基于单片机的点焊机控制器系统设计
点焊机器人控制系统毕业设计

点焊机器人控制系统毕业设计一、选题背景及意义随着现代制造业的快速发展,自动化生产已经成为了制造业的主流趋势。
而点焊机器人作为其中的重要设备之一,在汽车、家电等行业中得到了广泛应用。
点焊机器人可以提高生产效率,降低生产成本,保证产品质量,减少人力资源浪费等方面具有重要意义。
因此,设计一套点焊机器人控制系统是非常有必要的。
该系统可以实现对点焊机器人的精准控制,提高其工作效率和稳定性,同时也可以提高操作安全性和减少操作难度。
二、设计目标本设计旨在设计一套全自动化的点焊机器人控制系统,实现以下目标:1. 实现对点焊机器人的精准控制,并能够自动完成多种复杂任务。
2. 提高点焊机器人的工作效率和稳定性,并保证产品质量。
3. 提高操作安全性和减少操作难度。
三、设计方案1. 系统框架本系统采用分布式控制结构,包括上位机、下位机和PLC三个部分。
其中上位机主要负责图形界面的显示和操作,下位机主要负责点焊机器人的运动控制,PLC主要负责点焊机器人的输入输出控制。
2. 硬件设计本系统采用单片机作为下位机控制芯片,并配合步进电机和直流电机实现点焊机器人的运动控制。
同时,为了保证系统的稳定性和可靠性,还需要加入各种传感器、电源、开关等辅助设备。
3. 软件设计本系统采用Visual Studio作为上位机软件开发工具,使用C#语言编写程序。
下位机采用Keil C51进行编程。
PLC则采用三菱公司的GX Works 2进行编程。
4. 功能设计本系统具有以下功能:(1)图形化界面:通过上位机可以实现对点焊任务的设置、调试和监控等操作。
(2)自动化控制:通过上位机设置任务参数后,下位机可以自动完成点焊任务。
(3)故障检测:系统具有故障检测功能,在发生故障时能够及时报警并停止运行。
(4)数据存储:系统可以将每次点焊任务的数据进行记录,并保存到数据库中。
四、总结本设计提出了一套全自动化的点焊机器人控制系统,实现了对点焊机器人的精准控制,提高了其工作效率和稳定性,并保证了产品质量。
焊机控制系统设计及其应用

焊机控制系统设计及其应用随着科技的不断发展,精密制造工业已经成为现代工业的重要组成部分之一。
在这个领域之中,焊接是最常用的工艺之一,可以在汽车制造、桥梁建设、船舶制造、航天航空和电子制造等领域中得到广泛应用。
控制系统在焊接的过程中也扮演着至关重要的角色,通过对焊接设备的参数进行控制,实现焊接过程中的自动化操作、优化控制和快速反应。
本文将着重讨论焊机控制系统设计及其应用,为读者深入了解这个领域提供一些参考。
一、系统设计1. 基本原理焊接控制系统主要用于控制焊枪内的电流,焊接过程中的温度、传感器反馈等参数。
焊机控制系统的基本原理是在焊接过程中通过调整焊枪内部电流波形,控制焊接过程中的电势差、电流、电弧长度、温度等参数。
在焊接过程中,电路板会根据传感器的反馈来进行修正和调整。
2. 控制电路控制电路是焊机控制系统中最重要的部分,它决定了焊接过程中的电流、电压、电弧长度等关键参数。
在常规的焊接设备中,控制器主要由两个模块组成:电流传感器和调节器。
调节器的主要功能是对电路中的电流和电压进行调节,而电流传感器则用于检测电路中的电流强度和幅度。
3. PLC编程在现代的焊接控制系统中,往往使用可编程逻辑控制器(PLC)进行编程。
PLC最常用于焊接操作程序的编写和调试,可根据不同的焊接需求、焊接参数和检测表现来进行编程。
PLC程序可用于控制焊接电极的转动、位置修正等功能,提高焊接效率和质量。
二、应用研究1. 焊接质量控制焊接质量控制是焊接过程中最重要的问题之一。
通过使用焊机控制系统,可以实现对焊接过程中的电路参数、传感器反馈、反馈环路和电路修正等关键部分的控制。
因此,可以减少焊接过程中的不良品率、焊接受创面、线熔点位置等问题,从而提高焊接质量和寿命。
2. 机器人焊接在许多大规模生产过程中,通常会使用机器人进行自动化焊接。
机器人焊接在优化焊接过程、提高生产效率和减少人工干预方面具有很大优势。
使用焊机控制系统进行机器人焊接会得到更高的生产效率和更高的产品质量。
基于PIC单片机的电阻焊机系统的设计.
本科毕业设计说明书基于PIC单片机的电阻焊机的控制系统设计THE SYSTEM OF RESISTANCE WELDER CONTROLLERBASED ON PIC学院(部):电气与信息工程学院专业班级:电气工程及其自动化学生姓名:林幸福指导教师:杨岸副教授2012 年5 月12 日基于PIC单片机的电阻焊机的控制系统设计摘要本文主要设计一个基于单片机芯片PIC16F1947的电阻焊机控制系统。
根据设定的焊接热量,单片机进行数据采集,运算处理,再控制晶闸管(SCR)的导通角,来实现焊机焊接时的焊接温度的控制。
本系统由过零信号电路,面板显示设置电路,脚踏触发电路,脉冲控制电路,气阀控制电路及单片机系统电路构成。
关键词:电阻焊机,晶闸管(SCR),PIC16F1947单片机THE SYSTEM OF RESISTANCE WELDER CONTROLLERBASED ON PICABSTRACTThis thesis to design a single chip PIC16f1947-base resistance welding machinecontrol system.According to the srtting of the welding heat,the microcontroller for data acquisition,computing processing,to control the conduction angle of the thyristor (SCR)to achieve the temperature of the welder when welding.The system consists of dataacquisition circuit,a zero-signal circuit panel display setting circuit,foot to the startingcircuit,the pulse control circuit,the valve control circuit and microcontroller system circuit.KEYWORDS:resistance welding machine, thyristor (SCR),PIC16F1947 microcontroller目录摘要(中文) (I)ABSTRACT .......................................................... I I 1 绪论 . (1)1.1 电阻焊的介绍 (1)1.1.1 电阻焊定义 (1)1.1.2 电阻焊优点 (1)1.1.3 电阻焊缺点 (1)1.2 电阻焊基本原理: (2)1.2.1 焊接热的产生及影响产热的因素 (2)1.2.2 电阻R及影响R的因素 (2)1.2.3 焊接电流的影响 (3)1.2.4 焊接时间的影响 (4)1.2.5 电极压力的影响 (4)1.2.6 电极形状及材料性能的影响 (4)1.2.7 工件表面状况的影响 (4)1.2.8 热平衡、散热及温度分布 (5)1.2.9 系统研究的方向 (6)2 系统硬件设计 (8)2.1 系统硬件框图和接线图 (8)2.1.1 系统控制对象 (8)2.1.2 系统方框图 (8)2.1.3 系统控制器与系统控制对象的接线图 (9)2.2 晶闸管介绍 (9)2.2.1 概述 (9)2.2.2 晶闸管的结构与工作原理 (10)2.2.3 晶闸管的基本特性 (11)2.2.3.1 静态特性 (11)2.2.3.2 动态特性 (13)2.3 核心板 (14)2.3.1 单片机最小系统 (14)2.3.2 可控硅驱动电源电路 (15)2.3.3 单片机电源电路 (16)2.3.4 气阀脚踏电源回路 (18)2.3.5 电压过零检测回路 (18)2.3.6 脚踏开关回路 (20)2.3.7 气阀驱动回路 (21)2.3.8 可控硅控制回路 (22)2.3.9 报警电路 (24)2.4 面板 (24)2.4.1 矩阵键盘 (24)2.4.2 串转并接口 (25)2.4.3 面板总图 (26)3 系统软件介绍 (28)3.1 开发环境的介绍 (28)3.2 总流程图的介绍 (29)3.3 定时器0的介绍 (30)3.4 定时器1的介绍 (31)3.5 定时器2的介绍 (32)3.6 电平变化中断的介绍 (32)结论 (35)参考文献 (36)附录 (37)致谢 (44)1 绪论1.1 电阻焊的介绍1.1.1 电阻焊定义电阻焊是将被焊工件压紧于两电极之间,并通以电流,利用电流流经工件接触面及邻近区域产生的电阻热将其加热到熔化或塑性状态,使之形成金属结合的一种方法。
基于PIC单片机焊接跟踪器控制系统设计

子程 序模 块 ,运 行 过程 中通 过 主程序 调用 功能 子 要求 。
一
4 — 5
一
图 1 跟 踪 器 系 统 工作 原 理
图 2 主程 序 流程 图
‘
.
