机器人现场编程-工件搬运示教编程
工业机器人现场编程-示教器使用
工业现场编程-示教器使用工业现场编程-示教器使用1.引言1.1 目的1.2 背景1.3 示例案例2.示教器简介2.1 示教器功能概述2.2 示教器基本操作说明2.2.1 示教器启动和关闭2.2.2 示教器屏幕布局2.2.3 示教器按键功能说明2.2.4 示教器输入输出接口3.控制系统接口3.1 连接示教器和控制系统3.2 示教器与控制系统之间的通信设置3.3 示教器与控制系统的兼容性4.示教器编程功能4.1 示教器编程模式概述4.2 示教器编程语言介绍4.3 示教器编程步骤详解4.3.1 示教器编程环境设置4.3.2 示教器编程指令使用说明 4.3.3 示教器程序的创建与编辑 4.3.4 示教器程序的调试与执行 4.4 示教器编程技巧和注意事项4.4.1 充分利用示教器提供的功能 4.4.2 编写清晰、简洁的程序4.4.3 避免示教器编程常见错误5.示例案例5.1 示例案例一:装配过程5.1.1 任务描述5.1.2 程序设计与编写5.1.3 执行效果和调试过程5.2 示例案例二:焊接操作5.2.1 任务描述5.2.2 程序设计与编写5.2.3 执行效果和调试过程6.附件6.1 示教器使用手册6.2 示教器编程示例代码6.3 相关图片和图表附录1.法律名词及注释- 示教器:指用于在现场对工业进行编程和控制的设备。
- 控制系统:指用于控制工业运动和操作的软件和硬件系统。
- 调试:指对示教器程序进行测试和调整,以确保其正常执行的过程。
- 兼容性:指示教器与控制系统之间能够正常通信和配合使用的程度。
机器人现场编程-川崎机器人示教-综合命令

机器人现场编程-川崎机器人示教-综合命令机器人现场编程川崎机器人示教综合命令在当今制造业的快速发展中,机器人的应用日益广泛。
机器人现场编程成为了实现机器人高效、精准作业的关键环节。
其中,川崎机器人以其出色的性能和灵活的编程方式备受青睐。
而川崎机器人示教中的综合命令更是为机器人的复杂操作提供了强大的支持。
川崎机器人的现场编程,是将我们的生产需求转化为机器人可执行的动作序列的过程。
这不仅需要对机器人的基本原理和结构有深入的理解,还需要掌握相应的编程技巧和工具。
在这个过程中,示教编程是一种常见且直观的方式。
所谓示教编程,就是操作人员通过手动引导机器人的动作,机器人会记录下这些动作的轨迹、速度、姿态等信息,然后将其转化为程序代码。
而综合命令则是在示教编程的基础上,进一步整合和优化各种操作指令,以实现更复杂、更高效的机器人作业。
综合命令的一个重要特点是它的集成性。
它将多个单一的指令组合在一起,形成一个功能更强大的复合指令。
比如,在进行物料搬运的任务中,可能需要机器人先移动到指定位置,抓取物料,然后再移动到另一个位置放下物料。
通过综合命令,可以将这一系列的动作整合为一个指令,大大简化了编程的过程,提高了编程的效率。
另一个显著的优点是综合命令的灵活性。
它可以根据不同的生产需求和工况进行定制和调整。
比如,在机器人的运动速度方面,可以通过综合命令设置不同的速度模式,以适应不同的作业要求。
在精度要求较高的场合,可以降低速度以提高精度;而在对效率要求较高的情况下,则可以适当提高速度。
在实际应用中,综合命令还具有良好的可重复性。
一旦编写好一个综合命令,只要生产条件和要求没有发生大的变化,就可以多次重复使用。
这不仅节省了编程的时间,还保证了机器人作业的一致性和稳定性。
为了更好地运用川崎机器人的综合命令进行现场编程,我们需要熟悉相关的编程软件和操作界面。
川崎机器人通常配备有专门的编程软件,其中包含了丰富的指令库和工具。
通过这些工具,我们可以方便地创建、编辑和调试综合命令。
工业机器人项目三 工业机器人搬运工作站现场编程
任务二 设定搬运工具
图3-26 Rz回转角度设置
任务二 设定搬运工具
图3-27 Ry回转角度设置 图3-28 Rx回转角度设置
三、工具重量信息的设定
任务二 设定搬运工具
图3-29 工具的重量信息
