机械设计双语版 第3章
(机械设计理论)双语版
Machine design theory(机械设计理论)——中英文对照The machine design is through designs the new product or improves the old product to meet the human need the application technical science. It involves the project technology each domain, mainly studies the product the size, the shape and the detailed structure basic idea, but also must study the product the personnel which in aspect the and so on manufacture, sale and use question.Carries on each kind of machine design work to be usually called designs the personnel or machine design engineer. The machine design is a creative work. Project engineer not only must have the creativity in the work, but also must in aspect and so on mechanical drawing, kinematics, engineerig material, materials mechanics and machine manufacture technology has the deep elementary knowledge.If front sues, the machine design goal is the production can meet the human need the product. The invention, the discovery and technical knowledge itself certainly not necessarily can bring the advantage to the humanity, only has when they are applied can produce on the product the benefit. Thus, should realize to carries on before the design in a specific product, must first determine whether the people do need this kind of productMust regard as the machine design is the machine design personnel carries on using creative ability the product design, the system analysis and a formulation product manufacture technology good opportunity. Grasps the project elementary knowledge to have to memorize some data and the formula is more important than. The merely service data and the formula is insufficient to the completely decision which makes in a good design needs. On the other hand, should be earnest precisely carries on all operations. For example, even if places wrong a decimal point position, also can cause the correct design to turn wrongly.A good design personnel should dare to propose the new idea, moreover is willing to undertake the certain risk, when the new method is not suitable, use original method. Therefore, designs the personnel to have to have to have the patience, because spends the time and the endeavor certainly cannot guarantee brings successfully. A brand-new design, the request screen abandons obsoletely many, knows very well the method for the people. Because many person of conservativeness, doesthis certainly is not an easy matter. A mechanical designer should unceasingly explore the improvement existing product the method, should earnestly choose originally, the process confirmation principle of design in this process, with has not unified it after the confirmation new idea.Newly designs itself can have the question occurrence which many flaws and has not been able to expect, only has after these flaws and the question are solved, can manifest new goods come into the market the product superiority. Therefore, a performance superior product is born at the same time, also is following a higher risk. Should emphas ize, if designs itself does not request to use the brand-new method, is not unnecessary merely for the goal which transform to use the new method.In the design preliminary stage, should allow to design the personnel fully to display the creativity, not each kind of restraint. Even if has had many impractical ideas, also can in the design early time, namely in front of the plan blueprint is corrected. Only then, only then does not send to stops up the innovation the mentality. Usually, must propose several sets of design proposals, then perform the comparison. Has the possibility very much in the plan which finally designated, has used certain not in plan some ideas which accepts.How does the psychologist frequently discuss causes the machine which the people adapts them to operate. Designs personnel''s basic responsibility is diligently causes the machine to adapt the people. This certainly is not an easy work, because certainly does not have to all people to say in fact all is the most superior operating area and the operating process.Another important question, project engineer must be able to carry on the exchange and the consultation with other concerned personnel. In the initial stage, designs the personnel to have to carry on the exchange and the consultation on the preliminary design with the administrative personnel, and is approved. This generally is through the oral discussion, the schematic diagram and the writing material carries on. In order to carry on the effective exchange, needs to solve the following problem:(1) designs whether this product truly does need for the people? Whether there is competitive ability(2) does this product compare with other companies'' existing similar products?(3) produces this kind of product is whether economical?(4) product service is whether convenient?(5) product whether there is sale? Whether may gain?Only has the time to be able to produce the correct answer to above question. But, the product design, the manufacture and the sale only can in carry on to the above question preliminary affirmation answer foundation in. Project engineer also should through the detail drawing and the assembly drawing, carries on the consultation together with the branch of manufacture to the finally design proposal.Usually, can have some problem in the manufacture process. Possibly can request to some components size or the common difference makes some changes, causes the components the production to change easily. But, in the project change must have to pass through designs the personnel to authorize, guaranteed cannot damage the product the function. Sometimes, when in front of product assembly or in the packing foreign shipment experiment only then discovers in the design some kind of flaw. These instances exactly showed the design is a dynamic process. Always has a better method to complete the design work, designs the personnel to be supposed unceasingly diligentlyRecent year, the engineerig material choice already appeared importantly. In addition, the choice process should be to the material continuously the unceasing again appraisal process. The new material unceasingly appears, but some original materials can obtain the quantity possibly can reduce. The environmental pollution, material recycling aspect and so on use, worker''s health and security frequently can attach the new limiting condition to the choice of material. In order to reduce the weight or saves the energy, possibly can request the use different material. Comes from domestic and international competition, to product service maintenance convenience request enhancement and customer''s aspect the and so on feedback pressure, can urge the people to carry on to the material reappraises. Because the material does not select when created the product responsibility lawsuit, has already had the profound influence. In addition, the material and between the material processing interdependence is already known by the people clearly.Therefore, in order to can and guarantees the quality in the reasonable cost under the premise to obtain satisfaction the result, project engineer makes engineers all to have earnestly carefully to choose, the determination and the use material.Makes any product the first step of work all is designs. Designs usually may divide into several explicit stages: (a) preliminary design; (b) functional design;(c) production design. In the preliminary design stage, the designer emphatically considered the product should have function. Usually must conceive and consider several plans, then decided this kind of thought is whether feasible; If is feasible, then should makes the further improvement to or several plans. In this stage, the question which only must consider about the choice of material is: Whether has the performance to conform to the request material to be possible to supply the choice; If no, whether has a bigger assurance all permits in the cost and the time in the limit develops one kind of new material.In the functional design and the engineering design stage, needs to make a practical feasible design. Must draw up the quite complete blueprint in this stage, chooses and determines each kind of components the material. Usually must make the prototype or the working model, and carries on the experiment to it, the appraisal product function, the reliability, the outward appearance and the service maintenance and so on. Although this kind of experiment possibly can indicate, enters in the product to the production base in front of, should replace certain materials, but, absolutely cannot this point take not earnestly chooses the material the excuse. Should unify the product the function, earnestly carefully considers the product the outward appearance, the cost and the reliability. Has the achievement very much the company when manufacture all prototypes, selects the material should the material which uses with its production in be same, and uses the similar manufacture technology as far as possible. Like this has the advantage very much to the company. The function complete prototype if cannot act according to the anticipated sales volume economically to make, or is prototypical and the official production installment has in the quality and the reliable aspect is very greatly different, then this kind of prototype does not have the great value. Project engineer is best can completely complete the material in this stage the analysis, the choice and the determination work, but is not remains it to the production design stage does. Because, is carries on in the production design stage materialreplacement by other people, these people are inferior to project engineer to the product all functions understanding. In the production design stage, is should completely determine with the material related main question the material, causes them to adapt with the existing equipment, can use the existing equipment economically to carry on the processing, moreover the material quantity can quite be easy to guarantee the supply.In the manufacture process, inevitably can appear to uses the material to make some changes the situation. The experience indicated that, may use certain cheap materials to take the substitute. However, in the majority situation, in will carry on the production later to change the material to have in to start before the production to change the price which the material will spend to have to be higher than. Completes the choice of material work in the design stage, may avoid the most such situations. Started after the production manufacture to appear has been possible to supply the use the new material is replaces the material the most common reason. Certainly, these new materials possibly reduce the cost, the improvement product performance. But, must carry on the earnest appraisal to the new material, guarantees its all performance all to answer the purpose. Must remember that, the new material performance and the reliable very few pictures materials on hand such understood for the people. The majority of products expiration and the product accident caused by negligence case is because in selects the new material to take in front of substitution material, not truly understood their long-term operational performance causes.The product responsibility lawsuit forces designs the personnel and the company when the choice material, uses the best procedure. In the material process, five most common questions are: (a) did not understand or cannot use about the material application aspect most newly the best information paper; (b) has not been able to foresee and to consider the dusk year possible reasonable use (for example to have the possibility, designs the personnel also to be supposed further to forecast and the consideration because product application method not when creates consequence.In r ecent years many products responsibilities lawsuit case, because wrongly uses the plaintiff which the product receives the injury to accuse produces the factory, and wins the decision); (c) uses the material data not entire perhaps some data areindefinite, works as its long-term performance data is the like this time in particular; (d) the quality control method is not suitable and not after the confirmation; (e) the personnel which completely is not competent for the post by some chooses the material.Through to the above five questions analysis, may obtain these questions is does not have the sufficient reason existence the conclusion. May for avoid these questions to these questions research analyses the appearance indicating the direction. Although uses the best choice of material method not to be able to avoid having the product responsibility lawsuit, designs the personnel and the industry carries on the choice of material according to the suitable procedure, may greatly reduce the lawsuit the quantity.May see from the above discussion, the choice material people should to the material nature, the characteristic and the processing method have comprehensive and the basic understanding.机械设计理论机械设计是一门通过设计新产品或者改进老产品来满足人类需求的应用技术科学。
