伺服电机接线方式
伺服电机的接线方法

伺服电机的接线方法伺服电机的接线方法根据不同型号、不同应用场景会有一些差异,以下是一般伺服电机的接线方法。
首先需要明确几个概念:伺服电机通常由伺服控制器驱动,伺服控制器将控制信号发送给伺服电机,使其按照预定的速度和位置运动。
伺服电机由输入端子和输出端子组成,输入端子接收来自伺服控制器的控制信号,输出端子则是电机的电源和信号引出端口。
一般来说,伺服电机的输入端子包括以下几种信号:1. 电源信号:通常伺服电机需要接受直流电源供电,电源信号即为电机的电源输入端子。
一般来说,伺服电机的电压和电流需要根据电机的额定参数和工作要求进行选择,供电电压一般为直流24V,也有一些伺服电机需要直流48V或更高的电压。
在接线时需要注意供电的极性,通常红线接正极,黑线接负极。
2. 使能信号:使能信号用于开启或关闭伺服电机,一般为一个开关信号。
伺服电机在工作前需要被使能,以便能够接收控制信号并正常运行。
使能信号通常由伺服控制器发送,接线时需要连接控制器的相应信号端口。
3. 控制信号:控制信号是指伺服控制器输出的用于控制伺服电机运动的信号,一般有脉冲信号、方向信号、速度信号等。
脉冲信号用于控制电机的旋转步进,当脉冲信号到达电机时,电机会按照设定的步进角度转动一定角度。
方向信号用于指示电机的旋转方向,一般为一个二进制信号,高电平表示正转,低电平表示反转。
速度信号用于控制电机的转速,通过改变速度信号的频率或脉冲宽度可以调整电机的转速。
控制信号的接线一般需要参考伺服控制器和伺服电机的接口定义。
4. 反馈信号:反馈信号是指电机输出的用于反馈电机运动状态的信号,一般有编码器信号、霍尔效应信号、位置传感器信号等。
反馈信号可以用于校正电机的运动位置和速度,使其更加精确。
反馈信号的接线也需要参考伺服电机的具体型号和接口定义。
除了输入端子外,伺服电机的输出端子通常包括以下几种信号:1. 电源输出:有些伺服电机还具有电源输出功能,可以将电源信号输出给其他设备作为供电。
伺服电机接线
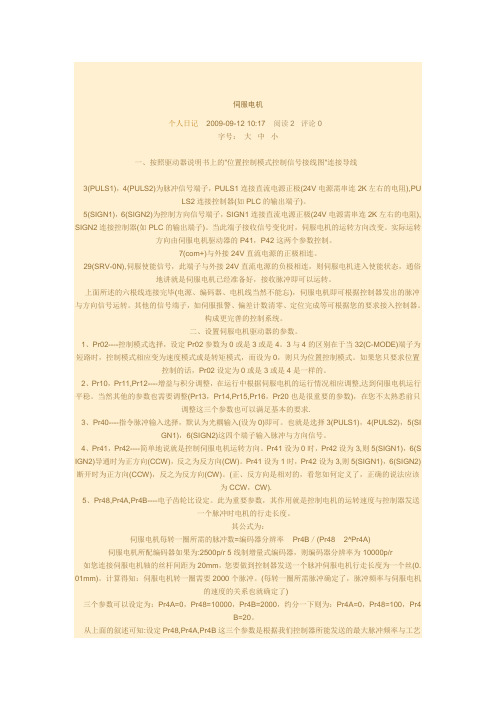
伺服电机个人日记 2009-09-12 10:17 阅读2 评论0字号:大中小一、按照驱动器说明书上的"位置控制模式控制信号接线图"连接导线3(PULS1),4(PULS2)为脉冲信号端子,PULS1连接直流电源正极(24V电源需串连2K左右的电阻),PULS2连接控制器(如PLC的输出端子)。
5(SIGN1),6(SIGN2)为控制方向信号端子,SIGN1连接直流电源正极(24V电源需串连2K左右的电阻), SIGN2连接控制器(如PLC的输出端子)。
当此端子接收信号变化时,伺服电机的运转方向改变。
实际运转方向由伺服电机驱动器的P41,P42这两个参数控制。
7(com+)与外接24V直流电源的正极相连。
29(SRV-0N),伺服使能信号,此端子与外接24V直流电源的负极相连,则伺服电机进入使能状态,通俗地讲就是伺服电机已经准备好,接收脉冲即可以运转。
上面所述的六根线连接完毕(电源、编码器、电机线当然不能忘),伺服电机即可根据控制器发出的脉冲与方向信号运转。
其他的信号端子,如伺服报警、偏差计数清零、定位完成等可根据您的要求接入控制器。
构成更完善的控制系统。
二、设置伺服电机驱动器的参数。
1、Pr02----控制模式选择,设定Pr02参数为0或是3或是4。
3与4的区别在于当32(C-MODE)端子为短路时,控制模式相应变为速度模式或是转矩模式,而设为0,则只为位置控制模式。
如果您只要求位置控制的话,Pr02设定为0或是3或是4是一样的。
2、Pr10,Pr11,Pr12----增益与积分调整,在运行中根据伺服电机的运行情况相应调整,达到伺服电机运行平稳。