任务二 设定搬运工具
图3-30 工具一览画面
任务二 设定搬运工具
图3-31 工具坐标画面
四、工具重量和重心自动测定
任务三 示教搬运工作站程序
2.安全开关
图3-38 外部急停电路图
任务三 示教搬运工作站程序
3.外部伺服ON
图3-39 安全开关的连接
任务三 示教搬运工作站程序
图3-40 外部伺服ON的连接
4.外部设备控制机器人暂停
任务三 示教搬运工作站程序
图3-41 外部暂停电路图
5.I/O使用外部电源的接线
2.机器人输出与PLC输入接口电路
任务三 示教搬运工作站程序
图3-47 机器人输出与PLC输入接口电路图
3.机器人输入与PLC输出接口电路
任务三 示教搬运工作站程序
图3-48 机器人输入与PLC输出接口电路图
4.机器人专用输入接口MXT电路
任务三 示教搬运工作站程序
图3-49 机器人专用输入接口MXT电路图
5.机器人输出接口电路
任务三 示教搬运工作站程序
图3-50 机器人输出接口电路图
六、搬运工作站控制程序示例 1.搬运工作站PLC程序
任务三 示教搬运工作站程序
图3-51 搬运工作站PLC程序
2.搬运工作站机器人程序
任务三 示教搬运工作站程序
表格
任务三 示教搬运工作站程序
表格
任务三 示教搬运工作站程序
工业机器人编程与操作 任务3 工业机器人简单搬运程序的编制
任务3工业机器人简单搬运程序的编制
【知识准备】
(2)写操作。 DO[ i ]=ON/OFF指令把ON= 1 / OFF=0赋值给指定的数字输出信号。 指令结构为DO[ i ] = (value) DO[ i ]中的i表示数字输出端口号;(value)为ON表示发出信号;(value)为OFF表示 关闭信号。 示例:Y[01.0]=ON;Y[01.1]=OFF
任务3工业机器人简单搬运程序的编制
【知识准备】
(二)I/O指令
I/O指令即PLC输入/输出指令,用于设置信号输出状态和读取输入信号。 1.数字量输入/输出指令 (1)读操作。 数字量输入DI(X),数字量输出DO(Y)。 R[ i ]=DI[ i ]即R[ i ]= X[ i ] R[ i ]=DI[ i ]指令把数字输入信号赋值给指定的R寄存器。 其结构为R[ i ] = DI[ i ] R[ i ]中的i表示寄存器序号;DI[ i ]中的i表示数字输入的端口号。 示例:R1=X[2.3]
【技能目标】
(1)能够根据搬运任务进行工业机器人运动规划。 (2)能够灵活运用工业机器人的相关编程指令,使用示教器完成搬运程序的示 教。 (3)能够完成搬运程序的调试和自动运行。
任务3工业机器人简单搬运程序的编制
【学习思路】
• 一 知识准备
任务3工业机器人简单搬运程序的编制
【知识准备】
(一)工业机器人搬运工艺分析
任务3工业机器人简单搬运程序的编制
【知识准备】
(7)减少物料移动方位的不确定性,使其按期望的方位移动。对于有特殊要求 的物料,尤其要考虑移动方位。
(8)在追求效率的同时,要考虑搬运质量,防止损坏物料,酌情设置快速移动 和缓慢移动,合理提高搬运效率。
机器人现场编程AS语言示教码垛编程(改)课件

AS语言语法
01
AS语言采用类似于C语言的语法结构,包括变量声 明、条件语句、循环语句等。
02
AS语言支持自定义函数和模块,方便程序员封装和 复用代码。
03
AS语言对代码格式和缩进要求严格,以提高代码的 可读性和可维护性。
AS语言数据类型
01
AS语言支持多种数据类型,包括整型、浮点型、布尔型、字符 串型等。
02
此外,AS语言还支持数组、结构体等复合数据类型,方便程序
员处理复杂的数据结构。
AS语言支持类型转换,允许程序员在必要时将不同类型的数据
03
进行转换。
AS语言控制结构
01
AS语言支持条件语句(if-else )、循环语句(for、while) 等控制结构,方便程序员实现 复杂的逻辑控制。
02
AS语言还支持多线程编程,允 许程序员同时控制多个机器人 或执行多个任务,提高生产效 率。
03
