单伺服电机位置控制接线图
伺服电机接线
伺服电机个人日记 2009-09-12 10:17 阅读2 评论0字号:大中小一、按照驱动器说明书上的"位置控制模式控制信号接线图"连接导线3(PULS1),4(PULS2)为脉冲信号端子,PULS1连接直流电源正极(24V电源需串连2K左右的电阻),PULS2连接控制器(如PLC的输出端子)。
5(SIGN1),6(SIGN2)为控制方向信号端子,SIGN1连接直流电源正极(24V电源需串连2K左右的电阻), SIGN2连接控制器(如PLC的输出端子)。
当此端子接收信号变化时,伺服电机的运转方向改变。
实际运转方向由伺服电机驱动器的P41,P42这两个参数控制。
7(com+)与外接24V直流电源的正极相连。
29(SRV-0N),伺服使能信号,此端子与外接24V直流电源的负极相连,则伺服电机进入使能状态,通俗地讲就是伺服电机已经准备好,接收脉冲即可以运转。
上面所述的六根线连接完毕(电源、编码器、电机线当然不能忘),伺服电机即可根据控制器发出的脉冲与方向信号运转。
其他的信号端子,如伺服报警、偏差计数清零、定位完成等可根据您的要求接入控制器。
构成更完善的控制系统。
二、设置伺服电机驱动器的参数。
1、Pr02----控制模式选择,设定Pr02参数为0或是3或是4。
3与4的区别在于当32(C-MODE)端子为短路时,控制模式相应变为速度模式或是转矩模式,而设为0,则只为位置控制模式。
如果您只要求位置控制的话,Pr02设定为0或是3或是4是一样的。
2、Pr10,Pr11,Pr12----增益与积分调整,在运行中根据伺服电机的运行情况相应调整,达到伺服电机运行平稳。
当然其他的参数也需要调整(Pr13,Pr14,Pr15,Pr16,Pr20也是很重要的参数),在您不太熟悉前只调整这三个参数也可以满足基本的要求.3、Pr40----指令脉冲输入选择,默认为光耦输入(设为0)即可。
也就是选择3(PULS1),4(PULS2),5(SIGN1),6(SIGN2)这四个端子输入脉冲与方向信号。
伺服驱动器外部接线及详细说明
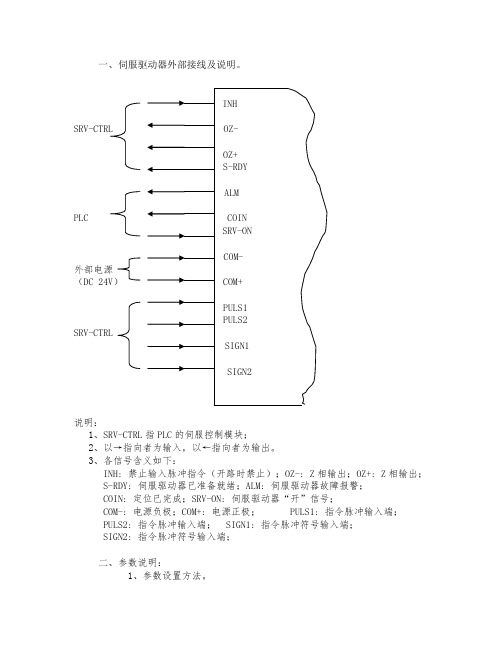
一、伺服驱动器外部接线及说明。
SRV-CTRLPLC外部电源(DC 24V)SRV-CTRL说明:1、SRV-CTRL指PLC的伺服控制模块;2、以→指向者为输入,以←指向者为输出。
3、各信号含义如下:INH: 禁止输入脉冲指令(开路时禁止);OZ-: Z相输出;OZ+: Z相输出;S-RDY: 伺服驱动器已准备就绪;ALM: 伺服驱动器故障报警;COIN: 定位已完成;SRV-ON: 伺服驱动器“开”信号;COM-: 电源负极;COM+: 电源正极; PULS1: 指令脉冲输入端;PULS2: 指令脉冲输入端; SIGN1: 指令脉冲符号输入端;SIGN2: 指令脉冲符号输入端;二、参数说明:1、参数设置方法。
操作面板上共有5个按键,意义如下:MODE:模式转换键,按此键可在4个模式间切换,这4个模式是:DP-××××: 选择监视项目(共有7个, 在按 MODE键显示DP-××××后先按SET,再按↑或↓选择)⑴、DP-EPS: 位置偏差;⑵、DP-SPD: 转速;⑶、DP-TRQ: 转矩;⑷、DP-CNT: 控制方式;⑸、DP-IO: 输入输出信号状态;⑹、DP-ERR: 错误信息;⑺、DP_NO: PR-××××: 设定参数。
EE-××××: 写入参数。
AT-××××: 自动增益调整。
SET:为设定及确认键。
↑:数值增加或移动到下一个选项;↓:数值减少或移动到上一个选项;←:数位间移动;具体设置步骤详见有关Driver的补充信息说明:1、参数号码后加“#“者为需要更改的,如02号参数实际应用中应设为0;2、控制方式含义T:转矩控制S:速度控制P:位置控制3、出厂设定为”*”者为出厂时未设置,需根据实际自行设置;4、其余参数可使用出厂设置;5、最后一栏为新Driver与之对应的参数(有些没有);6、更详细的说明参见Driver手册(旧)或参考Driver手册(新)中对应的参数;7、以下表格为Driver实际参数设置表。
