智能分拣机器人系统设计的流程原理图
项目二任务自动分拣系统PLC程序设计及运行概要PPT课件

第9页/共11页
小结
1.程序编写注意不要超出PLC的扫描周期; 2.编程时双电控电磁阀线圈信号不能同时为“1”; 3.编写子程序; 4.下载电缆要断电连接。
第4页/共11页
项目设计
一、分拣单元控制要求
如果工件组合外壳为金属件,则该工件组合到达1号滑槽中间, 传送带停止,工件组合被推到1号槽中;如果工件组合芯体为白色 芯塑料,则该工件组合到达2号滑槽中间,传送带停止,工件组合 被推到2号槽中;如果工件组合芯体为黑色芯,则该工件组合到达3 号滑槽中间,传送带停止,工件组合被推到3号槽中。工件组合被 推出滑槽后,该工作站的一个工作周期结束。仅当工件被推出滑槽 后,才能再次向传送带下料。如果在运行期间按下停止按钮,该工 作站在本工作周期结束后停止运行。
第1页/共11页
项目构思
二、自动分拣单元的动作过程
本站的功能是完成从装配站送来的装配好的工件进行分拣。当输送站送来工 件放到传送带上并为入料口漫射式光电传感器检测到时,将信号传输给PLC,通 过PLC的程序启动变频器,电机运转驱动传送带工作,把工件带进分拣区,如果 进入分拣区工件为金属,则检测金属物料的接近开关动作,作为1号槽推料气缸 启动信号,将金属料推到1号槽里;如果进入分拣区工件为白色,则检测白色物 料的光纤传感器动作,作为2号槽推料气缸启动信号,将白色料推到2号槽里;如 果进入分拣区工件为黑色,检测黑色的光纤传感器作为3号槽推料气缸启动信号, 将黑色料推到3号槽里。自动生产线的加工结束。
快递分拣机器人控制系统的设计

在地面的快递件进行自动分拣。通过制作样机验证了设计的合理性与可行性。
关键词:
分拣机器人控制系统设计
中图分类号:TH122
文献标志码:A 文章编号:1000 -4998(2020)01 -0013 -04
Abstract: In order to improve the eliciency of express sorting, a controO system of express sorting robot
technology. The STM32 single-chip microcomputer is used as the motion controO core, and the externaO sensor
senses the state of the robot. Based on the two- way communication between the seial port and the machine
电池电压变化范围为21. 6〜25.2 V。当电压低于
21.6 V时,需要充电。逻辑电路包括三部分:
视觉
模块、
6 感器。采用5 V直流电供电,则降压
稳压电路的输入电压为21.6〜25 V,输出电压为5 V&
考虑到要
视觉模块、
及 感器供电,供电
电路采用LM2596稳压芯片⑺,最大输出电流可达3
A,能 满足逻辑电路的丄作要求。逻辑电路的电源
@
大赛平台,已制作出
,运行效果
良好&
2
快递分拣机器人控制系统硬件组成如图1所示, 以STM32单片机为核心,通过接口电路连接机器视觉
模块%舵 、电机驱动模块、传感器模块和气泵吸盘控
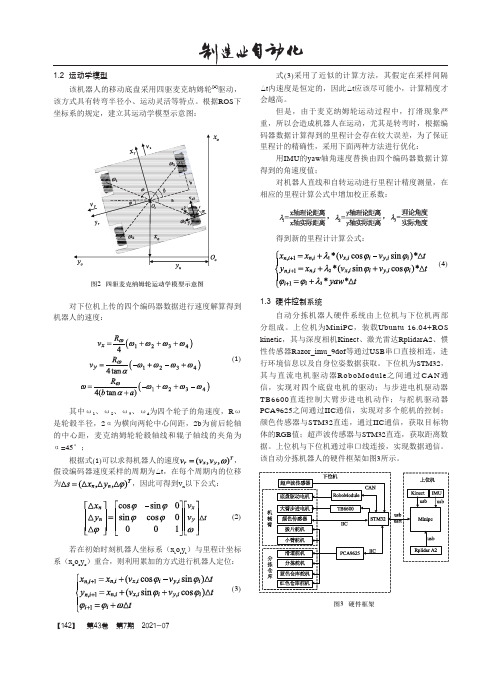
基于ROS的自动分拣机器人系统设计
感知
Rplidar A2
KinectWA
SLAM
Odom
Amcl
上
位
机
传感器 IMU
编码器
定位
任务 目标地设置
工作完成标志位
控制 机器人速度 四轮PID控制
IMU 超声波
姿态
传感器
矫正
目标点标志位
图6 上位机导航控制系统控制框架
下
STM32 位 机
第43卷 第7期 2021-07 【143】
