小车装卸料的PLC控制
毕业设计装卸料小车多方式运行的PLC控制系统设计

Abstract:
Early electric car control system of the transporter over the relay - contactor complex system composed of The system design cycle,there is a long,bulky,high cost,defects,no data processing and communications functions,must be hand operated,will be applied to transport materials car PLC electrical control system and can realize automatic control operation of the car,reducing the running costs of the system,PLC control system for electric car transporter with a simple connection to control speed,reliability and maintainability is good,easy to install,repair and improvement and so on.With economic development,transport materials to various areas of growing car,from manual to automatic,and gradually formed the mechanization and automation.
基于PLC的装卸料小车控制系统设计

基于PLC的装卸料小车控制系统设计1.引言现代装卸料小车广泛应用于仓库、工厂、码头等场景,以提高装卸效率和减轻人工劳动强度。
本文将设计一个基于PLC的装卸料小车控制系统,以实现小车的自动化运行和物料的安全装卸。
2.系统概述装卸料小车控制系统由PLC、传感器、执行器、人机界面等组成。
传感器用于感知小车的位置和周围环境,PLC根据传感器反馈的信息控制执行器实现小车的运动和物料的装卸,人机界面用于操作和监控。
3.系统设计3.1传感器选择小车位置的感知可以选择使用编码器或激光测距传感器,周围环境的感知可以使用红外传感器或超声波传感器。
根据具体的应用场景和要求选择合适的传感器。
3.2PLC选择PLC作为控制系统的核心,负责控制整个系统的运行。
根据系统的需求选择合适的PLC,例如西门子、施耐德等品牌的PLC。
3.3执行器选择小车的运动可以选择使用电机驱动轮子,电机的选择需要根据小车的载重和速度等要求进行合理设计。
物料的装卸可以选择使用气缸、伺服电机或液压系统等执行器。
3.4人机界面设计人机界面可以选择使用触摸屏或按钮开关等设备,用于操作和监控系统。
界面需要提供启动、停止、急停、重置等按钮以及显示小车的位置和状态等信息。
4.系统功能4.1自动定位功能通过编码器或激光测距传感器感知小车的位置,PLC根据预设的路径和目标位置控制小车自动行驶到目标位置,并停止在合适的位置。
4.2路径规划功能根据物料的装卸点和仓库、工厂等场景的布局,PLC可以进行路径规划,使小车以最短路径或最优路径运行,并避开障碍物。
4.3动态装卸功能PLC根据传感器反馈的物料信息,控制执行器实现物料的自动装卸。
在装卸过程中,可以通过传感器检测装卸是否完成,确保装卸的安全性和正确性。
4.4人机交互功能人机界面可以实现对小车的启动、停止、急停和重置的操作,同时显示小车的位置和状态等信息。
人机界面还可以提供报警和故障信息的显示,方便操作人员进行及时处理。
欧姆龙plc与mcgs组态软件通信组态实例小车自动往返装卸料

2. 添加PLC设备
(3)在MCGS中PLC设备是作为子设备挂在串 口父设备下的,因此在向设备组态窗口中添加 PLC设备前,必须先添加一个串口父设备。欧姆 龙PLC的串口父设备可以用“串口通讯父设 备”,也可以用“通用串口父设备”。 “通用 串口父设备”可以在上图中左侧所示“可选设 备”列表中可以直接看到。“串口通讯父设备” 在“可选设备”列表的“通用设备”中,需要 打开“通用设备”项。双击“通用串口父设 备”,该设备将出现在“选定设备”栏。
2. 添加PLC设备
(4)双击“PLC设备”,弹出能够与MCGS通 信的PLC列表。选择“欧姆 龙”→“HostLink”→“扩展Omron HostLink”,双击“扩展Omron HostLink”图 标,该设备也被添加到“选定设备”栏,如图 所示。
2. 添加PLC设备
(5)单击“确认”,“设备工具箱”列表中出 现以上两个设备。来自3.设置PLC设备属性
3.设置PLC设备属性
(5)单击“[内部属性]”之后出现的“…”按钮,弹出图所示窗 口,列出了PLC的通道及其含义。内部属性用于设置PLC的读 写通道,以便后面进行设备通道连接,从而把设备中的数据送 入实时数据库中的指定数据对象或把数据对象的值送入设备指 定的通道输出。欧姆龙PLC设备构件把PLC的通道分为只读, 只写,读写三种情况,只读用于把PLC中的数据读入到MCGS 的实时数据库中,只写通道用于把MCGS实时数据库中的数据 写入到PLC中,读写则可以从PLC中读数据,也可以往PLC中写 数据。本设备构件可操作PLC的:IR/SR(输入输出/专用继电 器) ;LR(链接继电器),HR(保持继电器),AR(辅助继电 器),TC(定时器计数器),PV(定时计数)DM(数据寄存 器)。