当然其他的参数也需要调整(Pr13,Pr14,Pr15,Pr16,Pr20也是很重要的参数),在您不太熟悉前只调整这三个参数也可以满足基本的要求.3、Pr40----指令脉冲输入选择,默认为光耦输入(设为0)即可。
也就是选择3(PULS1),4(PULS2),5(SIGN1),6(SIGN2)这四个端子输入脉冲与方向信号。
伺服电机接线方法

伺服电机接线方法伺服电机作为现代工业自动化领域中常用的一种电机类型,其接线方法对于设备的正常运行起着至关重要的作用。
正确的接线方法不仅可以确保设备稳定运行,还能最大限度地发挥伺服电机的性能。
本文将介绍伺服电机的接线方法,包括基本的接线步骤、常见接线错误以及接线注意事项。
1. 基本接线步骤接线之前,首先需要确认伺服电机所需的电压和电流参数,并准备好相应的电缆和接线端子。
接下来按照以下步骤进行接线:1.接地线连接:将伺服电机的接地线连接到设备的接地端子上,确保设备接地可靠。
2.电源线连接:根据伺服电机的电源需求,将电源线连接到对应的电源端子上,注意极性的正确连接。
3.控制信号线连接:将控制信号线根据接口要求连接到控制设备的对应端子上,确保连接稳固。
4.信号线连接:根据实际需要连接信号线,例如编码器信号线等,确保连接正确。
5.检查:接线完成后,仔细检查各个接线是否牢固、正确,确认无误后可以通电测试。
2. 常见接线错误在接线过程中,常见的接线错误可能会导致设备无法正常工作或甚至损坏设备。
以下是一些常见的接线错误:•极性接反:将电源线极性连接错误,导致电机无法正常工作。
•接地不良:接地线连接不牢固或接地线断开,导致设备无法正常工作或产生安全隐患。
•接线端子松动:接线端子未连接牢固,可能在设备运行时发生松动,影响设备稳定性。
3. 接线注意事项在接线过程中,需要注意一些事项,以确保设备接线正确、安全,正常运行:•遵循设备规范:接线前请阅读设备的接线手册或规范,按照要求进行接线。
•断电操作:在接线之前,请务必确保设备已经断电,并在接线完成后再通电测试。
•接线绝缘:在接线过程中,请注意绝缘处理,避免短路或触电危险。
•定期检查:接线完成后,建议定期检查设备的接线情况,确保接线良好。
通过正确的接线方法,伺服电机可以发挥其最佳性能,确保设备正常运行。
在接线过程中,一定要细心、耐心,避免常见的接线错误,同时注意接线安全,保障设备的稳定运行。
伺服驱动器接线原理图
P,S
报警清除输入端子
ALRS ON:清除系统报警
ALRS OFF:保持系统报警
CN2-23
偏差计数器清零
CLE
Type1
P
位置偏差计数器清零输入端子
CLE ON:位置控制时,位置偏差计数器清零
CN2-12
模拟量输入端
Vin
Type4
S
外部模拟速度指令输入端子,单端方式,输入阻抗10千欧姆,输入围-10V~+10V。SON来自Type1P,S
伺服使能输入端子
SON ON:允许驱动器工作
SON OFF:驱动器关闭,停止工作
电机处于自由状态
注1:当从SON OFF打到SON ON前,电机必须是静止的
注2:打到SON ON后,至少等待5ms再输入命令
注3:如果用PA27打开部使能,则SON信号不检测。
CN2-9
报警消除
ALRS
电缆长度较长时,应使用多根芯线并联,减小线路压降。
CN1-1
CN1-2
CN1-3
CN1-4
CN1-16
电源公共地
0V
CN1-24
编码器A+输入
A+
Type4
与伺服电机光电编码器A+相连接
CN1-12
编码器A-输入
A-
与伺服电机光电编码器A-相连接
CN1-23
编码器B+输入
B+
Type4
与伺服电机光电编码器B+相连接
CN2-11
编码器B-输入