采用双层玻纤板结构,两层玻纤板靠铜柱支撑,中间放 置电机驱动器、STM32控制板以及超声波传感器等元器 件,其中两个超声波位于底盘前端,两个超声波位于底 盘后端,固定板四周则由一圈较薄的玻纤板将其密封, 防尘的同时,保证美观。二自由度机械臂的大臂由步 进电机驱动,小臂由舵机驱动,小臂末端为舵机驱动的 拨片,拨片上安有颜色传感器,对目标物体进行颜色识 别。自动分拣仓库由滑道,分拣挡板、分拣通道组成, 分拣挡板会根据颜色传感器的颜色反馈进行摆动,将目 标颜色的球体分别放置于不同仓库中。另外,机器人的 前端放置有深度相机Kinect,分拣仓库上端安装有激光 雷达Rplidar,机械臂侧面为MinpiPC。图1为该机器人的 结构示意图。
DWA算法是在速度( )空间中采样多组速度, 并模拟机器人在这些速度下一定时间(sin_period)内 的轨迹[8,9],即:
L1 = vel * sim _ period
(5)
sim_period越长,速度越大,规划出的路径越长, 越能更早的避开障碍物,但是路径末端端点偏离全局路 径的方位差越大。当算法对局部路径与全局路径进行贴 合程度打分时,会以局部路径的末端端点为参考,如果
2.2 上位机导航控制系统设计
毕业设计(论文)-基于机器人货物分拣系统设计[管理资料]
![毕业设计(论文)-基于机器人货物分拣系统设计[管理资料]](https://img.taocdn.com/s3/m/8d4cc7bffe4733687f21aa46.png)
安徽工商职业学院应用工程学院毕业设计题目:基于机器人货物分拣系统设计系别:应用工程学院专业:机电一体化班级:15机电2班姓名:学号:指导教师:日期:目录摘要 (4)第1章引言 (4)、现状及应用 (4) (5) (6) (7)第2章基于机器人货物分拣系统设计 (7) (7) (7) (8) (8) (9) (9) (9) (9) (10) (11) (11) (11) (12) (12)第3章设备的控制系统程序编写 (12) (12)TIA Portal软件的使用 (13),插入并组态PLC (13) (14) (15) (15) (16) (18) (20)X_SIGHT软件程序的编写 (20) (22) (23) (23) (27)第4章触摸屏设计 (29)第5章总结 (31) (31) (31) (31)摘要当代科学技术发展的特点之一就是机械技术,电子技术和信息技术的结合,机器人就是这种结合的产物之一。
现代机器人都是由机械发展而来。
与传统的机器的区别在于,机器人有计算机控制系统,因而有一定的智能,人类可以编制动作程序,使它们完成各种不同的动作。
随着计算机技术和智能技术的发展,极大地促进了机器人研究水平的提高。
现在机器人已成为一个庞大的家族,科学家们为了满足不同用途和不同环境下作业的需要,把机器人设计成不同的结构和外形,以便让他们在特殊条件下出色地完成任务。
机器人成了人类最忠实可靠的朋友,在生产建设和科研工作中发挥着越来越大的作用。
搬运机器人不但能够代替人的某些功能,有时还能超过人的体力能力。
可以24小时甚至更长时间连续重复运转,还可以承受各种恶劣环境。
当机器人一点与其他传感器结合到一起后,它也不再是简简单单的机器设备了,比如与视觉搭配起来过后它就能实现和人一样的分辨物体、、、、、、、为了避免危险恶劣的工作环境导致的工伤事故和职业病,保护工人的身心安全,对一些特殊工种,工作量大、环境恶劣、危险性高、人类无法涉足的工作领域都可由工业机器人代替。
图书智能分拣机器人的应用设计
图书智能分拣机器人的应用设计摘要:图书分拣机器人大多数只是负责书本的运输和归类,无法实现整理与排放。
图书智能分拣机器人实现了图书快速整理归位,其工作原理为:图像识别模块扫描图书的电子标签,识别出图书种类,通过无线传输模块传输给中控,控制机械臂完成图书的抓取动作,并规划智能机器人的行进路径,机器人在行进过程中通过红外线扫描路径标识,并利用超声波测距进行避障,最后将图书放入书架的指定位置,实现图书馆还书归位的智能化处理。
