光频梳频域干涉测距主要参数分析及一种改进的数据处理方法
光学频率梳频域和时域
光学频率梳频域和时域
光学频率梳是一种用于精确测量光频率的工具,它在频域和时
域上都有重要的应用。
在频域上,光学频率梳可以被用来精确测量
光的频率,因为它能够产生一系列非常稳定的光脉冲,这些脉冲的
频率之间呈现出非常规律的间隔,就像梳子的齿一样,因此得名为
频率梳。
这种特性使得光学频率梳成为精密光谱测量的重要工具,
例如在光谱学、天文学和原子钟等领域都有广泛的应用。
在时域上,光学频率梳可以被用来实现超快激光技术,通过调
控光学频率梳的光脉冲,可以产生极短的光脉冲,甚至到飞秒或者
阿秒级别,这种超快激光技术在材料加工、生物医学、光通信等领
域都有重要应用。
此外,光学频率梳还可以被用来实现光频率的精
密控制,通过对光学频率梳的调制,可以实现对光频率的精确调控,这对于一些需要高度稳定光源的实验和应用非常重要。
总的来说,光学频率梳在频域和时域上都有着重要的应用,它
不仅可以用来精确测量光的频率,还可以用来实现超快激光技术和
光频率的精密控制,因此在科学研究和工程应用中具有着广泛的应
用前景。
一种消除调频连续波激光测距系统多普勒误差的方法

一种消除调频连续波激光测距系统多普勒误差的方法消除调频连续波激光测距系统多普勒误差的方法调频连续波激光测距系统在工业制造、制药、医疗等领域应用广泛。
随着对精度的要求越来越高,多普勒误差成为制约系统精度的一个重要因素。
本文将介绍一种消除调频连续波激光测距系统多普勒误差的方法。
1. 多普勒效应对调频连续波激光测距系统的影响多普勒效应是指当物体在运动时,它反射出的激光信号的频率会发生变化。
这种变化会影响到调频连续波激光测距系统的距离测量精度。
具体来说,当物体在向测距器移动时,反射出的激光信号会变成高频率;而物体离开测距器时,反射出的激光信号会变成低频率。
这种频率变化会导致得到的距离值出现误差。
2. 消除多普勒误差的方法为了消除多普勒误差,我们可以采用“双向测距”(Two-Way Ranging)的方法。
这种方法利用了激光往返路径相等的性质,在发送激光信号时,在同一时间内,将激光信号同时发射出去,并让它们分别从正向和反向的方向照射目标,接收反射回来的信号后,分别计算两次测距值的平均值。
这样能够消除多普勒误差的影响,提高测距精度。
3. 采用模拟差分技术的消除多普勒误差的方法除了采用双向测距方法以外,我们还可以采用模拟差分技术的方法来消除多普勒误差。
这种方法将两次测距值相减,得到的差值就是多普勒误差对距离的影响。
因此,我们可以根据差值对距离进行修正,从而消除多普勒误差。
4. 结论多普勒误差是调频连续波激光测距系统中一个重要的精度限制因素。
为了消除多普勒误差,我们可以采用双向测距和模拟差分技术两种方法。
这些方法可以有效地提高调频连续波激光测距系统的精度,为工业、医疗、制药等领域的应用提供更精确的测量手段。
光频梳绝对距离测量关键技术及应用

光频梳绝对距离测量关键技术及应用光频梳绝对距离测量是一种基于光学干涉和频谱分析的精密测量技术。
其关键技术主要包括光频梳的产生、光学干涉的测量和控制、以及数据处理和分析。
下面将详细介绍这些关键技术及其应用。
1.光频梳的产生
光频梳是一种具有多个等间隔频率分量的光信号,其产生方式通常是通过非线性光学效应或光参量振荡器等。
在绝对距离测量中,光频梳的频率范围和稳定性对测量精度有着重要影响。
因此,需要采用高精度、高稳定性的光频梳产生技术,以确保测量结果的准确性。
1.光学干涉的测量和控制
光学干涉是光频梳绝对距离测量的核心部分。
通过将待测距离与已知距离的光线进行干涉,可以得到干涉条纹的相位信息。
为了准确测量干涉条纹的相位,需要采用高灵敏度的光电探测器和高速数据采集系统。
同时,还需要对光学干涉系统进行精确的控制,包括光源的波长、干涉臂的长度和角度等,以确保干涉条纹的稳定性和可重复性。
1.数据处理和分析
在获得干涉条纹的相位信息后,需要进行数据处理和分析,以得出待测距离的绝对值。
这需要采用高性能的计算机和相
关软件,对干涉条纹进行快速傅里叶变换、相位解包等处理,以得到距离的绝对值。
同时,还需要对测量结果进行误差分析和校正,以提高测量精度。
应用方面,光频梳绝对距离测量技术在许多领域都有广泛的应用,如激光雷达、光学传感、精密测量等。
例如,在激光雷达中,光频梳绝对距离测量可以用于实现高精度、高分辨率的距离测量和地形测绘;在光学传感中,可以用于实现高灵敏度的气体、液体等物质的浓度和成分检测;在精密测量中,可以用于实现微米甚至纳米级别的距离测量和定位控制。
《干涉型光纤振动传感器定位精度及解调算法研究》
《干涉型光纤振动传感器定位精度及解调算法研究》篇一摘要:随着科技的发展,干涉型光纤振动传感器因其高灵敏度、长距离监测及抗电磁干扰等优势,在众多领域得到了广泛应用。
本文针对干涉型光纤振动传感器的定位精度及解调算法进行了深入研究,分析了传感器的工作原理、影响定位精度的因素以及解调算法的优化策略,旨在提高传感器的性能和实际应用价值。
一、引言干涉型光纤振动传感器利用光干涉原理,通过检测光程差的变化来感知外界振动信号。
由于其独特的优点,该类型传感器在安防监控、周界防范、结构健康监测等领域发挥了重要作用。
然而,随着应用场景的日益复杂,如何提高传感器的定位精度及优化解调算法成为了研究的重点。
二、干涉型光纤振动传感器的工作原理干涉型光纤振动传感器主要由光源、光纤干涉结构、解调系统等部分组成。
当外界振动信号作用于光纤时,会引起光程差的变化,进而导致干涉信号的相位变化。
解调系统通过检测相位变化来还原出振动信号,并进一步进行定位。
三、影响定位精度的因素1. 光纤结构及参数:光纤的结构和参数直接影响到光信号的传输及干涉效果,进而影响定位精度。
2. 环境噪声:外界环境中的各种噪声会对传感器接收到的信号产生干扰,降低定位精度。
3. 解调算法:解调算法的优劣直接决定了从干涉信号中提取振动信息的能力,对定位精度有重要影响。
四、解调算法研究针对解调算法的优化,本文提出了以下策略:1. 改进傅里叶变换算法:通过对傅里叶变换算法进行改进,提高其频域分辨率和抗干扰能力,从而更准确地提取振动信号。
2. 智能解调算法:结合人工智能技术,通过训练模型学习振动信号的特征,实现更精确的解调和定位。
3. 联合解调方法:将多种解调算法进行联合,发挥各自优势,提高解调效果。
五、实验与分析通过实验验证了上述解调算法的有效性。
实验结果表明,改进的傅里叶变换算法、智能解调算法以及联合解调方法均能有效提高干涉型光纤振动传感器的定位精度。
其中,智能解调算法在复杂环境下的性能表现尤为突出。
光频率梳测距原理
光频率梳测距原理光频率梳测距技术是一种基于激光技术的距离测量方法,它利用光频率梳的特殊性质实现高精度的距离测量。
本文将介绍光频率梳测距的原理及其应用。
1. 光频率梳的基本原理光频率梳是一种特殊的光源,它的光谱呈现出均匀分布的频率峰,就像梳子的齿一样。
这些频率峰之间的间距非常规律,可以精确地对应不同的光频率。
光频率梳的产生是通过将一个连续光源的光通过非线性光学效应进行频率转换而得到的。
2. 光频率梳测距原理在光频率梳测距中,首先需要将光频率梳与待测物体进行相互作用。
当激光经过待测物体反射回来时,光频率梳会对反射光进行频率分析。
由于光频率梳的频率峰之间的间距是已知的,通过测量反射光与光频率梳频率峰之间的相位差,就可以计算出待测物体与测量设备之间的距离。
3. 光频率梳测距的优势光频率梳测距技术具有许多优势。
首先,它可以实现非常高的测量精度,通常可以达到亚毫米甚至亚微米级别。
其次,光频率梳测距技术具有非接触性,能够在远距离范围内进行测量。
此外,光频率梳测距技术还具有快速测量速度和高重复性的特点。
4. 光频率梳测距的应用光频率梳测距技术在许多领域中得到了广泛的应用。
例如,在制造业中,它可以用于高精度的零件测量和质量控制。
在地质勘探中,光频率梳测距技术可以用于地下水位的监测和地壳运动的测量。
在航天领域,光频率梳测距技术可以用于卫星定位和导航。
此外,光频率梳测距技术还可以应用于光纤通信、医学影像等领域。
总结:光频率梳测距技术是一种基于光频率梳的特殊性质实现高精度距离测量的方法。
通过对光频率梳与待测物体反射光的频率分析,可以计算出待测物体与测量设备之间的距离。
光频率梳测距技术具有高精度、非接触性、快速测量速度和高重复性等优势,广泛应用于制造业、地质勘探、航天和光纤通信等领域。
随着激光技术的不断发展,光频率梳测距技术将进一步推动距离测量的精度和应用范围的拓展。
基于外差双光学频率梳的多波长干涉测距方法研究

基于外差双光学频率梳的多波长干涉测距方法研究作为一项重大的前沿基础科学研究,引力波的高精度太空探测对激光测距技术提出了百万千米量级测量范围、皮米量级测量精度的极限挑战。
在卫星编队飞行等尖端航天领域中,对激光测距技术的需求也达到了数千米至数百千米范围内纳米量级的测量精度。
现有经典的激光绝对距离测量技术已经完全无法满足上述需求。
近十年来,光学频率梳的出现促进了激光绝对距离测量技术的发展,为满足上述需求提供了潜在可能。
但现有基于光学频率梳的多波长激光干涉测距方法仍存在难以同步生成多尺度合成波长以兼顾测量范围、速度与精度,现有频率梳模型与生成方法影响测量精度和各梳齿干涉测距相位难以高精度、快速分离与提取的问题,无法完全满足上述科学与技术领域对绝对距离测量的要求。
本课题旨在针对上述问题,为激光绝对距离测量技术提出一种具备兼顾大范围、快速和高精度测距潜力,且便于实现量值溯源的多波长激光干涉测量方法,对该方法进行原理分析及实验室条件20米范围的实验验证。
研究成果经继续改进及优化,可推广应用于空间引力波探测和卫星编队飞行控制等前沿科学技术领域。
本课题主要研究内容如下:针对现有基于光学频率梳的多波长干涉测距法难以同步生成多尺度合成波长导致测量范围、速度与精度难以兼顾的问题,结合经典多波长激光干涉测距原理和光学频率梳等间隔梳状多光谱的特性,提出了一种基于外差双光学频率梳的多波长干涉测距方法,该方法以中心梳齿偏频锁定、梳齿间距稍有不同的外差双光学频率梳作为光源,利用其中的众多梳齿同步生成了多个不同尺度的粗测和精测合成波长,对光学频率梳中多梳齿的干涉测距信息进行了融合处理,以此建立了基于外差双光学频率梳多波长干涉测距方法的完整理论模型。
分析及实验结果表明,该方法可实现大范围、快速、高精度距离测量,对中心15条光学频率梳梳齿所生成第8阶合成波长的干涉测距信息进行有机融合,可将距离20m处静止目标30min连续监测过程中,测相误差引入的距离测量不确定度从21.3?m减小为8?m。
光学频率梳频域干涉实现绝对测距

光学频率梳频域干涉实现绝对测距*吴翰钟1) 张福民1)† 曲兴华1)1)(天津大学精密测试技术及仪器国家重点实验室,天津300072)摘 要基于光学频率梳的绝对距离测量技术在航空航天、工业生产等领域发挥着重要的作用。
本文在理论上详细研究了基于光学频率梳的频域干涉绝对距离测量技术,分析了频域干涉实现绝对距离测量的原理,进行了数值模拟,采用四种方法实现了绝对距离的测量,指出数据处理过程中,滤波窗函数对测量结果是有影响的。
比较了不同的方法之间测量结果的差异,结果表明,数据处理过程繁多会引入不同程度的测量误差,简练直接的数据处理方法引入的测量误差较小。
为了消除数据处理过程中,滤波窗函数引入的测距不确定性,采用小波变换重建光谱相位,消除了滤波窗函数引入的误差,使测距结果精确唯一。
PACS :06.30.Bp ,06.60.Jn ,42.25.Hz ,42.62.Eh1 引 言科学家们对自然界的认识是永无止境的,那些超快的粒子运动和极微观的物理现象很早就引起了人们的研究兴趣[1]。
探究这些超快和极微观的世界,需要一种超快且极为精密的工具,光学频率梳就这样应运而生了。
跟许多具有划时代意义的发明或者技术一样,光学频率梳在概念上并不复杂。
时域内,光学频率梳是一个连续的脉冲序列,可以表示为()()()train R E t E t t mT δ=⊗-∑;频域内,光学频率梳是一连串离散的单独的纵模,可以表示为()()()train R E E h ωωδωω=⨯-∑。
科学家们更喜欢把它表示成rep ceo f mf f =+,f rep 是重复频率,f ceo 是初始频率偏移,这就是光学频率梳的两个参数,将这两个参数锁定到一个精确的外部频率源,光学频率梳就成为了一个方便的计量工具。
就这样,光学频率梳实现了微波频标跟光学频标的完美连接[2-8]。
光学频率梳的出现给精密计量领域带来了革命性的改变,人们利用光学频率梳实现了气体密度[9]、物体表面形貌[10]、空气折射率[11]、频率[12]、以及距离[13]等的绝对测量,测量的精度或者分辨率都达到了前所未有的水平。
光频梳效率-概述说明以及解释

光频梳效率-概述说明以及解释1.引言1.1 概述光频梳是一种新型的频率精密测量工具,它以其高效且高准确度的特点在科学研究和应用领域备受关注。
光频梳通过将宽频带的光分解为一系列精确的频率组成,类似于音乐中的音阶,从而能够实现非常高精度的频率计量。
相比传统的频率测量方法,光频梳具备更高的测量速度和更广的频率范围,成为了实验室和工程领域中不可或缺的工具。
