足球机器人C++程序设计培训课件
机器人足球赛程序设计实验指导书

机器人足球赛程序设计实验指导书(本指导书版权归合肥工业大学机器人足球研究小组所有)实验1 机器人足球比赛编程预备知识1、实验目的掌握RoboCup仿真机器人足球比赛相关知识点,具体内容如下:(1) L inux操作系统的熟悉及了解其基本操作。
(2) 掌握Linux下如何进行C++编程,了解gcc编译器以及一些简单编辑工具,如:vi、emacs、gedit、Anjuta、Kdevelope等。
(3) 启动RoboCup仿真(2D)足球队的比赛。
2、实验设备硬件环境:PC机软件环境:操作系统Linux3、实验内容(1)掌握Linux一些常用的命令:z更改账号密码格式:passwd输入后,屏幕显示:Old password: <输入旧密码>New password: <输入新密码>Retype new password: <确认新密码>z联机帮助格式: man [命令名]例如: man ls屏幕上就会显示所有ls的用法。
z文件或目录处理格式:ls [-atFlgR][name]第一项是一些语法加量。
第二项是文件名。
常用的方法有:ls 列出当前目录下的所有文件。
ls –a 列出包括以.开始的隐藏文件的所有文件名。
ls –t 依照文件最后修改时间的顺序列出文件名。
ls –F 列出当前目录下的文件名及其类型。
以/结尾表示为目录名、以*结尾表示未可执行文件、以@结尾表示为符号连接。
ls –l 列出目录下所有文件的权限、所有者、文件大小、修改时间及名称。
ls –lg 同上,并显示出文件的所有者工作组名。
ls –R 显示出目录下以及其所有子目录的文件名。
z改变工作目录格式:: cd [name]name :目录名、路径或目录缩写。
常用的方法有:cd 改变目录位置至用户登录时的工作目录。
cd dirl 改变目录位置至dirl目录下。
cd ~user 改变目录位置至用户的工作目录。
机器人足球比赛的培训教程

教育机器人界的后起之秀集研发、生产、售后于一体稳定而值得信赖的产品称心而倍感温暖的服务机器人爱好者寻找灵感的乐园蒙器蒙器电子机器人事业部产品包含:基于教学机器人平台的单片机系列,传感器系列,机械系列等,并且提供项目式培训服务。
2009年,蒙器电子与中科院上海社会科学进修学院机器人部强强联手,开设了富有特色的系统培训,共分为4阶段各16课时。
从无到有,从有到悟。
使学生真正参与到机器人教学之中,完全摆脱比赛等功利性因素,并通过角色的变换:学——自学——授学——被学,逐步成长为一个科技型通用人才。
�智能机器人具有:直观、兴趣激发和挑战性的特点�智能机器人集成了数学、物理、机械、电子、材料、能源、计算机硬件、软件、人工智能等众多领域的科学与技术知识,没有一种教学平台比智能机器人更综合�智能机器人适合运用在各种项目或比赛中,学生在实施智能机器人项目的自主体验过程中,培养其动手能力、创新力、综合能力、协作能力和进取精神等各种能力�教育部门的极大认可:2010年普通高校招收保送生办法一、经教育部批准(或备案的具有实施普通高等学历教育资格的高校可按本办法招收保送生。
二、选拔保送生的条件……(四高中阶段在全国青少年科技创新大赛…………全国中小学电脑制作活动中获得一、二等奖的应届高中毕业生。
�国际机器人足球世界杯赛—是目前国际上最具影响力的赛事,简称为比赛�由教育部中央电化教育馆举办的全国中小学电脑制作大赛�由中国科协举办的中国青少年机器人大赛�由全国信息创新组委会创办的全国中小学信息技术创新与实践活动蒙器机器人采用了高性能和高开放平台数字处理器,高速、稳定,接口齐全,是优秀的应用程序、系统数据采集控制、程序课程教学和高级应用开发的硬件平台。
此硬件平台支持使用(一种简化的标准C 语言)进行程序开发,同时配备图形化C 语言软件平台。
蒙蒙教学机器人•外形可爱•可相互通信•可语音播放•寓教于乐灭火机器人•外形紧凑•合理的硬件设计•精妙的软件策略•适合多项灭火比赛足球机器人(三驱•2011教育部规则•紧凑的设计理念•智能化的完美体现足球机器人(四驱•2011规则•冠军机型•软件策略精妙篮球机器人•防守稳健•进攻犀利•三分王•适合教育部篮球比赛�2007年安徽省全国中小学电脑制作大赛机器人省赛初中组获得足球冠军�2007年广东省全国中小学电脑制作大赛机器人省赛小学组获得足球冠军�2007年全国机器人大赛中小学电脑制作大赛获得高中组足球第五�2008年世界杯中国赛区选拔赛包揽小学组足球冠、亚军�2008年上海市全国机器人大赛选拔赛获得小学组足球冠军、季军、第四名;初中组足球冠军、亚军;高中