伺服电机选型计算ls表格计算
伺服电机的选型计算方法
伺服电机的选型计算方法伺服电机是一种应用于自动控制系统中的电动机,它具有高精度、高速度、高可靠性和高动态性等特点,广泛应用于工业自动化领域。
在进行伺服电机选型计算时,需要考虑以下几个方面:1.负载特性分析:首先需要对负载进行特性分析,包括负载的惯性矩、负载力矩和负载转矩等参数的测量和计算。
负载特性分析是伺服电机选型计算的基础,它直接影响到电机输出的动力和转速。
2.动力需求计算:在进行伺服电机选型计算时,需要考虑到所需的动力大小。
动力大小与负载的力矩和转速有关,可以通过下式计算:动力大小=负载力矩×负载转速动力大小的计算可以参考负载特性分析中得到的参数。
3.转矩需求计算:转矩需求是指伺服电机在运行过程中所需的最大转矩。
转矩需求可以通过下式计算:转矩需求=负载转矩+惯性转矩负载转矩和惯性转矩可以通过负载特性分析中得到的参数进行计算。
4.速度需求计算:速度需求是指伺服电机在运行过程中所需的最大转速。
速度需求可以通过下式计算:速度需求=负载转速+加速度×加速时间负载转速是伺服电机在运行过程中所需的最大转速,加速度是伺服电机在加速阶段的加速度大小,加速时间是加速阶段的时间。
5.动态性能计算:伺服电机的动态性能是指其快速响应的能力,包括动态转矩响应和动态速度响应。
动态性能的计算需要考虑到转矩和速度的波动范围,以及加速度和减速度的大小。
6.选型参数计算:在进行伺服电机选型计算时,还需要考虑到电机的额定功率、额定转矩、额定转速、额定电压和额定电流等参数。
这些参数可以通过上述计算得到,也可以通过伺服电机的性能曲线和规格表进行查询。
总之,伺服电机的选型计算方法需要综合考虑负载特性、动力需求、转矩需求、速度需求和动态性能等方面的因素。
同时,还需要根据具体的应用场景和要求进行合理的选型。
伺服电机选型计算xls 表格计算

TMx0.8>TL
* 此值因各系列而异,请加以注 意。
⑦加减速 转矩的计 算
加减速转矩TA
0.5096 0.037
⑧瞬时最 大转矩、 有效转矩 的计算
必要的瞬时最大转矩为T1
有效转矩Trms为
T1=TA+TL T2=TL T3=TL-TA
0.0523 0.0156 -0.0211
0.029
⑨讨论 负载惯量JL 有效转矩Trms
1.528 N.M
3000
r/mi n
条件满足 条件满足
条件满足 条件满足
条件满足
kg.m2 >
初步
选择
定
R88M
-
U200
30(J
m=
根据
R88M
-
1.6E-02
U200 30的
额定转矩Tm=源自N.m1.23E-05
0.637
(N.m )
N.m N.m N.m
N.m
≦[电机 的转子惯 量JM
﹤[电机 的额定转 矩
×
[适
1.23E-05
用的 惯量
比
=30]
0.5096 N.M
﹤[电机 的瞬时最 大转矩 ≦[电机 的额定转 数 U系列的 编码器规 格为2048 (脉冲/ 转),经 编码器分 频比设定 至1000 (脉冲/ 转)的情 况下使用 。
10 15 20
3 0.1
1
80 40 0.5 0.2 0.01
③换算到 电机轴负 载惯量的 计算
滚珠丝杠的惯量JB=
负载的惯量JW=
换算到电机轴负载惯量JL=JW
JL=G2x(JW+J2)+J1
④负载转 矩的计算
伺服电机选型计算公式
选择伺服电机时,首先要考虑的是功率的选择。
一般应注意以下两点:1.如果选择的电机功率太小,就会出现“小马车”现象,会导致电机长期过载,由于发热而损坏绝缘,甚至烧坏电机。
2.如果电动机功率太大,就会出现“大手拉车”现象,其输出机械功率不能得到充分利用,功率因数和效率不高,不仅不利于用户和电网。
而且还会造成电能浪费。
也就是说,电动机功率既不能太大也不能太小。
为了正确选择电动机功率,必须进行以下计算或比较:P = F * V / 100(其中p是计算出的功率,以KW为单位,f是所需的拉力,以n为单位,v是工作机的线速度m / s)另外,最常用的方法是通过类比选择电动机的功率。
所谓的类比法是比较类似生产机械中使用的电动机的功率。
具体方法是知道该装置或附近其他装置中类似生产机械使用了多少功率电动机,然后选择具有类似功率的电动机进行调试。
