美国康耐视智能相机操作技巧使用说明
美国康耐视智能相机操作说明书
美国康耐视智能相机操作说明书
美国康耐视智能相机操作说明书
一:安装Insight Explorer 4.5.0 二:设置PC和相机在同一网段
三:连接相机
四:设置图像
五:定位部件
六:检测部件
七:通讯
八:保存作业
九:运行作业及联机
十:硬件接线
1.弹出“将传感器/设备调加到网络”对话框
2.选择相机,然后勾选“自动获得IP地址”
3.单击“应用”按钮,待弹出应用成功后,单击“关闭”按钮,显示如下画面
三:连接相机,双击相机“图标”,显
示Explorer编辑画面
四:设置图像
1.新建作业
2.设置图像
五:定位部件
1.选择“图案”工具
六:检测部件
1.选择“计数”>“斑点工具计数”
七:通讯
1.输出设置
2.单击“详细信息”设置输出脉冲宽度
八:保存作业,选择启动作业,勾选“联机模式下启动作业”
九:运行作业及联机
十:硬件接线
End。
康耐视相机操作手册
康耐视相机操作使用说明书文件状态:■草稿□修改□定稿文档密级□不保密■内部□机密项目名称版本号 1.0描述康耐视相机操作使用说明书编写人余国鹰编写日期2015/9/10 审核人审核日期目录一、康耐视相机具体设置 (3)1.1软件安装 ......................................................................................................... 错误!未定义书签。
1.2流程编辑 (3)1.3C ODESYS通信注意事项 (6)二、相机标定 (7)2.1相机校准 (7)2.2绝对坐标实现 (9)2.3相对坐标实现 (10)三、示教器示例程序 (11)3.1绝对坐标实现范例 (11)3.2相对坐标实现范例 (11)四、CODESYS逻辑开发 (13)4.1S OCKET通信开发 (13)4.2外部点数据处理 (14)五、细节说明 (17)康耐视相机操作使用说明书一、 康耐视相机具体设置1.1 软件安装双击康耐视相机软件Cognex_In-Sight_Software_4.8.1,按照步骤一步步安装即可。
1.2 流程编辑1. 设置电脑本地连接IPV4地址为192.168.39.12(设置为39段即可)。
2. 双击康耐视In-Sight 浏览器软件进入相机设置界面,软件会自动搜索连接的相机设备,如下图1.1所示。
图1.13. 双击相机设备(红色椭圆内设备图标),进入相机编辑界面,如下图1.2所示。
图1.2上海新时达机器人有限公司4. 在应用程序步骤中,开始、设置工具、配置结果、完成这4个步骤形成一个完整的相机操作流程;开始单击“开始”中“已连接”,如下图1.3所示,可以进行连接设备、断开设备、刷新、添加等操作。
图1.3单击“开始”中的“设置图像”,如下图1.4所示。
在“采集/加载图像”对话框中,“触发器”按钮是进行拍照,“实况视频”按钮是实时显示相机中的图像,“从PC加载图像”按钮是加载一张存在的图像。
美国康耐视智能相机操作技巧使用说明
美国康耐视智能相机操作说明书一:安装In sight Explorer 4.5.0 二:设置PC和相机在同一网段三:连接相机四:设置图像五:定位部件六:检测部件七:通讯八:保存作业九:运行作业及联机十:硬件接线COQNEX一:安装In sight Explorer4.5.0复制光盘的软件至PC硬盘,根据安装向导完成安装软件,安装成功,桌面出现Explored.5.0 图标,如下:设置相机和PC在同一网段1.双击软件,在菜单栏选择“系统” 将传感器/设备添加至网络”2.弹出“将传感器/设备调加到网络”对话框3.选择相机,然后勾选“自动获得IP地址”4.单击“应用”按钮,待弹出应用成功后,单击“关闭”按钮,显示如下画面三:连接相机,双击相机“图标”,显示Explorer编辑画面I IB—Si 耳h t 网貉XB- 2; In-5iglt 倍感器is&lOl」却甜臣四:设置图像1.