一
』
_ ¨
1
I
’ _ L J
— 1
■一
i
。 . I
! 1 _ _ _ ’
}
图 3 伺服 电机 闭环 控 制 方 框 图 6 结论 6 以 P C 6 8 7为 . 1 I 1F 7
艇, 以及各种金属结构等=业部门. 工 可以预言, 示。 当启动 程序 时 , 片机 立 即进行 各 个端 口的 单 推动我国经济建设和发展科学事业上 ,焊接技术 初始化 工作 , 初始化完成后, 单片机控制系统处 将起 到重要 的作 用I “ 。电弧焊 是焊接 结构 生产 中 的 于待命状态, 等待开关按下。一旦开关按下 , 电 主要 焊接 工艺 方法 ,其 应用 量 占所有 焊接 生 产量 源接通 , 调用参数读人子程序 , 即读入预先设定 的 7%以上 。目前 , 国的焊 接 自动化 水平 与发达 的焊接 速度 、 枪对 中参 数等 。然 后 , 照读 入 5 我 焊 按 国家相 比还有 ・ 差距 ,因此 实现焊 接 过程 自动 的焊接 速 度 、 枪对 中参 数开 始进行 焊接 。 定 焊 在正 具有 非常 大的经 济和社 会意 义口 现在 应用 于焊缝 常焊接 过程 中, 时检测 行走 速度 、 枪对 中参 实 焊 跟 踪系统 的两 大 主流传 感器 类 型是 电弧 式传 感器 数等 参数 的变化 , 以便 随时调 整焊 接速 度 、 焊枪 和激光传感器。电弧式传感器直接检测电弧的电 对 中性 焊接完 成 后 ,控 制器输 出停 止焊 接信 流 和电压 , 测 点和焊 接 点是 同 一个位 置 , 需 存 号 , 检 无 跟踪 器停止 工作 。 焊枪 上添 加辅 助设 备 ,实 时性好 ,不怕 电弧 的 飞 5 系统 的稳 定 『 生分析 。 存本 控制 系统 中 , 无 溅、 烟尘 、 光等 影 响 , 本低 , 到 r广 泛 应 用 论是 步进 电机还 是育 流伺 服 电机在某 些情 况下 弧 成 得 但 由于 电弧 传感 器的 系统 只有 在 电弧点 燃后 才 能 可能存在振荡和失步的现象,为实现对焊缝跟 工作. 在跟踪 过 程 中要 进 行跟踪 或 旋转 , 且只适 踪盼h速反映及精确定位 , 而 夹 减少误差, 保证焊缝 便 冈此 , 本焊 接 跟踪 用 于对称 接头 的丁件 , 用范 围有 限 : 应 随着传 感 技 质 量 , 于焊 接 小车 的启 停 , 。以伺 服 电机闭 环控 制为例 术 的发展 ,激 光传 感器 彳焊 缝跟 踪过 程 中得 到 了 系统 采用 闭环控 制日 F 广泛 应用 。利用激 光传 感技 术来 获取 焊 缝特 征信 分析 该系统 的稳 老 陛 。伺 服 电机闭 ̄- 制 方框 r 4 g 息 , 有 信息 量 大 、 ] 件不 接 触 、 敏 度 和精 确 图 如 3图所 示 。在 图 3中 ,. 具 与 _ 灵 K 为处 理 电路 的放 K× k 度高、 电磁干扰能力强等优点 , 抗 适合各种坡 口形 大系数 , K 为电压放倍数 , 为反馈的放 由伺 在 状 ,而且可以同时进行焊缝跟踪控制和焊接质量 大 系数 ; 服 电机 的静 态抒 陛可知 , 电机 加 负 电机存在着死区, 因而伺眼电机 的数 的控制, 是最具有发展前途的传感技术。因而设汁 载的情况下, 个以 中等 性能 的 8 单 片机 PC单 片机 为核 心 学模 型 实际 h 一个 非线 性 环节 ,但在 不影 响 系 位 I 是 一 传递函数可简化为 的控制 系统 ,实现 对 焊接跟 踪 器行 走速 度和 纠偏 统稳老 的前提下 , 处 理的精 确 、 速控 制有 着很 强的现 实意 义: 快 本研 ( s c +) 1 究采用激光传感器作为信息采集元件,将性价比 式 中: 卜— 机 转角 的拉 氏变换 ;as ( s U (卜一 高 、抗干 扰能 力强 的 PC 单片机 引入 到焊枪 跟 踪 I 器 中 , 程序 软件 实现 跟踪 器 的速 度凋 节 、 偏 电枢 电压 自{ 通过 纠 勺 氏变换 ;n —朝 l时 间常数。 Tr 械 处理的数字化控制, 以降低控制电路的复杂性 、 增 由图 3 可以求得系统的开环传递函数为 K 、 T X X 强 L 呵靠性 。 作 w 一 ! 一 ¨ S 2焊接跟踪器T作原理。焊缝 自动跟踪系统 ” +I ) ( 丽 般由检测机构( 激光传感器)信息处理系统 、 、 控 T 一 j, 中 , 一 KKK 其 丽 ,, ̄ r 制器、 跟踪执 行机 构和调 整机 构组 成 . 焊接过 程 . 存 i 。 中检测机构( 激光传感器 ) 不断检测有关焊缝 中心 般 闭环 系统 的传 递 函数为 位 置 的信息 , 后输 出控 制信 号 , 然 当焊枪  ̄ I 女 tt 『 , r性 ) = 时 ,执 行机 构根 据得 到 的控制 信号 产 生所需 的预 设 该系统 传递 函数 的 分 母等 于 零 ,即可得 出 定运 动 ; 枪 对 中性 不好 时 , 测 机构 ( 光 传 系统 的特征 方程 1 H( =0 当焊 检 激 +G( ) ) 感器 )将采集到信 号通过信号处理系统传给控制 系统的稳定陛决定于特征方程 ,特征方程的 器( 单片机) 辱信号传给调整机构对焊枪的位置 根落任『 平面的左半部分, 再I c 腹 系统是稳定的。 进行对中调整, 实现焊缝的实时跟踪。这其中, 信 将I 节的开环传递函数写为根的形式为 息处理机构起着至关重要的作用 ,它直接决定着 其 中 一 。 输 出信号的正确与否,从而影响执行机构的焊缝 由系统 的开 环传 递 函数 可知 ,该 系 统 为 I 型 跟 踪精 度 。系统工 作原 理如 图 1 所示 : 系统 , 有j 个开 环极点 , 有零 点 。 没 其根轨 迹 如图 4 3系统硬件设计。 根据跟踪器的控制要求, 要 陔系统 的开 环极 点 中有 一个 求 该 系统实 现具有 功能 :行 走速 度显 示 电路 ;. a h 信 所 示 。由根轨 迹可 知 , 因而系统属于临界稳定状态。 要使系 息采样 电路 ; 服 电机驱 动 电路 ( 走电路 )d 伺 行 ;. 步 与虚轴相交 , 统达到稳定状态的条件是使 K 。又由于 T> , ≯O 0 进电机驱动电路( 焊枪对中控制 ) 。 都大于零就能使系统达到稳定 T 4系统软什谢 { ‘ 。本设计中控制软件采用模 所 以只要使 T、 经 能 块化设 汁方法 ,以主程 序为 核心设 置 了许 多功 能 状 态 。 过实 验测 试该 系统稳 定 的 , 够满 足实 际
一种交流电焊机节能保护控制器的设计

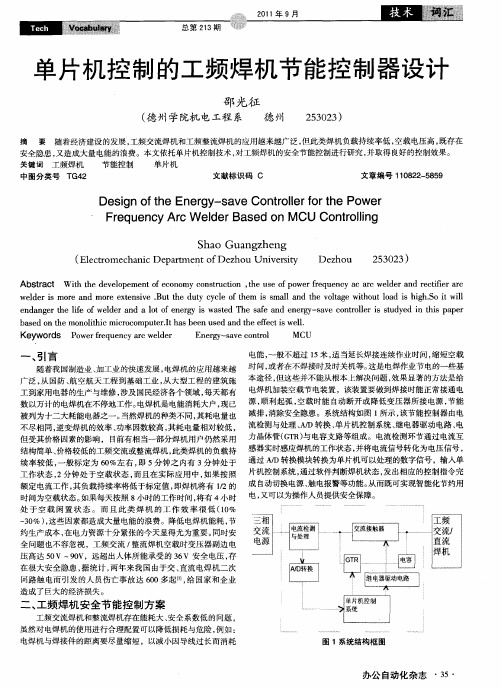
摘要 针对目前交流电焊机构造特点和工作原理上的技术缺陷, 提出一种基于单片机智能控制的交流电焊机节能保护控制 器设计方案。 通过该设计方案改造的交流电焊机在不改变原有操作模式的基础上,不但能实现交流电焊机在空载状态下节 能的目的,而且大大提高了电焊机操作人员在工作中的安全系数。 从改造样机的运行测试结果来看,系统运行安全稳定,空 载状态下的节能率高达 93%以上,取得了满意的设计效果。 关键词:电焊机,节能改造,智能控制,单片机
电 焊 机 的 焊 钳 工 作 电 压 的 分 压 点 Vin 电 压 的 A / D 转 换 值 Result_Value 可 由 芯 片 内 的 特 殊 功 能 寄 存 器 ADC_DATA 直 接 读出,所以电焊机的焊钳工作电压的计算公式如下:
降低电焊机的空载电流, 达到节
能的目的。 因此节能保护控制器
图 1 节能保护控制器模型 2 硬件电路设计