机械设计基础课件第三章下载

机械设计基础课件第三章教学内容:本节课的教学内容选自机械设计基础课件的第三章。
第三章主要介绍了机械设计的基本原则和步骤,包括设计前的准备、设计方案的制定、设计计算、设计图的绘制和设计评审等。
具体内容包括:1. 设计前的准备:市场需求分析、技术条件分析、设计任务书编制等。
2. 设计方案的制定:设计方案的提出、比较和选择等。
3. 设计计算:计算方法的选择、计算过程的实施等。
4. 设计图的绘制:图样编制、图形表达、尺寸标注等。
5. 设计评审:评审标准、评审方法、评审结果的处理等。
教学目标:1. 使学生了解机械设计的基本原则和步骤,理解设计前的准备、设计方案的制定、设计计算、设计图的绘制和设计评审等环节的重要性。
2. 培养学生运用机械设计的基本原理和方法解决实际问题的能力。
3. 提高学生的创新意识和团队合作能力,培养学生的综合设计能力。
教学难点与重点:重点:机械设计的基本原则和步骤,设计前的准备、设计方案的制定、设计计算、设计图的绘制和设计评审等环节的内容。
难点:设计计算的方法和过程,设计图的绘制和尺寸标注的规范。
教具与学具准备:教具:电脑、投影仪、黑板、粉笔。
学具:教材、笔记本、绘图工具(如直尺、圆规、橡皮等)。
教学过程:1. 引入:通过一个实际的机械设计案例,引发学生对机械设计的兴趣和好奇心。
2. 讲解:讲解机械设计的基本原则和步骤,重点讲解设计前的准备、设计方案的制定、设计计算、设计图的绘制和设计评审等环节的内容。
3. 示例:通过一个具体的设计实例,展示设计计算的过程和方法,设计图的绘制和尺寸标注的规范。
4. 练习:学生分组进行设计练习,教师巡回指导,及时纠正错误和解答疑问。
6. 作业布置:布置相关的设计练习题目,要求学生在课后完成。
板书设计:板书设计要清晰、简洁,突出重点。
可以采用流程图、图示、列表等形式,将设计前的准备、设计方案的制定、设计计算、设计图的绘制和设计评审等环节的内容展示给学生。
作业设计:1. 题目:设计一个简单的机械部件,如螺栓、螺母等。
机械设计制造及其自动化专业英语第三单元
Mechanical properties of Materials材料的机械特性The materials properties can be classified into three major heading:(i)Physical,(ii)Chemical,(iii)Mechanical。
材料的特性可以分为三个重要的部分:1 是物理特性,2 是化学特性,3 是机械特性。
Physical Properties物理特性Density or specific gravity, moisture content, etc., can be classified under this category.密度或者比重,水分含量等,都被分为这一类的范畴Chemical Properties化学特性Many chemical properties come under this category. These include acidity or alkalinity,许多化学特性都归入到这个范畴。
这些特性包括酸性或碱性reactivity and corrosion. The most important of these is corrosion which 反应性和腐蚀性。
can be explained in layman’s terms as the resistance of the material to decay while in continuous use in a particularatmosphere这些中最重要的是耐腐蚀性,它可以被解释为在外行人看来作为材料在特定大气中长期使用时抵抗腐蚀的能力。
Mechanical Properties(机械特性)Mechanical properties include the strength properties like tensile, compression, shear, torsion, impact, fatigue and creep.机械特性包括拉伸,压缩,剪切,扭转,冲击,疲劳和蠕变等强度特性。
机械设计基础第3章PPT

40
20 15
10 8 6
4
2 1.5
1 0.8 0.6 0.4
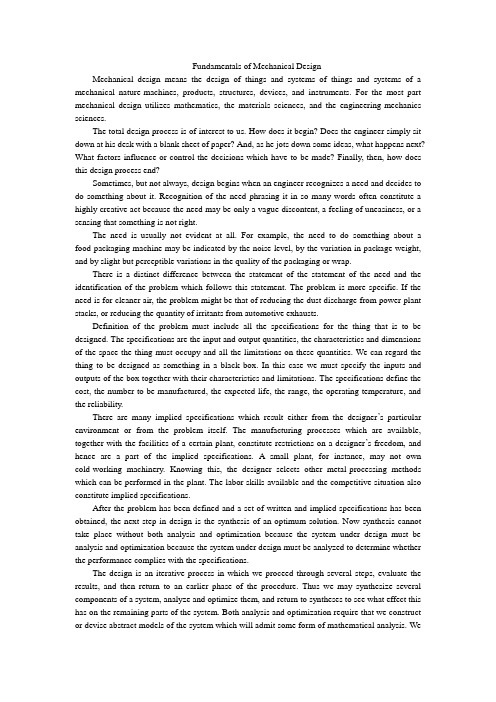
32A 2 4A28 A 20 A 16 A
1 2A 10 A 08 A
链号
08A 10A 12A 16A 20A 24A 28A 32A
节 距/ m m
12.7 15.875 19.05
25.4 31.75 38.1 41.45 50.8
0.2
0.15 0.1 10
15 20
40
60 80 100150200
400 600 1000 2000 800 1500
4 0 0 06 0 0 0
小 链 轮 转 速 n1 ( r / m i n )
23
、
3.8 滚子链传动的设计
n12
3.8.3滚子链的设计计算
1.设计链传动的已知条件和内容
第3章 带传动和链传 动
3.4.1 带传动的主要失效形式和设计准则
带传动的主要失效形式有带的打滑和带的疲 劳破坏。因此,带传动的设计准则是:在保 证不打滑的前提下,传动带应具有足够的疲劳 强度和一定的使用寿命。
第3章 带传动和链传 动
3.4.2单根V带的基本额 定功率
(3-10)
表3-4给出了单根V带的基本额定功率P
值(仅列出D型)
普通V带已标准化,按截面尺 寸分为Y、Z、A、B、C、D、 E 七种型号
7
3.2.2 V带轮的材料和结构
第3章 带传动和链传 动
图3-5 V带轮(腹板式) 1一轮缓2一瞧板3一轮毂
表3-3 V带轮的基准直径系列 (摘自 GB/T13575.5-1992)
8
3.3 普通V带传动工作能力分析 3.3.1 带传动的受力分析
精品课件-机械工程英语-Chapter 3
1. What is CAD? 2. How do CAD and CAM systems work together in manufacture? 3. What is the main function of CAM?
robot conveyor stamping machine chisel welding steel sheet steering wheel roll engine protective cloth
Chapter 3 Mechanical Designing
Task 2 Listen to the news report and answer the questions.
Task 3 Work in pairs. A is now presenting the prototype of electric scooter to B. Make a conversation with your partner according to the information given below.
3. This symbol warns against dangerous voltage!
Chapter 3 Mechanical Designing
6. This symbol indicates prohibitive actions that must not be performed by the operator.
1. This symbol indicates that lethal accidents or serious injuries may occur if the operating and working instructions are not followed properly.
机械设计基础(英汉互译)
Fundamentals of Mechanical DesignMechanical design means the design of things and systems of things and systems of a mechanical nature-machines, products, structures, devices, and instruments. For the most part mechanical design utilizes mathematics, the materials sciences, and the engineering-mechanics sciences.The total design process is of interest to us. How does it begin? Does the engineer simply sit down at his desk with a blank sheet of paper? And, as he jots down some ideas, what happens next? What factors influence or control the decisions which have to be made? Finally, then, how does this design process end?Sometimes, but not always, design begins when an engineer recognizes a need and decides to do something about it. Recognition of the need phrasing it in so many words often constitute a highly creative act because the need may be only a vague discontent, a feeling of uneasiness, or a sensing that something is not right.The need is usually not evident at all. For example, the need to do something about a food-packaging machine may be indicated by the noise level, by the variation in package weight, and by slight but perceptible variations in the quality of the packaging or wrap.There is a distinct difference between the statement of the statement of the need and the identification of the problem which follows this statement. The problem is more specific. If the need is for cleaner air, the problem might be that of reducing the dust discharge from power-plant stacks, or reducing the quantity of irritants from automotive exhausts.Definition of the problem must include all the specifications for the thing that is to be designed. The specifications are the input and output quantities, the characteristics and dimensions of the space the thing must occupy and all the limitations on these quantities. We can regard the thing to be designed as something in a black box. In this case we must specify the inputs and outputs of the box together with their characteristics and limitations. The specifications define the cost, the number to be manufactured, the expected life, the range, the operating temperature, and the reliability.There are many implied specifications which result either from the designer’s particular environment or from the problem itself. The manufacturing processes which are available, together with the facilities of a certain plant, constitute restrictions on a designer’s freedom, and hence are a part of the implied specifications. A small plant, for instance, may not own cold-working machinery. Knowing this, the designer selects other metal-processing methods which can be performed in the plant. The labor skills available and the competitive situation also constitute implied specifications.After the problem has been defined and a set of written and implied specifications has been obtained, the next step in design is the synthesis of an optimum solution. Now synthesis cannot take place without both analysis and optimization because the system under design must be analysis and optimization because the system under design must be analyzed to determine whether the performance complies with the specifications.The design is an iterative process in which we proceed through several steps, evaluate the results, and then return to an earlier phase of the procedure. Thus we may synthesize several components of a system, analyze and optimize them, and return to syntheses to see what effect this has on the remaining parts of the system. Both analysis and optimization require that we construct or devise abstract models of the system which will admit some form of mathematical analysis. Wecall these models mathematical models. In creating them it is our hope that we can find one which will simulate the real physical system very well.Evaluation is a significant phase of the total design process. Evaluation is the final proof of a successful design, which usually involves the testing of a prototype in the laboratory. Here we wish to discover if the design really satisfies the need or needs. Is it reliable? will it compete successfully with similar products? Is it economical to manufacture and to use? Is it easily maintained and adjusted? Can a profit be made from its sale or use?Communicating the design to others is the final, vital step in the design process. Undoubtedly many great designs, inventions, and creative works have been lost to mankind simply because the originators were unable or unwilling to explain their accomplishments to others. Presentation is a selling job. The engineer, when presenting a new solution to administrative, management, or supervisory persons, is attempting to them that this solution is a better one. Unless this can be done successfully, the time and effort spent on obtaining the solution have been largely wasted.Basically, there are only three means of communication available to us. These are the written, the oral. And the graphical forms. Therefore the successful engineer will be technically competent and versatile in all three forms of communication. A technically competent person who lacks ability in any one of these forms is severely handicapped. If ability in all three forms is locking, no one will ever know how competent that person is!The competent engineer should not be afraid of the possibility of not succeeding in a presentation. In fact, occasional failure should be expected because failure or criticism seems to accompany every really creative idea. There is a great deal to be learned form a failure, and the greatest gains are obtained by those willing to risk defeat. In the final analysis, the real failure would lie in deciding not to make the presentation at all.机械设计基础机械设计是指机械装置和机械系统——机器、产品、结构、设备和仪器的设计。
机械设计大纲(双语版)要点
《机械设计》课程教学大纲《Mechanical design》Course syllabus制订人(Author):涂杰(Tu Jie)总学时数( total class time):56(45min/time)理论教学时数(Theory Teaching time):52 ;实验教学时数(experimental teaching time):4;学分(credit):4适用专业(suitable major): NC Technology一.课程的性质和作用(The task of the course)本课程是机械类专业的一门必修的专业基础课。
通过本课程的学习,为学生在今后的工作中解决机械设计问题打下一定基础,同时也为学生学习后继课程和新的科学技术提供必需的预备知识。
The course is a required professional basic course for mechanical engineering majors,through the course can lay a good foundation for the students to solve the problems of mechanical design.it can also provide the necessary preliminaries for the the successor curriculum.二.课程的基本内容(Basic content of the course)第1章绪论Chapter 1 introduction(1)机械设计研究对象、内容及在国民经济发展中的作用。
(1)research object、contents of the mechanical design.(2)机械、机器、机构及构件的概念。
(2)the conception of Mechanics and mechanism .第2章机械设计概论Chapter 2 Introduction to mechanical design(1)机械设计的基本要求。
机械设计(英文版)全册配套完整教学课件
3) Classification of Machine Elements
Energy absorber: brakes 制动器and dampers减震器 Supporting elements: shafts, springs弹簧, seals密封 Connection and joints: thread fasteners螺纹紧固件,
keys键, couplings联轴器
2) Composition of Machine
In terms of basic manufacturing unit, a machine is composed by machine elements/components.
