机械原理作业册答案
机械原理习题册答案
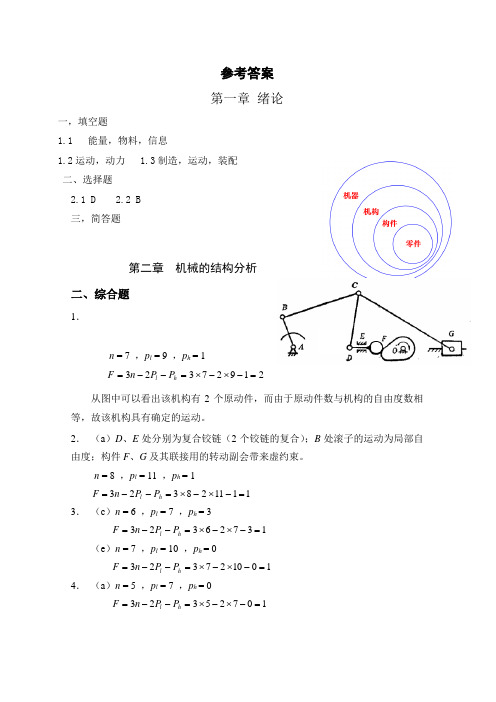
参考答案 第一章 绪论一,填空题1.1 能量,物料,信息1.2运动,动力 1.3制造,运动,装配 二、选择题2.1 D 2.2 B 三,简答题第二章 机械的结构分析二、综合题1.n = 7 ,p l = 9 ,p h = 121927323=-⨯-⨯=--=h l P P n F从图中可以看出该机构有2个原动件,而由于原动件数与机构的自由度数相等,故该机构具有确定的运动。
2. (a )D 、E 处分别为复合铰链(2个铰链的复合);B 处滚子的运动为局部自由度;构件F 、G 及其联接用的转动副会带来虚约束。
n = 8 ,p l = 11 ,p h = 1111128323=-⨯-⨯=--=h l P P n F3. (c )n = 6 ,p l = 7 ,p h = 313726323=-⨯-⨯=--=h l P P n F(e )n = 7 ,p l = 10 ,p h = 0101027323=-⨯-⨯=--=h l P P n F 4. (a )n = 5 ,p l = 7 ,p h = 010725323=-⨯-⨯=--=h l P P n FⅡ级组 Ⅱ级组 因为该机构是由最高级别为Ⅱ级组的基本杆组构成的,所以为Ⅱ级机构。
(c )n = 5 ,p l = 7 ,p h = 010725323=-⨯-⨯=--=h l P P n FⅢ级组因为该机构是由最高级别为Ⅲ级组的基本杆组构成的,所以为Ⅲ级机构。
5. n = 7 ,p l =10 ,p h = 0101027323=-⨯-⨯=--=h l P P n FⅡ级组 Ⅲ级组当以构件AB 为原动件时,该机构为Ⅲ级机构。
Ⅱ级组 Ⅱ级组 Ⅱ级组当以构件FG 为原动件时,该机构为Ⅱ级机构。
可见同一机构,若所取的原动件不同,则有可能成为不同级别的机构。
6. (a )n = 3 ,p l = 4 ,p h = 101423323=-⨯-⨯=--=h l P P n F因为机构的自由度为0,说明它根本不能运动。
机械原理作业集参考答案
机械原理作业集参考答案(注:由于作图误差,图解法的答案仅供参考)第一章 绪论1-1~1-2略第二章 平面机构的结构分析2-1 F =12-2 F =12-3 F =12-4 F =12-5 F =0机构不能运动。
2-6 F =1 C 、F 为复合铰链,I 为局部自由度, EFGC 为虚约束。
2-7 F =1 C 为复合铰链,F 、I 为局部自由度。
2-8 F =2 A 、B 为复合铰链,B '为虚约束。
2-9 F =1机构由3个 II 级杆组组成,为II 级机构。
2-10 F =1 AB 为原动件,机构由3个 II 级杆组组成,为II 级机构。
EG 为原动件,机构由1个 II 级杆组、1个 III 级杆组组成,为III 级机构。
2-11 F =1高副低代后,机构为III 级机构。
2-12 F =1高副低代后,机构为III 级机构。
2-13 F =1高副低代后,机构由4个 II 级杆组组成,为II 级机构。
第三章 平面机构的运动分析3-1 略3-2 (1)(2) (3) ϕ=26°、227°3-33-4略 s m v C /40.0=sm v E /36.0=1613361331P P P P =ωω3-5 3-6略 3-7 (a )、(b )存在, (c )、(d )不存在。