调试的目的是验证所选电动机是否与生产机械匹配。
验证方法是使电动机带动生产机械运转,用钳形电流表测量电动机的工作电流,并将测量的电流与电动机铭牌上标记的额定电流进行比较。
如果电动机的实际工作电流与标在脾脏上的额定电流相差不大,则表明所选电动机的功率合适。
如果电机的实际工作电流比铭牌上标明的额定电流低70%,则表明电机功率太大,应更换功率较小的电机。
如果测得的电动机工作电流比铭牌上标出的额定电流大40%以上,则表明电动机功率过小,应更换功率较大的电动机。
实际上,它应该是考虑转矩(转矩),电动机功率和转矩的计算公式。
T =9550p / n。
其中:P功率,kw;N-电机额定转速,r / min;T扭矩,Nm。
电动机的输出扭矩必须大于工作机械所需的扭矩,并且通常需要安全系数。
机械功率公式:P = T * N / 97500P:功率单位W;T:扭矩,g / cm;N:转速,以r / min为单位。
伺服电机选型通用计算公式

9预选伺服电机的确认
所需要加速转矩确认 TP=2Л nM(JM+JL)/60ta +TL 所需要减速转矩确认 TS=2Л nM(JM+JL)/60td -TL 转矩有效值确认 Trms2=(TP2ta+TL2tc+Ts2td)/t 0.486054898 计算值 1.236262156 0.369312404
1 机器规格
序号 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 名称 负载速度 直线运动部分重量 滚珠丝杠长度 滚珠丝杠直径 滚珠丝杠导程 滚珠丝杠密度 减速比 直线运动外部力 齿轮+联轴器 转动惯量 摩擦系数 综合机械效率 加速时间 减速时间 运行时间 周期时间 符号 VL m LB dB PB ρ R F JG μ η ta tb tc t 数值 15 250 1 0.02 0.01 7870 2 0 0.00004 0.2 0.9 0.1 0.1 1 1.5 单位 m/min kg m m m kg/m3 N kg・㎡ s s s s 2s最大定位完成45mm
5、11、21、33
`2速度线图
加速时间 减速时间 运行时间 周期时间 负载轴转速 电机轴速度计算值 电机轴速度选择 TL=(9.8μ m+F)*PB/(2Л Rη ) 负载转矩计算值 ta tb tc t 0.1 0.1 1 1.5 s s s s min-1 min-1 min-2 N.m 0.433474876
`6负载行走功率 `7负加速功率 8伺服电机预选
计算值 0.433474876 362.255569 3000 0.000229365 200 3000 0.637 2.23 0.0000263 0.000394 最大值 2.23 最大值 2.23 额定转矩 0.637 额定输出 额定转速 额定转矩 、最大转矩 电机转子转动惯量 容许负载转动惯量
伺服电机的选型计算办法

伺服电机的选型计算办法一、确定负载惯量:负载惯量是指伺服电机需要驱动的负载系统的惯性矩阵。
负载的形状、质量、分布和转动部件的位置等都会影响到负载的惯性矩阵。
1.如果负载是刚体,惯性矩阵可以通过测量负载的质量和尺寸,并进行计算得到。
2.如果负载是连续变形的物体,可以通过将其分为多个刚体部分,分别计算惯性矩阵,再进行合成得到整个负载的惯性矩阵。
二、计算定格转矩和定格转速:1.根据应用的工作周期,计算出所需的平均定格转矩。
定格转矩是指电机在长时间运行情况下,能够稳定输出的转矩。
2.根据应用的工作周期和速度要求,计算出所需的平均定格转速。
定格转速是指电机能够稳定运行的最大转速。
三、选择电机型号:1.根据定格转矩和定格转速的要求,查找电机制造商提供的电机规格表,找到满足要求的电机型号。
2.选择电机型号时还需要考虑其他因素,如电机的功率、最大转矩、过载能力、加速度能力等。
根据具体应用的需求进行综合考虑,选取合适的电机型号。
四、校核选型:1.根据选择的电机型号,计算电机的部分负载转矩和转矩脉冲响应时间。
与应用要求进行比较,确保选型的合理性。
2.根据负载惯量和转矩要求,计算伺服电机的加速时间。
与应用的加速要求进行比较,确保选型的合理性。
3.根据电机的定格转矩和转速,计算电机的输出功率。