关键词:智能化;数据化;图像识别;机械臂控制系统0 引言舒适的阅读环境、丰富的馆藏文献、便捷的借阅条件极大地刺激着读者的阅读需求,近些年许多图书馆的借阅量和还书量屡创新高,同时给图书馆管理带来了极大挑战,而架位管理的基础就是图书分拣。
目前国内图书馆大多依靠人工完成,分拣任务繁重且含金量不高、时效性差,无法满足图书快速流转的需求,从而在日益增长的借阅需求与图书馆设施之间产生新的矛盾。
为了缓解这种矛盾,图书馆开始探索智能机器人分拣技术,以此来解决图书快速分拣与缩短流转时效的难题。
1 图书智能分拣机器人的内涵图书智能分拣机器人是及收集、分拣和运送于一体的精准化机器,图像识别模块扫描图书的电子二维码标签,并将信息传输至中控单片机进行分析,识别出图书种类与书架位置,然后通过无线传输模块传给控制单片机,控制机械臂完成图书的抓取动作,并规划分拣机器人的行进路径,发送行进指令,分拣机器人在行进过程中通过超声波扫描路径成像和测距进行避障,将图书放入书架的指定位置,最后原路返回。
图书智能分拣机器人运行过程如图1所示。
图1 图书智能分拣机器人的运行流程2 图书分拣机器人的功能模块2.1 图像采集模块2.1.1 图像识别功能图像识别模块包括图像处理[[1]]装置和二维码识别装置。
二维码识别装置用于接收所述图像识别[[2]]模块采集的书本信息以及所述第一标识号,确定所述书本信息中的关键字符。
通过传感器,识别书本的形状、颜色、大小等特征,传输给单片机控制系统,系统利用普适性极高的二维码识别技术,利用扫描技术和PC技术[[3]]组合形成的电子识别技术,具有识别快、成本低、存储量大等特点。
自动分拣系统课程PPT

LOGO
新型智能输送装置
LOGO
新型智能输送装置
万向传送 由垂直的两个直 齿轮组成,两个 直齿轮分别由蜗 轮蜗杆驱动,两 个蜗杆分别有两 个电机单独驱动, 可以无极调节各 蜗杆的转速。
掀起面板看个清楚
再取出其中一个小单元
LOGO
新型智能输送装置
水平移动时,只需要开启水平 蜗杆电机,驱动水平侧的直齿 轮转动即可
LOGO
分拣系统的特点
缺点
1、一次性投资巨大,先期投入回收慢。 系统的设备复杂,投资和运营成本相当高,需要可靠的货源作保证,也许只有大型生产企业 或专业物流公司才有能力投资,小企业则无能为力。 2、系统对商品外包装要求高。 为使大部分商品都能用机械进行自动分拣,需要采取诸如推行标准化包装、根据分拣商品统 一的包装特性定制分拣机等二次措施。但要让所有商品的供应商都执行国家的包装标准是很困难 的,定制分拣机又会使硬件成本上升,且越是特别的通用性就越差。
分拣系统的输送装置
其主要作用是使待分拣货物通过控制装置和分拣装置。在输送 装置的两侧,一般要连接若干分拣道口,使分好类的货物滑下主输 送机,以便进行后续作业。
LOGO
系统的分拣道口
主要作用是使待分拣货物通过控制装置和分拣装置。在输送 装置的两侧,一般要连接若干分拣道口,使分好类的货物滑下主 输送机,以便进行后续作业。
同理,竖直移动
举一反三,斜向移动 时,同时控制好直齿 轮转速,即可实现。
LOGO
新型智能输送装置效果图
LOGO
4.分拣系统的分类
LOGO
分拣系统的分类
LOGO
5.分拣系统的应用
建立一个先进的、自动
化的分拣系统,对配送中心 来说是至关重要的,不仅可 大大提高工作效率、而且可 以显著降低工人的劳动强度。 该系统目前已经成为发达国 家大中型物流中心不可缺少
基于AI技术的智能分拣系统设计

基于AI技术的智能分拣系统设计随着物流业务的不断发展和扩张,快递分拣成为了一个极具挑战的领域。
因此,各运营商都致力于提高分拣的效率和准确性。
在这个领域中,人工分拣已经开始转变为自动化智能分拣。
而这一转变得益于AI技术的运用。
AI技术在智能分拣领域的运用,与生产线自动化有着类似的原理,即设备根据预设参数、系统反馈的数据,自动完成操作。
智能分拣系统主要由物料传输设备、扫描设备、智能算法、机械臂等组成。