B-
与伺服电机光电编码器B-相连接
CN2-22
编码器Z+输入
Z+
Type4
与伺服电机光电编码器Z+相连接
CN2-10
伺服电机c500型说明书(1)
C500 型工业快速门控制系统使用说明书一,主回路配线1、控制端子接线:2、单相220V动力端子配线220V电源通过断路器到电路板上的L N,PE--接地线,P+/PB--电阻线,U /V /W--电机线,B1 B2输出220V,经过整流块接入刹车。
3.电机接线图:三、限位调试及参数设置相关要求:1)限位学习过程:长按1号键(LEARN)5秒,显示L0,再按2号键(ENTER),进入门帘上限位学习同时LED屏上显示当前门帘所在位置编码器反馈的数值,然后长按3号键(UP)来调整门的上限位(注:门是往上走),调整完成后按2号键(ENTER)确认保存上限位位置,同时显示屏显示L1进入下限位学习,按2号键(ENTER)显示编码器反馈的数值,然后按4号键(DOWN)调整门的下限位,调整完成后按2号键(ENTER)确认保存下限位位置同时显示L1,限位学习结束,按1号键(LEARN)直接返回运行状态显示0。
2),参数设置:参数号参数名称范围默认值说明P1—00 门类选择0-1 0 0 -快速门;1-滑升门P1—01 正转频率0—100.00 50.00P1---02 反转频率0— 100.00 30.00P1---03 上缓冲距离50---9999 1000P1—04 加速时间1---100 30P1---05 减速时间1---100 4P1—06 下降延时0—200 10P1—07 输出功能选择0---4 0 LockOut输出端口功能选择0:互锁输出;1:关到位;3)在监控画面下,按DOWN键6秒以上,LED显示00000,输入正确密码,进入P0参数组;P0—00 修改密码P0—01 允许运行时间设置(天)P0---02 查看总运行时间(小时)P0—03 查看运行次数P0—04 查看运行次数次数=P0.04x10000+ P0.034)手自动变换方式由P0-08决定。
P0-08为0时,在监控画面下,同时按ENTER和DOWN 键,实现手动、自动切换;P0-08为1时,手自动端闭合时为手动,断开是为自动。
伺服电机接线方式
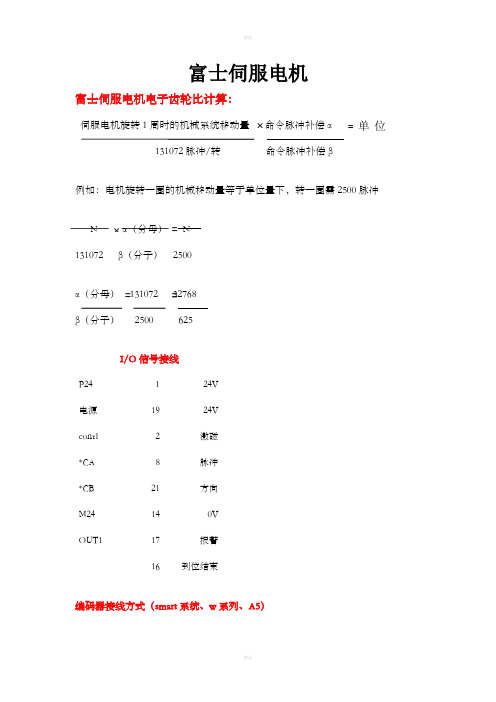
富士伺服电机富士伺服电机电子齿轮比计算:伺服电机旋转1周时的机械系统移动量 命令脉冲补偿α131072脉冲/转 命令脉冲补偿β例如:电机旋转一圈的机械移动量等于单位量下,转一圈需2500脉冲N α(分母) N131072 β(分子) 2500α(分母) 131072 32768 β(分子) 2500 625I/O 信号接线P241 24V 电源19 24V cont12 激磁 *CA8 脉冲 *CB21 方向 M2414 0V OUT1 17报警16 到位结束编码器接线方式(smart 系统、w 系列、A5) × =单位× = = =驱动器电机端P517P5M528M5SIG+55SIG+SIG-64SIG-BAT+31BAT+BAT-42BAT-GND外壳3地线旧版富士驱动器参数设置新版富士驱动器参数设置1# 16384(分子)1# 02# 125(分母)3# 0(脉冲+方向控制模式)3# 0(脉冲+方向控制模式)4# 1(方向)4# 1(方向)6# 65536(分子)7# 15(刚性)7# 125(分母)19# 250 8#15# 14(刚性)松下伺服电机松下A5 I/O接线说明:1、2、7 24V36、41 0V4 脉冲6 方向29 使能ON37 报警松下A5编码器接线说明:驱动器马达14255 26 3外壳6(GND)松下A5驱动器参数设置Pr0.