牛顿法PQ分解法潮流计算过程
电力系统课程设计潮流计算
电力系统课程设计潮流计算潮流计算是电力系统非常重要的分析计算,用以研究系统规划和运行中提出的各种问题。
对规划中的电力系统,通过潮流计算可以检验所提出的电力系统规划方案能否满足各种运行方式的要求;对运行中的电力系统,通过潮流计算可以预知各种负荷变化和网络结构的改变会不会危及系统的安全,系统中所有母线的电压是否在允许的范围以内,系统中各种元件(线路、变压器等)是否会出现过负荷,以及可能出现过负荷时应事先采取哪些预防措施等。
潮流计算是电力系统分析最基本的计算。
除它自身的重要作用之外,潮流计算还是网损计算、静态安全分析、暂态稳定计算、小干扰静态稳定计算、短路计算、静态和动态等值计算的基础。
实际电力系统的潮流计算主要采用牛顿-拉夫逊法。
按电压的不同表示方法,牛顿-拉夫逊潮流计算分为直角坐标形式和极坐标形式两种。
本次计算采用直角坐标形式下的牛顿-拉夫逊法,牛顿-拉夫逊法有很好的收敛性,但要求有合适的初值。
传统的潮流计算程序缺乏图形用户界面,结果显示不直接难与其他分析功能集成。
网络原始数据输入工作大量且易于出错。
本文采用MATLAB 语言运行WINDOWS操作系统的潮流计算软件。
目前MATLAB已成为国际控制界最流行、使用最广泛的语言了。
它的强大的矩阵处理功能给电力系统的分析、计算带来很多方便,而且采用MATLAB界面直观,运行稳定,计算准确。
所以本次课程设计程序设计采用MATLAB计算。
1.1.2设计要求1.程序源代码;2.给定题目的输入,输出文件;3.程序说明;4.给定系统的程序计算过程;5.给定系统的手算过程(至少迭代2次)。
1.2设计题目电力系统潮流计算(牛顿-拉夫逊法、P-Q分解法)1.3设计内容1.根据电力系统网络推导电力网络数学模型,写出节点导纳矩阵;2.赋予各节点电压变量(直角坐标系形式)初值后,求解不平衡量;3.形成雅可比矩阵;4.求解修正量后,重新修改初值,从2开始重新循环计算;5.求解的电压变量达到所要求的精度时,再计算各支路功率分布、功率损耗和平衡节点功率;6.上机编程调试;7.计算分析给定系统潮流分析并与手工计算结果做比较分析;8.书写课程设计说明书。
(完整word版)PQ分解法计算潮流
一、PQ 分解法的原理P —Q 分解法是牛顿-拉夫逊法潮流计算的一种简化方法。
P-Q 分解法利用了电力系统的一些特有的运行特性,对牛顿-拉夫逊法做了简化,以改进和提高计算速度。
的基本思想是根据电力系统实际运行特点:通常网络上的电抗远大于电阻,则系统母线电压幅值的微小变化对用功功率的改变影响很小。
同样,母线电压相角的的改变对无功功率的影响较小.因此,节点功率方程在用极坐标形式表示时。
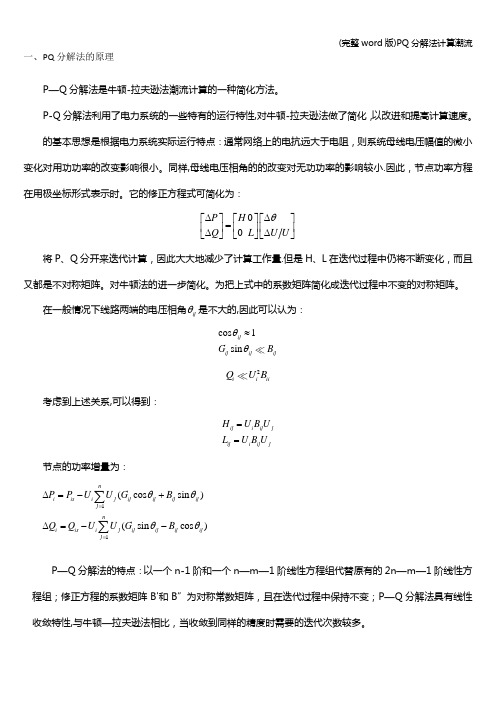
它的修正方程式可简化为:00P H Q L U U θ∆∆⎡⎤⎡⎤⎡⎤=⎢⎥⎢⎥⎢⎥∆∆⎣⎦⎣⎦⎣⎦将P 、Q 分开来迭代计算,因此大大地减少了计算工作量.但是H 、L 在迭代过程中仍将不断变化,而且又都是不对称矩阵。
对牛顿法的进一步简化。
为把上式中的系数矩阵简化成迭代过程中不变的对称矩阵。
在一般情况下线路两端的电压相角ij θ是不大的,因此可以认为:cos 1sin ij ij ijijG B θθ≈2ii ii Q U B考虑到上述关系,可以得到:ij i ij j ij i ij jH U B U L U B U ==节点的功率增量为:11(cos sin )(sin cos )ni is i j ij ij ij ij j ni is i j ij ij ij ij j P P U U G B Q Q U U G B θθθθ==∆=-+∆=--∑∑P —Q 分解法的特点:以一个n-1阶和一个n —m —1阶线性方程组代替原有的2n —m —1阶线性方程组;修正方程的系数矩阵B'和B”为对称常数矩阵,且在迭代过程中保持不变;P —Q 分解法具有线性收敛特性,与牛顿—拉夫逊法相比,当收敛到同样的精度时需要的迭代次数较多。
二、程序说明1.数据说明Branch1。
txt:支路参数矩阵第1列为支路的首端编号;第2列为支路的末端编号(首端编号小于末端编号);第3列为之路的阻抗;第4为支路的对地容抗;第5列为支路的变比;第6列为折算到那一侧的标志Branch2。
电力系统潮流计算牛顿拉夫迅法与PQ分解法通用MATLAB计算程序
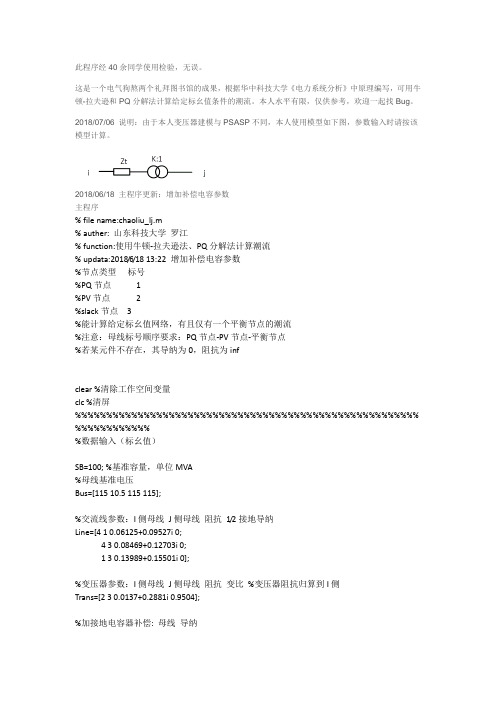
此程序经40余同学使用检验,无误。
这是一个电气狗熬两个礼拜图书馆的成果,根据华中科技大学《电力系统分析》中原理编写,可用牛顿-拉夫逊和PQ分解法计算给定标幺值条件的潮流。
本人水平有限,仅供参考,欢迎一起找Bug。
2018/07/06 说明:由于本人变压器建模与PSASP不同,本人使用模型如下图,参数输入时请按该模型计算。
2018/06/18 主程序更新:增加补偿电容参数主程序% file name:chaoliu_lj.m% auther: 山东科技大学罗江% function:使用牛顿-拉夫逊法、PQ分解法计算潮流% updata:2018/6/18 13:22 增加补偿电容参数%节点类型标号%PQ节点 1%PV节点 2%slack节点 3%能计算给定标幺值网络,有且仅有一个平衡节点的潮流%注意:母线标号顺序要求:PQ节点-PV节点-平衡节点%若某元件不存在,其导纳为0,阻抗为infclear %清除工作空间变量clc %清屏%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% %%%%%%%%%%%%%数据输入(标幺值)SB=100; %基准容量,单位MVA%母线基准电压Bus=[115 10.5 115 115];%交流线参数:I侧母线J侧母线阻抗1/2接地导纳Line=[4 1 0.06125+0.09527i 0;4 3 0.08469+0.12703i 0;1 3 0.13989+0.15501i 0];%变压器参数:I侧母线J侧母线阻抗变比%变压器阻抗归算到I侧Trans=[2 3 0.0137+0.2881i 0.9504];%加接地电容器补偿: 母线导纳Cap=[2 0.5i];%发电机参数:母线节点类型P V/U θGen=[4 3 1 0];%负荷参数:母线节点类型P Q%按参考方向,发电机发出功率(正值),负荷消耗功率(负值)Load=[1 1 -0.18 -0.06;2 1 -0.32 -0.12];mode=1; %1-极坐标下牛拉法,2-PQ分解法Tmax=50; %最大迭代次数limit=1.0e-4; %要求精度%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% %%%%%%%%%%%%%%变压器π型等效阻抗参数Zt=zeros(size(Trans,1),3);Zt(:,1)=Trans(:,3)./Trans(:,4);Zt(:,2)=Trans(:,3)./(1-Trans(:,4));Zt(:,3)=Trans(:,3)./(Trans(:,4).