雕刻机参数设置说明
雕刻机参数设置说明
另有一些参数由于用户通常不会波及到,所以系统界里中不列出,那样也预防了过于搀纯的参数系统使用户感触狐疑.之阳早格格创做脚动速度:包罗脚动下速速度战脚动矮速速度,那二个值用去统制用户正在“面动”模式下的疏通速度.●脚动矮速速度是指只按下脚动目标键时的疏通速度;●脚动下速速度是指共时按下“下速”键时的疏通速度.那二个值也不妨正在数控状态窗心中间接设定.拜睹4.6节.自动参数:●空程速度:G00 指令的疏通速度;●加工速度:G01、G02、G03等加工指令的插补速度.那二个值统制以自动办法疏通时的速度,如果自动模式下的加工步调、大概者MDI指令中不指定速度,便以那里设定的速度疏通.注意:删量办法的疏通速度是空程速度.那二个值也不妨正在数控状态窗心中间接设定.拜睹4.6节.●使用缺省速度:是可搁弃加工步调中指定的速度,使用上头树坐的系统缺省速度.●使用缺省转速:指示系统是可搁弃加工步调中指定的主轴转速,使用人为树坐的系统缺省转速.●速度自符合劣化:是可允许系统根据加工工件的对接个性,对付加工速度举止劣化.●IJK删量模式:圆心编程(IJK)是可为删量模式,某些后处理步调死成的圆弧编程使用的IJK值是删量值.关于那一面,请参照对付应的后处理步调证明.●使用Z背下刀速度:是可正在Z背笔曲背下疏通时,采与特定的速度降刀速度.●劣化Z背提刀速度:是可正在Z背笔曲进与疏通时,采与G00速度提刀.面).●空程(G00)指令使用牢固进给倍率100%:那个参数是一个选项.指示系统正在真止空程指令时,是可忽略进给被率的效率.那样当改变倍率时,不效率空程移动的速度.●久停大概者中断时,自动停止主轴(需要沉新开用):设定当一个加工步调中途久停大概加工中断后,是可自动停止主轴转化.●X轴镜像:设定X轴举止镜像.●Y轴镜像:设定Y轴举止镜像.换刀位参数:●使用换刀位:如果期视正在加工完成后自动回到某个位子,请采用该选项.其余换刀位参数惟有正在使用换刀位灵验时,才起效率.●换刀位板滞坐标X、Y、Z:树坐换刀位的板滞坐标(注意:不是工件坐标!).退刀面参数:退刀面:真止回工件本面、断面继承动做时,刀的上抬下度(相对付工件本面).文献输进参数:●二维PLT加工深度:设定载进PLT文献加工时的刀具深度.●抬刀下度:设定PLT文献加工时的抬起刀具的下度.●PLT单位每毫米:设定PLT单位值.●Z轴反背:设定是可开用Z轴反背功能.本系统默认为Z轴进与为正.转化轴参数:●Y轴是转化轴:如果Y轴是转化轴,采用该选项.其余转化轴参数惟有正在转化轴灵验时,才不妨树坐:●转化轴使用角度单位(度):如果回转体加工步调文献中转化轴以角度为单位,采用该项.●转化轴使用少度单位(毫米):如果回转体加工步调文献中转化轴以加工表面的少度为计量单位,采用该项.那时需要输进工件的回转半径.厂商参数用户普遍情况下交战不到“厂商参数”,所以不妨跳过本节.对付于不授权的一般用户,系统正在加进“厂商参数”之前也大概提示输出心令.那不过为了预防用户奇我建改了那些要害参数,而引导系统出现障碍.处事台路程空间:指处事台灵验加工范畴,那里使用的是板滞坐标,注意,普遍Z轴的板滞整面正在上头,所以,Z轴的灵验路程范畴普遍是小于整的.根据板滞限位开关的位子,决定本质的路程,对付呵护机床利害常有助闲的.正在合理天树坐了处事台路程空间后,如果机床疏通超出此范畴,则系统提示硬限位报警,那时间起效率的不是真正在的限位开关,而硬件根据目前板滞坐标战处事台路程空间相比较得出的截止,而不会制成果为碰打限位开关大概者硬限位大概戴去的益坏.注意:该值正在出厂时已经树坐佳,请勿专断建改!如果要建改,请留神丈量.对付刀块参数:●对付刀块薄度:请准确丈量对付刀块薄度挖进此处.注意:该值正在出厂普遍也已经树坐佳,请勿专断建改.●牢固对付刀块的板滞坐标:正在使用牢固对付刀块处事办法时,需要指定确定对付刀块的板滞坐标,请准确挖进此值,包管对付刀乐成.电机参数:●脉冲当量:是指疏通统制卡不妨处理的最小位移量,正在步进系统中,它普遍对付应着一个步进脉冲,再根据传动关系,把步进脉冲的角位移量转移为曲线量.●起跳速度:该参数对付应步进电机的起跳频次.加速度:系统使用二个加速度参数去决定疏通的加速本领:●单轴加速度:用以形貌单个进给轴的加减速本领;●直讲加速度:用以形貌多个进给轴联动时的加减速本领;告诫:该参数普遍正在出厂时已经安排佳.不妥当天树坐此参数会引起加工缺面,以至引导机床益坏.主轴参数那组参数用于统制主轴的止为.简曲的指标有二个:主轴最下转速战主轴开用(停止)时间.●主轴最下转速●当系统使用连绝转速统制办法时,最大的模拟输出量对付应的主轴转速.●主轴开用(停止)时间●正在步调开初战停止时,如果使用主轴自动开停功能,由于主轴开停需要一定的时间,需要加进一定的延时,此参数用于设定延常常间.脚摇脉冲爆收器新版本的Ncstudio收援脚摇脉冲爆收器.如果准备使用此项功能,请透彻树坐本组参数.本组参数有二个:收援脚摇脉冲爆收器战庄重脚摇脉冲爆收器记数.●收援脚摇脉冲爆收器:当准备使用脚摇脉冲爆收器,必须使该选项灵验.此时疏通统制卡的输进输出依照脚摇脉冲爆收器办法定义.●庄重脚摇脉冲爆收器记数:正在那种情况下,机床疏通的距离庄重对付应脚轮计数,然而是,正在脚轮转化太快的情况下,纵然脚轮停止,机床大概仍旧疏通较万古间.不使用本参数时,系统对付脚轮的转化有较快的响当令间,然而是,当转化太快时,大概制成机床疏通的距离与脚轮转化的距离不符.1.1步调编写窗心编写窗心的上端是被编写步调文献的文献名.底下是一个尺度的Windows风格编写窗心.该窗心的编写本领比Windows摆设的“附件”步调“记事本”的编写本领要大的多,从表里上道,该编写窗心不妨编写超出1000兆(也便是1凶,1G)字节大小的加工步调,进而谦脚了编写任性搀纯加工步调的央供.1.2输进输出状态(I/O状态)窗心输进输出(I/O)状态窗心隐现系统I/O的目前映像,那对付系统监视战障碍诊疗非常有助闲.注意:该窗心隐现的真质依据分歧的板卡树坐战分歧的用户需要有所分歧,那里给出的真质仅供参照.2Ncstudio™菜单系统2.1“文献”菜单正在“文献”菜单中包罗用于对付文献举止收配的下令选项.该下推菜单的前二项用于步调文献的“载进”战“卸出”.那里的载进战卸出功能与自动加工有关,是指步调文献拆载到数控步调阐明缓冲区,以及从其中卸载,载进后该步调隐现正在自动窗心中.中间的七个菜单项用于步调文献的编写.由编写功能挨开的文献隐现正在编写窗心中.请注意与“载进”战“卸出”功能的辨别.挨开并拆载“挨开并拆载”菜单项也可用快速键“CTRL+O”赶快真止.该菜单用于挨开已有的、存于磁盘上的加工步调文献,并将其拆载到系统的数控步调阐明缓冲区,那样系统数控步调阐明引擎便不妨对付缓冲区种的数据逐止阐明,并把爆收的加工指令传播到数控统制卡.那便是加工历程的真止.采用该菜单项弹出“挨开”对付话框,如图所示:用户不妨从中采用要挨开步调文献天圆的磁盘启动器、路径以及文献名.挨开加工步调后,用户不妨正在自动窗心中瞅到该步调.其余,挨开加工步调后,用户能注意到系统主窗心的题目栏爆收变更:已经挨开的加工步调名缀正在步调称呼之后;文献窗心隐现出目前挨开的文献真质;一些本去与自动加工有关的被克制的菜单项被使能,比圆:“收配”菜单的“开初”菜单项,那标明用户不妨举止自动加工收配.正在旧的Ncstudio™版本中,一朝加工步调载进系统,该文献便处于使用状态,那表示着其余步调不克不迭对付该文献举止建改(然而是不妨真止“读”收配),果此,用户若要建改该文献,必须正在Ncstudio™系统中关关该文献.那个节制正在新版本中得到基础矫正.新版本,也便是版本5.0以去的版本,将步调文献拆载到系统的数控步调阐明缓冲区后,以去的考察便鉴于该缓冲区,与本质文献摆脱,进而真止了正在加工步调文献载进系统中后,仍旧不妨对付文献举止建改,而此时的建改与正正在加工的文献无关;如果需要应用那些建改,不妨将步调文献沉新载进系统.从5.4.33版本开初,减少了对付粗雕加工文献(*.eng)的收援.卸载正在加工步调载进系统后,用户不妨采用关关功能,关关目前拆载到系统的数控步调阐明缓冲区的文献.注意:如果目前文献正正在加工,则不克不迭被关关.新建加工步调采用该功能,系统挨开一个编写窗心,供用户编写新建文献之用,正在编写齐历程用户不妨随时死存该文献.挨开并编写该功能挨开已有的、存于磁盘上的加工步调文献,并将其拆载到编写窗心.用户不妨正在编写窗心真止编写功能.编写目前加工步调该功能将目前已经正在数控步调阐明缓冲区中的步调文献载进编写窗心.