基于单片机的交流伺服电机控制研究
基于单片机的伺服电机控制本科毕业设计
毕业设计(论文)论文题目基于单片机的伺服电机控制器基千单片机的伺服电机控制器随着电力电子技术、智能控制技术的发展成熟,伺服机控制器已成为自动化装置的一个重要部分。
例如,印刷机应用了伺服机控制器来控制电机的转速和传送长度。
本论文阐述了基于单片机的伺服机控制器的控制原理,位置控制和电子齿轮的特点和应用,采用单片微机AT89S52作为中央控制器,AM26LS31为驱动器。
AT89S52主要与E - II控制器连接了位置控制,方向控制,正反转限制等。
AT89S52从P1 口输出脉冲序列,利用I丨控制器电子齿轮简便设置,控制伺服电机的总转动角度,控制输出脉冲的频率就可以控制伺服电机的速度,以达到控制伺服电机的目的。
此外还介绍了 E - II的控制器的结构连接图,特性,功能和用户常数设定,SGM □丨1型伺服机的发展,优点和工作原理。
还有介绍伺服系统的基本内容。
关键词:伺服系统;位置控制;电子齿轮;单片机AT89S52摘要ABSTRACTAs development of electric and electronic technology , intellectual control technology being ripe, the servo machine controller has already become an important part of the automatic device . For example, the printing machine has used the servo machine controller to control the rotational speed of the electrical machinery and length of conveyance. Thi k s thesis has explained the principle of control based on servo machine controller of the one-chip computer, position control and electronic characteristic and application of gear wheel, adopt single blocks of computer AT89S52 as the central controller, AM26LS31 is a driver . AT89S52 has connected position control with controller mainly, directional control, rotate positive and negativly and limit etc.. AT89S52 outputs the pulse array from PI mouth, utilizes controller's electronic gear wheel to be set up simply and conveniently, controlling always rotating the angle of the servo electrical machinery, controlling the frequency of outputting the pulse can control the temjx) of the servo electrical machinery , in order to achieve the goal of controlling the servo electrical machinery. In addition has recommended the structure of the controller of connect and pursue , the characteristic, the function and user's constant are established , SGM .The development of the type servo machine , the advantage and operation principle. Still introduce the basic content of the servo system.KEY WORDS: Servo system ; Position control; Electronic gear wheel ;One-chip computer AT89S52目录摘要 (I)ABSTRACT ........................................................................................................................................................... I I 引言 . (1)1伺服电机和控制器 (2)1.1伺服机的介绍 (2)1. 1. 1交流祠服机的发展 (2)1. 1. 2交流祠服机的优点 (2)1.2控制器的介绍 (2)1. 2.1控制器的特点 (2)1. 2. 2 E - IH司服控制器的介绍 (3)1. 2. 3 S - II伺服控制器的功能说明 (6)1. 2. 4 E - II伺服控制器的设定 (8)2伺服系统的控制 (11)2.1伺服电机的基本原理 (11)2. 1. 1伺服电机的工作原理 (11)2. 1. 2伺服电机的特点 (12)2.2伺服系统的介绍 (12)2.2.1伺服系统的概念 (12)2. 2. 2伺服系统定义 (13)2.2.3伺服的主要任务 (13)2.2.4伺服系统的组成 (13)2. 2. 5伺服系统的性能要求 (13)2. 2. 6伺服系统的种类 (13)2. 2. 7伺服系统对伺服电机的要求 (14)2.2_ 8伺服控制方式的优点和缺点 (14)3基于单片机的伺服机控制器 (15)3.1元器件AM26LS31和AT89S52的介绍 (15)3. 1. 1 AM26LS31 的工作原理 (15)3. 1. 2 AT89S52 的介绍 (15)3. 1. 3 AT89S52单片机的引脚介绍 (16)3.1.4中断系统 (18)3.2位置控制 (19)3. 2. 1位置指令 (19)3. 2. 2基于单片机的数字位置控制 (19)3. 2. 3位置控制的控制原理 (19)基千单片机的伺服电机控制器3. 2.4脉冲信号的产生 (20)3. 2. 5伺服电机的转速控制方式 (20)3. 3控制单元 (20)3. 4超程设定 (21)3. 4. 1超程设定的概念 (21)3.4. 2超程功能的使用 (21)3. 5 PWM控制技术 (22)3. 5. 1 PWM控制技术的定义 (22)3. 5. 2 PWM技术的应用 (22)3. 6电子齿轮 (23)3. 6.1电子齿轮的概念 (23)3. 6. 2电子齿轮的设定方法 (23)3. 6. 3电子齿轮比(B/A)。
基于单片机交流伺服电机控制研究[论文]
![基于单片机交流伺服电机控制研究[论文]](https://img.taocdn.com/s3/m/a06486106bd97f192279e97c.png)
基于单片机的交流伺服电机控制研究【摘要】设计一种单片机控制下的交流伺服电机转速系统,详细介绍它的硬件组成原理及其软件实现过程,实现了对通用交流伺服电机的速度闭环控制。
通过对实验结果的分析可以看出,本设计基本达到了系统对伺服电机转速控制的要求。
【关键词】单片机交流伺服电机由于交流伺服电机具有体积小、重量轻、大转矩输出、低惯量和良好的控制性等优点,因此已被广泛应用于自动控制系统和自动检测系统中。
在自动控制系统中,交流伺服电机的作用是把控制电压信号转换成机械位移,也就是把接收到的电压信号转变成该电机的一定转速或角位移,因此可以用单片机实现对伺服电机的控制。
1 总线驱动、数据、地址锁存及译码电路由于单片机的数据线和低位地址线共用必须加地址锁存器进行低位地址锁存,使用74l5373作为地址锁存器,当应用系统规模过大,扩展所接芯片过多,超过总线的驱动能力时,系统将不能可靠工作,此时应加用总线驱动器来减少读数据的持续时间,使用74ls245作数据驱动器整个系统可扩展的外部数据总共为64k,由于单片机外部数据存贮器和i/o是统一编址的,我们将低32k作为外部扩展的数据存储器,高译码电路采用两片74ls138用了32k作为i/o使用或留给以后扩展用74ls21,74lsll构成。
控制系统采用p89c58单片机作为控制系统处理器,该系列单片机默认1t模式,运算速快,片上集成1280字节ram,60k的flash程序存储器,还有eeprom,可使系统结构更为简单、实用电机选用的是松下的msmd5azg1u型交流伺服电机,额定输出功率50w,内置20位的增量式光电编码器。
驱动器选用的是松下的minasa5系列交流伺服驱动器madht 1505e。
伺服驱动器连接器x4(50脚)作为外部控制信号输入、输出接口,可以接收控制器发送给驱动器的控制指令。
交流伺服电机的控制方式有三种:位置控制、速度控制、转矩控制。
在位置控制模式下,驱动器接收单片机的位置控制指令信号,经电子齿轮分倍频后,在偏差可逆计数器中与反馈脉冲信号比较后形成偏差信号。
基于PIC单片机的交流伺服电机控制系统研究