新建作业2.设置图像相机下蝕发器証时C毫秒〉触发器间隔C壹秒)500^|B3E (壹秒)30.000^|五:定位部件1.选择“图案”工具六:检测部件1.选择“计数” > “斑点工具计数”、右 Bpi... 阈值鶴式 手动 ▼ 31点國值 ZJY 壬 斑点龍色 黒 审 边畀 jjbF ■當黑|蘇范園眼制 U-ioj 具“ 工1亲1 1 . 圏1010 Q a-点C1-点厂ax 交 案出案蘇点点色- 图pa 图曲边斑斑产*七:通讯1.输出设置角方閔 _f f l 图圈1010 口 E 1 点"1 ra '.M 真■■,]冥塢鱼总旦『 肛P4圏环囹边迪W 册颜*£ 跳金声■>■?!克■>■-•・2.单击“详细信息”设置输出脉冲宽度 八:保存作业,选择启动作业,勾选“联 机模式下启动作业” Ltl'< mt ■MLflfna | UP5 U4 LDET 1彌五載卜 却陌 h1剂科|L| AHH *. [|iMNM| IMWI.、 』Ml ft 亍圍憎-MU lir«El九:运行作业及联机0)耽机旨丨总|共|名称pu 山 讷Ti ib e Pi r右ng e «1 ■ 1 S Z I II111II。
康耐视DM7500说明书
康耐视DM7500说明书
一、康耐视相机DM7500具体设置
1.1软件安装
双击康耐视相机软件按照步骤一步步安装即可。
1.2流程编辑
1.设置电脑本地连接PV4地址为19
2.168.39.12(设置为39段即可)。
2.双击康耐视In-Sight浏览器软件进入相机设置界面,软件会自动搜索连接的相机设备。
3.双击相机设备进入相机编辑界面。
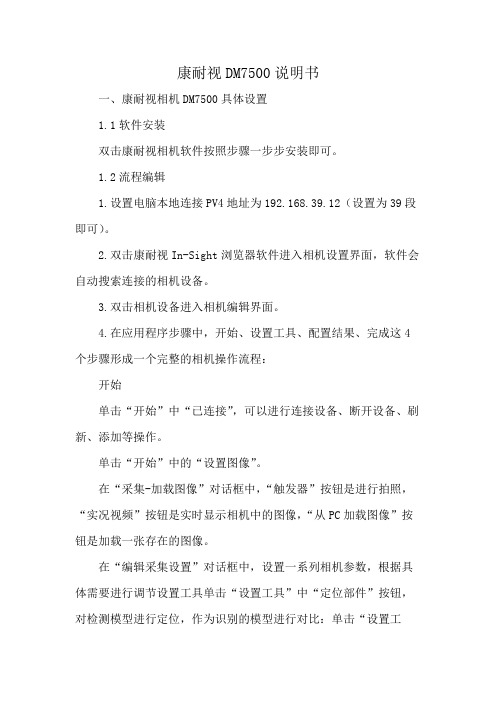
4.在应用程序步骤中,开始、设置工具、配置结果、完成这4个步骤形成一个完整的相机操作流程:
开始
单击“开始”中“已连接”,可以进行连接设备、断开设备、刷新、添加等操作。
单击“开始”中的“设置图像”。
在“采集-加载图像”对话框中,“触发器”按钮是进行拍照,“实况视频”按钮是实时显示相机中的图像,“从PC加载图像”按钮是加载一张存在的图像。
在“编辑采集设置”对话框中,设置一系列相机参数,根据具体需要进行调节设置工具单击“设置工具”中“定位部件”按钮,对检测模型进行定位,作为识别的模型进行对比:单击“设置工
具”中“检测部件”按钮,对模型进行编辑操作。
在“定位部件”的设置对话框中,合格阀值:每次拍照之后的得分如果大于阀值,则拍照成功,否则失败:旋转公差:检测部件能够旋转的角度范围,如果在范围之类则会拍照成功,否则会失败。
康耐视dm8050E说明书
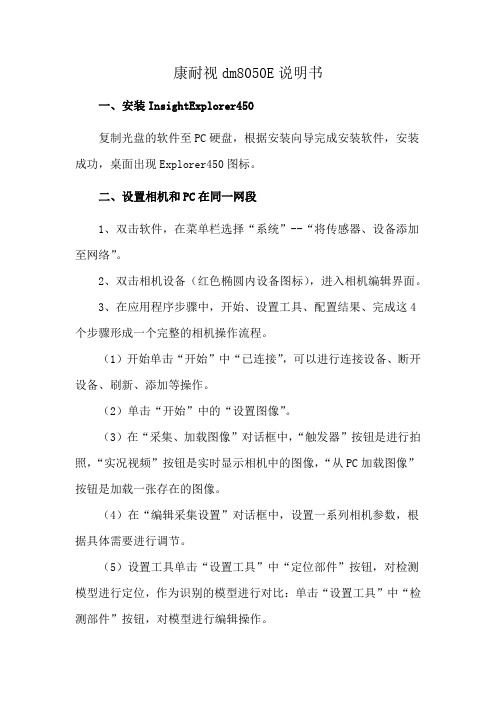
康耐视dm8050E说明书一、安装InsightExplorer450复制光盘的软件至PC硬盘,根据安装向导完成安装软件,安装成功,桌面出现Explorer450图标。
二、设置相机和PC在同一网段1、双击软件,在菜单栏选择“系统”--“将传感器、设备添加至网络”。
2、双击相机设备(红色椭圆内设备图标),进入相机编辑界面。
3、在应用程序步骤中,开始、设置工具、配置结果、完成这4个步骤形成一个完整的相机操作流程。
(1)开始单击“开始”中“已连接”,可以进行连接设备、断开设备、刷新、添加等操作。
(2)单击“开始”中的“设置图像”。
(3)在“采集、加载图像”对话框中,“触发器”按钮是进行拍照,“实况视频”按钮是实时显示相机中的图像,“从PC加载图像”按钮是加载一张存在的图像。
(4)在“编辑采集设置”对话框中,设置一系列相机参数,根据具体需要进行调节。
(5)设置工具单击“设置工具”中“定位部件”按钮,对检测模型进行定位,作为识别的模型进行对比:单击“设置工具”中“检测部件”按钮,对模型进行编辑操作。
(6)在“定位部件”的设置对话框中:合格阀值:每次拍照之后的得分如果大于阀值,则拍照成功,否则失败。