整体系统流程大致如下:一、物料传输设备:将需要分拣的物料送至下一个设备。
常见的物料传输设备有传送带、滚筒等。
物料传输设备应当拥有良好的传送能力,物料送至下一个设备的过程中应不产生堵塞情况。
二、扫描设备:主要用来扫描物料的标签或二维码,获取运单等信息。
这些信息将用来判断物料的去向。
当前,扫描设备常见的有激光扫描和CCD线扫描两种技术。
相比之下,CCD线扫描技术成本低、性能稳定、易于集成。
三、智能算法:AI技术的运用使得智能算法得到了广泛的运用。
智能算法为系统提供了大量的数据,进行模型训练、建模和实时计算。
通常采用的有神经网络、卷积神经网络、决策树等技术。
智能算法的关键就在于如何预测物料的去向,从而进行正确的分拣处理。
四、机械臂:智能算法预测出物料的去向后,机械臂将完成相应的操作。
机械臂是智能分拣系统的关键。
它需要具备良好的机械结构和精准运动技术。
在挑选机械臂时,需要考虑到运动轨迹、负重能力、准确度等多方面因素。
综合上述几个方面的内容,一个智能分拣系统也就被完整设计出来了。
需要指出的是智能分拣系统的算法设计则是最具挑战性的组成部分。
系统的电子技术、机械设计等部分相对更容易实现。
因此,系统设计者需要对AI技术有长期而全面的认识,以适应未来物流领域快速发展的需求。
总的来说,AI技术不断探索,不断突破,取得了许多卓越的成果,其中应用于智能分拣系统,准确的提高了分拣效率,保证了快递的快速和准确的投递,极大的减少了人力资本,也是物流发展中的重要步伐。
物流分拣机器人原理

物流分拣机器人原理
物流分拣机器人是一种用于自动化分拣、搬运和运输货物的机器人系统。
其原理是基于视觉识别技术、路径规划算法和机器人控制系统的结合。
首先,物流分拣机器人通过搭载视觉传感器或相机来获取货物的图像信息。
这些传感器能够准确地识别商品的特征和位置,例如条形码、二维码或货物特定的标识。
通过图像处理和模式识别算法,机器人能够自动识别和分类不同的货物。
然后,机器人利用路径规划算法来确定最优的路径,以便在仓库或物流中心内高效地移动。
这些算法通常会综合考虑货物的优先级、路径的长度、障碍物的位置和其他实时信息,以确保机器人能够以最短的时间完成任务。
在移动过程中,物流分拣机器人还可以与其他设备或系统进行实时通信,例如与货架机械臂、搬运车或仓库管理系统进行数据交互。
这种通信能够使机器人在执行任务时更加智能化和协调化,以及自动调整和优化操作。
最后,物流分拣机器人利用机器人控制系统实时控制机器人的运动和操作。
这个系统通常会包括机器人的运动控制器、电源管理和安全监测装置。
这样,机器人就能够安全、可靠地执行分拣和搬运任务,同时保护自身和周围的环境。
综上所述,物流分拣机器人的原理是通过视觉识别技术、路径规划算法和机器人控制系统的结合,实现对货物的识别、分类
和自动化搬运。
这种机器人系统在物流行业中广泛应用,可以提高分拣效率、降低运营成本,并增强整体的物流管理能力。
毕业设计自动分拣控制系统论文设计

word毕业设计〔论文〕题目PLC编程在流水线生产中自动分拣控制系统中的运用研究学生吴佳鹏学号2015309435专业发电厂与电力系统班级20153094指导教师爽爽评阅教师爽爽完成日期2017年9月25日三峡电力职业学院毕业设计〔论文〕课题任务书〔2017-2018学年〕目录摘要- 1 -前言- 2 -1、PLC的开展与定义- 2 -- 2 -- 3 -- 3 -2、PLC的特点与应用- 4 -2.1 PLC的特点- 4 -- 5 -- 5 -3、PLC的结构与编程语言- 5 -3.1 PLC的硬件结构- 5 -3.2 PLC的等效电路- 5 -3.3 PLC常见的编程语言- 6 -4、自动分拣控制的要求与流程- 6 -- 6 -- 6 -- 7 -- 7 -5、I/O分配表- 7 -6、梯形图- 8 -7、指令表- 11 -致- 12 -附录一- 13 -参考文献- 15 -PLC编程在流水线生产中自动分拣控制的运用研究---PLC编程在升降机控制运用学生:吴佳鹏指导教师:爽爽教师〔三峡电力职业学院〕摘要:为降低物流行业中自动分拣系统的能耗,以与实现分拣系统准确的位移控制,将PLC 技术应用到分拣系统中。