基于LabVIEW的伺服电机测控系统设计

第1期(总第224期) 2021年2月机 械工程与自动化MECHANICAL ENGINEERING&AUTOMATIONNo1Feb文章编号=1672-6413(2021)01-0158-03基于LabVIEW的伺服电机测控系统设计櫜张日红,朱立学,杨松夏(仲恺农业工程学院机电工程学院,广东广州510225)摘要:伺服运动控制以其精准稳定的定位控制优势在工业机器人、机床自动化等方面得到了广泛应用。
在LabVIEW图形化编程开发环境下,通过调用研华PCI1245运动控制卡中的运动控制函数对4台交流伺服台达电机进行了单独运行和联动运行的定位控制程序开发,该程序还可以实时动态地监控伺服电机的状态参数。
通过在实验室环境下的调试运行,验证了控制程序的有效性。
关键词:伺服电机;LabVIEW;测控系统中图分类号:TP273文献标识码:A0引言由于伺服电机的精度高、高速性能好、适应性强以及运行稳定等优点,因而得到众多科研人员的青睐。
在机械运动控制研究领域中,伺服驱动控制是一个非常重要的研究课题,也是一个非常综合性的研究课题,其普遍应用于自动化CNC数控设备、自动化仪表车床、纺织业以及生产加工与制造进程控制系统中,它关系到机械电子工程、自动化控制以及计算机技术等学科[3。
与此同时,随着电子计算机应用技术的高速发展,使得虚拟仪器也逐渐得到学术界和工业界的认同及推广。
伴随着运动控制卡等一系列硬件的开发,在众多领域的研究、制造和开发中,LabVIEW虚拟仪器测控程序得到了非常广泛的应用,通过LabVIEW编程语言调用运动控制卡的内置函数对系统进行高精度的控制是全新的控制方案。
运用LabVIEW编程语言进行由运动控制卡、伺服电机及其驱动器所组成的单轴或多轴伺服控制系统开发具备系统调试方便、稳定性高等优点[5。
1伺服电机控制系统的硬件配置图1为单个伺服电机控制的硬件接线示意图。
硬件系统由ECMA-C20602SS伺服电机、ASD-B2-0221-B 伺服驱动器、PCI1245运动控制卡、ADAM-3952接线端子板、24V直流电源和电脑等组成[]。
台达B2 位置模式接线和参数设置
前言:笔者在做项目过程中,接触到台达B2系列伺服驱动器,将伺服的使用总结一下,控制部分为单片机,非PLC。
因为是第一次使用,个人能力有限,仅供参考,希望和大家一起交流,一起进步。
实验设备:台达伺服电机驱动器ASDA-B2-0721-B,伺服电机ECMA-C20802ES,单片机控制板。
实验目的:单片机电路板发出脉冲控制伺服电机驱动器(位置模式),使用伺服电机正反转,驱动器反馈脉冲给单片机控制电路,使其能精确控制机械位置。
ASDA-B2-0721-B驱动器位置模式(PT)特点:1、外部输入脉冲的频率确定转动速度的大小。
2、脉冲数来确定转动的角度。
实验内容:1、按ASDA-B2系列实用手册分别连接,控制回路电源L1c、L2c,主控制回路电源R、S,伺服电机输出U、V、W,地线,CN2电机编码器反馈接口。
注意:因为笔者使用的750W,主控制回路电源200~230VAC,驱动器上留有三相电接线,但个人感觉三相电线电压为380V,有可能损坏驱动器,所以建议直接两线,即220VAC 电源,笔者使用此方式,驱动正常。
2、按ASDA-B2系列实用手册调试电机JOG模式,确认驱动器和电机正常,具体参考手册,操作比较简单。
3、单片机控制板与驱动器ASDA-B2的CN1端口连接原理图,仅供参考。
图中MCU_I/O1控制方向引脚,MCU_PWM脉冲引脚,MCU_I/O2B2告警输出引脚,MCU_CAP反馈引脚,B2的DI1(9端子)配置为伺服电机使能引脚,因为上电直接使能,所以没有使用单片机控制,直接接低电平。
注意:此图使用是B2驱动器使用内部24V电源接线图,因为单片机控制板电压值较低,控制的输入输出均使用隔离,同时此接线方式是低速控制,B2驱动器速度脉冲最大200KHz,所以隔离开关通断频率要大于200KHz,同时反馈线的脉冲数要大于速度脉冲,隔离开关通断频率应更高。
