足球机器人智能决策系统设计实现
机器人智能决策系统的设计与实现

机器人智能决策系统的设计与实现随着人工智能技术的不断发展,机器人智能决策系统也得到了广泛应用。
在许多领域,这种系统已经被应用到人们的日常生活中,例如智能家居、智能医疗等。
那么,机器人智能决策系统是如何设计和实现的呢?一、机器人智能决策系统的基本构成机器人智能决策系统通常由多个部分组成,包括数据采集、数据处理、决策制定等。
其中,数据采集是系统中最重要的步骤之一,因为只有收集到足够的数据才能为机器人提供决策依据。
数据采集可以通过传感器、人机交互、图像识别等多种方式实现。
数据处理是机器人智能决策系统的另一个重要步骤。
数据处理过程中,需要对采集到的数据进行分析和分类,找出其中的规律和趋势。
如果数据量很大,机器人智能决策系统还需要借助于机器学习等技术进行数据处理。
决策制定是机器人智能决策系统的核心部分。
在这一步骤中,机器人需要根据前面采集和处理的数据,进行判断和权衡,并最终做出相应的决策。
常用的决策制定方式包括规则制定、经验库技术、人工神经网络技术等。
二、机器人智能决策系统的设计流程机器人智能决策系统的设计流程通常包括以下几个步骤:1.确定系统需求:在设计机器人智能决策系统之前,需要明确其实际需求。
例如,智能家居系统需要能够自动识别家庭成员的需求,做出相应的决策。
2.采集数据:根据系统需求,需要使用合适的数据采集装置(如传感器、摄像头等)来收集所需的数据。
3.数据处理:通过数据处理技术,对采集到的数据进行分析和分类,以便为机器人决策提供依据。
4.制定决策规则:根据机器人的实际能力和需求,制定决策规则和算法。
5.测试和优化:对机器人智能决策系统进行测试和优化,以获得较好的运行效果。
三、机器人智能决策系统的应用机器人智能决策系统已经被广泛应用到生活中的各个领域。
例如:1.医疗领域:机器人智能决策系统可以帮助医生快速诊断疾病,并制定相应的治疗方案。
2.智能家居:智能家居系统可以通过机器人智能决策系统自动识别用户需求,从而做出相应的决策。
智慧足球系统设计方案

智慧足球系统设计方案一、系统概述智慧足球系统包括球场智能导播系统、球场安全监控系统和数据分析系统三个主要组成部分。
其中,球场智能导播系统通过高清摄像设备、无人机等技术实现对足球比赛的全程直播和精准录像回放;球场安全监控系统则通过监控摄像头、人脸识别等技术全方位保障球场安全;数据分析系统通过对比赛数据的实时采集和分析,提供球队和球迷们的比赛实时数据、分析报告等。
二、球场智能导播系统1.高清摄像设备:在球场各个角度设置高清摄像设备,实现对整个比赛过程的多角度拍摄和全程直播。
2.无人机:通过无人机拍摄,可以实现对比赛整体情况的俯瞰式拍摄,为观众提供更加震撼的观赛体验。
3.实时剪辑系统:利用先进的实时剪辑技术,将多路摄像头的视频信号进行快速、专业的剪辑处理,保证比赛画面的流畅转换和精彩时刻的捕捉。
4.录像回放系统:采用高效压缩技术,对比赛录像进行压缩储存,方便球迷进行比赛回看。
同时,还可以根据比赛数据生成精彩集锦、慢动作回放等功能。
三、球场安全监控系统1.监控摄像头:在球场内外设置多个监控摄像头,全方位对球场进行监控,确保球员和观众的安全。
2.人脸识别技术:结合球场观众数据库,通过人脸识别技术对观众进行身份识别,确保场内观众的安全。
3.源自动化报警系统:通过智能算法分析监控摄像头的视频数据,及时发现异常行为,并触发报警,以确保球场的安全。
四、数据分析系统1.实时数据采集:通过传感器和摄像设备对比赛数据进行实时采集,包括球员跑动距离、进球次数、射门次数等数据。
2.数据分析和展示:使用大数据分析技术,对比赛数据进行实时分析,生成可视化报告和实时数据展示,方便球队和球迷进行数据分析和讨论。
3.智能推荐系统:基于对比赛数据的分析和球迷偏好的学习,智能推荐球队和球员,提供用户个性化的比赛观看和分析参考。
五、系统优势1.提升观赛体验:通过高清直播、多角度拍摄和无人机俯瞰拍摄等技术,提升观众的观赛体验,增强沉浸感。
2.提供精准数据:通过实时采集和分析比赛数据,提供精准、实时的比赛数据报告,为球队和球迷提供更多参考和决策依据。
机器人足球系统的智能控制算法研究与优化

机器人足球系统的智能控制算法研究与优化引言:近年来,机器人技术的快速发展使得机器人足球系统成为学术界和工业界的研究热点。
机器人足球比赛是一个涉及多个机器人之间的协作与竞争的复杂系统,其中智能控制算法的研究与优化至关重要。
本文就机器人足球系统的智能控制算法进行探讨,旨在提高机器人足球系统的协作与竞技水平,推动机器人足球技术的进一步发展。
一、现有智能控制算法的研究1. 传统算法传统的机器人足球系统智能控制算法主要包括规则表、有限状态机和行为树等。
这些算法对某些场景下的机器人控制具有一定的效果,但在应对复杂的环境和任务时存在一定的局限性。