^2-Trans(:,4));Trans_pi=[Trans(:,1:2) Zt(:,1) 1./Zt(:,2) 1./Zt(:,3)];n=numel(Bus); %总节点数m=n-1; %PQ节点数for i=1:size(Gen,1)%数组行数if Gen(i,2)==2 %除去PV节点就是PQ节点m=m-1;endendfor i=1:size(Load,1)if Load(i,2)==2m=m-1;endend%PQ节点包含浮游节点,其PQ=0%提取P,Q,U向量P=zeros(1,n); %P,Q为原始数据,Pi,Qi为计算结果Q=zeros(1,n);U=ones(1,n); %电压初始值由此确定cita=zeros(1,n); %此处未知节点皆设为1.0∠0 %注意:此处角度单位为度,提取后再转换成弧度,后面计算使用弧度for i=1:size(Gen,1)if Gen(i,2)==1 %PQ节点P(Gen(i,1))=Gen(i,3);Q(Gen(i,1))=Gen(i,4);endif Gen(i,2)==2 %PV节点P(Gen(i,1))=Gen(i,3);U(Gen(i,1))=Gen(i,4);endif Gen(i,2)==3 %slack节点U(Gen(i,1))=Gen(i,3);cita(Gen(i,1))=Gen(i,4);endendfor i=1:size(Load,1)if Load(i,2)==1 %PQ节点P(Load(i,1))=Load(i,3);Q(Load(i,1))=Load(i,4);endif Load(i,2)==2 %PV节点P(Load(i,1))=Load(i,3);U(Load(i,1))=Load(i,4);endif Load(i,2)==3 %slack节点U(Load(i,1))=Load(i,3);cita(Load(i,1))=Load(i,4);endenddisp('初始条件:')disp('各节点有功:')disp(P);disp('各节点无功:')disp(Q);disp('各节点电压幅值:')disp(U);cita=(deg2rad(cita)); %角度转换成弧度disp('各节点电压相角(度):')disp(rad2deg(cita)); %显示依然使用角度%节点导纳矩阵的计算Y=zeros(n); %新建节点导纳矩阵y=zeros(n); %网络中的真实导纳%计算y(i,j)for i=1:size(Line,1) %与交流线联结的真实导纳ii=Line(i,1); jj=Line(i,2);y(ii,jj)=1/Line(i,3);y(jj,ii)=y(ii,jj);endfor i=1:size(Trans_pi,1) %与变压器联结的真实导纳ii=Trans_pi(i,1); jj=Trans_pi(i,2);y(ii,jj)=1/Trans_pi(i,3);y(jj,ii)=y(ii,jj);end%计算y(i,i)for i=1:size(Line,1) %与交流线联结的对地导纳ii=Line(i,1); jj=Line(i,2);y(ii,ii)=y(ii,ii)+Line(i,4);y(jj,jj)=y(jj,jj)+Line(i,4);endfor i=1:size(Trans_pi,1) %与变压器联结的对地导纳ii=Trans_pi(i,1); jj=Trans_pi(i,2);y(ii,ii)=y(ii,ii)+Trans_pi(i,4);y(jj,jj)=y(jj,jj)+Trans_pi(i,5);end%算上补偿电容for i=1:size(Cap,1)ii=Cap(i,1);y(ii,ii)=y(ii,ii)+Cap(i,2);end%由y计算Yysum=sum(y,1); %每一行求和for i=1:nfor j=1:nif i==jY(i,j)=ysum(i);elseY(i,j)=-y(i,j);endendenddisp('节点导纳矩阵:');disp(Y);G=real(Y); %电导矩阵B=imag(Y); %电纳矩阵%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% %%%%%%%%%%%%%%%%%%%%%以上为基础数据整理%接下来是牛拉法的大循环%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% %%%%%%%%%%%%%%%%%%%%%计算功率不平衡量[dP,dQ,Pi,Qi]=Unbalanced( n,m,P,Q,U,G,B,cita );disp('有功不平衡量:');disp(dP);disp('无功不平衡量:');disp(dQ);for i=1:Tmaxfprintf('第%d次迭代\n',i);%雅可比矩阵的计算if(mode==1)J=Jacobi( n,m,U,cita,B,G,Pi,Qi );disp('雅可比矩阵');disp(J);end%求解节点电压修正量if(mode==1)[dU,dcita]=Correct( n,m,U,dP,dQ,J );else[dU,dcita]=PQ_LJ( n,m,dP,dQ,U,B );enddisp('电压、相角修正量:');disp(dU);disp(rad2deg(dcita));%修正节点电压U=U+dU;cita=cita+dcita;disp('节点电压幅值:');disp(U);disp('节点电压相角:');disp(rad2deg(cita));%计算功率不平衡量[dP,dQ,Pi,Qi]=Unbalanced( n,m,P,Q,U,G,B,cita );disp('有功不平衡量:');disp(dP);disp('无功不平衡量:');disp(dQ);if (max(abs(dP))<limit && max(abs(dQ))<limit )break;end%ifend%for%迭代结束,判断收敛if (max(abs(dP))<limit && max(abs(dQ))<limit )disp('计算收敛');elsedisp('计算不收敛或未达到要求精度');end%打印功率fprintf('迭代总次数:%d\n', i);disp('节点电压幅值:');disp(U);disp('节点电压相角:');disp(rad2deg(cita));disp('有功计算结果:');disp(Pi);disp('无功计算结果:');disp(Qi);子程序一% filename:Unbalanced.m% author: 山东科技大学罗江% function: 计算功率不平衡量function [ dP,dQ,Pi,Qi ] = Unbalanced( n,m,P,Q,U,G,B,cita )%计算ΔPi有功的不平衡量for i=1:nfor j=1:nPn(j)=U(i)*U(j)*(G(i,j)*cos(cita(i)-cita(j))+B(i,j)*sin(cita(i)-cita(j)));endPi(i)=sum(Pn);enddP=P(1:n-1)-Pi(1:n-1); %dP有n-1个%计算ΔQi无功的不平衡量for i=1:nfor j=1:nQn(j)=U(i)*U(j)*(G(i,j)*sin(cita(i)-cita(j))-B(i,j)*cos(cita(i)-cita(j)));endQi(i)=sum(Qn);enddQ=Q(1:m)-Qi(1:m); %dQ有m个end%func子程序二% filename:Jacobi.m% author:山东科技大学罗江% function: 计算雅可比矩阵function [ J ] = Jacobi( n,m,U,cita,B,G,Pi,Qi )%雅可比矩阵的计算%分块H N K L%i!=j时for i=1:n-1for j=1:n-1H(i,j)=-U(i)*U(j)*(G(i,j)*sin(cita(i)-cita(j))-B(i,j)*cos(cita(i)-cita(j)));endendfor i=1:n-1for j=1:mN(i,j)=-U(i)*U(j)*(G(i,j)*cos(cita(i)-cita(j))+B(i,j)*sin(cita(i)-cita(j)));endendfor i=1:mfor j=1:n-1K(i,j)=U(i)*U(j)*(G(i,j)*cos(cita(i)-cita(j))+B(i,j)*sin(cita(i)-cita(j)));endendfor i=1:mfor j=1:mL(i,j)=-U(i)*U(j)*(G(i,j)*sin(cita(i)-cita(j))-B(i,j)*cos(cita(i)-cita(j)));endend%i==j时for i=1:n-1H(i,i)=U(i).^2*B(i,i)+Qi(i);endfor i=1:mN(i,i)=-U(i).^2*G(i,i)-Pi(i);endfor i=1:mK(i,i)=U(i).^2*G(i,i)-Pi(i);endfor i=1:mL(i,i)=U(i).^2*B(i,i)-Qi(i);end%合成雅可比矩阵J=[H N;K L];end子程序三% filename:Correct.m% author:山东科技大学罗江% function:修正节点电压function [ dU,dcita ] = Correct( n,m,U,dP,dQ,J )%求解节点电压修正量for i=1:mUd2(i,i)=U(i);enddPQ=[dP dQ]';dUcita=(-inv(J)*dPQ)';dcita=dUcita(1:n-1);dcita=[dcita 0];dU=(Ud2*dUcita(n:n+m-1)')';dU=[dU zeros(1,n-m)];end子程序四% filename:PQ_LJ.m% author:山东科技大学罗江% function:使用PQ分解法计算电压修正量function [ dU,dcita ] = PQ_LJ( n,m,dP,dQ,U,B )dP_U=dP./U(1:n-1);dQ_U=dQ./U(1:m);dUdcita=(-inv(B(1:n-1,1:n-1))*dP_U')';dcita=dUdcita./U(1:n-1);dU=(-inv(B(1:m,1:m))*dQ_U')';dU=[dU zeros(1,n-m)];dcita=[dcita 0];%补零end (使用时此括号删去。
牛顿拉夫逊法计算潮流步骤

牛顿拉夫逊法计算潮流步骤牛顿拉夫逊法(Newton-Raphson Method)是一种常用于计算潮流的数值求解方法。
它是基于潮流计算的功率流方程的非线性特性而设计的,通过迭代求解来逼近潮流计算的稳态解。
下面将介绍牛顿拉夫逊法计算潮流的基本步骤。
首先,我们需要明确潮流计算的目标,即确定电力系统中各节点的电压相角和幅值。
这些节点是电力系统中的发电机、负荷和交流输电线路的连接点。
通过潮流计算,我们可以得到各节点的电压相角和幅值,从而分析系统的功率分布、电压稳定性等运行特性。
接下来,我们需要建立电力系统的潮流计算模型。
这个模型中,我们需要考虑发电机的注入功率、负荷的吸收功率、线路的传输损耗等因素。
通过利用功率流方程,我们可以将这些因素表示为电压、功率和导纳之间的方程。
然后,我们需要进行初始化操作。
在进行牛顿拉夫逊法迭代计算之前,我们需要对电力系统的各节点进行初始电压值的设定。
这些初始值可以根据经验或者历史数据来得到,但需要满足物理约束条件,如一致性、电压幅值在合理范围内等。
接下来,我们进入迭代计算的过程。
首先,我们需要对系统的节点进行编号,然后选择某一节点作为基准节点,其他节点相对于基准节点的电压相角进行计算。
然后,我们根据节点注入功率和导纳矩阵的关系,得到节点注入电流。
接着,我们根据节点注入电流和电压相角的关系,计算各节点的电压相角和幅值的改变量。
在计算改变量后,我们需要对节点电压进行更新。
更新后,我们判断系统是否达到收敛条件。
如果满足收敛条件,则停止迭代,得到最终的潮流计算结果;如果不满足收敛条件,则继续进行下一轮迭代计算。
最后,我们对潮流计算结果进行分析和验证。
