永磁同步电动机控制策略综述_林辉
浅析永磁同步电机控制策略

浅析永磁同步电机控制策略【摘要】近年来,永磁同步电机凭借其体积小、损耗低、效率高等优点,被广泛应用于各种生产实践中。
与此同时,对永磁同步电机的控制研究也得到了广泛的重视。
本文就永磁同步电机的控制策略做出简单阐述,对比其优缺点,分析永磁同步电机控制侧率的发展方向。
【关键词】永磁同步电机;恒压频比开环控制;矢量控制;直接转矩控制1.引言近年来,随着电力电子技术、新型电机控制理论和稀土永磁材料的快速发展,永磁同步电动机得以迅速的推广应用。
永磁同步电动机具有体积小,损耗低,效率高等优点,在节约能源和环境保护日益受到重视的今天,对其研究就显得非常必要。
因此。
这里对永磁同步电机的控制策略进行综述,并介绍了永磁同步电动机控制系统的各种控制策略发展方向。
2.永磁同步电机的数学模型永磁同步电机(PMSM)的永磁体和绕组,绕组和绕组之间的相互影响,电磁之间的关系十分复杂,由于磁路饱和等非线性因素,建立精确的数学模型是很困难的。
为了简化PMSM的数学模型,我们通常作如下的假设:(1)磁路不饱和,电机电感不受电流变化影响,不计涡流和磁滞损耗;(2)忽略齿槽、换相过程和电枢反应的影响;(3)三相绕组对称,永久磁钢的磁场沿气隙周围正弦分布;(4)电枢绕组在定子内表面均匀连续分布;(5)驱动二极管和续流二极管为理想元件;(6)转子磁链在气隙中呈正弦分布。
对于永磁同步电机来说,即用固定转子的参考坐标来描述和分析其稳态和动态性能是十分方便的。
此时,取永磁体基波励磁磁场轴线即永磁体磁极的轴线为d轴,而q轴逆时针方向朝前90o电角度。
d轴与参考轴A之间夹角为。
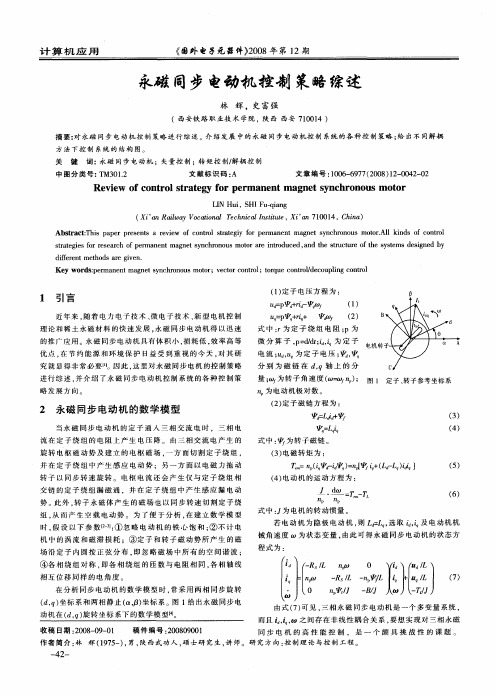
图1为永磁同步电机(PMSM)矢量图。
图1 PMSM空间向量图Fig.1 Space vector diagram of PMSM根据图1所示向量图进行坐标变换,满足功率不变原则,得到在旋转坐标系下PMSM的数学模型方程如下(1)电压方程由三相静止轴系ABC到同步旋转轴系dq的变换得:(1),Rs为定子相电阻,其中:。
永磁同步电动机控制策略及应用研究综述_张宏宇

中图分类号:TM 341 TM 351 文献标志码:A 文章编号:1001-6848(2008)04-0069-05永磁同步电动机控制策略及应用研究综述张宏宇,闫 镔,陆利忠(信息工程大学,郑州 450002)摘 要:分别阐述了经典控制策略、现代控制策略、智能控制策略和复合控制策略的原理及其在永磁同步电机伺服系统中的应用,分析了各种控制策略的优缺点,展望了发展趋势。
关键词:永磁同步电动机;控制策略;智能控制;发展趋势Control Strategy and Application R evie w of Per m anentM agnet SynchronousM otorZ HANG H ong -yu,YAN B in ,LU L-i zhong(Infor m ati o n Eng i n eer i n g Un i v ersity ,Zhengzhou 450002,China)Abst ract :In th is paper ,the contro l strategy of the per m anent m agnet synchronous m oto r (P M S M )w ere i n tr oduced firstly ,Then the t h eory and app lication of the contro l field of the P M SM servo syste m,respecti v e l y throught the classic contro,l t h e m odern contr o ,l the intelligent con tro l and the co m positi v econtro lw ere explained ,analysed the ir m erits and dra wbacks and gave out the f u ture trends in the con tro lsche m es o f P M S M.K eywords :Per m anent m agnetsynchronous m otor ;Controlstra tegy ;I nte lli g entcontro;lDevelopm en t trend收稿日期:2007-07-24基金项目:河南省自然科学基金项目(061102400)0 引 言永磁同步电动机通常指反电动势为正弦波的永磁无刷同步电机[36]。
永磁同步电动机控制策略综述
Re i w f c n r lsr t g o r a ntm a ne y hr n u o o v e o o t o t a e y f r pe m ne g ts nc o o s m t r
L N Hu ,S u q a g I i HIF — i n
d f r n t o s a eg v n i e e tmeh d r i e . f Ke r sp r a e tma n ts n h o o smo o ;v co o t l oq e c n r l e o p ig c n r l y wo d :e m n n g e y c r n u tr e t rc n r ;tr u o t / c u l o to o od n
1 引 言
近年来 。 随着 电力 电 子 技 术 、 电 子技 术 、 型 电 机 控 制 微 新
理 论 和 稀 土 永 磁 材 料 的快 速 发 展 , 磁 同步 电 动 机得 以 迅 速 永
( ) 子 电压 方 程 t p r+ q q ss  ̄
方 法 下控 制 系统 的 结构 图 。
关
键
词: 永磁 同 步 电动 机 ;矢 量控 制 ; 矩 控 制/ 耦 控 制 转 解
文 献 标 识 码 : A 文 章 编 号 :0 6 6 7 ( 0 8 1 — 0 2 0 10 — 9 7 2 0 ) 2 0 4 — 2