AS语言提供异常处理机制,帮 助程序员处理程序运行过程中 可能出现的错误和异常情况。
03 机器人示教编程
机器人示教编程概念
机器人示教编程是指通过手动操作机 器人,记录下机器人的运动轨迹和姿 态,并将这些信息转换为机器人的程 序代码,从而实现自动化生产的过程 。
优化程序
根据调试结果,对程序进行优化和调整,提高机器人的工作效率和安 全性。
机器人现场编程优化
程序性能优化
针对机器人的运动轨迹和搬运逻辑进行优化,提高机器人的运行 速度和稳定性。
系统集成优化
将机器人与其他自动化设备进行集成,实现更高效的生产线作业, 提高整体生产效率。
《工业机器人编程及应用》搬运工作站操作编程实验
《工业机器人编程及应用》搬运工作站操作编程实验一、实验目的和要求1、学会程序的创建、选择、复制、删除,以及查看程序属性;2、掌握以下程序编辑功能:插入指令、复制/粘贴指令、删除等;3、掌握动作指令及简单控制指令,能根据需要修改指令的各项内容;4、掌握示教编程方法,以及物料搬运编程的技巧;5、掌握顺序及逆序手动执行程序的方法。
二、实验内容和原理1、机器人搬运工作站__________是指利用一种设备握持工件,从一个加工位置移动到另一个加工位置的过程。
如果采用__________来完成这个任务,整个搬运系统则构成了工业机器人搬运工作站。
为搬运机器人安装不同类型的__________,可以搬运不同形态和状态的工件。
机器人搬运工作站包括:__________、PLC、__________、料库、传送装置、托盘,并与生产控制系统相连接,以形成一个完整的集成化的搬运系统。
2、机器人应用程序程序中包含了一连串控制机器人的__________,执行这些__________可以实现对机器人的控制操作。
程序除了记述机器人如何进行作业的程序的信息外,还记述了对程序属性进行定义的程序的__________:创建日期、修改日期、复制源、位置数据、__________等与属性相关的信息,以及__________、子类型、__________、组掩码、写保护、忽略暂停、堆栈大小等与执行环境相关的信息。
3、动作指令动作指令是指以指定的__________和__________使机器人向作业空间内的__________移动的指令。
动作指令的一条语句包含__________、__________、__________、__________、动作附加指令等信息。
动作指令中至少需要指定其中四个要素:__________、__________、__________、__________。
__________动作“J”是指工具在两个指定的点之间任意运动,不进行轨迹控制和姿势控制,移动轨迹通常为非线性,以机器人最自然的方式移动。
项目三 KUKA工业机器人搬运编程与操作

(6)示教:P3点 手动操作机器人移动到P3点,将光标移至 第7行,点击示教界面下边【上一条指 令】,继续添加指令PTP,点击示教界面 右下角【OK】软键完成P3点示教。
(7)示教:P4点 手动操作机器人移动到P4点,将光标移至第 8行,点击示教界面下边【上一条指令】,继 续添加指令PTP,点击示教界面右下角【OK】 软键完成P4点示教。
(12)示教:P10点
(13)示教:P11点
手动操作机器人移动到P10点,将光标移至 手动操作机器人移动到P11点,将光标移至
第16行,点击示教界面左下角【指令】→ 第18行,点击示教界面左下角【指令】→
【运动】→【PTP】,添加指令PTP,点击 【运动】→【LIN】,添加指令LIN,修改速
示教界面右下角【OK】软键完成P10点示教。度为0。1m/s,点击示教界面右下角【OK】
(2)示教:回HOME点
使用示教器手动操作机器人移动到合适位置,作为机器人 的HOME点。将光标定位在HOME程序行,点击示教器界面 左下角【更改】软键,将HOME点名称改为HOME5,因为 HOME是全局变量,会影响其它程序的初始位置。
点击HOME5后黑色三角形设定 工具坐标系和基坐标系