A r t e ae Poi s s e eo ot l Csr 一 o r s s g 一 icm ue PC 8 48lcn eth dm n o 加t : ppr rv e a c m t cn oA ev m t ui i lc p o pt I1F 5. a m ete e ad f c h a T d h r o o 叩 neh r t
脉冲
PC 8 5 I 1F 8 4
光电拥合
反馈信号
功放
交 流 伺 服 电 机
显示屏
单片机
田 1 交流伺服电机控制系统组成框圈
2 系统硬件设计 控制系统 的 核 心 部 件 选 用 的 是 PC 系 列 I
差信号。反馈脉冲是由光电编码器检测到电机实际产 生的脉冲数,经四倍频后产生的。位置偏差信号经位
中圈分类号: P 7 : M334 2 T 23 T 8.+ 文献标识码: A
0 引吉
流伺服电机, 采用基于 PC 84 单片机实验开发系 I 1F 5 8 统的装置套件的某些功能来实现单片机控制器对伺服 电机的控制。通过矩阵键盘输人速度值,经过单片机 处理后, 转化成相应的脉冲信号;脉冲信号经过功率 放大后, 通过伺服驱动器驱动伺服电机按要求动作。 为 了实现对消防炮转角位置的精确控制,选用了光电编 码器作位置传感单元,将伺服电机转轴的角位置变换 成电脉冲信号,以供单片机控制器对电控消防炮转角 位置进行跟踪控制。交流伺服电机控制系统组成框图
基于PC单片机的交流伺服电机控制系统研究 I
曹昌勇,杨贵荣
( 皖西学院 机械与电子工程系,安徽 六安 27 2 30) 1
摘要: 介绍了基于PC 848 I 1F5 单片机实现交流伺服电机控制的一种方案, 能实现对伺服电机运转的平稳控制. 该方案在电机消防炮转角控制中得到了成功的应用,并且控制过程非常平稳, 定位精确度也很高。 关链词:交流伺服电机。 C单片机,位!控制 I P
基于单片机的交流电机转动控制系统设计

摘要本设计是采用MCU(AT89S52)为核心的价廉、高效的单相异步交流电机调速控制系统;对电机的调速方法和控制电路进行了分析和设计,完成了小型交流电机的转速采集、计算、显示。
该方法采用先进的过零调功的方式,以功率调节取代常用的电压调节,通过控制可控硅的通断比来调节电动机输出功率,并将非均匀采样情况下的增量式积分分离PID控制算法应用于交流电机的调速。
在设计中实现了对电机转速的测量,解决了PID 算法的积分饱和问题。
关键词:调速;PID控制;过零调功;AT89S52AbstractThis design is the use of MCU (AT89S52) as the core of inexpensive, highly efficient Single-phase asynchronous AC motor speed control system; the motor speed control method and control circuit are analyzed and designed, completed the acquisition of small AC motor speed, calculation, display . The method uses advanced Zero transfer function, a successful way to replace the commonly used power regulation with voltage regulation by controlling the thyristor on-off ratio to regulate the motor output power, and the non-uniform sampling points separated incremental PID control algorithm is applied to AC motor speed control. Achieved in the design of motor speed measurement, solving the PID algorithm is integral saturation problem.Keywords:speed control; PID control; Zero transfer function; AT89S52目录引言 (1)1 设计方案论证 (2)1.1系统结构方案论证 (2)1.2转速测量方案论证 (2)1.3电机驱动方案论证 (3)1.4键盘显示方案论证 (3)2系统原理框图设计 (4)3各模块的分析、计算和硬件电路设计 (5)3.1速度测量电路的设计 (5)3.1.1转速/频率转换电路的设计 (5)3.1.2脉冲滤波整形电路的设计 (5)3.2电机驱动电路的设计 (6)3.2.1过零检测电路 (6)3.2.2可控硅触发电路 (7)3.3LCD显示电路与单片机的接口设计 (8)4系统总程序框图设计 (9)5系统各部分子功能程序设计 (10)5.1电机转速测量程序设计 (10)5.2键盘程序设计 (11)5.3LCD显示子程序设计 (11)6 数字PID及其算法改进 (13)6.1PID控制基本原理 (13)6.2三个基本参数K P、T I、T D在实际控制中的作用研究 (13)6.3数字PID控制算法 (14)6.3.1位置式PID算法 (14)6.3.2增量式PID算法 (15)6.4PID算法的改进,“饱和”作用的抑制 (17)6.5PID控制算法的单片机程序实现 (18)7系统的调试过程与测试 (20)7.1PID各项系数临街比例法整定 (20)8结束语 (21)谢辞 (22)参考文献 (23)附录 (24)附录1:系统硬件总图 (24)附录2:系统PCB (24)附录3:程序清单 (25)引言随着生产的不断发展,速度可调成了传动装置的一项基本要求。
交流伺服电机的单片机控制及其应用
计算机技术应用 《机电技术》2004年第2期交流伺服电机的单片机控制及其应用江信建(闽东电机集团股份有限公司 福州 350005)摘 要:介绍了用单片机实现对伺服电机控制的一种方案,能实现对伺服电机变速、匀速运动的平稳控制。
该方案在彩色电脑喷印机上得到了成功应用,可实现对喷印过程的平稳控制,并能精确控制喷印位置。
关键词:伺服电机 单片机 速度控制方式中图分类号:TM301.2 TP368.1 文献标识码:B 文章编号:1672-4801(2004)02-040-03引言伺服电机属于一类控制电机,分为直流伺服电机和交流伺服电机两种。
由于交流伺服电机具有体积小、重量轻、大转矩输出、低惯量和良好的控制性能等优点,故被广泛地应用于自动控制系统和自动检测系统中作为执行元件,将控制电信号转换为转轴的机械转动。
由于伺服电机定位精度相当高,现代位置控制系统已越来越多地采用以交流伺服电机为主要部件的位置控制系统,本文的设计也正是用于喷印机的位置控制系统之中。
1 总体设计方案本控制系统选用松下MSMA082A1C型交流伺服电机,通过以单片机控制器实现对伺服电机的控制。
伺服电机的控制方式主要有位置控制、速度控制两种,为了提高其带动喷头运行的平稳性,选用了速度控制方式实现对伺服电机的控制,以利用伺服电机系统自带的S型曲线控制模型,达到理想的控制效果。
系统组成框图如图1所示,其中单片机控制器向伺服驱动器输出控制信号,再通过伺服驱动器驱动伺服电机按要求动作,同时,控制器接收固定在伺服电机转轴上的光电编码盘随着电机转动而产生的反馈脉冲信号,以实现对伺服电机带动的喷头运行位置的检测控制,形成闭环控制系统。
为了实现对喷印位置的精确控制,所以选用了分辨率为2000p/r的光电编码盘作位置传感单元,将伺服电机转轴的转角位置变换成电脉冲信号,以供单片机控制器对喷印位置进行跟踪控制。
2 伺服驱动器有关参数设置本系统选用了松下MINAS-A系列全数字式交流伺服驱动器MSDA083A1A(其主要性能指标为:电源电压为三相200V,适配电机的额定功率为750W,编码器类型为3000p/r)。
基于单片机的伺服电机控制系统设计