本篇文章将主要讨论光频梳效率及其影响因素。
首先,我们将简要介绍光频梳的原理和应用领域。
然后,我们将深入探讨影响光频梳效率的各种因素,如腔长、激光功率、脉冲宽度等等。
通过研究这些影响因素,我们可以更好地理解光频梳的性能和优化方法,从而提高测量效率。
本文的目的是为读者提供一种全面了解光频梳效率的途径,并探讨其在科学研究和技术开发中的重要性。
我们将总结已有的研究成果,并展望未来光频梳技术在各个领域的应用前景。
相信本文内容将对读者深入了解和应用光频梳具有指导意义,为相关研究提供实用的参考。
1.2 文章结构文章结构部分的内容可以包括以下内容:文章结构部分的目的是介绍本篇长文的整体结构和各个章节的内容概要,以帮助读者更好地理解文章的组织结构和主要内容。
本文分为三个主要部分:引言、正文和结论。
首先,引言部分主要包括对光频梳效率的引入和背景介绍。
在引言部分,我们将对光频梳的概念进行简要概述,并介绍光频梳在科学研究和工程应用中的重要性和广泛应用。
其次,正文部分将详细介绍光频梳的原理、应用和效率的影响因素。
在2.1节中,我们将深入探讨光频梳的工作原理,包括其基本原理、构成和工作原理的数学模型等。
2.2节将详细介绍光频梳在不同领域的应用,包括频率计量、光谱学和频率合成等。
2.3节将重点讨论光频梳效率的影响因素,包括激光功率、模式锁定、光学腔和非线性效应等。
最后,结论部分将总结本文的主要内容,并对光频梳效率的意义进行阐述。
在3.1节中,我们将对全文进行总结,简要回顾光频梳的原理、应用和效率的影响因素。
激光干涉仪检测与调整过程讲解
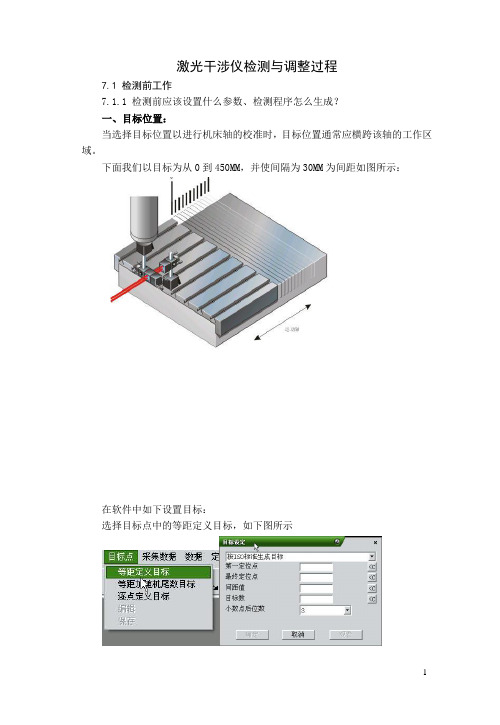
激光干涉仪检测与调整过程7.1 检测前工作7.1.1 检测前应该设置什么参数、检测程序怎么生成?一、目标位置:当选择目标位置以进行机床轴的校准时,目标位置通常应横跨该轴的工作区域。
下面我们以目标为从0到450MM,并使间隔为30MM为间距如图所示:在软件中如下设置目标:选择目标点中的等距定义目标,如下图所示图1 →图2接着弹出如图2的窗口接着我们在内部设置数据如图三所示图3到这里的时候我们将目标点设置完毕,接下来我们要上生成。
二、生成检测程序:激光干涉仪在检测的时候时按照我们在第一步设定的目标点运动的,即从0到450MM每30MM为一个点,因此机床在运动的时候必须和软件设置的一致,所以我们必须生成检测程序。
程序的生成方法图下:选择定义工具栏下的零件程序下的产生按键,如下图所示:图1 →图2在弹出的窗口中输入文件名,并且选择程的序存放路径按保存,会弹出下图:图1 →图2在图1中需要我们选择的为:数控系统的型号。
我们针对我们当前检测机床的数控系统型号作正确的选择,接着弹出图2的窗口,这个窗口要求我们填写与程序相关的数据,我们如下图所示填写:程序号:0001轴名为:Y运行次数为:3选择方向为:双向暂停周期为:4秒越程为:4.0000毫米零件程序类型:线性进给量:1500 ;轴方式为:普通名词解释:程序号:该程序的序号轴名:待校准轴的名称这里记住是大写运行次数:我们希望该程序运行多少次选择方向:在轴上行走的方向时一来一回的间隔点还是只去这样走回时不走暂停周期:等待软件记录数据的时间,这里要根据电脑的性能作调整越程:这里是为了消除方向间隙而设置的,一般选择默认,也可以自行设置零件程序类型:选择运行的方式,因为我们是走直线的所以我们选择线性进给量:机床运动的速度到这里的时候我们已经完成了程序的生成,我们使用文本格式打开文件可以看到程序如下:一定能用得上,所以我们统一使用以下修改过的程序作为标准:机床,但它在系统中的适应度比较强。
基于等光频细分重采样的调频干涉测距方法
Laserranginterferencebasedon equalopticalfrequencysubdivisionresampling
Keywords:measurementandmetrology;nonlinearelimination;resampling;frequencymodulatedcontinuouswave;laser ranging
基 金 项 目:国 家 自 然 科 学 基 金 资 助 项 目 (51675380; 51775379);国家重点研发计划资助项目(2018YFF0212702)
作者简介:包 为 政 (1997),男,硕 士 研 究 生,主 要 从 事 激 光测量技术方面的研究。
第 44卷 第 1期 2020年 1月
激 光 技 术 LASERTECHNOLOGY
Vol.44,No.1 January,2020
文章编号:10013806(2020)01000106
基于等光频细分重采样的调频干涉测距方法
包为政,张福民 ,曲兴华
(天津大学 精密测试技术及仪器国家重点实验室,天津 300072)
摘要:为了解决调频连续波(FMCW)激光器调制非线性导致的测量信号频谱展宽降低激光干涉测距精度的问题, 采用一种基于等光频细分重采样的调频干涉测距方法,进行了理论分析和实验验证,获得了双光路测距系统对不同位置 目标信号等光频细分重采样后的波形数据,并进行了频谱分析。结果表明,通过等光频细分重采样的方法,使用细分后 的时钟信号点对距离大于辅助干涉光路光程差的目标测量信号进行重采样,消除了激光器的调制非线性的影响,并且 避免了采样点数不足引起信号失真的问题;在 4.3m测量范围内,等光频细分重采样测距系统与激光干涉仪相比最大残 余误差不超过 ±18.46μm,最大测量标准差为 23.39μm;该方法使用的辅助干涉光路光程差很短,受环境的影响较小,可 以获得稳定的时钟信号,并且可以减少双光路 FMCW 测距系统的体积与成本。该研究为长距离、高精度调频连续波测 量提供了实用参考。
光纤光栅传感器干涉型解调仪的稳定性分析和改进
文章编号:025827025(2006)1121537205光纤光栅传感器干涉型解调仪的稳定性分析和改进阳 莎,蔡海文,黄 冲,耿健新,瞿荣辉,方祖捷(中国科学院上海光学精密机械研究所,上海201800)摘要 提出了一种利用两种不同温度系数的光纤光栅对来对解调仪的不稳定性进行改进的方法,并进行了理论分析,研究了影响该解调仪稳定性的几个因素.将所研制的传感器布设在东海大桥上,组成传感网络,并用改进后的光纤光栅解调系统对传感器的信号进行解调.在大桥竣工测试时,该传感解调系统表现出较好的性能.关键词 光纤光栅;解调;传感;相位补偿中图分类号 TN 253;TP 212.14 文献标识码 AStability Analysis and Improvement of An Inteferometric Interrogation forFiber B ragg G rating SensorsYAN G Sha ,CA I Hai 2wen ,HUAN G Chong ,GEN G Jian 2xin ,QU Rong 2hui ,FAN G Zu 2jie(S hanghai I nstitute of O ptics and Fine Mechanics ,T he Chinese A cadem y of S ciences ,S hanghai 201800,China )Abstract A compensation method with theoretical analysis is proposed to compensate the instability of interrogation by using a pair of fiber Bragg grating (FB G )with different thermal coefficients.The factors that influenced the stability of interrogation had been investigated.Several sensors were installed in Donghai Bridge and formed a sensor network.The signals f rom sensors were demodulated by the improved interrogator on the final test of Donghai Bridge ,which shows good performance.K ey w ords fiber Bragg grating ;demodulator ;sensor ;phase compensation 收稿日期:2006204210;收到修改稿日期:2006205229 基金项目:上海市科学技术委员会科研计划项目(03dz11003)资助课题. 作者简介:阳 莎(1981—),男,湖北天门人,中国科学院上海光学精密机械研究所信息光学实验室硕士研究生,主要从事光纤光栅制作、光纤传感等方面的工作.E 2mail :yangsuo @ 导师简介:瞿荣辉(1973—),男,湖北人,中国科学院上海光学精密机械研究所研究员,博士生导师,目前研究方向为光纤激光器及光纤传感.E 2mail :rhqu @1 引 言 随着经济的发展,我国基础设施建设的规模不断加大,新建的高楼、道路、桥梁、大坝几乎遍地开花.对于这些建筑物健康状况的传感、测控成为一个关系国计民生的重要课题.传感器和传感技术成为科学研究和技术开发的热点.光纤和光纤光栅相对于环境温度和应力应变具有敏感特性,而且其具有体积小、重量轻、抗电磁干扰性强、耐高温、耐潮湿、耐腐蚀、集信息传输与传感于一体等一系列优点,已经被广泛应用于传感系统[1,2].光纤光栅传感的基本原理,是测量其反射光谱峰值波长值随待测传感量的变化.在实际应用系统中实现峰值波长的准确测量,是这一技术的关键问题之一.文献[3]报道了用一种基于3×3耦合器的马赫2曾德尔干涉仪(MZI )来测量光纤光栅反射峰值波长移动量的方法.该干涉仪具有动态范围大、可判断波长移动方向等优点.但是,与通常光纤干涉仪的特点一样,其特性会随环境温度、外界机械力和振动而变化.稳定性成为仪器实用化的主要障碍.本文对3×3光纤耦合器构成的非平衡马赫2曾第33卷 第11期2006年11月中 国 激 光C H IN ESE J OU RNAL O F L ASERSVol.33,No.11November ,2006德尔干涉仪解调系统的稳定性进行了实验研究,分析了基本原因,采用两个不同温度系数的光纤光栅组成光纤光栅对作为补偿器,对干涉仪的漂移作实时的监控和补偿,改进了干涉仪解调系统的稳定性.该解调系统在东海大桥应力温度传感系统中进行了现场实验,取得了较好的效果.2 光纤光栅的解调和补偿2.1 干涉仪解调原理光纤布拉格光栅(FB G )的谐振波长随应变和温度的改变有很好的线性特性.实验测定,对于1550nm 波段的石英光纤,光纤光栅的应变系数和温度系数分别为α=1.2p m/με,β=11p m/℃[4].光纤光栅的这种线性特性正被广泛地应用于应变和温度的传感器.在光纤光栅传感系统中,必须解决测定其峰值波长的解调技术.光纤马赫2曾德尔干涉仪[5]和扫描法布里2珀罗(F 2P )干涉仪[6]是最常用的方法.实验中采用的是基于马赫2曾德尔干涉仪的解调技术,如图1所示.其中,FB G1~FB G3表示光纤光栅传感探头.宽带光源发出的光经过2×2耦合器后入射到多个光纤布拉格光栅传感头,各光纤布拉格光栅反射相应波长的信号光,经耦合器进入扫描光纤法布里2珀罗滤波器(FFP ),并在不同时间被扫描后进入非平衡马赫2曾德尔干涉仪.马赫2曾德尔干涉仪的三个输出由三个光电二极管同时探测,经放大后由数据采集卡发送给计算机,再用Labview 编程进行计算和处理.图1光纤光栅传感解调仪的结构图Fig.1Schematic diagram of FB G sensor interrogation文献[3]已经作了分析,指出采用3×3耦合器构成马赫2曾德尔干涉仪作为解调器,具有灵敏度不存在死区、能区分相移方向、可进行相位展开(Phase 2unwrapping )扩大量程等优点.但是与许多干涉仪型的解调技术一样,存在着稳定性的问题.实验采用如图1中虚线框内的两个光纤光栅FB G 2a 和FB G 2b 组成的补偿模块[7],改善干涉仪的稳定性.在无外界扰动的情况下,干涉仪将相位转换为波长的公式为<=2πn ΔL/λ,(1)式中<为干涉仪两臂的相位差,n 为光纤的折射率,ΔL 为干涉仪两臂的臂长差,λ为光栅的反射波长.由传感光纤布拉格光栅反射的光波长的变化,在马赫2曾德尔干涉仪上产生干涉相位差的变化为d <=-2πn ΔL λ2d λ=χd λ,(2)这里引入一个比例系数χ=-2πn ΔL λ2,对于不同中心波长的传感光纤布拉格光栅,其取值也不同.χ的取值也可以根据实际波形的周期计算和测定.考虑到3×3耦合器分束比偏离1∶1∶1的情况,以及三个探测器灵敏度及其放大电路放大倍数的差别,经推导[3],解调后信号光的相位变化计算得tanΔ<(t )=3[α3I 2(t )-α2I 3(t )]α3I 2(t )+α2I 3(t )-2α2α3I 1(t ),(3)其中I 1,I 2,I 3为进入数据采集卡的三个通道的信号,即干涉仪三个输出端口的信号光经光电转换和放大后的电信号.