旋转公差:检测部件能够旋转的角度范围,如果在范围之类则会拍照成功,否则会失败。
4、配置结果单击“配置结果”中“通信”按钮,进行通讯设置操作。
新时达机器人视觉通信采用的TCPAP通讯方式,单击“TCPIP”,在“TCPAP设置”对话框中,“服务器主机名”设为(机器人控制器IP地址),“端口”设置与Codes vs中相同,本例中设为9876,“超时时间”设为15000,“结束符”设为字符串(CR13)。
5、单击“格式化输出字符串”,进行输出操作,勾选“使用分隔符”,表示在输出之间用逗号分隔符进行隔开,方便进行数据处理操作。
单击“添加”按钮,可以输出很多数据,这里只需要输出4个数据,“失败”“定位器X”“定位器Y”“定位器角度”。
Cognex康耐视相机操作使用说明书之欧阳德创编
康耐视相机操作使用说明书目录一、康耐视相机具体设置31.1软件安装错误!未定义书签。
1.2流程编辑31.3C ODESYS通信注意事项6二、相机标定72.1相机校准72.2绝对坐标实现92.3相对坐标实现10三、示教器示例程序113.1绝对坐标实现范例113.2相对坐标实现范例11四、CODESYS逻辑开发134.1S OCKET通信开发134.2外部点数据处理14五、细节说明17一、康耐视相机具体设置1.1软件安装双击康耐视相机软件Cognex_In-Sight_Software_4.8.1,按照步骤一步步安装即可。
1.2流程编辑1. 设置电脑本地连接IPV4地址为192.168.39.12(设置为39段即可)。
2. 双击康耐视In-Sight浏览器软件进入相机设置界面,软件会自动搜索连接的相机设备,如下图1.1所示。
图1.13. 双击相机设备(红色椭圆内设备图标),进入相机编辑界面,如下图1.2所示。
图1.24. 在应用程序步骤中,开始、设置工具、配置结果、完成这4个步骤形成一个完整的相机操作流程;➢开始单击“开始”中“已连接”,如下图1.3所示,可以进行连接设备、断开设备、刷新、添加等操作。
图1.3单击“开始”中的“设置图像”,如下图1.4所示。
在“采集/加载图像”对话框中,“触发器”按钮是进行拍照,“实况视频”按钮是实时显示相机中的图像,“从PC加载图像”按钮是加载一张存在的图像。
图1.4在“编辑采集设置”对话框中,设置一系列相机参数,根据具体需要进行调节➢设置工具单击“设置工具”中“定位部件”按钮,对检测模型进行定位,作为识别的模型进行对比;单击“设置工具”中“检测部件”按钮,对模型进行编辑操作。
在“定位部件”的设置对话框中,如下图1.5所示,合格阀值:每次拍照之后的得分如果大于阀值,则拍照成功,否则失败;旋转公差:检测部件能够旋转的角度范围,如果在范围之类则会拍照成功,否则会失败图1.5➢配置结果单击“配置结果”中“通信”按钮,进行通讯设置操作,如下图1.6所示。
(完整版)康耐视视觉入门培训

一、连接相机1、根据康耐视接线说明书接好相机,通过网线连接上电脑。
在PC端打开in-sight浏览器。
2、打开“系统”菜单栏下的菜单项,或者右键点击In-Sight网络栏弹出“将网络、设备添加到网络”:查找出7402相机,如上图,其IP地址与PC不在同一个网段。
3、统一ip网段点击“复制PC网络设置”,输入125,点击“应用”,则把相机的ip地址设置为“192.168.0.125”,让相机、pc都处于192.168.0.xxx网段上。
4、打开相机双击“is7402_13ad6e”,则打开相机,之前设置的开机自动加载的作业(如pinwen.job)也打开。
“传感器”-》“启动”,设置相机上电后是否自动联机,设置自动加载的作业。
二、新建作业(电子表格下)1、转到电子表格视图2、“文件”-》“新作业”,或者点击左上角相应工具三、设置拍照参数双击“Image”,如下,设置触发模式和曝光时间等参数,这里设置为“手动”触发,即点击工具栏的触发图标或者按快捷键F5时,相机拍照。