• 146•基于单片机的伺服电机控制系统设计郴州职业技术学院 张玲玲当今社会,电动机在工农业生产、人们日常生活中起着十分重要的作用。
其中,步进电机是最常见的一种控制电机,在各领域中:如加工中心,打印机、自动化生产线等等场合都可以得到应用。
研究伺服电机的控制系统,对提高控制精度和响应速度、节约能源等都具有重要意义。
本系统是基于80C51的伺服电机控制系统,在脉冲控制控制作用下控制电机运行于0-3000转/分钟,并实现正转与反转。
1 引言在自动控制系统中,伺服电动机作为执行元件,作用是把所收到的电信号转换成电动机轴上的角位移或角速度输出。
它有直流电机和交流电机之分。
其中交流伺服有更广的适用性。
交流伺服系统已成为当代高性能伺服系统的主要发展方向。
本文介绍如何使用C8051F060来控制交流伺服电机,使电机运行于0-3000转/分钟的任意转速。
2 系统设计图1所示是伺服电机控制系统,它以C8051F060为核心,同时还有显示电路、编码器、编码器处理电路、RS485通信电路、伺服电机驱动电路、伺服电机。
图1 伺服电机控制系统图3 电路及原理3.1 主芯片介绍C8051F060是Silicon Lab 公司出品的完全集成的混合信号片上系统型MCU 。
它使用了Cygnal 专利的高速、流水线结构以及与MCS-51指令集完全兼容的CIP251微处理器内核。
C8051F060具有P0-P7,共计8个端口,64个可以实际使用的IO 。
3.2 LED电路如图2所示,系统使用6个LED 数码管显示伺服电机的转速,LED 数码管采用MC14489芯片进行驱动,MC14489采用SPI 通信方式和CPU 进行通信,可以节省IO 口的使用。
3.3 编码器及处理电路系统采用多个BCD 拨码开关来设置系统运行参数。
BCD 拨码开关是十进制输入,BCD 码输出,又称为8421拨码开关。
每位BCD 拨码开关可输入1位10进制数。
每个BCD 拨码开关后面有5个接点,其中C 为输入控制线,另外4根是BCD 码输出信号线。
基于单片机的伺服电机控制系统的研究

1 总体 设计 方 案
系统 选 用 的 电机 是松 下 交 流伺 服 电机 , 过 单 通 片机控 制 驱动器 实 现对交 流伺 服 电机 的控制 。由独 立键 盘 输 入转 速 值 , 片 机把 转 速 值信 号 转换 为脉 单
STC1 C5 0 .Th s se 2 A6 S2 e y tm d sg icu e t e ad r d sg a d ot r d sg ein n ld s h h r wae e in n s f wae e in, whc c n r aie h s o h ih a e l t e mo t z
Vo _5 No. l3 1
Ma .Ol r2 2
基 于 单 片机 的伺 服 电机 控 制 系统 的研 究
李红伟 ,胡涛 ,徐 熙平 ,李沛松
(. 1 长春理工大学 摘 光 电工程学 院,长春 10 2 ;2 电信息控制和安全技术重点实验室 ,三河 30 2 . 光 050 ) 6 2 1 要 :介 绍 了- #g 5 S -  ̄ - TC1C5 0 2 片机 来实现控制 交流伺服 电机 的方案。该 系统设计 包括硬件设计和软件设计 , 2 A6 S 单
( c o l f t—Elcrnc gn eig Ch n c u iest f ce c n c n lg S h o o o Op e to isEn ie r , n a g h nUnv ri o in ea dTe h oo y, Ch n c u 3 0 2; y S a g h n1 0 2
c n r l o h AC s r o — t r s e d a d p st n o to f t e e v —mo o p e n o i o .Th c e a e n u e u c s f l n t e i e s h me h s b e s d s c e su l i h CCD c n i g i g y s a n n ma — ig y t m t a i b i o a u t b e M o o d i e t mt b e wh c c n e l e h d n mi s a n n i gn b n s se h t s ul n t m a l . t tr r s u a l, v ih a r a i t e y a c c i g ma i g y z n
基于单片机的交流伺服电机转速控制系统设计

嵌入式技术 电 子 测 量 技 术 EL ECTRON IC M EASU REM EN T TECHNOLO GY 第32卷第1期2009年1月 基于单片机的交流伺服电机转速控制系统设计张国斌 尹 岗(内蒙古工业大学信息工程学院 呼和浩特 010051)摘 要:设计一种单片机控制下的交流伺服电机转速系统,详细介绍它的硬件组成原理及其软件实现过程,实现了对通用交流伺服电机的速度闭环控制。
通过对实验结果的分析可以看出,本设计基本达到了系统对伺服电机转速控制的要求。
这种方法可以广泛应用于电子机械、纺织机械、印刷机械等诸多行业中。
关键词:单片机;交流伺服电机;速度控制中图分类号:TP368.1 文献标识码:ADesign of AC servo motor speed control system basedon the single2chip microcomputerZhang Guobin Y in G ang(Information Engineering College,Inner Mongolia University of Technology,Hohhot010051)Abstract:This paper designs a speed system of AC servo motor controlled by single2chip microcomputer.Details of its component of hardware and the process to realize of software.Realized its speed closed2loop control of a universal AC servo motor.Through the analysis on the experimental results,we can see,the design of this system reached the requirements to control the servo motor.This method can be widely used in electronic machinery,textile machinery, printing machinery and many other industries.K eyw ords:single2chip microcomputer;AC servo motor;speed control0 引 言伺服电机属于一类控制电机,分为直流伺服电机和交流伺服电机2种。
基于单片机的交流伺服电机运动控制系统研究