点击示教器界面右下角【OK】软 键,弹出对话框,点击【是】接纳坐 标系修改,继续弹出对话框,点击 【是】采用此点作为HOME5点,同 时完成第4行PTP命令的修改。同样 地,将默认的第6行命令中HOME点
软键完成P11点示教
(14)示教I/O:气爪打开 添加OUT指令,将气爪打开,工件 放置于堆垛区指定地点
(15)示教等待 为确保气爪可靠打开,添加WAIT延 时指令。
(16)示教:P12点,HOME 参照P10点,用LIN命令示教P12点; 用PTP命令回归HOME点,完成机器 人从堆垛区放置工件过程,完成搬运 任务。
机器人示教编程

机器人示教编程》教学与实训软件
招(投)标技术参数
、简介
《机器人示教编程》是浙大旭日科技与广州数控合作开发的虚拟仿真教学与实训软件。
它采用浙大旭日科技首创的双屏(双系统)协同操控等技术,以前所未有的真实感、趣味性、安全性、便利性,创造出全新的教学与实训体验,拥有大量的项目化案例,为其提供多元化的实训方式,显
著提升效果、降低成本。
是机电一体专业建设的重要组成部分和亮点。
《机器人示教编程》软件从以下五个方面进行详细介绍:一、下象棋;二、绘画;三、上下料;四、焊接;五、码垛。
二、优势与特色趣味性:首创分屏操作模式,将示教器与机器人本体分别显示在平板电脑(PAD)和PC机屏幕上,PAD端与PC端实现无线连接和操控,不仅解决了现有仿真软件中机器人本体被示教器遮挡的问题,还极大地增加了机器人仿真教学的趣味性。
2)真实感:以机器人生产厂家提供的典型机床型号为原型,进行高仿真建模,结构完整、模型逼真。
同时,拥有高度逼近真实的表面外观和细节感受,创造出身临其境般的实训体验。
3)项目化教学案例:针对虚拟机器人示教编程仿真实训的需求,精心设计典型的机器人示教编程项目化教学案例,均可直接用于仿真实训,完成不同的虚拟实训任务。
工业机器人现场编程流水生产线的搬运、码垛运动编程
点回到机器人HOME4点。
摆放物料轨迹
摆放过程编程步骤
1)创建摆放物料的子程序模块,命名为xie1,并将全局变量HOME4点作为此次示教 的HOME点。
创建摆放物料程序模块
2)添加机器人从P1点到P4点的程序命令。 3)机器人运动到P2点时放下物料,应使抓爪打开,添加OUT指令,设定值为FALSE。
机器人从P1-P4点运动编程
添加使抓爪打开命令
4)添加逻辑指令WAIT使工具抓爪在离开P2点之前有充足的时间放下物料。 5)机器人整个摆放过程程序编写如下右图所示。
添加WAIT指令
摆放过程程序
卸垛过程主程序编写步骤
1)创建卸垛过程的主程序模块xieduo1,然后删除两行PTP HOME指令。
因为子 程序中
流水生产线的搬运、码垛运动编程
学习目标和技能
• 学习目标 ① 掌握在专家界面进行搬运和码垛程序编写的知识 ② 利用主程序调用子程序方式实现搬运与码垛功能 ③ 在T1和T2以及自动运行方式下测试程序
• 学习建议 做好知识准备工作,具备在专家界面上进行编程以及
主程序调用子程序的相关知识,操作机器人,完成实训内
添加WAIT指令
取料过程程序编写
摆放过程
轨迹路线:
HOME点→P1→P2→P3→P4→HOME点
轨迹描述:
机器人以HOME4点为起点,经过安全点P1,到达 摆放取料点P2,此时,打开工具抓爪,稍微等待一点
P抓爪在离开P2点之前有充足的时间放下物
P2
料,然后离开P2点,来到安全点P3点,再经过中间点4
任务描述
码垛分为卸垛和堆垛,物料的卸垛就是机器人将物料 从物料库取出,依次放在卸垛区(物料托盘上)的过程, 物料的堆垛就是机器人将物料从堆垛区(物料托盘)抓起, 依次放入物料库的过程。本节以卸垛过程为例:
工业机器人虚拟仿真技术(搬运工作站应用编程)-公开课-教案

xxxxxx 职业学院公开课
《工业机器人虚拟仿真技术》
----搬运工作站虚拟仿真教案系部: XXXXXXXXXX
教师: XXXXXX
2
3
1.播放机器人夹具抓取放置视频,通过观看视频让学生们明确工具抓取、放置的任务。
【观看视频】
1.