与应用的功率需求进行比较,确保选型的合理性。
五、其他因素考虑:除了上述的基本选型计算办法外,还需考虑其他因素,例如电机的可靠性、寿命、环境适应性、维护和保养成本等。
总结:伺服电机的选型计算是一个综合考虑电机的转矩、转速、功率和其他性能指标的过程。
根据负载的惯性矩阵、应用的工作周期和速度要求,选择合适的电机型号,并进行校核以确保选型的合理性。
同时,还需要考虑其他因素,如电机的可靠性、寿命和维护成本等。
以上是伺服电机选型计算的一般步骤,具体要根据具体的应用需求来选择,需要结合实际情况进行综合决策。
伺服电机选型计算公式

伺服电机选型计算公式伺服电机选型计算公式是指通过一系列的计算公式来确定伺服电机的合适参数,以满足特定需求。
伺服电机选型的主要目标是确定伺服电机的额定转矩、额定电流、额定功率等参数,以及选择合适的伺服驱动器。
下面将介绍一些常用的伺服电机选型计算公式。
1.负载的转矩计算公式:负载的转矩是伺服电机选型的基础,通过计算负载的转矩,可以确定伺服电机的额定转矩。
负载的转矩可以通过以下公式计算:负载转矩=(负载力*负载半径)/(传动效率*减速比)2.伺服电机的额定转矩计算公式:伺服电机的额定转矩是指在额定转速下,电机能够提供的最大转矩。
额定转矩可以通过以下公式计算:额定转矩=(负载转矩+加速扭矩)/传动效率3.伺服电机的额定电流计算公式:伺服电机的额定电流是指在额定转矩下,电机所需的额定电流。
额定电流可以通过以下公式计算:额定电流=额定转矩*电流系数/额定转速4.伺服电机的额定功率计算公式:伺服电机的额定功率是指在额定转矩和额定转速下,电机所提供的对外功率。
额定功率可以通过以下公式计算:额定功率=额定转矩*额定转速/9.555.伺服驱动器的额定功率计算公式:伺服驱动器的额定功率是指驱动器所能提供的最大功率。
额定功率可以通过以下公式计算:额定功率=伺服电机的额定功率/驱动器的效率除了上述几个常用的伺服电机选型计算公式外,还需要考虑一些其他因素,例如:负载的加速时间、负载的惯性矩、伺服系统的控制精度等,这些因素都会对伺服电机的选型产生影响,需要综合考虑。
同时,还需要根据具体的应用环境和需求,选择合适的伺服电机和驱动器型号,以确保系统的性能和可靠性。
需要注意的是,伺服电机选型计算公式只是一个参考,实际选型过程中还需要考虑一系列的工程参数和实际情况,同时也需要借助一些专业的伺服电机选型软件,以更准确地确定伺服电机的参数。
伺服电机选型计算数据表

速度 (mm/s)
300
0 0.2
300
0 1
300 360 1.4 0.2 0.01
0.2 时间(s)
③换算到 电机轴负 载惯量的 计算
滚珠丝杠的惯量JB=
1.50E-04 kg.m2
负载的惯量JW=
1.63E-04 kg.m2
换算到电机轴负载惯量JL=JW
JL=G2x(JW+J2)+J1
1.63E-04 kg.m2
#REF!
N.m
0.1726 N.m
1800 r/min 1000 (脉冲/转)
﹤[电 机的额 定转矩 ﹤[电 机的瞬 时最大 转矩 ≦[电 机的额 定转数 U系列 的编码
初步 选择 定 R88M U200 30(J m=
1.23E-05
根据
R88M
-
7.8E-03
U200 30的
额定
转矩
Tm=
①机械系
统的决定
负载质量M(kg)
5
·滚珠丝杠节距P(mm)
10
·滚珠丝杠直径D(mm)
20
·滚珠丝杠质量MB(kg)
3
·滚珠丝杠摩擦系数μ
0.1
·因无减速器,所以G=1、η=1
1
②动作模 式的决定
单一变化 ·负载移动速度V(mm/s) ·行程L(mm) ·行程时间tS(s) ·加减速时间tA(s) ·定位精度AP(mm)
0.5096 > 7.8E-03
0.165 N.m
0.1726 N.m 0.0078 N.m -0.1570 N.m #REF! N.m
⑨讨论 负载惯量JL
有效转矩Trms 瞬时最大转矩T1 必要的最大转数N 编码器分辨率R=P.G/AP.S
伺服电机选型计算

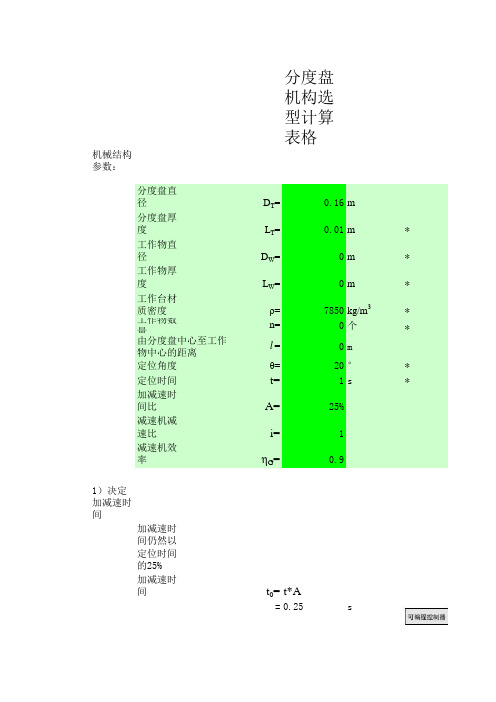
分度盘 机构选 型计算 表格
分度盘直
径
DT=
分度盘厚
度
LT=
工作物直
径
DW=
工作物厚
度
LW=
工作台材