组足球冠军�2008年湖南省全国中小学电脑制作大赛机器人大赛省赛蒙器机器人获得小学组足球亚军�2008年黑龙江省全国中小学电脑制作大赛机器人大赛省赛蒙器机器人获得高中组足球冠军�2008年世界杯总决赛初级组足球冠军;并获得100%胜率嘉奖�2008年全国中小学电脑制作大赛机器人大赛小学组足球二等奖;初中组三等奖;高中组二等奖和三等奖�2008年安徽省中小学电脑制作机器人选拔赛获得高中组足球季军�2008年全国中小学电脑制作大赛机器人高中组获得足球第五,第六名�2008年上海赛区选拔赛获得小学组足球冠军�2009年上海市全国机器人大赛选拔赛获得小学组足球第三名;初中组足球冠军�2009年全国中小学电脑制作大赛获得初中组亚军,高中组冠军�2010年北京市中小学电脑制作大赛小学组足球亚军�2010年湖南省中小学电脑制作大赛高中组足球冠军�2010年广东省中小学电脑制作大赛小学组足球亚军�2010年黑龙江省中小学电脑制作大赛高中组篮球冠军�2010年上海市中小学电脑制作大赛高中组足球冠军;初中组足球亚军和季军;小学组足球亚军�2010年全国中小学电脑制作大赛高中组篮球冠军、初中组足球亚军�2011年世界杯比赛上海选拔赛足球小学组冠军�2011年世界杯全国赛轻量组足球小学组一等奖、二等奖、中学组轻量组足球一等奖、二等奖,并获得2011年土耳其世界赛重量组中学组足球参赛资格�时间:2006年3月地点:山东潍坊潍坊市机器人教师培训�时间:2006年4月地点:山东烟台山东省机器人教师培训�时间:2006年4月地点:江西南昌江西省机器人教师培训�时间:2006年4月地点:山东章丘章丘市机器人教师培训�时间:2006年5月地点:北京北京市机器人教师培训�时间:2006年5月地点:上海上海市机器人教练员培训�时间:2006年6月地点:北京北京市机器人教师培训(北京科协)�时间:2006年6月地点:上海全国机器人大赛各省决赛段教师培训�时间:2006年10月地点:广东顺德顺德市机器人教师培训�时间:2006年11月地点:广东广州广东省机器人教师培训(广东科协)�时间:2006年12月地点:重庆全国机器人教练员培训�时间:2006年12月地点:广西柳州柳州机器人教师培训�时间:2007年3月地点:广东佛山佛山市机器人教师培训�时间:2007年11月地点:上海上海市机器人教师培训�时间:2008年3月地点:广东顺德顺德区机器人教师赛前培训�时间:2008年5月地点:湖南长沙湖南省机器人比赛赛前培训�时间:2008年6月地点:安徽合肥合肥机器人教师赛前培训�时间:2008年11月地点:广东顺德顺德区机器人比赛赛前培训�时间:2009年3月地点:上海上海市机器人教师培训�时间:2009年4月地点:上海、合肥机器人比赛赛前培训�时间:2009年5月地点:湖南长沙湖南省机器人比赛赛前培训�时间:2009年5月地点:上海上海市机器人比赛赛前培训�时间:2009年7月地点:上海全国机器人比赛赛前培训�时间:2010年12月地点:上海上海选拔赛赛前培训�时间:2011年1月-7月地点:上海及各省各省选拔赛及全国赛赛前培训�05年第三届广东省中小学电脑制作大赛�06年山东潍坊市机器人选拔赛�06年中小学电脑制作大赛山东赛区选拔赛�06年第七届全国中小学电脑制作大赛�06年第七届全国创新大赛�06年北京市机器人选拔赛�06年中国赛区选拔赛(苏州)�06年第四届广东省中小学电脑制作大赛�06年中小学电脑制作大赛江西赛区选拔赛�07年江苏省电脑制作大赛�07年上海赛区选拔赛�07年中国赛区选拔赛(南宁)�07年第七届青少年机器人大赛�08年全国赛�08年世界杯比赛�08年第六届广东省中小学电脑制作大赛…………�08年安徽省电脑制作大赛之机器人选拔赛�08年第十二届全国中小学电脑制作大赛�09年上海市电脑制作大赛选拔赛�09年全国赛�09年湖南省电脑制作大赛选拔赛�09年安徽省电脑制作大赛选拔赛�09年第十一届全国中小学电脑制作大赛�10年第十二届全国中小学电脑制作大赛�11年上海市选拔赛�11年全国赛�11年教育部各省市选拔赛�11年教育部全国赛…………蒙器机器人培训基地激情讲课充满自信的对决夺冠后的自豪教与学的乐趣互动的教学领导鼎力支持老师积极思考。
机器人足球C语言教程
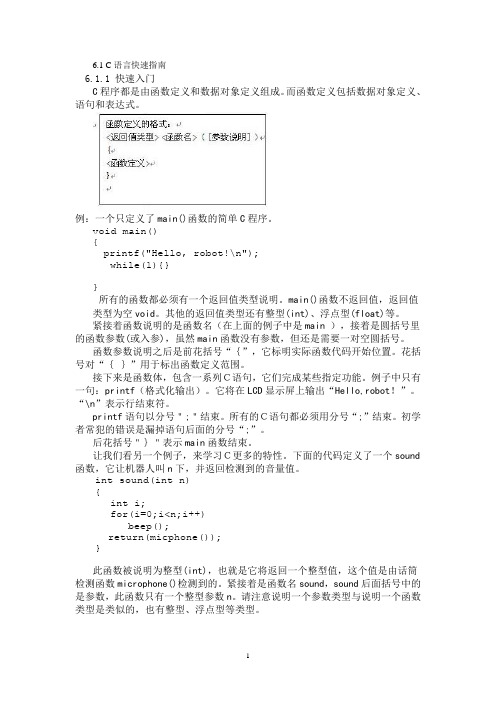
6.1 C语言快速指南6.1.1 快速入门C程序都是由函数定义和数据对象定义组成。
而函数定义包括数据对象定义、语句和表达式。
例:一个只定义了main()函数的简单C程序。
void main(){printf("Hello, robot!\n");while(1){}}所有的函数都必须有一个返回值类型说明。