In terms of the functions of the sub-system of a machine, it is comprised of the source-power, transmission, execution and control/manipulation parts.
belt) 汽车发动机(多楔带)
Machine design is the fundamental practice in engineering; is the transformation of concepts and ideas into useful machinery.
Machine design is the application of science and technology to devise new or improved products for the purpose of satisfying human needs.
机械设计作业英文版翻译
3-1 The symmetrical fluctuation strength of one material 1180MPa σ-=, critical number of cycles 60510N =⨯, 9m =, try to find bending fatigue limit respectively to number of stress cycles N as 7000, 25000, 620000.3-2 Try to draw the simplified fatigue strength diagram for ductile material as know 260s MPa σ=, 1170MPa σ-=, 0.2σφ=.3-3 One circular shaft has shaft shoulder with dimensions 72D mm =,62d mm =, 3r mm =.Material is 40CrNi, its 900B MPa σ=750s MPa σ=. Try to calculate k σ. 3-5 As to 3-4, dangerous section has mean stress 20m MPa σ=, stress amplitude 30a MPa σ=, try to find the calculation factor of safety respectively according to ①r C =, ②m C σ=.5-6 One sideboard of the bracket is to be bolted to the bracket by means of 6 equal size bolts. A force is applied to the bracket; the direction of the force is parallel to the vertical symmetric axis of the sideboard bolts, distance 250mm , and magnitude 60KN . There are 2 kinds of bolts arrangement shown in Fig 5-50, suppose precision screws are used, which kind of arrangement use the smaller bolt diameter? Why?5-8 Two pieces metal sheep are connected by two M12 bolts. Supposed friction coefficient of joint surface 0.3f =, preload of the bolt is controlled to 70% of the yield limit. The bolt is made of grade 4.8 medium carbon steel. What maximum transverse load can the connection supply?5-9 受轴向载荷的紧螺栓连接,被连接钢板中间采用橡胶垫片。
机械工程导论翻译第三章
3.1 OVERVIEWAs introduced in Chapter 1,the primary objective of mechanical engineers is to make machines that work, that are useful, and that improve society in some way. Machines in general,and power transmission equipment in particular, are often constructed of standardized components or "building blocks."Just as an electrical engineer might select off-the-shelf resistors,capacitors,and transistors as the elements of a circuit。
mechanical engineers have good intuition for specifying the different available types ofbearing ,shafts ,gears,belts and other components in theirdesigns.Once the details of a machine have been worked out and the components for it have been selected ,the product then needs to be built.Mechanical engineers also devise manufacturing and assembly processes,and at the conclusion of this chapter we will introduce several common machine tools.A solid appreciation of machine components and tools is valuable at three levels.First,and from our primary standpoint in this textbook,a working knowledge of this hardware is important for you to develop a technical vocabulary!Mechanical engineering has its own precise language,and specialized terms are used to describe the construction and operation of machines.To communicate effectivelywith other engineers,you will need to learn,adopt,and share that language.Second,having such a background is necessary to select the poper component for an application and to specify the appropriate machine tool for a production process.Of course,it is not possible to list and describe every machine and component that embodies mechanical engineering principles,and that is not our intention in this chapter.However,by examining just a few machine components and tools,you will develop a growing appreciation for practical machinery issues.Finally,this chapter is a good place for you to begin the journey of understanding the inner workings of mechanical hardware.It's intellectually healthy for you to be curious about machines,wonder how they were made,dissect them,and think about they could have been made differently or better .3.1概述正如第1章介绍,机械工程师的首要目标是制造机器,制造能够工作的、有用的并以某种方式,改善社会的机器。
机械设计课程教材的中英文对照版本
机械设计Mechanical Designing机械设计基础Basis of Mechanical Designing机械设计课程设计Course Exercise in Mechanical Design机械设计原理Principle of Mechanical Designing机械式信息传输机构Mechanical Information Transmission Device机械原理Principle of Mechanics机械原理和机械零件Mechanism & Machinery机械原理及机械设计Mechanical Designing机械原理及应用Mechanical Principle & Mechanical Applications机械原理课程设计Course Exercise of Mechanical Principle机械原理与机械零件Mechanical Principle and Mechanical Elements机械原理与机械设计Mechanical Principle and Mechanical Design机械噪声控制Control of Mechanical Noise机械制造概论Introduction to Mechanical Manufacture机械制造工艺学Technology of Mechanical Manufacture机械制造基础Fundamental of Mechanical Manufacture机械制造基础(金属工艺学) Fundamental Course of Mechanic Manufacturing (Meta机械制造系统自动化Automation of Mechanical Manufacture System机械制造中计算机控制Computer Control in Mechanical Manufacture机械制图Mechanical Drawing可编程序控制技术Controlling Technique for Programming金工实习Metal Working Practice毕业实习Graduation Practice理论力学Theoretical Mechanics材料力学Material Mechanics数字电子电路Fundamental Digital Circuit机械控制工程Mechanical Control Engineering可靠性工程Reliability Engineering机械工程测试技术Measurement Techniques of Mechanic Engineering计算机控制系统Computer Control System机器人技术基础Fundamentals of Robot Techniques最优化技术Techniques of Optimum工程测试与信号处理Engineering Testing & Signal Processing金属工艺及设计Metal Technics & Design机械工业企业管理Mechanic Industrial Enterprise Management机械零件课程设计Course Design of Machinery Elements投资经济学Investment Economics现代企业管理Modern Enterprise Administration市场营销学Market Selling生产实习Production Practice课程设计Course Exercise有限元法FInite Element金工实习Metalworking Practice液压传动Hydraulic Transmission微机原理及接口技术Principle & Interface Technique of Micro-computer 微机原理及接口技术Principle & Interface Technique of Micro-computer数控技术Digit Control Technique活塞膨胀机Piston Expander活塞式制冷压缩机Piston Refrigerant Compreessor活塞式压缩机Piston Compressor活塞式压缩机基础设计Basic Design of Piston Compressor活塞压缩机结构强度Structural Intensity of Piston Compressor活赛压机气流脉动Gas Pulsation of Piston Pressor货币银行学Currency Banking基本电路理论Basis Theory of Circuit基础写作Fundamental Course of Composition机床电路Machine Tool Circuit机床电器Machine Tool Electric Appliance机床电气控制Electrical Control of Machinery Tools机床动力学Machine Tool Dynamics机床设计Machine Tool design机床数字控制Digital Control of Machine Tool机床液压传动Machinery Tool Hydraulic Transmission机电传动Mechanical & Electrical Transmission机电传动控制Mechanical & electrical Transmission Control机电耦合系统Mechanical & Electrical Combination System机电系统计算机仿真Computer Simulation of Mechanic/Electrical Systems机电一体化Mechanical & Electrical Integration机构学Structuring机器人Robot机器人控制技术Robot Control Technology机械产品学Mechanic Products机械产品造型设计Shape Design of Mechanical Products机械工程控制基础Basic Mechanic Engineering Control机械加工自动化Automation in Mechanical Working机械可靠性Mechanical Reliability机械零件Mechanical Elements机械零件设计Course Exercise in Machinery Elements Design机械零件设计基础Basis of Machinery Elements Design互换性与技术测量Elementary Technology of Exchangeability Measurement焊接方法Welding Method焊接方法及设备Welding Method & Equipment焊接检验Welding Testing焊接结构Welding Structure焊接金相Welding Fractography焊接金相分析Welding Fractography Analysis焊接冶金Welding Metallurgy焊接原理Fundamentals of Welding焊接原理及工艺Fundamentals of Welding & Technology焊接自动化Automation of Welding工程材料的力学性能测试Mechanic Testing of Engineering Materials 工程材料及热处理Engineering Material and Heat Treatment工程材料学Engineering Materials工程测量Engineering Surveying工程测试技术Engineering Testing Technique工程测试实验Experiment on Engineering Testing工程测试信息Information of Engineering Testing工程动力学Engineering Dynamics工程概论Introduction to Engineering工程概预算Project Budget工程经济学Engineering Economics工程静力学Engineering Statics工程力学Engineering Mechanics工程热力学Engineering Thermodynamics工程项目评估Engineering Project Evaluation工程优化方法Engineering Optimizational Method工程运动学Engineering Kinematics工程造价管理Engineering Cost Management工程制图Graphing of Engineering电机学Electrical Motor 电机学及控制电机Electrical Machinery Control & Technology。