3-8略3-9 3-10 3-11 3-12略3-13略3-14 第四章 平面机构的力分析4-14-2 F =1430N4-3~4-7略第五章 机械的效率和自锁5-1 η=0.575-2 η=0.22,Q =10298N5-3 η=0.82,P =8.03kw5-4 η=0.63,P =9.53kw5-5 α ≤ 2ϕ5-6 F =140N ,自锁5-7 效率不自锁条件:255/71.0/292.0s m a sm v ==233/8/2s rad srad =α=ω233/5.11/6.2s rad srad =α=ωsm v D /2.2=232/95.110s m v -==ω)sin )((211212l l l l l l f f V ++θ+=)tan(tan tan )tan(ϕ+αα=η'αϕ-α=ηϕ-<α<ϕ 90第六章 机械的平衡6-1 6-2 静平衡,轴动不平衡。
机械原理课后习题答案

机械原理课后习题答案1. 两个质量分别为m1和m2的物体,它们分别靠在光滑水平面上的两个弹簧上,两个弹簧的弹性系数分别为k1和k2。
求当两个物体分别受到的外力分别为F1和F2时,两个物体的加速度分别是多少?答,根据牛顿第二定律,物体受到的合外力等于物体的质量乘以加速度,即F=ma。
根据这个公式,可以得出两个物体的加速度分别为a1=F1/m1,a2=F2/m2。
2. 一个质量为m的物体,靠在光滑水平面上的弹簧上,弹簧的弹性系数为k。
求当物体受到外力F时,物体的加速度是多少?答,同样根据牛顿第二定律,物体受到的合外力等于物体的质量乘以加速度,即F=ma。
根据这个公式,可以得出物体的加速度为a=F/m。
3. 一个质量为m的物体,靠在光滑水平面上的弹簧上,弹簧的弹性系数为k。
求当物体受到外力F时,弹簧的位移是多少?答,根据胡克定律,弹簧的位移与受到的外力成正比,即F=kx,其中x为弹簧的位移。
解出x=F/k,即弹簧的位移与外力成反比。
4. 一个质量为m的物体,靠在光滑水平面上的弹簧上,弹簧的弹性系数为k。
求当物体受到外力F时,弹簧的振动周期是多少?答,根据弹簧的振动周期公式T=2π√(m/k),可以得出弹簧的振动周期与物体的质量和弹簧的弹性系数有关,与受到的外力无关。
5. 一个质量为m的物体,靠在光滑水平面上的弹簧上,弹簧的弹性系数为k。
求当物体受到外力F时,弹簧的振幅是多少?答,根据弹簧振动的公式x=Acos(ωt+φ),可以得出弹簧的振幅与受到的外力无关,只与弹簧的弹性系数和物体的质量有关。
求当物体受到外力F时,弹簧的振动频率是多少?答,根据弹簧振动的公式f=1/2π√(k/m),可以得出弹簧的振动频率与受到的外力无关,只与弹簧的弹性系数和物体的质量有关。
7. 一个半径为r的圆盘,靠在光滑水平面上的弹簧上,弹簧的弹性系数为k。
求当圆盘受到外力F时,圆盘的加速度是多少?答,根据牛顿第二定律,物体受到的合外力等于物体的质量乘以加速度,即F=ma。
机械原理作业册答案
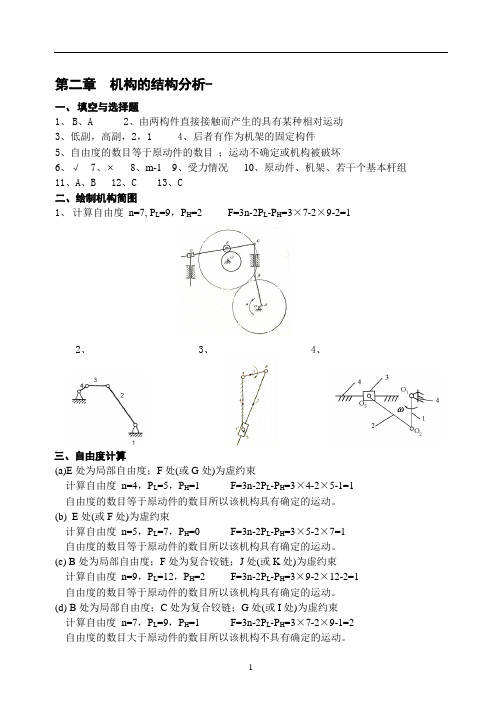