中 图分 类 号 : M3 1 T 0. 2
相 互 位 移 同样 的 电 角 度 。 在分 析 同 步 电 动 机 的数 学 模 型 时 . 采 用 两 相 同 步 旋 转 常 ( ,) 标 系 和 两 相 静 止 ( ) 标 系 。图 l给 出永 磁 同步 电 dq坐 , 坐
基于反馈线性化的永磁同步电机模型预测控制_林辉
{ y = h( x)
· x = f( x) + g( x) u
( 4)
[11 - 12 ] , 根据微分几何理论 给定 x0 ∈ X, 如果存在 x0 的一个邻域 V 及整数向量 ( r1 , …, r m ) 使满足条件 k 0 ≤i ≤m, 0 ≤j≤m 及 0 ① L gj L f h i ( x) = 0 , x ∈V, ≤k ≤r i - 2 ;
id 、 iq 和 ud 、 u q 分别为 d、 q 轴定子电流、 式中, 电压; R s 为定子电阻; L 为定子电感; Ψ r 为永磁磁通; B 为黏滞 摩擦系数; J 为转动惯量; p 为极对数; ω r 为转子速度; T l 为负载转矩。 定义系统状态变量和输入变量分别 为
T T x =[ id , iq , ud , u q] ω r] ; u = [
· 54· 一种方法。其主要思想是利用微分几何工具, 通过非 将非线性系统转换为线性系统 线性反馈和同胚映射, ( 全部或部分) 。与传统线性化方法不同的是, 反馈线 性化不是在系统工作点邻域内进行近似线性化 , 而是 得到精确线性化, 其在整个 通过状态反馈和坐标变换, [9 - 10 ] 。 状态空间都是有效的 本文的主要工作是, 对非线性模型进行反馈线性 得到一可控线性模型; 应用 MPC 设计控制器, 对电 化, 流和转速进行控制, 同时结合极点配置法对有 / 无约束 情况下的性能进行比较研究。
2
= h2 ( x ) = ω r
( 3)
{
· z1 = · y1 = v1 · z 2 = z3 · ¨ 2 = v2 z3 = y
( 8)
将系统( 1 ) 重新写成标准仿射非线性系统的形式
将上式重新写成状态空间方程 0 0 0 1 0 · z = Az + Bv = z + 0 0 1 0 0 v ( 9) 0 0 0 0 1 y = Cz = 1 0 0 z 0 1 1 在获得线性模型 ( 9 ) 后, 可以借助成熟的线性控 制策略, 系统地设计控制律。 在得到虚拟的控制律 v 后, 再通过状态反馈方程式 ( 7 ) 转换为实际控制律 u, 应用于实际非线性系统。
《永磁同步电机传动系统的先进控制策略及应用研究》范文
《永磁同步电机传动系统的先进控制策略及应用研究》篇一一、引言随着现代工业的快速发展,对电机传动系统的性能要求越来越高。
永磁同步电机(PMSM)以其高效率、高功率密度和良好的调速性能,在工业、交通、能源等领域得到了广泛应用。
然而,为了进一步提高PMSM传动系统的性能,研究先进的控制策略显得尤为重要。
本文将重点探讨永磁同步电机传动系统的先进控制策略及其应用研究。
二、永磁同步电机基本原理永磁同步电机是一种利用永磁体产生磁场的电机,其转子与定子之间的磁场同步,从而实现电机的稳定运行。
PMSM具有高效率、高功率密度和良好的调速性能,是现代传动系统中的关键设备。
三、先进控制策略研究1. 矢量控制策略:矢量控制是一种基于磁场定向的控制策略,通过精确控制电流的幅值和相位,实现电机转矩和磁场的解耦控制,从而提高电机的运行性能。
2. 模糊控制策略:模糊控制是一种基于模糊逻辑的控制策略,通过模拟人的思维过程,实现电机控制的智能化。
在PMSM传动系统中,模糊控制可以有效地提高系统的鲁棒性和自适应性。
3. 预测控制策略:预测控制是一种基于预测模型的控制策略,通过对系统未来的状态进行预测,实现电机的优化控制。
在PMSM传动系统中,预测控制可以有效地提高系统的动态性能和稳定性。
四、应用研究1. 工业领域应用:在工业领域,PMSM传动系统广泛应用于机床、机器人、自动化生产线等设备中。
通过采用先进的控制策略,可以提高设备的运行性能和效率,降低能耗和成本。
2. 交通领域应用:在交通领域,PMSM传动系统被广泛应用于电动汽车、轨道交通等交通工具中。
通过采用矢量控制、模糊控制等策略,可以提高车辆的能效比和驾驶性能,同时降低噪音和振动。
3. 能源领域应用:在能源领域,PMSM传动系统被广泛应用于风力发电、太阳能发电等新能源设备中。
通过采用预测控制等策略,可以提高设备的发电效率和稳定性,同时降低维护成本。
五、结论永磁同步电机传动系统的先进控制策略对于提高系统性能具有重要意义。
永磁同步电动机控制策略综述

永磁同步电动机控制策略综述1. 引言近年来,随着电力电子技术、微电子技术、新型电机控制理论和稀土永磁材料的快速发展,永磁同步电动机得以迅速的推广应用。
永磁同步电动机具有体积小,损耗低,效率高等优点,在节约能源和环境保护日益受到重视的今天,对其研究就显得非常必要。
因此。
这里对永磁同步电机的控制策略进行综述,并介绍了永磁同步电动机控制系统的各种控制策略发展方向。
2. 永磁同步电动机的数学模型当永磁同步电动机的定子通入三相交流电时,三相电流在定子绕组的电阻上产生电压降。
由三相交流电产生的旋转电枢磁动势及建立的电枢磁场,一方面切割定子绕组,并在定子绕组中产生感应电动势;另一方面以电磁力拖动转子以同步转速旋转。
电枢电流还会产生仅与定子绕组相交链的定子绕组漏磁通,并在定子绕组中产生感应漏电动势。
此外,转子永磁体产生的磁场也以同步转速切割定子绕组。
从而产生空载电动势。
为了便于分析,在建立数学模型时,假设以下参数:①忽略电动机的铁心饱和;②不计电机中的涡流和磁滞损耗;③定子和转子磁动势所产生的磁场沿定子内圆按正弦分布,即忽略磁场中所有的空间谐波;④各相绕组对称,即各相绕组的匝数与电阻相同,各相轴线相互位移同样的电角度。
在分析同步电动机的数学模型时,常采用两相同步旋转(d,q)坐标系和两相静止(α,β)坐标系。
图1给出永磁同步电动机在(d,q)旋转坐标系下的数学模型。
(1)定子电压方程为:式中:r为定子绕组电阻;p为微分算子,p=d/dt;id,iq为定子电流;ud,uq为定子电压;ψd,ψq分别为磁链在d,q轴上的分量;ωf为转子角速度(ω=ωfnp);np为电动机极对数。