机械设计制造及其自动化-专业外语-Chapter Three Lesson 3 Introduction to Nonconventional
Байду номын сангаас
随着耐高温、高强度及高硬度材料在工程上日益广泛的应用。有必要开发 更多的新加工技术。常规加工方法不适用于加工这种新材料(磨削除外), 即便这些方法可行,也是低效的。虽然大多数新加工方法是专门为难加工 材料开发的。但其中一些方法只用于材料硬度不高,加工较容易的复杂型 腔。 这篇文章描述主要的特种加工方法。这些方法更详细内容及其它方法可在 其他方面查找。 特种加工取代传统加工原因如下。
Chapter Three Conventional Nonconventional Machining 第三章 特种加工 Lesson 3 Introduction to Nonconventional Machining Processes 第三课 特种加工方法介绍
The recent increase in the use of hard, high-strength, and temperature-resistant materials in engineering has made it necessary to develop many new machining techniques. With the exception of grinding, conventional methods of removing material from a workpiece are not readily applicable to these new materials. Even when such machining is possible, it is usually slow and highly inefficient. Although most of the new machining processes have been developed specifically for materials that are difficult to machine, some of them have found use in the production of complex shapes and cavities in softer, more readily machined materials. Descriptions of the main nonconventional machining processes are given in this chapter. More detailed descriptions of these processed and several others can be found elsewhere. Nonconventional machining processes may be used as alternatives to the more traditional processes for a number of reasons, including the following.
机械类专业英语应用Unit 3
多功能的;多用途的,通用的 批量生产 预先假定;以…为先决条件;意味着 增强,扩大;增加,补充物 目击者,见证人;出席或知道;见证 汽轮机;涡轮机;透平机 学到;获得,取得 可靠,可信赖
words and expressions
• sophisticated [səˈfistikeitid] adj.& v.
训练,使有条理;纪律;学科;训练 分支 围绕,包围;包含;完成 专门的; 专业的;专用的 <前缀>许多的,多的 生物学;生物 基础设施;基础建设 电路
words and expressions
• motor [ˈməutə(r)] n.& vi.& vt. • electromagnetic [iˌlektrəumægˈnetik] adj. • electromechanical [i'lektrəumi'kænikəl] adj. • optical fibers • optoelectronic [ɔptəuilek'trɔni] adj. • telecommunication [ˌtelikəˌmju:ni'keiʃn] n. • instrumentation [ˌinstrəmenˈteiʃn] n. • macroscopic [ˌmækrə'skɔpik] adj.
细致的 研讨会; 研讨班, 讲习会; 培训会 车间; 专题讨论会, 研究会 并排; 并列, 并肩地; 不落后于 暂时解雇,裁员; 停止工作 丰满的; 多才多艺的; 面面俱到的 专门知识或技能;专家意见,评价 图表;排行榜;绘制地图; 记录; 记述
words and expressions
• engineering drawings • memoranda [ˌmeməˈrændə] n. • executive [igˈzekjətiv] n.& adj.
机械设计中英文手册
陶瓷ceramics合成纤维synthetic fibre电化学腐蚀electrochemical corrosion 车架automotive chassis悬架suspension转向器redirector变速器speed changer板料冲压sheet metal parts孔加工spot facing machining车间workshop工程技术人员engineer气动夹紧pneuma lock数学模型mathematical model画法几何descriptive geometry机械制图Mechanical drawing投影projection视图view剖视图profile chart标准件standard component零件图part drawing装配图assembly drawing尺寸标注size marking技术要求technical requirements刚度rigidity内力internal force位移displacement截面section疲劳极限fatigue limit断裂fracture塑性变形plastic distortion脆性材料brittleness material刚度准则rigidity criterion垫圈washer垫片spacer直齿圆柱齿轮straight toothed spur gear 斜齿圆柱齿轮helical-spur gear直齿锥齿轮straight bevel gear运动简图kinematic sketch齿轮齿条pinion and rack蜗杆蜗轮worm and worm gear虚约束passive constraint曲柄crank摇杆racker凸轮cams共轭曲线conjugate curve范成法generation method定义域definitional domain值域range导数\\微分differential coefficient求导derivation定积分definite integral不定积分indefinite integral曲率curvature偏微分partial differential毛坯rough游标卡尺slide caliper千分尺micrometer calipers攻丝tap二阶行列式second order determinant逆矩阵inverse matrix线性方程组linear equations概率probability随机变量random variable排列组合permutation and combination气体状态方程equation of state of gas动能kinetic energy势能potential energy机械能守恒conservation of mechanical energy动量momentum桁架truss轴线axes余子式cofactor逻辑电路logic circuit触发器flip-flop脉冲波形pulse shape数模digital analogy液压传动机构fluid drive mechanism机械零件mechanical parts淬火冷却quench淬火hardening回火tempering调质hardening and tempering磨粒abrasive grain结合剂bonding agent砂轮grinding wheel后角clearance angle龙门刨削planing主轴spindle主轴箱headstock卡盘chuck加工中心machining center车刀lathe tool车床lathe钻削镗削bore车削turning磨床grinder基准benchmark钳工locksmith锻forge压模stamping焊weld拉床broaching machine拉孔broaching装配assembling铸造found流体动力学fluid dynamics流体力学fluid mechanics加工machining液压hydraulic pressure切线tangent机电一体化mechanotronics mechanical-electrical integration 气压air pressure pneumatic pressure稳定性stability介质medium液压驱动泵fluid clutch液压泵hydraulic pump阀门valve失效invalidation强度intensity载荷load应力stress安全系数safty factor可靠性reliability螺纹thread螺旋helix键spline销pin滚动轴承rolling bearing滑动轴承sliding bearing弹簧spring制动器arrester brake十字结联轴节crosshead联轴器coupling链chain皮带strap精加工finish machining粗加工rough machining变速箱体gearbox casing腐蚀rust氧化oxidation磨损wear耐用度durability随机信号random signal离散信号discrete signal超声传感器ultrasonic sensor集成电路integrate circuit挡板orifice plate残余应力residual stress套筒sleeve扭力torsion冷加工cold machining电动机electromotor汽缸cylinder过盈配合interference fit热加工hotwork摄像头CCD camera倒角rounding chamfer优化设计optimal design工业造型设计industrial moulding design有限元finite element滚齿hobbing插齿gear shaping伺服电机actuating motor铣床milling machine钻床drill machine镗床boring machine步进电机stepper motor丝杠screw rod导轨lead rail组件subassembly可编程序逻辑控制器Programmable Logic Controller PLC 电火花加工electric spark machining电火花线切割加工electrical discharge wire - cutting相图phase diagram热处理heat treatment固态相变solid state phase changes有色金属nonferrous metal陶瓷ceramics合成纤维synthetic fibre电化学腐蚀electrochemical corrosion车架automotive chassis悬架suspension转向器redirector变速器speed changer板料冲压sheet metal parts孔加工spot facing machining车间workshop工程技术人员engineer气动夹紧pneuma lock数学模型mathematical model画法几何descriptive geometry机械制图Mechanical drawing投影projection视图view剖视图profile chart标准件standard component零件图part drawing装配图assembly drawing尺寸标注size marking技术要求technical requirements刚度rigidity内力internal force位移displacement截面section疲劳极限fatigue limit断裂fracture塑性变形plastic distortion脆性材料brittleness material刚度准则rigidity criterion垫圈washer垫片spacer直齿圆柱齿轮straight toothed spur gear 斜齿圆柱齿轮helical-spur gear直齿锥齿轮straight bevel gear运动简图kinematic sketch齿轮齿条pinion and rack蜗杆蜗轮worm and worm gear虚约束passive constraint曲柄crank摇杆racker凸轮cams共轭曲线conjugate curve范成法generation method定义域definitional domain值域range导数\\微分differential coefficient求导derivation定积分definite integral不定积分indefinite integral曲率curvature偏微分partial differential毛坯rough游标卡尺slide caliper千分尺micrometer calipers攻丝tap二阶行列式second order determinant逆矩阵inverse matrix线性方程组linear equations概率probability随机变量random variable排列组合permutation and combination气体状态方程equation of state of gas动能kinetic energy势能potential energy机械能守恒conservation of mechanical energy 动量momentum桁架truss轴线axes余子式cofactor逻辑电路logic circuit触发器flip-flop脉冲波形pulse shape数模digital analogy液压传动机构fluid drive mechanism机械零件mechanical parts淬火冷却quench淬火hardening回火tempering调质hardening and tempering磨粒abrasive grain结合剂bonding agent砂轮grinding wheelAssembly line 组装线Layout 布置图Conveyer 流水线物料板Rivet table 拉钉机Rivet gun 拉钉枪Screw driver 起子Pneumatic screw driver 气动起子worktable 工作桌OOBA 开箱检查fit together 组装在一起fasten 锁紧(螺丝)fixture 夹具(治具)pallet 栈板barcode 条码barcode scanner 条码扫描器fuse together 熔合fuse machine热熔机repair修理operator作业员QC品管supervisor 课长ME 制造工程师MT 制造生技cosmetic inspect 外观检查inner parts inspect 内部检查thumb screw 大头螺丝lbs. inch 镑、英寸EMI gasket 导电条front plate 前板rear plate 后板chassis 基座bezel panel 面板power button 电源按键reset button 重置键Hi-pot test of SPS 高源高压测试Voltage switch of SPS 电源电压接拉键sheet metal parts 冲件plastic parts 塑胶件SOP 制造作业程序material check list 物料检查表work cell 工作间trolley 台车sub-line 支线left fork 叉车personnel resource department 人力资源部production department生产部门planning department企划部QC Section品管科stamping factory冲压厂painting factory烤漆厂molding factory成型厂common equipment常用设备uncoiler and straightener整平机punching machine 冲床robot机械手hydraulic machine油压机lathe车床planer |plein|刨床miller铣床grinder磨床linear cutting线切割electrical sparkle电火花welder电焊机staker=reviting machine铆合机position职务president董事长general manager总经理special assistant manager特助factory director厂长department director部长deputy manager | =vice manager副理section supervisor课长deputy section supervisor =vice section superisor副课长group leader/supervisor组长line supervisor线长assistant manager助理to move, to carry, to handle搬运be put in storage入库pack packing包装to apply oil擦油to file burr 锉毛刺final inspection终检to connect material接料to reverse material 翻料wet station沾湿台cleaning cloth抹布to load material上料to unload material卸料to return material/stock to退料scraped |\\'skr?pid|报废scrape ..v.