装卸料小车
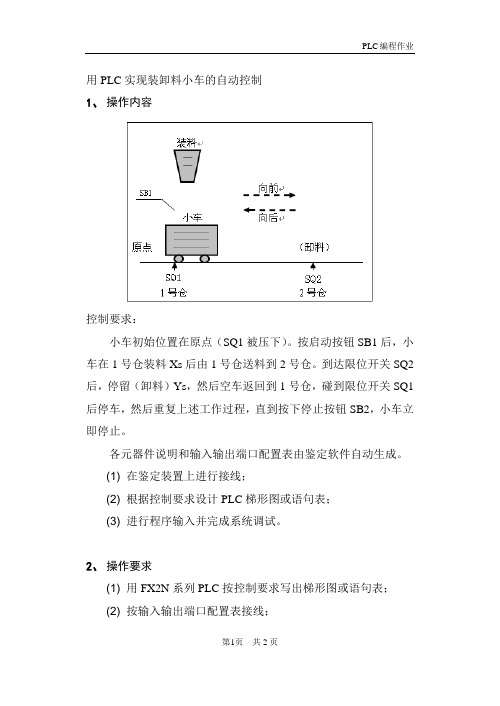
用PLC实现装卸料小车的自动控制
1、操作内容
控制要求:
小车初始位置在原点(SQ1被压下)。
按启动按钮SB1后,小车在1号仓装料Xs后由1号仓送料到2号仓。
到达限位开关SQ2后,停留(卸料)Ys,然后空车返回到1号仓,碰到限位开关SQ1后停车,然后重复上述工作过程,直到按下停止按钮SB2,小车立即停止。
各元器件说明和输入输出端口配置表由鉴定软件自动生成。
(1) 在鉴定装置上进行接线;
(2) 根据控制要求设计PLC梯形图或语句表;
(3) 进行程序输入并完成系统调试。
2、操作要求
(1) 用FX2N系列PLC按控制要求写出梯形图或语句表;
(2) 按输入输出端口配置表接线;
(3) 用基本指令编制的程序,进行程序输入并完成系统调试。
(4) 未经允许擅自通电,造成设备损坏者该项目零分。
装卸料小车多方式运行的PLC控制

课程设计课程名称机电传动控制题目名称装卸料小车多方式运行的PLC控制学院材料与能源学院专业班级 11材加2班学号 311学生姓名陈指导老师刘伟2014年6月21日目录摘要第1章任务描述1·1 控制任务和要求1·2 问题分析及解决方案第2章系统总体方案硬件设计部分2·1 PLC的基本结构及原理2·2 I/O地址分配表2·3 PLC卡外部接线图第3章用GX Developer设计系统软件部分3·1 控制流程图3·2 用 GX Developer编写系统梯形图及对应的语句指令程序3·3 系统梯形图程序说明及检测第4章用Automation Studio设计系统软件部分并仿真4·1 仿真方案及硬件电路图和接线图4·2 用Automation Studio编写系统软件部分4·3 仿真结果第5章结果分析5·1 系统调试及解决问题5·2 结果分析心得体会参考文献摘要在现代化生产中,生产机械的先进性和电气自动化程度反映了工业生产发展的水平。
现代化机械设备和生产系统已不再是传统的单纯机械系统,而是机电一体化的综合系统,机电传动控制系统是现代化机械的重要组成部分。
本次课程设计通过对“装卸料小车多方式运行的PLC控制”,意在巩固课堂知识,将理论融入时间,熟悉掌握PLC编程,以及练习学会运用GX Developer软件,和运用Automation Studio仿真。
关键词:PLC 梯形图仿真第1章任务描述某车间有5个工作台,装卸料小车往返于各个工作台之间,根据某个请求在某个工作台卸料。
每个工作台有一个位置开关(分别为SQ1-SQ5,小车压上时为ON)和一个呼叫按钮(分别为SB1—SB5)。
装卸料小车有3种运行状态,左行(电机正转)右行(电机反转)和停车。
1·1 控制任务和要求装卸料小车示意图如图1-1所示图1-1 装卸料小车示意图假设小车的初始位置是停在m (m=1-5)号工作台,此时SQm为ON。
装卸料小车PLC控制设计

图3。2 单周期控制流程图
3.3自动控制方式
3。3。1 自动控制要求
小车在A地点时,按一下自动运行按钮,小车将自动重复双周期运行过程,断开运行开关时,小车将前在完成一个循环后,结束运行。
在手动控制方式下不能运行双周期、自动运行方式,反之,双周期和自动运行方式下也不能运行手动控制。
1.2设计任务
本设计的任务设计一个运料小车往返运动PLC控制系统。系统控制要求如下:能实现如下三种控制要求
动控制方式
2.单周期运行控制方式
3.自动循环运行控制方式
二 硬件设计
2.1 I/O点数分配
分析控制要求,确定输入、输出设备系统的起动SD、停止ST需要2个按钮,起点和终点处的两个行程开关是用来自动控制小车的往复运动的,也应作为输入设备。
一 设计目的和任务
1.1设计目的
传统的运料小车大都是继电器控制,而继电器控制有着接线繁多,故障率高的缺点,且维护维修不易等缺点。作为目前国内控制市场上的主流控制器,plc在市场、技术、行业影响等方面有重要作用,利用PLC控制来代替继电器控制已是大势所趋。所以本设计采用plc作为运料小车的核心控制器件。
[6]王兆义.小型可编程控制器使用技术.北京:机械工业出版社,2001.1
[7]吴丽.电气控制与PLC实用教程。郑州:黄河水利出版社,2005.2
[8]王也仿。可编程控制器应用技术.北京:机械工业出版社,2001 [9]张晓峰.电气控制与可编程控制技术及应用。北京:国防工业出版社,2010
附录
梯形图程序
图5。6 自动运行(卸料)按下左限位开关
图5。7 自动运行(卸料)卸料输出
六 小结
课程设计的过程,是一次将大学本课程所学理论知识与实际相结合的过程,通过课程设计我学会了如何把理论知识与工程实际相联系,这将对以后走上工作岗位打下基础。另外,在设计过程中,用到了如word、AutoCAD等软件,这大大提高了自己的计算机水平。在设计的过程中得到了老师和同学的帮助,增进了师生之间的感情。由于设计过程中需要用到许多工程手册,这也提高了自己查找资料运用资料的能力。在完成课程设计之后我不仅对工程实际有所了解,同时也巩固了自己所学的理论知识,通过课程设计我是受益匪浅。
小车装卸料的PLC控制