(2)定子磁链方程为:式中:ψf为转子磁链。
(3)电磁转矩为:式中:J为电机的转动惯量。
若电动机为隐极电动机,则Ld=Lq,选取id,iq及电动机机械角速度ω为状态变量,由此可得永磁同步电动机的状态方程式为:由式(7)可见,三相永磁同步电动机是一个多变量系统,而且id,iq,ω之间存在非线性耦合关系,要想实现对三相永磁同步电机的高性能控制,是一个颇具挑战性的课题。
永磁同步电机控制策略简介

收稿 日期 :0 8— 4一l 20 0 5
作者简 介 : 林辉 (9 5一) 男 , 17 , 陕西武功人 , 电气工程系讲师。
林
辉: 永磁 同步电机控制策略简介
3 9
数 学模 型 , 磁 同步 电机 的 动 态 数 学 模 型是 非 线 永 性 、 变量 , 多 它含有 角速 度 与 电流 i或 的乘 积 。 项, 因此要得 到精 确控 制 性 能必 须 对 角 速 度 和 电流 进行 解 耦 。 年 来 , 究 和 开 发 了各 种 非 线 性 控 制 近 研 器, 来解 决永磁 同步 电机 非线性 的特性 。
L n Hu i i
f nR i a oao a & T cnc ntue aw yV ct nl ehia Istt) X l i l i
Ab ta t h s p p rp e e t a r v e fc n r l t tge o e ma e t g e y c r n u tr s r c :T i a e r s n s e iw o o t r e isfrp r n n o sa ma n ts n h o o s moo .Al k n s o l id f
矢 量 切换开 关表 等环 节 组成 , 中 u , , , 为 静 其 。 Qi i 。 p
止 DQ坐 标 系下 电压 、 电流分 量 。
永磁直线同步电机无传感器控制策略综述

永磁直线同步电机无传感器控制策略综述介绍了几种无传感器控制技术在永磁直线同步电机控制策略中的应用,针对不同期望特性的控制系统,应选取合适的控制策略,才能满足伺服系统的要求。
1 永磁直线同步电机的工作原理与数学模型1.1 电机的工作原理与旋转电机类似,永磁直线同步电机的工作原理也是利用电磁作用将电能转化为动能。
在电机的初级端的三相绕组施加三相对称正弦电流,气隙中会产生气隙磁场,且该磁场并不是旋转的,而是沿着直线方向呈正弦分布,称为行波磁场。
行波磁场与次级端的永磁体相互作用,就会产生电磁推力。
在电磁推力的作用下,初级沿着行波磁场的运动的反方向做直线运动。
1.2 电机的数学模型为简化分析电机的数学模型,理想状态下电机在坐标系下的动态方程为:式中Ld、Lq分别为交直轴电感;id、iq分别为交直轴的电流分量;?鬃d、?鬃q分别为交直轴轴磁链;?棕r为动子等效角速度,?鬃f为动子永磁体磁链,R为定子电阻。
2 无传感器控制策略在直线电机伺服系统中的应用2.1 滑模变结构控制策略滑模变结构控制的基本原理是根据控制系统期望的控制效果设计一个切换超平面,在不连续的控制律作用下,使系统结构不断地变换,并不断地观测定子的电流的大小,保证观测的电流值与实际的定子电流值误差较小,使系统在一定条件下沿期望的状态轨迹作高频小幅度上下运动。
通过这种高频率的来回调节,强迫系统的状态沿着超平面向平衡点滑动,使系统最后渐进稳定在平衡点的允许范围内,即滑动模态运动,如图1所示。
滑模变结构控制策略结构简单、响应速度快,又由于可以设计其滑动模态,抗干扰能力较强,系统鲁棒性好,但存在着系统不能自起动,严重依赖电机参数等问题。
2.2 模型参考自适应控制策略模型参考自适应控制策略的基本原理是将全含已知参数的系统方程作为参考模型,将含有未知参数的系统方程作为可调模型,且这两个模型的输出量物理意义相同。
系统运行时,参考模型和可调模型同时启动,并利用二者输出量的差值,根据系统自适应机构设置的自适应控制算法来调节可调模型的控制参数,从而实现控制系统的输出量在线实时跟踪系统的参考模型,控制策略的原理图如图2所示。
多约束永磁同步电机稳定模型预测控制策略
(. 1 西北工业大学 自动化学 院,陕西 西安 7 0 7 ; . 10 2 2 西安科技 大学 网络中心 , 陕西 西安 7 0 5 ) 10 4
摘
要 : 对 多 变量 约 束 条 件 的 永磁 同步 电机 ( MS 调 速 问题 , 出一 种 稳 定 模 型 预 测 控 制 针 P M) 提
ro iis a o e i lo C o liv ra l y t m nd mu t- a ib e c n ta ns s se a e pr s n- irt nd p tnt fMP f rmu t・ a ib e s se a liv ra l o sr i t y t m r e e ・ e a ・ ・ td.Th i l t n e ut e i h t t e sa iii g e e smu ai r s ls v rf t a h t b l n MPC a smpl t cur s l ac lto e o y z h s i e sr t e, mal lu ain d . u c ma d,e c le tsai n y a c p ro a c nd sr n o u t e s n x eln ttc a d d n mi e fr n e a to g r b sn s . m Ke r s: tbiii g mo e r d c ie c n rl i e rz t n;tr n lf n to y wo d sa lzn d lp e i t o to ;ln aia i v o emi a u c in;i a in e ;p r a nv ra t s t e m - n n g e y c r no s mo o s n iwi d p e tma n ts n h o u tr ;a t— n u
永磁同步电机的控制策略
沦 .自17年德 国西¨子公 司F l ck提 出矢 量控 制原理 起 ,它就 91 . a he Bs 受到人f 『 广泛关注 ,在理 论、应用方面进行 了深 入的研 究 . 伯 .