该菜单项只正在目前已经有步调文献正在数控步调阐明缓冲区中时才灵验.死存该功能将目前正在编写窗心中的步调文献存进估计机.如果目前编写的是新文献,该功能会导进“另存为”对付话框.另存为该功能将目前正在编写窗心中的步调文献,改名存进估计机.真止该功能步调将弹出“另存为”对付话框,用户正在其中指定路径战文献名,采用“死存”按钮,则文献以新的文献名死存;采用“与消”按钮,则与消该死存动做.死存并拆载该功能是“死存”战“挨开并载进”的推拢.最先与死存功能一般,将目前正在编写窗心中的步调文献存进估计机.而后,将死存后的步调文献载进系统的数控步调阐明缓冲区.关关该菜单项关关目前正正在编写的步调文献.迩去拆载的加工步调该菜单项会挨开一个新的子菜单,子菜单隐现迩去曾拆载的加工步调名,用户如要再拆载那些文献不妨间接单打文献名,便不妨赶快拆载那些文献了.迩去编写的加工步调共上一个的菜单项类似.该菜单项会挨开一个新的子菜单,子菜单隐现迩去曾编写的加工步调名,用户如要再编写那些文献不妨间接单打文献名,便不妨赶快编写那些文献了.退出采用此选项,用户不妨关关Ncstudio™数控系统.此时如果用户有正正在编写的步调文献不死存,将弹出对付话框提示是可要死存文献,如需死存则面打“是”,如不需死存则面打“可”,如不要退出则面打“与消”.如果用户正正在自动加工,系统将提示用户先中断目前的加工任务,再退出系统.2.2“编写”菜单“编写”菜单中包罗用于编写窗心的菜单项,该菜单项会随着第二窗心区的目前活动窗心的分歧而分歧.那是果为那些窗心大概会包罗一些特定的编写功能.下图是系统参数窗心、I/O状态窗心战步调编写窗心激活时的编写菜单.此时的菜单项值包罗一些最基础的菜单项.下图是加工轨迹窗心激活时的编写菜单.下图是系统日志窗心激活时的编写菜单.2.3“查看”菜单“查看”菜单中包罗用于对付主窗心内隐现真质举止安排的下令选项.那些菜单项有些会随着主窗心的分歧而分歧.正在所多情况下皆有的菜单项如上图所示.工具栏如果工具栏已挨开,则采用“工具栏” 菜单项将关关工具栏.如果工具栏已关关,则采用“工具栏” 菜单项将挨开工具栏.状态栏如果“状态栏”已挨开,则采用状态栏选项将关关状态栏.如果状态栏已关关,则采用“状态栏” 菜单项将挨开状态栏.齐屏齐屏菜单项用于挨开战回复“齐屏幕隐现模式”.正在“齐屏幕隐现模式”,硬件界里将夸大到所有屏幕,共时菜单战题目栏被隐躲.如图所示:注意:一朝加进齐屏模式,系统菜单无法用鼠标收配.此时只可使用快速键Ctrl+Enter退出齐屏模式.隐现加工步调止号该功能隐现大概隐躲加工步调窗心中的加工步调止号.该菜单项惟有正在加工步调窗心可睹时才灵验.追踪加工步调目前止该功能指示您是可正在加工步调窗心中追踪隐现目前加工止.当选中该功能时,正在自动加工历程中,加工步调窗心会自动上下滑动真质,进而使得目前加工止号末究可睹.关关该功能,加工步调窗心便不会自动上下滑动真质.加工步调疑息采用该下令,硬件将挨开一个“加工步调统计疑息”对付话框.如图所示:该对付话框隐现了正在自动加工历程中加工步调的统计疑息.如加工时间,加工范畴等.该功能共仿真运止功能分离,能赶快准确天相识加工步调的百般疑息.2.4“收配”菜单正在“收配”菜单中真止了对付机床的百般收配.然而是不包罗对付间接输出(M功能)进给倍率战主轴的统制,那些功能安插正在“机床”菜单.单段真止该菜单项使能战克制单步加工模式.一朝“单段真止” 灵验,则加工步调正在每真止一句,便加进久停模式,此时用户须采用“开初” 菜单项真止加工步调的下一句,一朝下一句真止完,系统又将加进久停模式.注意:正在速度自符合劣化模式灵验时,正在单步模式下,系统久停是处正在的刀具位子本去纷歧定透彻天处正在每个语句所指定的目标位子,果为此时系统为加工速度干了劣化.树坐目前面为工件本面采用“设目前面为工件本面” 菜单项,即把目前面天圆的工件坐标设为整,那本质上本去不引导本质的位子移动.树坐目前面工件坐标…该功能使得用户能便当天树坐目前面的工件坐标.通过采用该菜单项,不妨改变目前刀具天圆位子的坐标.采用该菜单项,系统弹出“树坐目前面工件坐标”对付话框,如图所示:正在X、Y、Z轴对付应的编写框中输进的符合的值,那么目前位子的坐标便改变了.注意:那历程中,机床板滞并不真止所有动做.本质上,系统通过建改工件本面的位子达到安排目前面坐目标脚法.回工件本面…工件本面便是工件坐目标本面,是为工件尺寸编程决定的本面,普遍是工件加工的起初面.工件本面可由编程者采用,它与板滞本面的关系由“树坐目前面工件本面”决定.采用“回工件本面…”选项,刀尖从目前位子以Z、X、Y的程序自动回到工件本面.提示:为了正在回工件本面历程中,刀尖能仄安天通过通过的空间,而不会果为逢到工件、夹具等障碍爆收事变,所以,回整路径举止如下劣化:如果末面Z目标坐标大于起面Z目标坐标,则Z轴先单独进给到Z轴末面位子,而后,X,Y轴联动,到达脚法面.如果末面Z目标坐标小于起面Z目标坐标,则X,Y轴先联动到达脚法面X,Y坐标,而后,z轴单独进给到z轴末面坐标.果为末面的Z坐标往往正在工件的加工表面,为了预防刀尖回到工件整面后碰伤工件表面大概刀尖,本质上,Z轴不是回到整,而正在整面上圆的一个偏偏置值.该值由“系统参数窗心”的加工参数中的“退刀面”设定.死存工件本面用户不妨死存一再使用的工件本面动做预设值,共可死存10组坐标数据.当用户第一次设定佳工件本面,以去还念要赶快定位到那个工件本面,那么便不妨使用者那个功能去死存佳那个工件本面坐标值.读与工件本面读与预设的工件本面坐标值,赶快回到读与的预设工件本面.读与工件本面后,使用“回工件本面”下令去回到预设的工件本面.开初那个菜单项包罗二个功能:第一:如果某个加工步调已经载进,而且目前系统状态为“空闲”,那么采用该菜单项,机床将自动天从加工步调第一句开初真止自动加工历程.一朝加工开初,系统加进“自动|运止”状态;如果系统处正在仿真状态,那时以仿真办法真止加工步调.第二:如果系统处正在“自动|久停”状态,那么采用该菜单项系统将从久停处继承真止自动加工历程,加进“自动|运止”状态.如果系统处正在仿真状态,那时以仿真办法真止加工步调.提示:系统有二条道路加进“久停”状态,第一条是系统目前处正在“单步加工”模式;第二条道路是正在加工历程中用户采用了“久停”功能.久停正在自动加工历程中,“久停”功能灵验.采用“久停”菜单项,机床将久停加工而且抬刀,而后加进“自动|久停”状态.此时如要继承真止加工步调只需采用“开初”菜单项.如果系统姑且处正在仿真状态,则采用“久停”菜单项,系统久停仿真而后加进“自动|久停”状态.此时如要继承仿真只需采用“开初”菜单项.停止正在自动加工历程中,即系统处于“自动|运止”状态时,“停止”功能灵验.此时采用该菜单项,机床将停止加工而且抬刀,而后末止所有加工任务,系统加进“自动|空闲”状态.那是正在加工历程中让系统仄常中断加工步调的要领.而底下计划的“复位”功能是正在非惯例情况下使用的非仄常中断加工步调的要领.如果系统姑且处正在仿真状态,则采用“停止”菜单项,系统停止仿真而后加进“自动|空闲”状态,然而是本去不退出仿真状态,脚法是让用户分解仿真截止.如果用户还要再次计划,不妨真止“开初”、“下档开初”、“断面继承”等菜单项继承仿真.加进仿真模式并开初仿真与“开初”菜单项类似,如果某个加工步调已经载进,而且目前系统状态为“空闲”,那么采用该菜单项,机床将自动天从加工步调第一句开初真止下速仿真.仿真功能类似于数控系统中的示教功能,然而劣于示教功能.仿真为用户提供了一个赶快而传神的模拟加工环境.正在仿真办法下运止加工步调,系统不再驱效果床干相映的板滞电气动做,而只是正在追踪隐现窗心上下速隐现刀具加工路径.通过仿真,用户不妨预先相识机床要干的疏通形式,预防体例加工步调时的过得而制成机床的益坏,也不妨相识其余一些附加疑息.一朝仿真历程开初,该菜单项形成“停止仿真并退出仿真模式”,真止此功能,仿真将坐时末止.下档开初该功能真止了步调跳段真止的功能.采用该功能,系统弹出“真止(下档选项)”对付话框,如图所示.用户正在对付话框中设定要从步调的第几句开初真止到步调的第几句中断,而后面打“开初”按钮,机床将按您的央供只真止所有加工步调中的指定步调段.该功能也不妨用于仿真正在止.断面继承那个菜单项的功能本质上是“下档开初” 的一个简化版本,真止该项功能,系统从上次加工中断处开初继承真止.该功能也不妨用于仿真正在止.真止加工指令…真止该菜单项,系统弹出“真止加工指令”对付话框,如图所示:底下分别介绍各项下档功能:矩形铣底:如上图所示,用户输进一些必须的参数后,系统便开初真止央供的铣底功能.