四、校准1、calibrateGrid将坐标变换下的CalibrateGrid函数拖到一空白的电子表格B2:点击“实况视频“,调整好标定板(或者标定纸,没有的话可以打印)和镜头焦距等,让标定板清晰现实在视野中央,双击鼠标(或者按enter键):点击“触发器”,则右上角现实找出的特征点数(276)。
点击下方“校准”按钮:点击“确定”按钮,则校准完成。
2、CalibrateImage经过如此处理,实现了像素坐标系图像到毫米坐标系图像的映射。
五、训练模版1、拿走标定板,把要查找的物品放到视野范围,按F5拍照2、函数栏里,“视觉工具”-》“图案匹配”-》TrainPatMaxPattern图像框选A0或B4,默认是A0。
3、双击“图案区域”栏:调整紫色区,双击鼠标(或者点击“确定”图标,或者按“enter”键)。
模版训练完成。
六、查找模版FindPatMaxPatterns,另外的FindPatterns类似。
visionpro工具的使用方法

visionpro工具的使用方法VisionPro是一款功能强大的图像处理工具,广泛应用于工业自动化领域。
本文将介绍VisionPro工具的使用方法,帮助读者了解如何使用该工具进行图像处理和分析。
一、VisionPro简介VisionPro是由康耐视(Cognex)公司开发的一款图像处理软件,具有强大的图像处理和分析功能。
它可以帮助用户快速准确地进行图像检测、测量和识别等操作,广泛应用于制造业、物流业和医疗设备等领域。
二、安装和启动VisionPro1. 下载VisionPro安装包,并按照安装向导进行安装。
2. 安装完成后,找到VisionPro的快捷方式,双击启动该软件。
三、图像采集与预处理1. 连接相机:将相机与计算机连接,并确保相机正常工作。
2. 打开VisionPro软件,选择“图像采集”模块。
3. 在图像采集界面,选择相机类型和连接方式,点击“连接”按钮,建立与相机的连接。
4. 进行图像预处理:根据实际需求,对图像进行灰度化、滤波、增强等操作,以提高图像质量和对比度。
四、图像分析与处理1. 创建图像处理任务:在VisionPro界面中,选择“图像处理”模块,点击“新建任务”按钮,创建一个新的图像处理任务。
2. 设置图像处理参数:根据实际需求,设置图像处理的参数,如图像分辨率、灰度阈值、边缘检测算法等。
3. 进行图像分析:使用VisionPro提供的工具,对图像进行特征提取、形状匹配、缺陷检测等操作,以实现对图像中目标物体的识别和分析。
4. 优化图像处理算法:根据实际应用场景和图像特点,对图像处理算法进行调整和优化,以提高处理效果和准确性。
五、结果显示与输出1. 结果显示:VisionPro可以将处理后的图像结果以图像或数据的形式显示出来,方便用户查看和分析。
2. 数据输出:VisionPro还支持将处理结果以数据的形式输出,可以保存为CSV文件或直接与其他软件进行数据交互。
六、应用实例1. 工业自动化:VisionPro可以应用于工业自动化领域,用于产品质量检测、物体定位和识别等操作,提高生产效率和产品质量。
康耐视视觉入门培训
康耐视视觉入门培训(总10页)-CAL-FENGHAI.-(YICAI)-Company One1-CAL-本页仅作为文档封面,使用请直接删除一、连接相机1、根据康耐视接线说明书接好相机,通过网线连接上电脑。
在PC端打开in-sight浏览器。
2、打开“系统”菜单栏下的菜单项,或者右键点击In-Sight网络栏弹出“将网络、设备添加到网络”:查找出7402相机,如上图,其IP地址与PC不在同一个网段。
3、统一ip网段点击“复制PC网络设置”,输入125,点击“应用”,则把相机的ip地址设置为“”,让相机、4、打开相机双击“is7402_13ad6e”,则打开相机,之前设置的开机自动加载的作业(如pinwen.job)也打开。
“传感器”-》“启动”,设置相机上电后是否自动联机,设置自动加载的作业。