通过比较计算得到的结果和实际运行数据进行对比,我们可以评估潮流计算的准确性。
同时,我们还可以通过故障分析、电压稳定性评估等手段对电力系统进行优化和改进。
总而言之,牛顿拉夫逊法是一种常用的求解潮流计算问题的方法。
它通过迭代求解潮流计算的功率流方程,逼近潮流计算的稳态解。
P-Q分解法潮流计算解读

P-Q分解法的特点和性能分析
(1) 用一个n-1阶和一个m阶的线性方程组代替了 牛顿法的n-1+m阶线性方程组,显著地减少了内 存需求量及计算量。
(2)系数矩阵B’和B’’为常数矩阵。因此,不必像牛 顿法那样每次迭代都要形成雅可比矩阵并进行三 角分解,只需要在进入迭代过程以前一次形成雅 可比矩阵并进行三角分解形成因子表,然后反复 利用因子表对不同的常数项△P/V或△Q/V进行消 去回代运算,就可以迅速求得修正量,从而显著 提高了迭代速度。
在B'中尽量去掉那些对有功功率及电压相角影响 较小的因素,如略去变压器非标准电压比和输电 线路充电电容的影响;在B"中尽量去掉那些对无 功功率及电压幅值影响较小的因素,如略去输电 线路电阻的影响
即B’的非对角和对角元素分别按下式计算:
B”的非对角和对角元素分别按下式计算:
其中rij和xij分别为支路的电阻和感抗,bi0为节点i 的接地支路的电纳。(BX法)
由图2-3可以看出,牛顿法在开始时收敛得比较慢, 当收敛到一定程度后,它的收敛速度就非常快, 而P-Q分解法几乎是按同一速度收敛的。如果给 出的收敛条件小于图中A点相应的误差,那么P-Q 分解法所需要的迭代次数要比牛顿法多几次。可 以粗略地认为P-Q分解法的选代次数与精度的要 求之间存在着线性关系。
(3)系数矩阵B’和B’’是对称矩阵。因此,只需要 形成并贮存因子表的上三角或下三角部分,这 样又减少了三角分解的计算量并节约了内存。
P-Q分解法的收敛特性
P-Q分解法所采取的一系列简化假定只影响了修 正方程式的结构,也就是说只影响了 迭代过程, 并不影响最终结果。因为P-Q'分解法和牛顿法都 采用相同的数学模型式,最后计算功率误差和判 断收敛条件都是严格按照精确公式进行的,所以 P-Q分解法和 牛顿法一样可以达到很高的精度。
电力系统稳态分析--潮流计算
电力系统稳态分析摘要电力系统潮流计算是研究电力系统稳态运行情况的一种重要的分析计算,它根据给定的运行条件及系统接线情况确定整个电力系统各部分的运行状态:各母线的电压,各元件中流过的功率,系统的功率损耗。
所以,电力系统潮流计算是进行电力系统故障计算,继电保护整定,安全分析的必要工具。
本文介绍了基于MATLAB软件的牛顿—拉夫逊法和P—Q分解法潮流计算的程序,该程序用于计算中小型电力网络的潮流。
在本文中,采用的是一个5节点的算例进行分析,并对仿真结果进行比较,算例的结果验证了程序的正确性和迭代法的有效性。
关键词:电力系统潮流计算;MATLAB;牛顿—拉夫逊法;P-Q分解法;目次1 绪论 01.1背景及意义 01.2相关理论 01。
3本文的主要工作 (1)2 潮流计算的基本理论 (2)2。
1节点的分类 (2)2。
2基本功率方程式(极坐标下) (2)2.3本章小结 (3)3 潮流计算的两种算法 (4)3。
1牛顿—拉夫逊算法 (4)3.2PQ分解算法 (10)3。
3本章小结 (14)4 算例 (15)4.1系统模型 (15)4.2结果分析 (15)4。
3本章小结 (18)结论 (19)参考文献 (20)附录 (21)1 绪论1。
1背景及意义电力系统稳态分析是研究电力系统运行和规划方案最重要和最基本的手段。
电力系统稳态分析根据给定的发电运行方式和系统接线方式来确定系统的稳态运行状态,其中潮流计算针对电力系统的各种正常的运行方式进行稳态分析.潮流计算是根据给定的电网结构、参数和发电机、负荷等元件的运行条件,确定电力系统各部分稳态运行状态参数的计算.通常给定的运行条件有系统中各电源和负荷点的功率、枢纽点电压、平衡点的电压和相位角。
待求的运行状态参量包括电网各母线节点的电压幅值和相角,以及各支路的功率分布、网络的功率损耗等.电力系统潮流计算问题在数学上是一组多元非线性方程式求解问题,其解法都离不开迭代.潮流计算方法的改进过程中,经历了高斯-赛德尔迭代法、阻抗法、分块阻抗法、牛顿-拉夫逊法、改进牛顿法、P—Q分解法等。
牛顿拉夫逊法计算潮流步骤

牛顿拉夫逊法计算潮流步骤牛顿拉夫逊法(Newton-Raphson method)是一种用于求解非线性方程组的迭代方法,它可以用来计算电力系统潮流的解。
潮流计算是电力系统规划和运行中的重要任务,它的目标是求解电力系统中各节点的电压幅值和相角,以及线路的功率流向等参数,用于分析电力系统的稳定性和安全性,以及进行电力系统规划和调度。
下面是使用牛顿拉夫逊法计算潮流的一般步骤:步骤1:初始化首先,需要对电力系统的各个节点(包括发电机节点和负荷节点)的电压幅值和相角进行初始化,一般可以使用其中一种估计值或者历史数据作为初始值。
步骤2:建立潮流方程根据电力系统的潮流计算模型,可以建立节点电压幅值和相角的平衡方程,一般采用节点注入功率和节点电压的关系来表示。
潮流方程一般是一个非线性方程组,包含了各个节点之间的复杂关系。
步骤3:线性化方程组将潮流方程组进行线性化处理,一般采用泰勒展开的方法,将非线性方程组变为线性方程组。
线性化的过程需要计算雅可比矩阵,即方程组中的系数矩阵。
步骤4:求解线性方程组利用线性方程组的求解方法,比如高斯消元法或LU分解法等,求解线性方程组,得到电压幅值和相角的修正量。
步骤5:更新节点电压根据线性方程组的解,更新各个节点的电压幅值和相角,得到新的节点电压。
步骤6:检查收敛性判断节点电压的修正量是否小于设定的收敛阈值,如果满足收敛条件,则停止迭代;否则,返回步骤3,循环进行线性化方程组和线性方程组的求解。
步骤7:输出结果当潮流计算收敛时,输出最终的节点电压幅值和相角,以及线路的功率流向等参数。
牛顿拉夫逊法是一种高效、快速且收敛性良好的方法,广泛应用于电力系统潮流计算。
在实际应用中,可能会遇到多次迭代或者收敛性不好的情况,此时可以采用退火技术或其他优化算法进行改进。
此外,牛顿拉夫逊法的计算也可以并行化,利用多核处理器或者分布式计算集群来加速计算过程。
总之,牛顿拉夫逊法是一种重要的潮流计算方法,通过迭代计算逼近非线性方程组的解,可以得到电力系统中各节点的电压幅值和相角,用于分析电力系统的稳定性和安全性。
基于PQ分解法的潮流计算程序设计

基于PQ分解法的潮流计算程序设计摘要电力系统潮流计算,在实际的电力设计工作中是一种选择电气设备和选线的方法。