main()函数不返回值,返回值类型为空void。
其他的返回值类型还有整型(int)、浮点型(float)等。
紧接着函数说明的是函数名(在上面的例子中是main ),接着是圆括号里的函数参数(或入参),虽然main函数没有参数,但还是需要一对空圆括号。
函数参数说明之后是前花括号“{”,它标明实际函数代码开始位置。
花括号对“{}”用于标出函数定义范围。
接下来是函数体,包含一系列C语句,它们完成某些指定功能。
例子中只有一句:printf(格式化输出)。
它将在LCD显示屏上输出“Hello,robot!”。
“\n”表示行结束符。
printf语句以分号";"结束。
所有的C语句都必须用分号“;”结束。
初学者常犯的错误是漏掉语句后面的分号“;”。
后花括号"}"表示main函数结束。
让我们看另一个例子,来学习C更多的特性。
下面的代码定义了一个sound 函数,它让机器人叫n下,并返回检测到的音量值。
int sound(int n){int i;for(i=0;i<n;i++)beep();return(micphone());}此函数被说明为整型(int),也就是它将返回一个整型值,这个值是由话筒检测函数microphone()检测到的。
紧接着是函数名sound,sound后面括号中的是参数,此函数只有一个整型参数n。
请注意说明一个参数类型与说明一个函数类型是类似的,也有整型、浮点型等类型。
在一个函数中定义的参数变量,如sound函数中的n,只在这个函数中有效。
别的函数也可以定义使用与之同名的参数变量,而不会相互干扰。
机器人程序设计(C语言)【ch07】多分支结构程序设计机器人循线运动 培训教学课件

首先,将4个QTI传感器分别用M3螺钉固定到相应杆件上,如图7-4所示。
用图7-4左侧的螺丝将4组QTI传感器安装模组固定到机器人前端,如图7-5所示。
再用套件中附带QTI的引脚连接到机器人的3-pin引脚上,将所有QTI传感器的 G N D 连 接 至 教 学 控 制 板 上 的 G N D, VCC 连 接 到 教 学 控 制 板 上 的 + 5 V, 然 后 将 S I G 连 接到C51单片机的4个I/O端口上(见图7-5)。
新工科建设之路·机器人技术与应用系列
01
本项目使用的QTI(QuickTrack Infrared)传感器如图7-2所示。 它的工作原理同第6章的红外发射器和接收器的原理相同,只是对两个电路进行了
封装,并用一个信号线来实现对红外光的发射和接收控制,节约了单片机微控制 器的宝贵接口(引脚)资源。
将以上需要修改的部分添加到任务7.4的算法中,得到解决机器人游历的通用算法: (1)检测4个QTI传感器的返回值。 (2)根据4个QTI传感器的返回值,决定机器人的运动方式。 (3)不断重复步骤(1)和(2),直至机器人到达深圳结束。
实现以上算法的一个关键是时刻知道机器人的运行状态,即刚刚到达过哪个景点。 这可以通过在源文件开始位置再定义一个全局变量来进行跟踪:
03
连接好电路,接下来编写一个测试程序,以检查各QTI传感器是否连接正确,并正 常工作。参考触须测试程序和红外传感测试程序,可以编写一个程序,完成如下 功能:
(1)读取每个QTI传感器信号脚的电平高低。 (2)将读取的结果通过串口送到PC显示。
测 试 程 序 : Te s t 4 Q T I . c
前进的方向由MaxVec决定,最大速度大于0时,为前进,小于0时,为后退。
机器人的搭建及编程培训课程

掌握异常处理机制,学习使用调试工具进行 程序调试。
编程实例分析与练习
实例分析
01
通过分析典型的机器人编程实例,如循迹小车、机械臂控制等,
理解编程原理与实现方法。
编程练习
02
进行针对性的编程练习,如编写简单的机器人控制程序、实现
基本的人机交互功能等,巩固所学知识。
团队协作与分享
03
鼓励学员分组协作,共同完成较复杂的机器人编程项目,并分
享经验与技巧。
04
机器人运动控制
运动控制原理与方法
运动控制基本概念
介绍运动控制的基本定义、 原理及在机器人领域的应 用。
运动控制方法
详细阐述开环控制、闭环 控制(反馈控制)以及复 合控制等方法的原理及特 点。
控制器设计
讲解控制器的基本结构、 设计原则以及常用控制算 法,如PID控制、模糊控制 等。
电机驱动与调速技术
电机类型及工作原理
介绍直流电机、交流电机、步进电机和伺服电机等常见电机的类 型、工作原理及特点。
电机驱动技术
阐述电机驱动的基本原理、驱动电路设计及保护措施。
调速技术