图1控制板与伺服驱动器接线这里单单介绍的是I/O口的接线,具体电源接线,编码器,电机配线需要查阅相关的手册,这里不做过多介绍。
DORNA东菱伺服基础技术手册(中)
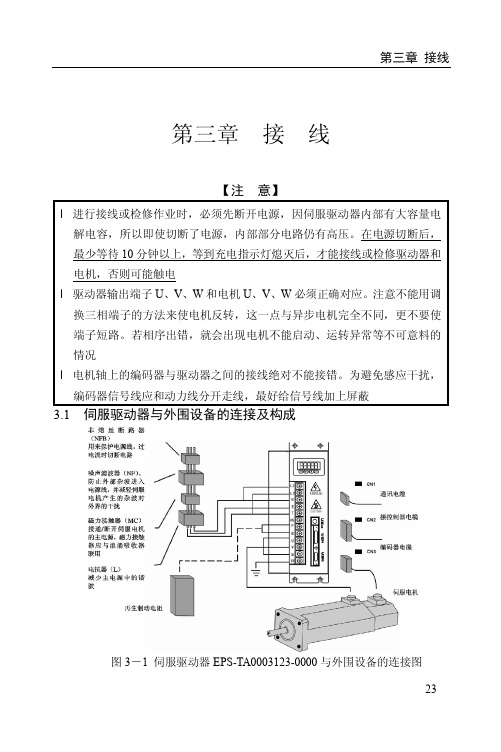
第三章 接线第三章 接 线【注 意】l 进行接线或检修作业时,必须先断开电源,因伺服驱动器内部有大容量电 解电容,所以即使切断了电源,内部部分电路仍有高压。
在电源切断后, 最少等待 10 分钟以上,等到充电指示灯熄灭后,才能接线或检修驱动器和 电机,否则可能触电l 驱动器输出端子 U、V、W 和电机 U、V、W 必须正确对应。
注意不能用调 换三相端子的方法来使电机反转,这一点与异步电机完全不同,更不要使 端子短路。
若相序出错,就会出现电机不能启动、运转异常等不可意料的 情况l 电机轴上的编码器与驱动器之间的接线绝对不能接错。
为避免感应干扰, 编码器信号线应和动力线分开走线,最好给信号线加上屏蔽3.1 伺服驱动器与外围设备的连接及构成图 3-1 伺服驱动器 EPS-TA0003123-0000 与外围设备的连接图 23第三章 接线3.2 标准接线 1. 配线(1)电源端子 TB 线径:R、S、T、U、V、W、PE 端子线径≥1.5mm² (AWG14-16),L1、L2 端子线径≥1.0mm² (AWG16-18)。
驱动器功率越大需要 TB 端子线径越粗。
接地:接地线(PE)应尽可能粗,驱动器接地线与伺服电机接地线一点接 地,接地电阻<100Ω。
端子连接必须连接牢固。
建议电源采用三相隔离变压器供电,提高电源质量和抗干扰能力。
请安装非熔断性(NFB)断路器,以便驱动器出现故障时能及时切断电源。
建议安装噪声滤波器(NF)、磁力接触器(MC)、电抗器(L),防止外部杂 波进入电源,减轻伺服电机产生的杂波对外界的干扰。
(2)通讯信号 CN1、控制信号 CN2、编码器信号 CN3 线 径 : 建 议 采用 屏 蔽 电 缆( 最 好 采用 双 绞 屏蔽 电 缆),线 径 ≥0.12mm² (AWG24-26)。
线长:电缆长度尽可能短,控制信号线 CN2 电缆不超过 5 米,编码器信号 电缆长度不超过 15 米,编码器电源和地线应分别采用 4 组以上芯线并联。
艾威图w系列伺服说明书

FG 43
19
机壳地
位置控制的标准接线
1
电机 4 芯插头
光电编码器 15 芯插头
编码器 信号输出 编码器 Z 信号 集电极开路输出 编码器信号地
PDF 文件使用 "pdfFactory Pro" 试用版本创建 w–w1w.0fi–
驱动器的连接
速度控制接线图
三相AC220V(≥1.0KW) 单相AC220V(<1.0KW)
功 率 零速转矩 额定转速 额定电流
(Kw) (Nm) (Rpm) (A)
0.4
2
3000
4
0.75
2
3000
4
0.6
2
3000
4
1.2
4
3000
5
1.5
5
3000
6
1.2
6
2000
6
1.8
6
3000
8
0.6
4
2500
4
1.0
4
2500
4
1.3
5
2500
5
1.5
6
2500
6
1.6
7.7
2000
6
2.4
7.7
3000
9
1.5
10
1500
6
2.6
10
2500
10
2.3
15
1500
10
PDF 文件使用 "pdfFactory Pro" 试用版本创建 ww–w7.f–
驱动器的使用
使用环境 防护
伺服驱动器自身结构无防护,因此必须安装在防护良好的电柜内,并防接触 腐蚀性、易燃性气体,防止导电物体、金属粉尘、油雾及液体进入内部。
交流伺服电机控制接线图
交流伺服电机控制接线图在工业自动化领域中,交流伺服电机控制是一种常见且重要的控制方式。
通过正确的接线方式,可以实现对伺服电机的精确控制,从而提高生产效率和产品质量。
接下来将介绍交流伺服电机的控制接线图及其相关内容。
1. 伺服电机接线原理伺服电机是一种能够精确控制位置、速度和转矩的电机,其原理是通过加速、减速和定位控制来完成各种运动任务。
在控制伺服电机时,需要正确连接电源、编码器、控制器等部件,才能实现预期的运动控制效果。