二、新建作业(电子表格下)1、转到电子表格视图2、“文件”-》“新作业”,或者点击左上角相应工具三、设置拍照参数双击“Image”,如下,设置触发模式和曝光时间等参数,这里设置为“手动”触发,即点击工具栏的触发图标或者按快捷键F5时,相机拍照。
四、校准1、calibrateGrid将坐标变换下的CalibrateGrid函数拖到一空白的电子表格B2:点击“实况视频“,调整好标定板(或者标定纸,没有的话可以打印)和镜头焦距等,让标定板清晰现实在视野中央,双击鼠标(或者按enter 键):点击“触发器”,则右上角现实找出的特征点数(276)。
点击下方“校准”按钮:点击“确定”按钮,则校准完成。
2、CalibrateImage经过如此处理,实现了像素坐标系图像到毫米坐标系图像的映射。
五、训练模版1、拿走标定板,把要查找的物品放到视野范围,按F5拍照2、函数栏里,“视觉工具”-》“图案匹配”-》TrainPatMaxPattern图像框选A0或B4,默认是A0。
3、双击“图案区域”栏:调整紫色区,双击鼠标(或者点击“确定”图标,或者按“enter”键)。
康耐视In-sight连接相机操作步骤
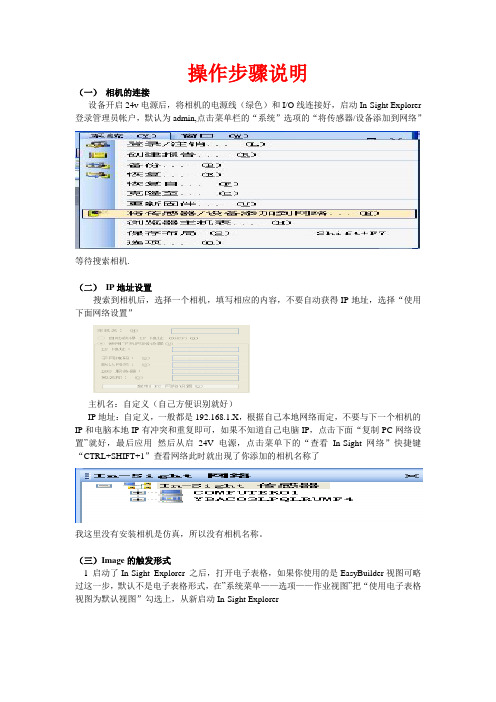
操作步骤说明(一)相机的连接设备开启24v电源后,将相机的电源线(绿色)和I/O线连接好,启动In-Sight Explorer 登录管理员帐户,默认为admin,点击菜单栏的“系统”选项的“将传感器/设备添加到网络”等待搜索相机.(二)IP地址设置搜索到相机后,选择一个相机,填写相应的内容,不要自动获得IP地址,选择“使用下面网络设置”主机名:自定义(自己方便识别就好)IP地址:自定义,一般都是192.168.1.X,根据自己本地网络而定,不要与下一个相机的IP和电脑本地IP有冲突和重复即可,如果不知道自己电脑IP,点击下面“复制PC网络设置”就好,最后应用然后从启24V电源,点击菜单下的“查看In-Sight网络”快捷键“CTRL+SHIFT+1”查看网络此时就出现了你添加的相机名称了我这里没有安装相机是仿真,所以没有相机名称。
(三)Image的触发形式1 启动了In-Sight Explorer 之后,打开电子表格,如果你使用的是EasyBuilder视图可略过这一步,默认不是电子表格形式,在”系统菜单——选项——作业视图”把“使用电子表格视图为默认视图”勾选上,从新启动In-Sight Explorer好了之后双击A0单元格“Image”在触发器选项里可以选择相应的触发EasyBuilder视图下的话就是在第一步“设置图像”进行设置(四)快捷手动触发和实时画面显示在脱机状态下,点击“图像”菜单下可以实现,如图也可以通过快捷栏实现(五)相机的联机与机上面说到相机脱机,其实相机的联机和脱机很简单,快捷键“CTRL+F8”也可以点击菜单栏“传感器”下的联机,脱机按钮实现电子表格的右下角会有显示状态,灰色时代表脱机,绿色时代表联机了。
(六)电子表格的快速显示和隐藏直接单机图像工具栏的“重叠”按钮即可旁边是“自定义表格”视图显示,,如果只需要显示自己定义的那块视图就按这个,或者快捷键F6。
康耐视Insight相机配置功能
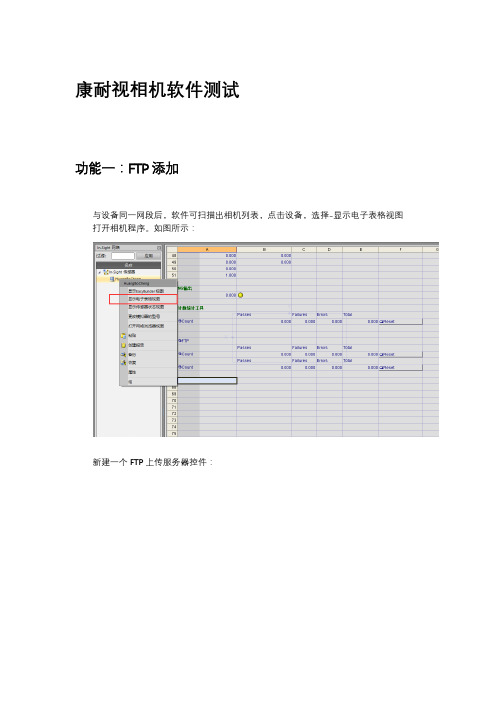
康耐视相机软件测试功能一:FTP添加与设备同一网段后,软件可扫描出相机列表,点击设备,选择-显示电子表格视图打开相机程序。