DOI:10.19551/j.cnki.issn1672-9129.2019.20.029基于单片机的交流伺服电机运动控制系统研究熊孝新 娄铮铮(郑州大学信息工程学院 河南 450001)摘要:随着科技的发展,运动控制器的出现为工业机器人及数控加工中心等自动化设备的运动控制提供了极大的便利,在数控系统中伺服控制器对系统性能影响可谓是最大的。
但当前市场上存在的各种控制器成本较高,所以在中小型数控系统的发展中,开发出一种成本较低,通用性和实时性高的运动控制器是极其重要的。
关键词:单片机;伺服控制器;运动控制系统中图分类号:TM383.4;TP273.5 文献标识码:A 文章编号:1672-9129(2019)20-0033-01Abstract:withthedevelopmentofscienceandtechnology,theemergenceofmotioncontrollerforindustrialrobotsandCNCmachiningcenterandotherautomaticequipmentmotioncontrolprovidesgreatconvenience,intheCNCsystemservocontrollerontheperform anceofthesystemcanbesaidtobethebiggestimpact.However,thecostofvariouscontrollersinthecurrentmarketisrelativelyhigh,sointhedevelopmentofsmallandmedium-sizednumericalcontrolsystem,itisextremelyimportanttodevelopamotioncon trollerwithlowcost,highuniversalityandreal-timeperformance.Keywords:SCM;Servocontroller;Motioncontrolsystem 前言:随着数字控制技术的发展,运动控制学已经是一个新兴的研究方向。
基于单片机的伺服电机转速控制系统

基于单片机的伺服电机转速控制系统摘要传统的晶闸管直流调速系统,其控制回路都是采用模拟电子线路构成的,晶闸管触发器多数还是采用分立元件组成的,这使得控制回路的硬件设备极其复杂,安装调试困难,相对故障率较高。
针对传统的晶闸管直流调速系统的一些不足,提出了一种基于单片机的伺服电机转速控制系统的设计方法,并介绍了PID控制算法的设计。
本设计使用AT89C52作为控制芯片,以PI(比例-积分)调节控制算法为基础,采用软件编程产生脉宽比可控的脉宽调制信号,再通过功率放大电路H桥驱动电路来控制伺服电机电枢电压,从而完成对伺服电机转速的调节,达到了较好的控制性能。
同时通过4*4小键盘输入设定的伺服电机转速,用光电编码器来测定伺服电机转速,显示在4位LED 上。
关键词:直流调速;PID控制算法;AT89C52;脉宽调制;伺服电机The Servo Motor Speed Control System Based On MCUAbstractThe conventional DC drive system of SCR, which Control loop is consisting of simulate electronic circuits, and the SCR trigger is mostly made up of the discrete component, so the hardware devices are extremely complex in the Control loop,the installation and trial run difficultly, the relative failure rate is high. To solve the problems, this paper presents one kind design method of the servo motor speed control system based on MCU, and introduces the design of the PID control algorithm.This design uses AT89C52 as the controller chip, takes PI (proportion - integral) regulation control algorithm to be the foundation, adopts software programming to get the signal for Pulse-Width-Modulation, and controls the armature voltage of servo motor through H bridge driving circuit in power amplification electric circuit, thus it completes to adjust the servo motor rotational-speed, and achieves the good control performance. Meanwhile it set s the servo motor rotational-speed through the 4*4 small keyboard, and minutes the speed of the servo motor by the optical encoder, then shows the speed of the servo motor on the 4 LED.Key word: Direct-current speed regulation; PID control algorithm; AT89C52;Pulse-Width-Modulation; Servo motor目录摘要 (I)Abstract (II)第一章引言 (1)1.1 课题的研究背景及意义 (1)1.2 转速控制系统设计目标及技术要求 (3)第二章伺服电机转速控制系统设计 (4)2.1 系统硬件组成原理 (4)2.2 PID控制算法简介 (4)2.2.1 位置式PID控制算法 (6)2.2.2 增量式PID算法 (8)第三章硬件部分的设计 (12)3.1 直流电机调速原理 (12)3.2 PWM波形发生电路 (13)3.2.1 PWM基本原理 (13)3.2.2 PWM信号的产生 (14)3.3 PWM功率放大电路 (15)3.3.1 H桥驱动电路原理 (15)3.3.2 PWM驱动电路原理图 (17)3.4 测速电路 (18)3.5 键盘电路 (19)3.6 LED显示电路 (21)3.7 AT89C52的时钟电路 (23)3.8 AT89C52的复位电路 (24)第四章软件部分的设计 (26)4.1 主程序流程 (27)4.2 PID控制算法程序流程 (28)4.2.1 PID控制算法选择 (28)4.2.2 PID运算控制模块子程序 (29)4.3 按键处理子程序 (30)4.4 键盘扫描程序 (31)4.5 转速采集子程序 (31)4.6 LED显示子程序 (32)结束语 (33)附录A 基于单片机的伺服电机转速控制系统电路图 (34)附录B 源程序 (35)附录C 基于单片机的伺服电机转速控制系统器件一览表 (57)参考文献 (58)致谢 (60)第一章引言1.1 课题的研究背景及意义目前单片机渗透到我们生活的各个领域,几乎很难找到哪个领域没有单片机的踪迹。
基于单片机的交流伺服电机转速控制系统研究