综合成绩优秀()良好()中等()及格()不及格()教师(签名)批改日期2015年月日PLC应用综合设计报告院系电子与电气工程学院专业电气工程及其自动化课题小车装卸料的PLC控制班级学号姓名2015 年06月PLC应用综合设计调试记录班级:学号姓名:调试过程与结果(概要)一、小车装卸料的PLC控制按下启动按钮(I0.0)和A点行程开关(I0.4)启动。
Q4.0得电,电机右移。
当触碰到B点的行程开关(I0.5)时,停3秒。
Q4.1得电,电机左移,当触碰到A点的行程开关时,在A点停2秒,然后继续右移。
当触碰到C点的行程开关(I0.6)时,停2秒。
Q4.1得电,电机左移,当触碰到A点的行程开关时,在A 点停2秒,然后继续右移。
当触碰到D点的行程开关(I0.7)时,停2秒。
然后返回到A点继续上述步骤。
教师检查调试情况调试成功()调试基本成功()调试失败()现场答辩情况通过()未通过()教师签名日期课题一、小车装卸料的PLC控制一、控制要求1.基本要求某小车在A点装满料后,按启动按钮(SB1),则向右运行至B点,等待卸料3秒后返回,到A点等待装料2秒后再向右运行至C点(B点右边),等待卸料3秒后返回至A点,在A点等待装料2秒后再向右运行至D点(C点右边),等待3秒后返回A点再等待2秒后右行至B点……如此循环工作。
按停止按钮(SB2)则本次卸料完成返回至A点停止运行。
(A、B、C、D点都装有行程开关)2.提示每一个循环第一次到达B、C点时停止,后面再到继续右行,使用基本逻辑指令设计程序在第一次到B、C点停止后分别用中间继电器自锁记忆,用其触点有B、C点的行程开关常闭点并联以决定是否停车。
一个循环结束后找到逻辑条件断开两中间继电器。
也可以用移位指令设计程序,逻辑相对简单。
按停止按钮后不是立刻停止,因此应该用以中间继电器自锁直至到达A点在产生真正停止逻辑,该中间继电器可以在按启动按钮时断开。
图5 小车装卸料的工作示意图注:A、B、C、D在一条直线上,即到D点必先经过B点后经过C点方可到达D点。
基于PLC的装卸料小车控制系统设计

基于PLC的装卸料小车控制系统设计摘要近年来,随着科学技术的进步和微电子技术的迅速发展,可编程序控制技术已广泛应用于自动化控制领域,可编程序控制器(PLC)以其高可靠性和操作简便等特点,已经形成了一种工业趋势。
该系统在各种环境下都能够工作,PLC用存储逻辑代替接线逻辑,大大减少了控制设备外部的接线,使控制系统设计及建造的周期大为缩短,同时日常维护也变得容易起来,更重要的是使同一设备经过改变程序而改变生产过程成为可能。
文中详细介绍了运料小车的各硬件组成并完成了PLC外部接线图。
在PLC 梯形图的编写时,文中采用了三菱PLC梯形图专用编译软件GX 来进行编写。
现代工业生产中大量运用PLC控制运料小车,并结合组态王软件完成数据通信、网络管理、数据处理,使生产自动化,智能化,大大提高了生产效率,降低了劳动成本。
关键词:PLC,运料小车,控制系统前言 (3)第1章概述 (5)可编程逻辑控制器简介 (5)第2章PLC系统选择 (6)2.1 选型分析 (6)2.2 系统的安装 (7)2.3 输入/输出模块的选择 (7)2.4 抗干扰措施 (8)2.5 PLC的选型 (9)2.6运料小车控制发展的历程 (11)2.7 运料小车系统方案的确定 (11)第3章系统硬件设计 (13)3.1 运料小车的运动流程 (13)3.2 系统的硬件设计 (16)3.3主要参数计算 (17)3.4 I/O地址分配 (18)数字量输入部分 (18)数字量输出部分 (19)内部继电器部分 (19)3.5 I/O接线图 (20)第4章PLC程序设计 (21)4.1 梯形图的概述 (21)4.2 语句表的概述 (21)4.3 小车运行条件 (22)4.4 梯形图 (23)行程开关 (23)小车启停辅助继电器 (24)呼叫按钮 (24)比较 (27)向左运动 (28)向右运动 (29)第5章控制系统的调试 (33)5.1 编程软件 (33)5.2 程序的下载、安装和调试 (33)总结 (36)致谢 (38)前言随着社会迅速的发展,各机械产品层出不穷。
装卸料小车多方式运行的PLC控制2
装卸料小车多方式运行的PLC控制一.问题分析及解决方案1.1问题描述某车间有五个工作台,装卸料小车往返于各个工作台之间,根据请求,在某个工作台卸料,每个工作台有位置开关(分别为SQ1---—SQ5,小车压上时为ON)和一个呼叫按钮(分别为SB1—SB5)。
装卸小车有3种运行状态,左行(电动机正转)、右行(电动机反转)和停车。
1。
2控制任务和功能要求1。
假设小车的初始位置是停在m(m=1~5)号工作台,此时SQm为ON。
2.假设n(n=1~5)号工作台呼叫,如果:·m〉n,小车左行到呼叫工作台停车。
·m<n,小车右行到呼叫工作台停车.·m=n,小车不动。
3.小车的停车位置应有指示灯指示。
小车运行条件:运料小车右行条件:小车在1、2、3、4号工作台,5号工作台呼叫;小车在1、2、3号工作台,4号工作台呼叫;小车在1、2号工作台,3号工作台呼叫;小车在1号工作台,2号工作台呼叫,以上为小车右运行条件.运料小车左右行条件:小车在2、3、4、5号工作台,1号工作台呼叫;小车在3、4、5号工作台,2号工作台呼叫;小车在4、5号工作台,3号工作台呼叫;小车在5号工作台,4号工作台呼叫,以上为小车左运行条件。
1.3问题分析及方案确定按照题目要求,5个工作台都有一个位置开关SQ,一个呼叫按钮SB和一个小车停车指示灯HL,小车初始位置在1~5号工作台中的其中一个,用行程开关SQ 常闭触点表示小车的停车位置,对应的指示灯亮,则其他位置应为SQ的常开触点表示,对应的指示灯灭,按钮初始状态为断开.设各个工作台位置从左到右按1~5号位置依次编配,用电动机正转和反转分别来控制小车的左行和右行。