第二章机构的结构分析-一、填空与选择题1、B、A2、由两构件直接接触而产生的具有某种相对运动3、低副,高副,2,14、后者有作为机架的固定构件5、自由度的数目等于原动件的数目;运动不确定或机构被破坏6、√7、8、m-19、受力情况10、原动件、机架、若干个基本杆组11、A、B 12、C 13、C二、绘制机构简图1、计算自由度n=7, P L=9,P H=2 F=3n-2P L-P H=3×7-2×9-2=12、3、 4、三、自由度计算(a)E处为局部自由度;F处(或G处)为虚约束计算自由度n=4,P L=5,P H=1 F=3n-2P L-P H=3×4-2×5-1=1自由度的数目等于原动件的数目所以该机构具有确定的运动。
(b)E处(或F处)为虚约束计算自由度n=5,P L=7,P H=0 F=3n-2P L-P H=3×5-2×7=1自由度的数目等于原动件的数目所以该机构具有确定的运动。
(c) B处为局部自由度;F处为复合铰链;J处(或K处)为虚约束计算自由度n=9,P L=12,P H=2 F=3n-2P L-P H=3×9-2×12-2=1自由度的数目等于原动件的数目所以该机构具有确定的运动。
(d) B处为局部自由度;C处为复合铰链;G处(或I处)为虚约束计算自由度n=7,P L=9,P H=1 F=3n-2P L-P H=3×7-2×9-1=2自由度的数目大于原动件的数目所以该机构不具有确定的运动。
(e) 构件CD(或EF)及其两端的转动副引入一个虚约束计算自由度n=3,P L=4,P H=0 F=3n-2P L-P H=3×3-2×4=1自由度的数目等于原动件的数目所以该机构具有确定的运动。
(f) C处为复合铰链;计算自由度n=7,P L=10,P H=0 F=3n-2P L-P H=3×7-2×10=1自由度的数目等于原动件的数目所以该机构具有确定的运动。
机械原理课后习题答案

《机械原理》课后习题答案第2章(P27)2-2 计算下列机构的自由度,如遇有复合铰链、局部自由度、虚约束等加以说明。
(a)n=3,p l=3 F=3*3-2*3=3(b)n=3,p l=3,p h=2 F=3*3-2*3-2=1 (B处有局部自由度)(c)n=7,p l=10 F=3*7-2*10=1(d)n=4,p l=4,p h=2 F=3*4-2*4-2=2 (A处有复合铰链)(e)n=3,p l=4 F=3*3-2*4=1 (A或D处有虚约束)(f)n=3,p l=4 F=3*3-2*4=1 (构件4和转动副E、F引入虚约束)(g)n=3,p l=5 F=(3-1)*3-(2-1)*5=1 (有公共约束)(h)n=9,p l=12,p h=2 F=3*9-2*12-2=1 (M处有复合铰链,C处有局部自由度)2-3 计算下列机构的自由度,拆杆组并确定机构的级别。
(a)n=5,p l=7 F=3*5-2*7=1由于组成该机构的基本杆组的最高级别为Ⅱ级杆组,故此机构为Ⅱ级机构。
(b)n=5,p l=7 F=3*5-2*7=1此机构为Ⅱ级机构。
(c)n=5,p l=7 F=3*5-2*7=1拆分时只须将主动件拆下,其它构件组成一个Ⅲ级杆组,故此机构为Ⅲ级机构。
2-4 验算下列运动链的运动是否确定,并提出具有确定运动的修改方案。
(a)n=3,p l=4,p h=1 F=3*3-2*4-1=0 该运动链不能运动。
修改方案如下图所示:(b)n=4,p l=6 F=3*4-2*6=0 该运动链不能运动。