圆形铣底:如下图所示,用户输进一些必须的参数后,系统便开初真止央供的铣底功能.铣矩形边框:如下图所示,用户输进一些必须的参数后,系统便开初真止央供的铣矩形边框功能.铣圆形边框:如下图所示,用户输进一些必须的参数后,系统便开初真止央供的铣圆形边框功能.间接指令输进:该功能是为流利掌握G代码要领的用户准备的.用户不妨参照《编程脚册》的G指令介绍使用本功能.正在那里,用户不妨间接真止一些G指令代码.那个功能正在数控系统中称为“脚动数据输进(MDI)办法”.那里允许用户坐即输进G指令,进而使得用户能以最大程度的机动性收配机床.如图所示,用户输进并真止坐即指令的步调为:最先,以尺度G要领输进G指令,尺度G要领请参阅编程脚册.比圆,央供主轴回到工件本面上圆10mm处,其G指令为:G00 X0 Y0 Z10 正在目前坐即指令编写框中输进指令,而后,鼠标单打“真止”按钮,大概者按“Enter”键,机床便会依照指令央供进给到指定位子.一朝一条灵验的坐即指令输进,那条指令便会记录正在坐即指令列表中.如果用户要真止的指令已经正在坐即指令列表中,只需用鼠标左键单打对付应的指令,便会真止.微调该功能只是正在自动加工运止历程中,处于久停状态时灵验.用于不中止加工历程,而真止深度的微弱安排.收配界里类似于脚动窗心:对付刀利用对付刀功能,用户能便当天决定符合的工件本面Z背坐标以及正在换刀后沉新矫正Z背坐标.真止该功能时,从菜单中采用对付刀功能,将弹出一个对付话框,如图所示:对付刀时,最先人为决定加工表面,把加工表面树坐为Z背工件本面.而后真止第一次对付刀.正在屡屡换刀后,真止第二次对付刀.依照图中的提示举止收配即可.回板滞本面板滞本面是机床的一个牢固位子,由板滞开关战电气系局部共决定,是板滞坐标系的整面.关于板滞坐标系参照3.2节.真止“回板滞本面”功能需要机床自己的硬件收援,所以,某些型号的机床不收援该功能.由于板滞本面是所有机床的基准.所以,该功能的要害效率正在于矫正目前面坐标.复位正在所有时间,“复位”菜单项皆灵验.采用了该功能,机床将坐时停止目前加工任务(如果目前正正在加工的话),并从报警状态中(如果目前正处正在“报警”状态的话)回复到“空闲”状态.与停止功能分歧,通过复位功能停止加工,机床的主轴、热却状态本去不改变,也不会真止抬刀动做.注意:如果机床的“紧停”旗号不排除,系统不克不迭从“紧停”状态中回复回去.此时,系统提示:紧停锁不释搁.限位释搁该功能用于系统正在逢到硬限位时,姑且屏蔽限位功能,使用脚动收配时机床回复仄常位子的一个脚法.由于此时限位效率被屏蔽掉,所以收配者使用此项功能时要特天留神.。
雕刻机参数设置2

上海原力数控机电有限公司-----condiny
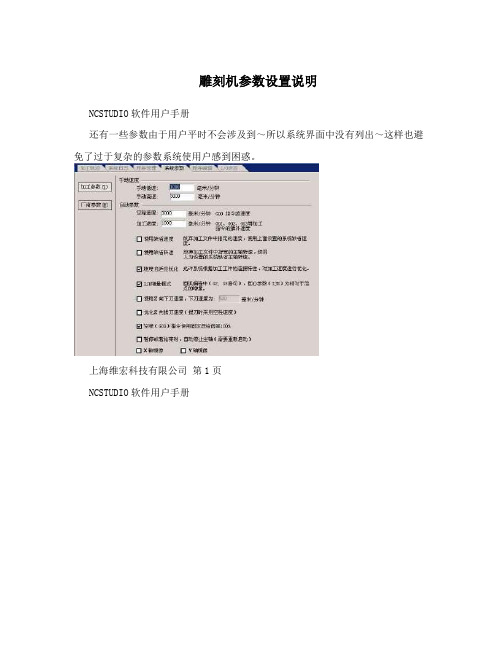
雕刻机参数设置
N0001 最大转速24000或36000 N0002 默认转速24000或36000 N1002 清零工件坐标需先确认否
轴方向
N1100 X
N1101 Y -1或1
N1102 Z
脉冲当量
N1110 X
N1111 Y 0.005
N1112 Z
N2000 紧急取消回机械原点状态否
N2001 加工前需先回机械原点否
粗定位阶段速度
N2120 X 1000
N2121 Y 1000
N2122 Z 800
N4024 起跳速度200
N4025 手动低速1500
N4026 手动高速4500
N4029 微调速度200
N4031 快速横移速度4500
N4032 默认进给速度4500
N4051 安全高度10
N4055 加加速度1000
N4058 参考最大速度1500
N4059 圆弧运动的最小速度500
N4061 插补算法选择 1
N4064 圆弧半径公差 5
N4068 换刀提示有效是或否
N4090 空行程抬刀高度10
N4091 遇到换刀时暂停并提示换刀是或否
N4093 使用ENG文件选刀加工是或否
各轴最大速度
N4250 X 4500
N4251 Y 4500
N4252 Z 3000。
雕刻机参数设置[1]
![雕刻机参数设置[1]](https://img.taocdn.com/s3/m/75f7d53acfc789eb162dc80d.png)
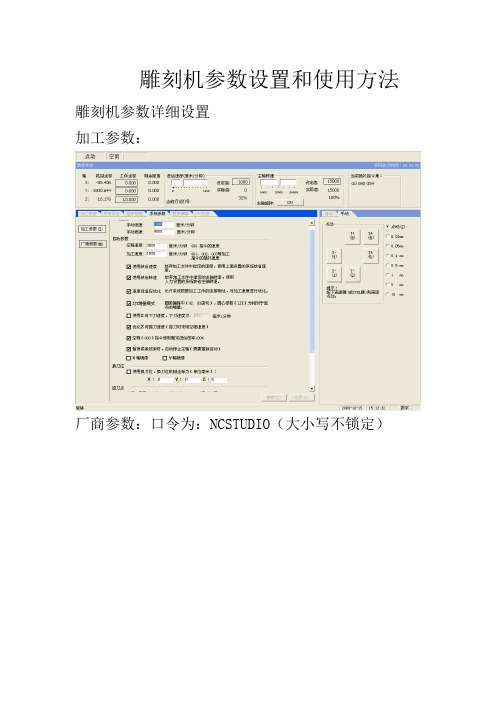
雕刻机参数设置和使用方法雕刻机参数详细设置加工参数:厂商参数:口令为:NCSTUDIO(大小写不锁定)设置完成后点引用重新启动软件就好了一、文泰雕刻软件路径的生成A:二维雕刻路径的生成1: 阴刻、阳刻2: 雕刻深度3: 雕刻方式4: 选择刀具5: 二次加工方式B:三维路径的生成1: 阴刻、阳刻2: 雕刻深度3: 选择刀具C:割的路径生成1: 轮廓线输出方式2: 选择刀具3: 雕刻深度4: 勾边方向二、刀具管理1:刀具的分类2:参数的设置3:添加刀具三、雕刻路径的保存1: 代码格式2: 保存路径3: 保存类型4: 抬刀高度四、维宏系统(NcStudio)的操作步骤1:开机复位2:卸载、载入雕刻文件3:仿真、取消仿真4:定加工原点5:放慢速度、打开并调整主轴速度、开始加工6:调整加工速度7:加工完毕一、文泰雕刻软件路径的生成A:二维雕刻路径的生成选择所要生成路径的部分单击41:阴刻、阳刻阴刻的效果---在图形的内部雕刻上图为实际阳刻效果下图为阴刻做出的阳刻效果阳刻的效果---在图形的外部进行加工阳刻的方法:对所要加工的物体加一个封闭的外框,然后将两者组合在一起2D中仍然选择阴刻。
做出来就是阳刻的效果。
2:雕刻深度刻胸牌全部为0.1MM,3:雕刻方式水平铣底勾边4:刀具库平底尖刀5:二次加工方式此项与雕刻方式互相结合使用,但要注意:此相的刀具库选择的时候,刀具必须与雕刻方式中的刀具是同一把刀!B:三维路径的生成1:阴刻 全部为阴刻 2:雕刻深度 材料厚度的1/23:选择刀具 中心尖刀C:割的路径生成1:轮廓线输出方式图中带箭头的线条为刀具中心线移动的路径, 2:选择刀具 直刀3:雕刻深度割字的情况下可以设雕刻深度为零,机器对刀(Z 轴)以台面为基准点,进行切割 (此方法不易损伤台面) 4:勾边方向当选内轮廓和外轮廓的时候可以选择勾边方向。
其中切割芙蓉板、PVC 板时选择顺时针方向,亚克力板选择逆时针方向。
木工雕刻机电机参数设置

木工雕刻机电机参数设置木工雕刻机电机参数设置引言:木工雕刻机是一种自动化机械设备,用于将原材料(通常是木材)雕刻成各种形状和图案。
它通常由许多不同的部件组成,包括电机。
电机是木工雕刻机的核心组件之一,它提供了所需的动力和速度以完成雕刻工作。
本文将介绍木工雕刻机电机的不同参数设置,包括电机类型、额定功率、转速和电流等。
一、电机类型:目前市场上常见的电机类型有步进电机和伺服电机两种,它们各有优劣,适用于不同的应用场景。
1.步进电机:步进电机是一种开环系统,它能够以步进的方式进行运动,每次步进一个固定的角度(通常为1.8°或0.9°),在步进电机驱动器的控制下,可以精确地控制电机的位置和速度。
步进电机具有结构简单、成本低、容易控制等优点,适用于一些对定位精度要求不高的应用。
2.伺服电机:伺服电机是一种闭环系统,它能够通过编码器和反馈系统实时监测电机的位置,然后通过控制器进行位置和速度的调整,以实现更精确的控制。
伺服电机具有响应速度快、精度高等特点,适用于对定位精度要求较高的应用。
根据具体的需求和预算,可以选择适合的电机类型。
二、额定功率:电机的额定功率是指电机能持续运行的最大功率,通常以千瓦(kW)为单位。
额定功率的选择应根据木工雕刻机的工作负载和需要雕刻的材料等因素进行。
1.小功率电机:小功率电机适用于对切削能力要求不高、只需要进行轻度雕刻的场景。
这种类型的电机通常具有低功耗、低噪音和较低的维护成本等特点。
2.大功率电机:大功率电机适用于对切削能力要求较高的场景,如需要雕刻硬材料或进行深切削等。
这种类型的电机通常具有高功耗、高扭矩和高速度等特点,可以提供更大的切削力和更高的加工效率。
根据具体的雕刻需求和预算限制,可以选择适当的额定功率。
三、转速:电机的转速是指电机输出轴每分钟旋转的圈数,通常以转/分钟(rpm)为单位。
转速直接影响到雕刻机的加工速度和精度,因此需要根据具体的应用需求进行设置和调整。
雕刻机参数设置范文
雕刻机参数设置范文1. 加工速度:加工速度是指雕刻机在进行雕刻操作时,刀具在材料上移动的速度。
通常以mm/min或inch/min为单位。
加工速度的选择要根据材料的硬度、刀具的类型和加工的要求来确定。