α2和α3分别为I 2和I 3两个通道相对于I 1通道的比值,它反映了耦合器偏离1∶1∶1分束比及三路光电转换特性的差异.从式(3)可以看出,通过测三路放大后的信号I 1,I 2和I 3的值,就可以得到相位的变化,进而由式(2)计算出入射光波的波长变化.2.2 稳定性分析及补偿措施测试光源光强的起伏,将会直接影响测量信号的大小.在用式(3)计算相移时,光源光强的起伏将会自动抵消.当然,这要求光电转换处于线性的范围内.从干涉仪相位角的测量得到波长的变化,必须保证干涉仪两臂的折射率和臂长不变.实际上,恰恰是由于外界条件的变化,主要是温度和应力的波动,导致光经过干涉仪两臂时的光程差的变化,引起了干涉仪的相位漂移.一般光纤干涉仪两臂的长度都比较长,因此光程差漂移的影响比较严重.由式(1)可见,讨论干涉仪的相位变化至少应当考虑波长、折射率、臂长三个因素δ<=-2πn ΔL λ2δλ+2πΔL λδn +2πn λδ(ΔL )=δ<λ+δ<env ,(4)式中第一项在本工作中是待测量;后两项反映了由8351中 国 激 光 33卷 环境的变化导致的干涉仪相位的随机漂移,即合并表示为δ<env ,它一般是一个缓变量.δ<λ为传感光纤光栅的相移.光纤的热膨胀系数α=0.55×10-6K -1,热光系数β=6.67×10-6K -1.实验中,干涉仪的臂长差为ΔL =1.6mm ,每臂长约L =1m ,若两臂的温度差变化ΔT ,则δ<env =2πΔL λδn +2πn λδ(ΔL )=2πΔL λn ・β・ΔT +2πn λL ・α・ΔT ,其中n =1.4502为光纤纤芯的折射率.对于波长为1550nm 的光波来说,当ΔT =0.1℃时,δ<env =0.05165×2π.干涉仪在1550nm 处干涉曲线的周期为1.5nm ,所以两臂的温度变化相差0.1℃时δ<env 对应的波长改变量为2π1.5nm =δ<env Δλ,即Δλ=77.48p m.可以看出温度的微小变化给干涉仪带来很大的波动.再加上外界的振动、应力等因素的影响,干涉仪的稳定性就会更差,这对于解调仪的实用化是一个很大的障碍.图2为在传感光栅未受到外力作用的条件下,实验测量得到的在50min 内相位(通过式(2)转换为波长的变化,以皮米为单位)的漂移情况.曲线2是在无补偿情况下传感光栅波长相位的漂移.可以看出,对于未受应力影响、峰值波长没有变化的传感光栅,解调后的光信号波长在不到1h 的时间中发生了30多皮米的漂移.这种漂移就是由于干涉仪受到外界扰动所引起的.无补偿情况下的这种漂移对于快速变化的待测应变的传感,影响还不是很大,但是对于缓慢变化和小的待测应变的传感,影响就很大.图2有补偿和无补偿情况下解调仪的测试信号曲线Fig.2Interrogated signal curves with andwithout compensation为了能够准确直观地观察到传感光栅波长的变化,我们需要监测马赫2曾德尔干涉仪的漂移情况.为此,采用由两个不同温度系数的光纤光栅组成的光纤光栅对构成补偿模块,如图1中虚线方框所示.这两个光纤光栅分别固定封装在高、低膨胀系数的两种材料上,本文采用铝块和石英.封装后可以测量得到它们的峰值波长温度系数,然后在不受外力的条件下安装在解调仪内部.解调仪在使用的时候,在每一次测量传感光纤光栅波长变化的同时,也测量补偿模块光纤光栅的波长变化.这两个补偿光栅反射的光波,经过干涉仪后的相位变化可以表示为δ<a =γa δT +δ<env ,(5a )δ<b =γb δT +δ<env ,(5b )其中δ<a 和δ<b 表示两补偿光栅的相位变化,γa 和γb 为补偿模块中两个光纤光栅的相位温度系数,它等于峰值波长温度系数乘以式(2)中的系数χ,可以事先测定.δT 为补偿模块处的温度变化.由式(5a )和(5b )可以得到δT =(δ<a -δ<b )/(γa -γb ),(6a )δ<env =(γb δ<a -γa δ<b )/(γa -γb ),(6b )由此可见,测量补偿模块中的两个光纤光栅的相移,就得到环境因素引起的随机漂移因子δ<env .将其代入式(4),就可以扣除干涉仪的零漂相移,得到传感光纤光栅的相移δ<λ,从而补偿干涉仪漂移的影响.由上述补偿原理可知,补偿模块中两个光纤光栅的峰值波长,不能与传感光纤光栅的峰值波长相同,这一点在传感相同设计时需要加以考虑.图2中曲线1是根据上述方法对曲线2的数据作实时校正后的波长,可以看到零漂降到了1~2p m 量级,反映出良好的补偿效果.图3为在实验室中对安装在悬臂梁上的传感光纤光栅进行测量的实验结果.对悬臂梁施加应力,使光纤光栅的波长逐次变化10p m ,20p m ,30p m ,40p m ,50p m ,然后再释放施加在光栅上的力,如此重复三次.由多波长计和解调仪同时观察其波长变化量,其数据如表1所示.解调仪检测到的波长变化,经补偿模块的数据校正后,如图3中曲线3所示,曲线1和2为干涉仪测得的两个补偿光栅的信号,反映了干涉仪的漂移情况.补偿计算的波长变化量与多波长计测试结果相差在2p m 之内.从图中还可以看出,每次释放施加的力后,光栅的波长变化又回到了零点,说明补偿效果良好.如果没有经过补偿光栅的补偿,则每次释放施加的力后,解调仪显示的波长变化值就不会回到零点,而是相对零点有一个偏移,这个偏移量与干涉仪受到的扰动大小有关,图3中曲线1和2的信号就反映了扰动的大小.9351 11期 阳 莎等:光纤光栅传感器干涉型解调仪的稳定性分析和改进图3对光栅多次施力重复三次的解调曲线Fig.3Interrogated curves by pressing the FB G sensorfor several times表1解调仪和多波长计测试结果的比较T able 1Comparison of test result betw een interrogationand multi 2w avelength meterMulti 2wavelength display /pmInterrogation display /pm First Second Third 001010111211202121213031323240414242505151512.3 其他不稳定性因素除了干涉仪两臂的折射率和臂长之外,还有几个方面的因素会对解调仪的稳定性有所影响.第一,构成干涉仪的2×2和3×3光纤耦合器的稳定性,是一个重要因素.虽然这两种元件都是市场供应的成熟产品,在光纤通信系统中广泛应用,但是对于干涉仪来说,还有更高的要求,耦合器的保偏性、分束比随温度的波动等因素都会影响到解调仪的稳定性.其次,在解调仪中采用的扫描光纤法布里2珀罗滤波器的稳定性也是需要考虑的因素.虽然在该解调仪中光纤法布里2珀罗滤波器主要用于传感光纤光栅波长的解复用,不起确定波长的作用,但是它的温度稳定性,包括其驱动器的稳定性,还是一个必须考察的问题.实验发现,由于驱动光纤法布里2珀罗滤波器工作的三角波电压会发生漂移,使得光纤法布里2珀罗滤波器的扫描范围发生变化.三角波电压的频率不稳定性也对解调结果带来影响.而且即使是在恒定的电压下,随着周围温度等的影响,光纤法布里2珀罗滤波器的透射波长和峰值功率也都会有比较大的变化.此外,实际应用中的电磁干扰对解调仪的影响也需要检验,特别是对于微弱信号的检测,必须采用良好的电磁屏蔽.文献[3]介绍了采用相位展开算法扩大传感测量范围的方法.根据非平衡马赫2曾德尔干涉仪的原理,干涉周期与臂长差成反比.由式(2)可得,检测的相移对于波长变化的灵敏度正比于臂长差:5<5λ=-2πn ΔL λ2.适当增加臂长差,将提高这一灵敏度,也即提高被测量对于噪声和漂移干扰的比值:δ<λ/δ<env ,有利于测量的稳定性.但是另一方面,也增加了相位展开计算的工作量和精度要求.因为ΔL 的增加将减小干涉仪的自由光谱区:Δλ=λ2/(n ΔL ).这需要在设计传感系统和解调仪时,根据实际使用要求做出折中考虑.3 光纤光栅准分布式传感系统和解调仪的实际应用 在东海大桥进行了使用文中研制的光纤光栅传感解调仪的实验.为了监测大桥的健康情况,在东海大桥斜拉索部位的桥箱里安装了光纤光栅应变传感器.每个桥箱里分别安装五个不同探测点,用来探测五个不同部位的应变情况.其中三个探测点同时安装应变传感器和温度传感器,两个探测点只安装应变传感器.温度传感器用来监测桥箱内温度的变化,以补偿应变传感器的温度效应.每个桥箱内的八个传感光栅组成一个传感网络,其传感信号用解调仪解调并显示出来.图4为安装的一个应变传感器的图片.图4传感器安装的现场图Fig.4Local picture of installed sensor在大桥竣工测试中,仪器记录了不同负载下的应变情况.静载测试时,24辆卡车缓缓地在桥上前进,并在两个斜拉索之间的主通航孔停留几分钟.动载测试时,2辆卡车一组以不同速度驶过大桥.大桥静载测试时,24辆卡车一齐开到停泊点,451中 国 激 光 33卷 然后静止不动.撤消静载时,是分批启动撤走.图5为加静载和撤消静载时,其中一个传感器的波长变化曲线.可以看出传感器反映了加静载和撤消静载时卡车的应变情况.图5在桥面加静载和撤消静载时一个传感器波长的变化曲线Fig.5Wavelength change of a sensor by adding andremoving static load onbridge图6两辆卡车以10km/h (a ),20km/h (b )和40km/h (c )的速度从桥面驶过时的测试信号Fig.6Interrogated signal when two trucks run throughthe bridge with the volocity of 10km/h (a ), 20km/h (b )and 40km/h (c ) 图6(a ),(b ),(c )分别为卡车以10km/h ,20km/h 和40km/h 的速度从桥上驶过时,其中一个传感器测得的信号.从图中可以看到,两辆卡车驶过桥面时引起先后应变的变化.行驶速度越快,测试信号形状“W"越窄.4 结 论 建立了一个由2×2和3×3光纤耦合器构成的非平衡马赫2曾德尔干涉仪,用来作为准分布式光纤光栅传感系统的解调仪.分析了影响该解调仪稳定性的几个因素.采用光纤光栅对的补偿模块,较好地解决了干涉仪的漂移问题.报道了传感系统和解调仪在东海大桥应力传感中实际应用的初步结果.用光纤干涉仪作为光纤光栅传感器的解调方法,具有成本低廉、使用方便的优点,是光纤光栅传感技术推广应用的一个技术支持.本文工作表明,采用补偿方法解决解调仪稳定性后,就有可能将干涉仪推向实际应用.参考文献1 Turan Erdogan.Fiber grating spectra [J ].J.L i ght w aveTechnol.,1997,15(8):1277~12942 V.Bhatia ,A.M.Vengsarkar.Optical fiber long 2period gratingsensors [J ].Opt.L ett.,1996,21(9):692~6943 Huang Chong ,Cai Haiwen ,Geng Jianxin et al..Wavelengt hinterrogation based on a Mach 2Zehnder interferometer wit h a 3×3fiber coupler for fiber Bragg grating sensors [J ].Chinese J .L asers ,2005,32(10):1397~1400 黄 冲,蔡海文,耿健新等.基于3×3耦合器的马赫2曾德尔干涉仪的光纤光栅波长解调技术[J ].中国激光,2005,32(10):1397~14004 Huang Rui ,Cai Haiwen ,Qu Ronghui et al..Separatelymeasurement of strain and temperature using a single fiber Bragg grating [J ].Chinese J .L asers ,2005,32(2):232~235 黄 锐,蔡海文,瞿荣辉等.一种同时测量温度和应变的光纤光栅传感器[J ].中国激光,2005,32(2):232~2355 A. D.Kersey ,T. A.Berkoff.Dual wavelengt h fiberinterferometer wit h wavelengt h selection via fibre Bragg gratingelement s [J ].Elect ron.L ett.,1992,28(13):1215~12166 A. D.Kersey ,T. A.Berkoff ,W.W.Morie.MultiplexedBragg grating fiber 2laser strain 2sensor system wit h a fiber F 2Pwavelengt h filter [J ].Opt.L ett.,1993,18(16):1370~13727 M. D.Todd ,G. A.Johnson ,B.L.Alt house.A novel Bragggrating sensor interrogation system utilizing a scanning filter ,a Mach 2Zehnder interferometer and a 3×3coupler [J ].Meas.S ci.Technol.,2001,12(12):771~7771451 11期 阳 莎等:光纤光栅传感器干涉型解调仪的稳定性分析和改进。