修改方案如下图所示:或第3章(P42)3-2 下列机构中,已知机构尺寸,求在图示位置时的所有瞬心。
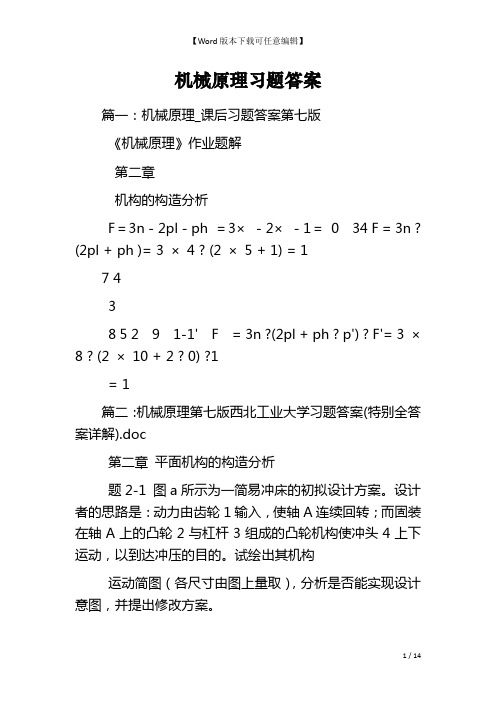
(a)(b)(c)(a) v3=v P13=ω1P14P13μl3-6 在图示齿轮连杆机构中,三个圆互作纯滚,试利用相对瞬心P13来讨论轮1与轮3的传动比i13。
第5章(P80)5-2 一铰接四杆机构(2)机构的两极限位置如下图:(3)传动角最大和最小位置如下图:5-3题略解:若使其成为曲柄摇杆机构,则最短杆必为连架杆,即a 为最短杆。
机械原理作业册答案
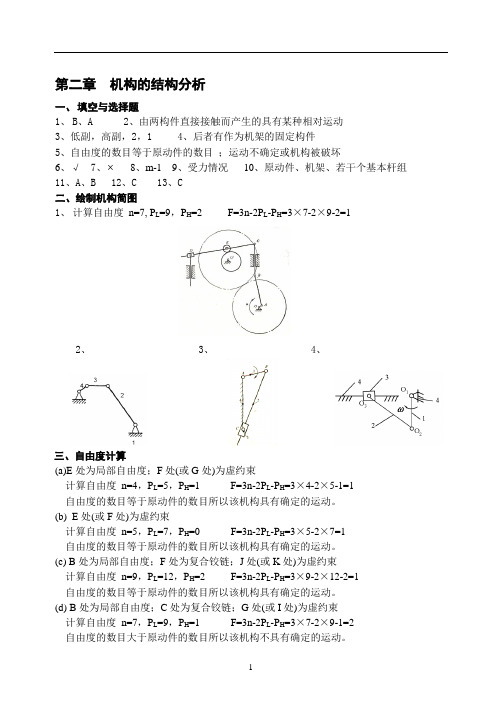
第二章机构的结构分析一、填空与选择题1、B、A2、由两构件直接接触而产生的具有某种相对运动3、低副,高副,2,14、后者有作为机架的固定构件5、自由度的数目等于原动件的数目;运动不确定或机构被破坏6、√7、8、m-19、受力情况10、原动件、机架、若干个基本杆组11、A、B 12、C 13、C二、绘制机构简图1、计算自由度n=7, P L=9,P H=2 F=3n-2P L-P H=3×7-2×9-2=12、3、 4、三、自由度计算(a)E处为局部自由度;F处(或G处)为虚约束计算自由度n=4,P L=5,P H=1 F=3n-2P L-P H=3×4-2×5-1=1自由度的数目等于原动件的数目所以该机构具有确定的运动。
(b)E处(或F处)为虚约束计算自由度n=5,P L=7,P H=0 F=3n-2P L-P H=3×5-2×7=1自由度的数目等于原动件的数目所以该机构具有确定的运动。
(c) B处为局部自由度;F处为复合铰链;J处(或K处)为虚约束计算自由度n=9,P L=12,P H=2 F=3n-2P L-P H=3×9-2×12-2=1自由度的数目等于原动件的数目所以该机构具有确定的运动。
(d) B处为局部自由度;C处为复合铰链;G处(或I处)为虚约束计算自由度n=7,P L=9,P H=1 F=3n-2P L-P H=3×7-2×9-1=2自由度的数目大于原动件的数目所以该机构不具有确定的运动。
(e) 构件CD(或EF)及其两端的转动副引入一个虚约束计算自由度n=3,P L=4,P H=0 F=3n-2P L-P H=3×3-2×4=1自由度的数目等于原动件的数目所以该机构具有确定的运动。
(f) C处为复合铰链;计算自由度n=7,P L=10,P H=0 F=3n-2P L-P H=3×7-2×10=1自由度的数目等于原动件的数目所以该机构具有确定的运动。
机械原理习题答案
机械原理习题答案篇一:机械原理_课后习题答案第七版《机械原理》作业题解第二章机构的构造分析F=3n-2pl-ph =3×-2×-1=0 34 F = 3n ? (2pl + ph )= 3 ×4 ? (2 ×5 + 1) = 17 438 5 2 9 1-1' F = 3n ?(2pl + ph ? p') ? F'= 3 ×8 ? (2 ×10 + 2 ? 0) ?1= 1篇二:机械原理第七版西北工业大学习题答案(特别全答案详解).doc第二章平面机构的构造分析题2-1 图a所示为一简易冲床的初拟设计方案。
设计者的思路是:动力由齿轮1输入,使轴A连续回转;而固装在轴A上的凸轮2与杠杆3组成的凸轮机构使冲头4上下运动,以到达冲压的目的。
