来越多,船舶朝大型化、高速化方向发展,船舶的航行安全显得越来越重要,这客观上推动着船舶导航与自动化驾驶技术的发展。
为了提高船舶导航的效率、可靠性和安全性,早期独立工作的导航设备渐渐综合集成一种新型的船舶自动航行系统——综合船桥系统(IntegratedBridge System)。
目前的集成驾驶台系统主要是对现有的各种设备的组合、信息的综合显示以及简单的航行管理(Voyage Management),对便于驾驶员观测,减轻其工作负担起到一定的作用。
未来的集成驾驶台系统中更加强调认知集成(Cognitive Integration)而不仅仅是设备的集成,集成驾驶台系统中将包括更多的传感器,数据融合技术(Data Fusion)将对来自众多的传感器的测量数据进行综合处理有很大帮助。
专家系统(Expert System)为自动航行和自动避让提供了有力的手段。
人工神经网络(ANN),遗传(GA)算法,以及模糊控制理论的不断发展和成熟,也将为集成驾驶台系统提供更多的理论工具和控制算法。
集成驾驶台系统将更加强调信息的深层次处理,充分发挥计算机的快速计算和推理能力,起到态势分析、危险评估、决策支持,智能导航,自动驾驶的作用。
总之未来的集成驾驶台系统成为集导航(定位、避碰)、控制、监视、通信笔货物管理于一体的船舶综合管理系统,更加重视信息的集成,如LITTION MARINE SYSTEMS将其下一代集成驾驶台系统命名为综合船舶信息系统-ISIS(Integrated Ship Information System),并逐步朝着船舶自动驾驶、自动避让以及自动靠离码头的智能化和全自动化的方向发展。
综合船桥系统IBS(Integrated Bridge System)是在综合导航系统INS(Integrated Navigation System)的基础上发展起来的一种新型、功能更强的海上自动航行系统。
综合舰桥系统综述

d gtls i .T ep p r ie e e a r s na in t t e b r i g a d d v lp n f h tg a e r g y tm , ii h p h a e v sa g n r l e e tt h it n n e e o me t e i e td b d es s a g p o o h ot n r i e
高 。而港 口设施 陈 旧和 航 道 交 通拥 挤 , 上 又无 避 船
主要使 命是 实现 船 舶航 行 自动 化 , 高航 行 的安 全 提 性 、 济性和有 效性 。 经
综 合舰 桥 系统 WIS Wasi Itga dB d e B ( r p ne t r g h r e i
及作 战需求 而研制 的 与现代 化作 战系统 、 力系 统 、 动
电力系统 、 航务管理系统等相适应的舰用综合船桥
早期 船 桥上 的 仪表 和 设 备 都是 各 自独 立安 装 ,
+ [ 收稿 日期 ]0 7— 2 20 7— 0 [ 作者简介] 林伟 国(9 2 7 , , 16 . 一) 男 汉族 , 浙江象山人 , 高级工程 师, 从事船舶设计审查工作。 王立新 (9 13一) 男 , 17 . , 汉族 , 江苏张家港人 , 高级工 程师 , 事舰船观通设计工作 。 从
统 的主要特 点是具 有 完善 的综合 导航 、 自动操船 、 自 动避 碰 、 通信 和航 行 管理 控 制 等 多 种功 能 。 系统 的
综合 船桥系 统的产 生 和发展 是与 不 同时期船 舶 航行 的需 求 和 科 学 技 术 的 进 步 分 不 开 的 。上 世 纪 6 O年代末 7 O年 代初 , 随着 世 界 各 国 海 运 事 业 的 发 展 , 舶数 量 1 船 3益增多 ,吨位越 来 越 大 , 速 不 断提 航