刮;削deficient purchase来料不良manufacture procedure制程deficient manufacturing procedure制程不良oxidation |\\' ksi\\'dei?n|氧化scratch刮伤dents压痕defective upsiding down抽芽不良defective to staking铆合不良embedded lump镶块feeding is not in place送料不到位stamping-missing漏冲production capacity生产力education and training教育与训练proposal improvement提案改善spare parts=buffer备件forklift叉车trailer=long vehicle拖板车compound die合模die locker锁模器pressure plate=plate pinch压板bolt螺栓administration/general affairs dept总务部automatic screwdriver电动启子thickness gauge厚薄规gauge(or jig)治具power wire电源线buzzle蜂鸣器defective product label不良标签identifying sheet list标示单location地点present members出席人员subject主题conclusion结论decision items决议事项responsible department负责单位pre-fixed finishing date预定完成日approved by / checked by / prepared by核准/审核/承办PCE assembly production schedule sheet PCE组装厂生产排配表model机锺work order工令revision版次remark备注production control confirmation生产确认checked by初审approved by核准department部门stock age analysis sheet 库存货龄分析表on-hand inventory现有库存available material良品可使用obsolete material良品已呆滞to be inspected or reworked 待验或重工total合计cause description原因说明part number/ P/N 料号type形态item/group/class类别quality品质prepared by制表notes说明year-end physical inventory difference analysis sheet 年终盘点差异分析表physical inventory盘点数量physical count quantity帐面数量difference quantity差异量cause analysis原因分析raw materials原料materials物料finished product成品semi-finished product半成品packing materials包材good product/accepted goods/ accepted parts/good parts良品defective product/non-good parts不良品disposed goods处理品warehouse/hub仓库on way location在途仓oversea location海外仓spare parts physical inventory list备品盘点清单spare molds location模具备品仓skid/pallet栈板tox machine自铆机wire EDM线割EDM放电机coil stock卷料sheet stock片料tolerance工差score=groove压线cam block滑块pilot导正筒trim剪外边pierce剪内边drag form压锻差pocket for the punch head挂钩槽slug hole废料孔feature die公母模expansion dwg展开图radius半径shim(wedge)楔子torch-flame cut火焰切割set screw止付螺丝form block折刀stop pin定位销round pierce punch=die button圆冲子shape punch=die insert异形子stock locater block定位块under cut=scrap chopper清角active plate活动板baffle plate挡块cover plate盖板male die公模female die母模groove punch压线冲子air-cushion eject-rod气垫顶杆spring-box eject-plate弹簧箱顶板bushing block衬套insert 入块club car高尔夫球车capability能力parameter参数factor系数phosphate皮膜化成viscosity涂料粘度alkalidipping脱脂main manifold主集流脉bezel斜视规blanking穿落模dejecting顶固模demagnetization去磁;消磁high-speed transmission高速传递heat dissipation热传rack上料degrease脱脂rinse水洗alkaline etch龄咬desmut剥黑膜D.I. rinse纯水次Chromate铬酸处理Anodize阳性处理seal封孔revision版次part number/P/N料号good products良品scraped products报放心品defective products不良品finished products成品disposed products处理品barcode条码flow chart流程表单assembly组装stamping冲压molding成型spare parts=buffer备品coordinate座标dismantle the die折模auxiliary fuction辅助功能poly-line多义线heater band 加热片thermocouple热电偶sand blasting喷沙grit 砂砾derusting machine除锈机degate打浇口dryer烘干机induction感应induction light感应光response=reaction=interaction感应ram连杆edge finder巡边器concave凸convex凹short射料不足nick缺口speck瑕??splay 银纹gas mark焦痕delamination起鳞cold slug冷块blush 导色gouge沟槽;凿槽satin texture段面咬花witness line证示线patent专利grit沙砾granule=peuet=grain细粒grit maker抽粒机cushion缓冲magnalium镁铝合金magnesium镁金metal plate钣金lathe车mill锉plane刨grind磨drill铝boring镗blinster气泡fillet镶;嵌边through-hole form通孔形式voller pin formality滚针形式cam driver铡楔shank摸柄crank shaft曲柄轴augular offset角度偏差velocity速度production tempo生产进度现状torque扭矩spline=the multiple keys花键quenching淬火tempering回火annealing退火carbonization碳化tungsten high speed steel钨高速的moly high speed steel钼高速的organic solvent有机溶剂bracket小磁导liaison联络单volatile挥发性ion离子titrator滴定仪beacon警示灯coolant冷却液crusher破碎机阿基米德蜗杆Archimedes worm安全系数safety factor; factor of safety安全载荷safe load凹面、凹度concavity扳手wrench板簧flat leaf spring半圆键woodruff key变形deformation摆杆oscillating bar摆动从动件oscillating follower摆动从动件凸轮机构cam with oscillating follower 摆动导杆机构oscillating guide-bar mechanism 摆线齿轮cycloidal gear摆线齿形cycloidal tooth profile摆线运动规律cycloidal motion摆线针轮cycloidal-pin wheel包角angle of contact保持架cage背对背安装back-to-back arrangement背锥back cone ;normal cone背锥角back angle背锥距back cone distance比例尺scale比热容specific heat capacity闭式链closed kinematic chain闭链机构closed chain mechanism臂部arm变频器frequency converters变频调速frequency control of motor speed变速speed change变速齿轮change gear change wheel变位齿轮modified gear变位系数modification coefficient标准齿轮standard gear标准直齿轮standard spur gear表面质量系数superficial mass factor表面传热系数surface coefficient of heat transfer 表面粗糙度surface roughness并联式组合combination in parallel并联机构parallel mechanism并联组合机构parallel combined mechanism并行工程concurrent engineering并行设计concurred design, CD不平衡相位phase angle of unbalance不平衡imbalance (or unbalance)不平衡量amount of unbalance不完全齿轮机构intermittent gearing波发生器wave generator波数number of waves补偿compensation参数化设计parameterization design, PD残余应力residual stress操纵及控制装置operation control device槽轮Geneva wheel槽轮机构Geneva mechanism ;Maltese cross槽数Geneva numerate槽凸轮groove cam侧隙backlash差动轮系differential gear train差动螺旋机构differential screw mechanism差速器differential常用机构conventional mechanism; mechanism in common use 车床lathe承载量系数bearing capacity factor承载能力bearing capacity成对安装paired mounting尺寸系列dimension series齿槽tooth space齿槽宽spacewidth齿侧间隙backlash齿顶高addendum齿顶圆addendum circle齿根高dedendum齿根圆dedendum circle齿厚tooth thickness齿距circular pitch齿宽face width齿廓tooth profile齿廓曲线tooth curve齿轮gear齿轮变速箱speed-changing gear boxes齿轮齿条机构pinion and rack齿轮插刀pinion cutter; pinion-shaped shaper cutter 齿轮滚刀hob ,hobbing cutter齿轮机构gear齿轮轮坯blank齿轮传动系pinion unit齿轮联轴器gear coupling齿条传动rack gear齿数tooth number齿数比gear ratio齿条rack齿条插刀rack cutter; rack-shaped shaper cutter齿形链、无声链silent chain齿形系数form factor齿式棘轮机构tooth ratchet mechanism插齿机gear shaper重合点coincident points重合度contact ratio冲床punch传动比transmission ratio, speed ratio传动装置gearing; transmission gear传动系统driven system传动角transmission angle传动轴transmission shaft串联式组合combination in series串联式组合机构series combined mechanism串级调速cascade speed control创新innovation creation创新设计creation design垂直载荷、法向载荷normal load唇形橡胶密封lip rubber seal磁流体轴承magnetic fluid bearing从动带轮driven pulley从动件driven link, follower从动件平底宽度width of flat-face从动件停歇follower dwell从动件运动规律follower motion从动轮driven gear粗线bold line粗牙螺纹coarse thread大齿轮gear wheel打包机packer打滑slipping带传动belt driving带轮belt pulley带式制动器band brake单列轴承single row bearing单向推力轴承single-direction thrust bearing单万向联轴节single universal joint单位矢量unit vector当量齿轮equivalent spur gear; virtual gear当量齿数equivalent teeth number; virtual number of teeth当量摩擦系数equivalent coefficient of friction当量载荷equivalent load刀具cutter导数derivative倒角chamfer导热性conduction of heat导程lead导程角lead angle等加等减速运动规律parabolic motion; constant acceleration and deceleration motion 等速运动规律uniform motion; constant velocity motion等径凸轮conjugate yoke radial cam等宽凸轮constant-breadth cam等效构件equivalent link等效力equivalent force等效力矩equivalent moment of force等效量equivalent等效质量equivalent mass等效转动惯量equivalent moment of inertia等效动力学模型dynamically equivalent model底座chassis低副lower pair点划线chain dotted line(疲劳)点蚀pitting垫圈gasket垫片密封gasket seal碟形弹簧belleville spring顶隙bottom clearance定轴轮系ordinary gear train; gear train with fixed axes动力学dynamics动密封kinematical seal动能dynamic energy动力粘度dynamic viscosity动力润滑dynamic lubrication动平衡dynamic balance动平衡机dynamic balancing machine动态特性dynamic characteristics动态分析设计dynamic analysis design动压力dynamic reaction动载荷dynamic load端面transverse plane端面参数transverse parameters端面齿距transverse circular pitch端面齿廓transverse tooth profile端面重合度transverse contact ratio端面模数transverse module端面压力角transverse pressure angle锻造forge对称循环应力symmetry circulating stress对心滚子从动件radial (or in-line ) roller follower对心直动从动件radial (or in-line ) translating follower对心移动从动件radial reciprocating follower对心曲柄滑块机构in-line slider-crank (or crank-slider) mechanism 多列轴承multi-row bearing多楔带poly V-belt多项式运动规律polynomial motion多质量转子rotor with several masses惰轮idle gear额定寿命rating life额定载荷load ratingII 级杆组dyad发生线generating