2. 伺服电机控制接线图示例下图为交流伺服电机的简化控制接线图示例:+----------+ +-------------+ +---------------------+ +----------+| 电源输入+------+ 电机控制器+------+ 伺服电机 +------+ 电源输出 |+----------+ +-------------+ +---------------------+ +----------+3. 接线图解析•电源输入:将外部电源接入电机控制器,提供工作电压和电流。
•电机控制器:接收来自外部信号的控制指令,控制电机的运动。
•伺服电机:根据电机控制器的指令,精确控制自身的位置、速度和转矩。
•电源输出:将经过控制的电流输出给伺服电机,驱动电机执行相应的运动任务。
4. 接线注意事项•接线前需确认电源和信号线路连接正确,避免短路和反接等问题。
•选择合适的电源和控制器,以确保伺服电机正常工作。
•定期检查接线是否松动或损坏,确保设备正常运行。
通过正确连接交流伺服电机的各个部件,可以有效实现对电机的精确控制,提高生产效率和产品质量,为工业自动化提供有力支持。
以上是关于交流伺服电机控制接线图的简要说明,希望对您有所帮助。
数控系统伺服驱动器接线及参数设定
7
BRK-OFF
-9-
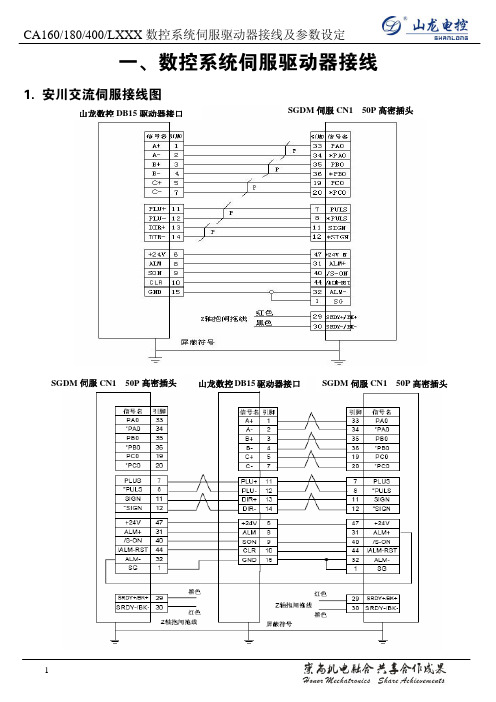
CA160/180/400/LXXX 数控系统伺服驱动器接线及参数设定
18. 信捷 DS2-AS 系列伺服接线图
山龙数控DB15驱动器接口
A+
1
A-
2
B+
3
B-
4
Z+
5
Z-
7
ALM
8
CLR 10
PU+ 11 PU- 12
DR+ 13 DR- 14
+24V 6 GND 15
SON
4. 台达 ASD-A 型伺服接线图
山龙数控DB15驱动器接口
A+
1
A-
2
B+
3
B-
4
Z+
5
Z-
7
PU+ 11 PU- 12
DR+ 13 DR- 14
ALM
8
CLR 10
+24V 6 GND 15
双绞线
SON
9
Z轴抱闸拖线(红) Z轴抱闸拖线(黑)
台达ASDA-A系列伺服器50P高密插头
21 22
25 23
1
D03 ALM
17 DI1+SON
18 DI2 ARST
4
COM+
13
COM-
16 DO1+ 13 COM-
-3-
CA160/180/400/LXXX 数控系统伺服驱动器接线及参数设定
6. 台达 ASDA-B 型伺服接线图(双驱动器接线)
台达ASDA-B型 DB25(两排针孔)
OA
10
/OA
伺服案例1 相对位置控制模式

32位寄存器 D8140与D8142用于对Y0或Y1输出脉冲的计数。当正转时为加 计数器,反转是数值减小。
(在绝对位置控制中当前值计数器非常重要,伺服走动的距离是以计数器数 值为参照的。在以后的案例中会有详细讲解。)
在下图中,如果人的位置是在2米处,那么D8040(当Y0输出时)的数据就是2。
X0停止 X1原点回归 X2点动+ X3点动X4自动自动 X5自动反转 X6原点 X7正转极限 X10反转极限 X11伺服故障输出 X12急停
Y0脉冲输出 Y1方向信号 Y2滞留脉冲清除 Y3伺服复位
二(6_1)PLC程序,SFC形式
1、频率与速度的转换程序
电机转速=PLC脉冲频率*(电子齿轮比/131072*60) PLC脉冲频率=脉冲频率/(电子齿轮比/131072*60)
2、PLC紧急情况设定
3、PLC相关参数设定
4、SFC步进块入口
5、SFC各个块
6、原点回归块
7、点动正转块
8、点动反转块
9、自动正转块
10、点动反转块
二(6_2)PLC程序,梯形图形式
二(6_3)加往返定位功能
正向定位结束1S后, 再往返回起点
补充案例
例 电机最高转速3000转/分钟:每 转PLC要向其发送800个脉冲,电 机每转丝杆位移5mm。加减速时 间1S。匀速为100mm/S,停止速 度10mm/S。
什么是命令脉冲?什么是电子齿轮比?什么是偏差计数器? 什么是数/模转换器?什么是反馈脉冲?