节能保护控制器应用时的电源环境比较恶劣, 因此在运行 中要求安全稳定,有较强的抗干扰能力,硬件电路原理图如图 2 所示。 节能保护控制器的由焊钳电压检测电路、电源电压取样电 路、电源切换控制电路和辅助焊接电路等组成。 该设计硬件电路 结构简单,生产成本低,无须额外增加 A /D 转换电路就能实现 多路电压检测。 同时对旧交流电焊机的改造安装灵活方便,适用 各种型号的交流电焊机。
节 能 保 护 控 制 器 控 制 交 流 接 触 器 的 常 闭 辅 助 触 头 KM 断 开 、主 触头 KM 闭合,切换电焊机供电电源,恢复电焊机正常的电网供 电。 电焊 机 在 连 续 的 焊 接 中 焊 钳 工 作 电 压 大 约 维 持 在 20~35V 之间,节能保护控制器控制交流接触器维持原有的状态,保持电 焊机正常的电网供电。 当节能保护控制器检测到电焊机焊钳电 压接近 60V 以上并 保 持 有 一 定 的 时 间 后 ,则 判 断 电 焊 机 已 经 处 在停止焊接状态, 节能保护控制器控制交流接触器再次对电焊 机的供电电源切换,恢复到空载状态时的低压供电。
基于PLC的点焊机控制系统说明

摘要点焊机作为一种重要的工业用具,在当今的工业生产中占着很重要的位置。
点焊是一种重要的焊接工艺,具有成本低、生产效率高、易于实现自动化和节省材料等特点。
如今,传统的点焊机自动化程度低,生产效率不高,焊点质量差,这已经不能满足工业发展的需求。
因此,需要开发一种自动化程度高的点焊机控制系统。
本文的点焊机控制系统系采用PLC加触摸屏的控制方式,能很大程度的提高企业的生产效率,减少废品率。
本文所涉及的点焊机系采用双面双点过流焊接的原理,工作时工件被压在两个电极之间,在压力的作用下两电极之间产生电阻。
当有电流通过时,就会产生高温电弧,高温融化被焊接的工件,并且电流瞬间从另一电极沿工件流至此电极,并形成回路,不对被焊工件的内部结构产生伤害。
和传统半自动化点焊机相比较,该设备焊出的焊点及焊缝长度分布更均匀、效率更高,节省人力。
本次设计的点焊机由可转动的圆形工作台、带动电机左右移动的横梁以及控制电机上下运动的主轴构成。
主要加工某公司旋转座椅的零部件,一共有三个工位需要加工,这三个工位的运动控制都是由伺服系统完成精确的定位控制。
3套伺服系统分别控制X、Y、Z轴完成精确定位,PLC则对伺服电机驱动器进行控制,伺服驱动器则负责驱动伺服电机。
关键词:信捷PLC;伺服电机;触摸屏AbstractSpot welding as an important industrial appliances, occupied a very important position in today's industrial production. Spot-welding process is an important, low cost, high efficiency, easy to automate and saving materials and so on. Today, the traditional spot welding low degree of automation, production efficiency is not high, poor weld quality, which can not meet the needs of industrial development. Therefore, the need to develop a high degree of automation control system of spot welding. Spot welding control system system control PLC paper, plus a touch screen, to a large extent improve production efficiency, reduce scrap rates. Spot welding system referred to herein using double-sided double-point overcurrent welding principle, the work piece is pressed between two electrodes under pressure produces resistance between the two electrodes. When a current is passed, it will have a high temperature arc, high melting temperature of the workpiece to be welded, and the current moment from the other electrode along the workpiece flow to this electrode, and form a loop, does not harm the internal structure is the welder member. And the traditional semi-automatic welding machine compared to the device solder joints and weld length out more evenly distributed, high efficiency and save manpower.The design of the spot welding by a rotatable circular table, motor driven beam move around and up and down movement of the spindle motor control composition. The main processing components rotating seat of a company, a total of three stations need to be processed, these three stations precise motion control is done by the servo positioning control system. 3 sets of servo control the X, Y, Z axis for accurate positioning, PLC is to control the servo motor drives, servo drives are responsible for driving the servo motor.Keywords: XinJie PLC; servo motor; touch screen目录摘要 (I)Abstract (II)第1章绪论 (1)1.1课题意义 (1)1.2 课题的国内外现状及趋势 (1)1.2.1国内电焊机科技水平及发展趋势 (1)1.2.2国外电焊机科技水平的现状和发展 (1)1.3.课题内容 (2)第2章点焊机工艺的介绍 (3)2.1 点焊机控制系统 (3)2.1.1 系统原理 (3)2.1.2 系统控制框图 (3)2.2 点焊机控制系统的结构介绍 (4)2.3 点焊的基本原理 (4)2.4 点焊机控制系统的工艺流程 (5)2.5本章小结 (6)第3章控制方案比较 (7)3.1 方案比较 (7)3.1.1确定控制方案 (7)3.1.2确定控制方向 (8)3.2 本章小结 (8)第4章硬件设计 (9)4.1 控制要求 (9)4.2 控制方案 (9)4.3 硬件控制系统 (9)4.4 硬件选型 (10)4.4.1 PLC选型 (10)4.4.2 伺服电机的选型 (11)4.4.3 伺服驱动器的选型 (12)4.4.4 触摸屏的选型 (14)4.4.5 熔断器的选型 (15)4.4.6 按钮开关的选型 (15)4.4.7 行程开关的选型 (16)4.4.8 焊枪的选择 (17)4.4.9 交流接触器的选型 (17)4.5 PLC的I/O地址表 (18)4.5.1.