传统算法的问题在于其无法对环境的动态变化做出及时响应,缺乏适应性。
2. 机器学习算法近年来,机器学习算法在机器人足球系统的智能控制中得到了广泛应用。
这些算法通过学习和优化来提高机器人的决策能力和控制水平。
主要的机器学习算法包括神经网络、强化学习和遗传算法等。
这些算法通过不断迭代和学习,在大量数据的支持下可以取得较好的控制效果。
二、智能控制算法的优化方向1. 高效决策算法机器人足球系统在比赛中需要根据不同的场景做出高效的决策,因此,需要设计和优化高效的决策算法。
其中包括球队的整体策略、球员的个体策略以及对手行为的预测等。
通过综合考虑多个因素,采用最优的决策策略,可以提高机器人足球系统在比赛中的竞争力。
2. 协作算法在机器人足球系统中,多个机器人需要协作以实现共同的目标。
因此,设计有效的协作算法对于提高机器人足球系统的水平至关重要。
协作算法需要考虑机器人之间的通信、合作和调度等问题,以使所有机器人在比赛中形成良好的协作关系,增强球队的整体实力。
3. 自适应算法机器人足球系统需要在不同的环境和任务下运行,并且需要适应环境的变化。
因此,自适应算法的研究对于机器人足球系统的智能控制至关重要。
自适应算法可以根据不同的环境和任务,在运行过程中实时进行参数调整和决策优化,以提高机器人足球系统的鲁棒性和适应性。
足球机器人原理

足球机器人原理
足球机器人是一种通过技术手段实现足球比赛参与和操作的机器人。
其原理主要包括感知、决策和执行三个方面。
感知方面,足球机器人通过搭载各种传感器获取场地信息,例如摄像头获取图像信息、红外传感器检测距离和位置等。
这些传感器能够将外部环境的信息转化为数字信号,并传递给下一步的决策操作。
决策方面,足球机器人的核心是搭载了人工智能技术,通过对感知到的信息进行处理和分析,制定出相应的策略和决策。
这些策略包括进攻、防守、传球、射门等,使机器人能够根据当前的比赛情况做出最佳的动作选择。
执行方面,足球机器人根据决策生成的指令,通过驱动装置进行具体动作执行。
例如,机器人可以通过电机控制轮子的运动来实现移动,通过电磁继电器控制摄像头云台的转动等。
这样,机器人就能够在场地上完成各种动作,并参与到足球比赛中。
整个足球机器人的原理基于感知、决策和执行的闭环过程,通过感知场地信息、决策策略和执行动作,使机器人能够模拟人类参与足球比赛的能力。
这种技术的应用不仅可以提高足球比赛的趣味性,还可以促进机器人技术的研究和发展。
基于人工智能的机器人足球比赛策略研究

基于人工智能的机器人足球比赛策略研究人工智能(Artificial Intelligence,AI)的飞速发展使得机器人在各个领域的应用愈加广泛,其中包括机器人足球比赛。
机器人足球比赛是一项由具备自主决策和行动能力的机器人参与的高科技竞技体育运动。
本文将探讨基于人工智能的机器人足球比赛策略,并研究如何通过不断优化策略提升机器人球队的竞技水平。
一、研究背景随着人工智能的突破性发展,机器人在足球比赛中的应用逐渐取得突破性进展。
与传统足球比赛相比,机器人足球比赛更加注重技术和策略的创新。
利用人工智能技术,机器人足球比赛能够实现自主决策、自主协调和自主执行动作,进而提高球队的整体实力。
二、机器人足球比赛的技术挑战在机器人足球比赛中,机器人需要具备一系列技术来完成比赛任务。
其中,视觉感知、路径规划和动作执行是关键技术挑战。
1. 视觉感知机器人足球比赛中,机器人需要通过视觉感知来获取比赛场地和其他机器人的信息。
这要求机器人能够准确地识别球场上的目标物体,包括球和其他球员。
视觉感知技术需要具备高速、高精度和鲁棒性,以应对复杂的比赛环境。
2. 路径规划路径规划是指机器人在比赛场地中找到最佳的路径以达到特定目标。
机器人需要根据比赛的实时情况,如球的位置和其他机器人的位置,动态调整路径和速度。
路径规划技术需要综合考虑机器人的动力学特性、环境约束和比赛目标,以实现高效的移动。
3. 动作执行机器人足球比赛中,机器人需要准确执行各种动作,如传球、射门和防守等。
动作执行技术需要具备高精度的运动控制和灵活的协调能力,以实现精准的球场操作。
三、基于人工智能的机器人足球比赛策略研究基于人工智能的机器人足球比赛策略研究主要涉及以下几个方面:1. 智能决策机器人足球比赛中,每个机器人需要根据比赛的实时信息做出智能决策。
智能决策需要综合考虑多个因素,如球的位置、队友和对手的位置,以及比赛的战术要求。
机器人通过智能决策来选择最佳的行动策略,以达到比赛目标。
一种足球机器人的AI决策系统设计

是进行 决策 的基本 依据 。 息处 理的 内容 信 ( ) 讯 层— — 保 证 MAS系 统 中 的 子 包括 计算球 和各 个球 员 的距离 、 1通 球所 在 的 是 目前 世 界 上 规 模 最 大 的 机 器 人 足 球 比 Agn 之 间的通讯 , 于传 达指令 数据 。 et 用 根 责任 区 z 行状 态描述 f 体 坐标如 图 1 具 所 R b u 。 器人世界杯 足球锦杯赛 , o c p 即机