什么是命令脉冲? 命令脉冲由上位机(本例即PLC)发出的脉冲串。
相对位置指令DDRVI可以由Y0或Y1口输出指定数量指定频率的脉冲串。 按上图接线,放大器由CN1A_3和CN1A_10脚完成脉冲接收。
数控系统伺服驱动器接线及参数设定

一、数控系统伺服驱动器接线1.安川交流伺服接线图山龙数控DB15驱动器接口SGDM伺服CN1 50P高密插头SGDM伺服CN1 50P高密插头SGDM伺服CN1 50P高密插头山龙数控DB15驱动器接口2.松下交流伺服接线图山龙数控DB15驱动器接口松下Minas A4/A5伺服 50P高密插头3.三菱 MR-E型伺服接线图山龙数控DB15驱动器接口三菱MR-E-A (26P高密)4. 台达ASD-A 型伺服接线图山龙数控DB15驱动器接口台达ASDA-A系列伺服器50P高密插头5. 台达ASDA-B 型伺服接线图A+A-B+B-Z++24V Z-PU+PU-DR-DR+GNDOA /OA OB /OB 10231211242512345671112131415OZ /OZ 2221PLUSE /PLUSE 2019SIGN /SIGN 413COM+COM-双绞线118D03 ALM DI2 ARST ALM CLR 810SON 917DI1+SON 台达ASDA-B型DB25(两排针孔)山龙数控DB15驱动器接口1613DO1+COM-Z轴抱闸拖线(红)Z轴抱闸拖线(黑)6. 台达ASDA-B 型伺服接线图(双驱动器接线)DB15驱动器接口A+A-B+B-Z++24V Z-PU+PU-DR-DR+GND OA /OA OB /OB 10231211242512345671112131415DB25(两排针孔)OZ /OZ 2221PLUSE /PLUSE 2019SIGN /SIGN 413COM+COM-双绞线118D03 ALM DI2 ARST ALM CLR 810SON 917DI1+SON 台达ASDA-B型山龙数控OA /OA OB /OB 102312112425DB25(两排针孔)OZ /OZ 2221PLUSE /PLUSE 2019SIGN /SIGN 413COM+COM-双绞线118D03 ALM DI2 ARST 17DI1+SON台达ASDA-B型1613DO1+COM-Z轴抱闸拖线(红)Z轴抱闸拖线(黑)1613DO1+COM-Z轴抱闸拖线(红)Z轴抱闸拖线(黑)7. 富士伺服接线图山龙数控DB15驱动器接口A+A-B+B-Z++24V Z-PU+PU-DR-DR+GNDFFA *FFA FFB *FFB 9101112232412345671112131415富士FALDIC-β伺服(26P高密插头)FFZ *FFZ 78CA *CA 2021CB *CB 114P24M24双绞线153OUT1CON2 RST ALM CLR 810SON 92CON1 RUN8.日立伺服接线图山龙数控DB15驱动器接口日立ADA系列伺服驱动器山龙数控DB15驱动器接口三洋PY系列DB50高密插头10. 三洋 R 系列伺服接线图山龙数控DB15驱动器接口三洋R系列DB50高密插头11. 开通 KT270系列伺服接线图山龙数控DB15驱动器接口A+A-B+B-Z++24V ALM Z-SONCLR PU+PU-DR-DR+GND LA LAR LB LBR 7168172526123456789101112131415开通KT270系列伺服驱动器LZ LZR 1512ALM RES 111PP PG 1019NP NG 2023COMO COM12SON双绞线12. 四通(现更名为森创)GS 系列伺服接线图山龙数控DB15驱动器接口A+A-B+B-Z++24V ALM Z-SONCLR PU+PU-DR-DR+GND A信号差分输出+A信号差分输出-B信号差分输出+B信号差分输出-333435363132123456789101112131415四通GS系列伺服DB44针Z信号差分输出+Z信号差分输出-228故障信号输出+报警清除信号输入1227脉冲指令信号输入+脉冲指令信号输入-1328方向/脉冲指令信号输入+方向/脉冲指令信号输入-76输入公共端COM 故障信号输出-23伺服使能(伺服ON)输入21BRAKE+Z轴抱闸拖线(红)5BRAKE-Z轴抱闸拖线(黑)双绞线13. 东元 TSDA 系列伺服接线图山龙数控DB15驱动器接口东元TSDA系列伺服器50P高密插头山龙数控DB15驱动器接口A+A-B+B-Z++24V ALM Z-SON CLRPU+PU-DR-DR+GND PA /PA PB /PB 161718192021123456789101112131415东元ESDA系列伺服DB25插头(双排)PC /PC 14ALM 45PP /PN 67DP /DN 1022+24V N241SON 双绞线CLR 2FG2515. 