质密度
ρ=
工作物数 量
n=
由分度盘中心至工作 物中心的距离
l=
定位角度
θ=
定位时间
t=
加速时间
比
A=
减速机减
速比
i=
减速机效
率
ηG=
0.2 m
0.118 m
*
0.03 m
*
0.05 m
*
2700 kg/m3
*
10 个
*
0.125 m
180 °
*
3s
*
10%
10
1
1)决定 加减速时 间
加速时间
2)电机转 速
t0= t*A
= 0.3
s
360 t 0(t t 0)
减速机输 出轴角加 速度
减速机输 出轴最大 转速
电机轴角 加速度
电机输出 轴转速
3)计算负 载转矩
因为摩擦负载及小, 故忽略
4)计算电 机轴加速 转矩(克 服惯量)
工作台的 惯量
工作物的 惯量
(工作物同时绕工作物中 心轴旋转,如果工作物没有 自转,可以不考虑这部分 惯量)
工作物质 量
βG= 360
t 0(t t 0)
= 3.878518519 rad/s2
βG t0 2
N= = 11.11111111 rpm
βm= βG*i = 38.78518519 rad/s2
NM= N*i = 111.1111111 rpm
伺服电机选型计算(汇川)
LB=
1.8 m
DB=
0.025 m
PB=
0.02 m
MC
0.2 kg
DC
0.06 m
μ=
0.05
L=
1.3 m
η=
0.9
t=
0.65 s
A=
40%
FA=
0N
a=
0°
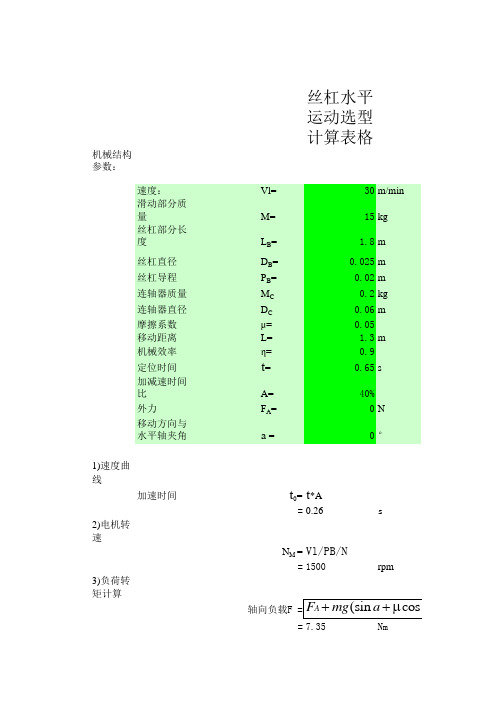
t0= t*A
= 0.26
s
NM = Vl/PB/N
= 1500
rpm
轴向负载F = FFAA+ mg(sin a cos a)
= 7.35
7)负荷与 电机惯量 比
惯量比
8)负荷与 减速机惯 量比 当负荷与 电机惯量 比>5时, 考虑采用 减速装 置,提高 惯量匹配
折算后的惯 量比
I1= 0.715738645
I2= 0.715738645
T=
2.332444717
N=
1500
*
其他常数
*
*
*
丝杠密度
*
*
*
*
* *
*
G=
9.8 m/s
机械结构 参数:
速度: 滑动部分质 量 丝杠部分长 度
丝杠直径 丝杠导程 连轴器质量 连轴器直径 摩擦系数 移动距离 机械效率 定位时间 加减速时间 比 外力 移动方向与 水平轴夹角
1)速度曲 线
加速时间
2)电机转 速
3)负荷转 矩计算
丝杠水平 运动选型 计算表格
Vl=
30 m/m3.1416
ρ=
7900 kg/m3
a cos a)
安全系数
S=
2
电机惯量
JM=
伺服电机选型计算(自动计算版)

负载质量M(kg5·滚珠丝杠节距P(mm10·滚珠丝杠直径D(mm20·滚珠丝杠质量MB(kg3·滚珠丝杠摩擦系数μ0.1·因无减速器,所以G=1、η=11②动作模式的决定速度(mm/s单一变化·负载移动速度V(mm/s300·行程L(mm360·行程时间tS(s 1.4·加减速时间tA(s0.2·定位精度AP(mm0.01③换算到电机轴负载惯量的计算滚珠丝杠的惯量JB= 1.50E-04kg.m2 负载的惯量JW= 1.63E-04kg.m2换算到电机轴负载惯量JL=JW J=G2x(J W+J2+J1 1.63E-04kg.m2L④负载转矩的计算对摩擦力的转矩Tw7.80E-03N.m换算到电机轴负载转矩TL=Tw7.80E-03N.m⑤旋转数的计算转数N N=60V/P.G1800r/min⑥电机的初步选定[选自OMNUC U系列的初步选定举例] 选定电机的转子·惯量为负载的JM≥J L/30 5.42E-06kg.m2 1/30*以上的电机选定电机的额定转矩×0.8TMx0.8>T L0.5096>比换算到电机轴负载转矩大的电机N.m* 此值因各系列而异,请加以注意。