输入点 (18)4.5.2.输出点 (18)4.6 PLC外部接线图 (19)4.7本章小结 (19)第5章伺服系统设计 (20)5.1 系统设计思想 (20)5.2 伺服方案设计 (20)5.3 半闭环控制系统 (20)5.4 伺服驱动器与伺服电机的连接 (21)5.4.1 伺服单元CNO接口 (22)5.4.2伺服单元CN1接口 (22)5.4.3伺服单元CN2接口 (23)5.5 位置控制设定 (23)5.5.1 操作模式选择 (23)5.5.2 电子齿轮比的设定 (24)5.6寻找参考原点 (24)5.7本章小结 (25)第6章软件设计 (26)6.1 软件设计思想 (26)6.2 软件流程图 (26)6.3 各主要程序 (27)6.3.1 初始化程序 (27)6.3.2 高速计数指令的应用 (27)6.3.3 DPLSY脉冲输出指令 (28)6.3.4 精确定位程序 (29)6.4 本章小结 (29)第7章触摸屏系统 (30)7.1 触摸屏画面的制作 (30)7.1.1 新建工程 (30)7.1.2 开机动画制作 (31)7.1.3 主菜单画面制作 (31)7.1.4 自动控制画面制作 (32)7.1.5 实时监控画面制作 (32)7.2 触摸屏调试 (33)7.3 变量定义 (34)7.4 本章小结 (34)第8章程序调试 (35)总结 (36)参考文献 (37)致谢 (38)附录A 伺服驱动器硬件接线 (39)附录B PLC外部接线图 (40)附录C 主程序 (41)第1章绪论1.1课题意义点焊机作为一种重要的工业用具,在当今工业生产中占着举足轻重的位置。
基于PLC的自动焊锡机控制系统设计毕业设计
基于PLC的自动焊锡机控制系统设计摘要随着现代技术的迅速发展,各种机械的应运而生,自动化已成为了社会发展的必然趋势,自动焊锡机也成为了工业生产中必不可少的产物。
为了提高自动控制系统的可靠性和设备的工作效率,设计了一套以PLC为核心控制器的自动焊锡机控制系统,用来取代以往的较复杂的继电器—接触器控制。
系统的核心部分采用了德国西门子公司生产的S7—200型PLC,因为在核心控制部分采用的是软件程序控制,从而在保证自动焊锡机正常运行这个要求的情况下,大大的提高了自动焊锡机故障检查与维修的方便性和容易性,同时还克服了手动操作带来的一些人为干扰因素,取得了良好的预期效果。
关键词:PLC,自动焊锡机,梯形图Design of automatic soldering machine control system based onPLCABSTRACTWith the rapid development of modern technology, all kinds of machinery came into being, automation has become an inevitable trend of social development, automatic soldering machine has also become an essential product of industrial production.In order to improve the reliability of the automatic control system and equipment efficiency, the design of automatic soldering machine control system of a PLC as the core controller, is used to replace the more complex relay - contactor control. The core of the system with the production of Germany's Siemens S7-200 PLC, as used in the core part of the software program control, thus ensuring the case of automatic soldering machine uptime requirements, greatly improves the automatic soldering machines convenience and ease of troubleshooting and maintenance, but also to overcome the manual operation to bring some human disturbance factors, achieved the desired effect.KEY WORDS: PLC,Automatic soldering machine,Ladder目录前言 (1)第1章概述 (2)1.1 自动焊锡机的背景 (2)1.2 自动焊锡机的意义 (2)第2章硬件设计 (4)2.1 自动焊锡机的结构及控制过程 (4)2.2 PLC简介 (5)2.3 PLC工作原理 (6)2.4 PLC的选取 (8)2.5自动焊锡机I/O分配表 (9)2.6 自动焊锡机外部接线图 (10)第3章软件设计 (11)3.1 自动焊锡机PLC控制顺序流程图 (11)3.2 STEP7-Micro/WIN32简介 (12)3.3 自动焊锡机梯形图 (14)3.4自动焊锡机语句表 (20)第4章组态王仿真画面 (23)4.1 组态王简介 (23)4.2设计监控画面 (25)4.3定义数据变量 (27)4.4变量动画连接 (29)4.5应用程序命令 (31)结论 (33)谢辞 (34)参考文献 (35)外文资料翻译 (36)前言近年来我国的科技与经济飞速发展,工业生产水平也有很大的提高,自动焊锡机作为工业生产中必不可少的工具,与工业生产水平息息相关。
单片机控制的多功能数字化焊机人机交互系统的设计

择 ,旋 转 编 码 器 修 改 参 数 大 小 ,L D作 为 指 示 灯 , E
数码 管 作 为 显 示 屏 。数 码 管 作 为 显示 屏 克 服 了 L D C
在 实 际焊 接 环 境 中可视 角 度不 大 、亮 度不 够 、远 距 离 观 察 不 够 清 晰 的 缺 点 。 本 设 计 中 E P O 采 用 ER M HT H IAC I的 HN 8 2 2 6芯 片 ,存 储 空 间 为 2 6K, 5X 4 5 5
( )通 过 “ 冲有 无 ”键 与 “ 接 方 法 ”键 配 1 脉 焊 合 ,可选择 焊 接方 法有 MI G,MA G,C : O ,脉 冲 MI G 和 脉 冲 MA G;通 过 “ 焊丝 直 径 ” 键可 选 择 1 m. .m 2 1 m,O ( 户 自定 义 ) “ 丝材 质 ”键 可选 择 .m 6 P 用 ; 焊 碳 钢 ,药 芯碳 钢 ,药 芯不 锈 钢 ,不锈 钢 ,O ( 户 P 用 自定 义1 ;通过 “ 出控 制 ”可 选择 调 节 参 数 的方 式 输 有 一 元 化 、分 别 。 当选 中上 述 某 一 条件 时 ,其 对 应
we igr c n 1g o.1 o J n 2 1 l n eh oo 、 V 1 N . u . 0 2 d r r 4 6