松下J 系列伺服接线图山龙数控DB15驱动器接口A+A-B+B-Z++24V ALM Z-SONCLR PU+PU-DR-DR+GND OA+OA-OB+OB-131415161718123456789101112131415松下J系列伺服驱动器26P高密插头OC+OC-83ALM A-CLR 2021PULS1PULS22223SIGN1SIGN2111COM+COM-2SRV-ON 10BRK-OFFZ轴抱闸拖线双绞线山龙数控DB15驱动器接口A+A-B+B-Z++24V ALM Z-SONCLR PU+PU-DR-DR+GND PAO /PAO PBO /PBO 333435361920123456789101112131415东菱EPS-B1系列伺服驱动器50P高密插头PZO /PZO 3145ALM A-CLR 1617PULS+PULS-2324SIGN+SIGN-471,2,32COM+GND 40SRV-ON 25BK+Z轴抱闸拖线(红)26BK-Z轴抱闸拖线(黑)双绞线17. 东菱EPS-TA 系列伺服接线图山龙数控DB15驱动器接口A+A-B+B-Z++24V ALM Z-SONCLR PU+PU-DR-DR+GND PAO /PAO PBO /PBO 171815161413123456789101112131415东菱EPS-TA系列伺服驱动器DB-36P插头PZO /PZO 521ALM A-CLR 910PULS+PULS-1112SIGN+SIGN+2225COM+GND 24S-ON 7BRK-OFFZ轴抱闸拖线双绞线18. 信捷DS2-AS 系列伺服接线图山龙数控DB15驱动器接口A+A-B+B-Z++24V ALM Z-SONCLR PU+PU-DR-DR+GND AO+AO-BO+BO-6710589123456789101112131415信捷DS2-AS系列伺服驱动器VGA-15P插头ZO+ZO-138ALM A-CLR 21P+5V P-54D+5V D-1114+24VIN COM 7/S-ON双绞线19. 欧瑞传动SD10系列伺服接线图山龙数控DB15驱动器接口A+A-B+B-Z++24V ALM Z-SONCLR PU+PU-DR-DR+GND PAO+PAO-PBO+PBO-181716153231123456789101112131415欧瑞传动SD10系列伺服器50P高密插头PZO+PZO-209ALM AL-RST 4443P+5V P-4039D+5V D-419,49GP COM 5/SONI双绞线二、伺服驱动器参数设定1.安川Σ-Ⅱ系列伺服参数设定用安川伺服驱动器,设定以下参数后,机床即可工作。
《变频及伺服应用技术》项目6 伺服电机的应用2016.7

重庆工业职业技术学院 郭艳萍
变频及伺服应用技术
(3) 编码器 伺服电动机的编码器是用来检测转速编和码位器置。编码器
到目前为止,高性能的电伺服系统大多采用永磁同步型交流伺服电动机, 控制驱动器多采用快速、准确定位的全数字位置伺服系统。典型生产厂 家如德国西门子、美国科尔摩根和日本三菱、松下及安川等公司。
重庆工业职业技术学院 郭艳萍
变频及伺服应用技术
知识链接——伺服电机生产商
1、日本安川电机制作所推出的小型交流伺服电动机和驱动器,20世纪90 年代先后推出了新的D系列和R系列,之后又推出M、F、S、H、C、G 六 个系列。。其中D系列适用于数控机床(最高转速为1000r/min,力矩为 0.25~2.8N.m),R系列适用于机器人(最高转速为3000r/min,力矩为 0.016~0.16N.m)。这样,只用了几年时间形成了八个系列(功率范围为 0.05~6kW)较完整的体系,满足了工作机械、搬运机构、焊接机械人、 装配机器人、电子部件、加工机械、印刷机、高速卷绕机、绕线机等的 不同需要。
搬运机(垂直)
由于导入了伺服机构,可提高机械速度,从而提高 生产效率。 可在指定位置正确停止,采用带电磁制动器的伺服
电机,可防止停车时货物下降。
自动仓库·分拣系统
自动仓库·分拣系统在自动仓库中,分拣部和行走部 都已越来越多地采用AC伺服电机,可实现高速运行 以及平稳的及加减速。 与SCM(供应链管理)相结合的自动仓库·分拣系统 从原料采购到商品发送等各个环节,可大大提高物 流库存管理的效率。
(2)直流(DC)伺服系统
50年代,无刷电机和直流伺服电机实现了产品化,并在
计算机外围设备和机械设备上获得了广泛的应用。70年代则
伺服驱动器接线原理图说课讲解
必须与电机U、V、W端子对应连接
TB-6
V
TB-7
W
TB-8
r
控制电源
单相