⑦加减速转矩的计算加减速转矩TA0.165N.m⑧瞬时最大转矩、有效转矩的计算必要的瞬时最大转矩为T1T1=TA+TL0.1726N.mT2=TL0.0078N.mT3=TL-TA-0.1570N.m有效转矩Trms为0.095N.m⑨讨论负载惯量JL 1.63E-04kg.m2≦[电机的转子惯量JM有效转矩Trms0.095N.m﹤[电机的额定转矩瞬时最大转矩T10.1726N.m﹤[电机的瞬时最大转矩必要的最大转数N1800r/min≦[电机的额定转数编码器分辨率R=P.G/AP.S1000(脉冲/转U系列的编码器规格为204速度(mm/s3000.210.20.2时间(s初步选择定R88M-U20030(Jm= 1.23E-05 根据R88M-U20030的额定转矩Tm=(N.m≦[电机的转子惯量JM1.23E-05×[适用的惯量比=30]﹤[电机的额定转矩0.5096N.M7.8E-030.637﹤[电机的瞬时最大转矩 1.528 N.M ≦[电机的额定转数 3000 r/min U系列的编码器规格为2048(脉冲/转),经编码器分频比设定至1000(脉冲/转)的情况下使用。
伺服电机简易选型表格V2.0
5.39
6000
1.7
3.18
6000
1.87 (3.12)
3.18
6000
1.87 (3.12)
3.18
3000
19.3 (21.8)
8.34
3000
19.3 (21.8)
8.34
5000
2.46 (3.71)
4.9
பைடு நூலகம்5000
2.46 (3.71)
4.9
13.5 13.5 9.54 9.54 9.54 20.85 20.85 14.7 14.7
所选电机 额定转速 所选电机 转子惯量 所选电机 额定扭矩 所选电机 最大扭矩
加速转矩 中间量 匀速转矩
减速转矩
计算结果
折算后所需电机转 速 折算后总的负载惯 量 折算后总的有效扭 矩 折算后总的最大扭 矩
所选电机额定转速 所选电机转子惯量 所选电机额定扭矩 所选电机最大扭矩
加速转矩 中间量 匀速转矩
ρ
7900 Kg/m3
J
1.514806
×104Kgm2
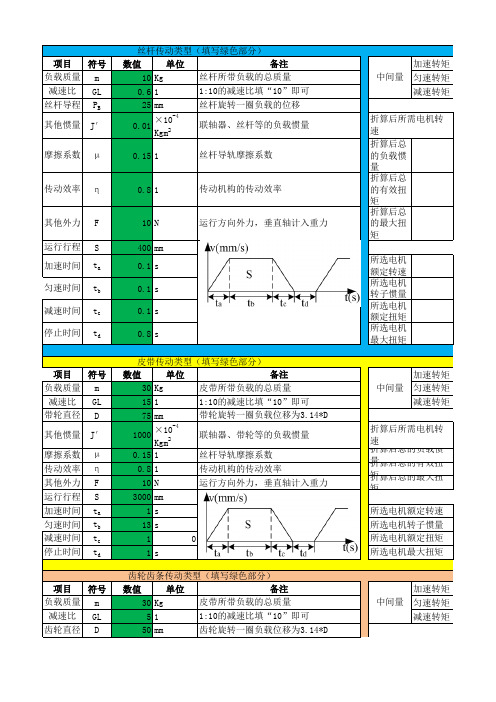
图示及带轮惯量计算
带轮惯量计算(填写绿色部分)
外径 内径 密度 厚度 惯量
D
75 mm
d
0 mm
ρ
2700 Kg/m3
L J
10 0.838704
m×m104Kgm2
图示及齿轮惯量计算
n
260.435361 rpm
JL Trms
7.5004 0.40620127
10 N
运行方向外力,垂直轴计入重力
3000 mm
1s
13 s
1
0
1s
齿轮齿条传动类型(填写绿色部分)
伺服电机的选型计算方法
伺服电机的选型计算方法止时转速过高易出现过冲的现象,所以为保证其控制精度,应处理好升、降速问题。
交流伺服驱动系统为闭环控制,驱动器可直接对电机编码器反馈信号进行采样,内部构成位置环和速度环,不会出现步进电机的丢步或过冲的现象,控制性能更为可靠。
六、速度响应性能不同步进电机从静止加速到工作转速(一般为每分钟几百转)需要200~400毫秒。
交流伺服系统的加速性能较好,以京伺服(KINGSERVO)400W交流伺服电机为例,从静止加速到其额定转速3000RPM仅需几毫秒,可用于要求快速启停的控制场合。
综上所述,交流伺服系统在许多性能方面都优于步进电机。
但在一些要求不高的场合也经常用步进电机来做执行电动机。
所以,在控制系统的设计过程中要综合考虑控制要求、成本等多方面的因素,选用适当的控制电机。
?1.负载惯量的计算。
由电机驱动的所有运动部件,无论旋转运动的部件,还是直线运动的部件,都成为电机的负载惯量。
电机轴上的负载总惯量可以通过计算各个被驱动的部件的惯量,并按一定的规律将其相加得到。
1)圆柱体惯量如滚珠丝杠,齿轮等围绕其中心轴旋转时的惯量可按下面公式计算: J=(πγ/32)*D4L(kg cm2)如机构为钢材,则可按下面公式计算: J=*10-6)*D4L(kg cm2) 式中: γ材料的密度(kg/cm2)D圆柱体的直经(cm) L圆柱体的长度(cm)2)轴向移动物体的惯量工件,工作台等轴向移动物体的惯量,可由下面公式得出: J=W*(L/2π)2 (kg cm2)式中: W直线移动物体的重量(kg) L 电机每转在直线方向移动的距离(cm)3)圆柱体围绕中心运动时的惯量如图所示: 圆柱体围绕中心运动时的惯量属于这种情况的例子:如大直经的齿轮,为了减少惯量,往往在圆盘上挖出分布均匀的孔这时的惯量可以这样计算: J=Jo+W*R2(kg cm2)式中:Jo为圆柱体围绕其中心线旋转时的惯量(kgcm2) W圆柱体的重量(kg) R旋转半径(cm)4)相对电机轴机械变速的惯量计算将上图所示的负载惯量Jo折算到电机轴上的计算方法如下: J=(N1/N2)2Jo 式中:N1 N2为齿轮的齿数?2.53.电机加速或减速时的转矩电机加速或减速时的转矩1)按线性加减速时加速转矩计算如下: Ta =(2πVm/60*104) *1/ta(Jm+JL)(1-e-ks。