讲解电机的调速方法,如PWM调速、变频调速等,并分析各种 调速技术的优缺点及应用场景。
运动控制编程实践
编程环境与工具
传感器与数据获取 讲解机器人常用的传感器类型,如激光雷达、深度相机等, 以及如何通过传感器获取环境信息。
地图构建与定位 详细阐述基于SLAM技术的地图构建方法,包括特征提取、 数据关联、地图优化等步骤,并介绍机器人在地图中的定 位方法。
路径规划与避障策略
路径规划算法
介绍常用的路径规划算法,如A*、Dijkstra等,并分析其优缺点及 适用场景。
机器人足球项目.ppt

机器人足球项目规则解读
规则解析 球的运动
比赛机器人不能“占据”球、不能“持球”, 即:机器人不能通过堵死球的移动方向来完全 控制球。例如:将球固定在机器人身上,或使 用机器人身体将球包围,阻止其他机器人触球。 任何时候球都必须是可见的着地运动,它不能 被压在机器人底下;不允许使用包围夹子或圆 圈,其他机器人必须能触到球。裁判员一旦发 现“持球”或“占据”球,将立即取消参赛队 的比赛资格。
机器人足球项目规则解读
规则解析 坠球
由裁判员将足球放在距原在位置最近的坠 球点上,双方机器人可摆放在距足球15cm 以外的任意地方;裁判吹哨后,开始继续 比赛。在摆放机器人位置时,各队在自己 半场具有优先摆放权。
机器人足球项目规则解读
规则解析 任意球
获得任意球的一方可以在球附近(2-5cm)放 置一个机器人,其他参赛机器人应放置在 离球25cm以外。 由裁判员将足球放在发生犯规的地方,如 果犯规地点距墙壁小于15cm,则将球放在 距墙壁15cm处。 防守违例、出界球、点球未中时,判对方 在最近的坠球点罚任意球。 裁判鸣哨后,继续开始比赛。开任意球的 机器人触球后,其他机器人方可触球。
进攻机器人设计思路-护球法(适合初、高中)
机器人足球项目规则解读—名词定义解释
1.出界球:足球(越过墙壁)被机器人踢出球场外。 2.进球:足球的中心(即球的1/2以上)越过球门线 且非出界球,即为进球。 3.死球:足球被机器人和墙夹在中间无法移动、或 被多个机器人包围卡住不动超过5秒钟时,则为死球。 4.比赛中断:比赛过程中,在20秒内没有任何机器 人触到球,而且看上去没有机器人将会触到球,为比 赛中断。
比赛期间允许机器人将球踢起,但踢起的高度 不能威胁到观众、裁判或队员的安全。
教学课件第11课足球机器人
1、编码板的使用 2、遥控器的调试及使用方法
课程准备
教具、PPT、小贴画、小游戏;
板书
教学过程
一节课所学到的知识点(5分钟)
2、猜谜语:一瓜生得怪,有黑又有白,剖开不能吃,踢它人人爱(打一体育用品))(5分钟)
1、遵守课堂常规
2、能说出几种运动
2、编码板的使用方法
熟记机器人名称、功能,能够课后讲给家长
课后反思
乐博乐博教案
课程名称
足球机器人
任课教师
课次
第11课
日期时间
教学目标
知识目标
1、了解足球的特点及规则;
2、熟练使用编码板和编码积木;
能力目标
1、通过观察、分析、设计来组装足球机器人;
2、自主搭建足球机器人;
3、能够向大家介绍自己的机器人结构、功能,讲解编程方法;
情感目标
1、坚持锻炼身体,健康成长;
2、感受各项运动对我们身心健康所带来的好处;
3、回答老师的提问并能说出自己的想法
探索体验
(65分钟)
1、通过PPT介绍足球机器人的结构(5分钟)
2、介绍足球比赛的规则及特点,插入课堂小游戏(10分钟)
3、足球机器人的分步组装,课中适当时候让孩子们统一喝水、上厕所(40分钟)
4、创意搭建(5分钟)
5、课堂互动游戏(5分钟)
1、能和老师很好的互动,掌握各部件的名称
2、熟记足球机器人的结构
3、能连好线,调试CPU,体验程序的变化。
4、在老师的指导下能有序的完成各步组装
5、创意讲解分享
6、参与互动游戏,遵守课堂纪律
反思学习
(10分钟)
1、回想一下在搭建时遇到的困难2、需要注意的重点事项
足球机器人教程4
四、比赛规则
• 见附件。
比赛演示
• 演示比赛……
• 传中射门… • 门前盘带…
五、方法与模式举例
• 1.信息获取与存储
信息获取、积累、预测
• 信息获取:感觉、查询、解析。 • 信息积累:保存必要的信息。
• 信息预测:①非常重要、困难;②空间大, 要有针对性;
球的位置预测
• • • • 考虑因素: 速度衰减(建立速度正常衰减模型) 边界反弹与衰减(建立边界反弹模型) 队员干扰(建立对手干扰模型)
• 设计模型2问题: • 世界模型单一; • 规则的使用不连续;
前锋
后卫
守门员
足球机器人系统四层决策推理模型示意图
•设计模型3:
队形确定 及 队形变换 队形
队形1 队形m
既定队形
...