人 工智 能和机 器人 领域 的研究 热 点之 一 。 素 。 机 器 人足 球 既是 一 个 典 型 的智 能 机 器 人 () 2 , 为 研 究 发 展 多 智 能 系 统 、 机 器 状 态 描 述 的基本 思 想 是 把 赛 场上 的态 势 又 多
gn— . 赛。 举办机 器人 足球赛 的 目的是 为 了促进 据 系 统 设 计 的 不 同 , 可 以 采 用 A e tA 示 ) 。 分 布 人 工 智 能 研 究 与 教 育 的 发 展 。 器 人 g n 或 者 A e t S ̄e — gn 机 et gn — e r A e t的 操 作 方
图 1 AI r t gc S se S r c u e a e i y t m tu t r St
中是 1 个 主体 ; 初始 状态 动态变 化 。 1 ② 初 集合 判 断 出 当前 状 态 下可 能发 生 的各 种 P sin f) 返 回 球 的 坐 标 ; oio oio b : t P s in t 始 状态 随着 赛场上 的态 势而 改变 . 目标 状 动 作 。 如 球 的 运 动 趋 势 。 手 有 球 时 的 (i:返 回某一 个 机器 人 的坐标 ; rab : 比 对 p) A e () 态 是确 定 的 ,但 随着初 始状 态 的不 同 , 到 运动状 态 ( 控球 , 运动 趋势 ) 以及 无球 时 的 确 定 球 在 球场 的具 体 区域 ( A 、 、 A 、 A 、 运 。 达 目标状态 的解是 不 同的 . 使是 相 同的 运 动 状 态 ( 动 趋 势 ) 即 A 、 6 ; rap)确 定 机 器 人 在 球 场 的具 5A )A e (i : 初始 状态 ,由于受其 它 干扰 因素 的影 响 , ( ) 略层—— 根 据 状态 层 和动 作层 4策 体 区域 ( 、 、 A 、 5A ) N a(,i Al A 4A 、 6 ; erb ) A2 p: 和 每次到达 目标状态的解也是不同的; ③状 抽 象 出来 的数 据信 息 . 知识 库 中 的战术 返 回机 器 人 与足 球 的位 置关 系 的好 坏 ( 1 态可达 的不 确定性 。 足球机 器人决 策过 数 据 进 行 匹 配 . 而 推 理 出 下 一 步 各 个 角 在 从 0表示坏 )O s bp)返 回机器 人 ; bt ,l ( ’ : 程中. 由于 比赛 形 势 的复 杂 , 一个 机器 人 色 的 应 对 措 施 以 及 有 可 能 发 生 的 事 情 的 表示好 、 与足 球 之 间 的直 线 范 围 内有 没 有 障碍 ( 1 执 行 一 个 动 作 要 受 到 其 它 机 器 人 执 行 动 预 判 。
机器人足球比赛系统设计与实现
机器人足球比赛系统设计与实现机器人足球比赛是一项由各国高校生产的项目,旨在通过设计和制造参与比赛的小型机器人,提高学生们的机械设计和编程技能,同时也有利于促进国际交流。
本文将从机器人设计、调试、通信、算法等方面,介绍机器人足球比赛系统的构建过程。
一、机器人设计机器人设计是机器人足球比赛的“起点”。
设计师需要有全面的机械设计和电子技术知识,包括机身结构、传感器使用和控制算法等。
机身结构的设计用来保证机器人能够在预定的场地内正常使用。
机器人需要有肢体和轮子,以便在场地上移动,并携带所需的传感器、电池和通信设备。
传感器是机器人足球比赛中非常重要的组成部分,可以让机器人感知场地、球和对手的位置。
常用的传感器有红外线、超声波、相机等。
通过处理传感器收集的数据,机器人就可以做出响应和决策。
除此之外,机器人还需要一定的通信设备,方便和其它机器人进行通讯和协作。
常用的通信设备有蓝牙、Wi-Fi等无线设备,也有信号传输较为稳定的有线设备。
二、调试当机器人设计完成后,需要进行调试才能够运作。
调试是机器人足球比赛的要点,可以确保机器人在比赛时顺利运行。
首先,需要检查机器人的电路、电机是否连接正常,各个传感器计算数据是否准确。
这一步是重点和基础,如果出现问题,机器人将无法正常运行。
其次,需要测试机器人与其它机器人的通讯机制,同时在不同环境下测试机器人对于灯光、声音、障碍等方面的反应。
最后,需要利用场地模拟比赛,并对机器人的运动进行优化,确保机器人有足够的速度和敏锐的反应速度。
三、通信机器人足球比赛的灵魂之一就是通信。
在比赛中,机器人之间的通信可以让他们共同制定策略,并参加足球比赛。
一般来说,机器人与基站没有直接的连接,其通过无线网络和其它机器人进行通讯。
通信的方式有许多种,包括 ZigBee、无线局域网、蓝牙等。
不同的通信方式具有不同的优点和缺点。
比如,ZigBee通信路径较远,并且具有低耗能,但不适合实时应用;而无线局域网的优点是通讯速度快,但需要相对的大量电力。