由此可得出PLC的输入有5个按钮SB和5个行程开关SQ和一个继电器FR,都为直流数字量输入,PLC的输出有五个指示灯HL和控制电动机正反转的两个接触器KM1和KM2,都为数字量输出。
二.PLC选型及硬件配置选择西门子S7-300PLC,具体硬件配置在STEP7编程软件中如图2。
PLC 情景一 装卸料小车自动往返的控制

1.听取教师讲解实训室安全管理规定以及安全操作规程,请将规定及规程中,你认为最重要.最核心的5条内容记录如下
1)实训过程中,要注意加强学生遵守《安全操作规程》的教育,并严格按规程执行。
2)电路未经证明是否有电时,应视作有电处理,不得用手触摸,避免触电事故发生。
3)电气设备出现故障,应首先切断电源,确认无电后方可修理,而且在电源开关上挂上“不准合闸”的标志。
供应24V直流电源输出可连接至外部传感器,作外部传感器的电源使用
4
输出信号端子Y0、公共端子COM0
用于连接PLC与输出设备输出信号端子又称输出点,也采用八进制,共8个输出点。同组输出点不能使用不同电源,一般要查阅PLC使用手册,根据负载大小,电源等级及电源类型,合理分配,正确使用。
5
输出信号端子Y1、公共端子COM1
图1.5晶闸管输出电路
工作原理:PLC的一个扫描周期必经输入采样、程序执行和输出刷新三个阶段。PLC在输入采样阶段:首先以扫描方式按顺序将所有暂存在输入锁存器中的输入端子的通断状态或输入数据读入,并将其写入各对应的输入状态寄存器中,即刷新输入。随即关闭输入端口,进入程序执行阶段。PLC在程序执行阶段:按用户程序指令存放的先后顺序扫描执行每条指令,经相应的运算和处理后,其结果再写入输出状态寄存器中,输出状态寄存器中所有的内容随着程序的执行而改变。输出刷新阶段:当所有指令执行完毕,输出状态寄存器的通断状态在输出刷新阶段送至输出锁存器中,并通过一定的方式(继电器、晶体管或晶闸管)输出,驱动相应输出设备工作。
全体组员
14-3-7
11
练习诚创CAD制图软件
全体组员
14-3-17
12
绘制电气原理图
全体组员
装卸料小车plc控制课程设计

装卸料小车plc控制课程设计一、教学目标本课程的教学目标是使学生掌握装卸料小车PLC控制的基本原理和应用技能。
具体目标如下:1.知识目标:学生需要了解PLC的基本组成、工作原理、编程方法和应用领域;掌握装卸料小车的结构、工作原理和操作方法。
2.技能目标:学生能够熟练使用PLC编程软件进行程序设计,实现装卸料小车的自动控制;具备分析和解决装卸料小车运行中遇到的问题的能力。
3.情感态度价值观目标:培养学生对自动化技术的兴趣和热情,提高学生动手实践能力和团队协作精神,使学生认识到装卸料小车PLC控制在现代工业中的重要地位和作用。
二、教学内容本课程的教学内容主要包括以下几个部分:1.PLC基础知识:介绍PLC的基本组成、工作原理和编程方法。
2.装卸料小车结构与原理:讲解装卸料小车的结构、工作原理和操作方法。
3.PLC控制编程:教授如何使用PLC编程软件进行程序设计,实现装卸料小车的自动控制。
4.装卸料小车PLC控制应用:分析实际应用案例,让学生掌握装卸料小车PLC控制系统的调试和维护方法。
5.综合训练:学生进行装卸料小车PLC控制系统的安装、调试和优化,提高学生的实践能力。
三、教学方法为了实现本课程的教学目标,将采用以下教学方法:1.讲授法:讲解PLC基础知识和装卸料小车结构与原理。
2.案例分析法:分析实际应用案例,让学生了解装卸料小车PLC控制的应用场景。
3.实验法:学生进行装卸料小车PLC控制系统的安装、调试和优化,提高学生的实践能力。
4.讨论法:鼓励学生积极参与课堂讨论,培养学生的创新思维和团队协作精神。
四、教学资源为了支持本课程的教学内容和教学方法,将准备以下教学资源:1.教材:选用权威、实用的教材,为学生提供理论知识的学习依据。
2.参考书:提供丰富的参考资料,帮助学生拓展知识面。
3.多媒体资料:制作精美的PPT、教学视频等多媒体资料,提高学生的学习兴趣。
4.实验设备:准备装卸料小车PLC控制实验设备,为学生提供实践操作的机会。
装卸料小车PLC控制设计

装卸料小车PLC控制设计一、项目装卸料小车是一种被广泛应用于仓库、工厂、码头等场所,用于运输物品、并且可以方便地进行装卸货物的车辆。
然而,如果仅仅依靠人力操作来控制这种小车的方向、速度、装卸物品的起止时机等,不仅效率低下,而且容易出现人为失误。
因此,为了提高工作效率和安全性,我们需要使用PLC(可编程逻辑控制器)对装卸料小车进行自动控制。
二、方案设计根据装卸料小车应具备的功能,我们需要设计以下PLC控制程序:1.小车前进、后退、左右转弯的控制程序2.小车装卸物品的控制程序3.小车速度控制程序小车前进、后退、左右转弯的控制程序1.由操作员通过控制面板输入小车移动的目的地和方向。
2.PLC接收控制面板发来的移动指令,根据指令输出不同电磁阀的信号。
3.电磁阀控制小车的液压系统,使小车按照设定的方向和速度移动。
小车装卸物品的控制程序1.由操作员通过控制面板输入小车运输物品的目的地。
2.PLC接收控制面板发来的运输指令,同时检测小车的位置和状态。
3.当小车到达目的地时,PLC判断小车状态,将液压系统控制装卸机械进行工作,将物品放置在设定位置。
小车速度控制程序1.PLC检测小车的速度和运行状况。
2.当小车需要减速或停止时,PLC控制电磁阀,使液压系统减少液压压力。