控制回路电源输入端子~220V 50Hz
备注:在SD15M的TB1中不用接。
TB-9
t
反馈信号端子CN1
端子号
信号名称
端子记号
颜色
功能
记号
I/O
方式
CN1-5
CN1-6
CN1-17
CN1-18
5V电源
+5V
伺服电机光电编码器用+5V电源;
P,S
CN2-24
编码器Z相信号
ZOUT+
Type5
P,S
CN2-11
ZOUT-
P,S
CN2-2
编码器Z相集电极开路输出
CZ
Type6
P,S
1.编码器Z相信号由集电极开路输出,编码器Z相信号出现时,输出ON(输出导通),否则输出OFF(输出截止);
2.非隔离输出(非绝缘);
3.在上位机,通常Z相信号脉冲很窄,故请用高速光电耦合器
伺服报警输出端子。可以用PA27参数来改变报警输出电平高或低有效。
CN2-14
定位完成输出
COIN
Type2
P
定位完成输出端子
COIN ON:当位置偏差计数器数值在设定的定位范围时,定位完成输出ON
CN2-4
超程保护
RSTP
Type1
P,S
外接超程保护信号,信号有效时产生Err—32报警
CN2-3
输出端子
ALRS
Type1
P,S
报警清
ALRS OFF:保持系统报警
plc如何控制伺服电机

PLC如何控制伺服电机以松下Minas A4系列伺服驱动器为例,介绍PLC控制伺服电机的方法。
伺服电机有三种控制模式:速度控制,位置控制,转矩控制{由伺服电机驱动器的Pr02参数与32(C-MODE)端子状态选择},本章简要介绍位置模式的控制方法。
一、按照伺服电机驱动器说明书上的"位置控制模式控制信号接线图"连接导线3(PULS1),4(PULS2)为脉冲信号端子,PULS1连接直流电源正极(24V电源需串连2K左右的电阻),PULS2连接控制器(如PLC的输出端子)。
5(SIGN1),6(SIGN2)为控制方向信号端子,SIGN1连接直流电源正极(24V电源需串连2K左右的电阻),SIGN2连接控制器(如PLC的输出端子)。
当此端子接收信号变化时,伺服电机的运转方向改变。
实际运转方向由伺服电机驱动器的P41,P42这两个参数控制。
7(com+)与外接24V直流电源的正极相连。
29(SRV-0N),伺服使能信号,此端子与外接24V直流电源的负极相连,则伺服电机进入使能状态,通俗地讲就是伺服电机已经准备好,接收脉冲即可以运转。
上面所述的六根线连接完毕(电源、编码器、电机线当然不能忘),伺服电机即可根据控制器发出的脉冲与方向信号运转。
其他的信号端子,如伺服报警、偏差计数清零、定位完成等可根据您的要求接入控制器。
构成更完善的控制系统。
二、设置伺服电机驱动器的参数。
1、Pr02----控制模式选择,设定Pr02参数为0或是3或是4。
3与4的区别在于当32(C-MODE)端子为短路时,控制模式相应变为速度模式或是转矩模式,而设为0,则只为位置控制模式。
如果您只要求位置控制的话,Pr02设定为0或是3或是4是一样的。
2、Pr10,Pr11,Pr12----增益与积分调整,在运行中根据伺服电机的运行情况相应调整,达到伺服电机运行平稳。
当然其他的参数也需要调整(Pr13,Pr14,Pr15,Pr16,Pr20也是很重要的参数),在您不太熟悉前只调整这三个参数也可以满足基本的要求.3、Pr40----指令脉冲输入选择,默认为光耦输入(设为0)即可。
伺服电机接线教程

伺服电机接线教程伺服电机是一种常用的电机控制设备,能够准确地控制电机的位置和速度。
正确地接线是伺服电机正常工作的关键,下面将为您介绍伺服电机的接线方法及步骤。
首先,我们需要明确伺服电机的接线端口。
一般来说,伺服电机有三个主要的接线端口:电源端口、控制信号端口和地线端口。
接下来,我们依次介绍每个接线端口的具体接线方法。
首先是电源端口。
伺服电机需要外部电源供电,所以我们需要将电源的正负极分别连接到伺服电机的正负电源端口。
一般情况下,电源电压应与伺服电机标签上标注的电源要求匹配,以确保电机的正常工作。
接着是控制信号端口。
伺服电机的控制信号通常由控制器(如PLC)提供。
控制信号端口通常分为三个引脚,分别是信号输入、信号地线和信号电源。
首先,我们需要将信号输入引脚连接到控制器的输出引脚,以接收控制器发送的控制信号。
同时,我们还需要将信号地线引脚连接到控制器的地线引脚,以确保信号的稳定传输。
最后,我们需要将信号电源引脚连接到控制器的电源引脚上,以为控制信号提供所需的电源。
同样,控制信号电压也应与伺服电机标签上标注的要求相匹配。
最后是地线端口。
地线端口用于连接伺服电机的地线,以实现电气接地。
通常,我们只需要将地线连接到电源或控制器的地线引脚上即可。
在进行接线之前,我们还需要注意以下几点:首先,确保电路处于断电状态下,以免发生触电事故。