环境感知模型 角色集1 传感器信息融合 信息预处理 特征状态提取 角色1
...
角色分配 及 角色转换
角色集m
• 5。完成!
Strategy (…) 函数
• • • • • • • • • • • • • void Strategy ( Environment *env ) { switch (env->gameState) { case 0: MoonFollowOpponent ( &env->home [1], &env->opponent [2] ); MoonFollowOpponent ( &env->home [2], &env->opponent [3] ); MoonFollowOpponent ( &env->home [3], &env->opponent [4] ); MoonAttack ( &env->home [4], env ); Goalie ( &env->home [0], env ); break; case FREE_BALL:
机器人足球技术培训ppt课件

图片资料
微型足球机器人系统结构 CCD摄像头
CCD摄像头
pc 无线发射器
微型足球机器人系统
pc 无线发射器
平台和底层
平台:机器人足球比赛专用软件 底层:体现人策略思想的C语言代码
平台
返回球场信息
动态连接
底
库(dll)
层
程
序
给机器人指定驱动力
机器人足球技术培训 (基础篇)
SimuroSot 5vs5 ( 仿真)
1
;.
本讲主要内容
机器人足球概述
仿真(5vs5)平台介绍
使用VC开发简单的策略程序 第
机器人技术
机器人技术是在新技术革命中迅速发展起来的一项高新技术,是一门综合性学科,它综合了多 种基础学科、技术学科及新兴科技领域的多方面知识,突出地体现了当代科学技术发展的高度分化 而又高度综合这一特点,并已在众多的科学领域与工业部门中得到应用,且显示出强大的生命力。 因此世界各国都非常重视机器人技术的研究。
仿真系统与实体系统的比较
平台相当于足球机器人系统中的机器人实体、比赛场地、CCD摄像头 DLL相当于实体系统中的计算机主机,相当于机器人的大脑,它获取场上信息,然后将
处理结果发送给平台 平台和DLL每个周期互相交换数据,保证了比赛的实时性 理论上每个周期时长为1/60S,在一个周期,DLL接受平台传递过来的信息,然后行处理,
作
注意仅仅编译程序 就可以了,不要去
运行
如何让机器人动起来
(2)复制策略(strategy.dll) 步骤一:在上一步编译结束后会在底层程序文件夹中的debug或者release文件夹下面有 strategy.dll文件
机器人足球 第一章 引言PPT课件

整体 概述
一 请在这里输入您的主要叙述内容
二
请在这里输入您的主要 叙述内容
三 请在这里输入您的主要叙述内容
内容提纲
一、运动规划的基本问题 二、规划的一般涵义 三、运动规划问题和算法的特征 四、运动规划的应用 五、本课程的主要内容 六、实验课安排 七、课程进度与成绩评定 八、练习
本课 程机讨器论人“学机:器运人动学规”划中(的Mo“ti运on动P规lan划ni”ng问)题
Agent采用连续的运动(motion)完成任务
人工智能:智能规划(AI Planning)
Agent采用离散的动作(action)完成任务
三、运动规划问题和算法的特征来自3.1 运动规划问题的类型
按照规划解的形式分类
目的在于通过感知器获取信息来:建模建筑 物,寻找、追踪物体,探伤
……
3.2 规划算法的特征
完备性(Completeness)
完备:对于任一规划问题,如果该问题存在解,算 法就给出解,则称该算法是完备的。
不完备的:对于某些有解的规划问题,算法未给出 解,则称该算法是不完备的
相对于分辨率是完备的:对配置空间使用一定的方 式进行“离散化”,如果算法对于“离散化”后的 规划问题是完备的,则称该算法相对于这种离散化 方式是完备的。