机器人足球中的智能控制系统研究

机器人足球中的智能控制系统研究随着人工智能技术的不断发展,机器人技术在各个领域得到了广泛应用。
其中,机器人足球是人工智能技术在体育运动领域的一次创新尝试。
机器人足球是指通过人工智能技术实现的机器人版足球比赛,比赛过程中机器人需要自主思考、行动和协作,达到足球比赛的目的。
在机器人足球比赛中,智能控制系统是实现机器人自主思考和行动的关键技术。
本文就机器人足球中的智能控制系统进行探究和研究。
一、机器人足球的基本原理机器人足球是通过安装在机器人上的传感器和执行器来实现的。
传感器可以感知环境中的信息,如光、声、温度等等;执行器可以控制机器人的运动和动作,如移动、停止、旋转、射门等等。
机器人足球比赛通常分为两个阵营,每个阵营有多个机器人,比赛场地通常为室内,场地较小。
机器人足球比赛的目的是让机器人分别代表不同阵营,通过传球、运动和射门等方式,完成进球和防守等动作,达到足球比赛的目的。
机器人足球的基本原理就是借助控制系统实现机器人的自主思考和行动,从而达到参与足球比赛的目的。
智能控制系统就是实现机器人自主思考和行动的关键技术。
二、机器人足球中的智能控制系统智能控制系统是指通过算法和硬件设备实现机器人自主思考和行动的技术。
在机器人足球中,智能控制系统的主要作用是实现机器人的决策、规划、控制和协作等过程。
(一)机器人足球中的决策系统机器人足球中的决策系统是实现机器人自主思考和判断的关键技术。
在机器人足球中,决策系统需要完成以下任务:1. 实时感知环境信息,包括球的位置、机器人位置、对方机器人位置等信息;2. 判断当前情况,如空门、有进攻机会或需要防守等;3. 基于当前情况做出决策,如传球、盘带、射门、防守等。
机器人足球中的决策系统需要具备较高的智能化和实时性。
智能化体现在机器人需要基于环境信息进行分析、归纳、推理等过程,实现自主判断和决策;实时性则是指决策系统需要在短时间内做出正确的决策,以应对快速变化的比赛场面。
毕业设计论文足球机器人

$number {01}
目 录
• 引言 • 足球机器人概述 • 足球机器人关键技术 • 足球机器人设计与实践 • 足球机器人未来展望 • 结论与建议
01 引言
研究背景与意义
研究背景
随着科技的发展,机器人技术逐渐渗透到各个领域,其中足 球机器人是一个备受关注的方向。足球机器人不仅具有娱乐 性,还能在教育、竞赛和科研等领域发挥重要作用。
利用更先进的传感器和测量技术,足 球机器人将能够更准确地感知环境、 判断位置和距离,提高比赛中的反应 速度和准确性。
应用前景展望
教育领域
足球机器人可以作为教育工具, 用于培养青少年的编程、机器人 技术和体育技能,促进综合素质 的发展。
体育赛事
随着技术的不断进步,足球机器 人有望成为正式的体育比赛项目, 为人们提供全新的观赏体验。
详细描述
机器学习技术包括监督学习、无监督学习和强化学习等,用于训练机器人识别球场上的情况、预测对手的动作、 优化自身的策略等。通过不断地学习和训练,机器人能够逐渐提高自己的技能水平足球机器人设计与实践
设计理念与原则
功能性
足球机器人应具备完成足球比赛的基本功能, 如移动、传球、射门等。
详细描述
运动控制技术涉及对足球机器人的驱动、协调和平衡等方面的控制,包括对电 机、舵机等执行机构的精确控制,以及通过算法实现机器人快速、准确的动作 反应。
传感器技术
总结词
传感器技术是实现足球机器人感知环境的关键,它使机器人能够获取球场上的信息并做出相应的决策 。
详细描述
传感器技术包括对球场环境、对手和队友的位置、速度等信息的感知,常用的传感器有红外传感器、 超声波传感器和摄像头等。这些传感器能够实时获取球场上的信息,为机器人的决策提供依据。
机器人智能决策系统设计与实现
机器人智能决策系统设计与实现一、绪论近年来,随着人工智能技术的迅速发展,机器人的应用范围也越来越广泛,越来越多的机器人被应用于制造业、物流业、服务业等行业。
而机器人的智能决策系统是机器人的核心部分,它可以帮助机器人根据环境变化和任务需求,自主地做出合理的决策,提高机器人的工作效率和智能水平。
本文就机器人智能决策系统的设计和实现进行探讨。
二、机器人智能决策系统的基本原理机器人智能决策系统是由机器人的感知系统、知识库、推理机和执行机构构成的一个系统,它负责机器人的决策和执行工作。
具体来说,机器人智能决策系统的基本原理如下:1. 感知系统:机器人的感知系统负责采集环境信息,并将其转化成机器人能够理解的数据。
这些数据可以包括机器人所处的位置、周围物体的信息、声音等。
感知系统可以帮助机器人感知外部环境的变化,从而产生相应的行为。
2. 知识库:机器人的知识库是机器人用来存储和管理知识的数据库。
它包括机器人的任务需求、任务规则、环境数据和已有的经验等。
机器人可以根据知识库中的信息,进行决策。