如图所示:新建一个FTP上传服务器控件:输入FTP,选择WriteImageFTP,按回车确定输入电脑ip地址,照片存储文件目录及文件名,其中d;\image 为目录,a为文件名,照片每次自动加1,例a001.bmp添加完成后显示效果:功能二:FTP上传文件名中增加文件目录,文件名,文件日期2.1 字符串添加及日期添加在表格中,配置文件存储目录,开头为引号‘在输入文件夹目录依次输入如下内容:给照片文件加上拍摄日期:在表格中输入NOW,如图所示:鼠标双击,进入设置界面点击确定自动在当前单元格后面,生成日期字符串看到显示日期格式存在问题,月日显示在前面,年份在后面,双击该单元格,更改显示顺序,及替换/ ,如图所示,更改日期格式显示:修改后格式字符串显示:%Y%m%d%H%M%S%显示效果如下:2.2.字符串组合应用字符串组合应用:concatenate 鼠标双击确定使用控件输入后,可点击单元格引用,想继续拼接,则逗号区分,继续点击下一单元格,如图所示:拼接后显示效果,其中日期在运行时,自动获取当前时间2.3.更改FTP控件中文件名双击FTP,弹出配置界面:点到文件名那一栏中,点击插入相对引用点击引用:即可使用拼接文件夹及名称功能三:NG/OK分别进行上传不同目录3.1 找到NG/OK信号打开程序,电子表格,可以找到NG信号引用的单元格可以通过NG信号上面为OK信号,可以将OK信号再其它单元格引用出来,便于观看3.2.根据OK/NG状态,开启不同FTP在原基础表格程序中,增加一个FTP存图函数,输入:WriteImageFTPNG/OK图片分别存放不同目录中,提前在目录中建立各相机名称及OK/NG文件目录如图所示:增加FTP设置存图路径为d:\image\NG\A 其中A文照片名称,根据设置相机会自动将A 代入照片名称例:A001.bmp根据NG/OK信号开控制两个FTP服务的开启和关闭功能,在程序中,只能运行一个FTP程序,需要控制FTP开启关闭,达到收到照片后,将照片分类进行上传。
康耐视相机的操作
2、 操作员在做卫生的 过程中,尽量不要用手 触摸相机的镜头,相机 的电源线。如果相机上 有灰尘,可以用嘴巴吹 掉就可以了。
3、操作员如发现上图 红色区域中,相机上 面的灯不亮了,或者 下图红色区域中,光 源一直亮着,工位的 报警器一直在响等问 题,请及时通知机修 人员,让他们来解决。
谢谢观看!
在上图中,有三个红色标记的工具,“自定义视图”、“重叠”、 “图形”。可以通过点击工具,实现程序界面的切换。切换后的 图如下。
自定义视图,显示当前界面产品的型号、拍照次数、拍照结果。
重叠,显示电子表格程序,片,拍照是否合格。
通过点击查看中“选择板”,可以关闭“选择板”,同时, 也可以关闭“In-Sight 网络”、“In-Sight 文件”等等。
2、相机软件的联机与脱机
软件联机与脱机有两种方法,如上图红色区域中。一般在 操作过程中,相机是处于联机状态下的。
软件有联机、脱机、通讯联 机三种状态,当图中红色区 域的“脱机”变成了“通讯 联机”那么说明,当前相机 与plc的通讯出现了问题,例 如程序号与产品型号不对应。
3、相机软件电子表格视图的切换
双击安装包,点击Next下 一步,等待安装进度条完 成,最后点击finish,完 成安装。
1、相机软件的启动
1、双击In-Sight Explorer,打开后,如下图2,然后点 击菜单栏中的系统,系统中的选项。
1
2
打开选项后,如 右图。第一次安 装时需要脱机编 程密钥。
如果没有脱机编 程密钥,将无法 进行编程和其他 操作。密钥需要 在康耐视的官网 里去获取。
4、相机软件中程序号对应产品型号 的掌握
点击文件中的“打开作业”,打开后如右图,图中有三个程序号: 1.job、101.job、31.job。这三个分别对应三种产品型号:A01、A10、 A03。
Cognex 照相机 使用总结
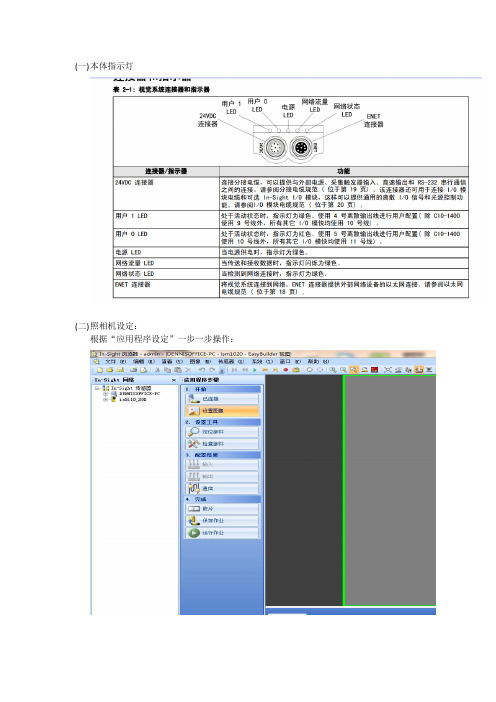
(一)本体指示灯
(二)照相机设定:
根据“应用程序设定”一步一步操作:
1.已连接:
注意方框左上角,当前显示DENNISOFFICE-PC表明当前是用的仿真器,双击is5110_SGE照相机后,标签即改变,软件才连接到照相机。
2.设置图像
调整图像质量:曝光时间可以调整图像质量。
我们采用PROFINET, 所以触发方式注意要选择“网络”!