矢量控制的基本思 想是:在 普通 的三相交流 电机 上没法模拟 直流 电机转矩的控制规 律,在磁场 定向坐标 上 ,通过矢量变换将 三柏交流 电机的定子电流分解成励磁 电流分量 和转矩电流分量 ,并使两 个分量 相互垂直 ,彼此 独立,然后分 别进行 凋节 这样交流 电动机 的转矩控 , 制从原理 和特性 上就和直流 电动 机相 似了。 此矢量控制的关键是对 定子电流幅值和空 J 位置 ( 频率和相位 )的控制 . . 矢量控 制的 目的是改 善转矩控制性 能 ,最终的实施要落 实到对 定 子电流的控 制上 出于定 子侧 的物理 量都是交流量 ,其空问 矢量在空 、
直流 电机的主磁场和电枢磁场在 空 互差9 度 电角度 ,凶此 可以独立 J 1 } 凋节 ;I 交流电机的主磁场 和电枢磁 场互 垂直 ,互相影 响 凶此 , 町 长期以来 ,交流电机的转矩控 制性能 不佳 经过长期 的研究 ,目前交
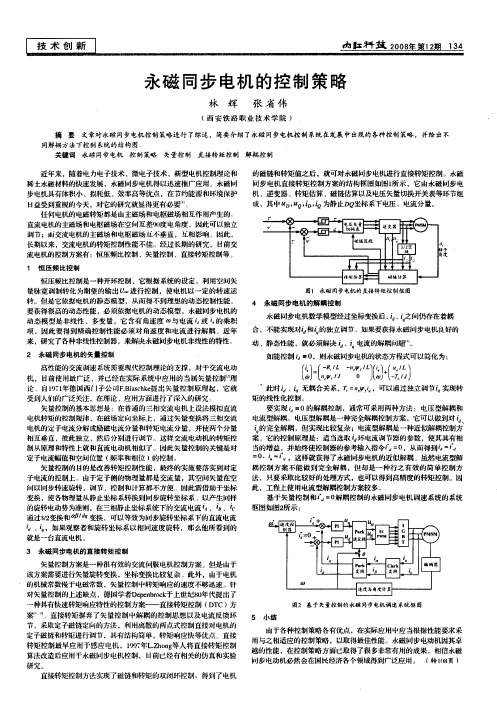
的嗣 链和转矩值之 后 ,就可对水磁蚓步电机进行直接转矩控制 永磁 } 耋 『 步 电机 直接转矩控 制方案 的结构框图如 I 示 ,它 由永磁I 步 电 司 所 司 机 、逆变器 、转矩估 算 、磁链估算以及电压 矢量切换 开关表等环节组
.
当的增益 ,并始终 使控制器的参考输 入指令i 0 从而 得Ni i = , , 0 ‘ ,这样就获得 了永磁 同步 电机的近似解耦 。虽然 电流 型解 ・ i 耦控 制方 案不能 做到 完全解 耦 ,但 却是一种行 之有效 的简 单控制 方 法 ,只要 采取 比较 好的处理方式 ,也可以得到高精度的转矩控制 。因 此 ,工程上使 片电流型解 耦控 制方案较 多 I
永磁同步电机控制策略简介

永磁同步电机控制策略简介
林辉
【期刊名称】《西安铁路职业技术学院学报》
【年(卷),期】2008(000)004
【摘要】对永磁同步电机控制策略进行了综述.简要介绍了永磁同步电机控制系统在发展中出现的各种控制策略,并给出不同解耦方法下控制系统的结构图.
【总页数】3页(P38-39,53)
【作者】林辉
【作者单位】西安铁路职业技术学院,陕西西安,710014
【正文语种】中文
【中图分类】TP271
【相关文献】
1.永磁同步电机控制策略简介 [J], 刘畅;马成禄
2.小电容功率变换器-永磁同步电机系统脉动电流控制策略 [J], 巨世强;谷鑫;金雪峰;王志强
3.永磁同步电机调速系统新型滑模变结构控制策略 [J], 王淑旺;范诚;徐群龙
4.电动汽车永磁同步电机控制策略 [J], 宋毓聪;郭淑清
5.五相永磁同步电机磁链矫正容错控制策略 [J], 李凤祥;贾军成;汤军
因版权原因,仅展示原文概要,查看原文内容请购买。
永磁同步电机控制策略及其应用
永磁同步电机控制策略及其应用永磁同步电机(Permanent Magnet Synchronous Motor,简称PMSM)是新一代高效、节能、环保的电机。
因其高效能、高功率密度、小体积、小惯量等特点,它近年来在各个领域得到了广泛的应用。
为了实现高效、稳定、快速响应的控制,PMSM需要不断的探索与优化其控制算法。
本文将探讨永磁同步电机控制策略以及其在工业生产和汽车制造等领域的应用。
一、永磁同步电机控制策略1. 矢量控制矢量控制是目前应用最广泛的永磁同步电机控制策略。
它是一种既能够控制电机的电磁转矩,又能够控制电机的磁通的控制方法。
矢量控制可以使永磁同步电机在不同负载和转速下保持稳定的工作。
2. 直接转矩控制直接转矩控制是一种以控制电机转矩为基础的控制方法。
直接转矩控制的优点是反应快、精度高,但是其要求系统的传感器精度和响应速度都很高,成本较高。
3. 基于通量观测的控制基于通量观测的控制是一种通用的控制方法。
它通过对电机的磁通进行观测,从而实现了对电机的控制。
它通过传感器、观测器和闭环控制器三个部分构成。
二、永磁同步电机在工业生产中的应用随着工业化的迅速发展,各种机器设备都在不断地改进升级,工业生产中的永磁同步电机也得到了广泛的应用。
以下是几个典型的应用场景。
1. 机床加工永磁同步电机在机床加工中的应用已经成为一个趋势。
它可以实现高精度加工、高速切削、扭矩大输出平稳等特点,能够满足机床高质量高效率的加工需求。
2. 电动汽车永磁同步电机电动汽车是未来汽车行业的重要发展方向。
它可以实现高效、低能耗、低碳排放等优点。
相较于传统的内燃机汽车,永磁同步电机电动汽车具有更高的能量利用率。
3. 风力发电永磁同步电机风力发电技术已经成为风能转化的主流技术之一。
在风力发电场中,永磁同步电机可以实现对风轮的控制,将风能转化为电能。
它可以实现高效稳定的风力发电,具有很高的经济效益。
三、永磁同步电机在汽车制造等领域的应用1. 汽车底盘系统永磁同步电机在汽车底盘系统中的应用也越来越广泛。
永磁同步电机位置伺服系统迭代学习控制
<=引=言
永磁 同 步 电 机 bBQPHCBCL'HDCBL-ICRAQ/C/GN '/L/Q b'-' 因其高效率 高功率密度和高转矩惯 量比等优点 广泛应用于航空航天 机器人 交通 等高精度位置伺服系统领域# 近年来 随着对系 统性能的要求愈来愈高 如何提高 b'-' 位置伺服 系统的精度成为了研究热点 传统位置伺服控制方 法通常采用 b(h控制器$ Z" 但是 b(h控制器本身 是有差控制且控制器参数调节难度较大 在解决高 精度跟踪方面难以达到满意的效果 因此 国内外 众多学者尝试运用先进的控制理论和方法来提高
E2+'.'2&-"/*2 -1+."F 23E"/F%&"&.!%,&".-1&#$/2&28+!2.2/+ M'.$N."/%.'*"R"%/&'&, O2&./2(
'>h/CDUJ f(3;GJ 73%//9/012-/>&-$/' H/+-%O#,-#+' P/9.-#3%'$3&9)'$*#+,$-. M$u&' 7#%#$6 6%$'&