试绘出其机构运动简图(各尺寸由图上量取),分析是否能实现设计意图,并提出修改方案。
解:1)取比例尺,绘制机构运动简图。
(图2-1a) 2)要分析是否能实现设计意图,首先要计算机构管此机构有4个活动件,但齿轮1和凸轮2是固装能作为一个活动件,故n?3 pl?3 ph?1F?3n?2pl?ph?3?3?2?4?1?0的自由度。
尽在轴A上,只原动件数不等于自由度数,此简易冲床不能运动,即不能实现设计意图。
分析:因构件3、4与机架5和运动副B、C、D组成不能运动的刚性桁架。
故需增加构件的自由度。
3)提出修改方案:可以在机构的适当位置增加一个活动构件和一个低副,或用一个高副来代替一个低副。
(1) 在构件3、4之间加一连杆及一个转动副(图2-1b)。
(2) 在构件3、4之间加一滑块及一个移动副(图2-1c)。
(3) 在构件3、4之间加一滚子(局部自由度)及一个平面高副(图2-1d)。
置上添加一个构件(相当于增加3个自由度)和1个低副(相当于引入2个约束),如图2-1(b)(c)所示,这样就相当于给机构增加了一个自由度。
(完整版)机械原理课后全部习题答案

机械原理课后全部习题答案目录第1章绪论 (1)第2章平面机构的结构分析 (3)第3章平面连杆机构 (8)第4章凸轮机构及其设计 (15)第5章齿轮机构 (19)第6章轮系及其设计 (26)第8章机械运动力学方程 (32)第9章平面机构的平衡 (39)第一章绪论一、补充题1、复习思考题1)、机器应具有什么特征?机器通常由哪三部分组成?各部分的功能是什么?2)、机器与机构有什么异同点?3)、什么叫构件?什么叫零件?什么叫通用零件和专用零件?试各举二个实例。
4)、设计机器时应满足哪些基本要求?试选取一台机器,分析设计时应满足的基本要求。
2、填空题1)、机器或机构,都是由组合而成的。
2)、机器或机构的之间,具有确定的相对运动。
3)、机器可以用来人的劳动,完成有用的。
4)、组成机构、并且相互间能作的物体,叫做构件。
5)、从运动的角度看,机构的主要功用在于运动或运动的形式。
6)、构件是机器的单元。
零件是机器的单元。
7)、机器的工作部分须完成机器的动作,且处于整个传动的。
8)、机器的传动部分是把原动部分的运动和功率传递给工作部分的。
9)、构件之间具有的相对运动,并能完成的机械功或实现能量转换的的组合,叫机器。
3、判断题1)、构件都是可动的。
()2)、机器的传动部分都是机构。
()3)、互相之间能作相对运动的物件是构件。
()4)、只从运动方面讲,机构是具有确定相对运动构件的组合。
()5)、机构的作用,只是传递或转换运动的形式。
()6)、机器是构件之间具有确定的相对运动,并能完成有用的机械功或实现能量转换的构件的组合。
()7)、机构中的主动件和被动件,都是构件。
()2 填空题答案1)、构件2)、构件3)、代替机械功4)、相对运动5)、传递转换6)、运动制造7)、预定终端8)、中间环节9)、确定有用构件3判断题答案1)、√2)、√3)、√4)、√5)、×6)、√7)、√第二章 机构的结构分析2-7 是试指出图2-26中直接接触的构件所构成的运动副的名称。
机械原理作业答案(含相对运动图解法)

F
E D
A
C B 图7
以 EF 为原动件时,其基本杆组及驱动杆组如图 8 所示,为 II 级机构。
E
C
B
D
F