3.定位部件
框选目标
4.检查部件
选择“一维码”“二维码”。
5.通信
选择PROFINET,并配置所需的数据。
请遵循以下配置:
数据:
6.保存作业:
注意勾选“在联机模式下启动传感器”,这样每次上电后它就自动切换到联机模式了。
联机模式:照相机自动工作时的模式。
脱机模式:编程时用的模式。
7.运行作业
可以监控照相机的运行。
在IPC上点击手动按钮以测试触发是否成功。
(三)网络设定
“传感器”---“网络设定”
(四)PLC端:
在HARDWARE 里直接MONITOR 传过来的数据。
然后再在DB里查找问题。
Cognex康耐视相机操作使用说明书
康耐视相机操作使用说明书文档密级□不保密■内部□机密文件状态:项目名称版本号 1.0■草稿描述康耐视相机操作使用说明书□修改□定稿编写人余国鹰编写日期2015/9/10审核人审核日期目录一、 康耐视相机具体设置 (3)1.1 软件安装 ......................................................................................................................................................................... 错误!未定义书签。
1.2流程编辑 (3)1.3 CODESYS通信注意事项 (6)二、 相机标定 (7)2.1 相机校准 ....................................................................................................................................................................................................................... 7 2.2 绝对坐标实现 ............................................................................................................................................................................................................. 9 2.3相对坐标实现 (10)三、 示教器示例程序 (11)3.1 绝对坐标实现范例 ............................................................................................................................................................................................... 11 3.2相对坐标实现范例 (11)四、 CODESYS 逻辑开发 (13)4.1 S OCKET通信开发 ........................................................................................................................................................................................... 13 4.2 外部点数据处理 .. (14)五、 细节说明 (17)康耐视相机操作使用说明书一、康耐视相机具体设置1.1 软件安装双击康耐视相机软件Cognex_In-Sight_Software_4.8.1 ,按照步骤一步步安装即可。
Cognex康耐视相机操作使用说明书
Cognex康耐视相机操作使用说明书上海新时达机器人有限公司康耐视相机操作使用说明书目录一、康耐视相机具体设置 (5)1.1软件安装 ......................................................................................................... 错误!未定义书签。
1.2流程编辑 (3)1.3C ODESYS通信注意事项 (6)二、相机标定 (7)2.1相机校准 (7)2.2绝对坐标实现 (9)2.3相对坐标实现 (17)三、示教器示例程序 (20)3.1绝对坐标实现范例 (20)3.2相对坐标实现范例 (21)四、CODESYS逻辑开发 (24)4.1S OCKET通信开发 (24)4.2外部点数据处理 (26)五、细节说明 (30)一、康耐视相机具体设置1.1软件安装双击康耐视相机软件Cognex_In-Sight_Software_4.8.1,按照步骤一步步安装即可。
1.2流程编辑1. 设置电脑本地连接IPV4地址为192.168.39.12(设置为39段即可)。
2. 双击康耐视In-Sight浏览器软件进入相机设置界面,软件会自动搜索连接的相机设备,如下图1.1所示。
图1.13. 双击相机设备(红色椭圆内设备图标),进入相机编辑界面,如下图1.2所示。
图1.24. 在应用程序步骤中,开始、设置工具、配置结果、完成这4个步骤形成一个完整的相机操作流程;➢开始单击“开始”中“已连接”,如下图1.3所示,可以进行连接设备、断开设备、刷新、添加等操作。