05+./%#. ,//4BQR/PBLABAJDABQ/QMBQC/C0JCBHQJLI NLQ/CD?R/GV0JCDHCM GCWC/XC BTLBQCH0MJNLGQSHCRBO/Q VBQPHCBCLPHDCBLNICRAQ/C/GNP/L/QV/NJLJ/C NBQ4/NINLBP HC/4B0JLBQHLJ4B0BHQCJCDR/CLQ/0PBLA/M XHNVQ/? V/NBM HRR/QMJCDL/LABVHQLJRG0HQJLI/OLABP/MB0/OLABVBQPHCBCLPHDCBLNICRAQ/C/GNP/L/QV/NJLJ/C NBQ4/NIN? LBP2>h?LIVBJLBQHLJ4B0BHQCJCD0HXXHNMBNJDCBM SIGNJCDLABNBR/CM MBQJ4HLJ4B/OLABBQQ/Q2,ABR/C4BQDBCRB R/CMJLJ/C /OLABH0D/QJLAPXHNMBQJ4BM SIGNJCDPHLABPHLJRH0WC/X0BMDB2,ABNJPG0HLJ/C HCM BTVBQJPBCLH0QBNG0LN NA/XLAHLLABJLBQHLJ4B0BHQCJCDR/CLQ/0NLQHLBDIAHNHAJDABQHRRGQHRIR/PVHQBM XJLA LABLQHMJLJ/CH0PBLA/M2 9"1 :2/;+ JLBQHLJ4B0BHQCJCDR/CLQ/0 AJDA VQBRJNJ/C VBQPHCBCLPHDCBLNICRAQ/C/GNP/L/Q V/NJLJ/C NBQ4/ NINLBP
永磁同步电动机伺服系统控制策略
永磁同步电动机伺服系统控制策略2010-9-14 20:27:00 来源:作者:伴随着现代工业的快速发展,标志着一个国家工业实力的相应设备如精密机床、工业机器人等对其“驱动源”——电伺服驱动系统提出了越来越高的要求。
而基于正弦波反电势的永磁同步电动机(简称PMSM)因其卓越的性能已日渐成为电伺服系统执行电动机的“主流”[1]。
随着现代电力电子技术、微电子技术及计算机技术等支撑技术的快速发展,以永磁同步电动机作为执行机构的交流伺服驱动系统的发展得以极大的迈进。
然而伺服控制技术是决定交流伺服系统性能好坏的关键技术之一,是国外交流伺服技术封锁的主要部分。
随着国内交流伺服用电机及驱动器等硬件技术逐步成熟,以软形式存在于控制芯片中的伺服控制技术成为制约我国高性能交流伺服技术及产品发展的瓶颈。
研究具有自主知识产权的高性能交流伺服控制技术,尤其是最具应用前景的永磁同步电动机伺服控制技术,具有重要的理论意义和实用价值。
永磁同步电动机伺服系统基本结构永磁同步电机伺服系统主要由伺服控制单元、功率驱动单元、通讯接口单元、伺服电动机及相应反馈检测器件组成,其结构组成如附图所示。
其中伺服控制单元包括位置控制器、速度控制器、转矩和电流控制器等。
全数字化的永磁同步电机伺服控制系统集先进控制技术和控制策略为一体,使其非常适用于高精度、高性能要求的伺服驱动领域,同时智能化、柔性化也已经成为了现代电伺服驱动系统的一个发展趋势[2][3]。
PWM调制技术及死区补偿技术发展现状PWM调制多采用异步调制方式,分滞环调制、正弦波调制、空间矢量调制(SVPWM)等。
TI公司的ZhenyuYu 等人分析了各种PWM调制方式基于DSP的数字实现技术[4]。
滞环调制实现简单,但波形谐波大,性能较差。
正弦PWM调制的信号波为正弦波,其脉冲宽度是由正弦波和三角载波相交而成,为自然采样,数字实现中变化出多种规则采样方法。
有的文献中根据电机特点,在正弦波中叠加高次谐波,以抑制某些次谐波,达到优化电流波形的目的。
永磁同步电机控制策略研究

永磁同步电机控制策略研究永磁同步电机是一种新兴的电机类型,具有高效率、高功率密度和良好的动态性能等优点,被广泛应用于工业和交通领域。
为了充分发挥永磁同步电机的性能,研究和优化其控制策略是非常重要的课题。
本文将从几个方面介绍永磁同步电机控制策略的研究。
首先,我们来了解永磁同步电机的基本原理。
永磁同步电机的转子上有一组永磁体,可以产生一个恒定的磁场。
当定子绕组通过电流时,会在定子上产生一个旋转磁场。
磁场的旋转速度与电机的转速相同,因此电机转动时,磁场与转子磁场之间会存在磁矢量差异,从而产生电磁转矩。
因此,永磁同步电机的控制策略主要是控制定子电流,以实现所需的转矩和转速。
其次,我们来介绍永磁同步电机的传统控制策略。
传统的控制策略包括矢量控制、直接转矩控制和间接转矩控制。
矢量控制是较为常用的一种策略,它通过测量永磁同步电机的电流和位置信息,并使用数学模型来估算电机的转子位置和电流矢量。
通过对定子电流和转子位置矢量进行控制,可以实现精确的转矩和转速控制。
直接转矩控制和间接转矩控制则是通过估算电机的转矩值,并控制定子电流来实现转矩和转速控制。
这些传统控制策略都能够有效地控制永磁同步电机,但仍存在一些问题,如系统复杂度高、动态响应不理想等。
接下来,我们来介绍一种新型的永磁同步电机控制策略,即模型预测控制。
模型预测控制是一种优化控制策略,它通过建立电机的数学模型,并预测未来一段时间内的电机状态和输出,进而优化控制信号,以实现更好的控制效果。
对于永磁同步电机而言,模型预测控制可以提供更精确的转矩和转速控制,并能够在动态响应和响应时间上有所改善。
此外,模型预测控制还可以考虑系统的约束条件,如电流限制、电压限制等,以确保系统的安全性和稳定性。
最后,我们来探讨永磁同步电机控制策略的研究方向和挑战。
目前,永磁同步电机的控制策略研究正朝着更加高效、智能和可靠的方向发展。
一方面,研究人员正着重优化传统的控制策略,提高永磁同步电机的性能和控制精度。
永磁同步电机控制策略综述和展望

永磁同步电机控制策略综述和展望摘要:随着近年来科技的飞速发展,各领域对电机的控制性能要求也越来越高,其中永磁同步电机因其构造简单、质量体积较小、效率高和较好的鲁棒性能而快速发展,同时由于近年来稀土材料大量运用于永磁体的研究,永磁同步电机的永磁体效能也明显提高。
永磁体在经过充磁后可以形成恒定的磁场,具有良好的励磁特性,并且永磁体比电励磁质量更轻、稳定性更强、损耗更低。
尤其是近年来电力电子技术的发展,更是让永磁同步电机的控制得到飞速发展。
永磁同步电机的控制已成为近年来电机领域的研究重点。
下面,文章就永磁同步电机控制策略综述和展望进行论述。