若材料较硬,可以适当降低加工速度,以避免刀具损坏;若刀具形状较复杂,可以适当降低加工速度,以提高精度。
2. 加工深度:加工深度是指雕刻机在进行雕刻操作时,刀具在材料上切削的厚度。
通常以mm或inch为单位。
加工深度的选择要考虑材料的硬度和刀具的类型。
一般来说,材料硬度较高时,加工深度要适当减小,以免刀具断裂或材料损坏。
3.刀具类型:刀具类型是指雕刻机所使用的刀具的形状和特点。
常用的刀具类型有直角刀、球头刀、V字刀等等。
刀具的选择要根据加工的要求和材料的特性来确定。
刀具的形状和尺寸会影响到雕刻的效果和精度。
4.刀具路径:刀具路径是指雕刻机在进行雕刻操作时,刀具在材料上移动的路径。
常见的刀具路径有点切割、线切割、曲线切割等等。
刀具路径的选择要考虑到雕刻的要求和材料的特性。
对于复杂的形状,可以采用曲线切割来实现。
5.切削力:切削力是指雕刻机在进行雕刻操作时,刀具对材料施加的力量。
切削力的大小会影响到刀具和材料的磨损情况。
通常情况下,切削力越大,刀具和材料的磨损越快。
因此,要尽量控制切削力的大小,以延长刀具的使用寿命和提高雕刻的质量。
以上是一些常见的雕刻机参数设置。
根据具体的实际情况,还可以根据材料的特性、刀具的选用和雕刻的要求来进行其他参数的设置,以获得更好的雕刻效果和质量。
同时,不同品牌和型号的雕刻机可能会有一些特定的参数设置,需要根据具体的说明书和要求进行操作。
雕刻机面板操作方法

雕刻机面板操作方法雕刻机面板是雕刻机的操作控制界面,通过操作面板可以实现对雕刻机的各项功能设置和控制。
在使用雕刻机时,正确的操作面板是至关重要的,下面就为大家详细介绍雕刻机面板的操作方法。
一、开关机操作通常雕刻机的面板上会有一个电源开关,用于控制雕刻机的开关机。
当需要使用雕刻机时,首先确认电源开关处于关机状态,然后将电源开关打开,即可启动雕刻机。
二、主轴启动设置主轴是雕刻机的核心部件,将会直接影响到雕刻机的雕刻效果。
在使用雕刻机之前,我们需要先进行主轴的启动设置。
首先,在雕刻机面板上找到主轴的控制设置按钮,点击进入主轴设置界面。
在主轴设置界面中,我们可以设置主轴的转速、主轴运行方向以及主轴的启动方式。
通常,我们可以根据具体的雕刻需求,调整主轴转速来达到更好的雕刻效果。
另外,对于某些特殊需要,也可以设置主轴的正反转。
三、加工参数设置在进行雕刻机的加工操作之前,我们需要对加工参数进行设置。
通过雕刻机面板上的参数设置按钮,我们可以进入参数设置界面,进行相应的设置。
在参数设置界面中,我们可以设置雕刻速度、进给速度、切割深度等参数。
这些参数的设置将直接影响到雕刻的质量和效率,因此需要根据具体的加工物和雕刻要求进行调整。
四、坐标轴操作雕刻机通常具备多个坐标轴,如X轴、Y轴和Z轴等。
在进行雕刻操作时,我们有时需要对坐标轴进行调整,以精确控制雕刻的位置和方向。
通过雕刻机面板上的坐标轴控制按钮,我们可以实现对坐标轴的操作。
例如,当需要将刀具移动到指定位置时,可以通过坐标轴控制按钮调整坐标轴的位置,实现刀具的定位。
五、文件管理雕刻机面板上通常会有文件管理功能,用于管理和选择需要进行雕刻的文件。
通过文件管理功能,我们可以选择特定的设计文件进行雕刻操作。
在文件管理界面中,我们可以查看所有的文件列表,并可以按照需要进行选择、导入和删除文件。
这样可以方便我们进行雕刻任务的管理和切换。
六、雕刻程序设置雕刻机面板上还可以设置雕刻程序,以实现不同雕刻任务的自动执行。
雕刻机参数设置说明
还有一些参数由于用户平时不会涉及到,所以系统界面中没有列出,这样也避免了过于复杂的参数系统使用户感到困惑。
手动速度:包括手动高速速度和手动低速速度,这两个值用来控制用户在“点动”模式下的运动速度。
●手动低速速度是指只按下手动方向键时的运动速度;●手动高速速度是指同时按下“高速”键时的运动速度。
这两个值也可以在数控状态窗口中直接设定。
参见4.6节。
自动参数:●空程速度:G00指令的运动速度;●加工速度:G01、G02、G03等加工指令的插补速度。
这两个值控制以自动方式运动时的速度,如果自动模式下的加工程序、或者MDI指令中没有指定速度,就以这里设定的速度运动。
注意:增量方式的运动速度是空程速度。
这两个值也可以在数控状态窗口中直接设定。
参见4.6节。
●使用缺省速度:是否放弃加工程序中指定的速度,使用上面设置的系统缺省速度。
●使用缺省转速:指示系统是否放弃加工程序中指定的主轴转速,使用人为设置的系统缺省转速。
●速度自适应优化:是否允许系统根据加工工件的连接特性,对加工速度进行优化。
●IJK增量模式:圆心编程(IJK)是否为增量模式,某些后处理程序生成的圆弧编程使用的IJK值是增量值。
关于这一点,请参考对应的后处理程序说明。
●使用Z向下刀速度:是否在Z向垂直向下运动时,采用特定的速度落刀速度。
●优化Z向提刀速度:是否在Z向垂直向上运动时,采用G00速度提刀。
点)。
●空程(G00)指令使用固定进给倍率100%:这个参数是一个选项。
指示系统在执行空程指令时,是否忽略进给被率的影响。
这样当改变倍率时,不影响空程移动的速度。
●暂停或者结束时,自动停止主轴(需要重新启动):设定当一个加工程序中途暂停或加工结束后,是否自动停止主轴转动。
●X轴镜像:设定X轴进行镜像。
●Y轴镜像:设定Y轴进行镜像。
换刀位参数:●使用换刀位:如果希望在加工完成后自动回到某个位置,请选择该选项。
其他换刀位参数只有在使用换刀位有效时,才起作用。
雕刻机参数设定

雕刻机参数设定加工参数:手动速度:手动低数:(1000)毫米/分钟手动高速:(2400)毫米/分钟自动参数:空程速度:(2200)毫米/分钟G00指令速度。
加工速度:(1500)毫米/分钟,G01`G02`G03等加工指令的插补速度(√)使用缺省速度(√)使用缺省转速(√)速度自适应优化。
(√)IJK增量模式。
(√)使用Z向下刀速度,下刀速度为(1000)毫米/分钟(√)优化Z向提刀速度(提刀时采用空程速度)(√)空程(G00)指令使用固定进给倍率100%(√)暂停或者结束时,自动停止主轴(需重新启动)()X轴镜象()Y轴镜象换刀位()使用换刀位,换刀位机械坐标为(单位毫米)X:(0 )Y:(0 )Z(0 )退刀点:执行“回零”动作时,刀的上抬高度(相对于工件原点)将退刀点设为(10 )毫米文件输入二维PLT加工深度(2 )毫米抬刀高度(5 )毫米PLT单位每毫米(40)Plu/mm(√)Z轴反向:仅指转换Eng和PLT等非代码格式文件时。
旋转轴()Y轴是旋转轴,即数控转台........................、.........................、回转工件半径为(10)毫米(默认)旋转轴最大速度为:(1000 )毫米/分钟注意:修改旋转轴参数需要重新启动!厂商参数工作台行程:设置工作台行程空间:如果机床运动超出此范围则系统提示软位报警(回机械原点后生效)起点(机械)坐标终点(机械)坐标X方向(0 )毫米X方向(1200 )毫米Y方向(-2500 )毫米Y方向(0 )毫米Z方向(-150 )毫米Z方向(0 )毫米注意:修改工作太行程需重新启动对刀块对刀块的厚度(10 )毫米固定对刀块的机械坐标X:(0)Y(0)毫米固定对刀快速下刀位机械坐标(Z)为(-1)毫米电机参数、X轴:(0.01)毫米/脉冲起跳速度为Y轴:(0.01)毫米/脉冲(300)毫米/分钟Z轴:(0.01)毫米/脉冲Z轴最大速度为当Y轴为旋转轴时,Y轴脉冲当量为:(1000)毫米/分钟(0.006)度/脉冲加速度:警告:该参数一般在出厂已调整好,不恰当地设置此参数会引起加工误差,甚至导致机床损坏。
雕刻机参数设置
雕刻机参数设置和使用方法雕刻机参数详细设置加工参数:厂商参数:口令为:NCSTUDIO(大小写不锁定)设置完成后点引用重新启动软件就好了一、文泰雕刻软件路径的生成A:二维雕刻路径的生成1: 阴刻、阳刻2: 雕刻深度3: 雕刻方式4: 选择刀具5: 二次加工方式B:三维路径的生成1: 阴刻、阳刻2: 雕刻深度3: 选择刀具C:割的路径生成1: 轮廓线输出方式2: 选择刀具3: 雕刻深度4: 勾边方向二、刀具管理1:刀具的分类2:参数的设置3:添加刀具三、雕刻路径的保存1: 代码格式2: 保存路径3: 保存类型4: 抬刀高度四、维宏系统(NcStudio)的操作步骤1:开机复位2:卸载、载入雕刻文件3:仿真、取消仿真4:定加工原点5:放慢速度、打开并调整主轴速度、开始加工6:调整加工速度7:加工完毕一、文泰雕刻软件路径的生成A:二维雕刻路径的生成选择所要生成路径的部分单击二维雕刻路径 线条路径输出检查图形错误 雕刻路径保存三维雕刻路径删除路径用不到123451:阴刻、阳刻阴刻的效果---在图形的内部雕刻上图为实际阳刻效果下图为阴刻做出的阳刻效果阳刻的效果---在图形的外部进行加工阳刻的方法:对所要加工的物体加一个封闭的外框,然后将两者组合在一起2D中仍然选择阴刻。