4.9 逃生方式的模拟
主逃生路径
潜在的拥挤区域
次逃生路径
4.10 自主泊车
五、本课程的主要内容
几何学基础 移动式机器人(Mobile Robot)
基于网格模型的路径规划算法
Dijkstra算法及其变型 A*算法及其变型
关节式机器人(Articulated Robot)
建立配置空间的困难: • 几何学上的复杂度 • 空间的维数
机器人程序设计(C语言)【ch02】最简单的C程序设计--机器人做算术 培训教学课件
受到表示小数位的位数限制,float型数据的小数部分只能接受7位有效数字,所 以第一个123456.789数字的最后两位小数不起作用,最后就显示123456.8。
而在a=123456.789e5时,也是因为小数部分的有效数字是7位,加20的运算根 本体现不出。
为了提高浮点数的表示精度,还可以定义双精度浮点数(double)和长双精度浮点 数(longdouble)。
将项目编译、连接、生成执行代码,下载并运行,查看输出结果是否与图2-1一样。
RobotComputation.c是如何工作的
C语言用关键字int定义整型变量。int是英文单词integer(整数)的前三个 字母。
变量的定义
在程序执行过程中,其值可改变的量称为变量。 它们与数据类型结合起来分类,可以分为整型变量、浮点变量、字符变量等。
前面各例printf()函数中用到的“\n”就是一个转义字符,其意义是“回车换行”。
转义字符
通常使用转义字符表示用一般字符不便于表示的控制代码,如用于表示字符常量 的单引号(')、用于表示字符串常量的双引号(")和反斜杠(\)等。
表2-4给出了C语言中常用的转义字符。
转义字符
广义地讲,C语言字符集中的任何一个字符均可用转义字符来表示。表中的 “\ddd”和“xhh”正是为此而提出的。
字符变量
编写如下程序,编译、连接,生成可执行文件,下载执行,看看运行结果是否同 所预计的一样。
#include<uart.h> int main(void) char a,b,h;uart_init();a=97;b=98; printf("%c %c\n",a,b);printf("%d %d\n",a,b); while(1);
第六届NOC活动虚拟机器人足球竞赛哈尔滨培训讲稿ppt-

第六届NOC活动虚拟机器人足球竞赛
三、竞赛方式
2、比赛流程
第一阶段
第二阶段
资格赛
(获取进入下一阶段赛事资格)
分组单循环赛
(分值占总分80%)
机器人现场主题创作 (分值占总分20%)
恩欧希 教育信息化 发明创新奖
第六届NOC活动虚拟机器人足球竞赛
三、竞赛方式
3、比赛时间
场次
挑战时间
比赛方式
小学组资格赛 45分钟 现场编写机器人,并挑战小学组考核机器人
用户通过电脑编程去规划和控制机器人的动作,将编制好的虚拟机 器人放到电脑模拟的足球赛场上和其它用户写的虚拟机器人同台竞技, 在比赛的过程中去感受到学习所带来的快乐,并且在“玩”的过程中 不断学习程序设计和机器人策略算法。
第六届NOC活动虚拟机器人足球竞赛 二、本次活动所采用比赛系统
采用广州中鸣公司提供的AI-RCJ虚拟机器人足球系统作为比赛平台
2、单位时间:单位时间指机器人运行的最小时间单位,一个单位时间可以看 作一个机器人调度时钟周期或者一帧。或者简单的理解为AI-RCJ运行中机器 人动作一次。
3、比赛时间:是指一场比赛的总时间(单位时间)。如下图:
第六届NOC活动虚拟机器人足球竞赛
五、第六届NOC活动虚拟机器人足球竞赛 ——术语表
4、胜(赢)负(输)一场:进球数多的队算赢得此场比赛,进球数少的队算
9、总分计算
总分 = 分组循环赛得分×0.8 + 现场主题创作得分×0.2
10、角逐恩欧希教育信息化发明创新奖
经过前两个阶段竞赛后获得一等奖的参赛队伍有资格入围
第六届NOC活动虚拟机器人足球竞赛
四、如何学习虚拟机器人足球竞赛的编程?