关键词:永磁同步电机;控制策略;未来展望引言永磁同步电机作为交流伺服系统的重要组成部分,由于其具有体积小、重量轻、效率高等一系列优点,在农业机械、航空航天等领域应用广泛。
随着新型高效永磁材料的不断发现,电励磁装置逐渐被永磁体励磁所取代,节约了成本,使永磁同步电机获得了快速的发展。
永磁同步电机作为一种强耦合、多变量的复杂系统,在控制过程中需要先进的控制算法进行简化处理,现阶段随着永磁同步电机的快速发展,已建立出一套适用性较高的数学模型,因此研究先进的控制算法显得尤为重要。
1永磁同步电机工作原理电动机的工作原理是基于定子绕组中的电流和转子磁场之间的相互作用。
如图1 所示,当电机转子产生的永磁体直流磁场为d轴静磁场时,空间中没有旋转磁场。
当三相定子绕组通直流电时,会产生相应的直流磁场。
在合理控制各相绕组电流强度的前提下,两个直流磁场就像磁铁一样,产生相互作用力。
由于定子绕组不能移动,转子磁场受到旋转力的影响。
图1 定子磁场与转子磁场作用示意图磁场相对位置的变化会导致两者间的作用力变化并且不会保持恒定,通常在定子绕组中放置正弦点,形成等效的旋转磁铁。
2永磁同步电机控制策略综述以及展望2.1矢量控制矢量控制也称为磁场定向控制。
由于在永磁同步电机输入交流电时会在电机内部产生电磁转矩和耦合磁场,这会影响电机的运行并给永磁同步电机的控制带来新的问题。
《永磁同步电机传动系统的先进控制策略及应用研究》
《永磁同步电机传动系统的先进控制策略及应用研究》篇一一、引言随着工业自动化和智能化水平的不断提高,永磁同步电机(PMSM)传动系统在各个领域的应用越来越广泛。
为了满足日益增长的高效、高精度和稳定性的需求,对永磁同步电机传动系统的控制策略提出了更高的要求。
本文将探讨永磁同步电机传动系统的先进控制策略及其应用研究,旨在为相关领域的研究和应用提供参考。
二、永磁同步电机传动系统概述永磁同步电机是一种以永磁体提供励磁的同步电机,具有结构简单、高效节能、运行稳定等优点。
其传动系统主要由永磁同步电机、控制器、传感器和传动装置等组成。
在工业生产中,永磁同步电机传动系统广泛应用于机床、机器人、新能源汽车等领域。
三、传统控制策略及其局限性传统的永磁同步电机控制策略主要包括矢量控制和直接转矩控制等。
这些控制策略在一定的应用场景下取得了良好的效果,但在高精度、高动态性能要求的应用中,仍存在一些局限性。
例如,矢量控制虽然可以实现电机的精确控制,但在参数变化和扰动情况下,系统的稳定性会受到影响;直接转矩控制虽然具有较快的动态响应,但在低速运行时易产生转矩脉动。
四、先进控制策略针对传统控制策略的局限性,本文介绍几种先进的永磁同步电机控制策略。
1. 模型预测控制(MPC):MPC通过建立电机的预测模型,实现对电机未来行为的预测和控制。
该策略具有较好的鲁棒性和抗干扰能力,能够提高系统的稳定性和动态性能。
2. 无模型自适应控制(MFAC):MFAC不需要建立电机的精确数学模型,通过在线学习和自适应调整控制器的参数,实现对电机的精确控制。
该策略具有较好的适应性和抗扰动能力。
3. 模糊控制和神经网络控制:这两种策略结合了人工智能的思想,通过模拟人脑的思维方式和学习能力,实现对电机的智能控制。
模糊控制适用于处理不确定性和非线性问题,而神经网络控制则具有强大的学习和优化能力。
五、应用研究先进控制策略在永磁同步电机传动系统中的应用研究已经取得了显著的成果。
《永磁同步电机传动系统的先进控制策略及应用研究》

《永磁同步电机传动系统的先进控制策略及应用研究》篇一一、引言随着科技的发展和工业自动化的进步,永磁同步电机传动系统(PMSM Drive System)已经成为众多工业领域中不可或缺的一部分。
由于其高效、高精度、低噪音等特点,PMSM得到了广泛的应用。
然而,如何实现PMSM传动系统的稳定、高效和精确控制,一直是研究者和工程师们关注的焦点。
本文将重点探讨永磁同步电机传动系统的先进控制策略及其应用研究。
二、永磁同步电机传动系统概述永磁同步电机(PMSM)是一种基于永磁体产生磁场和定子绕组中电流相互作用原理的电机。
其传动系统主要包括电机本体、控制器、传感器等部分。
由于PMSM的独特特性,其传动系统需要高精度的控制策略来实现高效稳定的运行。
三、传统控制策略及问题分析传统的PMSM控制策略主要包括矢量控制(VC)和直接转矩控制(DTC)等。
这些策略在许多应用场景下都能实现较好的性能,但在某些复杂环境下,如非线性负载、快速响应等场景下,传统控制策略的局限性逐渐显现。
例如,矢量控制虽然能实现电机的精确控制,但在参数变化和扰动情况下,其鲁棒性较差;直接转矩控制虽然具有快速响应的特点,但在低速运行时易产生转矩脉动等问题。
四、先进控制策略研究针对传统控制策略的不足,研究者们提出了许多先进的控制策略。
其中,模糊控制、神经网络控制、滑模控制等智能控制策略在PMSM传动系统中得到了广泛的应用。
这些策略能够根据电机的实际运行状态,实时调整控制参数,提高系统的鲁棒性和稳定性。
此外,还有一些新兴的控制策略,如模型预测控制(MPC)、优化控制等也在不断发展和完善中。
五、先进控制策略的应用研究(一)模糊控制在PMSM传动系统中的应用:模糊控制通过模拟人的思维方式和经验知识,对电机运行过程中的非线性、时变性和不确定性进行建模和控制。
在PMSM传动系统中,模糊控制可以实现对电机速度和转矩的精确控制,提高系统的动态性能和鲁棒性。
(二)神经网络控制在PMSM传动系统中的应用:神经网络控制能够根据电机的实际运行状态,实时学习和调整控制参数,实现对电机的自适应控制。
永磁同步电动机及控制策略综述

永磁同步电动机及控制策略综述点击数:401王毅兰,徐艳平西安理工大学自动化学院电气工程系,陕西西安710048摘要综述了永磁同步电动机的发展,阐释了永磁同步电动机的控制策略,提出了最新进展与研究热点,展望了永磁同步电机的应用前景。