做出来就是阳刻的效果。
2:雕刻深度刻胸牌全部为0.1MM,3:雕刻方式水平铣底勾边4:刀具库平底尖刀5:二次加工方式此项与雕刻方式互相结合使用,但要注意:此相的刀具库选择的时候,刀具必须与雕刻方式中的刀具是同一把刀!B:三维路径的生成1:阴刻全部为阴刻2:雕刻深度材料厚度的1/23:选择刀具中心尖刀C:割的路径生成1:轮廓线输出方式雕刻刀宽度内轮廓外轮廓原线输图中带箭头的线条为刀具中心线移动的路径, 2:选择刀具 直刀3:雕刻深度割字的情况下可以设雕刻深度为零,机器对刀(Z 轴)以台面为基准点,进行切割 (此方法不易损伤台面) 4:勾边方向当选内轮廓和外轮廓的时候可以选择勾边方向。
CNC数控雕刻机参数设置

弘法雕刻机参数设置一、设置功能配置:(格式化以后)
○1掉电保护
○2选择语言
○3Z轴深度调整值
○4急停开关信号
○5硬限位开关信号
○6传统手动方式
○7换刀设备配置
○8脚踏开关
○9开盖保护开关
○10空运行时是否受速度倍率控制
○11过滤精雕转换文件中的指定
○12旋转轴采用什么标记
○13切换轴是否是旋转轴
二、脉冲当量X200
Y200
Z200
C100
三、机床尺寸
X1200
Y800
Z200
四、速度限制
X轴负方向******** X轴正方向********
Y轴负方向6000
Y轴正方向6000
Z轴负方向3000
Z轴正方向1800
五、速度设置
高速低速
X6000 X2000
Y5000 Y1500
Z4000 Z1000
加工速度20000
抬刀毫米正常200 R6脚是165(低于系统提供的Z轴高度)
七、加工时要用的参数
对刀仪厚度45.455
Y轴中心距离(-307.275)
大荣 CNC参数设置
当量公式:手柄显示数值 / 实际运动距离 * 当前当量设置值
脉冲当量 X轴: 218.30
Y轴: 153.11
Z轴: 318.72
机床尺寸: X轴: 1300.00
Y轴: 2500.00
Z轴: 350.00
电机方向 X轴: 负方向
Y轴: 正方向
Z轴: 负方向。
雕刻机参数设置说明

还有一些参数由于用户平时不会涉及到,所以系统界面中没有列出,这样也避免了过于复杂的参数系统使用户感到困惑。
手动速度:包括手动高速速度和手动低速速度,这两个值用来控制用户在“点动”模式下的运动速度。
手动低速速度是指只按下手动方向键时的运动速度;手动高速速度是指同时按下“高速”键时的运动速度。
这两个值也可以在数控状态窗口中直接设定。
参见节。
自动参数:空程速度:G00 指令的运动速度;加工速度:G01、G02、G03等加工指令的插补速度。
这两个值控制以自动方式运动时的速度,如果自动模式下的加工程序、或者MDI指令中没有指定速度,就以这里设定的速度运动。
注意:增量方式的运动速度是空程速度。
这两个值也可以在数控状态窗口中直接设定。
参见节。
使用缺省速度:是否放弃加工程序中指定的速度,使用上面设置的系统缺省速度。
使用缺省转速:指示系统是否放弃加工程序中指定的主轴转速,使用人为设置的系统缺省转速。
速度自适应优化:是否允许系统根据加工工件的连接特性,对加工速度进行优化。
IJK增量模式:圆心编程(IJK)是否为增量模式,某些后处理程序生成的圆弧编程使用的IJK值是增量值。
关于这一点,请参考对应的后处理程序说明。
使用Z向下刀速度:是否在Z向垂直向下运动时,采用特定的速度落刀速度。
优化Z向提刀速度:是否在Z向垂直向上运动时,采用G00速度提刀。
点)。
空程(G00)指令使用固定进给倍率100%:这个参数是一个选项。
指示系统在执行空程指令时,是否忽略进给被率的影响。
这样当改变倍率时,不影响空程移动的速度。
暂停或者结束时,自动停止主轴(需要重新启动):设定当一个加工程序中途暂停或加工结束后,是否自动停止主轴转动。
X轴镜像:设定X轴进行镜像。
Y轴镜像:设定Y轴进行镜像。
换刀位参数:使用换刀位:如果希望在加工完成后自动回到某个位置,请选择该选项。
其他换刀位参数只有在使用换刀位有效时,才起作用。
换刀位机械坐标X、Y、Z:设置换刀位的机械坐标(注意:不是工件坐标!)。
雕刻机参数设置说明
还有一些参数由于用户平时不会涉及到,所以系统界面中没有列出,这样也避免了过于复杂的参数系统使用户感到困惑。
手动速度:包括手动高速速度和手动低速速度,这两个值用来控制用户在“点动”模式下的运动速度。
●手动低速速度是指只按下手动方向键时的运动速度;●手动高速速度是指同时按下“高速”键时的运动速度。
这两个值也可以在数控状态窗口中直接设定。
参见4.6节。
自动参数:●空程速度:G00指令的运动速度;●加工速度:G01、G02、G03等加工指令的插补速度。
这两个值控制以自动方式运动时的速度,如果自动模式下的加工程序、或者MDI指令中没有指定速度,就以这里设定的速度运动。
注意:增量方式的运动速度是空程速度。
这两个值也可以在数控状态窗口中直接设定。
参见4.6节。
●使用缺省速度:是否放弃加工程序中指定的速度,使用上面设置的系统缺省速度。
●使用缺省转速:指示系统是否放弃加工程序中指定的主轴转速,使用人为设置的系统缺省转速。
●速度自适应优化:是否允许系统根据加工工件的连接特性,对加工速度进行优化。
●IJK增量模式:圆心编程(IJK)是否为增量模式,某些后处理程序生成的圆弧编程使用的IJK值是增量值。
关于这一点,请参考对应的后处理程序说明。
●使用Z向下刀速度:是否在Z向垂直向下运动时,采用特定的速度落刀速度。
●优化Z向提刀速度:是否在Z向垂直向上运动时,采用G00速度提刀。
点)。
●空程(G00)指令使用固定进给倍率100%:这个参数是一个选项。
指示系统在执行空程指令时,是否忽略进给被率的影响。
这样当改变倍率时,不影响空程移动的速度。
●暂停或者结束时,自动停止主轴(需要重新启动):设定当一个加工程序中途暂停或加工结束后,是否自动停止主轴转动。
●X轴镜像:设定X轴进行镜像。
●Y轴镜像:设定Y轴进行镜像。
换刀位参数:●使用换刀位:如果希望在加工完成后自动回到某个位置,请选择该选项。
其他换刀位参数只有在使用换刀位有效时,才起作用。
雕刻机图解参数使用说明讲解

还有一些参数由于用户平时不会涉及到,所以系统界面中没有列出,这样也避免了过于复杂的参数系统使用户感到困惑。
手动速度:包括手动高速速度和手动低速速度,这两个值用来控制用户在“点动”模式下的运动速度。
●手动低速速度是指只按下手动方向键时的运动速度;●手动高速速度是指同时按下“高速”键时的运动速度。
这两个值也可以在数控状态窗口中直接设定。
参见4.6节。
自动参数:●空程速度:G00 指令的运动速度;●加工速度:G01、G02、G03等加工指令的插补速度。
这两个值控制以自动方式运动时的速度,如果自动模式下的加工程序、或者MDI指令中没有指定速度,就以这里设定的速度运动。
注意:增量方式的运动速度是空程速度。
这两个值也可以在数控状态窗口中直接设定。
参见4.6节。
●使用缺省速度:是否放弃加工程序中指定的速度,使用上面设置的系统缺省速度。
●使用缺省转速:指示系统是否放弃加工程序中指定的主轴转速,使用人为设置的系统缺省转速。
●速度自适应优化:是否允许系统根据加工工件的连接特性,对加工速度进行优化。
●IJK增量模式:圆心编程(IJK)是否为增量模式,某些后处理程序生成的圆弧编程使用的IJK值是增量值。
关于这一点,请参考对应的后处理程序说明。
●使用Z向下刀速度:是否在Z向垂直向下运动时,采用特定的速度落刀速度。
●优化Z向提刀速度:是否在Z向垂直向上运动时,采用G00速度提刀。
点)。
●空程(G00)指令使用固定进给倍率100%:这个参数是一个选项。
指示系统在执行空程指令时,是否忽略进给被率的影响。
这样当改变倍率时,不影响空程移动的速度。
●暂停或者结束时,自动停止主轴(需要重新启动):设定当一个加工程序中途暂停或加工结束后,是否自动停止主轴转动。
●X轴镜像:设定X轴进行镜像。
●Y轴镜像:设定Y轴进行镜像。
换刀位参数:●使用换刀位:如果希望在加工完成后自动回到某个位置,请选择该选项。
其他换刀位参数只有在使用换刀位有效时,才起作用。
雕刻机参数设置说明