line发生面generating plane法面normal plane法面参数normal parameters法面齿距normal circular pitch法面模数normal module法面压力角normal pressure angle法向齿距normal pitch法向齿廓normal tooth profile法向直廓蜗杆straight sided normal worm法向力normal force反馈式组合feedback combining反向运动学inverse ( or backward) kinematics反转法kinematic inversion反正切Arctan范成法generating cutting仿形法form cutting方案设计、概念设计concept design, CD防振装置shockproof device飞轮flywheel飞轮矩moment of flywheel非标准齿轮nonstandard gear非接触式密封non-contact seal非周期性速度波动aperiodic speed fluctuation非圆齿轮non-circular gear粉末合金powder metallurgy分度线reference line; standard pitch line分度圆reference circle; standard (cutting) pitch circle 分度圆柱导程角lead angle at reference cylinder分度圆柱螺旋角helix angle at reference cylinder分母denominator分子numerator分度圆锥reference cone; standard pitch cone分析法analytical method封闭差动轮系planetary differential复合铰链compound hinge复合式组合compound combining复合轮系compound (or combined) gear train复合平带compound flat belt复合应力combined stress复式螺旋机构Compound screw mechanism复杂机构complex mechanism杆组Assur group干涉interference刚度系数stiffness coefficient刚轮rigid circular spline钢丝软轴wire soft shaft刚体导引机构body guidance mechanism刚性冲击rigid impulse (shock)刚性转子rigid rotor刚性轴承rigid bearing刚性联轴器rigid coupling高度系列height series高速带high speed belt高副higher pair格拉晓夫定理Grashoff`s law根切undercutting公称直径nominal diameter高度系列height series功work工况系数application factor工艺设计technological design工作循环图working cycle diagram工作机构operation mechanism工作载荷external loads工作空间working space工作应力working stress工作阻力effective resistance工作阻力矩effective resistance moment公法线common normal line公共约束general constraint公制齿轮metric gears功率power功能分析设计function analyses design共轭齿廓conjugate profiles共轭凸轮conjugate cam构件link鼓风机blower固定构件fixed link; frame固体润滑剂solid lubricant关节型操作器jointed manipulator惯性力inertia force惯性力矩moment of inertia ,shaking moment 惯性力平衡balance of shaking force惯性力完全平衡full balance of shaking force惯性力部分平衡partial balance of shaking force 惯性主矩resultant moment of inertia惯性主失resultant vector of inertia冠轮crown gear广义机构generation mechanism广义坐标generalized coordinate轨迹生成path generation轨迹发生器path generator滚刀hob滚道raceway滚动体rolling element滚动轴承rolling bearing滚动轴承代号rolling bearing identification code 滚针needle roller滚针轴承needle roller bearing滚子roller滚子轴承roller bearing滚子半径radius of roller滚子从动件roller follower滚子链roller chain滚子链联轴器double roller chain coupling滚珠丝杆ball screw滚柱式单向超越离合器roller clutch过度切割undercutting函数发生器function generator函数生成function generation含油轴承oil bearing耗油量oil consumption耗油量系数oil consumption factor赫兹公式H. Hertz equation合成弯矩resultant bending moment合力resultant force合力矩resultant moment of force黑箱black box横坐标abscissa互换性齿轮interchangeable gears花键spline滑键、导键feather key滑动轴承sliding bearing滑动率sliding ratio滑块slider环面蜗杆toroid helicoids worm环形弹簧annular spring缓冲装置shocks; shock-absorber灰铸铁grey cast iron回程return回转体平衡balance of rotors混合轮系compound gear train积分integrate机电一体化系统设计mechanical-electrical integration system design 机构mechanism机构分析analysis of mechanism机构平衡balance of mechanism机构学mechanism机构运动设计kinematic design of mechanism机构运动简图kinematic sketch of mechanism机构综合synthesis of mechanism机构组成constitution of mechanism机架frame, fixed link机架变换kinematic inversion机器machine机器人robot机器人操作器manipulator机器人学robotics技术过程technique process技术经济评价technical and economic evaluation技术系统technique system机械machinery机械创新设计mechanical creation design, MCD机械系统设计mechanical system design, MSD机械动力分析dynamic analysis of machinery机械动力设计dynamic design of machinery机械动力学dynamics of machinery机械的现代设计modern machine design机械系统mechanical system机械利益mechanical advantage机械平衡balance of machinery机械手manipulator机械设计machine design; mechanical design机械特性mechanical behavior机械调速mechanical speed governors机械效率mechanical efficiency机械原理theory of machines and mechanisms机械运转不均匀系数coefficient of speed fluctuation机械无级变速mechanical stepless speed changes基础机构fundamental mechanism基本额定寿命basic rating life基于实例设计case-based design,CBD基圆base circle基圆半径radius of base circle基圆齿距base pitch基圆压力角pressure angle of base circle基圆柱base cylinder基圆锥base cone急回机构quick-return mechanism急回特性quick-return characteristics急回系数advance-to return-time ratio急回运动quick-return motion棘轮ratchet棘轮机构ratchet mechanism棘爪pawl极限位置extreme (or limiting) position极位夹角crank angle between extreme (or limiting) positions计算机辅助设计computer aided design, CAD计算机辅助制造computer aided manufacturing, CAM计算机集成制造系统computer integrated manufacturing system, CIMS 计算力矩factored moment; calculation moment计算弯矩calculated bending moment加权系数weighting efficient加速度acceleration加速度分析acceleration analysis加速度曲线acceleration diagram尖底从动件knife-edge follower间隙backlash间歇运动机构intermittent motion mechanism 减速比reduction ratio减速齿轮、减速装置reduction gear减速器speed reducer减摩性anti-friction quality渐开螺旋面involute helicoid渐开线involute渐开线齿廓involute profile渐开线齿轮involute gear渐开线发生线generating line of involute渐开线方程involute equation渐开线函数involute function渐开线蜗杆involute worm渐开线压力角pressure angle of involute渐开线花键involute spline简谐运动simple harmonic motion键key键槽keyway交变应力repeated stress交变载荷repeated fluctuating load交叉带传动cross-belt drive交错轴斜齿轮crossed helical gears胶合scoring角加速度angular acceleration角速度angular velocity角速比angular velocity ratio角接触球轴承angular contact ball bearing角接触推力轴承angular contact thrust bearing 角接触向心轴承angular contact radial bearing 角接触轴承angular contact bearing铰链、枢纽hinge校正平面correcting plane接触应力contact stress接触式密封contact seal阶梯轴multi-diameter shaft结构structure结构设计structural design截面section节点pitch point节距circular pitch; pitch of teeth节线pitch line节圆齿厚thickness on pitch circle节圆直径pitch diameter节圆锥pitch cone节圆锥角pitch cone angle解析设计analytical design紧边tight-side紧固件fastener径节diametral pitch径向radial direction径向当量动载荷dynamic equivalent radial load径向当量静载荷static equivalent radial load径向基本额定动载荷basic dynamic radial load rating 径向基本额定静载荷basic static radial load tating径向接触轴承radial contact bearing径向平面radial plane径向游隙radial internal clearance径向载荷radial load径向载荷系数radial load factor径向间隙clearance静力static force静平衡static balance静载荷static load静密封static seal局部自由度passive degree of freedom矩阵matrix矩形螺纹square threaded form锯齿形螺纹buttress thread form矩形牙嵌式离合器square-jaw positive-contact clutch 绝对尺寸系数absolute dimensional factor绝对运动absolute motion绝对速度absolute velocity均衡装置load balancing mechanism抗压强度compression strength开口传动open-belt drive开式链open kinematic chain开链机构open chain mechanism可靠度degree of reliability可靠性reliability可靠性设计reliability design, RD空气弹簧air spring空间机构spatial mechanism空间连杆机构spatial linkage空间凸轮机构spatial cam空间运动副spatial kinematic pair空间运动链spatial kinematic chain空转idle宽度系列width series框图block diagram雷诺方程Reynolds‘s equation离心力centrifugal force离心应力centrifugal stress离合器clutch离心密封centrifugal seal理论廓线pitch curve理论啮合线theoretical line of action隶属度membership力force力多边形force polygon力封闭型凸轮机构force-drive (or force-closed) cam mechanism 力矩moment力平衡equilibrium力偶couple力偶矩moment of couple连杆connecting rod, coupler连杆机构linkage连杆曲线coupler-curve连心线line of centers链chain链传动装置chain gearing链轮sprocket sprocket-wheel sprocket gear chain wheel联组V 带tight-up V belt联轴器coupling shaft coupling两维凸轮two-dimensional cam临界转速critical speed六杆机构six-bar linkage龙门刨床double Haas planer轮坯blank轮系gear train螺杆screw螺距thread pitch螺母screw nut螺旋锥齿轮helical bevel gear螺钉screws螺栓bolts螺纹导程lead螺纹效率screw efficiency螺旋传动power screw螺纹thread (of a screw)螺旋副helical pair螺旋机构screw mechanism螺旋角helix angle螺旋线helix ,helical line绿色设计green design design for environment马耳他机构Geneva wheel Geneva gear马耳他十字Maltese cross脉动无级变速pulsating stepless speed changes脉动循环应力fluctuating circulating stress脉动载荷fluctuating load铆钉rivet迷宫密封labyrinth seal密封seal密封带seal belt密封胶seal gum密封元件potted component密封装置sealing arrangement面对面安装face-to-face arrangement面向产品生命周期设计design for product`s life cycle, DPLC 名义应力、公称应力nominal stress模块化设计modular design, MD模块式传动系统modular system模幅箱morphology box模糊集fuzzy set模糊评价fuzzy evaluation模数module摩擦friction摩擦角friction angle摩擦力friction force摩擦学设计tribology design, TD摩擦阻力frictional resistance摩擦力矩friction moment摩擦系数coefficient of friction摩擦圆friction circle磨损abrasion wear; scratching末端执行器end-effector目标函数objective