通用型综合船桥系统软件设计与开发

• 139•通用型综合船桥系统软件设计与开发中船航海科技有限责任公司 李松霖 胡春洋 王鸿显 郑鹏宇【摘要】在研究了综合船桥系统在国内外舰船上的应用现状后,指出了该系统模块化、标准化、网络一体化的发展方向。
并在此基础之上,设计开发了一套通用的船桥系统软件,它能快速适配于不同接口的设备,也能缩短不同型号舰船综合船桥系统的开发周期,并且能降低系统维修维护的成本。
最后,对发展前景进行了展望与探讨。
【关键词】综合船桥系统;软件设计与开发1.引言由于船舶自动化程度的提高,各种传感器也随之增加。
为提高操船人员的工作效率,而自然地产生了信息综合显示需求,因此在上世纪60年代末诞生了第一代的综合船桥产品——挪威Norcontrol 公司的“数据桥”,该系统能将导航、操舵、雷达目标等信息进行综合集中显示。
它一经面世就得到广泛关注,各航运大国也开始研制自己的船桥系统。
后来随着自动操舵仪、电子海图、网络通讯、计算机技术的引入,船桥系统开始步入快速发展的道路。
1996年,IMO通过决议MSC.64(67),给出了综合船桥系统的定义及性能标准:船桥系统由多个互联互通,但又功能独立的子系统组合而成,它通过工作站不仅能集中显示传感器信息,还能对其发出控制指令,其设计目的在于提高船舶航行安全性及管理效率。
船桥系统需要实现以下功能中的两种或者更多:(1)航路规划、航路监视、航迹控制;(2)通讯;(3)机械控制;(4)装货、卸货、克令吊控制;(5)安全保障。
总的看来,综合船桥系统的发展呈现出模块化、标准化、网络一体化的趋势。
当前我国的船桥系统正处于发展过程中,各船舶总体所也陆续开展了相关的研发工作,但是因为相关设备如ECDIS、导航雷达、自动舵、导航传感器等分别由不同的设备厂家独立研制,缺乏统一的模块化、标准化设计,互操作接口没有做到开放化、网络化,因此在进行系统集成时有接口对接困难,设备间的连接关系复杂、不易维护,缺乏调试手段等问题,从而导致项目周期变长,维护成本高。
综合船桥系统IP雷达设计
信和数据 复用。常规 的导航 雷达天线输 出的是模拟视
频和控制 信号,无法实现 网络 复用 。通过设 计能够输
出网络化雷达数据的 I P雷达 ,以满足综合船桥系统 的
可பைடு நூலகம்性要求 。
集航海 导航、船舶 驾控及 辅助决策于一体 的信 息化 、 自动化 航行系统 ,它采用控 制技术和信 息技术将船舶 航 行时的环境信息 、状 态信息与控制信 息进 行高度综 合 ,从而实现船舶航行的信息化和 自动化【 1 ] 。
综合船桥 系统 I P雷达设计
张礼 伟 , 韦志 恒
( 1 . 海军驻天津航海仪器研究所军事代表室, 天津 3 0 0 1 3 1 ; 2 . 北京海兰信数据科技股份有 限公司,北京 1 0 0 0 9 5 )
De s i g n o f l P Ra da r f o r I nt e g r a t e d Br i dg e S y s t e m
Z h a n g L i we i , We i Zh i h e n g 2
( 1 . Na v y R e p r e s e n t a t i v e O f i f c e a t T i a n j i n I n s t i t u t e o f Na u t i c a l I n s t r u me n t s , T i a n j i n 3 0 0 1 3 1 , C h i n a ; 2 . B e i j i n g Hi g h l a n d e r Di g i t a l T e c h n o l o g y C o . , L t d . , B e i j i n g 1 0 0 0 9 5 , C h i n a )