3.当小车需要加速时,PLC控制电磁阀,增加液压压力,使小车加速。
三、PLC硬件配置由于PLC的选型和安装方式对项目的可靠性和效率有着非常重要的影响,我们需要根据项目的要求,选择合适的PLC硬件配置。
这里我们选用了西门子S7-1200 PLC,其具有以下优点:1.小巧、性能强大,适合中小型应用场合。
2.具有高速IO和通讯接口,可快速响应传感器信号和控制指令。
3.可通过编程软件对PLC进行编程和调试。
四、PLC编程这里使用的编程软件为西门子Step7 Basic V13,通过以下步骤实现PLC编程:1.创建PLC项目,设定CPU类型和DI/DO/DQ等IO端口。
装卸料小车PLC控制设计
编号《电气控制与 PLC》课程设计( 级本科)题 目: 装卸料小车 PLC 控制设计院 (系): 物 理 与 机 电 工 程 学 院专 业: 电 气 工 程 及 其 自 动 化作者姓名:指导教师:职 称:完成日期:年月日课程设计任务书学生姓名学号专业方向电气工程及其自动化班级题目名称 一、设计内容及技术要求: 1.完成运料小车控制要求。
装卸料小车 PLC 控制设计一辆小车在 A、B 两点之间运行,在 AB 两点之间各设一个限位开关,如图所 示,小车在 A 点时(后限位开关受压动作),操作控制按钮可使小车前行至料都 下碰到前限位开关停止,装料后再返回 A 点将料卸下。
小车要求有 3 种控制方 式。
(1)手动控制方式 (2)单周期运行控制方式 (3)自动循环运行控制方式A 手动方式 在手动控制方式下,可用 4 个控制按钮控制小车向前、向后运行,以及车门的打开和料斗门的代开。
小车的运行有三相异步电动机控制,小车的车门和料斗的车门由电磁铁控制,当电磁铁得电时料斗门或车门打开,失电关闭。
(1)手动控制要求a 小车向前运行:小车在料斗下面时不能向前运行,小车的车门在打开不能 运行,小车采用点动控制,按下向前运行按钮,小车向前进,当小车行至料斗下2/2时碰到前限位开关时应停下来。
b 小车向后运行:小车在 A 地点时不能后退,小车的车门在打开时不能运行,小车采用点动控制,料斗门未关闭时不能运行,按下向后运行按钮时,小 车向后运行至 A 地点时小车碰到后限位开关时应停下来。
c 料斗门打开控制:小车必须在 B 地点时,才能打开车门,以保证将料卸 在地上。
按下料斗门打开按钮,控制料斗门的电磁铁得电,斗门打开,延时十 秒后电磁铁失电斗门关闭。
d 车门打开控制:小车必须在 A 地点时,才能打开车门,以保证将料卸在 规定地点。
按一下车门打开按钮,控制车门的电磁铁得电,车门打开,延时十 秒后电磁铁失电,车门关闭。
B 单周期运行控制要求小车在 A 地点,并且在车门关好的情况下,按一下向前运行按钮。
装卸料小车多方式运行PLC控制详解
信息科学与工程学院课程设计报告( 2012~2013 学年第二学期)题目装卸料小车多方式运行PLC控制院(系、部)控制系课程名称电气控制技术综合课程设计专业自动化年级2010级学号1015321018姓名黄佳琛指导老师晏来成郑义民目录第1章引言 ............................................................................... 错误!未定义书签。
1.1 三菱FX2N系列PLC介绍 ........................................... 错误!未定义书签。
1.2 设计内容及要求 ......................................................... 错误!未定义书签。
第2章系统总体方案设计 .. (4)2.1 系统硬件配置及组成原理 (4)2.1.1 PLC的基本结构 (4)2.1.2运料小车的工作原理及其主要组成部分 (4)2.2 系统变量定义及分配表 (4)2.3 PLC接线图设计 (5)2.4 系统可靠性设计 (6)第3章控制系统设计 (7)3.1 控制程序流程图设计 (7)3.2 控制程序设计思路 (8)3.3 控制程序具体实现 (9)第4章上位监控系统设计 ....................................................... 错误!未定义书签。
4.1 PLC与上位监控软件通讯 (10)4.1.1 组态软件 ............................................................. 错误!未定义书签。
4.1.2 组态通讯 ............................................................. 错误!未定义书签。
卸料小车的PLC自动控制
湘潭大学毕业设计说明书题目:小车装卸料PLC系统学院:职业技术学院专业:机电一体化技术学号: 20099202142 姓名:徐宇指导教师:张志纯完成日期: 2011年5月10日湘潭大学毕业论文(设计)任务书论文(设计)题目:小车装卸料运行plc控制系统学号:20099202142 学生姓名:徐宇专业:机电一体化技术指导教师姓名:张志纯系主任:黄祯祥一、主要内容及基本要求在一些自动化生产线上,为了实现多地点随机卸料或者多地点随机搜集成品或(废品),经常会用到一台装卸料小车,如下图所示的装卸料小车可以根据请求在5个位置停车,进行装卸料,SQ1~SQ5为5个停车位置的行程开关,小车压上时为ON,小车离开时为OFF,SB1~SB5为互锁的琴键开关,用于选择小车的位置。