雕刻机参数设置说明NCSTUDIO软件用户手册还有一些参数由于用户平时不会涉及到~所以系统界面中没有列出~这样也避免了过于复杂的参数系统使用户感到困惑。
上海维宏科技有限公司第1页NCSTUDIO软件用户手册手动速度:包括手动高速速度和手动低速速度~这两个值用来控制用户在“点动”模式下的运动速度。
, 手动低速速度是指只按下手动方向键时的运动速度,, 手动高速速度是指同时按下“高速”键时的运动速度。
这两个值也可以在数控状态窗口中直接设定。
参见4.6节。
自动参数:, 空程速度:G00 指令的运动速度,, 加工速度:G01、G02、G03等加工指令的插补速度。
这两个值控制以自动方式运动时的速度~如果自动模式下的加工程序、或者MDI指令中没有指定速度~就以这里设定的速度运动。
注意:增量方式的运动速度是空程速度。
上海维宏科技有限公司第2页NCSTUDIO软件用户手册这两个值也可以在数控状态窗口中直接设定。
参见4.6节。
, 使用缺省速度:是否放弃加工程序中指定的速度~使用上面设置的系统缺省速度。
, 使用缺省转速:指示系统是否放弃加工程序中指定的主轴转速~使用人为设置的系统缺省转速。
, 速度自适应优化:是否允许系统根据加工工件的连接特性~对加工速度进行优化。
,是否为增量模式~某些后处理程序生成的圆弧, IJK增量模式:圆心编程,IJK 编程使用的IJK值是增量值。
关于这一点~请参考对应的后处理程序说明。
, 使用,向下刀速度:是否在,向垂直向下运动时~采用特定的速度落刀速度。
, 优化,向提刀速度:是否在,向垂直向上运动时~采用G00速度提刀。
点)。
, 空程,G00,指令使用固定进给倍率100%:这个参数是一个选项。
指示系统在执行空程指令时~是否忽略进给被率的影响。
这样当改变倍率时~不影响空程移动的速度。
, 暂停或者结束时~自动停止主轴,需要重新启动,:设定当一个加工程序中途暂停或加工结束后~是否自动停止主轴转动。
Type3-雕刻机设置
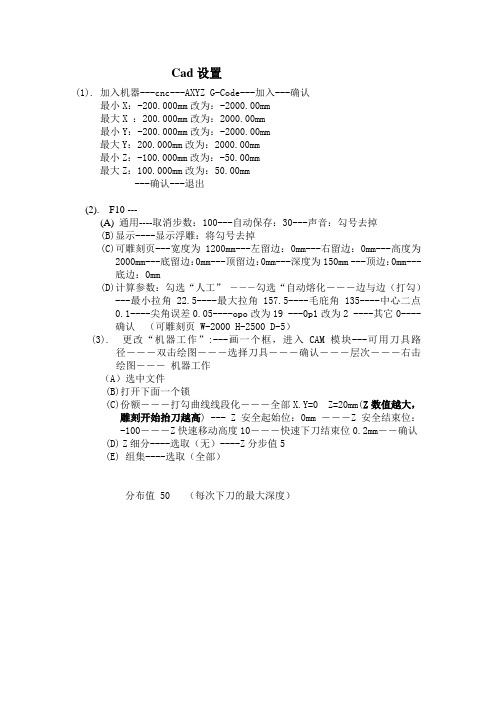
Cad设置(1). 加入机器---cnc---AXYZ G-Code---加入---确认最小X:-200.000mm改为:-2000.00mm最大X :200.000mm改为:2000.00mm最小Y:-200.000mm改为:-2000.00mm最大Y:200.000mm改为:2000.00mm最小Z:-100.000mm改为:-50.00mm最大Z:100.000mm改为:50.00mm---确认---退出(2). F10 ---(A) 通用----取消步数:100---自动保存:30---声音:勾号去掉(B)显示----显示浮雕:将勾号去掉(C)可雕刻页---宽度为1200mm---左留边:0mm---右留边:0mm---高度为2000mm---底留边:0mm---顶留边:0mm---深度为150mm ---顶边:0mm---底边:0mm(D)计算参数:勾选“人工”―――勾选“自动熔化―――边与边(打勾)---最小拉角22.5----最大拉角157.5----毛庇角135----中心二点0.1----尖角误差0.05----opo改为19 ---0p1改为2 ----其它0----确认(可雕刻页 W-2000 H-2500 D-5)(3). 更改“机器工作”:---画一个框,进入CAM模块---可用刀具路径―――双击绘图―――选择刀具―――确认―――层次―――右击绘图―――机器工作(A)选中文件(B)打开下面一个锁(C)份额―――打勾曲线线段化―――全部X.Y=0 Z=20mm(Z数值越大,雕刻开始抬刀越高) --- Z安全起始位:0mm ―――Z安全结束位:-100―――Z快速移动高度10―――快速下刀结束位0.2mm――确认(D)Z细分----选取(无)----Z分步值5(E) 组集----选取(全部)分布值 50 (每次下刀的最大深度)雕刻机设置---1 Ncstydio加工参数手底 10000手高 10000空 10000加 10000打勾使用缺……打勾使用缺……打勾速度自……空 IJK……打勾使用Z向下……300mm/分钟打勾优画Z…….打勾空程(G00)……打勾暂停或…..空X 空Y换刀位空使用换刀位X:0 Y:0 Z:0退刀点设为20mm文件输入二维2 抬高5PTL 40打勾Z反向厂商参数起X 0 终X 1300Y 0 Y 2500Z -150 Z 0对刀块12mm电机参数X 0.0098175 起跳100Y 0.0098175Z 0.0098175 Z速5000加速度单200弯500主参数主高24000主启6000雕刻机设置---2 Ncstydio加工参数手底 6000手高 8000空 800加 600打勾使用缺……打勾使用缺……打勾速度自……空 IJK……(工厂)打勾使用Z向下……300mm/分钟打勾优画Z…….打勾空程(G00)……打勾暂停或…..空X 空Y换刀位空使用换刀位X:0 Y:0 Z:0退刀点设为10m文件输入二维2 抬高5PTL 40打勾Z反向厂商参数起X 0 终X 1300Y 0 Y 2500Z -150 Z 0对刀块12mm电机参数X 0.0098175 起跳100Y 0.0098175Z 0.0098175 Z速5000加速度设定单200设定弯500主参数主高24000主启6000。
Type3-雕刻机设置
Cad设置(1). 加入机器---cnc---AXYZ G-Code---加入---确认最小X:-200.000mm改为:-2000.00mm最大X :200.000mm改为:2000.00mm最小Y:-200.000mm改为:-2000.00mm最大Y:200.000mm改为:2000.00mm最小Z:-100.000mm改为:-50.00mm最大Z:100.000mm改为:50.00mm---确认---退出(2). F10 ---(A) 通用----取消步数:100---自动保存:30---声音:勾号去掉(B)显示----显示浮雕:将勾号去掉(C)可雕刻页---宽度为1200mm---左留边:0mm---右留边:0mm---高度为2000mm---底留边:0mm---顶留边:0mm---深度为150mm ---顶边:0mm---底边:0mm(D)计算参数:勾选“人工”―――勾选“自动熔化―――边与边(打勾)---最小拉角22.5----最大拉角157.5----毛庇角135----中心二点0.1----尖角误差0.05----opo改为19 ---0p1改为2 ----其它0----确认(可雕刻页 W-2000 H-2500 D-5)(3). 更改“机器工作”:---画一个框,进入CAM模块---可用刀具路径―――双击绘图―――选择刀具―――确认―――层次―――右击绘图―――机器工作(A)选中文件(B)打开下面一个锁(C)份额―――打勾曲线线段化―――全部X.Y=0 Z=20mm(Z数值越大,雕刻开始抬刀越高) --- Z安全起始位:0mm ―――Z安全结束位:-100―――Z快速移动高度10―――快速下刀结束位0.2mm――确认(D)Z细分----选取(无)----Z分步值5(E) 组集----选取(全部)分布值 50 (每次下刀的最大深度)雕刻机设置---1 Ncstydio加工参数手底 10000手高 10000空 10000加 10000打勾使用缺……打勾使用缺……打勾速度自……空 IJK……打勾使用Z向下……300mm/分钟打勾优画Z…….打勾空程(G00)……打勾暂停或…..空X 空Y换刀位空使用换刀位X:0 Y:0 Z:0退刀点设为20mm文件输入二维2 抬高5PTL 40打勾Z反向厂商参数起X 0 终X 1300Y 0 Y 2500Z -150 Z 0对刀块12mm电机参数X 0.0098175 起跳100Y 0.0098175Z 0.0098175 Z速5000加速度单200弯500主参数主高24000主启6000雕刻机设置---2 Ncstydio加工参数手底 6000手高 8000空 800加 600打勾使用缺……打勾使用缺……打勾速度自……空 IJK……(工厂)打勾使用Z向下……300mm/分钟打勾优画Z…….打勾空程(G00)……打勾暂停或…..空X 空Y换刀位空使用换刀位X:0 Y:0 Z:0退刀点设为10m文件输入二维2 抬高5PTL 40打勾Z反向厂商参数起X 0 终X 1300Y 0 Y 2500Z -150 Z 0对刀块12mm电机参数X 0.0098175 起跳100Y 0.0098175Z 0.0098175 Z速5000加速度设定单200设定弯500主参数主高24000主启6000。