综合船桥系统与综合导航技术分析
综合船桥系统与综合导航技术分析摘要:随着航海技术的不断进步和导航技术的发展,诞生了集导航与控制、监控等功能于一体的综合船桥系统。
文中介绍了导航技术在船桥系统的诞生和发展过程中的重要地位,介绍了综合船桥系统中典型的导航设备及其功能和性能上的差异,分析了综合导航的几个关键技术。
关键词:综合船桥系统;导航技术;导航雷达;船舶定位。
Analysis of Integrated Bridge System and Integrated Navigation TechnologyHu JinQinhuangdao Unit 91404Abstract:With the continuous progress of navigation technology and the development of navigation technology, an integrated ship bridge system integrating navigation, control monitoring and other functions was developed. This paper introduces the important position of navigation technology in the birth and development of the ship bridge system, and analyzes several key technologies of comprehensive navigation.Key Words:integrated bridge system; navigation technology; navigation radar; ship location.引言:随着科学技术的发展和航海经验的积累,人类对海洋环境的认知逐渐加深。
同时,由于航运业的迅速发展和航运竞争的加剧,海上运输的安全和经济效益一直是航海的重要目标。
综合船桥系统的应用与发展
中外船舶科技2007年第3期综合船桥系统的应用与发展王淑瑛(中船重工集团公司707研究所九江分部江西九江332007)摘要:本文首先描述了美国海军综合船桥系统,叙述了该系统在各类舰船上的应用;然后论述了该系统采用的关键技术,最后阐述了未来船桥系统的发展和展望。
关键词:综合船桥;系统技术;装船应用;关键技术;发展展望综合船桥系统是人员、设备和程序的结合,用以实现船桥所要求的全部功能,这些功能包括导航、机动、通信、监视、管理和安全等等。
该系统被简称为IBS(IntegratedBridgeSystem),是继综合导航系统INS(IntegratedNavigationSystem)问世之后发展起来的海上自动航行系统。
它的问世使延续了几个世纪的导航技术,让位给了综合船桥系统技术,也给船舶导航领域带来了一场变革。
这场变革也对世界各国的船舶工业,包括军船、商船、民船和游船产生了深远的影响。
1导航-几个世纪的传统技术导航被描述为一门科学或一门技术。
称其为科学,是因为它涵盖了仪器、方法、数学等技术的发展和应用;称其为技术,是因为它包含了对这些工具的熟练使用和在使用中获得信息的应用和解释。
大量的工作需要借助精密仪器和精确的数学用表来完成,而且,在进行了观察和计算之后,在确定了“船舶位置在海图某一点上”时,老练的航海家就可以进行一次判断性测量了。
而目前这一过程在很大程度上已由IBS系统自动地完成了。
任何一个曾在海上航行的船桥了望人员都会很容易地注意到综合船桥系统技术以及相对于传统的人工方式的导航和领航技术的先进性。