双光学频率梳的多波长外差干涉测距
双光学频率梳的多波长外差干涉测距下载温馨提示:该文档是我店铺精心编制而成,希望大家下载以后,能够帮助大家解决实际的问题。
文档下载后可定制随意修改,请根据实际需要进行相应的调整和使用,谢谢!并且,本店铺为大家提供各种各样类型的实用资料,如教育随笔、日记赏析、句子摘抄、古诗大全、经典美文、话题作文、工作总结、词语解析、文案摘录、其他资料等等,如想了解不同资料格式和写法,敬请关注!Download tips: This document is carefully compiled by theeditor.I hope that after you download them,they can help yousolve practical problems. The document can be customized andmodified after downloading,please adjust and use it according toactual needs, thank you!In addition, our shop provides you with various types ofpractical materials,such as educational essays, diaryappreciation,sentence excerpts,ancient poems,classic articles,topic composition,work summary,word parsing,copy excerpts,other materials and so on,want to know different data formats andwriting methods,please pay attention!双光学频率梳的多波长外差干涉测距技术探析在精密测量领域,双光学频率梳的多波长外差干涉测距技术因其高精度、宽动态范围和快速测量能力,已经引起了广泛的关注。
白光干涉仪数据处理方法
白光干涉仪数据处理方法一、引言在光学实验研究中,白光干涉仪是一种常用的仪器,用于测量光的干涉现象。
对于白光干涉仪所产生的数据,进行正确的处理和分析是非常重要的。
本文将详细介绍白光干涉仪的数据处理方法,包括数据采集、干涉图像处理、干涉条纹的分析等内容。
二、数据采集1.双光束干涉原理双光束干涉是白光干涉仪的基础原理,需要将光源分为两束光,分别经过不同的光程,再通过相分离、重合等操作得到干涉图案。
在数据采集时,需要保证两束光程差稳定,可采用光路调节和步进电机等方式实现。
2.数据采集设备数据采集设备一般包括光源、光路调节器、光电探测器和数据采集卡等。
光电探测器用于将光信号转化为电信号,数据采集卡负责将电信号转化为数字信号并进行采样。
3.数据采集参数设置在进行数据采集前,需要设置采样率、采样时间和采样间隔等参数。
采样率应根据实际需要进行设置,采样时间要保证足够长,采样间隔要根据干涉条纹的频率决定。
4.数字滤波数据采集得到的信号往往存在噪声,需要进行数字滤波来减小噪声的影响。
常用的滤波方法有低通滤波、高通滤波和中值滤波等,选择适当的滤波方法可以获得更好的信号质量。
三、干涉图像处理1.图像获取干涉图像的获取可以通过光电探测器直接获得,也可以通过摄像机等设备获取。
对于后者,需要将模拟图像转化为数字图像进行处理。
2.色度校正白光干涉仪的干涉图像中常常存在色度差异,需要进行色度校正。
色度校正可以通过拍摄白板图像,提取白板中的白色信息,然后根据白板图像对干涉图像进行校正。
3.图像增强干涉图像的对比度较低,需要进行图像增强来提高图像质量。
常用的图像增强方法有直方图均衡化、增强滤波和空间域增强等。
四、干涉条纹分析1.条纹提取干涉图像中的干涉条纹通常较细,需要进行条纹提取。
条纹提取可以通过边缘检测、灰度变换和频域滤波等方法来实现。
2.条纹解调干涉条纹解调是提取干涉所需的关键步骤,可以根据干涉条纹的特点选择合适的解调方法。
常用的解调方法有空间域相位解调、Fourier变换和小波变换等。
光学频率梳 激光信号 频率测量 傅里叶变换
光学频率梳激光信号频率测量傅里叶变换嘿,伙计们!今天咱聊聊一个非常酷炫的玩意儿——光学频率梳。
这可是科技界的一大突破,让我们一起来看看它是怎么工作的吧!咱们来简单介绍一下光学频率梳。
它就像是一把神奇的梳子,可以把光梳成一束束细小的光束,每个光束都有一个特定的频率。
这个频率可不是随便定的,而是跟梳齿的大小有关。
你可以把梳齿想象成一个个小齿轮,每个齿轮都代表一个频率。
当光线通过梳子时,它会被梳齿上的小齿轮卡住,然后被引导到一个特定的频率上。
这样一来,我们就可以测量出这个特定频率的光线了。
咱们来谈谈激光信号。
你知道激光吗?它就是一种特殊的光,它的光线非常集中,而且方向非常明确。
激光信号就是利用这种特殊的光线来传递信息的。
比如说,咱们用激光信号来传输音乐、电影等等。
哇,这可真是高科技啊!现在,咱们要说说频率测量了。
频率测量是什么呢?其实就是用一些仪器来测量光的频率。
有了光学频率梳,我们就可以更精确地测量光的频率了。
而且,这个过程还非常简单,就像梳头发一样轻松愉快!咱们来聊聊傅里叶变换。
傅里叶变换是一种数学方法,它可以把一个复杂的信号分解成很多简单的正弦波。
这些正弦波的频率和振幅都是有规律可循的。
有了傅里叶变换,我们就可以更好地理解光学频率梳的工作原理了。
光学频率梳、激光信号、频率测量和傅里叶变换这些概念听起来好像很高大上,其实它们都是为了解决实际问题而产生的。
它们让我们能够更精确地测量光的频率,从而更好地传输信息。
下次当你看到一束亮闪闪的光时,不妨想一想它背后的故事,说不定你就会发现一个神奇的世界呢!。
一种基于电光调制光频梳光谱干涉的绝对测距方法

一种基于电光调制光频梳光谱干涉的绝对测距方法*赵显宇 曲兴华 陈嘉伟 郑继辉 王金栋 张福民†(天津大学, 精密测试技术及仪器国家重点实验室, 天津 300072)(2020 年1 月12日收到; 2020 年2 月16日收到修改稿)提出了一种基于电光调制光学频率梳的光谱干涉测距方法. 理论分析了电光调制光学频率梳的数学模型和光谱扩展原理, 并分析得出了光谱干涉测距方法的非模糊范围和分辨力的影响因素. 在实验中, 使用三只级联的电光相位调制器调制单频连续波激光生成了40多阶高功率梳齿状边带, 并通过单模光纤和高非线性光纤对电光调制器输出的激光进行光谱扩展, 得到重复频率为10 GHz, 光谱宽度达30 nm的光学频率梳.将该光频梳作为光谱干涉测距装置的光源, 可以实现无“死区”的绝对距离测量. 另外, 使用等频率间隔重采样和二次方程脉冲峰值拟合算法对测量结果进行数据处理, 可以修正系统误差, 提升测距精度. 实验结果表明, 在1 m的测量范围内, 使用该装置可以在任意位置达到 ± 15 µm以内的绝对测距精度.关键词:光学频率梳, 电光调制, 光谱干涉, 绝对测距PACS:06.20.–f, 06.30.Bp, 42.25.Hz DOI: 10.7498/aps.69.202000811 引 言近年来, 高端装备制造的发展, 比如卫星编队飞行、大飞机、大型科研装置的制造与加工安装,对高精度的大尺寸测量提出了需求. 另一方面, 在超快激光和光学频率梳(optical frequency comb,以下简称“光频梳”)发明之后, 科学家们也一直在探究他们的应用. 自从2000年Minoshima和Matsumoto发明了一种基于超快激光纵模自拍频的相位法测距技术之后[1], 20年来, 科学家对基于超快激光和光频梳的绝对测距技术进行了广泛的研究, 陆续提出了几种测距方法. 具体可以分为基于时域脉冲的测距方法和基于频域特征的测距方法两大类. 其中扫描位移台干涉、调节腔长干涉和双光梳异步光学采样是三种主要的基于时域脉冲的测距手段[2−7], 他们依靠脉冲在空间上的相遇会产生互相关干涉条纹, 通过解算互相关条纹就可以判断脉冲的位置, 进而解算出待测距离; 而频域法又可以分为多波长干涉法和光谱干涉法两类, 多波长干涉法是通过光频梳不同纵模之间的波长差组建合成波长, 检测合成波长的相位变化来求解被测距离, 最典型的是纵模自拍频合成波长法[1]和多外差合成波长法[8−10]. 光谱干涉法又被称为色散干涉法[11−16], 光频梳中不同的纵模代表不同波长的激光信号, 这些信号在经过相同的测量臂后一起与参考臂的信号相干涉, 不同波长的光干涉时的相位不同, 导致干涉后的条纹亮度就不同, 将干涉后的光频梳放在光谱仪上观察, 会看到光频梳光谱中出现一个类似正弦调制的包络, 这个包络的频率正与被测距离相关, 解算出包络的频率, 就可以推算出待测距离. 光谱干涉测距方法相对于扫描位移台干* 国家重点研发计划(批准号: 2018YFB2003501, 2018YFF0212702)、国家自然科学基金(批准号: 51675380, 51775379)和天津市重点研发计划科技支撑重点项目(批准号: 18YFZCGX00920)资助的课题.† 通信作者. E-mail: zhangfumin@© 2020 中国物理学会 Chinese Physical Society 涉、调节腔长干涉这两种时域干涉方法, 结构中不需要可动部件, 可靠性好; 相对于双光梳异步光学采样法和多外差方法, 系统仅需一台光频梳, 而且测量装置简单, 测量结果直观、易解算. 所以近些年来光谱干涉测距方法得到很多科学家们的重视. 2006年, Joo与Kim[12]提出通过光谱频域干涉实现绝对测距的方案, 并在0.89 m测量范围内取得了约1.46 mm非模糊范围和约7 nm的分辨力. 2015年, van den Berg等[13]使用虚拟成像相控阵高分辨力光谱仪解析出1 GHz钛宝石激光器的每个梳齿, 并在实验中结合了光谱干涉测量法、白光干涉测量法和多波长干涉测量法, 在50 m的测量范围内达到了10–8量级的相对测距不确定度. 随后, 中国科学院周维虎团队[14,15]基于飞秒激光光谱干涉技术研制出了飞秒激光跟踪仪, 实现了微米级的三维坐标测量. 2017年Lesundak等[16]使用法布里-珀罗腔将一个1 GHz重复频率的光频梳滤波为56 GHz重复频率的光频梳, 在减少了测距非模糊范围的同时也消除了测距“死区”, 并于实验中得到了50 m范围内与参考干涉仪相比0.5 µm的测距一致性. 这些研究验证了光谱干涉技术的测距能力, 并证明了该方法可以投入工业应用的潜力.现在的光学频率梳一般是通过将超快激光器锁定住重复频率和偏移频率来产生的. 而超快激光器又主要有固体激光器、可饱和吸收体锁模激光器和光纤锁模激光器等几种类型, 他们都是根据锁模原理直接生成脉宽极窄的激光脉冲, 对应的光谱宽度也能达到数十乃至数百纳米以上的半高全宽. 这些锁模机制的超快激光器经过长时间的研究其稳定性也有很大提高. 不过基于锁模激光器的光频梳的稳定性还有待发展, 其目前所采用的一些主流的频率锁定机构在应对一些环境变化或者振动等条件下有可能会失去其锁频状态, 剧烈的变化还有可能导致模式“失锁”, 在工业现场的大规模应用还存在挑战. 然而, 基于电光调制的光学频率梳生成技术在近些年得到比较快的发展, 电光调制光频梳因生成机理不同, 不存在锁模激光器所有的“失锁”状态, 且其重复频率易于锁定和溯源, 有望解决光频梳运行稳定性的问题. 1993年, Kourogi等[17]开始尝试使用铌酸锂(LiNbO3)相位调制器在一个输出波长为1.5 µm的半导体激光器周围调制出多根梳齿, 得到了类似光频梳的基本频域特征, 随后, 基于强度调制器和基于相位调制器的光频梳生成技术被陆续提出并得到广泛的研究[18−22]. 科学家们还发现, 通过将调制器级联可以生成更多的梳齿和更宽的光谱, 并且光谱平坦度可以通过不同形式调制器组合的方式得到优化[23], 这使得电光调制光频梳在精密光谱学等领域得到很高的重视. 2013年, Wu等[24]发现可以通过单模光纤将电光调制光频梳的时域脉冲压缩到ps量级, 压缩后的光频梳脉冲经过高非线性光纤可以完成超连续谱的生成. 2014年, Yang等[25]开始将电光调制光梳应用到测距中, 使用双电光调制光频梳通过合成波长测距法在10 m范围内得到15 µm的测距精度. 2018年, 本课题组提出三电光调制光频梳绝对测距方案, 使用粗精结合的外差合成波长测距方案将测距系统的非模糊范围提升到百米以上, 同时绝对测距精度保持在1 µm以内[10]. 电光调制光频梳生成简单、易维护, 不存在传统锁模激光器的“失锁”情况, 可长时间运行. 但如果使用上述基于双光频梳或三光频梳的测距方法就会失去成本优势, 且数据处理过程比较复杂. 