:小车在电动机的拖动下运行,电动机正转时小车右行,电动机反转时小车左行,具体控制如下:1、当选择按钮号与小车位置压下的行程开关号同时,按下启动按钮,小车停止不动。
2、当选择按钮号大于小车位置压下的行程开关号时,按下启动按钮,小车向右运行直至两者相等时,小车停止。
3、当选择按钮号小于小车位置压下的行程开关号时,按下启动按钮,小车向左运行直至两者相等时,小车停止4、撰写设计说明书(论文)。
二、重点研究的问题(1)料的感应的PLC程序编写(2)整个装卸聊过程的PLC控制程序的编写(3)PLC I/O借口的连接线路三、进度安排(指导教师填写)序号各阶段完成的内容完成时间1 查阅资料、调研4月1日到5日2 开题报告、制订设计方案4月6日到10日3 实验(设计) 4月10日到12日4 分析、调试等4月13日到15日4月16日到1日5 写出初稿5月1日到5日6 修改,写出第二稿5月6日到10日7 写出正式稿四、应收集的资料及主要参考文献【1】于庆广.可编程控制器原理与系统设计.北京:清华出版社,2004【2】齐荣.可编程计算机控制器原理及应用.西安:西北工业大学出版社,2002【3】夏辛明黄宏高光.可编程控制器技术及应用.北京:北京理工大学出版社,2005 【4】汪晓平.plc可编程控制器系统开发实例导航.北京:人民邮电出版社,2004【5】江秀汉杨楠.plc可编程控制器原理及应用.北京:机械工业出版社,1998【6】孙振强.可编程控制器原理与应用教程.北京:清华大学出版社,2005【7】李建兴.可编程控制器件应用技术.北京:机械工业出版社,2004【8】Daibida.geller.可编程控制器原理与设计.北京:清华大学出版社,2006【9】郁汉琪郭建.可编程控制器原理与应用.北京:中国电力出版社,2004【10】周美兰周封王岳宇.plc电气控制与组态设计.北京:科学出版社,2005【11】廖常初.PLC编程及应用。
实训二 PLC控制运料小车

作业4:
两处卸料的小车控制系统的梯形图设计: 要求:运料小车右行在SQ3处卸料一半后;继续右行在 SQ2处卸料剩余的一半后返回到SQ1处。如此往复。
装料
卸料一半
卸料另一半
作业5:
两处卸料的小车控制系统的梯形图设计: 要求:运料小车第一次右行在SQ3处卸料后返回;第二次 右行在SQ2处卸料返回。如此往复。
实训二 PLC控制运料小车
一、实训目的 1、用PLC构成一个运料小车的控制系统。 2、熟练掌握编程软件的基本操作 3、掌握PLC的外部接线及操作。
运料小车的控制
装料
卸料
按下正转起动按钮X0后,设备的运动部件在左限位开 关X3和右限位开关X4之间不停地循环往返,直到按下 停止按钮X2. 装卸料的时间设为6s。
装料
第一次卸料
第二次卸料
±24V PLC
~24V
修改、完善以满足控制要求:
1)小车在两处装料、卸料需要延时,应增加定时器。
2)延时结束,小车要能自动继续左行或右行,在SQ1或SQ2处,就算曾经按下停止按钮,小车 仍然会自行起动。 解决方法:增加辅助继电器记忆起动信号
基于PLC的装卸料小车控制系统设计
基于PLC的装卸料小车控制系统设计摘要本次毕业设计是对装卸料小车的的发展历程,发展趋势,现实生活中的应用,以及PLC在运料小车控制技术的介绍。
采用德国西门子公司的可编程控制器S7-200 CPU226 为控制主体,根据需要让小车来完成5个不同位置的自动装卸料控制,同时系统还具有短路、过载、欠电压等保护措施。
可编程序控制器PLC是微机技术和传统的继电接触控制技术相结合的产物。
他的控制系统可靠性高,抗干扰能力强、功耗低、通用性和灵活性强,可编程序控制器以体积小功能强大著称,它不但可以很容易的完成顺序逻辑、运动控制、定时控制、计数控制、数字运算、数据处理等功能,而且可以通过输入输出接口建立与各类生产机械数字量和模拟量的联系,从而实现生产过程的自动控制。
特别是现在,由于信息、网络时代的到来,拓展了PLC的功能,使它具有很强的网络通信能力,从而更广泛的应用于众多行业。
关键词:PLC,装卸料小车,控制Design of the loading and unloading car control systembased on PLCABSTRACTThe graduation design is to loading and unloading of the car development course, development trend, real life applications, and PLC in loading and unloading control technology in the paper. Using of the Germany Siemens S7-200 PLC to control CPU226 main body, according to need to let the car to complete the five different position automatic loading and unloading control, and the system also has a short circuit, overload, owe voltage protection measures, etc.PLC programmable controller is the technology with traditional microcomputer relay contact