文章 编 号 :0 2 0 5 2 1 )6 0 3 — 3 10 — 2 x(O 2O — 0 5 0
・ 接 设 备 与 焊
3 5
单 片 机 控 制 的 多 功 能 数 字 化 焊 机 人 机 交 互 系 统 的 设 计
张根 元 ,李 灵 ,田松 亚 ,尚 于 杰 ,王 磊
电焊机自动控制系统的设计与实现

• (2)工作台旋转动作。
• (3)工作台升降运动
•
工作台采用两相混合式步进电机驱动,由PLC发出
控制脉冲控制步进驱动器进而带动步进电动机的进退
和旋转,由电磁阀控制汽缸的上升和下降,实现工作
台的进给和定位。
• 感谢各位老师参加我的毕业答辩, 您们辛苦了。
作台的上升、下降、左行、右行、旋转等各动作执行
手动操作。自动运行方式:按下按钮后,要求自动完成一
个工作周期或者连续工作。
工作台示意图及工作流程图
控制流程图
工作方框图
设计要求Βιβλιοθήκη •点焊机自动控制系统需要工作台自动进行直线运
动和旋转运动,以此来使焊点到达所需位置,其工作
台的运动主要为以下三个:
• (1)工作台水平直线运动。
点焊机自动控制系统的控制要求
•
系统设置有2种工作方式:手动控制方式、自动运行
方式。选择好工作方式开后按下对应开关工作台就能
在指定方式下运行。工作台在最左边时为系统原点状
态,也称初始状态,把圆锯片从初始位置移动到焊接结束 并返回原点的过程为点焊机的一个工作周期。
•
对工作台工作循环的要求:手动控制方式:要求对工
基于STC89C52单片机的点焊机控制系统的软件设计

毕业设计题目基于STC89C52单片机的点焊机控制系统的软件设计一、毕业论文(设计)的主要内容及要求:1、主要内容:(1)、收集和查阅点焊机的相关资料;(2)、掌握现有点焊机系统的基本原理及进行优劣分析;(3)、明确点焊机系统所要达到的要求和实现方法;(4)、掌握51单片机的基本原理与ADC0832模数转换芯片使用;(5)、画出点焊机系统的总体设计框图;(6)、画出电流、电压、工件准备信号、等程序流程图;(7)、编写点焊机系统各部分程序;(8)、指标要求:设计终点监测点焊机系统,实现人工设定,自动完成工件点焊;2、要求:(1)、认真分析设计课题,了解设计任务查阅相关资料,按要求完成开题报告。
(2)、遵守院相关规定和纪律,服从指导老师和实验室工作人员安排做好毕业实习和具体实验。
(3)、保质保量按时完成论文撰写工作应完成的成果。
(4)、完善的点焊机状态监测系统软件设计。
(5)、撰写高质量论文。
二、毕业论文(设计)应收集的资料及主要参考文献:[1]中国机械网.中国焊接行业的发展现状及未来展望[OL].2005.10[2]殷树言、邵青莲.coz焊接技术及应用[M].哈尔滨:哈尔滨工业大学出版社,1989.5[3]姚河清、陈亚政、孟庆芹.现代焊接技术发展的现状及展望[J].南京:河海大学2004.9 124-134[4]林三宝、黎明、吴林.计算机在焊接中的应用现状及发展前景[J],焊接,2000.8 23-56[5]杨光,焊接自动化技术的现状及展望[J].现代制造,2004.11 124-145[6]林奕鸿等,机床数字控制技术及其应用.北京:机械工业出版社,1994.8[7]徐宏.计算机数字控制技术(CNC)最新发展动态[M].机械制造.1996.9[8]秦继荣,沈安俊.现代直流伺服控制技术及系统设计.北京:机械工业出版社,1993.9[9]陈维山,赵杰.机电系统计算机控制。
哈尔滨:哈尔滨工业大学出版社,1999.2[10]Granham T.Smith CNC Machining Technology[M]. Springerer-Verlag LondonLimtied.1993.6[11]Anthony kushigian CNC dressers improve productivity,flexibility.[M]Tooling & Production, 1997.3[12]徐初雄,焊接工艺500问[M].北京:机械工业出版社,1997.2[13]川林尚扬、陈善本、李成桐等,焊接机器人及其应用[M].北京:机械工业出版社,2000.7[14]王文瀚,焊接技术手册[M],河南科学技术出版社,2000.3[15]彭友禄,焊接工艺[M].北京:人民交通出版社,2002.4[16]吴林、陈善本等,智能化焊接技术[M].北京:国防工业出版社,2000.8[17]王仲生,智能检测与控制技术[M].西安:西北工业大学出版社,2002.9[18]胡汉才,单片机原理及其接口技术(第三版)[M].北京:清华大学出版社.2005.10一、选题的意义和研究现状1.选题的理论意义、学术价值或实践价值焊接是现代制造业中最重要的工艺之一,它在很多的行业中的应用越来越广泛从机械制造、核工业、航空航天、汽车、造建筑,到电子工业、家用电器等领域,都有广泛的应用。
基于ATmega16的多功能焊机遥控器设计

AC ! ! V C
型 1 91 o
.芈 ( C ・ u Ol F 1 “ l
7
— —
TOS 1P 2 D6 C , C6 5
j 0
墅 ! 8
9 WlE E R K Y 8 6
—
—
一
£L EE NI
I E I
厂 l
C D o E
图 2 整 机 电 路原 理
11 单 片 机 .
A ME ( 特梅 尔) 司 的 m g T L爱 公 ea系列单 片 机是 8位 单 片 机 中 第 一 个 真 正 的 R S IC结 构 的 单 片 机 。
它 采 用 了 哈 佛 结 构 、 型 快 速 存 取 寄 存 器 组 、 速 大 快 的 单 周 期 指 令 系统 以及 单 级 流 水 线 等 先 进 技 术 , 使 得 A R 单 片 机 具 有 高 达 1 SMH V I / z的 高 速 运 行 M P 处 理能力 。 V 单片机拥有 3 A R 2个 通 用 T 作 寄 存 器 , 每 一 个 工 作 寄 存 器 都 相 当 于 8 5 系 列 单 片 机 中 的 0l 累 加 器 , 而 避 免 了在 传 统 结 构 中 累 加 器 和 寄 存 器 从
5
I D N /2 P I 0 N ’ P 3 I Jl D /
AC A L Q D/3 3 IK P BY Y E AD 4 A C/ 4 P
A C I5 2 坠 F D5 / Y
7 6 —{
9
—
£ 2l )1 I4 Q 3 CB, ( D I
1K 1 产 l9W E Y f RE
6= S [ 立 l N R _ I GD 二L T 1 C D
基于单片机和模糊控制的电熔焊机设计及应用的几点思考
工业技术科技创新导报 Science and Technology Innovation Herald65该文就基于单片机技术和模糊控制技术的电熔焊机的设计及应用情况进行简单的分析和探讨,从而更好的强化电熔焊机在焊接领域中的应用地位,促进和推动电熔焊机更好的发展。
1 电熔焊机的设计原理基于单片机和模糊控制的电熔焊机其设计系统主要是由温度检测电路、继电器控制电路、单片机、独立式按键盘、L C D显示器、双向晶闸管、扫描器、键盘接收电路等设备部件构成的。
它的工作原理主要是利用对系统加热来实现的。
因此,在电熔焊机的整个系统设计中,温度控制是其中最为关键的核心环节。
只有将温度控制设计的科学、恰当,才能在焊接操作过程中,运用温度检测电路对实际的施工场地温度情况进行科学、准确的检测,并利用聚乙烯管道接头上的条形码所示温度进行PI D 模糊运算,而后推算出合适的温度控制量,在经过进一步的系数修正后,确定最终的加热时间,从而将电熔焊机的温度调节到最为适宜的温度,进而有效提高焊接操作的质量和效率。
在整个加热过程中,单片机进行加热时间和电压的自动调节,LED显示器进行加热时间的倒计时显示。