如果能将电光调制光频梳与光谱干涉测距方法结合起来, 将会极大提高整套系统的运行稳定性, 并有效降低成本, 是非常值得研究的课题.本文提出了一种基于电光调制光学频率梳的光谱干涉测距方法, 使用三组级联的相位调制器对一个单频连续波激光器进行光谱调制得到光学频率梳, 并通过单模光纤和高非线性光纤对生成的光频梳进行光谱展宽, 得到重复频率为10 GHz, 光谱全宽约30 nm的电光调制光学频率梳. 将该光频梳作为光源引入到光谱干涉测距系统中, 在光谱仪上采集干涉信号, 并使用等频率间隔重采样和脉冲二次方程拟合等算法对测距结果进行处理, 在绝对测距验证实验中得到了优于 ± 15 µm的测距不确定度.2 电光调制光频梳生成及光谱扩展理论分析一束单频连续波激光通过电光晶体, 如果在晶体两端加载电学信号, 根据克尔效应, 输出的激光就会被调制上相关的微波信号, 在光谱上的表现就是激光的中心频率周围会出现等频率间隔分布的边带信号, 而这个频率间隔就等于所加载的电学信号的频率. 巧合的是, 光学频率梳的光谱模型也是一系列等频率间隔分布的纵模梳齿, 所以可以使用电光调制技术来生成光学频率梳. 电光调制光频梳的生成原理如图1所示.单频连续波激光可以被表示为E 0ω0其中 表示光在时域中的强度, 表示光的频率.当其经过第一个相位调制器后, 其激光电场变为χ1ωm ∆ϕ1其中 为相位调制器的调制系数, 和信号源供给电压与调制器的半波电压之比相关; 为调制信号的角频率; 是信号源的相位, 这个相位可以通过图中所示的移相器改变. 将(2)式根据贝塞尔级数进行展开, 得其中a 表示贝塞尔级数的阶数, 同时也是电光调制光频梳梳齿的阶数. 将(1)式代入, 并进一步整理为傅里叶级数的形式, 得再对其进行傅里叶变换, 每阶梳齿的功率就可以表示为可以看出, 每阶梳齿的功率与调制系数和调制信号的相位有关, 如果调整输入信号的电压或者调节移相器, 可以改变各阶信号的功率. 但是根据贝塞尔函数的性质, 阶数越高, 梳齿的强度值越弱, 所以经过单个相位调制器生成的梳齿数量是有限的. 如果要增加生成的梳齿数量, 可以通过级联多个电光调制器. 种子光源经过3个级联的相位调制器后,输出的光信号在频域上可以表示为χ2χ3∆ϕ2∆ϕ3其中b 和c 代表光频梳梳齿的阶数, 和 分别表示第二和第三个电光调制器的调制系数, 和分别表示输入到第二和第三个电光调制器的微波信号的相位. 可以看到, 级联多个电光调制器后, 光谱形状的调节自由度更高, 可以通过分别调配输入到每个电光调制器上的微波信号的功率和相位, 来使高阶的梳齿也具有相对较高的功率, 进而使得光谱顶部更加平坦.经过多个相位调制器的级联, 具有多根梳齿的光频梳生成了, 但经电光调制器调制出的边带(梳齿)数量毕竟有限, 致使此时光频梳光谱宽度比较窄, 不利于光谱干涉测距方法的应用, 所以需要对输出的电光调制光频梳光谱进行扩展. 光谱扩展的第一步是进行色散补偿, 实验证明, 电光调制器与单模光纤的色散系数是相反的[24], 所以可以将电光调制光频梳的输出信号接入单模光纤进行色散补偿.色散补偿后每根梳齿的线宽都将得到收缩,进而这些梳齿的峰值功率会升高, 在光纤中传播时会由于四波混频等非线性效应产生新的频率成分.但单模光纤的非线性效应比较微弱, 产生的新频率成分数量较少且功率较低. 为了有效进行光谱扩展, 就需要使用高非线性光纤, 并且在高非线性光纤之前最好先使用光功率放大器来进一步放大峰值功率. 通过使用上述非线性扩谱技术, 光频梳光谱宽度一般可被扩展数倍以上. 另外还值得注意的是, 电光调制光频梳光源内的大部分时候光都不是脉冲形式. 在光源的前半段, 光的时域形式只是有着多个频率成分的连续波激光, 只在扩谱模块的光纤内最后一部分才可能产生脉冲.控制器图 1 电光调制光频梳生成示意图 (PS: 移相器)Fig. 1. Schematic setup of the electro-optic (EO) comb generation (PS, phase shifter).3 光频梳光谱干涉理论分析3.1 光谱干涉测距原理E (t )E ref (t )=αE (t )E meas (t )=βE (t −τ)αβτ据前文所述, 光谱干涉现象产生的物理原因是光谱内的各阶频率成分的光进入干涉仪发生干涉,不同频率的光在相同距离下相位变化不一样, 干涉后的强度也不一样, 组合起来就有了光谱干涉条纹. 光谱干涉测距装置使用迈克耳孙干涉仪, 光频梳 被分为参考臂 和测量臂两部分, 其中 和 分别表示参考臂和测量臂的分光比, 表示光在测量臂往返运行的时间. 在这个时间内, 光的相位变化为νω其中 和 分别代表光的频率和角频率. 通过傅里叶变换, 在频域内, 参考光和测量光可以分别表示为及将参考臂和测量臂合束后送入光谱仪内, 两路光会在光谱仪的传感器上发生干涉, 干涉信号可以表示为(α2+β2)E 2(ω)2αβE 2(ω)cos (τω)τ从(10)式可以看到, 干涉后的信号包含一个强度为 的直流分量和信号表达式为的交流分量. 直流分量的强度是固定的, 且不带有距离信息, 可以不去解算. 而交流信号被信号光的运行时间 调制了. 对(10)式做傅里叶变换, 可将光谱干涉信号转换到伪时域中, 得±ττ在伪时域中,的位置会各出现一个脉冲, 解算出脉冲峰值点对应的横坐标, 就可求出光在测量臂的传输时间 .在传统的激光测距系统中, 解算出激光传播时间后将其乘以传输介质里的光速就可以直接得出待测距离. 但光频梳的重复频率一般较高, 所以测距时还需考虑“非模糊范围”的问题. 因为光频梳在时域上是等间隔的脉冲周期, 相邻脉冲之间的空间距离为n g f rep L pp f rep f rep f rep /2其中c 表示真空中的光速, 为光传播介质(此时指的是空气)的群折射率, 为光频梳的重复频率. 如果脉冲在空间中传播的距离大于, 就意味着这个脉冲进入到了下一个周期中, 这会导致测距结果出现歧义. 另一方面, 在频域的包络信号解调时, 因为光频梳的光谱是由一根根离散分布间隔为 的梳齿组成的, 所以无论光谱仪对光谱的采样率有多高, 光频梳对光谱包络信号的采样率只有. 根据奈奎斯特采样定律, 超出 的调制频率就无法解调出来, 所以解调出来的测量光传输时间L pp /2L pp /2L pp /2即最多解调出光在 内往返的时间, 如果待测距离超过 , 就需要预先知道被测距离是在几个 内, 待测距离可以表示为其中k 为自然数, 代表已知的周期数.3.2 光谱干涉测距非模糊范围及精度理论分析L pp f rep [−1/2f rep ,1/2f rep ]在上一节提到, 光谱干涉测距的非模糊范围与光频梳相邻脉冲的间距( )有关, 同时也与光谱仪的采样率密切相关. 如上一节所述, 光频梳的梳齿对光谱干涉调制包络的采样率就等于光频梳的重复频率, 即 . 依据傅里叶变换性质, 将包络信息转换成伪时域后时间范围为 ,最大可测的无歧义距离为L pp /4从另一个角度分析, 解调出的距离是测量脉冲和离他最近的参考脉冲的光程差, 所以在测量脉冲位于相邻参考脉冲的正中间的时, 可以得到最大可测量值, 即 . 当脉冲远离这个位置后, 实测的距离值开始下降, 显示如图2中纵坐标所示.f s f s >f rep 上述分析是建立在光谱仪分辨力足够高, 以至于能采集到光频梳的每根梳齿的基础上. 事实上,常规的商用光谱仪波长分辨力为十皮米量级, 而常见的超快激光器主要工作在中近红外波段, 他们的重频一般在数十兆赫兹至数百兆赫兹量级, 在这个分辨力下很难采到光频梳的梳齿. 在此情况下, 限制非模糊范围的因素就是光谱仪的频率分辨力(也是光谱仪的最高频率采样率). 假设光谱仪可分辨的最小频率间隔为 , 且 , 此时由光谱仪分辨力决定的最大可测的无歧义距离为L NAR-OSA <L pp /4L NAR-OSA f s ⩽f rep L pp /4L ′NAR-OSA L pp /4f s >f rep L NAR-OSA f s ⩽f rep L pp /4此时 , 非模糊范围就是 ,那么图2中所示红色部分的距离信息就测不出来了, 也就是说在这种情况下存在测距“死区”. 但如果光谱仪频率分辨力足够高, , 那么由光谱仪频率分辨力决定的理论测距结果不低于 ,如图中 , 那么非模糊范围仍然是 , 此时理论上就不存在测距“死区”. 总结来说, 当时, 非模糊范围为 , 存在测距“死区”; 而当 时, 非模糊范围为 , 不存在测距“死区”.根据傅里叶变换的性质, 变换后横坐标的分辨力(即时间分辨力)等于采样率与采样点数的商,可以表述为t s N s 其中 表示采样率, 表示采样点数. 在光谱宽度一定的情况下, 采样率和采样点数的商也是定值.假设光频梳的中心波长为1550 nm, 光谱仪的波长采样率为x nm, 暂不考虑介质折射率, 那么在光频梳中心频率周围光谱仪的频率采样率为又因为光谱仪的采样率要远小于光频梳的中心频率, 则有此时, 光谱仪的时间采样率为再假设光频梳的光谱宽度为M nm, 那么采样点数则时间分辨力为那么距离分辨力为从(23)式可以看出, 在当前的光谱干涉距离解算方法中, 光频梳的光谱宽度是测距分辨力的惟一影响因素. 不过, 分辨力实际上影响的是傅里叶变换后伪时域里采样点的间隔, 如果系统分辨力低, 则意味着伪时域中脉冲上采样点稀少. 如果只取脉冲最高位置附近采样点作为测量结果必然会造成明显的测距误差. 但如果先对脉冲做一个波形拟合再取拟合后的顶点, 那么测量精度就有机会得到明显改善.f 15f 14f 1除了分辨力之外, 光谱干涉的测距精度还要受光谱仪采样方式的影响, 光谱仪的采样是按照等波长间隔采样的, 而我们使用的傅里叶变换等数据处理算法是根据等频率间隔采样来计算的. 光的波长与频率并不是线性的, 所以如果直接对光谱仪采样结果做傅里叶变换分析就会引入采样误差. 为了解决这个问题, 我们课题组提出过一种对光谱仪采样结果进行等频率间隔重采样的方法[26]. 图3表述了光谱仪采样及等频率间隔重采样的过程. 在光谱仪等波长间隔重采样的情况下, 采集到的光谱干涉条纹不是恒定周期的信号, 如图3(a)所示; 直接将图3(a)的横坐标换算成频率的话, 换算出的频率值 , , ···, 不是等间隔排列的, 如图3(b)所示. 需要注意的是, 波长和频率是负相关的, 所以图3(b)中的波形和图3(a)是镜像对称的; 接着将横坐标进行线性排列, 干涉条纹的波形就变成了标准的正弦形式, 如图3(c)所示; 最后对图3(c)里的正弦波形进行等频率间隔重采样, 如图3(d)所示. 此时, 对重新采集到的信号数列做傅里叶变换处理, 就可以得到不失真的测距结果.pp NAR - NAR -待测距离图 2 光谱干涉测距非模糊范围理论示意图Fig. 2. Schematic diagram of the non-ambiguous range of spectral interference ranging.f s 根据前文针对光谱干涉测距方法的非模糊范围和测距精度问题做的理论分析, 对应到现有的商用光谱仪来讨论, 常用的光谱仪其波长采样率最高在皮米或数十皮米量级, 那么在1550 nm 波长附近对应频率采样率 在108—109 Hz 量级. 如果需要光谱干涉装置工作在无“死区”状态下, 使用的光频梳的重复频率至少要高于108—109 Hz 量级. 考虑到在工程实际中, 采样率一般要求达到被测信号频率的5倍以上, 则实际使用光频梳的重复频率就需要达到109 Hz 乃至1010 Hz 量级, 才可进行无“死区”测距. 对应到现有的基于锁模激光器的商用光频梳来说, 光纤锁模激光器的腔体内需要一段增益光纤, 其重复频率最高只能达到108 Hz 量级; 而固体激光器可以使用短腔长将重复频率升至GHz 量级, 但现阶段制作高重频的固态激光器价格较高, 市场上大多数商用锁模激光器的重复频率还都在107—108 Hz 量级. 然而, 使用电光调制光频梳就没有这个问题. 受益于电子工业的发展, 电光器件的输入电信号大多可以在kHz 到GHz 量级任意调制, 很多商用电光调制器的最高工作频率能达到10 GHz 以上, 以这些电光调制器为基础制作的光学频率梳就可以具有足够高的重复频率来实现无“死区”的光谱干涉测距.另外, 根据前文的分析, 光谱宽度决定了光谱干涉测距的分辨力, 越宽的光谱就会有越高的分辨力. 电光调制光频梳的宽度是由级联调制器的个数、电光调制器的输入功率与非线性扩谱的结果来共同决定的. 虽然决定因素较多, 但总体来说, 电光调制光频梳的光谱宽度与光频梳制作的成本是正相关的. 然而, 即使刚开始通过傅里叶计算得到的系统分辨力不高, 我们仍有机会通过脉冲波形拟合等办法来提高测距精度[26]. 所以在具体的实验设计中需要平衡考虑成本与精度, 以设计出更符合应用需要的测距仪器.4 光谱干涉测距实验装置及结果4.1 光谱干涉测距实验光谱干涉测距装置见图4, 其包括光源部分和测距部分两大模块. 光源部分的核心是三只级联的电光相位调制器(EOspace PM-5SE-10-SRF2W),电光调制器将种子光源(RIO ORION, 中心波长1543.7 nm, 输出功率7 mW)调制出多个边带, 形成光学频率梳. 