control technology ,it is the outcome of the combination of the control system has high reliability and anti-interference capability is strong ,low power consumption, high universality and flexibility, programmable controller to small powerful functions, it is not that can easily finish order logic, motion control ,timing, counting control, digital computing and data processing and so on the function, and can be established through input/output interface with various production machinery digital and analog connection ,so as to realize the automatic control of the production process .Especially now, due to the arrival of the era of information ,network ,expanding the function of PLC, to make it strong network communication ability, thus more widely applied in many industries.KEY WORDS: PLC,Loading and unloading trolley,Electrical control system目录前言 (1)第1章绪论 (2)1.1课题背景 (2)1.2运料小车控制发展的历程 (4)第2章可编程控制器的概述 (5)2.1 PLC的定义 (5)2.2 PLC的发展 (5)2.3 PLC的特点 (6)2.4 PLC的基本组成及各部分作用 (6)2.4.1中央处理单元 (7)2.4.2存储器 (7)2.4.3 I/O单元 (8)2.4.4 电源部分 (9)2.4.5 扩展接口 (9)2.4.6 通信接口 (9)2.4.7 编程器 (9)2.4.8 人机界面 (10)2.5 PLC的应用领域 (10)第3章硬件设计 (12)3.1 装卸料小车的运动流程 (12)3.1.1 控制系统工作原理 (12)3.1.2 控制要求 (12)3.1.3 运料小车控制流程图 (13)3.2 控制系统硬件设计 (14)3.2.1 主电路图 (14)3.2.2 I/O地址分配 (15)3.2.3 I/O接线图 (16)3.2.3元件列表 (16)第4章软件设计 (18)4.1 程序设计分析 (18)4.1.1 小车运行条件 (18)4.1.2 编制运行条件 (18)4.2 梯形图的绘制 (19)4.3 语句表 (22)第5章模拟调试 (26)5.1 编程软件 (26)5.2 STEP7-Micro/WIN32软件安装 (26)5.2.1 系统要求 (26)5.2.2 硬件连接 (26)5.2.3 软件安装 (27)5.3 程序的运行、监控与调试 (27)5.3.1 程序的运行 (27)5.3.2 程序的监控 (27)第6章组态画面设计 (29)6.1 组态介绍 (29)6.2 组态画面的创建 (29)6.2.1 新建组态工程 (29)6.2.2 建立组态画面 (31)6.2.3 定义外部设备 (32)6.2.4 构造数据库 (33)6.2.5 创建动画连接 (35)结论 (37)谢辞 (38)参考文献. (39)附录 (40)外文资料翻译 (42)前言随着电子技术、计算机技术的迅速发展,可编程控制器的功能已远远超出了顺序控制的范围。
PLC技术在卸料小车自动化控制中的应用
PLC技术在卸料小车自动化控制中的应用摘要:在电气工程的发展中,PLC技术对电气工程起到巨大贡献。
可以实现自动化的控制和应用。
将此技术应用到卸料小车控制系统中,实现了卸料小车的自动化控制,不仅降低人工以及维护的费用,还可以提高生产的效率。
随着经济的发展,PLC技术在卸料小车自动化控制系统中的应用,已经不断的扩大到国内外工程。
关键词:PLC技术;PLC控制系统;自动化控制;应用1.卸料小车自动控制中PLC技术相关概念及特点1.1PLC技术相关概念PLC作为系统的主控制器具有独特的优越性,相对于其他的技术而言,PLC 技术在系统安全可靠性以及网络互连性方面更强。
可以在原有的基础上建立PLC 技术系统,了解PLC技术应用的基本情况以及对于外界环境的抗干扰能力。
不断对外在的环境和系统进行改善。
总体来说,PLC技术在运行的过程中能够一定程度上达到安全性的发展模式,而且能够对一些外在的客观因素进行一定的抵制。
1.2 PLC技术特点分析PLC控制系统能够实现我国工业控制系统的长远发展,相比于传统继电器控制来说,它具有以下特点。
1)高强的抗干扰能力。
PLC的输入与输出在物理上是相互分隔开的,其是通过PLC主控制器中存储的程序经过运算后实现功能,这样就防止了电源相互出现的干扰问题。
另外,PLC控制系统的内部像“监视器”一样,可以时刻关注CPU 的工作状况,确保控制系统可以正常运转。