记录到活页教材中
4
1.搬运工艺路径规划流程设计。
【仿真演示】
1.演示整体夹具抓取放置的仿真动画。
布置活
动:学生组内进行讨论,头脑风暴制定夹具抓的
工作流程图,并将结果上传到学习通平台。
展
示并点评学生成果,总结电机外壳搬运抓放工作
流程。
【设计分享】
1.
求,
台,
计方案,并记录到活页任务单中。
2.机器人信号创建与连接;
3.搬运组件创建与属性配置。
【弹幕讨论】
1.
建的作用以及信号设置的类型。
【虚拟演示】
2.
号设置、搬运组件创建与属性配置的方法
设置要求所有参数最都不能出错,需要操作者严谨、认真的态度,引入精益求精的工匠精神。
【投屏演示】
5
3.利用投屏技术,使用示教器示范讲解夹具抓取放置的编程方法,重点讲解如何连接IO信号,机器人如何选取过渡点、设置路径等。
师讲解的编程要点,思考编写电机外壳搬运程序的方法,
7
8
(五)教学反思
9。
工业机器人技术 搬运的编程与操作

工业机器人技术项目九搬运综合的编程与操作任务二搬运的编程与操作导入如何实现FANUC 机器人搬运工件呢?目录学习目标知识准备任务实施主题讨论12学习目标知道FANUC 机器人搬运的位置参数知道FANUC 机器人位置寄存器的参数、格式知识目标3会使用位置寄存器编写机器人的搬运程序会使用位置寄存器编写机器人的搬运程序一、搬运路径1.搬运对象以下4个圆形薄片:一、搬运路径2.搬运路径针对这4个圆形薄片,我们需要做:将圆片从A处搬运至a处、B处搬运至b处、C处搬运至c处、D处搬运至d处。
详细的路径情况如下图所示:二、位置寄存器指令在搬运过程中,我们希望对机器人运动点位的数据变换更加方便,便于编程。
位置寄存器是记录有位置信息的寄存器,可以进行加减运算。
位置寄存器有2种形式:☐PR[i]☐PR[i,j]二、位置寄存器指令PR[i]可以应用赋值语句将当前位置信息赋值给PR[i]。
PR[3]=LPOS把当前位置信息复制到位置寄存器PR[3]中去。
二、位置寄存器指令知识准备PR[i,j]i :位置寄存器号j :数字对应方向该形式的位置寄存器指,将已经存储在PR[i]中的位置信息,在j 对应的方向上偏移。
PR[3,2]=PR[3,2]+342将存储在PR[3]中的位置信息在Y 轴(直角坐标系的情况下)的正方向上偏移342毫米。
数字123456直角坐标X Y Z W P R 关节坐标J1J2J3J4J5J61.搬运程序的编程与操作步骤一:首先,创建搬运圆片A程序,点击确定,进入BANYUN_A程序。
步骤二:添加用户坐标系指令;步骤三:使用户坐标系为0;1.搬运程序的编程与操作步骤四:添加工具坐标系指令;步骤五:让工具坐标系为3;步骤六:添加关节运动指令,记录机器人初始状态P1点;步骤七:添加关节运动指令,记录圆片A正上方位置P2点;1.搬运程序的编程与操作步骤八:添加直线运动指令,记录圆片吸取位置P3点,更改速度为500mm/s;步骤九:调用吸盘吸取子程序SUCK;步骤十:添加直线运动指令,将P[4]修改为P[2],速度100修改为500;1.搬运程序的编程与操作步骤十一:点击F1(指令)按键,在出现的指令框,选择位置寄存器指令,点击确定。