A 图8
16c 以 AB 为原动件和以 EF 为原动件时,均为 II 级机构,其基本杆组及驱动杆组分别如图 9、图
10 所示。
B
E
C
C
F
A
D
图9
B
D
C
C A
F E
图 10
16d 除去机构中局部自由度,高副低代后的机构示意图和其基本杆组及驱动杆组如图 11 所示,II 级 机构。
当 AB 为最长杆时,有 lAB+lAD>lBC+lCD,即 lAB+30>50+35,得到 lAB>55 mm;由于 AB 杆的最大长度不
能大于其余三杆长度之和,即 lAB< lBC+lCD+lAD=50+35=30=115 mm,得到 55 mm< lAB<115 mm。
综合以上分析,得到 AB 杆的取值为:15 mm<lAB<45 mm 或 55 mm< lAB<115 mm
图9
2.20 习题
2.21 习题
221 解 设计步骤为(参见图 11): 1)=180(K1)/(K+1)=180(1.51)/(1.5+1)=36 2)选择长度比例尺l,根据已知条件,作出机架 AD 和摇杆的一个极限位置 DC1,并以 D 为圆心, CD1 为半径画圆弧。连接 AC1;代表摇杆的一个极限位置; 3)根据极位夹角定义,作与 AC1 夹角为 的射线 AC,其与圆弧分别交于 C2 和 C2,则 DC2 和 DC2 均可作为摇杆 CD 的两个极限位置。 4)若将 AC2 视为连杆与曲柄拉伸共线位置,AC1 视为连杆与曲柄重叠共线位置,则 lAB=0.5l(AC2AC1)49.3 mm,lBC=0.5l(AC2+AC1)120 mm 若将 AC1 视为连杆与曲柄拉伸共线位置,AC2 视为连杆与曲柄重叠共线位置,则
机械原理习题册答案
参考答案 第一章 绪论一,填空题1.1 能量,物料,信息1.2运动,动力 1.3制造,运动,装配 二、选择题2.1 D 2.2 B 三,简答题第二章 机械的结构分析二、综合题1.n = 7 ,p l = 9 ,p h = 121927323=-⨯-⨯=--=h l P P n F从图中可以看出该机构有2个原动件,而由于原动件数与机构的自由度数相等,故该机构具有确定的运动。
2. (a )D 、E 处分别为复合铰链(2个铰链的复合);B 处滚子的运动为局部自由度;构件F 、G 及其联接用的转动副会带来虚约束。
n = 8 ,p l = 11 ,p h = 1111128323=-⨯-⨯=--=h l P P n F3. (c )n = 6 ,p l = 7 ,p h = 313726323=-⨯-⨯=--=h l P P n F(e )n = 7 ,p l = 10 ,p h = 0101027323=-⨯-⨯=--=h l P P n F 4. (a )n = 5 ,p l = 7 ,p h = 010725323=-⨯-⨯=--=h l P P n FⅡ级组 Ⅱ级组 因为该机构是由最高级别为Ⅱ级组的基本杆组构成的,所以为Ⅱ级机构。
(c )n = 5 ,p l = 7 ,p h = 010725323=-⨯-⨯=--=h l P P n FⅢ级组因为该机构是由最高级别为Ⅲ级组的基本杆组构成的,所以为Ⅲ级机构。
5. n = 7 ,p l =10 ,p h = 0101027323=-⨯-⨯=--=h l P P n FⅡ级组 Ⅲ级组当以构件AB 为原动件时,该机构为Ⅲ级机构。