电光调制器的调制电压由一个定制的微波信号源(湖南全波段 MW1956H, 10 GHz 输出频率)经移相器(北京谷波 GDL22-T50)输入, 通过调整移相器的输出相位或者改变信号源的输出功率来改变输出光频梳梳齿的数量和梳齿的功率分布. 为了保证光频梳重复频率的稳定性, 定制的信号源直接以铷原子钟(SRS FS725)的输出信号作为频率基准源, 以实现光频梳重复频率对原子钟频率的溯源.强度1 2 3 4 5 6 7 8 9 10 11 12 13 14 15波长强度15 14 13 12 11 10 9 8 7 6 5 4 3 2 1频率频率强度1 2 3 4 5 6 7 8 9 10 11 12 13 14 1频率图 3 等频率间隔重采样处理示意图 (a)光谱仪等波长间隔采样得到的信号; (b)对横坐标进行波长-频率变换后的信号; (c)对横坐标进行线性坐标转换后的信号; (d)对转换后的信号进行等频率间隔重采样的结果Fig. 3. Schematic diagram of equal frequency interval resampling: (a) Signal obtained by spectrometer with equal wavelength inter-val sampling; (b) the signal after wavelength-frequency transformed; (c) the signal after linear coordinate transformation on the ab-scissa; (d) the signal after equal frequency interval resampling.种子源经过级联的电光调制器后输出的信号如图5(a)所示, 此时, 超过40根功率较高且相对平坦的梳齿被调制出来. 输出的光频梳以种子光源的频率(1543.7 nm)为中心频率, 以微波调制频率(10 GHz)为重复频率对称分布, 高功率梳齿所在的光谱宽度约为4 nm. 接下来, 对初步生成的光频梳进行光谱扩展, 使用的单模光纤(Corning G.652)长度为2.4 km, 该型光纤在1550 nm 波长附近的色散系数约为18 (ps/nm)·km. 单模光纤输出的光先进入掺铒光纤放大器(erbium doped fiber amplifier, EDFA, 上海瀚宇 MARS), EDFA 将总功率提升到840 mW 再进入到高非线性光纤.实验中使用的高非线性光纤(OFS HNLF Zero-Slope)长为850 m, 非线性系数约为10.8 W –1·km –1,扩谱后的光谱全宽接近30 nm, 如图5(b)所示. 实验中发现, 光谱宽度与高非线性光纤的长度直接相关, 更长的光纤可以获得更宽的光谱, 但也要EDFA 有足够的输出功率来支撑. 可以看到, 扩展后的光谱呈现中间高, 两边低的形态, 尤其是初始光谱所在的波段功率特别高, 相比扩谱产生的新频率成分的功率高出10 dB 以上, 换算成线性坐标就是将近10倍, 这将严重影响光谱包络信号的识别与提取. 为了使输出光谱相对平坦, 定制了一个基于啁啾光纤光栅的带阻滤波器, 其阻带中心频率为1543 nm, 在4.8 nm 的带宽内光反射率达到了92.5%, 其余波长几乎无衰减, 经过带阻滤波器后的光频梳光谱如图5(c)所示. 但因为主要功率都集中在滤波器的阻带上, 经滤波器后的输出光功率将明显衰减. 另外可以看到, 经过高非线性光纤的光谱长波部分比短波部分的基底功率要高. 在图5(c)中没有采集到的长波方向, 与主光谱间隔约100 nm 的波段也有一些频率成分, 但功率相对较低. 所以光源内或许存在一些受激拉曼散射效应, 但该效应不影响测距, 且拉曼效应的光谱不与主光谱连接, 不方便处理干涉条纹, 所以本系统不对其进行采集.理论上说, 电光效应和非线性效应都会受光的偏振态和相位的影响, 所以光源内的偏振扰动和相位变化会对光谱的稳定性尤其是光谱的宽度产生影响. 在级联电光调制器部分, 在种子光源和电光调制器之间加了偏振控制器, 电光调制器之间使用保偏光纤连接, 并在每个电光调制器和信号源之间都加了移相器, 这样可以方便偏振态和相位的调控和维护. 在光谱扩展部分, 由于使用了很长的单模光纤, 偏振扰动不可避免, 不过我们使用的EDFA 有自动功率控制的功能, 使其可以满足无论输入光功率和偏振态有何变化, 它都能输出固定功率, 而且输出光的偏振态也基本是固定的.所以在这一部件上完成了对偏振变化的“免疫”, 所以没有在这部分使用偏振控制器. 然而, 调节相位调制器前端的移相器仍然能改变进入到高非线性光纤的光的相位, 这样可以通过调节移相器来完成相位匹配, 以达到更好的非线性扩谱效果.BS1铷钟靶镜目标导轨图 4 电光调制光频梳光谱干涉测距结构图(BS, 分光棱镜; EDFA, 掺铒光纤放大器)Fig. 4. Experimental setup of EO comb dispersion interferometry (BS, beam splitter; EDFA, erbium doped fiber amplifier).。
一种改进的逐差法数据处理方法
一种改进的逐差法数据处理方法
朱正华
【期刊名称】《湖南大学学报(自然科学版)》
【年(卷),期】1999(026)001
【摘要】在物理实验或测量实践中,经常碰到一类通过自变量等间隔变化来获取测量数据的问题,基于简单算术平均法及通常的逐差法处理这类问题不能得到合理的结果,在充分利用原始测量数据的基础上,运用最小二乘原理推导出了合理的相关量的平均值计算公式,并最后得到了较为简洁的结果.
【总页数】3页(P13-15)
【作者】朱正华
【作者单位】湖南大学应用物理系,中国,长沙,410082
【正文语种】中文
【中图分类】O4
【相关文献】
1.一种改进的地形数据处理方法及系统 [J], 冯桂;卢容德
2.有信息丢失样本的一种数据处理方法:改进残存比率法 [J], 施泽康
3.逐差法求加速度的改进 [J], 高国进!361022
4.光频梳频域干涉测距主要参数分析及一种改进的数据处理方法 [J], 陈嘉伟; 王金栋; 曲兴华; 张福民
5.基于改进模糊K-means算法的大数据处理方法 [J], 王天皓
因版权原因,仅展示原文概要,查看原文内容请购买。
可调谐激光扫频干涉测量研究
可调谐激光扫频干涉测量研究
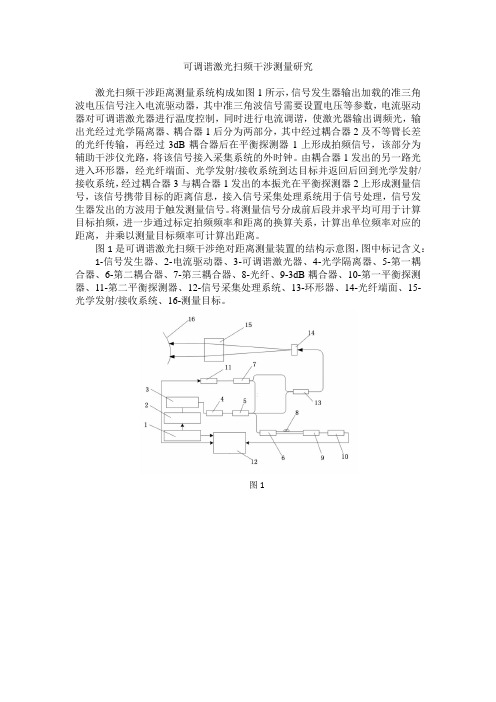
激光扫频干涉距离测量系统构成如图1所示,信号发生器输出加载的准三角波电压信号注入电流驱动器,其中准三角波信号需要设置电压等参数,电流驱动器对可调谐激光器进行温度控制,同时进行电流调谐,使激光器输出调频光,输出光经过光学隔离器、耦合器1后分为两部分,其中经过耦合器2及不等臂长差的光纤传输,再经过3dB耦合器后在平衡探测器1上形成拍频信号,该部分为辅助干涉仪光路,将该信号接入采集系统的外时钟。
由耦合器1发出的另一路光进入环形器,经光纤端面、光学发射/接收系统到达目标并返回后回到光学发射/接收系统,经过耦合器3与耦合器1发出的本振光在平衡探测器2上形成测量信号,该信号携带目标的距离信息,接入信号采集处理系统用于信号处理,信号发生器发出的方波用于触发测量信号。
将测量信号分成前后段并求平均可用于计算目标拍频,进一步通过标定拍频频率和距离的换算关系,计算出单位频率对应的距离,并乘以测量目标频率可计算出距离。
图1是可调谐激光扫频干涉绝对距离测量装置的结构示意图,图中标记含义:1-信号发生器、2-电流驱动器、3-可调谐激光器、4-光学隔离器、5-第一耦合器、6-第二耦合器、7-第三耦合器、8-光纤、9-3dB耦合器、10-第一平衡探测器、11-第二平衡探测器、12-信号采集处理系统、13-环形器、14-光纤端面、15-光学发射/接收系统、16-测量目标。
图1。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
光频梳频域干涉测距主要参数分析及一种改进的数据处理方法陈嘉伟; 王金栋; 曲兴华; 张福民【期刊名称】《《物理学报》》【年(卷),期】2019(068)019【总页数】11页(P33-43)【关键词】光学频率梳; 频域干涉; 光谱干涉; 绝对距离测量【作者】陈嘉伟; 王金栋; 曲兴华; 张福民【作者单位】天津大学精密测试技术及仪器国家重点实验室天津 300072【正文语种】中文1 引言高精度绝对测距在当今科研、航空、工业生产等领域扮演着重要的角色, 现代工艺的不断发展也使得人们一直在追求微米甚至纳米级的绝对测距精度[1−18].飞秒激光光学频率梳的出现为解决这一问题开辟了崭新思路, 相关概念最早由Hänsch在1978年提出[5], 其独特的梳状光谱结构形成等间距分立的频率, 溯源至铷原子钟等基准源后可以使重复频率frep和偏移频率fCEO实现与外部频率源一致的稳定度(铷原子频率稳定度可达10–11—10–12),若将光梳对应梳齿偏频锁定到超窄线宽高稳定的激光, 秒级稳定度能达到10–15,形成频率锁定的超稳光源[4,8,19,20], 并在高精度绝对测距方面有重要应用[20,21].2000年, Minoshima 和Matsumoto[6]首次采用锁模飞秒激光实现了240 m大长度距离测量,其精度为 8µm/m.此后, 飞行时间法[17,18]、合成波长法[7,12]和频域干涉法[9,13]等利用光频梳高相干性、频率稳定性的测距方案被相继提出.2006年,Joo与Kim等[9,10]提出通过光谱频域干涉实现绝对测距的方案, 并在0.89 m测量范围内取得了1.46 mm 非模糊范围和 7 nm 的分辨力.2011年,Cui等 [13,14]结合 Joo 和 Ye的方法, 进行了 50 m范围大长度测距, 以测量微小位移代替光谱仪校准, 达到1.5 µm 的测量精度, 再次证明了此方案在长距离测量中的可行性.现有光谱频域干涉测距算法有基于傅里叶变换法的峰值间隔法、相位斜率法和基于两种原理的结合方案等.峰值间隔法原理简单速度快, 以变化后的峰值位置确定叠加频率, 但在信噪比低或频率过低时, 频谱因混叠而寻峰困难, 且FFT分辨力受点数限制导致数据重复.相位斜率法首先通过窗函数选定被测频率, 再利用逆傅里叶变换解相位卷裹求得频率, 有较高分辨力, 但滤波器的参数对结果有影响[15].同时, 由于光谱仪是等波长间隔采样,直接处理光谱数据会导致累积性的系统误差.2014年, 安慰宁等[15]结合复小波理论改进了相位斜率法, 对色散等问题进行了一定修正, 在近距离范围内取得较好的结果, 但距离较大时仍存在脉冲展宽问题, 其高精度测量范围仅能在较小光程差内.2015年, 吴翰钟等[16]对频域干涉测距进行了模拟, 对相关参数进行了理论分析, 但未提及光谱仪等波长间隔采样的问题.为了解决上述问题, 本文对光频梳频域干涉测距的重要参数的影响因素、原理和现有问题进行了定性分析和推导, 根据分析结果, 提出了一种基于三次样条插值的光谱重构算法, 该算法可增加干涉结果的信噪比, 修正传统FFT算法系统误差.为提升系统分辨力, 在上述算法基础上进一步提出了峰值拟合算法, 可将测距拓展至整个非模糊范围,减小了系统误差并显著提升系统分辨力.因算法复杂度低, 可用于后续实验高速测量的实时修正和即时显示.最后对上述算法进行了仿真和实验验证.2 光频梳频域干涉测距原理光学频率梳在频域上可以提供一系列分立的偏移频率为fCEO, 频率间隔为frep的频率纵模[11],如图1所示.图1 光频梳频谱Fig.1.Spectrum of optical frequency comb.时域上表现为一系列等间隔的飞秒级脉冲序列, 时间间隔 TR=1/frep , 群速度和相速度差异产生的载波包络相位偏移∆ φce=2πfCEO/frep.由于光频梳具有相位锁定特性, 相邻脉冲间的相位关系固定, 使不同脉冲之间可以相互干涉[16].频域干涉法又叫光谱干涉法或色散干涉法, 测量系统结构为经典Michelson干涉仪[11,19], 如图2(a)所示.其中参考镜Ref固定, 测量镜Target可前后移动以改变光程差2L, 光频梳发出的脉冲经分束镜BS分束后被分别反射并产生时间差t, 再次汇聚于BS时在频域内发生干涉, 光谱仪接收干涉信号并输出结果.受分光比、光路准直等因素的影响, 参考脉冲Eref(υ)和测量脉冲Et(υ) 的功率难以保证严格相等,表现为电场信号强度不一致, 可分别表示为:(1)式中, a 和 b 为对应功率因数, 理想情况下 a=b且均小于1, 实际受环境等因素影响而通常不相等, 造成干涉信号I (υ) 调制深度变化:由(2)式可见直流项功率因数为 a 2+b2 , 载波信号功率因数为 2 ab , 调制深度为 2 ab/a2+b2 , 又有|cos(2πτυ)| 1, 仅当调制深度最大, 即 a= b 时,干涉条纹振荡幅度最强, 由于空间光路的衰减效应和准直等问题, 系数b受距离影响较大, 表现为载波振荡幅度随L增大逐渐减小, 需及时通过衰减器调整调制深度, 避免影响信噪比.I (t) 经FFT变换后的结果为由 (3)式可知, 变换到伪时域的 I (t) 将会出现δ(t− τ)和δ (t+ τ) 两冲激函数, 其中τ 即为对应振荡频率, 即∆t=fac[I(v)]=τ , L 和 t 有简单对应关系, 即L=c∆t/2n=cτ/2n , n 为折射率, c 为光速, 对L测量等价于对t的计算.3 主要参数分析本节对频域干涉中的测量范围、距离分辨力∆L、非模糊范围 LNAR 的影响因素及使用原始光谱数据造成的系统误差进行分析.