当时间显示为0时,系统会自动进行断电操作,从而完成焊接任务。
其电熔焊机的加热操作过程如图1所示。
2 电源控制设计电熔焊机的工作过程是以电力为动力保障的,因此,其对电源的控制设计非常的重要。
在单片机和模糊控制电熔焊机的电源设计中,其继电器和芯片的电源采用的是L M 2576(单片降压型开关稳压器)。
这种开关稳压器具有较强的电流输出驱动能力以及工作效率,从而能够更好的保障电熔焊机控制系统在运行过程中的可靠性和稳定性,进而确保了电熔焊机的正常、运行工作。
3 环境温度检测设计单片机和模糊控制电熔焊机在运行时的温度设定同其所处的实际施工现场环境温度具有较高的关联性,通常情况下,电容焊机对施工环境的温度要求在-30~50 ℃之间。
在单片机和模糊控制电熔焊机的温度检测设计中,采用了AD590型传感器作为外部环境温度的传感器。
基于单片机的点焊机控制器系统设计
基于单片机的点焊机控制器系统设计基于单片机的点焊机控制器系统设计摘要:本文介绍了用51单片机设计的一种多功能点焊机控制器,具有自动加热、设置炉温、到设置温度自动停止等功能,并且具有结构简单、可靠性高、成本低等特点。
当前市场上的点焊机控制器基本上采用双金属片温控,控温精度低、可靠性差、功能单一。
随着微电子技术的发展,单片微处理器功能日益增强,价格低廉,在各方面得到广泛应用。
在点焊机控制器中应用单片机,具有设计简单、可靠性高、功能易扩展等优点。
本文着重于点焊机在智能控制方面的探讨。
关键词:单片机,点焊机,51,加热1 前言1.1 Proteus仿真软件简介Proteus ISIS是英国Labcenter公司开发的电路分析与实物仿真软件[9]。
它运行于Windows操作系统上,可以仿真、分析(SPICE)各种模拟器件和集成电路,该软件的特点是:①实现了单片机仿真和SPICE电路仿真相结合。
具有模拟电路仿真、数字电路仿真、单片机及其外围电路组成的系统的仿真、RS232动态仿真、I2C调试器、SPI调试器、键盘和LCD系统仿真的功能;有各种虚拟仪器,如示波器、逻辑分析仪、信号发生器等。
②支持主流单片机系统的仿真。
目前支持的单片机类型有:68000系列、8051系列、A VR系列、PIC12系列、PIC16系列、PIC18系列、Z80系列、HC11系列以及各种外围芯片。
③提供软件调试功能。
在硬件仿真系统中具有全速、单步、设置断点等调试功能,同时可以观察各个变量、寄存器等的当前状态,因此在该软件仿真系统中,也必须具有这些功能;同时支持第三方的软件编译和调试环境,如Keil C51 uVision2等软件。
④具有强大的原理图绘制功能。
总之,该软件是一款集单片机和SPICE分析于一身的仿真软件,功能极其强大。
Proteus主要用于绘制原理图并可进行电路仿真,Proteus ARES 主要用于PCB 设计。
ISIS 的主界面主要包括:1 是电路图概览区、2 是元器件列表区、3 是绘图区。
单片机控制的工频焊机节能控制器设计
处 于 空 载 闲置 ຫໍສະໝຸດ 态 。而 且 此 类 焊 机 的 工作 效 率很 低 ( 0 1 %
造成 了巨大的经济损失 。
二、 工频 焊机安全节能控 制方 案
工频 交流焊机和整流焊机存 在能耗大 、 安全系数低 的问题 ,
虽然对电焊机的使 用进 行合 理配置可以降低损耗 与危 险 , 例如 : 电焊机与焊接件的距 离要尽 量缩 短 ,以减小 因导线 过长而消耗
图 1系统结构框 图
Ke wor s P we e u n yacwed r y d o rr q e c r le f
一
E e g — a ec nrl n r — v o t y s o
MCU
电能 , 一般不超过 1 米 , 当延 长焊接连续作业 时间 , 5 适 缩短空载 时间 , 或者在不焊接时及 时关机 等。 这是 电焊作业节 电的一些基 随着我 国制造业 、 加工业 的快速发展 , 电焊机的应用越来越 但这些并 不能从根本上解决 问题 , 效果显著的方法是给 广泛 , 国防 、 空航 天工程到 基础工业 , 从 航 从大型工 程的建筑施 本途径 ,
/ 输入单 续率 较低 , 一般 标定为 6 %左右 , 5分钟之 内有 3分 钟处 于 通过 AD转换模块转换为单片机可以处理 的数字信号 , 0 即 片机控制 系统 , 通过软件判 断焊机状态 , 发出相应的控制指令完 工作状 态 , 2分钟处 于空载状态 , 且在实 际应用 中 , 果按照 而 如
基于单片机控制阻焊控制器的研制
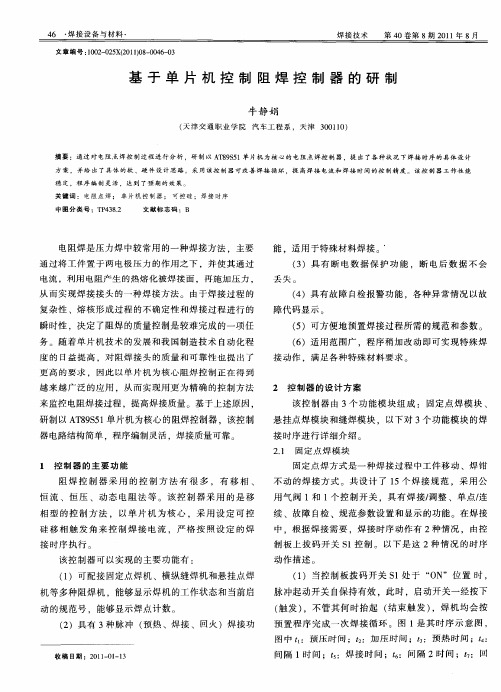
()可方 便地 预置 焊接 过程 所需 的规 范和参 数 。 5
( )适 用 范 围广 ,程序 稍加 改动 即可 实现 特殊 焊 6
接动 作 ,满足 各种 特殊 材料 要求 。
越来 越广 泛 的应用 ,从 而 实现 用更 为精 确 的控制 方法
( 发) 触 ,不管 其 何 时抬起 ( 束触 发 ) 结 ,焊 机 均会 按
预 置程 序 完成 一 次焊 接循 环 。图 1 其 时 序示 意 图 , 是
图 中 t 预 压 时 问 ;t : 2 :加 压 时 间 ;t 预 热 时 间 ;t 3 : 4 :
收 稿 日期 :2 1 - 1 1 0 10 — 3
中 t t的意 义相 同) l  ̄ 。
起 开 动关
电 磁 阀 焊 接 电流 保 持 结 束 信 号
起 动 开 关
电 磁 阀
可 设 定 1 9次 ~
图 5 时序 示 意 图
焊 接 电 流
保持结束信号
t t t t 2 3 t 4 t % 5 t 7 t s t 9
恒 流 、恒 压 、动 态 电 阻法 等 。该 控 制 器采 用 的 是 移
相 型 的控 制 方 法 ,以单 片机 为核 心 ,采 用 设 定 可 控
硅 移 相 触 发 角 来 控 制 焊 接 电 流 ,严 格 按 照设 定 的 焊 接 时序 执 行 。
用 气 阀 1和 1 控 制 开关 .具 有 焊 接/ 整 、单 点/ 个 调 连 续 、故 障 自检 、规范参 数设 置 和显示 的功能 。在焊 接
( )具 有 故 障 自检 报警 功能 ,各种 异 常情况 以故 4
31【开题报】基于PLC的点焊下位机操纵系统软件设计

一、选题依据、目的和意义电阻点焊是将被焊工件装配成搭接接头并使之压紧在两电极之间,利用电流通过焊件时产生的电阻热融化母材金属,冷却后形成焊点的一种焊接方式。
在一些工业发达的国家中,电阻焊机占焊机总产量的20%左右,用电阻焊机完成的焊接结构约占总焊接结构的30%以上。
国外焊机的自动化进展水平较高,焊接自动化程度已达到50%。
随着自动化程度的日趋提高,愈来愈要求采纳精准的方式监测与操纵电焊进程及质量,提高焊接接头的靠得住性。
电阻电焊操纵系统是保证电阻电焊各程序自动进行的关键。
当前的问题是如何实现进程自动化,并使每一个焊点所用标准参数大体稳固,使电流与通电时刻操纵精准,调剂更细致。
如此就不需要操作工人参与焊接进程,解决了由于操作工人熟练程度不同产生不同的焊接质量,从而阻碍焊接的靠得住性。
从另一个角度讲,最正确的焊接操纵时刻是以ms为单位的,用人工操作很难操纵,这即是设计电阻点焊机操纵装置的起点。
任何完整的的电阻点焊机操纵装置都要求能做电流开关,并调剂电流大小,操纵通电时刻,能减小焊接点质量波动,使每一个焊点的电流大小、通电时刻尽可能接近一致。
PLC(可编程序操纵器)技术在电阻点焊操纵器中的应用,有望提高焊接性能和适应性,使焊接工作性能稳固,减小焊机体积,增加靠得住性;使电路设计简单、程序编制灵活,并具有进一步的扩展能力[1]。
可编程序操纵器具有操纵能力强、靠得住性高、配置灵活、编程简单、利用方便、易于扩展等优势,自研制成功开始利用以来,它已经成了今世工业自动化的要紧支柱之一[2]。