在传统操作中,需要用较长的时间将罗经的方位、雷达测量的距离、电子测量或者天空观察出的位置变换成标在海图上的航线。
到目前为止,航海者时刻用眼睛盯着那些过时图像,然后,再用船位推算法对航向和速度进行估计以显示实时状态,这样的方法已经过时了。
对现代综合船桥系统来说,从船舶电子传感器,包括平台罗经、计程仪、卫星导航接收机、雷达以及其它设备传递来的数据信息可被自动地接收,然后,再直接送到计算机,并立即转换成彩色电子海图显示的船舶位置、实时状态的单一的综合图像。
科技成果——综合船桥系统
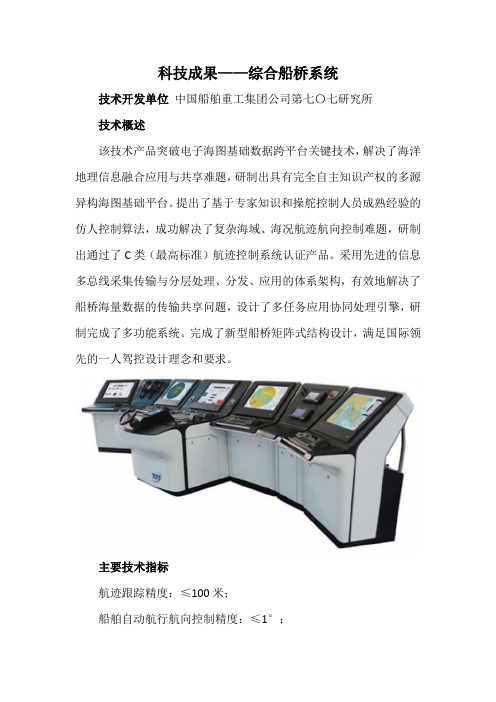
科技成果——综合船桥系统技术开发单位中国船舶重工集团公司第七〇七研究所技术概述该技术产品突破电子海图基础数据跨平台关键技术,解决了海洋地理信息融合应用与共享难题,研制出具有完全自主知识产权的多源异构海图基础平台。
提出了基于专家知识和操舵控制人员成熟经验的仿人控制算法,成功解决了复杂海域、海况航迹航向控制难题,研制出通过了C类(最高标准)航迹控制系统认证产品。
采用先进的信息多总线采集传输与分层处理、分发、应用的体系架构,有效地解决了船桥海量数据的传输共享问题,设计了多任务应用协同处理引擎,研制完成了多功能系统。
完成了新型船桥矩阵式结构设计,满足国际领先的一人驾控设计理念和要求。
主要技术指标航迹跟踪精度:≤100米;船舶自动航行航向控制精度:≤1°;支持海图数据格式:3种以上。
技术特点具有导航、驾控、避碰、报警管理和最佳航线设计、航行态势监控等功能,单操控台实现电子海图、雷达和综合信息显示系统同步工作及动态备份功能。
符合国际海事组织规范的综合信息显示和报警集中管理功能。
仿真与试验检测平台涵盖三大主流船型的船舶运动模型和六级以下海况模拟功能,支撑综合船桥系统及关键设备的仿真试验、系统联调和功能指标验证。
适用范围适用于各种船舶在无限航区、全级海况使用。
专利状态授权专利16项技术状态小批量试制阶段合作方式(1)投资需求。
寻求投资扩大产能,产值达到1亿元/年,资金需求2亿元,实施周期24个月。
(2)合作研发。
与小型船用电子设备厂商和船舶制造厂等上下游厂商合作,形成船用电子设备集成打包能力。
(3)技术服务。
为寻求单位提供设计开发、集成打包、试验检测和培训等服务。
预期效益我国已经成为世界主要海洋工程装备制造大国之一,海洋工程市场需求巨大,综合船桥系统是船舶自动化的核心技术,是世界各造船强国对我国实施技术垄断、封锁和控制的重要高新技术领域,市场前景广阔。
建设完成后预计实现年产值3-5亿元。
综合船桥系统

INS
IBS
1-3-2 综合导航系统(INS)
(二)主要功能
1. 传感器信息综合处理 对象: 主要包括时间、位置、航向、航速等综合处理 目的: 提高信息的有效性、可靠性、精度等。
2. 定位与导航:基本功能
航路点、航线、定点及报警 自动显示定位与导航数据 自动将本船航迹标绘在 ECDIS
1-3-3 IBS
二、IBS组成
系统包括三大部分
Ⅰ 导航及气象传感器 Ⅱ 航行管理子系统 Ⅲ 数字式自动操舵仪
以美国SPERRY
IBS-2000型为例﹙装“远望三号”﹚:
1、导航及气象传感器
GPS、气象仪等各种导航、气象信息,经接口RS-232/422及网络信息 单元NIU、滤波网络连接中心NWC航行管理命令站VMS; RD/ARPA信息经光栅扫描转换(RASCAR)VMS。
图 模 块
打 印 机
航 迹 仪
文 本 显 示
专 用 键 盘
惯 导 1
惯 导 2 舰艇用
指 控 系 统
海 图 存 储
组1
航 行 记 录
组2
多 媒 体
组3
IBS
SPEERY IBS-2000 型系统框图
导航雷达 传感器