雕刻机参数设置及操作

安装参数设置方法一、将维宏卡装到电脑PCI插槽,请注意插紧、插牢。
二、光盘放入光驱,打开/维宏/Ncstudio V5.5 中文Setup/文件夹,点击Setup.exe,一直点击“下一步”,完成安装,重启电脑。
三、安装数控适配器驱动,右键“我的电脑”/“属性”/“硬件”/“设备管理器”,右键黄色的问号,点击“更新驱动程序”,一直点击“下一步”,完成安装。
四、维宏参数设置:系统参数/加工参数设置如图维宏参数设置:系统参数/厂商参数(密码:NcStudio)具体尺寸以实际机器尺寸为准!电机参数:X=0.00625,Y=0.00625,Z=0.003125具体加工参数根据加工材料、加工经验等实际情况而定,本参数仅做参考!开机在开机之前,首先确定机床与计算机所有连接正常,然后打开机床电源和计算机电源.在系统启动完毕后,进入Ncstudio™数控系统.1.2 机械复位(可选)只有在有回机械原点功能的机床上,且需要时才涉及本节内容,请参考机床手册.如果机床支持回机械原点操作,选择“回机械原点”菜单.机床将自动回到机械原点,并且校正系统坐标系统.在某些情形下,如上次正常停机后,重新开机并继续上次的操作,用户不必执行机械复位操作.因为,Ncstudio™系统在正常退出时,保存当前坐标信息.另外,如果用户确认当前位置正确,也可以不执行此操作.1.3 载入加工程序在加工之前,用户一般要载入需要的加工程序,否则,一些与自动加工有关的功能是无效的.选择“打开(F)|打开(O)…”菜单,将弹出Windows标准的文件操作对话框,可以从中选择要打开文件所在的驱动器、路径以及文件名.单击“打开”按钮后,加工程序就载入系统.此时,用户可按F2键,切换到“加工程序”窗口,查看当前加工程序.1.4 手动操作显示手动操作界面选择“查看(V)|显示手动界面(M)”菜单项,参数显示窗口将显示一个手动操作的界面,通过这个界面,您可以对机床进行手动操作.手动移动通过计算机数字小键盘上的相应键可对机床进行手动移动.此时小键盘上的NUMLOCK灯应亮.相应键为:4 —X轴正方向6 —X轴负方向8 —Y轴正方向2 —Y轴负方向9 —Z轴正方向1 —Z轴负方向这些键与CTRL结合后可实现机床的手动高速移动.1.5 确定工件原点在加工程序中的X、Y、Z三坐标的原点就是工件原点.在加工之前,我们需要把该位置同实际位置联系起来.步骤是:把机床X、Y手动走到工件上的希望的原点位置,选择“把当前点设为工件原点”菜单,或者在坐标窗口把当前位置的坐标值清零,这样在执行加工程序时就以当前位置为起始点进行加工.上述步骤完成了X、Y轴的工件原点设定,但是Z轴的工件原点设置需要更为精确的操作手段.本系统同机床硬件相配合提供了Z轴对刀功能.选择“操作(O)|浮动对刀(Q)…”功能,完成浮动对刀.。
雕刻机参数设定
雕刻机参数设定加工参数:手动速度:手动低数:(1000)毫米/分钟手动高速:(2400)毫米/分钟自动参数:空程速度:(2200)毫米/分钟G00指令速度。
加工速度:(1500)毫米/分钟,G01`G02`G03等加工指令的插补速度(√)使用缺省速度(√)使用缺省转速(√)速度自适应优化。
(√)IJK增量模式。
(√)使用Z向下刀速度,下刀速度为(1000)毫米/分钟(√)优化Z向提刀速度(提刀时采用空程速度)(√)空程(G00)指令使用固定进给倍率100%(√)暂停或者结束时,自动停止主轴(需重新启动)()X轴镜象()Y轴镜象换刀位()使用换刀位,换刀位机械坐标为(单位毫米)X:(0 )Y:(0 )Z(0 )退刀点:执行“回零”动作时,刀的上抬高度(相对于工件原点)将退刀点设为(10 )毫米文件输入二维PLT加工深度(2 )毫米抬刀高度(5 )毫米PLT单位每毫米(40)Plu/mm(√)Z轴反向:仅指转换Eng和PLT等非代码格式文件时。
旋转轴()Y轴是旋转轴,即数控转台........................、.........................、回转工件半径为(10)毫米(默认)旋转轴最大速度为:(1000 )毫米/分钟注意:修改旋转轴参数需要重新启动!厂商参数工作台行程:设置工作台行程空间:如果机床运动超出此范围则系统提示软位报警(回机械原点后生效)起点(机械)坐标终点(机械)坐标X方向(0 )毫米X方向(1200 )毫米Y方向(-2500 )毫米Y方向(0 )毫米Z方向(-150 )毫米Z方向(0 )毫米注意:修改工作太行程需重新启动对刀块对刀块的厚度(10 )毫米固定对刀块的机械坐标X:(0)Y(0)毫米固定对刀快速下刀位机械坐标(Z)为(-1)毫米电机参数、X轴:(0.01)毫米/脉冲起跳速度为Y轴:(0.01)毫米/脉冲(300)毫米/分钟Z轴:(0.01)毫米/脉冲Z轴最大速度为当Y轴为旋转轴时,Y轴脉冲当量为:(1000)毫米/分钟(0.006)度/脉冲加速度:警告:该参数一般在出厂已调整好,不恰当地设置此参数会引起加工误差,甚至导致机床损坏。
木工雕刻机常用的调试参数
Y轴镜像:设定Y轴进行镜像。
X轴镜像:设定X轴进行镜像。
加工速度:木工雕刻机正常加工有效速度,是标准代码G01、G02、G03等加工指令的插补速度。
优化Z向提刀速度:是否在Z向垂直向上运动时,采用G00速度提刀。
空程(G00)指令使用固定进给倍率100%:这个参数是一个选项。
指示系统在执行空程指令时,是否忽略进给被率的影响。
这样当改变倍率时,不影响空程移动的速度。
缺省速度:是否放弃加工程序中指定的速度,使用上面设置的系统缺省速度。
使用缺省转速:指示系统是否放弃加工程序中指定的主轴转速,使用人为设置的系统缺省转速。
IJK增量模式:圆心编程(IJK)是否为增量模式,某些后处理程序生成的圆弧编程使用的IJK值是增量值。
暂停或者结束时,自动停止主轴(需要重新启动):设定当一个加工程序中途暂停或加工结束后,是否自动停止主轴转动。
速度自适应优化:是否允许系统根据加工工件的连接特性,对加工速度进行优化。
空程速度:通俗一些就是指机器空跑状态时的速度,也就是标准代码G00 指令的运动速度。
使用Z向下刀速度:是否在Z向垂直向下运动时,采用特定的速度落刀速度。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
还有一些参数由于用户平时不会涉及到,所以系统界面中没有列出,这样也避免了过于复杂的参数系统使用户感到困惑。
手动速度:包括手动高速速度和手动低速速度,这两个值用来控制用户在“点动” 模式下的运动速度。
手动低速速度是指只按下手动方向键时的运动速度;手动高速速度是指同时按下“高速”键时的运动速度。
这两个值也可以在数控状态窗口中直接设定。
参见 4.6节。
自动参数:空程速度:G00指令的运动速度;加工速度:G01、G02、G03等加工指令的插补速度。
这两个值控制以自动方式运动时的速度,如果自动模式下的加工程序、或者MDI指令中没有指定速度,就以这里设定的速度运动增量方式的运动速度是空程速度。
这两个值也可以在数控状态窗口中直接设定。
参见 4.6节。
使用缺省速度:是否放弃加工程序中指定的速度,使用上面设置的系统缺省速度。
使用缺省转速:指示系统是否放弃加工程序中指定的主轴转速,使用人为设置的系统缺省转速。
速度自适应优化:是否允许系统根据加工工件的连接特性,对加工速度进行优化。
IJK增量模式:圆心编程(IJK)是否为增量模式,某些后处理程序生成的圆弧编程使用的IJK值是增量值。
关于这一点,请参考对应的后处理程序说明。
使用Z向下刀速度:是否在Z向垂直向下运动时,采用特定的速度落刀速度。
优化Z向提刀速度:是否在Z向垂直向上运动时,采用G00速度提刀。
点)。
空程(G00)指令使用固定进给倍率100%:这个参数是一个选项。
指示系统在执行空程指令时,是否忽略进给被率的影响。
这样当改变倍率时,不影响空程移动的速度。
暂停或者结束时,自动停止主轴(需要重新启动):设定当一个加工程序中途暂停或加工结束后,是否自动停止主轴转动。
X轴镜像:设定X轴进行镜像。
丫轴镜像:设定丫轴进行镜像。
换刀位参数:使用换刀位:如果希望在加工完成后自动回到某个位置,请选择该选项。
其他换刀位参数只有在使用换刀位有效时,才起作用。
换刀位机械坐标X、丫、Z:设置换刀位的机械坐标(注意:不是工件坐标!)退刀点参数:退刀点:执行回工件原点、断点继续动作时,刀的上抬高度(相对工件原点)。