基于单片机的交流伺服电机转速控制系统研究赵 磊1,王哈力1,何绪锋2,周永勤1(1.哈尔滨理工大学 黑龙江哈尔滨 150040;2.淄博牵引电机集团公司 山东淄博 255100)摘 要:介绍基于ST C89C52RC 单片机实现非标准交流伺服电机控制的一种方案,提出一种基于控制继电器的闭合、断开而达到控制脉宽的大小。
通过硬件平台的搭建和软件程序,实现闭环控制非标准交流伺服电机滑动磁块的位移,以此控制磁场变化,达到控制电机转速的目的。
该方案在伺服电机转速精准的控制中得到了成功的应用,并且控制过程非常平稳,定位精确度很高,满足了工业现场的需要。
关键词:单片机;伺服电机;转速控制;模糊P ID 控制中图分类号:T P368 文献标识码:A 文章编号:1004-373X(2009)16-196-03Research on Control S ystem of AC Servo -motor Rotational Speed Based on Single C hip ComputerZH A O L ei 1,WA N G H ali 1,H E X ufeng 2,ZHO U Y ongqin 1(1.Ha rbin U ni v ersity o f Science &T echno log y,Ha rbi n,150040,China;2.Zibo Ci t y Drag s the Electric Mot or Conglo merate,Zi bo,255100,Chi na)Abstract :T he pa per pr ovides a scheme to co nt ro l no nstandard A C ser vo -moto r using sing le chip co mputer ST C89C52RC.A kind of contro lling t he size of pulse width based on clo sur e o r disconnection rela y is pro vided.A s a r esult,the feasibility of this system is ver ified by the constructio n of har dw are flat and im plementation of softw are,the close -lo op autonomic contro l displacement of g lide magnetism piece for o ff -standard AC Servo -moto r is implemented,then to contro l the change of magnetic field and it reaches the pur po se of co ntro lling ro tatio nal speed.T he sy stem is applied to the accurate contro l o f r otate speed of ser vo -motor is per for med successfully,which no t o nly can contro l process w ell,but also can go to posit ion accurately and satis -fy the needs o f industrial field.Keywords :single chip computer;ser vo -mo tor ;r otar y speed contro lling;fuzzy PI D co nt ro l收稿日期:2008-10-20基金项目:黑龙江省教育厅科学技术资助项目(11531031)伺服电机属于控制电机,它分为直流伺服电机和交流伺服电机两种。
基于单片机的伺服电机控制系统分析

基于单片机的伺服电机控制系统分析随着时代的发展社会的进步,科学技术水平日益提高,电动机被普遍应用到了人民的日常生活及工农业生产过程中,发挥了重要作用。
其中较为典型的控制电机应该是步进电机,在当前多个领域如打印机、加工中心、自动化生产线等均可得到有效应用。
本篇文章通过对系统软件的相关程序的设计、调试以及控制有关的参考数,对单片机的伺服电机的控制系统进行分析。
通过大量的实验和对比,来展现了单片机的伺服电机的控制情况良好。
标签:单片机;伺服电机;控制系统分析引言:当自动控制的系统启动时,单片机的伺服电机的马达能够发挥的主要作用是将电压的控制信号转化为机械位置,然后,接下来再把所收集到的电压信号转化为伺服电机的角位移,又或者是一定的转速。
因此,工作人员可以通过使用单片机来控制伺服电机。
单片机的伺服电机具有灵活、轻巧、体积小、控制方便等方面的优势,所以,伺服电机在现如今的生活之中深受到人们的热爱,从而在控制系统中可以得到广泛的应用。
一、单片机以及伺服电机的总论单片机本质上是一种集成电路芯片,又称微型控制器,单片机是一种由中央处理机、计时器、各种接口组合而成的集成电路芯片,简单来说,单片机就是一台小型的电脑,虽然体积小,但计算机和单片机的差别不是很大,并且,单片机具有的价格低廉的优势,所以作为小型家电控制器来说,单片机具有很高的性价比,单片机的运行是依靠程序来进行的,程序可以人为的进行修改[1]。
相比之下,单片机具有结构简单、灵活性强、体积小、储存方便、能耗少等优势,它在各种恶劣条件下都可以正常的运行,具有较强的环境适应力[2]。
近几年来,我国的计算机随着信息技术和尖端技术的快速发展,单机技术也得到了快速发展,它在家电、电子产品、机械产品等领域也得到了扩大和先进。
伺服电机是由控制部件运行的发动机,是其中的一种变速装置,伺服电机可以调节发动机的转动速度,以电压信号来控制,伺服电机的转动速度和输入信号有着密切的关系。
基于单片机的伺服电机控制系统

230 •电子技术与软件工程 Electronic Technology & Software Engineering单片机技术• SCM Technology【关键词】单片机 伺服电机 控制系统当自动化控制系统运行时,交流伺服电机的主要功能是把电压控制信号转变为机械位移,然后将接收到的电压信号转变为电机的一定转速或者是角位移,所以可利用单片机来对伺服电机的进行控制。
交流伺服电机的优点较多,其灵巧轻便、体积小,容易控制,因此,交流伺服电机受到人们的喜爱,广泛应用在控制系统之中。
1 单片机、伺服电机概述单片机是一种集成电路芯片,又叫做微型控制器,单片机是将中央处理器、定时器、各类接口都集成在一块集成电路芯片上的微型计算机。
简单来说,单片机就相当于一个小型电脑,体积虽小,但是与计算机并无大的差别。
单片机的价格低廉,因此将单片机作为小型家电的控制器具有非常高的性价比。
单片机的运行是依靠程序进行的,这种程序可人进行修改。
单片机与电脑中常用的微型处理器相比构造简单、更具灵活性、体积较小、便于存放、使用方便,并且能耗很低,可在各种恶劣的环境下正常运行,适应环境能力很强。
近年来,随着我国信息技术与高科技的飞速发展,单片机各方面也得到扩展和进步,被家用电器、电子产品、机械产品等广泛应用。
伺服电机是一种控制零部件运转的发动机,是变速装置的一种。
伺服电机可以控制发动机的转速,较为精准,利用电压信号进行控制。
伺服电机的转速与输入信号密切相关。
伺服电机主要分为两大类,即交流电机以及直流电机。
伺服一般情况下都是通过脉冲定位,当伺服电机收到一个脉冲后,就会相对应的转动一个脉冲的角度,从而实现位置的变化,伺服电机本身能够发出脉冲,因此,伺服电机每发生一次位移,都会发出和位移角度相对应的脉冲,这样电机接收和发出的脉冲形成闭环。
2 总设计方案在本次研究之中,所选用的是松下交流基于单片机的伺服电机控制系统文/张靖辉伺服电机,根据单片机的工作原理来实现对松下伺服交流电机的控制。
基于单片机的伺服电机控制系统的研究