** 0# 方向1# 控制模式07#指令脉冲形式38#电机旋转一圈指令脉冲数台达伺服电机台达电子齿轮比计算公式:马达转一圈脉冲数(F)=1.280.000÷分子(N)/分母(M)台达编码器接线说明:驱动器接头端马达端5 14 414、16 713、16 8屏蔽线9台达伺服电机I/O控制说明:9 使能ON28 报警30 停止37 方向41 脉冲35、1 24V27、4、45、49 0V5 定位结束台达驱动器参数设定:P1-00 2(脉冲+方向)P1-44 分子(1280000)P1-45 分母(1000)P2-31 刚性P2-32 增益调整方向P2-19 105P1-54 256(如马达转一圈1000脉冲设为256,表示偏差10个脉冲)。
伺服电机基础接线操作示意

伺服电机基础接线操作示意
在工业控制领域中,伺服电机是一种控制精度高、响应速度快的电动执行器,被广泛应用于自动化设备中。
伺服电机的接线操作对于整个设备的正常运行至关重要。
下面将介绍伺服电机的基础接线操作示意。
1. 准备工作
在进行伺服电机接线操作前,首先需要明确每个电缆的颜色及其对应的功能。
通常伺服电机的电缆包含编码器反馈线、电源线、控制器通讯线等。
2. 接线步骤
步骤一:电源线接线
将伺服电机的电源线连接到电源输入端子。
确保电源的极性正确,否则会影响电机的正常工作。
步骤二:编码器反馈线接线
将伺服电机的编码器反馈线连接到相应的编码器接口。
编码器反馈线的连接有助于控制系统实时监测电机位置和速度。
步骤三:控制器通讯线接线
根据控制器的要求,将伺服电机的通讯线接入到控制器的通讯接口。
通讯线的连接能够让控制系统实现对电机的精准控制。
步骤四:接地线接线
为了确保设备安全,伺服电机的接地线也需要正确连接到设备的接地端子上。
步骤五:接线固定
在接线结束后,务必检查每根电缆的连接是否牢固,并使用绝缘胶带或绑带将电缆固定在适当位置,防止碰撞或拉扯导致断线。
3. 调试验证
接线完成后,需进行合适的调试和验证工作。
可通过控制系统操作电机,观察其运动是否正常,以确保接线没有问题。
通过以上步骤,我们可以完成伺服电机的基础接线操作示意。
正确的接线操作不仅可以确保设备的正常运行,还能提高设备的稳定性和可靠性。
希望以上内容能对您有所帮助。
伺服电机的原理图及接线方法
伺服电机的原理图及接线方法一、伺服电机的工作原理伺服电机是一种能够精确控制位置、速度和加速度的电动机,通常由电机、编码器、控制器和驱动器组成。
其工作原理是通过控制器不断监测编码器反馈的位置信息,然后与设定值进行对比,从而调整电机的输出来使得实际位置与设定位置相匹配。
二、伺服电机的原理图伺服电机的原理图主要包括电机、编码器、控制器和驱动器四个部分的连接。
其中,电机和编码器通过接线板连接,接线板通过信号线与控制器连接,控制器再通过信号线与驱动器相连。
2.1 电机连接电机通常有三个电源线,分别对应A、B、C相。
A相与编码器的A相连接,B相与编码器的B相连接,C相接地。
2.2 编码器连接编码器是用来反馈电机实际位置的装置,其A、B两相分别与控制器的A、B相连接,Z相连接控制器的Z相。
2.3 控制器连接控制器是伺服电机的“大脑”,接收编码器反馈的信号,并通过PID控制算法计算出控制电机转速的信号。
通常控制器有供电、地线,编码器A、B、Z相,驱动器A、B、C相等多条接线。
2.4 驱动器连接驱动器是将控制器输出的信号转化为电机可接受的电流信号,通过调节电流来控制电机的运动。
驱动器通常有三个相线与电机相对接,还有控制信号线与控制器连接。
三、伺服电机的接线方法1.首先,确定每个部分的接线方式,根据原理图正确连接电机、编码器、控制器和驱动器之间的信号线。