在具体的电力运转过程当中,主要功能是对运转模式进行明确,从而确定相应的维修与保养计划,同时为电压的统计、运行经济性统计、稳定性统计等给予相应的数据信息。
流量计算方法包括分析方法、手工计算和计算机算法。
手动算法适用于简单的电力系统,可以加深对物理概念的理解,并为计算机方法提供原始数据。
大多数实际的电力系统计算都使用计算机算法。
本文重点研究了基于P-Q分解法潮流计算的计算机算法。
P-Q分解是潮流计算中最常用的方法之一。
它主要来源于牛顿 - 拉夫森法当中的极坐标,是对该方法的简单化表达。
P-Q分解法的核心思路是通过极坐标的形式以电压矢量通过节点功率进行表达,从而对其中的核心冲突进行掌握,同时依据有功功率的偏差及无功功率的电压矢量进行调整。
在电压幅度的校正过程中,速度偏差是为其打基础的,此外有功及无功功率两者是分别进行升级的。
将其与现有的传统潮流计算方法进行比较。
该算法有效地提高了运算速度。
本文详细介绍了pq分解法的形成过程及其计算过程。
结合一个具有代表性的网络示例,采用p-q分解方法计算趋势。
然后,举一个例子,用MATLAB编程软件开发通用功率流计算程序。
该程序已调试和修改。
将已知参数输入程序并计算。
程序的准确度控制在0.01,结果通过迭代和输出获得。
迭代后给出了节点电压的振幅和相位角,并将通过各分支的有功功率和无功功率参考值与计算结果进行了比较。
通过比较可知,得到的电压和相角均在误差范围内。
结果表明,该程序是稳定的,分支电流误差略大。
通过对计算结果的分析,可以清楚地看到电压幅值不超过系统电压的 5%偏移极限,表明实际程序满足电力系统运行的要求,从而证明计算结果合理的。
最后,验证了该程序的有效性。
关键词: 电力系统潮流计算; P-Q分解法; MATLAB软件AbstractPower flow calculation is an important method to study the stable operation of power system. In the study of power system planning and design and existing power system operation modes, it is necessary to quantitatively analyze and compare the real-time operation modes of power supply schemes. Rationality, reliability and economy. In the operation of power system, it is used to determine the operation mode, formulate maintenance plan, and provide necessary data for voltage regulation calculation, economic operation calculation and stability calculation. The flow calculation method includes analysis method, manual calculation and computer algorithm. Manual algorithms are suitable for simple power systems, which can deepen the understanding of physical concepts and provide raw data for computer methods. Most practical power system calculations use computer algorithms. P-Q decomposition is one of the most commonly used methods in power flow calculation. It comes from the Newton Lawson method in polar coordinates. This is a simplification of the Newton Lawson method. The basic idea of P-Q decomposition method is to represent node power as polar coordinate equation of voltage vector, master the main contradictions, and correct voltage vector angle according to active power error and reactive power. It is compared with the existing traditional power flow calculation methods. The algorithm improves the operation speed effectively.The program has been debugged and modified. Input the known parameters into the program and calculate them. The accuracy of the program is controlled at 0.01, and the results are obtained by iteration and output. The amplitude and phase angle of node voltage are given after iteration, and the reference values of active power and reactive power ofeach branch are compared with the calculated results.it can be clearly seen that the voltage amplitude does not exceed the 5% offset limit of the system voltage, which shows that the actual program meets