3. 推理机:机器人的推理机是机器人的核心部分,它可以帮助机器人根据知识库中的信息,进行推理和决策。
机器人的推理机可以由规则推理、模糊推理、神经网络等多种方式实现。
4. 执行机构:机器人的执行机构负责执行机器人的行为。
它可以包括机器人的机械臂、电子控制系统等。
执行机构根据智能决策系统的指令,实现机器人的动作和行为。
三、机器人智能决策系统的设计和实现机器人智能决策系统是机器人整体智能体系的核心,它直接影响到机器人的智能水平和工作效率。
机器人智能决策系统的设计和实现需要包括以下几个方面:1. 任务需求分析:在设计机器人智能决策系统之前,需要对机器人的任务需求进行分析。
这包括机器人所需要完成的任务内容、任务难度和任务优先级等。
只有对任务需求进行深入的分析,才能更好地提高机器人的工作效率和智能水平。
2. 知识库设计:机器人的知识库是机器人智能决策系统的核心。
足球机器人控制系统设计

摘要机器人足球和足球机器人是近几年在国际上迅速开展起来得高技术对抗活动。
本文以机器人世界杯为背景,采用数字信号处理器(DSP)作为核心芯片,研究足球机器人的控制系统设计以及相应的控制算法应用。
通过研究足球机器人的运动特性及控制,能为将来进一步探讨例如机器人路径规划、人工智能及多机器人合作等研究打下基础。
本文首先介绍了足球机器人的兴起,足球机器人的现状及其意义。
接着讨论了足球机器人的体系结构,机器人比赛的系统的组成,工作模式及系统结构,然后简要介绍了足球机器人的比赛的要求,并在最后讨论了控制的对象即我们设计的足球机器人的机电系统结构,包括所选用的电机及其各种运动结构的设计。
第三、四、五章是本文的核心部分,第三章讲述了关于机器人控制系统的硬件电路设计。
首先根据控制要求分析系统所需的硬件结构,然后针对每一部分进行电路设计分析。
第四章是关于控制系统的软件策略。
首先根据系统的控制求介绍了软件控制的总体思想与机构,然后分析机器人的动力学和运动学模型,在建立模型的基础上阐述算法的应用。
第五章是关于足球机器人的决策子系统的体系结构及其模型的建立。
关键词:足球机器人、TMS320LF2407、运动控制、建模、决策子系统ABSTRACTSoccer robots and RoboCup are the high technology activities in recent years that have attracted wide concerns among many countries. Based on RoboCup,this paper deal with the design and research of control system of robot by using a new core CPU (DSP). The main concerns of this paper are soccer robots and I hope with the design of soccer robots, some research on their locomotive properties and control systems, this could build up solid foundation for further research in such areas as Mobile Robot Path Planning, Artificial Intelligence and Multi-Agent Collaborative Behavior.Having introduced the rise of the soccer robot at first, current situation and meaning of the soccer robot. the impact of medium-sized group of robot competition system, the working model and system architecture, and then briefly introduced robot soccer competition requirements, and discussed in the final control of the object that we design the mechanical and electrical soccer robot system architecture, including the selection of the motor and the design of the structure of a wide variety of sports.Chapter three , four and five is mainly concerned. Chapter