本课题的目的确实是设计出以PLC为核心的操纵系统,配套利用智能操作显示器工业触摸屏以取代传统操纵面板和键盘,实现点焊的自动化操纵,提高系统运行效率,实现电阻点焊进程参数的在线检测,关于进展和完善电阻点焊技术有着重要的意义。
二、国内外研究现状1、可编程操纵器的概念可编程操纵器,简称PLC(Programmable Logic Controller),是指以运算机技术为基础的新型工业操纵装置,在l987年国际电工委员会(InternationalElectrotechnical Committee)公布的PLC标准草案中对PLC做了如下概念:PLC是一种专门为在工业环境下应用而设计的数字运算操作的电子装置。
基于Atmega8的高频逆变电焊机控制系统设计
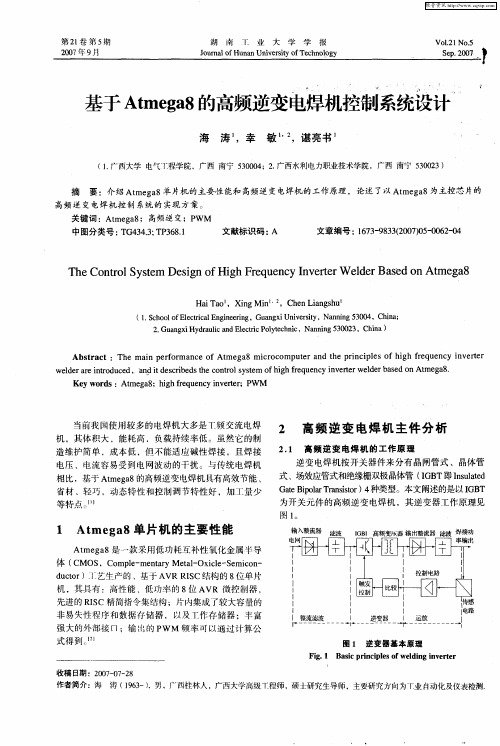
逆变 电焊机按 开关器件来 分有 晶闸管式 、晶体管 式 、场效应管式和绝缘栅双极晶体管 (G T即Isle IB nu td a
G t Bp l r str 4 a i a Ta io ) 种类 型。本文阐述 的是以 I B e or ns GT 为开关元件 的高频逆 变 电焊 机 ,其逆 变器工作原理 见
T eCo t l y tm sg f g rq e c n etr ed r s do me a h nr se De i no hF e u n y I v r le e nAt g 8 o S Hi eW Ba
Ha o .Xig M i 2 Ch n Lin s u i Ta n n 、 e agh ‘ (1 S h o f lcrc l gn eig,Gu n x iest ,Na nn 3 0 . c o l etia iern oE En a g i v ri Un y n ig5 0 4,Chn ; ia 2 Gu n x d a l n lcr oye h i . ag i Hy ru i a dE eti P ltc nc,Na nn 3 0 3.Chn c c n ig5 0 2 ia)
Abs r t:Th i e f r n e ofAt ga c o omp t r a d t e p i c p e i r q nc n re t ac e ma n p ro ma c me 8 mi r c u e n h rn i l sofh gh fe ue y i ve t r
一一
图 1 逆 变器基 本原 理
Fi 。 Ba i r n i l so l i g i v r e g 1 scp i c p e fwe d n n e t r
基于单片机的自动化点焊控制系统
本科毕业论文(设计)题目基于单片机的自动化点焊控制系统姓名学号专业年级通信工程指导教师职称2009 年 4 月 8 日目录绪论 (1)1设计要求 (1)1.1技术概要 (1)1.2 系统实现功能 (1)2设计原理 (2)2.1 硬件设计及实现 (2)2.1.1 结构框图 (2)2.1.2 中央处理单元 (3)2.1.2.1 MCU的管脚图 (3)2.1.2.2 MCU与电源 (3)2.1.2.3 MCU与晶振 (4)2.1.2.4 MCU与接近开关 (4)2.1.2.5 MCU与步进电机 (5)2.1.3 反馈单元 (6)2.1.4 焊接单元 (6)2.1.5 按键控制单元 (7)2.1.6 液晶显示单元 (8)2.2 界面设计与实现 (9)2.2.1按键分布与功能说明 (9)2.2.1.1按键分布图 (9)2.2.1.1按键功能说明 (9)2.2.2界面显示与按键操作 (9)2.2.2.1 界面关系图 (9)2.2.2.2 主界面 (10)2.2.2.3 采点时的选点界面 (11)2.2.2.4采点显示界面 (11)2.2.2.5 设置时的选择界面 (12)2.2.2.6 焊点选择界面 (12)2.2.2.7 焊点参数设置界面 (13)2.2.2.8 汽缸选择界面 (13)2.2.2.9 汽缸参数设置界面 (14)2.2.2.10 操作界面 (15)2.2.2.11 复位界面 (15)2.3软件设计及实现 (16)2.3.1软件功能 (16)2.3.2重要程序设计举例 (16)2.3.2.1 按键程序设计 (16)2.3.2.2 液晶显示程序设计 (16)2.3.2.3 电机和汽缸运的程序设计 (18)2.3.3软件程序流程图设计 (19)3 设计总结 (19)3.1设计成果 (19)3.2 设计中的不足以及改进方向 (19)参考文献 (20)附录A (21)附录B (23)附录C (26)基于单片机的自动化点焊控制系统摘要点焊在汽车制造业和其他一些需要精密焊接的领域中发挥着重要作用。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
基于单片机的点焊机控制器系统设计基于单片机的点焊机控制器系统设计摘要:本文介绍了用51单片机设计的一种多功能点焊机控制器,具有自动加热、设置炉温、到设置温度自动停止等功能,并且具有结构简单、可靠性高、成本低等特点。
当前市场上的点焊机控制器基本上采用双金属片温控,控温精度低、可靠性差、功能单一。
随着微电子技术的发展,单片微处理器功能日益增强,价格低廉,在各方面得到广泛应用。
在点焊机控制器中应用单片机,具有设计简单、可靠性高、功能易扩展等优点。
本文着重于点焊机在智能控制方面的探讨。
关键词:单片机,点焊机,51,加热1 前言1.1 Proteus仿真软件简介Proteus ISIS是英国Labcenter公司开发的电路分析与实物仿真软件[9]。
它运行于Windows操作系统上,可以仿真、分析(SPICE)各种模拟器件和集成电路,该软件的特点是:①实现了单片机仿真和SPICE电路仿真相结合。
具有模拟电路仿真、数字电路仿真、单片机及其外围电路组成的系统的仿真、RS232动态仿真、I2C调试器、SPI调试器、键盘和LCD系统仿真的功能;有各种虚拟仪器,如示波器、逻辑分析仪、信号发生器等。
②支持主流单片机系统的仿真。
目前支持的单片机类型有:68000系列、8051系列、A VR系列、PIC12系列、PIC16系列、PIC18系列、Z80系列、HC11系列以及各种外围芯片。
③提供软件调试功能。
在硬件仿真系统中具有全速、单步、设置断点等调试功能,同时可以观察各个变量、寄存器等的当前状态,因此在该软件仿真系统中,也必须具有这些功能;同时支持第三方的软件编译和调试环境,如Keil C51 uVision2等软件。
④具有强大的原理图绘制功能。
总之,该软件是一款集单片机和SPICE分析于一身的仿真软件,功能极其强大。
Proteus主要用于绘制原理图并可进行电路仿真,Proteus ARES 主要用于PCB 设计。
ISIS 的主界面主要包括:1 是电路图概览区、2 是元器件列表区、3 是绘图区。
绘制电路图的过程如下:单击2 区的P 命令即弹出元器件选择(Pick Devices)对话框,Proteus 提供了丰富的元器件资源,包括30 余种元器件库,有些元器件库还具有子库。
利用该对话框提供的关键词(Keywords)搜索功能,输入所要添加的元器件名称,即可在结果(Results)中查找,找到后双击鼠标左键即可将该元器件添到2 区,待所有需要的元器件添加完成后点击对话框右下角的OK 按钮,返回主界面。
接着在2 区中选中某一个元器件名称,直接在3 区中单击鼠标左键即可将该元器件添加到3 区。
由于是英国的软件,特别要注意的是绘图区中鼠标的操作和一般软件的操作习惯不同,这正像是司机座位和人行道走向和国内不同一样。