图2 (a)频域干涉法原理图; (b) 测距系统实物图Fig.2.(a) Principle of frequency domain interference method; (b) the experimental setup of the measurement system.3.1 测量距离上下限频域干涉测距依靠频谱干涉数据, 时域上的脉冲是否重合不影响测量, 根据相干长度计算公式Lc=c/n∂f , ∂f 为频率梳的梳齿线宽, 光纤光频梳自然线宽约为几十kHz, 基于固体钛宝石光梳在kHz左右, 而锁定到超稳激光上的窄线宽光梳的线宽能达到1 Hz左右, 在相干距离内该方法仅受光强与调制深度影响, 其测距上限在真空等干扰较小的环境可达数十公里.测距下限由干涉信号伪时域混叠程度决定,当L较小导致时延∆t低于阈值τ0 时, 将因混叠导致难以测量, 此时Lmin=cτ0/2n.3.2 分辨力的影响因素峰值间隔法或相位斜率法均涉及FFT变换,其分辨力受多个条件的直接影响.假设干涉结果采样为等频率间隔, 其频谱范围 W 和频谱宽度 B 可以表示为其中, ∆ w 为波长范围之差, λcen 为中心波长.频率分辨力∆ υ 、采样频率 fs 和采样点数N可分别表示为:(5)式中, ∆ λ 为波长采样间隔, 得出 FFT 变换的距离分辨力∆ L 为(6) 式参数均为已知光谱的参量.由此可见, ∆ L 仅与 W 有关, 改变 N, fs 等不影响∆ L.设定分析范围为 W= 1500—1600 nm, ∆ λ=0.02nm , λcen=1560 nm, 对应N= 5000, 代入可得∆ L 约为12 µm.由以上推导可知傅里叶变换法分辨力仅受光频梳频谱宽度影响.3.3 非模糊范围的影响因素频域干涉法的非模糊范围 LNAR 与光谱仪的频率分辨力 df 和光频梳光谱参数均有关, 理想情况下 LNAR0 仅与 frep 有关:由(3)式可将干涉信号I (υ) 简要表示为由于τ 受L影响, 通常在L较大时τ 远大于光谱仪的 d f 而进入死区, d f 与波长微分量d λ 的关系为:fs与采样间隔互为倒数关系, 结合 Nyquist定律, t 值域为 [ 0,1/2df] , 因此LNAR1 满足:由 (10) 式可知, LNAR1 仅与dλ 和λ 相关, 代入计算可得 LNAR1<28mm ; 另外, 由于反射镜使光路往返, L的计算还应再乘1/2以获得绝对距离.提升 LNAR 可采用两种方式:可使用更大波长分辨力的光谱仪, 或是采用高 frep 的光频梳, 如国内可实现 frep=40GHz 及以上的片上微谐振腔光梳[1,22],其梳齿密度低, 时域上相邻脉冲间距可达7.5 mm,可得 frep 与 LNAR 关系, 如图3 所示.图3 实测距离与被测距离关系Fig.3.Relationship between actual distance and measured distance.易知LNAR2<LNAR1≪LNAR0, 高 frep 光频梳作为光源时, L未达到 LNAR1 极限即进入下个非模糊范围, 避免光谱仪 df 影响进入死区, 且无需移动位移台、变化参考光路等, 使用高 frep 的光频梳的频域干涉法有大长度任意绝对距离测量的前景.3.4 采样方式的影响本节将分析因采样原理而造成的系统误差.光谱仪采样方式有两种:等频率间隔∆ f 采样和等波长间隔∆ λ 采样, 绝大部分采样方式为后者.数据处理时波长需转化为频率量, ∆ f 在时域内遵从(11)式:其中λ1 为对应波长, 由 (11) 式可知, ∆ f 由λ1 决定, 且为非线性关系.由 (4)—(6)式知, f不等间隔范围受B影响相应变化, 又因为FFT变换基于点运算, 仅适用于等间隔数据, 处理不等∆ f 数据必然造成系统误差.由图4 可知, 当忽略∆ f 变化直接计算, 尖峰包络随τ 增大而展宽, τ 较小时展宽尚不明显, τ 较大时∆ f 相应增大, 经FFT处理时因非线性造成误差累积, 形成随L变化且难以补偿的展宽, 导致测量值漂移、信噪比下降而影响计算.传统FFT法和相位斜率法均应用FFT变换先行处理, 其处理的准确与否直接影响后续τ 的提取:前者需定位变换后峰值所在位置, 展宽使得尖峰形状接近原始光谱, 导致信噪比急剧下降、环境干扰更加重, 影响定位精度.后者同样受此影响,窗函数参数对滤波效果影响较大[15], 难以控制系统误差.综上, 基于FFT变换的相关算法若要解决累积性系统误差, 必须考虑采样方式对原始光谱数据的影响.4 等频率间隔重采样和峰值位置拟合算法图4 传统 FFT 法脉冲包络展宽现象(a) τ=3.3×10−12 ; (b)τ=7.5×10−11Fig.4.Broadening of the pulse envelope using original FFT:(a) τ=3.3×10−12 ; (b) τ=7.5×10−11.图5 等频率间隔重采样原理Fig.5.Principle of equal frequency interval resampling.本节针对上文提到的分辨力问题和频率不等间隔问题, 提出了基于等频率间隔重采样法和峰值位置拟合的改进算法, 该算法修正了脉冲包络展宽的系统误差, 将测距范围拓展至整个非模糊范围,并大幅提高系统分辨力, 解决数据重复和跳变的问题.4.1 等频率间隔重采样法对于因光谱仪采样方式造成的问题, 提出了一种获得等∆ f 数据的算法.等频率间隔重采样基于三次样条插值 (cubic spline interpolation), 是利用函数连续且一、二阶均连续可导的特性进行的插值, 已知叠加高频信号为固定频率余弦函数, 此前提与(8)式符合.其原理如图5所示.以等∆ λ 采样值作为原始数据, 使用三次样条插值进行光谱重构, 默认非扭结边界条件, 再通过等∆ f 点横轴反向寻找重构函数对应值, 完成重采样并获得等∆ f 光谱数据, 使解算更接近FFT变换原始定义, 减少原理问题导致的系统误差.4.2 峰值位置拟合算法基于傅里叶变换的算法均受分辨力影响, 数据重复原因在于∆ L 大于L变化量, 即传统FFT法仅能测量整数倍∆ L , 位置位于两∆ L 之间将使结果就近显示, 导致τ 值重复或无规律跳变, 如图6所示.图6 传统 FFT 法结果重复和跳变Fig.6.Repetition and hopping of the measurement result.经上述处理后分辨力问题仍存在, 故误差将呈现周期性变化, 峰值附近靠近τ 形成多段折线, 如图7(a)所示, 仿真频率τ=3×10−11 , 经重采样修正的脉冲峰值与真实值仍有一定偏差.结合上文等频率间隔重采样法, 本段提出峰值位置拟合法:结合峰值点与相邻点的微小斜率变化, 对尖峰进行二项式拟合以减小周期性误差并提高系统分辨力.二项式拟合基于最小二乘法, 得最小残差平方和的二次函数, 其形式如下:式中 p1 , p2 , p3 对应函数的二、一次项和常数项,采用峰值点和相邻两点这三个数据点进行二项式拟合以提取峰值附近点斜率信息, 并减小数据冗余影响, 以对称轴横坐标为修正值.其修正效果如图7(b), 峰值位置拟合使分辨力提升, 拓展测量范围并减小周期性出现的系统误差.图7 当t= 3 × 10–11 时, 仿真效果对比 (a) 等频率间隔重采样; (b) 峰值位置拟合parison of simulation effect when t= 3 × 10–11:(a) Equal frequency interval resampling; (b) peak position fitting.实际上, 也可采用三次多项式、高斯函数拟合等更复杂的拟合, 但在仿真及后续实验的误差修正效果与二项式拟合相比差异不大, 故采用在处理不同采样分辨力、数据量的原始数据时均性能良好的二项式拟合法.4.3 数值模拟及分析仿真采用 W= 1500—1600 nm, ∆ λ=0.02 nm的 s ech2 函数作为模拟光谱包络, 叠加高频余弦仿真信号, 2ab= 0.4, 频率分别为τ=3.335×10−12 ,3.335×10−11, 7.500×10−11 ; 对应 2L= 1.005,10.05, 22.5 mm, 如图8 所示.由图8看出, 直接使用等∆ λ 数据进行FFT运算, 会造成因τ 变化导致的波形展宽, 而等频率间隔重采样法则没有明显的展宽, 其脉宽基本不受L影响, 对比结果见表1. 由表1可见, 等频率间隔重采样和峰值位置拟合的误差远小于传统FFT法, 误差基本不随L变化, 而传统FFT法由于频率非线性导致累积误差逐渐增大, 也是许多基于FFT法测距方案仅可测量较小L原因.图8 峰值定位仿真传统FFT (a) 3.335 × 10–12, (b) 3.335 × 10–11, (c) 7.500 × 10–11; 等频率间隔重采样和峰值位置拟合(d)3.335 × 10–12, (e) 3.335 × 10–11, (f) 7.500 × 10–11Fig.8.Peak position fitting simulation.Original FFT:(a) 3.335 × 10–12, (b) 3.335 × 10–11, (c) 7.500 × 10–11.Equal frequency intervalresampling and peak position fitting (d) 3.335 × 10–12, (e) 3.335 × 10–11, (f) 7.500 × 10–11.表1 传统FFT、等频率间隔重采样和峰值位置拟合法仿真结果误差比较Table 1.Simulation error comparison of three methods.实验序号 L/mm 传统FFT法误差/µm 等频率间隔重采样误差/µm 峰值拟合误差/µm 1 0.5250 9.1031 2.8944 0.161990 2 0.8250 21.1607 2.8344 0.165549 3 0.9000 24.1751 –0.17990.010804 4 1.0005 28.6943 –4.6991 –0.166222 5 1.2000 36.2327 –0.239 0.000102 6 1.5000 36.2927 –0.2999 –0.008146 7 1.9950 51.3887 –3.3983 –0.183495 8 3.0000 84.5830 –0.5998 –0.038114 9 4.9950 135.9718 –3.998 –0.177303 10 7.0050 190.3629 1.5986 0.114618由图9可知, 因峰值位置拟合改善分辨力而减小了误差, 在L全范围稳定了误差变化趋势.弥补了传统FFT变换引起的累积性系统误差无法补偿的缺陷, 使信号变换结果维持较窄脉宽, 扩展测量范围, 与理论分析一致.图9 传统FFT、等频率间隔重采样和峰值位置拟合法仿真误差比较Fig.9.Simulation error of three methods.5 实验验证及分析图2(b)为Michelson干涉测距的实物图, 光源使用 Onefive Origami-15 超快激光器, 输出frep=250MHz, 功率稳定于 50.3 mW, 输出脉宽 130 fs,经光纤光路后脉宽受色散影响展宽至ps级.具体程度与光纤光路长度相关, 因窄脉宽包含更多的频率纵模量, 展宽后的脉冲将损失少量频率, 表现为光谱有效分析范围减少.由增量干涉仪测得测量镜Target位移量并作为准确值, 检验相关算法改进效果.5.1 非模糊范围验证LNAR影响因素已由前文推导, W= 1510—1610 nm, ∆ λ=0.01nm , 通过分析波形展宽并将测量距离与干涉仪结果相对比, 验证等频率间隔重采样和峰值位置拟合法的误差修正和对测量范围的提升效果.图10 峰值定位效果对比仅传统 FFT (a) L= 5.8600 mm, (b) L= 16.9850 mm, (c) L= 27.9100 mm; 等频率间隔重采样和峰值位置拟合 (d) L= 5.8600 mm, (e) L= 16.9850 mm, (f) L= 27.9100 mmFig.10.Effect contrast of peak position fitting.Original FFT:(a) L= 5.8600 mm, (b) L= 16.9850 mm, (c) L= 27.9100 mm.Equal frequency interval resampling and peak position fitting:(d) L= 5.8600 mm, (e) L= 16.9850 mm, (f) L= 27.9100 mm.