three is concenred with the hard ware design of control system. It firstly analyzes the hard ware structures and then there are detailed design and analysis on each structure. Chapter four deal with software strategies. Firstly it discusses he software structures according to the system requirements, and then it analyzes Dynamic Model and Movement Model,It analyzes use of some control arithmetic.The fifth chapter is on the soccer robot decision-making subsystem architecture modelKey words: Soccer robot、TMS320LF2407、Motion control、Modeling、Decision subsystem摘要 (1)ABSTRACT (2)第一章绪论 (5)1.1 足球机器人的简介 (5)1.2.1 RoboCup中型组足球机器人研究现状 (8)1.2.2 RoboCup中型组足球机器人研究意义 (8)1.4本章小结 (9)第二章足球机器人的体系结构 (9)2.1机器人足球的系统原理组成 (10)2.2足球机器人的系统工作模式 (12)2.3足球机器人的系统结构组成 (13)2.4足球机器人的技术要求 (14)2.5足球机器人机电结构系统[]6 (16)第三章足球机器人控制系统硬件设计 (20)3.1控制系统的硬件电路的组成结构[]7 (20)3.2.1 TMS320LF2407的简介 (21)3.2.2基于TMS320LF2407的主控系统设计[]10 (22)3.3电机驱动电路设计[][]1211 (24)3.3.1直流电机调速控制原理 (24)3.3.2直流电机驱动设计[]13 (25)3.4传感器电路设计[]7 (27)3.4.1加速度传感器电路设计[]14 (27)3.4.2近红外探测传感器的电路设计[]8 (30)第四章足球机器人的控制对象建模 (33)4.1控制系统的具体要求[][][]1715 (33)164.2足球机器人的动力学建模[]18 (35)4.3足球机器人的运动学建模[]19 (38)第五章中型足球机器人决策子系统分析与设计 (42)5.1 决策子系统分析 (42)5.1.1 决策子系统的任务 (42)5.1.2 决策子系统的特点 (44)5.2 决策子系统的体系结构 (44)5.2.1 决策子系统模型 (45)5.2.2 自上而下的分层递阶决策推理模型 (46)第六章总结与展望 (50)6.1 总结 (50)6.2 对今后工作的展望 (51)参考文献 (52)致谢 (54)附录一英文科技文献翻译 (55)附录二毕业设计任务书 (65)第一章绪论1.1 足球机器人的简介一、起源机器人足球的最初想法由University of British Columbia, Canada 的Alan Mackworth 教授于1992年正式提出。
基于RoboCup的智能足球机器人控制系统设计与实现

基于RoboCup的智能足球机器人控制系统设计与实现引言:智能足球机器人作为人工智能领域的重要研究课题,有着广阔的应用前景。
基于RoboCup的智能足球机器人控制系统设计与实现是当前研究中的热点话题。
本文将探讨智能足球机器人控制系统的设计与实现方法,并提出一种基于RoboCup的智能足球机器人控制系统方案。
一、智能足球机器人控制系统设计1. 控制系统架构智能足球机器人控制系统一般由传感器模块、决策模块和执行模块组成。
传感器模块用于获取环境信息,包括视觉和声音等;决策模块用于分析环境信息和当前状态,制定合理的决策策略;执行模块用于将决策转化为机器人动作。
控制系统需要具备快速响应、高鲁棒性和自适应性等特点。
2. 环境感知智能足球机器人需要准确感知周围环境,以便正确地判断场地、球门位置和球的位置等信息。
视觉传感器是感知环境的常用工具,可以使用摄像头获取场地图像,并通过图像处理算法提取所需信息。
此外,声音传感器也可以辅助感知,例如通过声音识别球与机器人之间的交互。
3. 决策与规划智能足球机器人需要具备决策能力,根据环境信息和当前状态制定合理的决策策略。
机器人可以采用传统的规则策略,如遵循固定的战术和战略;也可以采用机器学习算法,通过训练获取决策模型。
决策与规划模块需要考虑多个目标和约束条件,如进攻、防守、传球等。