伺服电机及丝杠选型计算(自动表格计算)

J 0 =铁Jx =铝Jy =黄铜m =尼龙d0 =外径(m)d1 =外径(m)pi l =长度(m)注:国际单位外径d 0(mm)50*0.05m 内径d 1(mm)0*0m 长度L(mm)密度ρ(kg/m 3)7800*重心线与旋转轴线距离e (mm)0*0m计算结果:0.15315251物体质量m(kg)0.15315物体惯量(kg.cm 2)0.478593754.786E-05kg.m 2外径d 0(mm):200*0.2m 内径d 1(mm):100*0.1m 长度L(mm):400*0.4m密度ρ(kg/m 3):7900重心线与旋转轴线距离e (mm)100*0.1m计算结果:74.455683物体质量m(kg)00物体惯量(kg.cm 2)0kg.m 2不同形状物体惯量计算x 0轴(通过重心的轴)的惯性惯量 [kg·m 2]x轴的惯性惯量 [kg·m2]y轴的惯性惯量 [kg·m2]圆柱体惯量计算-圆柱体长度方向中心线和旋转中心线平行圆柱体惯量计算-圆柱体长度方向中心线和和旋转中心线垂直方形物体惯量计算质量(kg)长度x(mm):850*0.85m 宽度y(mm):950*0.95m 高度z(mm):85*0.085m密度ρ(kg/m 3):7900重心线与旋转轴线距离e (m)600*0.6m计算结果:542.23625物体质量m(kg)35物体惯量(kg.cm 2)173395.83317.339583kg.m 2直径d(mm)80*0.08m 厚度h(mm)30*0.03m密度ρ(kg/m 3)7900重心线与旋转轴线距离e (mm)0*0m计算结果:质量0.56物体质量m(kg)35物体惯量(kg.cm 2)2800.028kg.m 2物体质量m(kg)1000*物体惯量(kg.cm 2)9.118921930.0009119kg.m2惯量J 0(kg.cm 2)1354*0.1354kg.m2质量m(kg)重心线与旋转轴线距离e (mm)600*6m直线运动物体惯量计算直接惯量计算电机每转1圈物体直线运动量A (m)饼状物体惯量计算0.006*2()2A J m π=2222,53mr mr (注明:实心球惯量=薄壁球惯量=)计算结果:质量m1(kg)35惯量J1(kg.cm2)12735412.7354kg.m27.9x103kg/m3 2.8x103kg/m3 8.5x103kg/m3 1.1x103kg/m33.14159*为必填项。
伺服电机的选型计算

⋅
2
电机转速为3000转 TL = 0.035 TL ⋅ 2 ⋅ n PZ ≔ ―――― = 12.107 η 查表得MQMA-02 Pe ≔ 0.2 JM ≔ 0.42 ⋅ 10
−4
⋅
3 1 n=⎛ ⎝3 ⋅ 10 ⎞ ⎠ ――
⋅
⋅
2
Te ≔ 0.64
⋅
TAC ≔ 1.91
⋅
(5)最短加减速时间 ⎛ ⎝JM + JL⎞ ⎠ ⋅ (n − 0) ⋅ 2 tAC ≔ ――――――― = 0.026 TAC − TL 工作时加减速时间为0.08秒,则加减速转矩为 tAC ≔ 0.08 ⎛ ⎝JM + JL⎞ ⎠ ⋅ (n − 0) ⋅ 2 TAC ≔ ―――――――+ TL = 0.641 tAC (6)运行模式及热校核 t1 ≔ 0.1 t2 ≔ 0.1 t3 ≔ 0.1 t0 ≔ 0.2 ⋅
T1 ≔ TAC = 0.641
⋅
T3‾‾‾‾‾‾‾‾‾‾‾‾‾‾‾‾‾‾‾‾ T1 ⋅ t1 + T2 ⋅ t2 + T3 ⋅ t3 Trms ≔ ―――――――― = 0.405 t0 + t1 + t2 + t3
⋅
丝杆螺距 p=10mm,输送质量 W=20kg,推力0kg(无),试选择伺服电机的容量.