机器人现场编程-工件搬运示教编程
工件搬运示教编程
一、机器人工作情境
• 机器人从其右前方的A托盘7号工位抓取工件,将其搬运到机器人左侧 的B托盘7号工位,应用综合命令进行示教,并再现运行程序。
二、机器人运动过程
起始 位姿 位姿 调整
放置
工件 移动 工件
抓取 工件
二、机器人运动轨迹规划
三、示教
步 骤 1 2 3 4 5 6 7 8 9 10 示 教 点 P1 P2 P3 P4 P4 P3 P5 P6 P6 P5 命令要素和参数值 示教内容 机器人以各轴方式,速度 9、精度 4 运动到起始点,夹具打开 机器人以各轴方式,速度 9、精度 4 运动到 P2 点,保持夹具打开 机器人以直线方式,速度 7、精度 2 运动到 P3 点,保持夹具打开 机器人以直线方式,速度 5、精度 1 运动到 P4 点,等待一个计时时间 夹具闭合,等待 1 个计时时间 机器人以直线方式,速度 5、精度 1 回到 P3 点,保持夹具闭合 机器人以各轴方式,速度 9、精度 4 运动到 P5 点,保持夹具闭合 机器人以直线方式,速度 5、精度 1 运动到 P6 点,保持夹具闭合 等待 1 个计时时间,打开夹具 具打开 插补 各轴 各轴 各轴 直线 直线 直线 各轴 直线 直线 直线 速度 9 9 9 5 5 5 9 5 5 7 精度 4 4 4 1 1 1 4 1 1 4 计时 0 0 0 1 1 0 0 1 1 0 工具 1 1 1 1 1 1 1 1 1 1 1 1 1 1 夹紧
需替换!
四、检查程序
• 1)通过A+光标键,将光标移动到程序第1行;
• 2)按示教器握杆+检查前进键,执行第1行程序; • 3)移动光标至下一条,按示教器握杆+检查前进键,执行第2行程序, • 4)依次类推,检查所有程序行。
KUKA工业机器人搬运编程与操作(中)
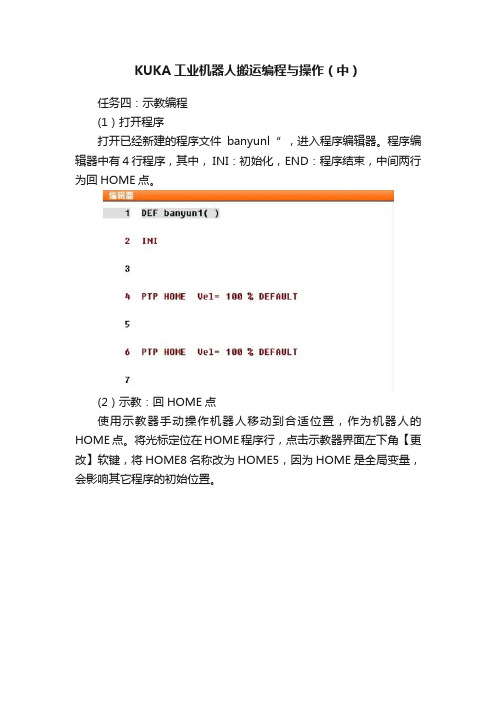
KUKA工业机器人搬运编程与操作(中)任务四:示教编程(1)打开程序打开已经新建的程序文件banyunl“ ,进入程序编辑器。
程序编辑器中有4行程序,其中, INI:初始化,END:程序结束,中间两行为回HOME点。
(2)示教:回HOME点使用示教器手动操作机器人移动到合适位置,作为机器人的HOME点。
将光标定位在HOME程序行,点击示教器界面左下角【更改】软键,将HOME8名称改为HOME5,因为HOME是全局变量,会影响其它程序的初始位置。
点击HOME5后黑色三角形设定工具坐标系和基坐标系点击示教器界面右下角【OK】软键,弹出对话框,点击【是】接纳坐标系修改,继续弹出对话框,点击【是】采用此点作为HOME5点,同时完成第4行PTP命令的修改。
同样地,将默认的第6行命令中HOME点(3)示教1/0:气爪打开将光标选择在第5行,点击示教界面左下角【指令】软键,相继选择【逻辑】→【OUT】→OUT指令,弹出OUT联机表格。
将输出端编号改为17,输出接通状态改为FALSE,取消CONT,完成OUT 命令参数设置,点击示教界面右下角【OK】软键。