在对自动分拣系统的模型机进展功能分解的根底上,采用PLC 并结合变频器,实现了对自动分拣系统包括上料、皮带输送、机械手搬运和分类仓更大大降低了能耗;同时,能储等功能的自动控制。
研究结果明确:使用PLC 带动变频器不仅能方便地控制分拣系统电机的启停,够准确控制机械手动作时间和步进电机传动产生的位移。
关键词:PLC ;自动分拣系统;自动控制;变频器中图分类号:TP278;TH39 Abstract:in order to reduce the energy consumption of the automatic sorting system in the logistics industry and realize the accurate displacement control of the sorting system, the PLC technology is applied to the sorting system. Based on functional deposition in the model machine of automatic sorting system, the bination of PLC and frequency converter, the realization of automatic sorting system includes feeding, belt conveyor, manipulator handling and sorting bin also greatly reduce the energy consumption; at the same time, can automatically control the storage function. The results show that using PLC to drive the inverter can not only conveniently control the start and stop of the motor of the sorting system, but also control the movement time of the manipulator and the displacement generated by the stepper motor accurately.Key words:PLC; automatic sorting system; automatic control; frequency converter classification number: TP278; TH39前言——随着社会对物流服务的需求日益增长,分拣作为物流作业中的一个重要环节越来越受到人们的重视。
工业机器人典型应用—分拣站—分拣编程

工业机器人分拣站集成
项目五 分拣编程
目录
分拣工艺 程序结构
分拣指令 解析
分拣工作站 程序编写
第一部分
分拣工艺程序结构
1 分拣工艺程序结构
1. 分拣程序结构
本分拣站的分拣程序结构如图所 示,主体程序结构由主程序、通讯 程序、输送器程序、分拣子程序及 分拣后处理程序组成。
Hale Waihona Puke 1 分拣工艺程序结构通讯子程序
第二部分
分拣指令解析
2 输送器指令
概述
KUKA 机 器 人 Conveyor 分 拣 工 艺 包 提 供 了 五 条 基 本 的 分 拣 指 令 , 分 别 是 CONVEYOR.INI_OFF ( 初 始 化 输 送 器 ) 、 CONVEYOR.ON ( 激 活 AMI ) 、 CONVEYOR.FOLLOW(跟踪工件范围)、CONVEYOR.SKIP(监控(接纳)工件)、 CONVEYOR.QUIT(退出输送器)。