1 总体 方 案 的设 计
系 统的零点 定位是 以编码 器的 z脉 冲信 号 EZ和原点 近位信 号
ORG作为判 断原 点的决定条件 Ez信号是编码 器的 z脉冲 .通 常情
该系统选用 的是松下 A5系列 的单轴交 流伺服 电机 .电机的驱动 况下 电机转 动到 360o的位置 时就产生一个 z脉冲 .也就 是说 .电机每
机发 出的位 置指令 信号,经电子齿 轮分倍 频后,在偏差可逆计 数器中与 反馈脉 冲信 号比较后 形成偏 差信 号 反馈脉冲是由编码器检测到的脉
该系统用 c语言编程,程序简单易懂。l
冲数 经 4倍 频后产生的 位 置偏差信号经位置环 的反馈 调节 后,形成速
【参 考文献 】
度指令信号 速度 指令信号与速度反馈信号 的偏差信号.经速度 环 比 [1]STC12C5A60S2系列单片机器件手册『M1.2011.
电机 。
率对应 的定 时器初值及其 步数计算好 .并 固定在 ROM 中.系统 运行时
交 流伺服 电机 的控 制方式 有三种 :位置 控制 、速度 控制 、转矩 控 用查 表法查 出各 自对应 的初值 即可 这样大 大减 少 了 CPU的计算时
制 。系统选用位置控制方式 .在位置控制方式下 .伺服驱动器接收单片 间 .提 高系统 的响应 速度。降速也 是如此。
fl=11.0592MHZ
单片机默认为 1T模式 .所 以一个 时钟周期 Tcv=1/1 1059200 在
伺服 电机 的控制 STC单片机的 P2.0输 出脉冲控制转速 .P2.1输 出方 这里使用定时器模式 1.定时时 间 t、定时器应装入 的初值 N。
向脉 冲控制转 向 2.2 伺服 电机及驱动的硬件设计
基于单片机的交流伺服电机控制

05
系统调试与性能测试
系统调试方法与步骤
硬件调试 电源检查:确保电源电压稳定且符合要求。
连接线路检查:确保线路连接正确,无短路或断路现象。
系统调试方法与步骤
• 元器件检查:检查电阻、电容等元器件是否正常工作。
系统调试方法与步骤
软件调试
程序语法检查:确保程序语法 正确,无编译错误。
逻辑错误检查:通过模拟输入 信号,检查程序逻辑是否正确 。
总结词
交流伺服电机驱动器是实现电机控制的关键环节,其设计将直接影响电机的性能和稳定性。
详细描述
在驱动器设计中,需要根据电机的规格参数和性能要求,选择合适的驱动电路和功率器件,并考虑驱动器的抗干 扰性能和保护措施。此外,还需要对驱动器的控制信号进行合理设计,以确保电机能够准确、快速地响应控制信 号。
控制算法设计
总结词
控制算法是实现电机精确控制的关键技术,其设计将直接影响电机的运动特性和控制精度。
详细描述
在控制算法设计中,需要根据电机的运动特性和性能要求,选择合适的控制算法,如PID控制、模糊 控制、神经网络控制等。同时,还需要对控制算法的参数进行合理调整和优化,以提高电机的控制精 度和响应速度。
03
硬件电路设计与实现
基于单片机的交流 伺服电机控制
2023-11-10
目录
• 交流伺服电机控制概述 • 基于单片机的交流伺服电机控制
方案设计 • 硬件电路设计与实现 • 软件程序设计与实现 • 系统调试与性能测试 • 基于单片机的交流伺服电机控制
展望与优化建议
01
交流伺服电机控制概述
交流伺服电机的基本原理
交流伺服电机是一种基于电磁 感应原理的电动机,主要由定 子和转子组成。
单片机 伺服电机
单片机伺服电机单片机是一种集成电路,可以完成特定任务的计算机系统。
伺服电机是一种能够根据控制信号精确地调整输出轴位置的电机。
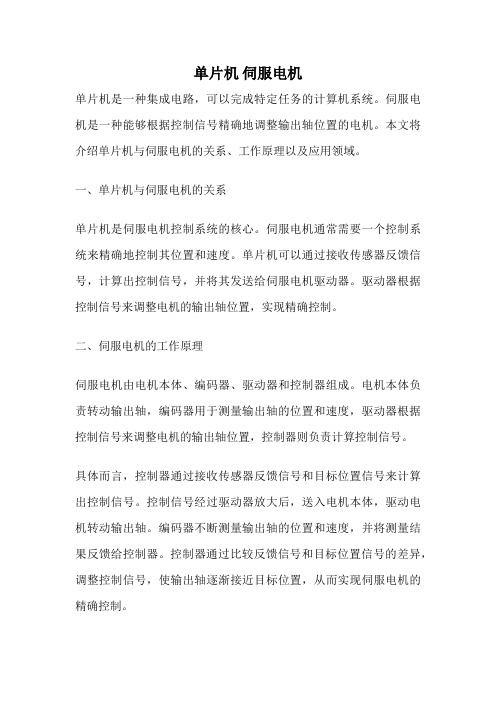
本文将介绍单片机与伺服电机的关系、工作原理以及应用领域。
一、单片机与伺服电机的关系单片机是伺服电机控制系统的核心。
伺服电机通常需要一个控制系统来精确地控制其位置和速度。
单片机可以通过接收传感器反馈信号,计算出控制信号,并将其发送给伺服电机驱动器。
驱动器根据控制信号来调整电机的输出轴位置,实现精确控制。
二、伺服电机的工作原理伺服电机由电机本体、编码器、驱动器和控制器组成。
电机本体负责转动输出轴,编码器用于测量输出轴的位置和速度,驱动器根据控制信号来调整电机的输出轴位置,控制器则负责计算控制信号。
具体而言,控制器通过接收传感器反馈信号和目标位置信号来计算出控制信号。
控制信号经过驱动器放大后,送入电机本体,驱动电机转动输出轴。
编码器不断测量输出轴的位置和速度,并将测量结果反馈给控制器。
控制器通过比较反馈信号和目标位置信号的差异,调整控制信号,使输出轴逐渐接近目标位置,从而实现伺服电机的精确控制。
三、单片机与伺服电机的应用领域单片机与伺服电机的组合广泛应用于各个领域,如工业自动化、机器人、航空航天等。
在工业自动化领域,单片机与伺服电机的组合可以实现精确的位置和速度控制,广泛应用于自动化生产线、物流系统等。
例如,在汽车生产线上,单片机可以控制伺服电机精确调整汽车零部件的位置,提高生产效率和产品质量。
在机器人领域,单片机与伺服电机的组合可以实现机器人的运动控制。
机器人可以根据预设的程序,精确地控制伺服电机的位置和速度,完成各种复杂的任务。
例如,在装配线上的机器人可以使用单片机控制伺服电机,将零部件精确地装配在一起。
在航空航天领域,单片机与伺服电机的组合可以实现飞机的舵机控制。
舵机是飞机控制系统中的重要组成部分,用于控制飞机的姿态。
单片机可以通过控制伺服电机的位置,实现对舵机的精确控制,从而控制飞机的姿态。
基于单片机的伺服电机控制系统设计