由图10(a)—(c)可知传统FFT法的误差累积明显, 超过 LNAR/2 时波形展宽已不能正常计算, 本算法有效修正了该问题, L较大时仍保持明显的窄脉冲.与干涉仪结果相比对以验证修正效果, 见表2.由图10(d)—(f)和表2可知, 等频率间隔重采样维持窄脉宽并显著降低寻峰难度, 峰值位置拟合在此基础上提升了系统分辨力, 在测量范围的任意位置稳定误差至3 µm以下并减小了因∆ L 导致的周期性误差.其中, 实验 1、2 相对位移小于∆ L , 传统 FFT 法得到结果一致, 故误差增大.另外, L 较大时的展宽使原方法已不能定位, 该算法仍可保持较小误差.5.2 分辨力及重复性验证前文分析得知傅里叶变换法受限于∆ L 而导致数据重复.仍使用上述光路, 改变L并测量, 与干涉仪测量值进行误差比对, 如图11所示.表2 传统FFT、等频率间隔重采样和峰值位置拟合法误差比较Table2.Measurement results of different distance.实验序号 L/mm 传统FFT法误差/µm 等频率间隔重采样误差/µm 峰值拟合误差/µm 1 0.0023 –2.3015 1.6570 0.0218 2 0.0037 –3.6001 3.0337 –0.7335 3 0.1000 3.2167 0.1031 0.8437 4 0.4997 –1.8309 0.4975 0.2267 5 0.9998 2.0097 1.0011 –0.9828 6 3.1307 –4.2793 3.1336 1.1003 7 4.9980 –13.2375 4.9995 –0.1739 8 6.2364 157.33006.2308 –1.9198 9 6.2511 无法定位 6.2551 –2.9791 10 9.3629 无法定位1.5705 –2.1087图11 传统 FFT、等频率间隔重采样和峰值位置拟合法分辨力修正效果对比 (a) 0.4997 mm; (b) 0.9998 mm; (c) 4.9980 mmFig.11.Correction of repetition result by three methods:(a) 0.4997 mm; (b) 0.9998 mm; (c) 4.9980 mm.图11(a)为 L= 0.4997 mm, 可明显看出传统FFT法所有结果重复, 重采样不改变原有分辨力, 仍有重复结果, 峰值位置拟合处理后分辨力提升, 误差减小至0.3 µm 以下.图11(b)为 L=4.998 mm, 存在重复和跳变, 拟合后误差由最大8 µm 减小至2 µm 以下.图11(c)为较远距离 L=4.9980 mm, 传统方法误差已达几十µm并仍有重复, 本方法误差仍小于2 µm.由上述实验结果可知, 等频率间隔重采样和位置拟合有效修正结果重复和跳变, 系统分辨力显著提升, 减小测量误差并将结果抖动减小至∆ L/10 以下, 将高精度测量范围由仅限近距离扩展至整个LNAR.本实验系统可能仍存在机械原因导致的系统误差, 进行误差补偿处理后可获得更高精度测量结果.6 结论本文详细分析了光频梳光谱范围、采样点数、采样率等对测量分辨力的影响, 指出测距分辨力仅受光梳频谱宽度影响.讨论了非模糊范围的影响因素, 提出了使用高分辨力光谱仪或高重频光频梳光源两种解决方案.分析了传统FFT方法的局限性,指出该方法对系统分辨力的限制.根据分析结果,本文提出一种基于等频率间隔重采样和峰值位置拟合的数据处理算法, 该算法可将测距拓展至整个非模糊范围, 并大幅提高系统分辨力.仿真结果表明此方法在被测距离接近死区极限时(7.5 mm),系统误差小于0.2 µm.我们搭建了Michelson干涉系统对所提出的方法进行实验验证, 结果表明该方法大大提高了系统的分辨力, 并将测量范围拓展至整个非模糊范围, 且在所有待测位置, 绝对误差均小于3 µm.本文提出的数据算法大幅提高了系统的测量范围、分辨力和测距精度, 让光频梳频域干涉测距仪的商业化、仪器化成为可能. 附录A附表 A1 文章参数表Table A1 Parameter list.images/BZ_47_1417_352_1484_386.pngimages/BZ_47_1425_416_1475_454. png光频梳偏移频率光频梳重复频率 images/BZ_47_1432_477_1469_510.png 光频梳脉冲时域间隔 images/BZ_47_1413_539_1488_573.png光频梳脉冲电场信号群、相速度差异造成的相位偏移images/BZ_47_1411_599_1490_637.pngimages/BZ_47_1400_662_1500_699. png参考光电场信号images/BZ_47_1411_724_1490_762.png测量光电场信号a参考光功率因数b光谱仪接收的频域干涉信号测量光功率因数images/BZ_47_1419_912_1482_949.pngimages/BZ_47_1361_974_1540_101 2.png调制深度images/BZ_47_1421_1037_1480_1074.pngimages/BZ_47_1967_1036_2030_ 1073.png测量臂和参考臂光程差/2经FFT变换后的Limages/BZ_47_1430_1164_1471_1193.png2L造成时间差t 干涉信号振荡频率t= L/c c真空光速n折射率 images/BZ_47_1432_1414_1469_1448.png相干长度 images/BZ_47_1430_1477_1471_1510.png相干长度公式中的频率带宽images/BZ_47_1425_1539_1475_1568.pngFFT变换的距离分辨力=images/BZ_47_2013_1599_2068_1629.png *c FFT变换的频率分辨力images/BZ_47_1423_1608_1477_1633.pngimages/BZ_47_1411_1664_1490_ 1698.png频域干涉法的非模糊范围f频率images/BZ_47_1432_1789_1469_1823.pngimages/BZ_47_1432_1850_1469_ 1880.png光谱仪频率分辨力波长范围上下限之差B频谱宽度光谱仪波长微分量W频谱范围images/BZ_47_1423_1975_1477_2005.pngimages/BZ_47_1421_2102_1480_ 2135.png光谱仪采样频率W的中心处波长images/BZ_47_1436_2164_1465_2198.pngimages/BZ_47_1425_2225_1475_ 2255.png光谱仪采样波长间隔N光谱仪采样点数images/BZ_47_1405_2356_1496_2389.pngimages/BZ_47_1602_2353_1822_ 2390.pngimages/BZ_47_1407_2414_1494_2448.png理想情况下非模糊范围光谱仪的非模糊范围images/BZ_47_1405_2481_1496_2514.png非模糊范围images/BZ_47_1697_2478_1893_2515.pngimages/BZ_47_1425_2539_1475_ 2573.png波长需转化为频率时的对应波长波长需转化为频率时的频率变化量images/BZ_47_1434_2602_1467_2635.pngimages/BZ_47_1415_2662_1486_ 2699.png二项式拟合公式images/BZ_47_1434_2736_1467_2761.png二项式拟合二次项二项式拟合一次项images/BZ_47_1434_2798_1467_2823.pngimages/BZ_47_1434_2860_1467_ 2885.png二项式拟合常数项参考文献【相关文献】[1]Trocha P, Karpov M, Ganin D, Pfeiffer M H P, Kordts A,Wolf S, Krockenberger J, Marin-Palomo P, Weimann C,Randel S, Freude W, Kippenberg T J, Koos C 2018 Science 359 887 [2]Zhang J T, Wu X J, Li Y, Wei H Y 2012 Acta Phys.Sin.61 100601 (in Chinese) [张继涛, 吴学健, 李岩, 尉昊赟 2012 物理学报 61 100601][3]Xing S J, Zhang F M, Cao S Y, Wang G W, Qu X H 2013 Acta Phys.Sin.62 170603 (in Chinese) [邢书剑, 张福民, 曹士英, 王高文, 曲兴华 2013 物理学报 62 170603][4]Wu X J, Li Y, Wei H Y, Zhang J T 2012 Laser Optoelectron.Prog.49 5 (in Chinese) [吴学健, 李岩, 尉昊赟, 张继涛 2012激光与光电子学进展 49 5][5]Eckstein J N, Ferguson A I, Hänsch T W 1978 Phys.Rev.Lett.40 847[6]Minoshima K, Matsumoto H 2000 Appl.Opt.39 5512[7]Minoshima K, Arai K, Inaba H 2011 Opt.Express 19 26095[8]Liu T Y, Zhang F M, Wu H Z, Li J S, Shi Y Q, Qu X H 2016 Acta Phys.Sin.65 020601 (in Chinese) [刘亭洋, 张福民, 吴翰钟, 李建双, 石永强, 曲兴华 2016 物理学报 65 020601][9]Joo K N, Kim S W 2006 Opt.Express 14 5954[10]Joo K N, Kim Y, Kim S W 2008 Opt.Express 16 19799[11]Zhou W H, Shi J K, Ji R Y, Li Y, Liu Y 2017 J.Sci.Instrum.38 1859 (in Chinese) [周维虎, 石俊凯, 纪荣祎, 黎尧,刘娅 2017 仪器仪表学报 38 1859][12]Yang R T, Florian P, Karl M H, Michael K, Tan J B, Harald B 2015 Meas.Sci.Technol.26 084001[13]Cui M, Zeitouny M G, Bhattacharya N, van den Berg S A,Urbach H P 2011 Opt.Express 19 6549[14]Cui M, Zeitouny M G, Bhattacharya N, van den Berg S A,Urbach H P, Braat J J M 2009 Opt.Lett.34 1982[15]An W N, Zhang F M, Wu H Z, Qu X H 2014 J.Sci.Instrum.35 2458 (in Chinese) [安慰宁, 张福民, 吴翰钟, 曲兴华 2014仪器仪表学报 35 2458][16]Wu H Z, Cao S Y, Zhang F M, Qu X H 2015 Acta Phys.Sin.64 020601 (in Chinese) [吴翰钟, 曹士英, 张福民, 曲兴华 2015物理学报 64 020601][17]Lee J, Kim Y J, Lee K, Lee S, Kim S W 2010 Nat.Photon.4 716[18]Ye J 2004 Opt.Lett.29 1153[19]Li Y 2017 J.Sci.Instrum.38 1841 (in Chinese) [李岩 2017仪器仪表学报 38 1841][20]Wang G C, Yan S H, Yang J, Lin C B, Yang D X, Zou P F 2013 Acta Phys.Sin.62 070601 (in Chinese) [王国超, 颜树华,杨俊, 林存宝, 杨东兴, 邹鹏飞 2013 物理学报 62 070601] [21]Zhu M H, Wu X J, Wei H Y, Zhang L Q, Zhang J T, Li Y 2013 Acta Phys.Sin.62 070702 (in Chinese) [朱敏昊, 吴学健,尉昊赟, 张丽琼, 张继涛, 李岩 2013 物理学报 62 070702] [22]Lu Z Z, Wang W Q, Zhang W F, Liu M L, Wang L R, Chu S T, Little B E, Zhao J G, Xie P, Wang X Y, Zhao W 2018 Opt.Mater.Express 8 2662。