CRS SPD X波段 RD显示 CRS SPD S波段 RD显示 转换 开关 打印 机 7) AC110V ADG 自动操舵仪 标绘 仪6) VMS 2) 航行管理命令站 彩显
位置
INS (B) INS Leabharlann C) 2雷达ECDIS
INS(C)航向、航迹、航速控制 并监视控制性能
1 AIS INS(B)显示计划航线有关的导航信息 并报告和监测危险情况
INS(A)综合各种导航传感器信息, 提供完整准确导航信息
综合船桥系统航海仪器数据干扰值处理方法
第17卷 第8期 中 国 水 运 Vol.17 No.8 2017年 8月 China Water Transport August 2017收稿日期:2017-05-10作者简介:丁文刚(1978-),男,湖北黄陂人,海南海警筹备组,研究方向为航海学。
综合船桥系统航海仪器数据干扰值处理方法丁文刚(海南海警筹备组,海南 海口 570000)摘 要:现如今,我国航海事业发展效果良好,航海领域持续发展的同时,船舶数量也在逐渐增多,进而船舶运行的安全性成为人们普遍关注的焦点,综合船桥系统航海仪器应显示准确数据。
针对数据干扰值采用有效方法予以处理,能够有效排除干扰,提高船舶运行的安全性。
关键词:船桥系统;航海仪器;干扰值;数据处理中图分类号:U666.1 文献标识码:A 文章编号:1006-7973(2017)08-0134-02前言船舶航行风险多数来源于虚拟仪表的非正确数据控制和显示,针对干扰值采取正确方法进行识别和处理,能够降低干扰值的负面作用,以此提高数据的准确性,降低航行风险性。
随着社会科技的不断进步,一阶差分法、α-β滤波处理法应用而生,并且现已成为干扰值处理的有效方法,具体分析如下。
一、综合船桥系统基本介绍该系统主要应用于船舶导航、船舶有效控制,该系统具有集成性特点,同时,这一系统能够对传感器信息有序整合、连接,在传感器信息命令正确实施的基础上,还能促进船舶顺利运行,提高船舶的实用效率,在部队当中得到了广泛的应用。
该系统简称为IBS,产生于上世纪70年代,以综合导航系统为发展基础。
这一系统在社会不同发展时期,发挥着不同的系统数据优势,为当时的船舶航行提供了发展保障和有力支持。
随着科技水平的提高,该系统不断升级、创新,系统功能逐渐丰富,加快了船舶的航行的自动化进程[1]。
二、数据干扰值处理方法分析 1.一阶差分法运用该方法计算第M 次仪器输出值,可用计算公式为:)(ˆ211----+=m m m m X X X X 为了尽可能的缩小预测误差,应利用数据输出变化频率9倍以上进行采样频率获取。
高速艇的综合船桥系统

表 ( 图 1。 见 )
疑 问 , 船 舶建 造者 和 船舶 而 言 , 关 注 的 是 有关 船 舶 对 最 防损 、 防 、 靠性 和 船舶 系 统 供 应 上 的可 靠 性 等方 面 消 可 的规章 和 标准 。对 于 开发 和 建 造 用 于运 载 乘 客和 车 辆 的高速 艇 来说 , 代导 航 和 电子 设 备 的 引进 , 现 以及 为航 行 安全 、 进 系 统 安 全 和 全 面 的 环 境保 护 而 设 计 的综 推 合计 算机 信 息 系 统 , 正变 得 日益 重 要 。 设 备 和 单 元 统
色显 示 屏上 的画面 。每位 领 航 员 的 前 方 都 有 一 个 显 示
屏。
1 船 舶座舱 系统 Sa oki的基本概念 eC cp t
船 舶 座舱是 用 于 高速 艇 的综 合 船桥 导 航 系 统 。其 设 计 理念 是 使 现 代 高 速 艇 在 恶 劣 海 况 中也 能 高 速 航
产者 必须 与客 户合 作 。
ห้องสมุดไป่ตู้
船舶 座 舱是 达到 最新 技 术 发 展 水平 的综 合 导航 系