图1.3单击“开始”中的“设置图像”,如下图1.4所示。
在“采集/加载图像”对话框中,“触发器”按钮是进行拍照,“实况视频”按钮是实时显示相机中的图像,“从PC加载图像”按钮是加载一张存在的图像。
图1.4在“编辑采集设置”对话框中,设置一系列相机参数,根据具体需要进行调节➢设置工具单击“设置工具”中“定位部件”按钮,对检测模型进行定位,作为识别的模型进行对比;单击“设置工具”中“检测部件”按钮,对模型进行编辑操作。
Cognex康耐视相机操作技巧使用使用说明
康耐视相机操作使用说明书目录一、康耐视相机具体设置 (3)1.1软件安装 ......................................................................................................... 错误!未定义书签。
1.2流程编辑 (3)1.3C ODESYS通信注意事项 (6)二、相机标定 (7)2.1相机校准 (7)2.2绝对坐标实现 (9)2.3相对坐标实现 (10)三、示教器示例程序 (11)3.1绝对坐标实现范例 (11)3.2相对坐标实现范例 (11)四、CODESYS逻辑开发 (13)4.1S OCKET通信开发 (13)4.2外部点数据处理 (14)五、细节说明 (17)一、康耐视相机具体设置1.1软件安装双击康耐视相机软件Cognex_In-Sight_Software_4.8.1,按照步骤一步步安装即可。
1.2流程编辑1. 设置电脑本地连接IPV4地址为192.168.39.12(设置为39段即可)。
2. 双击康耐视In-Sight浏览器软件进入相机设置界面,软件会自动搜索连接的相机设备,如下图1.1所示。
图1.13. 双击相机设备(红色椭圆内设备图标),进入相机编辑界面,如下图1.2所示。
图1.24. 在应用程序步骤中,开始、设置工具、配置结果、完成这4个步骤形成一个完整的相机操作流程;➢开始单击“开始”中“已连接”,如下图1.3所示,可以进行连接设备、断开设备、刷新、添加等操作。
图1.3单击“开始”中的“设置图像”,如下图1.4所示。
在“采集/加载图像”对话框中,“触发器”按钮是进行拍照,“实况视频”按钮是实时显示相机中的图像,“从PC加载图像”按钮是加载一张存在的图像。
图1.4在“编辑采集设置”对话框中,设置一系列相机参数,根据具体需要进行调节➢设置工具单击“设置工具”中“定位部件”按钮,对检测模型进行定位,作为识别的模型进行对比;单击“设置工具”中“检测部件”按钮,对模型进行编辑操作。
康耐视相机标定及设置
坐标 数值
赋值 程序
程序
2、将标定针拆
下换上小吸盘、
电磁阀并接通,
小地 图安
小地
编好每块地图程 放位
图摆
置
序抓件、放件过
放位 置
程,准备连接相
机与机器人,需
要做以下步骤:
在完成设备硬件 配置后,进行程 序编写,每块地 图对应不同位置 ,在记录有关抓
保存In-Sight Explorer 项目,将相机设置为
取青海地图为例,首先在In-Sight Explorer
软件中拍照设定图片模板
模 板
软件图
和图像原点,取得图像原像输点原出点坐输出坐标,
单个 图模
标值
板
图像原点
接下来要进行 示教机器人作业,
将In-Sight Explorer软件 算出的图像原
点机器人坐标值输入到 机器人程序中
,包括X、Y、A值.将机 器人示教到青海地图处 ,使标定针轻触地 图 上尽量靠中心位置,如 图所示:
康耐视视觉系统使用方 法
自控部 赵勇
视觉系统使用要求:
❖ 在选取使用设备(镜头、相机、光源等) 、工作距离、工作现场时可以根据《镜头 选型计算工具》进行计算(可视情况而定) 。确保视觉系统工作现场无日照光直射, 光线稳定较暗为优。
❖ 确保工件有稳定特征。确保每个相机拍照 位置不变、每种工件安放高度不变(设备 稳定可靠)
7、在记录完10组数据后可以得出相应的误差
值,取10组平均值即平均误差。
相机输入坐 标值
机器人输入坐 相机输出坐
标值
标值
误差 值
确定误差值是否达到要求。在完成以上步骤 后,就完成了相机与机器人坐标的关联了( 相机软件获得相机坐标与机器人坐标算法关
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
美国康耐视智能相机操作说明书
一:安装Insight Explorer 4.5.0
二:设置PC和相机在同一网段
三:连接相机
四:设置图像
五:定位部件
六:检测部件
七:通讯
八:保存作业
九:运行作业及联机
十:硬件接线
一:安装Insight Explorer4.5.0
复制光盘的软件至PC硬盘,根据安装向导完成安装软件,安装成功,桌面出现Explorer4.5.0图标,如下:
二:设置相机和PC在同一网段
1.双击软件,在菜单栏选择“系统”>
“将传感器/设备添加至网络”
2.弹出“将传感器/设备调加到网络”对话框
3.选择相机,然后勾选“自动获得IP地址”
4.单击“应用”按钮,待弹出应用成功后,单击“关闭”按钮,显示如下画面
三:连接相机,双击相机“图标”,显示Explorer编辑画面
四:设置图像
1.新建作业
2.设置图像
五:定位部件
1.选择“图案”工具
六:检测部件
1.选择“计数”>“斑点工具计数”
七:通讯
1.输出设置
2.单击“详细信息”设置输出脉冲宽度
八:保存作业,选择启动作业,勾选“联机模式下启动作业”
九:运行作业及联机
-` 十:硬件接线
End。