4. 动作执行智能足球机器人的动作执行模块负责将决策转化为机器人的动作指令。
动作执行需要考虑机器人的运动能力和动作规划。
机器人需要具备精准的定位和运动控制能力,以便在比赛中能够快速、准确地执行决策。
二、基于RoboCup的智能足球机器人控制系统实现1. 硬件平台选择实现智能足球机器人控制系统需要选择合适的硬件平台。
RoboCup作为智能足球机器人领域的国际比赛,提供了多种硬件平台供选用。
常见的硬件平台包括Nao、Darwin-OP和Humanoid Robot等。
选择合适的硬件平台可以提供良好的硬件支持和开发工具,方便控制系统的实现。
机器人足球比赛决策及实现

文献综述研究课题:机器人足球决策系统研究组员(班级及学号):熊汇韬(3班10)罗运真(3班15)赵大帅(2班24)彭晗(2班23)唐昊(2班21)游斌(2班19)杨荃月(2班28)摘要机器人足球比赛是近年来在国际上迅速开展起来的国际对抗活动。
它是人工智能领域与机器人研究领域的基础研究课程,是一个极富挑战性的研究项目。
机器人足球比赛对研究多智能体的合作与竞争理论具有重要的实践与指导意义。
而在机器人足球比赛中, 决策系统根据视觉系统提供的机器人位姿和足球位置信息, 进行快速准确的决策, 是取得胜利的关键。
本文以机器人系统的核心子系统决策子系统的开发为背景,主要介绍ROBOCUP(机器人足球世界杯比赛)机器人足球赛仿真技术,关于机器人的基本动作、路径规划、决策能力的研究,研究行之有效的决策推理方法。
对目前决策系统问题主要是实时性、准确性、适应性和稳定性。
针对上述问题, 开发了面向RoboCup 小型组机器人足球比赛的决策系统, 重点解决了算法设计与系统特性之间的矛盾。
关键词:机器人足球; 可视化编程; 算法;决策;目录一. 介绍: (4)二. 系统分级 (6)1. 视觉子系统: (7)2. 决策子系统: (8)3. 通讯子系统: (9)决策六步经典方法推理模型 (9)三. 系统核心------决策模块 (10)1. 机器人足球比赛系统决策子系统的一般结构: (10)2. 产生式推理模型: (11)3. 决策编程的可视化 (12)4. 决策系统各模块分析 (13)预处理模块 (14)态势分析与策略选择模块 (14)队型确定与角色分配模块 (14)目标位置确定模块 (14)运动轨迹规划模块 (14)动作选择模块 (15)5. 决策系统各模块设计 (15)输入信息预处理模块 (15)态势分析与策略选择模块 (16)队型确定与角色分配模块 (16)目标位置确定模块 (17)运动轨迹规划模块 (18)动作选择模块 (19)四.决策层中KICK的智能算法 (20)1. 基于倒脚踢球策略的模糊逻辑算法 (20)2 .基于多次踢球策略的遗传算法 (21)五.机器人路径规划典型方法 (22)1. 栅格法: (22)2. 人工势场法: (24)六.论述 (25)七.总结: (26)参考文献 (27)一. 介绍:近年来,随着计算机技术的发展,分布式人工智能(Distributed Artificial Intelligence, DAI)已经成为人工智能领域的重要研究方向之一。
机器人的智能决策系统设计与实现

机器人的智能决策系统设计与实现哎呀,要说机器人的智能决策系统设计与实现,这可真是个有趣又复杂的事儿!咱们先来说说啥是智能决策系统。
简单来讲,就好比一个超级聪明的大脑,能让机器人在面对各种各样的情况时,快速做出准确又合适的决定。
就像有一次,我在一个工厂里看到机器人在组装零件。
那个场景,真是让我印象深刻!那机器人的动作精准又迅速,仿佛它心里早就知道该怎么做,一点儿都不犹豫。
这背后靠的就是强大的智能决策系统。
那怎么来设计这样一个系统呢?首先,得给机器人装上各种“传感器”,就像人的眼睛、耳朵一样,能收集周围的信息。
比如说温度、湿度、物体的形状和位置等等。
这些信息就像是原材料,得先收集起来。
然后,还得有厉害的算法。
这算法就像是大厨的菜谱,告诉机器人怎么处理这些收集来的信息。
比如说,遇到一个形状不规则的零件,算法就得告诉机器人从哪个角度抓取,用多大的力气。
而且啊,这个系统还得不断学习和改进。
就跟咱们人一样,做得多了,经验就丰富了,下次再遇到类似的情况就能做得更好。
比如说,第一次组装某个零件的时候,机器人可能速度有点慢,但是通过不断地总结经验,调整决策,后面就能越来越快,越来越准确。
实现这个智能决策系统可不简单。
得有强大的硬件支持,就像给机器人装了一颗强大的“心脏”,能快速处理大量的数据和复杂的计算。
还得有可靠的软件,保证系统稳定运行,不出差错。
另外,设计这个系统的时候,还得考虑各种意外情况。
比如说,突然停电了,或者传感器出故障了,机器人得有应对的办法,不能一下子就“懵圈”了。
再比如说,在物流行业,机器人要根据货物的大小、重量、目的地等信息,决定怎么搬运、存放。