即使你是一个毫无计算机程序设计经验的初学者,要学习虚拟机器 人足球竞赛的编程也并不难,但你至少需要一台供学习和练习用的电脑 并要懂得常用的WINDOWS系统的基本操作。
《足球机器人》课件

通讯系统
通讯系统用于实现机器人之间或机器人与人类 之间的通信,通过交换信息和命令来实现协同 工作和控制。
足球机器人中的关键技术
视觉导航技术
视觉导航技术使机器人能够通过摄像头或传感器获 取图像信息,并根据图像信息来导航和识别足球场 地、球员和球等。
运动控制技术
运动控制技术使机器人能够灵活地控制身体和关节 的运动,从而实现精确的击球、踢球和移动动作。
感知技术
感知技术使机器人能够感知周围环境的变化,如其
协同控制技术
协同控制技术使多个机器人能够合作踢球和进行战
足球机器人的应用
1
研究领域
2
足球机器人可用于研究人工智能、机器
学习、群体智能等领域,提供实验平台
战略布局
足球机器人技术的发展和应用将需要政府、学校、研究机构和企业的共同努力和战略布局。
机遇与挑战
足球机器人市场前景广阔,但同时也面临着技术挑战、法律法规限制以及人工智能伦理等问 题。
结论
足球机器人的发展具有重要的价值,不仅可以推动机器人技术的发展,还可 以促进人工智能、自动化和智能制造的应用。
足球机器人具有广阔的前景,在教育、研究和工业领域将发挥重要作用,带 来更多的机遇和挑战。
足球机器人的基础技术
机器人的构成和组成Байду номын сангаас
足球机器人由机械结构、电子元件和软件系统 组成,其中机械结构决定了机器人的动作能力, 电子元件负责控制和传感器系统,软件系统则 负责控制机器人的行为。
传感器系统
传感器系统用于获取环境信息,以帮助机器人 感知和理解周围环境,这对于足球机器人来说 至关重要。
机器人足球项目PPT课件(36页)

进攻机器人设计思路-绕球法(双头进攻效率更高)
攻
攻
C
A
B
绕
绕
进攻机器人设计思路-绕球法(适合初、高中)
在足球项目中,进球数多于被攻进球数时为获胜方
策略二:绕球法,由指南针来区分方向,如果是对着对方球门,直接 进攻,如果是对着自己球门,开始绕球 绕球:通过时间或者传感器来实现机器人从球的一边绕到另外一边, 目的是使指南针调整到对着对方球门
机器人足球项目规则解读
规则解析 坠球
由裁判员将足球放在距原在位置最近的坠 球点上,双方机器人可摆放在距足球15cm 以外的任意地方;裁判吹哨后,开始继续 比赛。在摆放机器人位置时,各队在自己 半场具有优先摆放权。
机器人足球项目规则解读
规则解析 任意球
获得任意球的一方可以在球附近(2-5cm)放 置一个机器人,其他参赛机器人应放置在 离球25cm以外。 由裁判员将足球放在发生犯规的地方,如 果犯规地点距墙壁小于15cm,则将球放在 距墙壁15cm处。 防守违例、出界球、点球未中时,判对方 在最近的坠球点罚任意球。 裁判鸣哨后,继续开始比赛。开任意球的 机器人触球后,其他机器人方可触球。
探索创新 展示成果
第十一届全国中小学电脑制作 活动竞赛类培训
(机器人足球项目)
培训人: 时 间:2010.3.6
规则讲解
(1)小学组 1对1比赛 (2)初中组 2对2比赛 (3)高中组 2对2比赛
比赛场地介绍
比赛场地
场地(内侧):长240cm,宽160cm, 高18cm 球场铺有一张绿色胶毯(压延垫卷材,材料:PVC,钻石纹),尽量保持平整 和水平。
机器人足球项目规则解读
规则解析 球的运动
比赛机器人不能“占据”球、不能“持球”, 即:机器人不能通过堵死球的移动方向来完全 控制球。例如:将球固定在机器人身上,或使 用机器人身体将球包围,阻止其他机器人触球。 任何时候球都必须是可见的着地运动,它不能 被压在机器人底下;不允许使用包围夹子或圆 圈,其他机器人必须能触到球。裁判员一旦发 现“持球”或“占据”球,将立即取消参赛队 的比赛资格。
足球机器人培训之CPPT.

一看,二闻,三摸摸,颜色不对,气味不正,出现霉点,食物软化,立刻丢掉不为错。
板书:其课间存储空间可被若干变量多次覆盖使用。 教育:你对应聘者所受教育水平的要求多高?肄业者是否可以考虑?是否需要研究生学历?