基于单片机的伺服电机控制系统设计近年来,随着科技的进步和工业自动化的发展,伺服电机在工业控制系统中的应用越来越广泛。
伺服电机具有精准的位置控制、快速的响应速度和高功率输出等特点,被广泛应用于机器人、数控机床、自动化生产线等领域。
伺服电机控制系统一般由意图生成、控制器和执行器三个部分组成。
其中,意图生成部分主要负责根据控制要求生成输出信号;控制器负责接收输入信号并处理,然后输出控制信号;执行器负责接收控制信号并执行动作。
首先,确定伺服电机的控制要求,包括位置精度、响应速度等。
然后根据要求设计控制器。
控制器可以采用PID控制算法,结合反馈信号进行控制。
在STM32控制器中,可以使用定时器模块的PWM输出来控制电机的转速和方向。
在意图生成部分,可以通过外部设备、按键或编码器等和STM32进行通信,将期望的位置或角度输入到STM32、STM32接收到输入信号后,经过处理后输出控制信号。
在执行器部分,可以选择合适的伺服电机,根据控制信号驱动电机执行动作。
执行器部分可以使用相应的驱动电路来完成。
在整个系统设计过程中,需要注意以下几个方面:
1.系统的稳定性:选择合适的控制算法,在系统中加入合适的反馈信号,使系统具有较好的稳定性和鲁棒性。
2.控制精度:通过合适的传感器和控制算法,保证伺服电机的位置控
制精度和响应速度。
3.电路的设计:合理设计电路,保证信号的稳定性,避免干扰和噪声。
4.保护措施:考虑到伺服电机使用中可能出现的故障,可以加入相应
的保护措施,如过流、过热等保护。
AVR单片机控制伺服电机实验
AVR单片机控制伺服电机实验机器人与创新制作系列实验实验目的伺服电机也称舵机是机器人和创新活动中必不可少的电子驱动设备。
用单片机控制伺服电机也并不难,而且BASCOM 的BASIC中就有专门配置伺服电机的语句,大大简化了编程的难度。
关键词:单片机控制伺服电机程序难度等级:中级硬件搭建使用超简单单片机实验套材中的AVR主板控制伺服电机是一件非常简单的事。
标准的伺服电机有一根三位的引线,一般白色的为信号线,中间的红色接+5V,黑色的接地。
AVR主板的端口C也正是为了配合方便插接伺服电机而设计。
只要将伺服电机的三位引线插入C端口的一组引脚即可,其位置正好是:信号、+5V、地。
本实验使用了C端口的引脚0。
实验中使用的是TowerPro SG-50伺服电机。
程序代码'----------------------------------------------------------------------------------------------------$regfile = "m48def.dat"$crystal = 8000000Config Servos = 1 , Servo1 = Portc.0 , Reload = 10Config Portc.0 = OutputEnable InterruptsDim I As ByteDoFor I = 50 To 150 Step 1Servo(1) = IWaitms 100NextFor I = 150 To 50 Step -1Servo(1) = IWaitms 20NextLoopEnd'目标单片机为ATmega48'使用内部8M晶振'配置使用定时器0产生控制脉冲,'端口PORTC.0作为伺服电机控制端口,'定时器0的重装间隔为10微妙'配置端口PORTC.0输出'使能全局中断,因为定时器0要使用中断'''以I*10微妙的脉冲宽度控制伺服电机'最初是50*10=0.5ms,最终是150*10=1.5ms'脉冲变化的速度为100ms'''从1.5ms点返回到0.5ms点''返回时速度较快,为20ms间隔''程序讲解伺服电机配置语句BASCOM的BASIC为AVR单片机控制伺服电机设计了专门的配置语句。
基于PIC单片机的交流伺服电机控制系统研究

收 稿 日期 :2007—07—22 作 者 简 介 :曹 昌勇 (1978一).男 ,安 徽 贵池 人 ,助 教 ,硕 士 。
维普资讯
·116 ·
机 械 工 程 与 自 动 化
2007年 第 6期
选 用 的是脉 冲数为 2 500脉 冲/r、分辨率 为 10 000的增 量 式光 电编码 器 ,因为该 编码器 构造 简单 、平 均寿命 长 、分辨 率高 。 2.1 各 硬 件 之 间 的 连 接
维普资讯
第 6期 (总 第 145期 ) 2007年 12月
机 械 工 程 与 自 动 化 M ECHANICAL ENGINEERING & AUTOM ATION
文章 编号 :1672—6413(2007)06—0115—03
No.6 DeC.
控 制下 ,伺服 驱动 器接 收单片机 发 出的位 置指令 信号 转产 生 的脉 冲数控制 。编码 器 可 以直接 把被测 转 角或
(脉冲/方 向),送人 脉 冲系列 形态 ,经 电子 齿轮分 倍频 位移 转换 成相应 的代 码 ,指示 的是绝 对位 置 而且 没有
后 ,在偏 压可逆 计数 器 中与反馈 脉 冲信 号 比较形 成偏 累积误 差 ,在 电源切 断后 位置信 息也 不 会丢失 。这 里
基 于 PIC单片机 的交流伺服 电机 控制系统研 究
曹 昌勇 ,杨 贵 荣
(皖 西 学 院 机械 与 电子 工 程 系 , 安 徽 六 安 237012)
摘 要 :介 绍 了基 于 PIC18F458单 片机 实 现交 流伺 服 电机 控制 的 一 种 方 案 ,能 实 现 对伺 服 电 机 运 转 的 平 稳 控 制 。 该 方 案 在 电机 消 防炮 转 角 控 制 中得 到 了成 功 的应 用 ,并 且 控 制 过 程 非 常 平 稳 ,定 位 精 确 度 也 很 高 。
基于单片机的伺服电机控制系统