其次,仔细查看伺服电机的接线图,确保正确地连接各个引脚。
最后,使用适当的电线规格进行接线,以确保电流的正常传输。
同时,需要注意接线处的接触良好,电线连接牢固,以免发生接触不良或接线松动等问题。
总结起来,伺服电机的正确接线方法主要包括电源端口、控制信号端口和地线端口的接线。
正确的接线能够确保伺服电机的正常工作,并提高电机控制的精度和稳定性。
在进行接线时,我们需要注意安全、仔细查看接线图并使用适当的电线规格。
只有正确地接线,我们才能充分发挥伺服电机的功能。
伺服驱动器控制模式的接线及其注意事项

伺服驱动器控制模式的接线及其注意事项伺服驱动器是一种用来控制伺服电机的设备,可以实现精确定位、速度控制和运动控制等功能。
在使用伺服驱动器时,正确的接线和注意事项非常重要,这样可以确保设备的安全性和稳定性。
下面将介绍伺服驱动器控制模式的接线以及注意事项。
一、伺服驱动器控制模式的接线1.电源接线:首先,应将伺服驱动器与适当的电源连接。
电源的选择应根据伺服驱动器的额定电压来确定,以避免过载和损坏设备。
接线时需要注意将正极和负极正确地连接到伺服驱动器上,以确保正常运行。
2.控制信号接线:伺服驱动器通常有多个控制信号接口,包括使能信号、方向信号和脉冲信号。
使能信号用于启用或禁用伺服驱动器,方向信号用于控制电机的转向,脉冲信号用于指示电机的运动位置。
这些信号应正确接线,以确保伺服驱动器正常工作。
3.反馈信号接线:伺服驱动器通常还有反馈信号接口,用于接收电机的转速和位置反馈信息。
这些信号可以是模拟信号或数字信号,接线时需要确保正确连接,以保证准确的位置控制。
4.通信接口接线:一些伺服驱动器还具有通信接口,用于与其他设备进行通信。
这些接口可以是串口接口、以太网接口或CAN接口。
接线时需要根据具体的通信协议和接口类型进行正确的连接,以确保通信的稳定和可靠。
二、注意事项1.接线前仔细阅读说明书:在进行伺服驱动器接线之前,应仔细阅读设备的说明书。
说明书中通常包含详细的接线图和接线步骤,按照说明书的要求进行接线可以避免错误和故障。
2.接线时断开电源:在进行伺服驱动器的接线时,务必断开电源,以避免电压冲击或其他危险。
3.注意接线的顺序:在进行伺服驱动器接线时,应注意按照正确的顺序进行接线。
通常,应先接地线,再接电源线,最后接控制信号线和反馈信号线。
4.使用合适的电缆和连接器:在进行伺服驱动器的接线时,应选择合适的电缆和连接器。
电缆应具有足够的电压和电流承载能力,连接器应可靠牢固,以确保接线的稳定性和可靠性。
5.避免干扰:在进行伺服驱动器的接线时,需要注意避免干扰。
伺服电机的PLC控制方法

伺服电机的PLC控制方法以松下Minas A4系列伺服驱动器为例,介绍PLC控制伺服电机的方法。
伺服电机有三种控制模式:速度控制,位置控制,转矩控制{由伺服电机驱动器的Pr02参数与32(C-MODE)端子状态选择},本章简要介绍位置模式的控制方法一、按照伺服电机驱动器说明书上的"位置控制模式控制信号接线图"连接导线3(PULS1),4(PULS2)为脉冲信号端子,PULS1连接直流电源正极(24V电源需串连2K 左右的电阻),PULS2连接控制器(如PLC的输出端子)。
5(SIGN1),6(SIGN2)为控制方向信号端子,SIGN1连接直流电源正极(24V电源需串连2K左右的电阻),SIGN2连接控制器(如PLC的输出端子)。
当此端子接收信号变化时,伺服电机的运转方向改变。
实际运转方向由伺服电机驱动器的P41,P42这两个参数控制。
7(com+)与外接24V直流电源的正极相连。
29(SRV-0N),伺服使能信号,此端子与外接24V直流电源的负极相连,则伺服电机进入使能状态,通俗地讲就是伺服电机已经准备好,接收脉冲即可以运转。
上面所述的六根线连接完毕(电源、编码器、电机线当然不能忘),伺服电机即可根据控制器发出的脉冲与方向信号运转。
其他的信号端子,如伺服报警、偏差计数清零、定位完成等可根据您的要求接入控制器。
构成更完善的控制系统。
二、设置伺服电机驱动器的参数。
1、Pr02----控制模式选择,设定Pr02参数为0或是3或是4。
3与4的区别在于当32(C-MODE)端子为短路时,控制模式相应变为速度模式或是转矩模式,而设为0,则只为位置控制模式。
如果您只要求位置控制的话,Pr02设定为0或是3或是4是一样的。
2、Pr10,Pr11,Pr12----增益与积分调整,在运行中根据伺服电机的运行情况相应调整,达到伺服电机运行平稳。
当然其他的参数也需要调整(Pr13,Pr14,Pr15,Pr16,Pr20也是很重要的参数),在您不太熟悉前只调整这三个参数也可以满足基本的要求.3、Pr40----指令脉冲输入选择,默认为光耦输入(设为0)即可。