文件输入参数:二维PLT加工深度:设定载入PLT文件加工时的刀具深度。
抬刀高度:设定PLT文件加工时的抬起刀具的高度。
PLT单位每毫米:设定PLT单位值。
Z轴反向:设定是否启用Z轴反向功能。
本系统默认为Z轴向上为正。
旋转轴参数:丫轴是旋转轴:如果丫轴是旋转轴,选择该选项。
其他旋转轴参数只有在旋转轴有效时,才可以设置:旋转轴使用角度单位(度):如果回转体加工程序文件中旋转轴以角度为单位,选择该项。
旋转轴使用长度单位(毫米):如果回转体加工程序文件中旋转轴以加工表面的长度为计量单位,选择该项。
这时需要输入工件的回转半径。
厂商参数用户一般情况下接触不到“厂商参数”,所以可以跳过本节。
对于没有授权的普通用户,系统在进入“厂商参数”之前也可能提示输入口令。
这只是为了防止用户偶尔修改了这些重要参数,而导致系统出现故障。
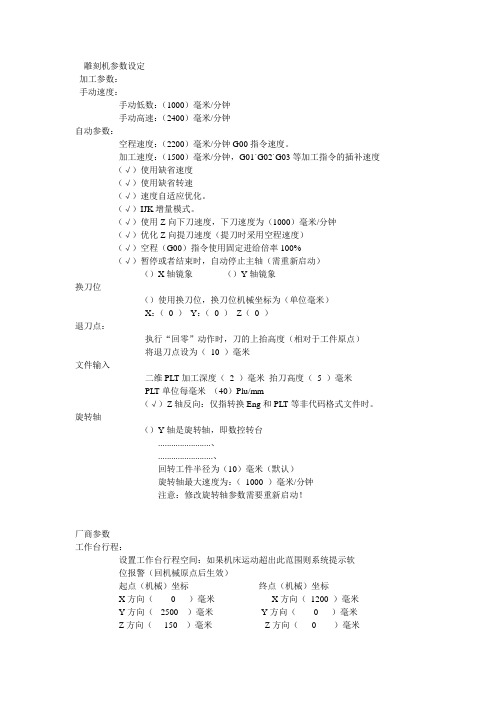
垃置工作合行裸空阖:如果机廉运动超出此范園」!M 垂蔬提示歎 限应报雲(回机13原点启生如;)■善告:该值在岀-吋己蛭设置好’诸勿僧自修改口注盍:修改工作台行程襦要重韜启动程序!对刀决的厚度宵s毫栄 圃走对刀块的机翩坐麻X : |o r ; P 壬米电机參数 ------------------------------------------------------------K 轴.f 00312E毫米/脇冲 丫轴:^0031^5 竜米/腸神Z 轴:°-003155毫米/腻冲 当Y 轴力礎转轴时,vww 当量为:P 006 度倔冲注意:修取酥沖当呈需要重斯启动程序!起跳逵虞为:300董米/■分钟加速度雪甘:该琴数一股在出厂时己超调整好.不恰当地设置此琴 数会引起加工误差,甚至导致机斥报坏•设矩单轴度为:亳米丿秒£设定弯道力度为:而5—空米;■秒E 主轴卷数主舸彊高转速: 阿转/分聊 主轴启动(停止脯司;丘[毫秒 手軽脈沖发生需 P 直持手盘脉冲发生器手轮)17严榕手楣脉冲览生器计数在遠沖惜况下 > 机床运动的距离严梏对应手轮计数> 但是,在手轮转动太快的惜況下 > 即使手轮停止,机 床可能仍煞运动较晨时间・注意:修改手轮遽數需要重新启动稈序F工作台行程空间:指工作台有效加工范围,这里使用的是机械坐标,注意,一般 Z 轴的机械零点在上 面,所力肛参数① 厂帝欄血) 起点(机械)坐际 X 方向:工作台行程Y 方向2方向-「彎点I 机械)坐痞以,Z轴的有效行程范围一般是小于零的。
根据机械限位开关的位置,确定实际的行程,对保护机床是非常有帮助的。
在合理地设置了工作台行程空间后,如果机床运动超出此范围,则系统提示软限位报警,这时候起作用的不是真实的限位开关,而软件根据当前机械坐标和工作台行程空间相比较得出的结果,而不会造成因为撞击限位开关或者硬限位可能带来的损坏。
该值在出厂时已经设置好,请勿擅自修改!如果要修改,请仔细测量。
对刀块参数:对刀块厚度:请准确测量对刀块厚度填入此处。
注意:该值在出厂一般也已经设置好,请勿擅自修改。
固定对刀块的机械坐标:在使用固定对刀块工作方式时,需要指定规定对刀块的机械坐标,请准确填入此值,保证对刀成功。
电机参数:脉冲当量:是指运动控制卡能够处理的最小位移量,在步进系统中,它一般对应着一个步进脉冲,再根据传动关系,把步进脉冲的角位移量转化为直线量。
起跳速度:该参数对应步进电机的起跳频率。
加速度:系统使用两个加速度参数来确定运动的加速能力:单轴加速度:用以描述单个进给轴的加减速能力;弯道加速度:用以描述多个进给轴联动时的加减速能力;警告.该参数一般在出厂时已经调整好。
不恰当地设置此参数会引起加工误差,甚至导致机床损坏。
主轴参数这组参数用于控制主轴的行为。
具体的指标有两个:主轴最高转速和主轴启动(停止)时间。
主轴最高转速当系统使用连续转速控制方式时,最大的模拟输出量对应的主轴转速。
主轴启动(停止)时间在程序开始和停止时,如果使用主轴自动启停功能,由于主轴启停需要一定的时间,需要加入一定的延时,此参数用于设定延时时间。
手摇脉冲发生器新版本的Ncstudio支持手摇脉冲发生器。
如果准备使用此项功能,请正确设置本组参数。
本组参数有两个:支持手摇脉冲发生器和严格手摇脉冲发生器记数。
支持手摇脉冲发生器:当准备使用手摇脉冲发生器,必须使该选项有效。
此时运动控制卡的输入输出按照手摇脉冲发生器方式定义。
严格手摇脉冲发生器记数:在这种情况下,机床运动的距离严格对应手轮计数,但是,在手轮转动太快的情况下,即使手轮停止,机床可能仍然运动较长时间。
不使用本参数时,系统对手轮的转动有较快的响应时间,但是,当转动太快时, 可能造成机床运动的距离与手轮转动的距离不符。
1.1程序编辑窗口编辑窗口的上端是被编辑程序文件的文件名。
下面是一个标准的Windows风格编辑窗口。
该窗口的编辑能力比Windows配置的“附件”程序“记事本”的编辑能力要大的多,从理论上说,该编辑窗口可以编辑超过1000兆(也就是1吉,1G)字节大小的加工程序,从而满足了编辑任意复杂加工程序的要求。
1.2 输入输出状态(I/O状态)窗口输入输出(I/O)状态窗口显示系统I/O的当前映像,这对系统监视和故障诊断非常有帮助。
F * * P 屮讥伏态■名称引脚号1喘口号[很性db.JL-01FAD N0•忑限位J1-06PA1S1■丫限位JL-07FA2K2■限位JL-06FA3n3• 丫手动负向J2-04FA4s4• X手动负向J2-17FA5K5•詹趣1J2-0O PA6呂•壬手动正向J2-1S FAT K7•倍率J2-07FCl H£•三手动负向J2-06FC*12•龙职正向J2-1Q FCS1113■倍®IO J2-05PCB S14•丫手动正向J2-1E FC7K担0 倍®100^J2-23PBO F0O冷却JL-12FBI S1O王轴JL-13FB2K2该窗口显示的内容依据不同的板卡设置和不同的用户需求有所不同,这里给出的内容仅供参考。
2 Ncstudio?菜单系统2.1 “文件”菜单在“文件”菜单中包含用于对文件进行操作的命令选项。
该下拉菜单的前两项用于程序文件的“载入”和“卸出”。
这里的载入和卸出功能与自动加工有关,是指程序文件装载到数控程序解释缓冲区,以及从其中卸载,载入后该程序显示在自动窗口中。
中间的七个菜单项用于程序文件的编辑。
由编辑功能打开的文件显示在编辑窗口中。
请注意与“载入”和“卸出”功能的区别。
打开并装载“打开并装载”菜单项也可用快捷键“ CTRL+O ”快速执行。
该菜单用于打开已有的、存于磁盘上的加工程序文件,并将其装载到系统的数控程序解释缓冲区,这样系统数控程序解释引擎就可以对缓冲区种的数据逐行解释,并把产生的加工指令传递到数控控制卡。
这就是加工过程的实现。
选择该菜单项弹出“打开”对话框,如图所示:lelc ill*:ZJ 鱼1 皆 flj 同團用户可以从中选择要打开程序文件所在的磁盘驱动器、路径以及文件名。
打开加工 程序后,用户可以在自动窗口中看到该程序。
另外,打开加工程序后,用户能注意到系统主窗口的标题栏发生变化:已经打开的加工程序名缀在程序名称之后;文件窗口显示出当前打开的文件内容; 一些原来与自动加工有关的被禁止的菜单项被使能,例如: “操作”菜单的“开始”菜单项,这表明用户可以进行自动加工操作。
在旧的Ncstudio?版本中,一旦加工程序载入系统,该文件就处于使用状态,这意 味着其它程序不能对该文件进行修改(但是可以执行“读”操作) ,因此,用户若要修 改该文件,必须在Ncstudio?系统中关闭该文件。
这个限制在新版本中得到根本改进。
新版本,也就是版本5.0以后的版本,将程序文件装载到系统的数控程序解释缓冲 区后,以后的访问就基于该缓冲区,与实际文件脱离,从而实现了在加工程序文件载入 系统中后,仍然可以对文件进行修改,而此时的修改与正在加工的文件无关;如果需要 应用这些修改,可以将程序文件重新载入系统。
从5.4.33版本开始,增加了对精雕加工文件(*.eng )的支持。
卸载在加工程序载入系统后,用户可以选择关闭功能,关闭当前装载到系统的数控程序 解释缓冲区的文件。
如果当前文件正在加工,则不能被关闭新建加工程序Am 削呂 u'li'i'o 曽bM 耳 n : Hnundc £i » th« 飢GM]kEri.riQG —IT ■■.■ix 塔 J .i[女斗昊si c. |fi-c E ii iii«* i ;* ¥.« nc .r~^~|选择该功能,系统打开一个编辑窗口,供用户编辑新建文件之用,在编辑全过程用户可以随时保存该文件。