单击左键是完成在2 区中被选中的元器件的粘贴功能;将鼠标置于某元器件上并单击右键则是选中该元器件(呈现红色),若再次单击右键的话则删除该元器件,而单击左键的话则会弹出该元器件的编辑对话框(Edit Component);若不需再选中任何元器件,则将鼠标置于3 区的空白处单击右键即可;另外如果想移动某元器件,则选中该元器件后再按住鼠标左键即可将之移动。
元器件之间的连线方法为:将鼠标移至元器件的某引脚,即会出现一个“×”符号,按住鼠标左键后移动鼠标,将线引至另一引脚处将再次出现符号“×”,此时单击鼠标左键便可完成连线。
连线时在需拐弯的地方单击鼠标左键即可实现方向的改变。
绘制好电路后,可利用1 区的绿色边框对3 区的电路进行定位。
1.2 Keil编译及调试软件简介目前流行的51系列单片机开发软件是德国Keil公司推出的Keil C51软件,它是一个基于32位Windows环境的应用程序,支持C语言和汇编语言编程,其6.0以上的版本将编译和仿真软件统一为μVision(通常称为μV2)。
Keil提供包括C编译器、宏汇编、连接器、库管理和一个功能强大的仿真调试器等在内的完整开发方案,由以下几部分组成:μVision IDE集成开发环境(包括工程管理器、源程序编辑器、程序调试器)、C51编译器、A51汇编器、LIB51库管理器、BL51连接/定位器、OH51目标文件生成器以及Monitor-51、RTX51实时操作系统。
应用Keil进行软件仿真开发的主要步骤为:编写源程序并保存——建立工程并添加源文件——设置工程——编译/汇编、连接,产生目标文件——程序调试。
Keil使用“工程”(Project)的概念,对工程(而不能对单一的源程序)进行编译/汇编、连接等操作。
工程的建立、设置、编译/汇编及连接产生目标文件的方法非常易于掌握。
首先选择菜单File—New…,在源程序编辑器中输入汇编语言或C语言源程序(或选择File —Open…,直接打开已用其他编辑器编辑好的源程序文档)并保存,注意保存时必须在文件名后加上扩展名.asm(.a51)或.c;然后选择菜单Project—New Project…,建立新工程并保存(保存时无需加扩展名,也可加上扩展名.uv2);工程保存后会立即弹出一个设备选择对话框,选择CPU后点确定返回主界面。
这时工程管理窗口的文件页(Files)会出现“Target1”,将其前面+号展开,接着选择Source Group1,右击鼠标弹出快捷菜单,选择“Add File to Group ‘SourceGroup1’”,出现一个对话框,要求寻找并加入源文件(在加入一个源文件后,该对话框不会消失,而是等待继续加入其他文件)。
加入文件后点close返回主界面,展开“Source Group1”前面+号,就会看到所加入的文件,双击文件名,即可打开该源程序文件。
紧接着对工程进行设置,选择工程管理窗口的Target1,再选择Project—Option for Target ’Target1’(或点右键弹出快捷菜单再选择该选项),打开工程属性设置对话框,共有8个选项卡,主要设置工作包括在Target选项卡中设置晶振频率、在Debug选项卡中设置实验仿真板等,如要写片,还必须在Output选项卡中选中“Creat Hex Fi”;其他选项卡内容一般可取默认值。
工程设置后按F7键(或点击编译工具栏上相应图标)进行编译/汇编、连接以及产生目标文件。
成功编译/汇编、连接后,选择菜单Debug—Start/Stop Debug Session(或按Ctrl+F5键)进入程序调试状态,Keil提供对程序的模拟调试功能,内建一个功能强大的仿真CPU以模拟执行程序。
Keil能以单步执行(按F11或选择Debug—Step)、过程单步执行(按F10或选择Debug—Step Over)、全速执行等多种运行方式进行程序调试。
如果发现程序有错,可采用在线汇编功能对程序进行在线修改(Debug—Inline Assambly…),不必执行先退出调试环境、修改源程序、对工程重新进行编译/汇编和连接、然后再次进入调试状态的步骤。
对于一些必须满足一定条件(如按键被按下等)才能被执行的、难以用单步执行方式进行调试的程序行,可采用断点设置的方法处理(Debug—Insert/Remove Breakpoint或Debug—Breakpoints…等)。
在模拟调试程序后,还须通过编程器将.hex目标文件烧写入单片机中才能观察目标样机真实的运行状况。
Keil软件Eval版(免费产品)的功能与商业版相同,只是程序的最大代码量不得超过2kB,但对初学者而言已是足够。
Keil软件由于其强大的软件仿真功能,友好的用户界面以及易于掌握的特点而受到工程技术人员的欢迎,有人甚至认为Keil是目前最好的51单片机开发应用软件。
1.3 课程设计要求完成基于单片机的点焊机控制器系统的设计,能够实现炉温的自动加热,并检测炉温温度,对温度进行显示。
o 程序设计合理、简洁。
o 自行设计检测及相关处理电路。
o 完成单片机数据采集及处理的硬件电路设计及相关软件编程。
o 辅助电路及元器件自选。
o 自选传感器类型o 加热范围40~100摄氏度1.4 设计目的现代科技飞速发展,拥有渊博的知识是今后一展鸿图的基础.实践也同知识一样重要,如果不在学生的实践技能的锻炼上下功夫,单凭课堂理论课学习,势必出现理论与实践脱节,学习与应用脱节的局面。
任随书本上把单片微机技术介绍得多么重要、多么实用、多么好用,同学们仍然会感到那只是空中楼阁,离自己十分遥远,或者会因此而对它失去兴趣,或者会感到它高深莫测无从下手,这些情况都会令课堂教学的效果大打折扣。
“毕业设计”的目的就是让同学们在理论学习的基础上,通过完成一个涉及MCS-51单片机多种资源应用并具有综合功能的小系统目标板的设计与编程应用,使学生不但能够将课堂上学到的理论知识与实际应用结合起来,而且能够对电子电路、电子元器件、印制电路板等方面的知识进一步加深认识,同时在软件编程、排错调试、焊接技术、相关仪器设备的使用技能等方面得到较全面的锻炼和提高,为今后能够独立进行某些单片机应用系统的开发设计工作打下一定的基础。
2 设计方案 2.1 原理框图本文介绍了用51单片机设计的一种多功能点焊机控制器,具有设置炉温、实时温度显示,自动温度保持等特点。
并且具有结构简单、可靠性高、成本低等特点。
当前市场上的点焊机控制器基本上采用双金属片温控,控温精度低、可靠性差、功能单一。
随着微电子技术的发展,单片微处理器功能日益增强,价格低廉,在各方面得到广泛应用。
在点焊机控制器中应用单片机,具有设计简单、可靠性高、功能易扩展等优点。
点焊机控制器主要实现对炉温的控制,并满足不同用户的个性需求。
因此一个较完善的控制器应具有以下功能:炉温的测量与显示;用户设定功能(如炉温设定,定时设定等);对电加热管的控制功能;一些功能键(如恒温控制等)。
SHAPE \* MERGEFORMAT图1 原理框图2.2 基本功能设计显示电路如图6所示,温度采用二位七段码显示,显示范围0℃~99℃。
对温度进行循环扫描显示。
设置按键两个,一个十位按键,一个个位按键。
3 硬件电路设计根据点焊机控制器的功能要求,并结合对51系列单片机的资源分析,采用此系列中的主流型号89C51作为电路系统的控制核心。
电点焊机控制器的总体布局如图1所示。
基本硬件电路图如图2(a)~(c)所示。
在本系统中,P0.0~P0.3用于七段码显示,P2.6控制水闸开关,P2.7控制电加热管,P3.3~P3.5用于按键设计和读取水量,P3.0~P3.2用于跟DS1820通信进行炉温测量,P2.0~P2.1对七段码进行扫描,P2.2~P2.5 LED指示灯显示,P3.7控制扬声器用于报警和指示。