(1)最大移动速度v 由于采用直接传动,减速比i=1,当选择电机的额定转速为3000r/min时,工作台 的最大移动速度为: 1 p ≔ 10 i≔1 n ≔ 3000 ⋅ ―― min v ≔ n ⋅ p ⋅ i = 500 ――
2 2
⋅
2
(3)负载转矩Tl 工作台导轨移动摩擦系数=0.1,机械效率=0.9 μ ≔ 0.1 η ≔ 0.9 F≔0 ⋅
伺服电机选型参数计算表

参数名称 质量 平衡质量 平衡力 丝杠直径 丝杠导程 丝杠长度 减速比 其他惯量 摩擦系数 切削力 机械效率 倾斜角 最大进给速度 最大加速度
参数名称 电机一转移动量 电机最大转速 质量折算惯量 丝杠折算惯量 其他惯量 负载惯量 摩擦扭矩 重力扭矩 空载扭矩 切削扭矩 负载扭矩 加速扭矩
值 63% 5% 5%
型参数计算表
参数
型变量表
0.51991 0
12.8436
备注 包括工作台及工作台的负载质量
丝杆转动一圈的距离 主要包括电机到丝杠间减速机构在电机轴端的折算惯量 根据实际机械情况设定,一般滚动导轨为0.05,滑动导轨为0.1 无法确定可暂设为0,电机选型时根据空载扭矩比率进行选型
基本参数
值
500
0
0
40
0.04
6
0.006
500
0.5
1
0
0.1
0.9 0 8 5
P N J11 J12 J13 J1 Tf Tg Tm Tc Tmc Tmax
单位 m/rev rev/min kgm2 kgm2 kgm2 kgm2
Nm Nm Nm Nm Nm Nm
值 0.006 1333 0.00046 0.001
型号 参数 惯量 扭矩 最大扭矩 电机最高转速
参数 负载惯量比 空载扭矩比率 负载扭矩比率 最高转速 加速扭矩
m mb Fb
d Pb
l 1/z J13
u Fc
θ V amax
单位 kg kg N mm mm/rev mm 1/ kgm2 N ° m/min m/sec2
水平轴 丝杠
伺服电机选型参数计算表
0 0.00146 0.5199
步进伺服电机选型计算v1.1.xls
分度盘机构选型计算表格机械结构参数:分度盘直径D T =0.16m 分度盘厚度L T =0.01m *工作物直径D W =0m *工作物厚度L W =0m *工作台材质密度ρ=7850kg/m 3*工作物数量n=0个*l =0m 定位角度θ=20°*定位时间t=1s *加减速时间比A=25%减速机减速比i=1减速机效率ηG =0.91)决定加减速时间加减速时间仍然以定位时间的25%加减速时间t 0=t*A=0.25s2)电机转速减速机输出轴角加速度βG == 1.861688889rad/s 2减速机输出轴最大转速N== 4.444444444rpm电机轴角加速度βm=βG *i= 1.861688889rad/s 2电机输出轴转速N M =N*i= 4.444444444rpm3)计算负载转矩由分度盘中心至工作物中心的距离0(0)360t t t θπ⨯2-G 0β2t π⨯⨯60T L =0Nm4)计算电机轴加速转矩(克服惯量)工作台的惯量J T=0.005050687kgm 2工作物的惯量J W1==kgm 2工作物质量m w ==0kg工作物的惯量J W =(按工作物体中心自转)=0kgm 全负载惯量J L =J T +J W=0.005050687kgm 25)加速转矩=0.005050687kgm 2T s 6)必须转矩必须转矩T=(T S +T L )*S=0.765570686Nm6)负荷与电机惯量比惯量比因为摩擦负载及小,故忽略负载折算到电机轴上的惯量:电机轴加速转矩J LM =J L /i 2(工作物同时绕工作物中心轴旋转,如果工作物没有自转,可以不考虑这部分惯量)=0.028059375计算表格其他常数G=9.8m/spi= 3.1416电机惯量J M=0.18kgm2安全系数S=2*。
数控机床伺服电机的选择计算

JL Jm×2.5JM:伺服电机的转动惯量
(3)加速扭矩TA
TA= +TF(Nm)
TA Tmax×0.8Tmax:伺服电机最大扭矩
(4)最大切削扭矩Tc
TC= +TF(Nm)
TC Tms×1.5Tms:伺服电机额定扭矩
(5)连续有效负荷扭矩Trms
Trms= TC (Nm)TC:最大切削扭矩D:最大工作率
(2)直连最大切削扭矩Tc
Tc= +TF≈0.16FZ×PB(Nm)
TC≈0.16FZ(千牛)×PB(毫米)
Trms TMS×0.8 Tms:伺服电机额定扭矩
(6)最大负荷持续时间tLON
计算超负荷百分比TC/TMS和最大工作率D,从图表上查出伺服电机允许的最大持续时间tMON
tLON tMONtMON:伺服电机允许持续时间
2.快速估算
(1)加速扭矩TA
TAmin)×(JL+ JM)(10-3Kgm2)
数控机床伺服电机的选择计算
1.选择依据计算
(1)最大速度n
n= × Fg0:g0速率PB:丝杠螺距
Z1:电机侧齿数Z2:丝杠侧齿数
n nmaxnmax:伺服电机最高转速