学C++,可以对计算机基础知识有更深的理解, 可以增强软件开发基本训练。重在实践,对很 多现象要知其所以然。从这个意义上说,C++ 是软件开发人员的“思维体操”。
参考书籍
C++编程环境的建立
Windows平台下C++的集成开发环境: Microsoft Visual C++ Borland C++ Builder
- int v1[4] = { 1, 2, 3, 4 };
- char v2[] = { 'a', 'b', 'c', '\0' };
- char v3[2] = { 'a', 'b', '\0' };
//error
- char v4[3] = { 'a', 'b', '\0' };
//ok
- int v5[2] [3] = {{ 1, 2, 3},{4,5,6} };
Linux下可以采用命令行开发C++程序 vi 编辑源文件 gcc 编译源文件 kdevelop 等IDE
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
C++语言简介
C++: C++之父--- 贝尔实验室
Bjarne Stroustrup
C++是更好的C
C++语言简介
一、C++与C的关系 1、C++与C保持兼容 C++文件的后缀为.CPP 2、C++对C语言作了一些扩充和改进 3、C++增加了面向对象的机制
怎样学好程序设计语言
数组
数组元素的调用 数组名[下标1][下标2]…
e.g. #ingculde <iostream.h> Void main() { int a[10],b[10];
int iቤተ መጻሕፍቲ ባይዱ for (i=0;i<10;i++)
{a[i]=i*2-1; b[10-i-1]=a[i]; } for (i=1;i<10;i++) {cout<<“a[“<<i<<“]”<<a[i]; cout<<“b[“<<i<<“]”<<b[i]<<endl; } }
基本数据 类型
数据类型
布尔型 (bool) true or false
字符型 (char) signed/unsigned
整型 (int)
short, long/signed, unsigned
实数型(float)
float, double, long double
自定义类型 typedef
常量
由用户自定义
常量类型: 整形常量,实型常量,字符常量, 字符串常量,布尔常量
• 声明:
const T <标识符> = <值>;
• 用法: - 必须初始化; -在定义后不能再改变其值
变量
变量在使用之前需要首先声明其类型和名称
声明:数据类型 变量名1,变量名2,…,变量名n 在声明一个变量时可以给它赋初值
变量的存储类型: Auto:采用堆栈方式分配内存空间,属于暂时性存储,
其存储空间可被若干变量多次覆盖使用。 Register:存放在通用寄存器中。 Extern:在所有程序和程序段中都可以引用。 Static:在内存中是以固定地址存放的,在整个程序运
行期间都有效。
枚举类型
• 将变量列举出来就构成了枚举类型
程序=数据结构+算法 掌握语法:基本概念要清晰,基本语法
要熟练 掌握数据结构:把握如何将现实生活中
的事物抽象为程序中数据结构的方法 掌握算法:学会如何规划计算机的工作
方式与顺序的方法 掌握编程思想:用计算机的思维方式去
思维
学习C++
C++是语法最复杂,功能最灵活的程序设计语 言
学习C++,一方面要注意C++与C在语法上的不 同点,更重要的是能从面向过程式的思维方式 转向面向对象的思维方式。
BREAK==6
数组
• 数组是具有一定顺序关系的若干对象的集合体,
组成数组的对象称为该数组的元素
• 声明:数据类型 标识符[常量表达式1][常量表达式2]… • 数组名是一个常量,代表着数组在内存中的起始地址
• 常量表达式中数据类型必须是unsigned int • 初始化:
- int v1[4] = { 1, 2, 3, 4 };
Linux下可以采用命令行开发C++程序 vi 编辑源文件 gcc 编译源文件 kdevelop 等IDE
C++语言简介
二、C++程序的构成 /* C++程序示例 */
#include<iostream> //系统头文件 using namespace std;
int main() { int a,b,result; cout<<"Enter two integer:"; cin>>a>>b; result=a+b; cout<<"\n The sum of"<<a<<"+"<<b<<"=" <<result<<endl; }
指针
• 指针是用于存放内存单元地址的数据类型
• 声明:数据类型 *标识符
char c1 = 'a'; char* p = &c1; char c2 = *p;
...
内存 地址 c1 a 1000H
p 1000H 3000H c2 a
在上例中:
P为指针变量,指向内存地址 *p为指针所指向的内容,该内存单元中的数据 &c1为取出为变量c1分配的地址
- char v2[] = { 'a', 'b', 'c', '\0' };
- char v3[2] = { 'a', 'b', '\0' };
//error
- char v4[3] = { 'a', 'b', '\0' };
//ok
- int v5[2] [3] = {{ 1, 2, 3},{4,5,6} };
结构体
• 结构体是由不同的数据类型组成的整体. 是类的 简单形式。
• 结构体声明
Struct student { int num;
char name[20]; char sex; int age; char score; char addr[30] }
//学生信息结构体 //学号 //姓名,字符型数组 //性别 //年龄 //成绩 //住址
• 定义: enum <枚举类型名> {<变量值列表>};
e.g.- enum keyword { ASM, AUTO, BREAK };
• 枚举类型有默认值,它们依次为: 0,1,2,……; - ASM==0, AUTO==1, BREAK==2;
• 也可以在申明时另行制定枚举元素的值,如.
- ASM==1, AUTO==5;
C++语法
字符集
• 英文字母: a~z,A~Z • 数字: 0~9
• 特殊字符:
blank ! # % ^ & * _ +=- ~<> / \ , " ; . ' () []
C++语法
词法记号
• 关键字: class, new, virtual, inline,bool, • 标识符: hello, __t, v1,m_result • 操作符: +,-,*,/,… • 文字: 数据,字符串,字符,布尔文字 • 分隔符: "()", "{}", ",", ":", ";"
学C++,可以对计算机基础知识有更深的理解, 可以增强软件开发基本训练。重在实践,对很 多现象要知其所以然。从这个意义上说,C++ 是软件开发人员的“思维体操”。
参考书籍
C++编程环境的建立
Windows平台下C++的集成开发环境: Microsoft Visual C++ Borland C++ Builder