关键字永磁同步电动机;控制策略;综述Overviews of Permanent Magnet Synchronous Motor and Its Control StrategiesWANG Yilan,XU YanpingXi’an University of Technology,Xi'an Shaanxi 710048 China Abstract The development of permanent magnet synchronous is overviewed,the control strategies of permanent magnet synchronous is introduced,the applied foreground of permanent magnet synchronous is prospected.Keywords permanent magnet synchronous motor(PMSM);control strategies;overviews材料技术的发展,特别是稀土永磁材料,磁性复合材料的出现,加之我国拥有—铁—硼)的储量,使得永磁电机活跃在各个工业生产中。
永磁同步电机(PM 的电机,具有转子转动惯量小、效率高、功率密度大、可靠性高的优点,因此例如在数控机床等场合,永磁同步电动机正在逐步取代直流电机和感应电机。
,明显地减小了体积,减轻了重量,降低了损耗,避免了电机发热,从而提高效果。
MSM 运动控制系统中,它比异步电动机更便于实现磁场定向控制,可以获得特性,使控制系统具有十分优良的动、静态特性。
机的种类和基本结构,永磁同步电机分凸装式、嵌入式和内埋式三种基本形式,如图1 所示,前两种阻与交轴磁阻相等,因此交、直轴电感相等,即Ld=Lq,表现为隐极性质;另,因此Ld<Lq,表现为凸极电机的性质。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
Abstract:This paper presents a review of control strategiy for permanent magnet synchronous motor.All kinds of control strategies for research of permanent magnet synchronous motor are introduced,and the structure of the systems designed by different methods are given. Key words:permanent magnet synchronous motor; vector control; torque control/decoupling control
J np
·dnωp
=Tem-TL
(6)
式中:J 为电机的转动惯量。
若 电 动 机 为 隐 极 电 动 机 ,则 Ld=Lq,选 取 id,iq 及 电 动 机 机 械角速度 ω 为状态变量,由此可得永磁同步电动机的状态方
程式为:
④各相绕组对称,即各相绕组的匝数与电阻相同,各相轴线 相互位移同样的电角度。
高性能的交流调速系统需要现代控制理论的支持,对于交 流电动机,目前使用最广泛的当属矢量控制方案。自 1971 年德 国西门子公司 F.Blaschke 提出矢量控制原理,该控制方案就倍 受青睐。 因此,对其进行深入研究[5]。
矢量控制的基本思想是: 在普通的三相交流电动机上模 拟直流电机转矩的控制规律,磁场定向坐标通过矢量变换,将 三相交流电动机的定子电流分解成励磁电流分量和转矩电流 分量,并使这两个分量相互垂直,彼此独立,然后分别调节,以 获得像直流电动机一样良好的动态特性。 因此矢量控制的关 键在于对定子电流幅值和空间位置(频率和相位)的控制。 矢 量控制的目的 是 改 善 转 矩 控 制 性 能 ,最 终 的 实 施 是 对 id,iq 的 控制。由于定子侧的物理量都是交流量,其空间矢量在空间以 同步转速旋转,因此调节、控制和计算都不方便。 需借助复杂 的坐标变换进行矢量控制,而且对电动机参数的依赖性很大, 难以保证完全解耦,使控制效果大打折扣。 3.3 直接转矩控制
计算机应用
《国外电子元器件》2008 年第 12 期
永磁同步电动机控制策略综述
林 辉, 史富强 ( 西安铁路职业技术学院, 陕西 西安 710014 )
摘要:对永磁同步电动机控制策略进行综述。 介绍发展中的永磁同步电动机控制系统的各种控制策略;给出不同解耦
方法下控制系统的结构图。
关 键 词: 永磁同步电动机; 矢量控制; 转矩控制/解耦控制
案,控制原理 是 :适 当 选 取 id 环 电 流 调 节 器 的 参 数 ,使 其 具 有 相 当 的 增 益 ,并 始 终 使 控 制 器 的 参 考 输 入 指 令 id*=0,可 得 到 id≈id*=0,iq≈iq*, 这样就获 得 了 永 磁 同 步 电 动 机 的 近 似 解 耦 。 图 3 给 出 基 于 矢 量 控 制 和 id*=0 解 耦 控 制 的 永 磁 同 步 电 动 机 调速系统框图。
进行综述,并介绍了永磁同步电动机控制系统的各种控制策 略发展方向。
量 ;ωf 为转 子 角 速 度 (ω=ωf np); 图 1 定子、转子参考坐标系 np 为电动机极对数。
2 永磁同步电动机的数学模型
(2)定 子 磁 链 方 程 为 :
Ψd=Ldid+Ψf
(3)
当永磁同步电动机的定子通入三相交流电时, 三相电
(5)
转子以同步转速旋转。 电枢电流还会产生仅与定子绕组相
(4)电 动 机 的 运 动 方 程 为 :
交链的定子绕组漏磁通, 并在定子绕组中产生感应漏电动 势。 此外,转子永磁体产生的磁场也以同步转速切割定子绕 组,从而产生空载电动势。 为了便于分析,在建立数学模型 时 ,假 设 以 下 参 数 [2-3]:① 忽 略 电 动 机 的 铁 心 饱 和 ;② 不 计 电 机中的涡流和磁滞损耗; ③定子和转子磁动势所产生的磁 场沿定子内圆按正弦分布,即忽略磁场中所有的空间谐波;