2 输送器指令
跟踪指令
参数序号 ⑤ ⑥ ⑦
参数含义 逻辑电平 TRUE FALSE 如果在已配置的数字输入端(位置3)上出现输入的值,则中断指令的执行 旗标的编号 可中断指令执行的旗标。 逻辑电平 TRUE FALSE 如果在已配置的旗标(位置6)上出现输入的值,则中断指令的执行。
分拣机器人工作原理
分拣机器人工作原理分拣机器人是一种能够自动进行物品分类和分拣的智能设备,它在现代物流行业中发挥着越来越重要的作用。
分拣机器人能够快速、准确地完成大量货物的分类和分拣工作,极大地提高了物流效率和准确性。
那么,分拣机器人是如何工作的呢?下面我们就来详细介绍一下分拣机器人的工作原理。
首先,分拣机器人通过激光或摄像头等传感器设备对货物进行扫描和识别。
当货物进入分拣机器人的工作区域时,传感器会立即对货物进行扫描,获取货物的相关信息,如尺寸、重量、形状等。
通过这些信息,分拣机器人能够准确地识别货物的种类和属性。
接下来,分拣机器人会根据预先设定的分拣规则和算法对货物进行分类。
在货物被识别后,分拣机器人会根据预先设定的分拣规则,将货物分类放置到相应的货位或容器中。
这些分拣规则和算法可以根据实际需求进行调整和优化,以确保分拣机器人能够快速、准确地完成分拣任务。
除此之外,分拣机器人通常配备有机械臂或夹爪装置,用于抓取和移动货物。
一旦货物被正确分类,分拣机器人会利用机械臂或夹爪装置将货物移动到相应的位置。
这些机械臂和夹爪装置能够根据不同的货物特性进行灵活调整,确保货物能够被准确、稳定地移动和放置。
此外,分拣机器人还配备有自动导航系统,能够自主规划最优路径和避开障碍物。
在进行分拣任务时,分拣机器人会通过自动导航系统规划最短、最快的分拣路径,以提高分拣效率。
同时,自动导航系统还能够及时发现并避开工作区域中的障碍物,确保分拣过程的安全和稳定。
总的来说,分拣机器人的工作原理主要包括传感器识别、分拣规则分类、机械臂移动和自动导航等环节。
通过这些环节的协同作用,分拣机器人能够快速、准确地完成物品的分类和分拣工作,为现代物流行业的发展提供了重要支持。
随着人工智能和机器人技术的不断进步,分拣机器人的应用范围和效率将会进一步提升,为物流行业带来更多的便利和效益。
以上就是关于分拣机器人工作原理的介绍,希望能够对大家有所帮助。
分拣机器人作为现代物流行业的重要装备,其工作原理的了解对于提高物流效率和准确性具有重要意义。
智能快递分拣系统设计

智能快递分拣系统设计随着电子商务的快速发展,快递业务也变得日益繁忙。
为了提高快递分拣的效率和准确性,智能快递分拣系统应运而生。
该系统利用先进的技术和智能算法,能够实现快递分拣的自动化和智能化,大大提高了快递行业的效率和服务质量。
本文将详细介绍智能快递分拣系统的设计原理和关键技术。
一、系统整体架构智能快递分拣系统由物流仓储区、传送设备、识别装置、控制系统和数据管理系统组成。
物流仓储区是存放快递包裹的地方,传送设备主要包括输送线、滚筒等,用于将包裹从仓储区输送到分拣区。
识别装置则是利用图像识别、RFID技术或者激光扫描等方式,对包裹进行识别和分类。
控制系统则是负责协调各个部件的工作,实现系统的自动化运行。
数据管理系统则是用于管理包裹信息、路由信息等数据,为系统提供支持。
二、识别装置的设计快递分拣系统的核心是识别装置,其准确性和稳定性对于整个系统的运行至关重要。
目前主流的识别装置有图像识别系统和RFID技术。
图像识别系统利用摄像头和图像处理算法,对包裹进行拍照并进行识别和分类。
这种方式成本较低,易于实现,但受到光线、角度等因素的影响,容易出现识别错误。
而RFID技术则是将RFID芯片嵌入包裹中,通过读卡器对芯片进行读取,实现包裹的快速识别和分类。
这种方式准确率较高,但需要大量的RFID标签和读卡器,成本较高。
在实际应用中,可以根据需求进行选择,也可以采用两种方式的结合,提高识别装置的准确性和稳定性。