2.确保接线板的接口清晰,无损坏,连接稳固。
3.接线完成后,检查每个部分的接口是否牢固,信号线是否接错。
4.打开控制器电源,按照调试程序进行测试,观察电机的运动是否符合设定值。
四、总结伺服电机通过精确的控制算法实现了高精度的位置控制,其原理图及接线方法是确保电机正常运行的关键环节。
正确理解和掌握伺服电机的工作原理,能够帮助工程师更好地设计和维护伺服系统。
伺服电机驱动器sa3l04c实验接线
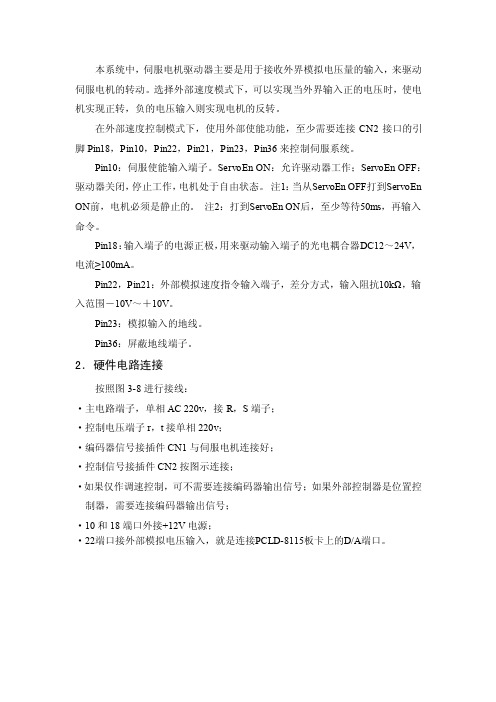
本系统中,伺服电机驱动器主要是用于接收外界模拟电压量的输入,来驱动伺服电机的转动。
选择外部速度模式下,可以实现当外界输入正的电压时,使电机实现正转,负的电压输入则实现电机的反转。
在外部速度控制模式下,使用外部使能功能,至少需要连接CN2接口的引脚Pin18,Pin10,Pin22,Pin21,Pin23,Pin36来控制伺服系统。
Pin10:伺服使能输入端子。
ServoEn ON:允许驱动器工作;ServoEn OFF:驱动器关闭,停止工作,电机处于自由状态。
注1:当从ServoEn OFF打到ServoEn ON前,电机必须是静止的。
注2:打到ServoEn ON后,至少等待50ms,再输入命令。
Pin18:输入端子的电源正极,用来驱动输入端子的光电耦合器DC12~24V,电流≥100mA。
Pin22,Pin21:外部模拟速度指令输入端子,差分方式,输入阻抗10kΩ,输入范围-10V~+10V。
Pin23:模拟输入的地线。
Pin36:屏蔽地线端子。
2.硬件电路连接按照图3-8进行接线:·主电路端子,单相AC 220v,接R,S端子;·控制电压端子r,t接单相220v;·编码器信号接插件CN1与伺服电机连接好;·控制信号接插件CN2按图示连接;·如果仅作调速控制,可不需要连接编码器输出信号;如果外部控制器是位置控制器,需要连接编码器输出信号;·10和18端口外接+12V电源;·22端口接外部模拟电压输入,就是连接PCLD-8115板卡上的D/A端口。
3. 驱动器操作流程驱动器操作流程,见图3-9。
培养幼儿良好生活习惯的研究开题报告一、问题的提出(一)课题研究的背景和意义幼儿期是人的一生身心发展尤其大脑结构和机能发展最为旺盛的时期,更是良好生活习惯形成的关键期。
《幼儿园教育指导纲要》在健康领域中明确提出:幼儿要养成良好的生活、卫生习惯,有基本的生活自理能力。
伺服电机接线

伺服电机接线介绍伺服电机是一种常用的电动机,具有精确位置控制和速度调节的能力。
为了正确使用伺服电机,需要进行正确的接线。
本文将介绍伺服电机的常见接线方法。
设备和材料在进行伺服电机接线之前,需要准备以下设备和材料: 1. 伺服电机 2. 控制器 3. 电源 4. 连接线和插头步骤下面是进行伺服电机接线的步骤:1. 确定电源类型在进行伺服电机接线之前,首先需要确定所使用的电源类型。
常见的电源类型有交流电源和直流电源。
根据电源类型的不同,选用不同的接线方法。
2. 了解伺服电机接线规范在接线之前,需要详细了解所使用的伺服电机的接线规范。
通常,伺服电机的接线规范会包括电源接线、控制信号接线和地线接线等。
- 电源接线:包括电源正、负极的接线方式,以及电源是否需要接地线。
- 控制信号接线:通常包括位置反馈信号、速度指令信号、使能信号等控制信号的接线方式。
- 地线接线:用于提供电流回路的接线方式。
3. 进行电源接线根据伺服电机的接线规范,将电源正极和负极正确地连接到伺服电机的电源接线端子上。
如果需要接地线,将接地线连接到接地端子上。
4. 进行控制信号接线根据伺服电机的接线规范,将位置反馈信号、速度指令信号和使能信号等控制信号正确地连接到伺服电机的信号接线端子上。