(2)马达轴上折算负载惯量JL
床鞍滑板和刀架总惯量JT=mT (Kgm2)
马达侧齿轮Z1惯量J1
丝杠侧齿轮Z2惯量J2
丝杠惯量JS= 0.77×103D4L(Kgm2)
伺服电机选型计算公式及注意事项
伺服电机选型计算公式及注意事项伺服电机选择的时候,首先一个要考虑的就是功率的选择。
一般应注意以下两点:1。
如果电机功率选得过小.就会出现“小马拉大车”现象,造成电机长期过载,使其绝缘因发热而损坏,甚至电机被烧毁。
2。
如果电机功率选得过大.就会出现“大马拉小车”现象,其输出机械功率不能得到充分利用,功率因数和效率都不高,不但对用户和电网不利。
而且还会造成电能浪费。
也就是说,电机功率既不能太大,也不能太小,要正确选择电机的功率,必须经过以下计算或比较:P=F*V/100(其中P是计算功率,单位是KW,F是所需拉力,单位是N,V是工作机线速度m/s)此外.最常用的是采用类比法来选择电机的功率。
所谓类比法,就是与类似生产机械所用电机的功率进行对比。
具体做法是:了解本单位或附近其他单位的类似生产机械使用多大功率的电机,然后选用相近功率的电机进行试车。
试车的目的是验证所选电机与生产机械是否匹配。
验证的方法是:使电机带动生产机械运转,用钳形电流表测量电机的工作电流,将测得的电流与该电机铭牌上标出的额定电流进行对比。
如果电功机的实际工作电流与铭脾上标出的额定电流上下相差不大,则表明所选电机的功率合适。
如果电机的实际工作电流比铭牌上标出的额定电流低70%左右.则表明电机的功率选得过大,应调换功率较小的电机。
如果测得的电机工作电流比铭牌上标出的额定电流大40%以上.则表明电机的功率选得过小,应调换功率较大的电机。
实际上应该是考虑扭矩(转矩),电机功率和转矩计算公式。
即T = 9550P/n式中:P —功率,kW;n —电机的额定转速,r/min;T —转矩,Nm。
电机的输出转矩一定要大于工作机械所需要的转矩,一般需要一个安全系数。
机械功率公式:P=T*N/97500P:功率单位W;T:转矩,单位克/cm;N:转速,单位r/min。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
1.528 N.M
3000
r/mi n
条件满足 条件满足
条件满足 条件满足
条件满足
换算到电机轴负载转矩TL=Tw
⑤旋转数 的计算
转数N
⑥电机的 初步选定 [选自 OMNUC U 系列的初 步选定举 例]
N=60V/P.G
选定电机的转子·惯量为负载的 1/30*以上的电机
JM≥JL/30
0.015605096 320
6.9017E-06
选定电机的额定转矩×0.8 比换算到电机轴负载转矩 大的电机N.m
TMx0.8>TL
* 此值因各系列而异,请加以注 意。
⑦加减速 转矩的计 算
加减速转矩TA
0.5096 0.037
⑧瞬时最 大转矩、 有效转矩 的计算
必要的瞬时最大转矩为T1
有效转矩Trms为
T1=TA+TL T2=TL T3=TL-TA
0.0523 0.0156 -0.0211
0.029
⑨讨论 负载惯量JL 有效转矩Trms
10 15 20
3 0.1
1
80 40 0.5 0.2 0.01
③换算到 电机轴负 载惯量的 计算
滚珠丝杠的惯量JB=
负载的惯量JW=
换算到电机轴负载惯量JL=JW
JL=G2x(JW+J2)+J1
④负载转 矩的计算
对摩擦力的转矩Tw
0.00015 0.000207051 0.000207051
0.015605096
2.07E-04 kg.m2 0.029 N.m
瞬时最大转矩T1 必要的最大转数N
编码器分辨率R=P.G/AP.S
0.0523 N.m 320 r/min
1500 (脉冲/转)
速度 (mm/s)
300
0
0.2
1
0.2 0.2
时间 (s)
kg.m2 kg.m2 kg.m2
N.m
N.m r/min
①机械系 统的决定
负载质量M(kg) ·滚珠丝杠节距P(mm) ·滚珠丝杠直径D(mm) ·滚珠丝杠质量MB(kg) ·滚珠丝杠摩擦系数μ ·因无减速器,所以G=1、η=1
②动作模 式的决定
单一变化 ·负载移动速度V(mm/s) ·行程L(mm) ·行程时间tS(s) ·加减速时间tA(s) ·定位精度AP(mm)
kg.m2 >
初步
选择
定R88M-Fra bibliotekU200
30(J
m=
根据
R88M
-
1.6E-02
U200 30的
额定
转矩
Tm=
N.m
1.23E-05
0.637
(N.m )
N.m N.m N.m
N.m
≦[电机 的转子惯 量JM
﹤[电机 的额定转 矩
×
[适
1.23E-05
用的 惯量
比
=30]
0.5096 N.M
﹤[电机 的瞬时最 大转矩 ≦[电机 的额定转 数 U系列的 编码器规 格为2048 (脉冲/ 转),经 编码器分 频比设定 至1000 (脉冲/ 转)的情 况下使用 。