统, 用于 高速 艇 , 以提 供 安 全 的航 行 , 可 以及 有 效 的安
船 舶 座舱 概 念 的 基 础 是 非 常 紧 凑 的 物 理 布 局 。 以 及 将重 要 的 信 息 综 合 起 来 , 实 现 航 行 的 安 全 。 船 舶 以
利用 局域 数据 网、 太 网 , 以将 所 有 S aok i计 算 以 可 e C cpt
的基 础上 , 动 机 速 度 计 算 ( ) 示 ; 在 来 自船 发 R 显 ⑨
综合船桥系统通讯网络设计
天津航海
2 1 年第 1期 01
综 合 船桥 系统 通讯 网络 设 计 冰
张 崇猛 宋超 周 志永 郑 荣 才
( 津航 海仪 器研 究所 天 天 津 30 3 ) 0 11
摘
议 。
要: 综合船桥 系统通信网络是船舶 自 动化 系统的核心组成部分。文章在研 究国外
船桥 系统 网络通 信技 术 的基础 上 , 重点探 讨 了综合船 桥 系统 网络 体 系结 构 以及 相 关 的通 信协
2 中层 网 络 为 lM l0 l0 M 自适 应 交 换 ) 0 / 0 0O
数据分配系统和多种导航传感器 ( 如罗经、 P 、 I G SA S 等) 进行有机地组合 , 实现 了船舶导航 、 驾控 、 避碰 和安全管理等功能的综合集成 , 最大限度地提高 了 船舶航 行 的效 率 和安全 性 。 由此 可见 网络 技术是 综
中华 人 民共 和 国 科技 部 支 持 项 目 。 目号 (0 6 A 0 D 4 项 20B G 3 0 )
收稿 日期 : 1 2—1 2 0—1 5 0
为满 足系 统 对 外 通 信 要 求 , 线 接 入 网 由 I— 无 n
作者 简介 : 张崇猛 ( 9 5一) 男 , 17 , 山东 省人 , 高级 工程 师 , 主 要从事舰船 总体设计工作 。
I E 8 2 3以太 网的 帧 格式 , 向后 兼 容传 统 的 网 E E 0. 可
络 通信 介 质 , 支 持 通 过 C MA C 协议 的全双 工 并 S /D
和半 双工传 输 。
为了保证网络高速 、 可靠运行、 支持海图数据、 雷达视频图像、 R A目标 、 AP 各类导航数据及监控数 据的实时传输要求 , 同时可与船舶各部门子网互联、
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
IBS
3、数字式自动舵
能对船舶装载、航速及风、流、浪等航行环境变化,联机实时辨识出 变化后的船舶操纵运动数学模型及干扰模型,并以此自动改变操舵规 律。自适应数控舵具有滤波与自适应能力,控制精度高,操舵次数少, 经济效益高等优点。
三、工作原理
通过电气组合和机械组合将船舶众多内外设备和系统 组合在一起,进行综合处理与控制。
4)高速数据通信网络NIU-Network Information Unit:: 原用 SeaNet 记号 数据通信网络,现可进Internet网。 5)数字化仪Digitizer : 用于人工输入海图信息。 6)标绘仪Plotter : 用于绘制数字地图;检测EC库容量;在纸海图上标绘船位; 任意缩放、 局部放大、选择投影方式;选择海图投影坐标。 7)打印机:实时数据记录,航线航行数据硬copy.
INS
IBS
(二)主要功能
3. 避碰 Radar/ARPA,AIS,遵照避碰规则避让 4、航线设计
★ 经济航线 ◆ 恒向线 ◆ 大圆航线 ◆ 混合航线 ★ 气象航线 5、Radar/ECDIS overlay
★ 雷达图像叠加 ECDIS ★ ARPA 目标叠加 ECDIS
INS
IBS
6、电子海图
IBS
1.3 综合驾驶台系统
(IBS —— Integrated Bridge System)
1-3-1
1、什么是IBS?