function耐腐蚀性corrosion resistance耐磨性wear resistance挠性机构mechanism with flexible elements挠性转子flexible rotor内齿轮internal gear内力internal force内圈inner ring能量energy能量指示图viscosity逆时针counterclockwise (or anticlockwise)啮出engaging-out啮合engagement, mesh, gearing啮合点contact points啮合角working pressure angle啮合线line of action啮合线长度length of line of action啮入engaging-in牛头刨床shaper凝固点freezing point; solidifying point扭转应力torsion stress扭矩moment of torque扭簧helical torsion spring诺模图NomogramO 形密封圈密封O ring seal盘形凸轮disk cam盘形转子disk-like rotor抛物线运动parabolic motion疲劳极限fatigue limit疲劳强度fatigue strength偏置式offset偏( 心) 距offset distance偏心率eccentricity ratio偏心质量eccentric mass偏距圆offset circle偏心盘eccentric偏置滚子从动件offset roller follower偏置尖底从动件offset knife-edge follower偏置曲柄滑块机构offset slider-crank mechanism 拼接matching评价与决策evaluation and decision频率frequency平带flat belt平带传动flat belt driving平底从动件flat-face follower平底宽度face width平分线bisector平均应力average stress平均中径mean screw diameter平均速度average velocity平衡balance平衡机balancing machine平衡品质balancing quality平衡平面correcting plane平衡质量balancing mass平衡重counterweight平衡转速balancing speed平面副planar pair, flat pair平面机构planar mechanism平面运动副planar kinematic pair平面连杆机构planar linkage平面凸轮planar cam平面凸轮机构planar cam mechanism平面轴斜齿轮parallel helical gears普通平键parallel key其他常用机构other mechanism in common use起动阶段starting period启动力矩starting torque气动机构pneumatic mechanism奇异位置singular position起始啮合点initial contact , beginning of contact气体轴承gas bearing千斤顶jack嵌入键sunk key强迫振动forced vibration切齿深度depth of cut曲柄crank曲柄存在条件Grashoff`s law曲柄导杆机构crank shaper (guide-bar) mechanism曲柄滑块机构slider-crank (or crank-slider) mechanism 曲柄摇杆机构crank-rocker mechanism曲齿锥齿轮spiral bevel gear曲率curvature曲率半径radius of curvature曲面从动件curved-shoe follower曲线拼接curve matching曲线运动curvilinear motion曲轴crank shaft驱动力driving force驱动力矩driving moment (torque)全齿高whole depth权重集weight sets球ball。
机械工程专业英语 第三课文及阅读资料
Lesson 3 gearsGears are toothed ,cylindrical wheels used for transmitting motion and power from one rotating shaft to another .the teeth of a driving gear mesh accurately in the spaces between teeth on the driven gear. The driving teeth push on the driven teeth , exerting a force perpendicular to the radius of the gear . Thus ,a torque is transmitted ,and because the gear is rotating ,power is also transmitted.1,spur gear geometry involute tooth formThe most widely used spur gear tooth form is the full-depth involute form .its characteristic shape is shown in figure 1.4The involute is one of a class of geometric curves called conjugate curves . when two such gear teeth are in mesh and rotating , there is a constant angular velocity ratio between them .from the moment of initial contact to the moment of disengagement ,the speed of the driving gear is in a constant proportion to the speed of the driven gear .the resulting action of the two gears is very smooth . otherwise these would be speeding up or slowing down during the engagement , with the resulting accelerations causing vibration, noise , and dangerous torsional oscillations in the system.An involute curve by taking a cylinder and wrapping a string around its circumference can be seen . tie a pencil to the end of the string .then start with the pencil tight against the cylinder ,and hold the string taut .move the pencil away from the cylinder while keeping the string taut . the curve drawed is an involuteThe circle represented by the cylinder is called the base circle . notice that at any position on the curve , the string represents a line tangent to the base circle and ,at the same time , perpendicular to the involute . drawing another base circle along the same centerline in such a position that the resulting involute is tangent to the first one ,it demonstrates that at the point of contact, the two lines tangent to the base circles are coincident and will stay in the same position as the base circles rotate . this is what happens when two gear teeth are in mesh .It is a fundamental principle of kinematics, the study of motion, that if the line drawn perpendicular to the surfaces of two rotating bodies at the point of contact always crosses the centerline between the two bodies at the same place , the angular velocity ratio of the two bodies will be constant . this is a statement of gearing .as demonstrated here ,the gear teeth made in the involute-tooth form obey the law.2,helical gear geometryHelical and spur gears are distinguished by the orientation of their teeth .on spur gears ,the teeth are straight and are aligned with the axis of the gear .on helical gears , the teeth are inclined at an angle with the axis, that angle being called the helix angle. If the gear was very wide ,it would appear that the teeth wind around the gear blank in acontinuous , helical path . however , practical considerations limit the width of the gears so that the teeth normally appear to be merely inclined with respect to the axis .figure 1.5 shows two examples of commercially available helical gears.The form of helical gear teeth are very similar to those discussed for spur gears . the basic task is to account for the effect of the helix angle .3,helix angleThe helix for a given gear can be either left-hand or right-hand . the teeth of a right-hand helical gear would appear to lean to the right when the gear is lying on a flat surface . conversely , the teeth of a left-hand helical gear would lean to the left . in normal installation , helical gears would be mounted on parallel shafts . to achieve this arrangement ,it is required that one gear should be of the right-hand design and that the other be left-hand with an equal helix angle .if both gears in mesh are of the same hand ,the shafts will be at 90 degrees to each other . such gears are called crossed helical gears.The parallel shaft arrangement for helical gears is preferred because it results in a much higher power-transmitting capacity for a given size of gear than the crossed helical arrangement .The main advantage of helical gears over spur gears is smoother engagement because a given tooth assumes its load gradually instead of suddenly .contact starts at one end of a tooth near the tip andprogresses across the face in a path downward across the pitch line to the lower flank of the tooth , where it leaves engagement .simultaneously , other teeth are coming into engagement before a given tooth leaves engagement , with the result that a larger average number of teeth are engaged and are sharing the applied loads compared with a spur gear . the lower average load per tooth allows a greater power transmission capacity for a given size of gear , or a smaller gear can be designed to carry the same power .The main disadvantage of helical gears is that an axial thrust load is produced as a natural result of the inclined arrangement of the teeth. The bearings that hold the shaft carrying the helical gear must be capable of reacting against the thrust load.Reading materialTypes of gearsSeveral kinds of gears having different tooth geometries are in common use . the acquaint you with the general appearance of some , their basic descriptions are given here .Spur gears have teeth that are straight and arranged parallel to the axis of the shaft that carries the gear . the curved shape of the faces of the spur gear teeth has a special geometry called an involute curve . this shape makes it possible for two gears to operate together withsmooth, positive transmission of power .The teeth of helical gears are arranged so that they lie at an angle with respect to the axis of the shaft . the angle ,called the helix angle ,can be virtually any angle . typical helix angle range from approximately 10 to 30 ,but angles up to 45 are practical .the helical teeth operate more smoothly than equivalent spur gear teeth ,and stresses are lower. Therefore ,a smaller helical gear can be designed for a given power-transmitting