第一章绪论 (2)1.1课题研究的目的和意义 (2)1.2国内现状与发展趋势 (2)1.3伺服电机发展历史 (3)2.2伺服电机工作理 (4)第二章伺服电机控制硬件设计 (5)2. 1 AT89C51单片机硬件结构 (5)2.2钟电路设计 (8)2.3复位电路设计 (8)2.4显示电路设计 (8)2.5按键电路设计 (11)2.6控制伺服电机电路设计 (12)第三章系统软件设计 (14)3.1总体设计思想 (14)3.2主程序设计 (15)程序清单 (16)参考文献 (18)半个世纪来,直流伺服控制系统己经在精密数控机床、加工中心、机器人等领域得到了广泛的应用。
随着伺服电动机技术、电力电子技术、计算机控制技术的发展,使得伺服控制系统朝着控制电路数字化和功率器件的模块化的方向发展。
本文介绍了微机直流伺服系统的硬件、软件设计方案。
硬件设计主要包括:总体方案设计、单片机应用系统设计、驱动电路设计和测量电路设计。
软件编制采用模块化的设计方式,主要包括主程序设计及数字控制算法程序的设计。
通过系统的整体设计,完成了系统的基本要求,系统可以稳定的运行。
关键词:伺服系统单片机Abstract For a half of century, the DC servo control system has been widely used in the NC machine tool, machining center, and robot. , etc. With the technical development of servo motor, electronices power and computer control, the servo control system is making towards digitized and modular design. This paper introduces the hardware, software design plan of DC servo control system on microcomputer. The hardware designed includes mainly: the total project design, single-chip computer application system design, drive circuit design and measure circuit design. The software a dots modular design, includes primarily the main procedure design and increases the design of the deal type arithmetic figure PID calculation way procedure. Through the integral design of the system, the completion of the basic requirements of the system, the system can stable operation Keywords: servo system microcontroller第一章绪论1.1课题研究的目的和意义近年来随着物流仓储设备的快速发展,有很多物流仓储设备都选用多功能工 业门机作为大宗货物进出仓库的阀门。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
基于单片机的交流伺服电机控制研究
【摘要】设计一种单片机控制下的交流伺服电机转速系统,详细介绍它的硬件组成原理及其软件实现过程,实现了对通用交流伺服电机的速度闭环控制。
通过对实验结果的分析可以看出,本设计基本达到了系统对伺服电机转速控制的要求。
【关键词】单片机交流伺服电机
由于交流伺服电机具有体积小、重量轻、大转矩输出、低惯量和良好的控制性等优点,因此已被广泛应用于自动控制系统和自动检测系统中。
在自动控制系统中,交流伺服电机的作用是把控制电压信号转换成机械位移,也就是把接收到的电压信号转变成该电机的一定转速或角位移,因此可以用单片机实现对伺服电机的控制。
1 总线驱动、数据、地址锁存及译码电路
由于单片机的数据线和低位地址线共用必须加地址锁存器进行低位地址锁存,使用74L5373作为地址锁存器,当应用系统规模过大,扩展所接芯片过多,超过总线的驱动能力时,系统将不能可靠工作,此时应加用总线驱动器来减少读数据的持续时间,使用74LS245作数据驱动器整个系统可扩展的外部数据总共为64K,由于单片机外部数据存贮器和I/O是统一编址的,我们将低32K作为外部扩展的数据存储器,高译码电路采用两片74LS138用了32K作为I/O使用或留给以后扩展用74LS21,74LSll构成。
控制系统采用P89C58单片机作为控制系统处理器,该系列单片机默认1T 模式,运算速快,片上集成1280字节RAM,60K的flash程序存储器,还有EEPROM,可使系统结构更为简单、实用电机选用的是松下的MSMD5AZG1U 型交流伺服电机,额定输出功率50W,内置20位的增量式光电编码器。
驱动器选用的是松下的MINASA5系列交流伺服驱动器MADHT 1505E。
伺服驱动器连接器X4(50脚)作为外部控制信号输入、输出接口,可以接收控制器发送给驱动器的控制指令。
交流伺服电机的控制方式有三种:位置控制、速度控制、转矩控制。
在位置控制模式下,驱动器接收单片机的位置控制指令信号,经电子齿轮分倍频后,在偏差可逆计数器中与反馈脉冲信号比较后形成偏差信号。
反馈脉冲是由编码器检测到电机所产生的脉冲数,经四倍频后产生的。
位置偏差信号经位置反馈控制器调解后,形成速度指令信号。
速度指令信号与速度反馈信号比较后形成偏差指令信号,经速度环比例积分器调解后,产生电流指令信号,在电流环中经矢量变换,从SPWM输出转矩电流,控制伺服电机运转。
位置控制精度由编码器每转一周产生的脉冲数控制。
编码器分为增量式光电编码器和绝对式光电编码器。
本文采用的是增量式光电编码器,其特点是构造简单、易于掌握、平均寿命长、分辨率高,应用比较多。
2 数据存储器读校验
数据存储器的地址线高位直接与P89C58的P2口相连,低位与地址锁存器相连,数据线与驱动器相连,读写控制与另一个驱动器相连.由P89C58的芯片资料可知。
tCLCL:为系统的时钟周期,我们采用的是22.1148Mz的时钟,可知系统的时钟周期tCLCL为45.22ns。
Trlrh:系统读脉冲宽度,Tclrh=6tclcl—100ns
Trldv:系统最大读低有效到数据有效输入的时间
Trldv=5×tclcl-90ns=5×45.22-90ns=136.1ns
3 伺服控制器的软件设计
本系统的软件分上位机管理显示软件和下位机控制软件,上位机的软件主要完成用户接口和文档管理,通讯显示等功能,采用Windows平台的visual C++编写,下位机控制软件不仅包括系统初始化程序,通讯程序,而且还包括实时性要求很高的中断服务程序,整个系统的软件。
上位机软件:上位机主要完成用户程序的编辑,文件管理通讯等用户接口程序。
良好的用户接口是系统优劣重要参数,我们使程序的编辑功能具有类word 功能的一个编辑器,机床一些状态参数显示在上位机是以指示灯的形式出现,由按扭启动通讯,通讯状态使用状态符,动态显示。
由于时间关系,我们只完成上位机程序一部分功能。
4 结语
在对数字式位置伺服系统结构介绍的基础上,分析了交流同步伺服电动机的结构和工作原理,基于P89C58单片机的转速测量系统,具有硬件电路简单,程序编程简单和运算速度快,测速范围宽,抗干扰性好的特点。
在设计的信号处理电路中经过滤波,能够进一步减少误差,使测速精度得到提高。