Ⅱ级组 Ⅱ级组 Ⅱ级组当以构件FG 为原动件时,该机构为Ⅱ级机构。
可见同一机构,若所取的原动件不同,则有可能成为不同级别的机构。
6. (a )n = 3 ,p l = 4 ,p h = 101423323=-⨯-⨯=--=h l P P n F因为机构的自由度为0,说明它根本不能运动。
机械原理作业答案1-8-A4
F A A vB E B
C
E
B
D
C
vB D F
G
(b )
( a)
e c
d
解: 方向 大小
pd
b
p
b
c
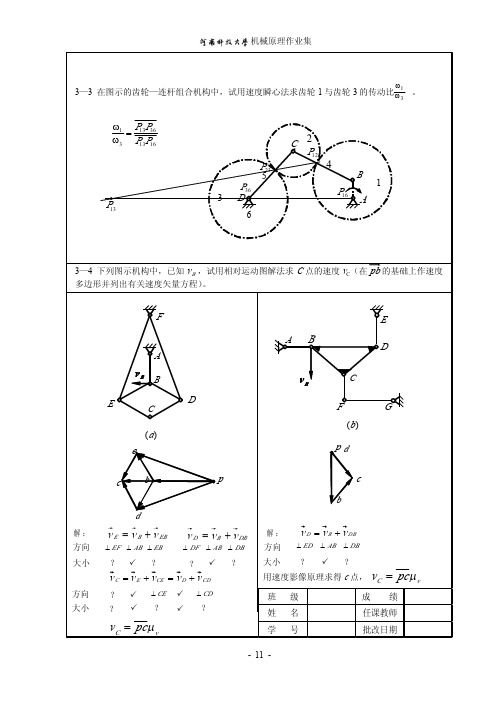
v E = v B + v EB
⊥ EF ⊥ AB ⊥ EB
v D = v B + v DB
⊥ DF ⊥ AB ⊥ DB
解: 方向 大小
v D = v B + v DB
⊥ ED ⊥ AB ⊥ DB
?
�
方向 大小 ? ? � �
n τ
D→B
� 0
a D = p ′d ′µ a
=
k′
p′
班 姓 学
μa
级 名 号
成
绩
任课教师 批改日期
′ b1
- 17 -
机械原理作业集
3—12 已知图示机构的位置及尺寸,ω1=常数,试用相对运动图解法求图示位置: (1) 构件 5 上 F 点的速度 v F(在 pb 的基础上作速度多边形并列出有关矢量方程式及计算式) ; (2) 构件 5 上 F 点的加速度 aF(写出求解思路并列出有关矢量方程式及计算式) ;
3—10 已知图示机构的位置及尺寸, ω1 =常数,用相对运动图解法求构件 3 的角速度ω3 和加角速度 α3 。 (画出机构的速度、加速度多边形,并列出必要的矢量方程式及计算式。 )
4
4 ω1
1
B (B2、B3 ) 2
D
(矢量方程及必要的分析计算) :
解:1.速度分析
v B3 = v B 2 + v B 3 B2
机械原理作业集
3—3 在图示的齿轮—连杆组合机构中,试用速度瞬心法求齿轮 1 与齿轮 3 的传动比 ω 1 。
机械原理课后答案十作业

此种情况下传动的啮合角α′、中心距a′、两轮节圆半径r1′及r2′、 顶隙c′及周向侧隙cn′。
解:1)求B1B2及εα db1 = m z1 cosα= 5×19 cos20°=89.27 db2 = m z2 cosα= 5×42 cos20°=197.34
da1= m(z1+2ha*) = 5×(19+2×1) = 105
基 圆直径:db1= d1 cosαt =155.85(.mm)
db2= 311.69(mm12)
齿顶、根高:ha= han*mn = 8 (mm)
hf = (han*+ cn*) mn = 10(mm)
法、端面齿厚:sn=πmn/2=12.57(mm) st=πmn/(2cosβ) =13.09(mm)
da2= m(z2+2ha*) = 5×(42+2×1) = 220 αa1 =arccos(db1/da1 ) = arccos(89.27/ 105) =31.77° αa2 =arccos(db2/da2 ) = arccos(197.34/ 220) =26.23° εα= [z1(tanαa1-tanα′)+z2 (tanαa2 - tanα′)] /(2π) α′= α
2)计算几何尺寸及当量齿数
分度圆直径:d1 = mn z1 / cosβ= 166.67(mm)