确保信号线的连接顺序正确,并且无松动。
5. 进行地线接线根据伺服电机的接线规范,将地线正确地连接到伺服电机的地线接线端子上。
确保地线连接牢固,并且与地面接触良好。
6. 检查接线完成接线后,仔细检查所有接线点是否正确连接,并且没有松动情况。
确保接线没有错误和短路现象。
注意事项在进行伺服电机接线过程中,需要注意以下事项: 1. 严格按照伺服电机的接线规范进行接线,避免接线错误导致设备损坏或不正常工作。
2. 在接线过程中,确保电源已经关闭,以避免触电和其他安全问题。
3. 如果不确定接线方法或遇到困难,应该参考伺服电机的产品手册或咨询相关专业人士。
结论正确进行伺服电机的接线可确保其正常工作和安全运行。
伺服电机没有标注uvw接线颜色怎么接驱动器?
如果伺服电机没有标注UVW 接线颜色,你可以通过以下步骤来确定正确的接线方式:
1. 确定电机类型:首先要确认电机的类型,包括步进电机、直流无刷电机等,以确定其相位和接线方式。
2. 使用万用表进行测试:将万用表设置为测量电阻的模式,然后测试电机的每对导线之间的电阻值。
如果电机是三相电机,你应该能够看到三对导线之间的较低电阻值。
3. 确定绕组连接:根据测量的电阻值来确定电机的绕组连接,通常来说,一个导线会连接到一个绕组,因此可以将导线分为三组,并确定每组的连接方式。
4. 接线到驱动器:根据确定的绕组连接方式,将电机的导线接线到驱动器的U、V、W 三个相位端口上,确保正确地匹配各相的连接。
5. 注意安全:在进行接线操作时,务必确认电源已断开,并按照正确的程序进行接线,以避免短路或其他危险情况发生。
如果以上步骤未能解决问题,建议寻求专业人士的帮助,避
免出现错误接线导致电机或驱动器损坏的情况。
伺服驱动器接线原理图说课讲解
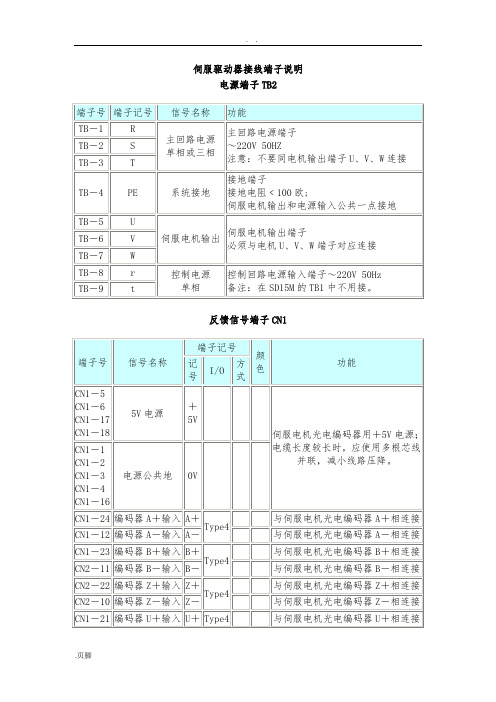
必须与电机U、V、W端子对应连接
TB-6
V
TB-7
W
TB-8
r
控制电源
单相
控制回路电源输入端子~220V 50Hz
备注:在SD15M的TB1中不用接。
TB-9
t
反馈信号端子CN1
端子号
信号名称
端子记号
颜色
功能
记号
I/O
方式
CN1-5
CN1-6
CN1-17
CN1-18
5V电源
+5V
伺服电机光电编码器用+5V电源;
P,S
CN2-24
编码器Z相信号
ZOUT+
Type5
P,S
CN2-11
ZOUT-
P,S
CN2-2
编码器Z相集电极开路输出
CZ
Type6
P,S
1.编码器Z相信号由集电极开路输出,编码器Z相信号出现时,输出ON(输出导通),否则输出OFF(输出截止);
2.非隔离输出(非绝缘);
3.在上位机,通常Z相信号脉冲很窄,故请用高速光电耦合器
伺服报警输出端子。可以用PA27参数来改变报警输出电平高或低有效。
CN2-14
定位完成输出
COIN
Type2
P
定位完成输出端子
COIN ON:当位置偏差计数器数值在设定的定位范围时,定位完成输出ON
CN2-4
超程保护
RSTP
Type1
P,S
外接超程保护信号,信号有效时产生Err—32报警
CN2-3
输出端子
ALRS
Type1
P,S
报警清
ALRS OFF:保持系统报警
伺服电机接线教程

伺服电机接线教程伺服电机是一种常用的电机控制设备,能够准确地控制电机的位置和速度。
正确地接线是伺服电机正常工作的关键,下面将为您介绍伺服电机的接线方法及步骤。
首先,我们需要明确伺服电机的接线端口。
一般来说,伺服电机有三个主要的接线端口:电源端口、控制信号端口和地线端口。
接下来,我们依次介绍每个接线端口的具体接线方法。
首先是电源端口。
伺服电机需要外部电源供电,所以我们需要将电源的正负极分别连接到伺服电机的正负电源端口。