三、控制系统的设计控制系统是智能快递分拣系统的大脑,其设计优劣将直接影响系统的稳定性和效率。
控制系统应具有自动化、智能化和灵活性的特点,能够实现包裹的自动分类、路由和投递。
控制系统还应具有故障自诊断和自修复的功能,能够及时发现和处理系统故障,确保系统的持续稳定运行。
控制系统还应具有良好的人机交互界面,方便操作人员进行监控和管理。
在控制系统的设计中,可以采用工业控制系统的成熟技术,也可以引入人工智能和大数据技术,以提高系统的智能化和自适应性。
物流自动化技术——自动分拣系统ppt课件

自动分拣系统的组成
自动分拣系统普通由识别安装、控制安装、分类安装 、保送安装和分拣道口组成。
识别安装经过条形码扫描、色码扫描、分量检测、语音 识别、高度检测及外形识别等方式,利用LAN、总线 技术或RF技术将分拣要求传给分拣控制安装。
控制安装的作用是识别、接纳和处置分拣信号,根据信 号指示分类安装和保送安装进展相应的作业。
货机上保送带运转,按计算机预先设定的指令,在 与分支机构联接处自动翻开出口,使货物进入分支 机构,分支机构的终点是用户集货单位 • 回转货架分货
•
大量出货时拣货方式效率比较表
摘果式 品类 每项数量
时间 误差%
播种式 时间 误差%
多
100 3.2
65
1.1
多
少
100 1.5
85
0.4
多
100 2.3
(二)机器人分拣系统与配备
与自动分拣机分拣相比,机器 人分拣具有很高的柔性。
(三)自动分拣系统
当供应商或货主通知配送中心按订单 发货时,自动分拣系统在最短的时间内 可从庞大的存储系统中准确找到要出库 的商品所在的位置,并按所需数量、种 类、规格出库。自动分拣系统普通由识 别安装、控制安装、分类安装、保送安 装组成,需求自动存取系统(AS/RS) 支持。
• 高效率的按订单分拣作业能显著缩短订发货周期 ,不仅改善作业效率,而且提高顾客效力程度。
二、分拣根本方法
单一分拣:先按客户每张订货单进展分拣,再将订单汇总
批量分拣:先汇总多张订单分拣,再按不同的客户分货
两种方法的组合
三、人工分拣作业方法
分拣货架、集货点〔集货货架〕、分拣人员3种元素,1个或2个 元素静止不动,再和其它元素组合,共有6种不同的分拣方法 。
机器人智能分拣
上一页 下一页 返回
7.4 任 务 实 现
• 对应多功能工作站如图 7−10 所示,坐标系设定在放料区上,均以螺 丝孔位为参考,箭头所指方向为对应的坐标轴的正方向。
• 7.4.2 智能分拣项目目标点位示教
• 在本任务中,一共需示教 3 个点。其中,识别区 1、识别区 2 的正上 方各示教 1 个拍照点(需与视觉的原点保持一致)、放料区示教 1 个放置原点,如图 7−11 所示。上方准备点位均是以基准点位偏移出 来的。
出现的中断(含 EXIT功能)退出循环语句。 • 2. FOR 循环 • FOR 重复执行判断指令,根据指定的次数,重复执行对应的程序,
步幅默认为+1,也可通过关键词 STEP 指定为某个整数。
上一页 下一页 返回
7.3 知 识 准 备
• 3. WHILE 当型循环 • WHILE 循环是一种当型或者先判断型循环,这种循环执行的过程中
先判断条件是否成立,再执行循环中的指令。 • 4. REPEAT 直到型循环 • REPEAT 循环是一种直到型或者检验循环,这种循环会在第一次执
行完循环的指令部分后才会检测终止条件。 • 5. IF 条件分支 • IF 条件判断指令,就是根据不同的条件判断去执行不同的指令。 • 6. SWITCH 多分支 • SWITCH 多分支根据变量的判断结果,在指令块中跳到预定义的
• 基坐标系表示根据世界坐标系在机器人周围的某一个位置上创建的坐 标系,如图 7−6 所示。其目的是使机器人的运动以编程设定的位置 均以该坐标系为参照。因此,设定的工件支座和抽屉的边缘、货盘或 机器的边缘均可作为测量基准坐标系中合理的参考点。
• 基坐标系测量的方法有 3 点法、间接法、数字输入法三种,如表 7−2 所示。