the requirements of the operation of the power system, thus proving the calculation results are reasonable. Finally, the validity of the program is verified.KEY WORDS: Power System Flow Calculation;P-Q Decomposition -Method;C-Free 5.0目录摘要 (1)第一章绪论 (6)1.1 课题背景 (6)1.2 潮流计算的意义 (7)1.3本次毕业设计的主要工作内容 (7)第二章潮流计算 (8)2.1潮流计算的目的 (8)2.2潮流计算的基本方程 (8)2.2.1 电力系统的组成 (8)2.2.2节点的分类 (9)2.2.3节点功率方程式 (9)2.3节点导纳矩阵 (10)2.4电力系统潮流计算方法 (12)2.4.1 高斯-赛德尔迭代法 (12)2.4.2潮流计算的牛顿法 (12)2.4.3 PQ分解法 (14)第三章基于P-Q分解法的潮流计算程序设计 (16)3.1 P-Q分解法潮流计算步骤 (16)3.2 P-Q分解法的潮流程序设计框图 (16)3.3 程序编译语言介绍 (18)3.3变量的定义 (18)3.3.1原始数据规定 (18)3.3.2节点信息变量的定义 (19)3.3.3节点导纳矩阵的定义 (19)3.3.4支路信息变量的定义 (19)3.3.5其他变量的定义 (20)3.4程序分模块设计 (20)3.4.1主程序的设计 (20)3.4.2子程序的设计 (21)第四章程序有效性的验证 (23)4.1实际例子及其参考参数 (23)4.2实际程序计算出的结果 (24)4.3结果比较与分析 (26)4.4 程序的不足 (26)参考文献 (27)致谢 ................................................................................................................... 错误!未定义书签。
电力系统潮流分析与计算设计(P Q分解法)

电力系统潮流分析与计算设计(P Q分解法)电力系统潮流分析与计算设计(p-q分解法)摘要潮流排序就是研究电力系统的一种最基本和最重要的排序。
最初,电力系统潮流排序就是通过人工手算的,后来为了适应环境电力系统日益发展的须要,使用了交流排序台。
随着电子数字计算机的发生,1956年ward等人基本建设了实际可取的计算机潮流排序程序。
这样,就为日趋繁杂的大规模电力系统提供更多了极其有力的排序手段。
经过几十年的时间,电力系统潮流排序已经发展得十分明朗。
潮流排序就是研究电力系统稳态运转情况的一种排序,就是根据取值的运转条件及系统接线情况确认整个电力系统各个部分的运转状态,例如各母线的电压、各元件中穿过的功率、系统的功率损耗等等。
电力系统潮流排序就是排序系统动态平衡和静态平衡的基础。
在电力系统规划设计和现有电力系统运转方式的研究中,都须要利用电力系统潮流排序去定量的比较供电方案或运转方式的合理性、可靠性和经济性。
电力系统潮流计算分为离线计算和在线计算,离线计算主要用于系统规划设计、安排系统的运行方式,在线计算则用于运行中系统的实时监测和实时控制。
两种计算的原理在本质上是相同的。
实际电力系统的潮流技术主要使用pq水解法。
1974年,由scottb.在文献(@)中首次提出pq分解法,也叫快速解耦法(fastdecoupledloadflow,简写为fdlf)。
本设计就是使用pq水解法排序电力系统潮流的。
关键词:电力系统潮流排序pq水解法第一章概论1.1详述电力系统潮流计算是研究电力系统稳态运行情况的一种计算,它是根据给定的运行条件及系统接线情况确定整个电力系统各个部分的运行状态,如各母线的电压、各元件中流过的功率、系统的功率损耗等等。
电力系统潮流计算是计算系统动态稳定和静态稳定的基础。
在电力系统规划设计和现有电力系统运行方式的研究中,都需要利用电力系统潮流计算来定量的比较供电方案或运行方式的合理性、可靠性和经济性。
9P-Q分解法潮流计算
⎡ ΔP ( 0 ) ⎤ ⎡ H N ⎤ ⎡ Δδ ( 0 ) ⎤ =⎢ ⎢ ⎥⎢ (0) ⎥ (0) (0) ⎥ ⎣ ΔQ ⎦ ⎣ J L ⎦ ⎣ ΔU U ⎦
解出
⎡ Δδ ( 0 ) ⎤ ⎢ (0) ⎥ ⎣ ΔU ⎦
–
– –2009-5-18 计算平衡节点功率、PV节点无功以及线路传输功率。 复杂电力系统潮流计算
Yij = G − j ( B + B f ) +
2009-5-18
1 1 1 + j2Bf j2Bf
= G − jB
5
牛顿-拉夫逊法潮流计算
PV节点:已知P、U ,待求量为Q、δ 因为PV节点的电压给定,故 ΔU 为零,该方程不 需要列出。第 k 次迭代时,功率不平衡量
Δ Pi
(k)
= f
n
(k) Pi
( ( = Pi − ∑ U i( k )U (j k ) (Gij cos δ ij k ) + Bij sin δ ij k ) ) j =1
⎡δ (1) ⎤ ⎡δ (0 ) ⎤ ⎡ Δδ (0 ) ⎤ 计算各点电压的新值 ⎢ = ⎢ (0 ) ⎥ − ⎢ (1) ⎥ (0 ) ⎥ ⎣U ⎦ ⎣U ⎦ ⎣ ΔU ⎦ 迭代至收敛,即 Δ U < ε 和 Δ δ < ε
3
修正方程
⎡ ΔP1 ⎤ ⎡ H11 ⎢ ⎥ ⎢ ΔP2 ⎥ ⎢ H 21 ⎢ ⎢L ⎥ ⎢L ⎢ ⎥ ⎢ ⎢ ΔPn ⎥ = ⎢ H n1 ⎢ ΔQ ⎥ ⎢ J ⎢ 1 ⎥ ⎢ 11 ⎢ ΔQ2 ⎥ ⎢ J 21 ⎢L ⎥ ⎢ ⎢ ⎥ ⎢L ⎢ ΔQn ⎥ ⎢ J n1 ⎣ ⎦ ⎣ H12 L H1n N 11 H 22 L H 2n N 21 H n 2 L H 1 n N n1 J 12 L J 1 n J 22 L J 2n J n 2 L J nn L11 L21 Ln1 N 12 L N 1 n ⎤ ⎥ N 22 L N 2n ⎥ ⎥ ⎥ N 22 L N nn ⎥ L12 L L1 n ⎥ ⎥ L22 L L2n ⎥ ⎥ ⎥ Ln 2 L Lnn ⎥ ⎦ ⎡ Δδ 1 ⎤ ⎢ ⎥ Δδ 2 ⎥ ⎢ ⎢ L ⎥ ⎢ ⎥ ⎢ Δδ n ⎥ ⎢ ΔU U ⎥ ⎢ 1 1⎥ ⎢ ΔU 2 U 2 ⎥ ⎢L ⎥ ⎢ ⎥ ⎢ ΔU n U n ⎥ ⎣ ⎦
PQ分解法潮流计算
否
是
K01=0?