一般情况下,电源电压应与伺服电机标签上标注的电源要求匹配,以确保电机的正常工作。
接着是控制信号端口。
伺服电机的控制信号通常由控制器(如PLC)提供。
控制信号端口通常分为三个引脚,分别是信号输入、信号地线和信号电源。
首先,我们需要将信号输入引脚连接到控制器的输出引脚,以接收控制器发送的控制信号。
同时,我们还需要将信号地线引脚连接到控制器的地线引脚,以确保信号的稳定传输。
最后,我们需要将信号电源引脚连接到控制器的电源引脚上,以为控制信号提供所需的电源。
同样,控制信号电压也应与伺服电机标签上标注的要求相匹配。
最后是地线端口。
地线端口用于连接伺服电机的地线,以实现电气接地。
通常,我们只需要将地线连接到电源或控制器的地线引脚上即可。
在进行接线之前,我们还需要注意以下几点:首先,确保电路处于断电状态下,以免发生触电事故。
其次,仔细查看伺服电机的接线图,确保正确地连接各个引脚。
最后,使用适当的电线规格进行接线,以确保电流的正常传输。
同时,需要注意接线处的接触良好,电线连接牢固,以免发生接触不良或接线松动等问题。
总结起来,伺服电机的正确接线方法主要包括电源端口、控制信号端口和地线端口的接线。
正确的接线能够确保伺服电机的正常工作,并提高电机控制的精度和稳定性。
在进行接线时,我们需要注意安全、仔细查看接线图并使用适当的电线规格。
只有正确地接线,我们才能充分发挥伺服电机的功能。
伺服驱动器接线原理图

编码器A-输入
A-
与伺服电机光电编码器A-相连接
CN1-23
编码器B+输入
B+
Type4
与伺服电机光电编码器B+相连接
CN2-11
编码器B-输入
B-
与伺服电机光电编码器B-相连接
CN2-22
编码器Z+输入
Z+
Type4
与伺服电机光电编码器Z+相连接
CN2-10
编码器Z-输入
Z-
与伺服电机光电编码器Z-相连接
CN2-12
模拟量输入端
Vin
Type4
S
外部模拟速度指令输入端子,单端方式,输入阻抗10千欧姆,输入范围-10V~+10V。
CN2-13
模拟量输入地
Vingnd
模拟输入的地线。
CN2-1
伺服准备好输出
SRDY
Type2
P,S
伺服准备好输出端子
SRDY ON:控制电源和主电源正常,驱动器没有报警,伺服准备好输出ON
CN2-20
指令脉冲禁止
INH
Type1
P
位置指令脉冲禁止输入端子
INH ON:指令脉冲输入禁止
INH OFF:指令脉冲输入有效
CN2-21
伺服使能
SON
Type1
P,S
伺服使能输入端子
SON ON:允许驱动器工作
SON OFF:驱动器关闭,停止工作
电机处于自由状态
注1:当从SON OFF打到SON ON前,电机必须是静止的
CN1-21
编码器U+输入
U+
Type4
与伺服电机光电编码器U+相连接
CN1-9
编码器U-输入
伺服电机三相接法

伺服电机三相接法1.引言1.1 概述概述部分的内容可以如下所示:引言部分将介绍本文的内容和目的。
本文将详细讨论伺服电机的三相接法,旨在帮助读者深入了解该接法的原理和应用。
伺服电机作为一种常用的运动控制元件,其性能对于机械系统的稳定性、定位精度和运动效果具有重要影响。
而三相接法作为伺服电机常见的接线方式之一,其在实际应用中具有广泛的应用场景。
本文将首先介绍伺服电机的基本概念和工作原理,包括其组成结构和工作原理。
随后,重点讨论了三相接法的原理和特点。
三相接法是指将伺服电机的三相绕组依次接至电源,这种接法常用于较大功率的伺服电机系统中。
我们将分析三相接法在电机的运转过程中所起到的作用,并详细说明其特点和优势。
文章主要将从理论和应用两个方面进行阐述。