IBS 概述
集导航、监控、管理、显示于一体的智能化、网络化的综合航行管 理系统。它通过相互连接以集中使用来自工作站的传感器信息、命 令或控制,其目的是提高操作人员管理船舶的安全性和效率。
IBS
2、航行管理子系统组成及主要性能
1) 航行工作站NWS-Navigation Working Station 用微机、彩显,
功能如下: (1). 可接收标准ENC,或人工输图; (2). 组导功能; 经网络信息单元(NIU-Network Information Unit) ;
可接收CRS、SPD、风向、风速等数据,综合处理送彩色显示。
(3). 制订航行计划; (4). 存储数据及管理文件; (5). 打印
IBS
2)航行管理命令站 VMS-Vessel Management Station (1)实时显示航行态势、信息; (2)发布按航线计划的转向命令; (3)发布保持航迹的修正航向命令; (4)按预定抵港时间调节航速; (5)数据记录(打印); (6)安全航行报警:接近转向点,船位、航速数据消失等。 3)船位滤波器(PFM):用Kalman 滤波器。
图 模 块
打 印 机
航 迹 仪
文 本 显 示
专 用 键 盘
惯 导 1
惯 导 2 舰艇用
指 控 系 统
海 图 存 储
组1
航 行 记 录
组2
多 媒 体
组3
IBS
SPEERY IBS-2000 型系统框图
导航雷达 传感器
CRS SPD X波段 RD显示 CRS SPD S波段 RD显示 转换 开关 打印 机 7) AC110V ADG 自动操舵仪 标绘 仪6) VMS 2) 航行管理命令站 彩显
2、完成任务:
航路执行与监控 通信 机械控制 装卸载和货运管理 航行安全与船舶保安 系统管理
IBS
3. IBS发展?
航海发展
大型化、自动化及高速化的船舶发展新趋势,要 求经济性(省时、省耗)、安全性,对导航提出更 高的要求。 要求高精度、高可靠性、全球全天候、连续以至 自动导航
功能
提供有效的、正确的、统一的参考坐标系 提供船舶的位置、速度、航向、时间 传感器故障时发出报警
配置
陀螺罗经 磁罗经 多罗经组合 计程仪 EPFS 测深仪
IBS
1-3-2 综合导航系统(INS)
(三)分类及配置
2、INS(B) 功能 除INS(A)包括功能外
INS
IBS
12、综合信息显示 13、 数据通讯 VHF、GMDSS、广域/局域网络、接口模块电路 14、消防控制等自动控制 消防、看仓、理货、自动靠离码头 15、数据装载 装载量、吃水、倾斜、稳性、强度、剪应力、 弯矩计算
INS
IBS
1-3-2 综合导航系统(INS)
(三)分类及配置
1、INS(A)
1-3-3 IBS
二、IBS组成
系统包括三大部分
Ⅰ 导航及气象传感器 Ⅱ 航行管理子系统 Ⅲ 数字式自动操舵仪
以美国SPERRY
IBS-2000型为例﹙装“远望三号”﹚:
1、导航及气象传感器
GPS、气象仪等各种导航、气象信息,经接口RS-232/422及网络信息 单元NIU、滤波网络连接中心NWC航行管理命令站VMS; RD/ARPA信息经光栅扫描转换(RASCAR)VMS。
IBS
(二)主要功能
7、自动驾驶
设计航线 航迹保持
定位导航 自动舵 自动改向 航行于预定航线
INS
IBS
8、航行数据记录: VDR 9、安全信息测试 ★ 海图安全检查 ★ 危险区域安全检查 ★ 传感器位置监测 10、自检与报警 ★ 设备故障报警:设备本身故障 ★ 工作报警(系统工作状态报警) 11、模拟训练:辅助工作台
位置
INS (B) INS (C) 2
雷达
ECDIS
INS(C)航向、航迹、航速控制 并监视控制性能
1 AIS INS(B)显示计划航线有关的导航信息 并报告和监测危险情况
INS(A)综合各种导航传感器信息, 提供完整准确导航信息
A B C 关系
IBS
导航线
C
XTE
自动驾驶
发展
IBS
电子海图与雷达图像叠加
19’’ 彩显 监视 19’’ 彩显 监视
键 盘
鼠 标
GYRO1 GYRO2 航角指示
网络连接单 元/船位滤 波器 3)
数字 化仪 5)
转速表/左右
航行管理 子系统
IBS
IBS 水深 航向 时间
INS与IBS关系 7 6 5 航路执行 IBS 4
INS (A)
航速Leabharlann 31. 航向或航迹控制 2. 航速控制 3. 机械控制 4. 系统管理 5. 航行安全与船舶保 安 6. 装卸载和货运管理 7. 通信
发展3
IBS
IBS实物图一
概念
发展
IBS
IBS实物图二
概念
发展
IBS
IBS 实物图三
概念
发展4
IBS
IBS实物图四
概念
原理
IBS
综 合 显 示 1
综合显示
IBS
综 合 显 示 2
综合显示
单独的、多种的导航设备存在问题?