K01=0,t=t+1 否
K01=1
ERM(1)< ε& ERM(,功率误差的 数值。EMP,寄 存器迭代过程中
最大功率误差。 K01是0时为有功 功率,K01是1时 为无功功率。
Hij ViVj (Gij sin ij Bij cosij ) Nij ViVj (Gij cosij Bij sin ij ) M ij ViVj (Gij cosij Bij sin ij ) Lij ViVj (Gij sin ij Bij cosij )
化简为
Hij ViVj Bij (i, j 1, 2, , n 1) Lij ViVj Bij (i, j 1, 2, , m)
将上式代入 可得到
P H
Q L(V / V )
在实际的P-Q分解法中,两个修正方程的系数矩 阵并不相同,一般可以写为
H VBV L VBV 式中:V是由各节点电压幅值组成的对角阵。由 于PV节点的存在, B’及B”的阶数不同,分 别为n-1阶和m阶。(m<n-1)
由图2-3可以看出,牛顿法在开始时收敛得比较慢, 当收敛到一定程度后,它的收敛速度就非常快, 而P-Q分解法几乎是按同一速度收敛的。如果给 出的收敛条件小于图中A点相应的误差,那么P-Q 分解法所需要的迭代次数要比牛顿法多几次。可 以粗略地认为P-Q分解法的选代次数与精度的要 求之间存在着线性关系。
P-Q分解法的修正方程式为
P / V B
Q / V BV
通过这一步简化,修正方程式中的系数矩阵B'和 B"由节点导纳矩阵的虚部构成,从而是常数对称 矩阵。其区别只是阶数不同,矩阵B'为n -1阶, 不含平衡节点对应的行和列,矩阵B"为m阶,不 含平衡节点和PV节点所对应的行和列。但在实际 P-Q分解法程序中,为了提高收敛速度,对B'与 B"的构成作了下面一些修改:
P-Q分解法潮流计算
化简为
H ij VV i j Bij Lij VV i j Bij (i, j 1, 2,, n 1) (i, j 1, 2,, m)
将上式代入
可得到
Байду номын сангаас
P H Q L(V / V )
在实际的P-Q分解法中,两个修正方程的系数矩 阵并不相同,一般可以写为
H ij VV i j (Gij sin ij Bij cos ij ) Nij VV i j (Gij cos ij Bij sin ij ) M ij VV i j (Gij cos ij Bij sin ij ) Lij VV i j (Gij sin ij Bij cos ij )
(1)一般情况下,线路两端电压的相角差不大(不 超过10°~20°),因此可以认为
cos ij 1,
Gij sin ij Bij
(2)与系统各节点无功功率相对应的导纳 通常远小于该节点自导纳的虚部 ,即
B Li Qi 2 Bii Vi
Qi Vi2Bii
考虑到上述关系,略去相关项可将系数矩阵
P-Q分解法潮流计算
P-Q分解法潮流计算
PQ分解法是由极坐标形式的牛顿法演 化而来,以有功功率作为修正电压向 量角度的依据,以无功功率作为修正 电压幅值的依据,把有功功率和无功 功率迭代分开进行。
一、P-Q分解法的基本原理
极坐标形式的牛顿潮流算法的修正方程为
P H Q M
P-Q分解法改变了牛顿法 迭代公式的结构,就改变 了迭代过程的收敛特性。 事实上,依一个不变的系 数矩阵进行非线性方程组 的迭代求解,在数学上属 于“等斜率法”,其选代过程是按几何级数收敛的,若画 在对数坐标系上,这种收敛特性基本上接近一条直线。而 牛顿法是按平方收敛的,在对数坐标纸上基本上是一条抛 物线,如图2-3所示。
PQ分解法

目录前言........................................................................................................................... - 1 -一、PQ分解法的极坐标表示及简化算法....................................................... - 2 -二、PQ分解法的直角坐标解法........................................................................ - 8 -三、基于因子表法的PQ分解法..................................................................... - 10 -四、PQ分解法潮流计算的简化算法.............................................................. - 11 -五、小结........................................................................................................... - 14 - 参考文献................................................................................................................. - 16 -前言潮流计算是电力系统中的一种最基本计算,通过已给定的运行条件确定系统中的运行状态,如各条母线上的电压、网络中的功率分布及功率损耗等。
电力系统中常用的PQ分解法派生于以极坐标表示的牛顿—拉夫逊法,其基本思想是把节点功率表示为电压向量的极坐标形式,以有功功率误差作为修正电压向量角度的依据,以无功功率误差作为修正电压幅值的依据,把有功和无功分开进行迭代其'代替原主要特点是以一个(n-1)阶和一个m阶不变的、对称的系数矩阵BB'',来的(n+m-2)阶变化的、不对称的系数矩阵M,以此提高计算速度,降低对计算机贮存容量的要求。
第四章 PQ分解法潮流计算

j¹i
极坐标形式的修正方程式(重新排序)
(n1)
é DP1 ù é H11 H12 L H1p H1n M N11 N12 L
ê ê
D P2
ú ú
ê ê
H
21
H 22
L H2p
H2n
M
N21 N22 L
ù é Dd1 ù
úê úê
Dd 2
ú ú
êMú ê
L
M
L úê M ú
ê ê
D Pp
ú ú
ê ê
N22 M H2 p L22 M J 2 p
H2n J2n
ú ú ú
ê ê ê
Dd 2 DU2 /U
2
ú ú ú
êMú ê
L
M
L
úê
ú
ê ê
L
ú ú
=
ê ê
L
L
L
L
M
L
LL
L
L úú
ê ê
L
ú ú
2(nm )
PV节点
ê ê
DPp
ú ú
ê ê
H
p1
N p1
H p2
N p2