2)维护管理便捷。
传统的控制系统是由接触器和继电器组成,虽然其抗干扰能力强,但是触点使用寿命低、可靠性差的缺点。
PLC控制技术与其它传统系统不同,PLC技术在CPU中拥有大容量的存储空间。
这些优点可以应用于大规模的改造项目,对管理和维护都十分的便利。
3)学习和操作易掌握。
梯形图编程语言在PLC控制技术中是运用最多的一种语言,这种语言结构对于技术人员无论具体使用,还是深入学习,都是非常高效的。
PLC技术还将分析、运算和通讯功能融合,简化了学习人员和操作人员对应用PLC技术的上手难度,更加方面在各行各业的应用。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
综合成绩优秀()良好()中等()及格()
不及格()
教师(签名)
批改日期2015年月日PLC应用综合设计报告
院系电子与电气工程学院
专业电气工程及其自动化
课题小车装卸料的PLC控制
班级学号
姓名
2015 年06月
PLC应用综合设计调试记录
班级:学号姓名:
调试过程与结果(概要)
一、小车装卸料的PLC控制
按下启动按钮(I0.0)和A点行程开关(I0.4)启动。
Q4.0得电,电机右移。
当触碰到B点的行程开关(I0.5)时,停3秒。
Q4.1得电,电机左移,当触碰到A点的行程开关时,在A点停2秒,然后继续右移。
当触碰到C点的行程开关(I0.6)时,停2秒。
Q4.1得电,电机左移,当触碰到A点的行程开关时,在A 点停2秒,然后继续右移。
当触碰到D点的行程开关(I0.7)时,停2秒。
然后返回到A点继续上述步骤。
教师检查调试情况调试成功()调试基本成功()调试失败()现场答辩情况通过()未通过()教师签名日期
课题一、小车装卸料的PLC控制
一、控制要求
1.基本要求
某小车在A点装满料后,按启动按钮(SB1),则向右运行至B点,等待卸料3秒后返回,到A点等待装料2秒后再向右运行至C点(B点右边),等待卸料3秒后返回至A点,在A点等待装料2秒后再向右运行至D点(C点右边),等待3秒后返回A点再等待2秒后右行至B点……如此循环工作。
按停止按钮(SB2)则本次卸料完成返回至A点停止运行。
(A、B、C、D点都装有行程开关)
2.提示
每一个循环第一次到达B、C点时停止,后面再到继续右行,使用基本逻辑指令设计程序在第一次到B、C点停止后分别用中间继电器自锁记忆,用其触点有B、C点的行程开关常闭点并联以决定是否停车。
一个循环结束后找到逻辑条件断开两中间继电器。
也可以用移位指令设计程序,逻辑相对简单。
按停止按钮后不是立刻停止,因此应该用以中间继电器自锁直至到达A点在产生真正停止逻辑,该中间继电器可以在按启动按钮时断开。
图5 小车装卸料的工作示意图
注:A、B、C、D在一条直线上,即到D点必先经过B点后经过C点方可到达D点。
中途电机过载或出现故障按复位按钮(SB3),则小车立刻停止。
可以用点动按钮(SB4)让其返回至A点。
二、控制系统的分析
1 设计思路
本课题2是关于小车装卸料的设计,本课题的难点1是如何实现A-B-A-(B)-C-(B)-A-(B)-(C)-D-(C)-(B)-A,途中必须经过()中的点,难点2而是如何实现按停止按钮,小车不是立即停止而是本次卸料完成返回至A点停止运行,难点3是点动和急停按钮在程序中如何实现。
所以在此设计中同样用到中间继电器实现循环和转换,通过比较器和MOVE实现急停和点动的控制,普遍用到时间继电器对时间的控制,因为设计和实验的严谨性和完整性,在程序中根据具体要求加多种中间闭合触点。
以下就是设计的具体思路和分析。
2 设计步骤
主要通过中间继电器循序渐进实现整个过程
⑴向右运行 M0.0
⑵到B停止 M0.1 和 T0(3s)
⑶从B向左运行 M0.2
⑷到A停止 M0.3和T1(2s)
⑸ A-C右运行 M0.4
⑹到C停止 M0.5和T2(3s)
⑺从C向左运行 M0.6
⑻到A停止 M1.0和T3(2s)
⑼A-D右运行 M1.1
⑽到D停止 M1.2和T4(3s)
⑾从D向左运行 M1.3
⑿到A停止 M1.4和T5(2s)
⒀T停止 M2.0
⒁急停 MOVE移位清零
⒂点动 CMP比较器和M10.0
3 统计输入输出点的数量
输入点 8 输出点2个具体见后面输入输出分配表三、PLC系统硬件配置
四、主电路设计及说明
诠释:KM1小车向右运行,KM2小车向左运行
五、输入输出点分配与接线
1 输入输出点接线图
2 输入输出点分配表
I/O分配表电路元件功能说明
I0.0 SB1 启动按钮
I0.1 SB2 停止按钮
I0.2 SB3 复位按钮
I0.3 FR 过载保护
I0.4 SQA A点行程开关I0.5 SQB B点行程开关I0.6 SQC C点行程开关I0.7 SQD D点行程开关
Q4.0 KM1 右移Q4.1 KM2 左移六、PLC控制程序设计
七、调试过程及分析
输入并下载程序,点击监控按钮然后在实验台上进行相应的操作,如果在实验过程中不能实现预计的功能,可以通过监控观察发现问题在什么地方。
分析原因并进行相应的改正,直到能够实现为止。
八、心得总结
这次我们花了两周的时间完成了小车装卸料的PLC控制这个课题。
这个课题中涉及到了行程开关的运用和循环的运用。
为此我们借阅了图书馆的相关书籍,了解了他们中的一些使用技巧。
当然还要感谢老师和同学给予我们的帮助。
尤其是值班老师,每次在我们设计遇到困难和瓶颈时,老师总是能够耐心地给我们讲解一些原理和方法。
本次的课程设计我们也学会了许多。