通过对理论部分的介绍,读者将对伺服电机和三相接法有一个较为全面和系统的了解。
而在应用部分,我们将通过实际案例和实验结果来验证三相接法在实际工程中的可行性和优势。
通过这种方式,读者可以更好地理解并掌握三相接法的原理和应用。
本文的目的在于提供一个全面的介绍和讨论伺服电机的三相接法,以帮助读者更好地理解和应用该接法。
通过阅读本文,读者将能够了解伺服电机的基本原理,了解三相接法的特点与优势,并能够将其应用于实际工程中。
最终,我们希望本文能够为读者提供一些有价值的参考,使其在伺服电机的应用和设计中更加得心应手。
文章结构部分主要是介绍文章的整体结构和各个部分的内容安排。
在本篇长文中,文章结构可按如下方式安排:1. 引言- 1.1 概述- 1.2 文章结构- 1.3 目的2. 正文- 2.1 伺服电机介绍- 2.2 三相接法的原理3. 结论- 3.1 总结- 3.2 对未来发展的展望在引言部分,我们首先概述了本篇长文的主题——伺服电机三相接法。
接着,详细介绍了文章结构,也就是本节所在的部分。
最后,说明了本篇长文的目的,即为读者提供关于伺服电机三相接法的全面了解。
在正文部分,我们将首先介绍伺服电机的基本概念和特点,包括其工作原理、应用领域等内容。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
.
富士伺服电机
富士伺服电机电子齿轮比计算:命令
脉冲补偿周时的机械系统移动伺服电机旋转×位
β脉冲/转命令脉冲补偿131072
例如:电机旋转一圈的机械移动量等于单位量下,转一圈需2500脉冲
N α(分母) N
= ×131072 β(分子) 2500
α(分母) 131072 32768
= = 2500 625
β(分子)
I/O信号接线
P24 1 24V
24V 19 电源
激磁 2 cont1
脉冲8 *CA
方向21 *CB
0V M24 14
报警17 OUT1
到位结束16
编码器接线方式(smart系统、w系列、A5)
驱动器电机端 P5 P5 1 7
M5 2 M5 8
SIG+ 5 5 SIG+
SIG- 4 SIG- 6
BAT+ BAT+ 1 3
BAT- 2 BAT- 4
地线 GND
外壳 3
旧版富士驱动器参数设置新版富士驱动器参数设置
1# 16384(分子) 1# 0
2# 125(分母) 3# 0(脉冲+方向控制模式)3# 0(脉冲+方向控制模式) 4# 1(方向)
4# 1(方向) 6# 65536(分子)
7# 15(刚性) 7# 125(分母)
19# 250 8#
15# 14(刚性)
'.
.
松下伺服电机
松下A5 I/O接线说明:
1、2、7 24V
36、41 0V
4 脉冲
6 方向
29 使能ON
37 报警
松下A5编码器接线说明:
驱动器马达
14
25
5 2
6 3
外壳 6(GND)
松下A5驱动器参数设置Pr0.**
0# 方向
1# 控制模式 0
7#指令脉冲形式 3
8#电机旋转一圈指令脉冲数
'.
.
台达伺服电机
台达电子齿轮比计算公式:
马达转一圈脉冲数(F)=1.280.000÷分子(N)/分母(M)
台达编码器接线说明:
驱动器接头端马达端
5 1
4 4
14、16 7
13、16 8
屏蔽线 9
台达伺服电机I/O控制说明:
9 使能ON
28 报警
30 停止
37 方向
41 脉冲
35、1 24V
27、4、45、49 0V
5 定位结束
台达驱动器参数设定:
P1-00 2(脉冲+方向)
P1-44 分子(1280000)
P1-45 分母(1000)
P2-31 刚性
P2-32 增益调整方向
P2-19 105
P1-54 256()个脉冲2561000如马达转一圈脉冲设为,表示偏差10'.。