capacity than a spur gear. One of the disadvantages of helical gears is that an axial force , called a thrust force ,is generated in addition to the driving force that acts tangent to the basic cylinder on which the teeth are arranged . the designer must consider the thrust force when selecting bearing that will hold the shaft during operation . shafts carrying helical gears are typically arranged parallel to each other .however ,a special design ,called crossed helical gears ,has 45 helix angles, and the shafts operate 90 to each other .Bevel gears have teeth that are arranged as elements on the surface of cone . the teeth of straight bevel gears appear to be similar to spur gear teeth ,but they are tapered , being wider at the outside and narrower at the top of the cone ,bevel gears typically operate on shafts that are 90 to each other .indeed ,this is often the reason for specifying bevel gears in a drive system ,specially designed bevel gears can operate on shafts that are at some angel other than 90. Whenbevel gears are made with teeth that form a helix angle similar to that in helical gears , they are called spiral bevel gears. They operate more smoothly than straight bevel gears and can be made smaller for a given power transmission capacity . when both bevel gears in a pair have the same number of teeth ,they are called miter gears and are used only to change the axes of the shaft to 90 degrees . no speed change occurs .A rack is a straight gear that moves linearly instead of rotating . when a circular gear is mated with a rack , the combination is called a rack and pinion drive . you may have heart that term applied to the steering mechanism of a car or to a part of other machinery .A worm and its mating worm gear operate on shafts that are at90 degrees to each other . they typically accomplish a rather large speed reduction ratio compared with other types of gears . the worm is the driver ,and the worm gear is the driven gear. The teeth on the worm appear similar to screw threads, and , indeed , they are often called threads rather than teeth . the teeth of the worm gear can be straight like spur gear teeth ,or they can be helical. Often the shape of the tip of the worm gear teeth is enlarged to partially wrap around the threads of the worm to improve the power transmission capacity of the set . one disadvantage of the worm / worm gear drive is that it has a somewhat lower mechanical efficiency than most other kinds of gears because there is extension rubbing contact between the surfaces of the wormthreads and the sides of the worm gear teeth.Think of examples of gears in actual equipment . describe the operation of the equipment , particularly the power transmission system . sometimes ,of course ,the gears and the shafts are enclosed in housing , making it difficult for you to observe the actual gears. Perhaps you can find a manual for the equipment that shows the drive system. Try to answer the following questions:(1)What was the source of the power ,an electric motor, a gasolineengine , a steam turbine , or a hydraulic motor ?were the gears operated by hand?(2) How were the gears arranged together, and how were they attachedto the driving source and the driven machine?(3)Was there a speed change ? can you determine how much of achange ?(4)Were there more than two gears operated by hand ?(5)What types of gears were used?(6)What materials were gears made from ?(7)How were the gears attached to the shafts that supported them ?(8)Were the shafts for mating gears aligned parallel to each other ,orwere they perpendicular to one another ?(9)How were the shafts themselves supported ?(10)Was the gear transmission system enclosed in housing?。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
In which: vBA=lAB, vBA Direction:⊥AB,along with ω
anBA=lABw2, anBA Direction:B→A。 atBA=lABa, atBA Direction:⊥AB, along with a
第16页
1、The velocity and acceleration of the points on the same body Given:The length of all links in mechanism, position,
instant centerP12 or P21
第4页
Suppose that the positions of points A and B, the directions of VA2A1 and VB2B1 are known. VA2A1AP. VB2B1BP.
A 2 1
V A2A1 B V B2B1 P12
Summary and kernel Problems and Exercises
第2页
3.1 Tasks and Methods of Kinematic Analysis
Task: to find positions, velocities and accelerations or angular positions, angular velocities and angular accelerations.
1 , 1
Cal:
2 , 2 ,VC ,VE , aC , a E , 3 , 3
C
Sol: 1) Draw the kinematic diagram of the mechanism
2
Select a length suitable scale ul .
1 A 4
第17页
2 2 B 1 1 E 3 3 3 D (a)
第12页
Example2:For the following Slider-Crank Mechanism, Given: lAB, lBC,φ,ω1 ①locate all instant centers for the mechanism ②the velocity of follower link3 V3 。 Solution: (1) Find Instant centerP13 (2) Determine V3
第6页
3.2.2 Number of Instant Centers of a Mechanism
Each pair of links i and j has an instant centre and Pij is identical to Pji. Thus the number N of instant centres of a mechanism with k links is
Emphases★:
The method of instant centres, graphic method
Difficulties▲: Graphic method
第1页
3.1 Tasks and Methods of Kinematic Analysis
3.2 Velocity Analysis by the Method of instant Centers 3.3 Kinematic Analysis by Graphic Methods 3.4 Kinematic Analysis by Analytical Methods
第11页
(2) find the ratio ω2/ω4
P24 : the absolute velocities of which are the same, in both link2 and link 4.
vP24 l P12 P24 2 l P14 P24 4
i24 2 / 4 l P14 P24 / l P12 P24
第8页
2 1
(3) Higher Pair: Pure-rolling Pair
Instant center—the point of contact
(4)Higher Pair :rolling & sliding Pair Instant center—lies somewhere on the common normal through the point of contact
instant centerP12 One of bodies is static absolute instant center Both of them are moving relative instant center
第5页
Attention: instant center A pair of coincident points, the absolute velocities of which are the same, in both magnitude and direction. Relative velocity is zero.
k (k 1) k (k 1) N C 2! 2
2 k
k—number of links. The frame is included in the number k.
第7页
3.2.3 The location of the Instant Center of Two Links Connected by a Kinematic Pair
2
3
3 B P13
1
第10页
3.2.5 Applications of Instant Centers
Example1: The revolute four-bar linkage. (1) locate all instant centers for the mechanism
(2) find the ratio ω2/ω4
V P2 V P1 2 1 P12
At this instant, there is no relative velocity between this pair of coincident points. This pair of coincident points with the same velocities is defined as the instantaneous centre of relative rotation, denoted as P12 or P21.
v3 vP13 1 lP13P14
第13页
Example3 In the cam mechanism as shown in the following fig. the cam2 rotates anti-clockwise at a constant speed ω,Determine the velocity of the follower2 for the position shown.
(1) Revolute Pair
(2) Sliding Pair Instant center: lies at infinity in either direction perpendicular to the guide-way.
P12
Attention:The common normal may pass through any point !!
Chapter 3 Kinematic Analysis of Mechanisms
This chapter mainly introduces the tasks and methods of kinematic analysis. The method of instant centres, graphic and analytical methods are discussed.
Solution: (1) Find Instant center P23
P23must lie on the straight line connecting P12 and P13. P23 must lie along the common normal n-n through the point of contact C
P23
(2) Determine V3
v3 l P12 P23 2
第14页
3.2.6 Advantages and Disadvantages of the Method of Instant Centers
Excellent tool in simple mechanisms. Difficult to find Instant Center in a complex mechanism Not be used in acceleration analysis.
第3页
3.2 Velocity Analysis by the Method of instant Centres
3.2.1 Definition of the Instant Centre Shown in Fig. are two bodies 1 and 2 having relative planar motion. At any instant there exists a pair of coincident points, the absolute velocities of which are the same.
Methods: graphical method (图解法): 直观,精度不高 Instant(瞬时的) centre method for velocity Vector(矢量) equation method analytical method (解析法) : 精度高,计算烦琐