分散、可靠性差、精度差、功能单一、驾驶员负担
想法?
组合 优势互补
起始?
70年代的早期INS : 定位传感器的组合
IBS
1-3-2 综合导航系统(INS)
INS—Integrated Navigation System
(一)组成
是一种借助电子计算机,将不同特点的各种导航设备(或 系统)有机地结合在一起,通过对多种导航信息的综合处 理,提高导航精度和可靠性的导航技术或方法,扩大单设 备功能,提高导航性能。
INS
IBS
1-3-2 综合导航系统(INS)
(二)主要功能
1. 传感器信息综合处理 对象: 主要包括时间、位置、航向、航速等综合处理 目的: 提高信息的有效性、可靠性、精度等。
2. 定位与导航:基本功能
航路点、航线、定点及报警 自动显示定位与导航数据 自动将本船航迹标绘在 ECDIS
IBS
1-3-3 IBS
四、IBS配置 看书中表格 ECDIS强制安装
IBS
五、IBS优点及发展趋势 1、优点
1)具有综合信息 航行安全性; 2)自动化程度高 可减员增效; 3)可控制船舶,以最经济的航速航行在最安全航线 省燃料, 提高船舶周转率,提高航运效益。
2、发展趋势
朝着标准化、数字化、模块化、小型化、智能化; 接口标准化等方向发展、完善 最终形成新型技术集成导航系统。
IBS
远望三号是中国自行设计建造的第二代航天远洋测量船, 于1994年4月在上海江南造船厂建成下水。在远望号序列 中,远望三号设计合理,装备先进,设施完善,在中国首 次十大名船评比中,它以“海上科学城”的美誉,荣膺“ 中国十大名船”称号。2006年,远望三号船进行了十年一 次中修技术改造,改造后,其海上综合测控能力达到当今 国际先进水平。该船先后执行过鑫诺、亚太等卫星和所有 神舟号系列飞船的海上测控任务,成功率达100%。
IBS
系统组成框图
导航传感器 电 磁 Log 多 普 勤 Log LN | C
舰艇用 GPS / DGPS
模 球 图 形 显 示 器 C3I 支 持 直 接 提 供 数 据
操 船 自 动 舵
罗 经
测 深
RD/ ARPA
智 能 I/O 模 块 多 总 线 管理模块 综合处理模块 操 船 数 据
电 子 海
数控自 动舵 导 航 气 象 传 感 器
CRS SPD
测深仪
Log LN-C GPS 气象仪
接 口 板
转 换 开 关
NIU 4) / PFM 高速数 据通信 网络
NWS 1) 航行工作站处理机
RS 232/422
AC 110V
PS 计算机电源 AC 110V NWC 网络连接中心
19’’ 彩显 监视
一、IBS发展概况
20世纪60-70年代
功能:初步出现具有导航线功能 基础:先进雷达 特征:在雷达上计划航线和导航避险线