矢量控制方案是一种有效的交流伺服电动机控制方案。 但因其需要复杂的矢量旋转变换, 而且电动机的机械常数低 于电磁常数,所以不能迅速地响应矢量控制中的转矩。针对矢 量控制的这一缺点, 德国学者 Depenbrock 于上世纪 80 年 代 提出了一种具有快速转矩响应特性的控制方案, 即直接转矩 控制(DTC)[6-7]。 该控制方案摒弃了矢量控制中解耦的控制思 想及电流反馈环节,采取定子磁链定向的方法,利用离散的两 点式控制直接对电动机的定子磁链和转矩进行调节, 具有结 构简单,转矩响应快等优点。 DTC 最早用于感应电动机,1997 年 L Zhong 等人对 DTC 算法 进 行 改 造 ,将 其 用 于 永 磁 同 步 电 动机控制,目前已有相关的仿真和实验研究。
1 引言
(1)定 子 电 压 方 程 为 :
ud=pΨd+rid-Ψqωf
(1)
近年来,随着电力电子技术、微电子技术、新型电机控制
uq=pΨq+riq+ Ψdωf (2)
理 论和 稀 土 永磁 材 料 的快 速 发 展 ,永 磁 同 步电 动 机 得 以 迅 速 式 中 :r 为 定 子 绕 组 电 阻 ;p 为
在分析同步电动机的数学模型时,常采用两相同步旋转 (d,q)坐标系和两相静止(α,β)坐标系。 图 1 给出永磁同步电 动 机 在 (d,q)旋 转 坐 标 系 下 的 数 学 模 型 [4]。
收稿日期:2008-09-01 稿件编号:200809001
/觶i d /
///-RS
/L
npω
0 //id //ud /L /
Ψq=Lqiq
(4)
流 在 定 子 绕 组 的 电 阻 上 产 生 电 压 降 。 由 三 相 交 流 电 产 生 的 式中:Ψf 为转子磁链。
旋转电枢磁动势及建立的电枢磁场,一方面切割定子绕组,源自(3)电 磁 转 矩 为 :
并在定子绕组中产生感应电动势; 另一方面以电磁力拖动
Tem= np(iqΨd-idΨq)=np[Ψf iq+(Ld-Lq)idiq ]
获得良好的动、静态性能,就必须解决 id,iq 的解耦问题[8]。 若能
控制 id 恒为 0,则可简化永磁同步电动机的状态方程式为:
觶觶觶 觶觶觶觶 觶 觶iq =
-RS /L
-npΨf /L
iq + uq/L
(8)
ω觶 npΨf /J
0
ω -TL/J
此 时 ,id 与 iq 无 耦 合 关 系 ,Te=npΨfiq,独 立 调 节 iq 可 实 现 转 矩的线性化。实现 id 恒为 0 的解耦控制,可采用电压型解耦和 电流型解耦。 前者是一种完全解耦控制方案, 可用于对 id,iq 的完全解耦, 但实现较为复杂; 后者是一种近似解耦控制方
图 2 永磁同步电动机的直接转矩控制框图
虽 然 ,对 DTC 的 研 究 已 取 得 了 很 大 的 进 展 ,但 在 理 论 和
实践上还不够成熟,例如:低速性能、带负载能力等,而且它对
实时性要求高,计算量大。
3.4 解耦控制
永磁同步电动机数学模型经坐标变换后,id,id 之间仍存在
耦合,不能实现对 id 和 iq 的独立调节。 若想使永磁同步电动机
中图分类号: TM301.2
文 献 标 识 码 :A
文 章 编 号 :1006-6977(2008)12-0042-02
Review of control strategy for permanent magnet synchronous motor
LIN Hui, SHI Fu-qiang ( Xi’an Railway Vocational Technical Institute, Xi’an 710014, China)
作者简介:林 辉(1975-),男,陕西武功人,硕士研究生,讲师。 研究方向:控制理论与控制工程。
-42-
永磁同步电动机控制策略综述
3 永磁同步电动机的控制策略
任何电动机的电磁转矩都是由主磁场和电枢磁场相互作 用产生的。 直流电动机的主磁场和电枢磁场在空间互差 90°, 因此可以独立调节;交流电机的主磁场和电枢磁场互不垂直, 互相影响。因此,长期以来,交流电动机的转矩控制性能较差。 经过长期研究,目前的交流电机控制有恒压频比控制、矢量控 制、直接转矩控制等方案。 3.1 恒压频比控制
/觶i q /=//npω -RS /L -npΨj/L ////iq //+//uq /L // (7)
/ /ω觶
///0
npΨf /J -B/J //ω //-TL/J /
由式(7)可见,三相永磁同步电动机是一个多变量系统 ,
而且 id,iq,ω 之间存在非线性耦合关系,要想实现对三相永磁 同步电机的高性能控制, 是一个颇具挑战性的课题。
SPI_RW_Reg(WRITE_REG + EN_AA,0x01); SPI_RW_Reg(WRITE_REG + EN_RXADDR,0x01); SPI_RW_Reg(WRITE_REG + SETUP_RETR,0x0a); SPI_RW_Reg(WRITE_REG + CONFIG,0x4e); } 当 接 收 端 nRF24L01 模 块 配 置 成 PRX 模 式 时 , 配 置 nRF24L01 工 作 在 接 收 模 式 下 ,地 址 是 RX_AW,负 载 数 据 宽 度 是 TX_PL_W, 使 能 接 收 完 数 据 中 断 ,CRC 校 验 位 为 2 字 节,nRF24L01 处于 POWER_UP 状态。 程序如下: void nRF24L01_rx_config(void) { SPI_Write_Buf (WRITE_REG +RX_ADDR_P0,RX_ADDRESS_,RX_AW); SPI_RW_Reg(WRITE_REG + RX_PW_P0,RX_PL_W); SPI_RW_Reg(WRITE_REG + EN_AA,0x01); SPI_RW_Reg(WRITE_REG + EN_RXADDR,0x01); SPI_RW_Reg(WRITE_REG + CONFIG,0x3f); } 5.2 nRF24L01 的数据收发 (1)发送数据 当 nRF24L01 模 块 配 置成 发 送 模式 后 ,向 发送 FIFO 输入数据即可启动传输。 发送 8 Byte 的程序如下: void nRF24L01_send_data (uint8 *data) { SPI_Write_Buf(WR_TX_PLOAD,data,8);