同时,再次将光标选择在第5行,点击示教界面右下角【编辑】软键,选择【删除】将第5行空行删除。
(4 )示教:P1点手动操作机器人移动到Pl点,将光标移至第5行,点击示教界面左下角【指令】→【运动】→【PTP】,添加指令PTP示教界面右下角【OK】软键完成P1点示教(5 )示教:P2点手动操作机器人移动到P2 点,将光标移至第6行,点击示教界面下边【上一条指令】,继续点击添加指令PTP,点击示教界面右下角【OK】软键完成P2点示教(6 )示教:P3点手动操作机器人移动到P3 点,将光标移至第7行,点击示教界面下边上一条指令继续添加指令PTP,点击示教界面右下角【OK】软键完成P3点示教(7 )示教:P4点手动操作机器人移动到P4点,将光标移至第8行,点击示教界面下边【上条指令】,继续添加指令PTP,点击示教界面右下角【OK】软键完成P4点示教。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
• 4)按A+运转,解除机器人暂停状态(示教器HOLD灯亮),按A+马达开, 马达上电(MOTOR灯亮);
• 5)按A+循环启动,启动程序的再现运行。
七、 课程预告
• 工件搬运综合命令示教。
需替换!
四、检查程序
• 1)通过A+光标键,将光标移动到程序第1行;
• 2)按示教器握杆+检查前进键,执行第1行程序; • 3)移动光标至下一条,按示教器握杆+检查前进键,执行第2行程序, • 4)依次类推,检查所有程序行。
五、再现运行程序
• 1)将控制器示教开关打到REPEAT,示教器的示教锁开关打到ON,示教器 触摸屏显示机器人处于再现状态(图);
川崎工业机器人示教
工件搬运示教编程
一、机器人工作情境
• 机器人从其右前方的A托盘7号工位抓取工件,将其搬运到机器人左侧 的B托盘7号工位,应用综合命令进行示教,并再现运行程序。
二、机器人运动过程
起始 位姿 取 工件
二、机器人运动轨迹规划
三、示教
步 骤 1 2 3 4 5 6 7 8 9 10 示 教 点 P1 P2 P3 P4 P4 P3 P5 P6 P6 P5 命令要素和参数值 示教内容 机器人以各轴方式,速度 9、精度 4 运动到起始点,夹具打开 机器人以各轴方式,速度 9、精度 4 运动到 P2 点,保持夹具打开 机器人以直线方式,速度 7、精度 2 运动到 P3 点,保持夹具打开 机器人以直线方式,速度 5、精度 1 运动到 P4 点,等待一个计时时间 夹具闭合,等待 1 个计时时间 机器人以直线方式,速度 5、精度 1 回到 P3 点,保持夹具闭合 机器人以各轴方式,速度 9、精度 4 运动到 P5 点,保持夹具闭合 机器人以直线方式,速度 5、精度 1 运动到 P6 点,保持夹具闭合 等待 1 个计时时间,打开夹具 机器人以直线方式,速度 7、精度 4 回到 P5 点,保持夹具打开 插补 各轴 各轴 各轴 直线 直线 直线 各轴 直线 直线 直线 速度 9 9 9 5 5 5 9 5 5 7 精度 4 4 4 1 1 1 4 1 1 4 计时 0 0 0 1 1 0 0 1 1 0 工具 1 1 1 1 1 1 1 1 1 1 1 1 1 1 夹紧