M H pp
雅可比矩ê 阵:ú ê
网
自学内容
n 稀疏技术 n 压缩存储 n 节点编号优化 n 高斯消去法 n 因子表法
\
ì í î
Pi Qi
= =
eiai + fiai -
f i bi eibi
极坐标形式的功率方程(电压用相量表示):
å å Pi - jQi = UiÐ -qi (Gij + jBij )U jÐq j = Ui (Gij + jBij )U j (cosqij - j sinqij )
PQ分解法
目录前言........................................................................................................................... - 1 -一、PQ分解法的极坐标表示及简化算法....................................................... - 2 -二、PQ分解法的直角坐标解法........................................................................ - 8 -三、基于因子表法的PQ分解法..................................................................... - 10 -四、PQ分解法潮流计算的简化算法.............................................................. - 11 -五、小结........................................................................................................... - 14 - 参考文献................................................................................................................. - 16 -前言潮流计算是电力系统中的一种最基本计算,通过已给定的运行条件确定系统中的运行状态,如各条母线上的电压、网络中的功率分布及功率损耗等。
电力系统中常用的PQ分解法派生于以极坐标表示的牛顿—拉夫逊法,其基本思想是把节点功率表示为电压向量的极坐标形式,以有功功率误差作为修正电压向量角度的依据,以无功功率误差作为修正电压幅值的依据,把有功和无功分开进行迭代其'代替原主要特点是以一个(n-1)阶和一个m阶不变的、对称的系数矩阵BB'',来的(n+m-2)阶变化的、不对称的系数矩阵M,以此提高计算速度,降低对计算机贮存容量的要求。
潮流计算的基本算法及使用方法

潮流计算的基本算法及使用方法潮流计算的基本算法及使用方法一、潮流计算的基本算法1. 牛顿-拉夫逊法1.1 概述牛顿-拉夫逊法是目前求解非线性方程最好的一种方法。
这种方法的特点就是把对非线性方程的求解过程变成反复对相应的线性方程求解的过程,通常称为逐次线性化过程,就是牛顿-拉夫逊法的核心。
牛顿-拉夫逊法的基本原理是在解的某一邻域的某一初始点出发,沿着该点的一阶偏导数——雅可比矩阵,朝减小方程的残差的方向前进一步,在新的点上再计算残差和雅可矩阵继续前进,重复这一过程直到残差达到收敛标准,即得到了非线性方程组的解。
因为越靠近解,偏导数的方向越准,收敛速度也越快,所以牛顿法具有二阶收敛特性。
而所谓“某一邻域”是指雅可比方向均指向解的围,否则可能走向非线性函数的其它极值点,一般来说潮流由平电压即各母线电压(相角为0,幅值为1)启动即在此邻域。
1.2 一般概念对于非线性代数方程组()0=x f即 ()0,,,21=n i x x x f ()n i ,2,1= (1-1)在待求量x 的某一个初始计算值()0x附件,将上式展开泰勒级数并略去二阶及以上的高阶项,得到如下的线性化的方程组()()()()()0000=?'+x x f x f (1-2)上式称之为牛顿法的修正方程式。
由此可以求得第一次迭代的修正量()[]()()0100x f x f x -'-=? (1-3)将()0x ?和()0x相加,得到变量的第一次改进值()1x 。
接着再从()1x 出发,重复上述计算过程。
因此从一定的初值()0x出发,应用牛顿法求解的迭代格式为()()()()()k k k x f x x f -=?' (1-4)()()()k k k x x x ?+=+1 (1-5)上两式中:()x f '是函数()x f 对于变量x 的一阶偏导数矩阵,即雅可比矩阵J ;k 为迭代次数。
由式(1-4)和式子(1-5)可见,牛顿法的核心便是反复形成求解修正方程式。
潮流计算的基本算法及使用方法

潮流计算的基本算法及使用方法一、 潮流计算的基本算法1. 牛顿-拉夫逊法1.1 概述牛顿-拉夫逊法是目前求解非线性方程最好的一种方法。
这种方法的特点就是把对非线性方程的求解过程变成反复对相应的线性方程求解的过程,通常称为逐次线性化过程,就是牛顿-拉夫逊法的核心。
牛顿-拉夫逊法的基本原理是在解的某一邻域内的某一初始点出发,沿着该点的一阶偏导数——雅可比矩阵,朝减小方程的残差的方向前进一步,在新的点上再计算残差和雅可矩阵继续前进,重复这一过程直到残差达到收敛标准,即得到了非线性方程组的解。
因为越靠近解,偏导数的方向越准,收敛速度也越快,所以牛顿法具有二阶收敛特性。
而所谓“某一邻域”是指雅可比方向均指向解的范围,否则可能走向非线性函数的其它极值点,一般来说潮流由平电压即各母线电压(相角为0,幅值为1)启动即在此邻域内。
1.2 一般概念对于非线性代数方程组即 ()0,,,21=n i x x x f ()n i ,2,1= (1-1)在待求量x 的某一个初始计算值()0x附件,将上式展开泰勒级数并略去二阶及以上的高阶项,得到如下的线性化的方程组()()()()()0000=∆'+x x f x f (1-2)上式称之为牛顿法的修正方程式。
由此可以求得第一次迭代的修正量()()()[]()()0100x f x f x -'-=∆ (1-3)将()0x∆和()0x相加,得到变量的第一次改进值()1x。
接着再从()1x出发,重复上述计算过程。
因此从一定的初值()0x出发,应用牛顿法求解的迭代格式为()()()()()k k k x f x x f -=∆' (1-4)()()()k k k x x x ∆+=+1 (1-5)上两式中:()x f '是函数()x f 对于变量x 的一阶偏导数矩阵,即雅可比矩阵J ;k 为迭代次数。
由式(1-4)和式子(1-5)可见,牛顿法的核心便是反复形成求解修正方程式。