这就要求智能决策系统能够快速分析各种因素,做出最优的选择。
总之,机器人的智能决策系统设计与实现,是一个充满挑战和乐趣的领域。
它就像是给机器人赋予了灵魂,让它们能够更加聪明、灵活地为我们服务。
相信在未来,随着技术的不断进步,机器人的智能决策系统会越来越厉害,给我们的生活带来更多的惊喜和便利!。
机器人足球控制系统的设计与实现
机器人足球控制系统的设计与实现随着科技的不断发展,机器人技术也在不断地被应用到生产、医疗、教育等各个领域中。
其中,机器人足球作为人工智能的重要代表之一,不仅可以增强学生的学习兴趣,还能提高机器人的实时控制能力。
本文将详细介绍机器人足球控制系统的设计与实现。
一、机器人足球的基本原理机器人足球是指一种由多个机器人组成的足球队伍,这些机器人通过信号传输系统实现相互协作。
在比赛过程中,机器人需要在规定的场地内进行进攻和防守,并完成得分任务。
机器人足球比赛不仅考察了机器人的技术水平,还需要考虑到机器人之间的协作能力。
机器人足球的实现必须依赖于现代机器人技术、感知技术和控制技术。
通过图像识别技术、声音识别技术等感知技术获取比赛现场的信息,并通过控制算法实现机器人的协作。
二、机器人足球控制系统的设计原则机器人足球控制系统分为下位机和上位机两部分。
其中下位机主要负责机器人的动作控制,包括机器人运动、转向等;上位机则负责控制比赛的整体流程、机器人的策略、成绩统计等。
机器人足球控制系统的设计需要考虑以下几个方面:1.系统的稳定性:机器人足球比赛需要机器人保持良好稳定性才能准确地完成动作。
2.系统的实时性:机器人足球比赛对系统的实时性要求很高。
由于机器人足球比赛的特殊性质,机器人在欺骗对手、防守和攻击等方面需要在千分之一秒的时间里做出决策和反应。
3.系统的可靠性:机器人足球比赛的场地条件复杂,机器人面临着不同形态、不同方位的挑战。
因此,机器人足球控制系统必须保证其可靠性。
三、机器人足球控制系统的实现方法机器人足球控制系统的设计效果取决于工程师是否能够合理地配置控制软件、硬件,并对其进行定制。
下面我们介绍机器人足球控制系统的实现方法。
1.机器人设计机器人设计是机器人足球控制系统的核心。
机器人设计应该合理、可持续、经济、实用、优美。
设计时应考虑到机器人足球比赛的场地大小和比赛规则,选择适合自己使用的机器人部件,制作机器人足球控制系统的硬件平台。
足球机器人决策子系统设计

{
rs(. ; uh06 )
pabl ; lyal 0
)
的。 ) 21 机 器 人 射 门 动作 . 22 机 器 人 守 门 动作 . 射 门技 术 动 作 是 指 当我 方 机 器 人角 色 确 定 时 , 攻 机 器 人 采取 的 进 在 比赛 过 程 中 , 截 起 到 了很 大 的作 用 。 其 在 防守 的 时 候 , 以 拦 尤 球 动作 . 目的是 进 球 得 分 , 一 技 术 动 作对 整 个 系 统 的 来说 很 关 键 。 个 很 大 的速 度 向 自己 的半 场 运 动 ,机器 人 即使 在 球 运 动 的 轨迹 附近 , 这 一 也 好 的 球 队要 求机 器 人 能 够 有 较 强 的得 分 能 力 ,而 这 主要 依 靠 射 门 动 来 不及 调 整 角 度 进行 射 门动 作 , 时拦 截 就 可 以 发挥 作 用 了。 这
21 0 1年
第 7期
S IN E&T C N L GYI F R T O CE C E H O O O MA I N N
OI T论坛。
科技信息
足球机器人决策子 系统设计
王 培屹 朱广祯 ( 郑州 幼儿师 范学校 河南 郑州
【 摘
4 00 ) 5 0 0
要】 器人足球是一个极 富挑战性的 高技术密集型项 目, 机 其研 究 内容 包括智能感知 、 智能思维、 智能学习和智能行 为等方 面, 同时也
【 关键词】 足球机器人 ; 决策子系统 ; 多Agn 系统 et
0 引 言
像 人类 足球 比赛 一样 , 器 人 应 该 根据 场 上 的 情 况 : 机 当前 比分 , 控 球 方 等 因素 安 排 自己 的 策 略 , 定 是 进 攻 还 是 防 守 , 根 据 策 略 作 出 决 再 战 术 部署 。策 略 应 该 根 据 比赛 规 则 和 经 验 进行 提 取 . 保 存 在 策 略 库 并 中 。 器 人足 球 系 统 根 据采 取 的对 策 , 机 计划 机器 人 的任 务 , 而 控 制 场 从
自主式足球机器人控制系统设计研究
教学 活动。
办公 自动化 杂志
。 9’ 3
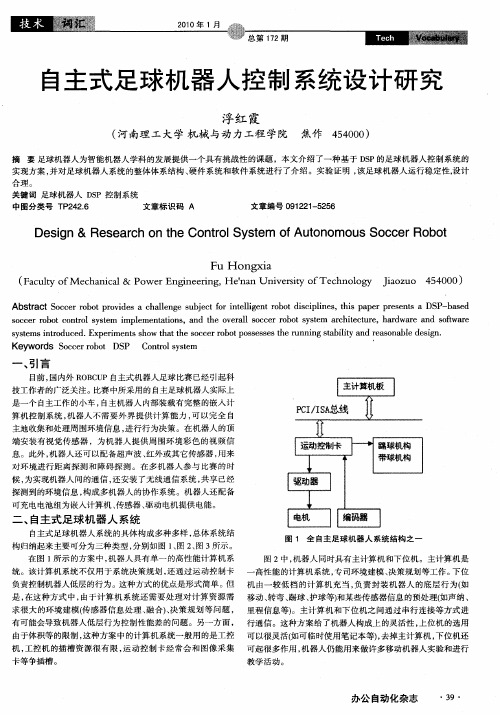
图 2 全 自主 足球 机器 人 系统 结 构 之 二
菱
图 4 电气 连 接 示 意 图
Ke wo d o c r o o DS C nrl ytm y r s S c e b t r P o t se os
一
、
引 言
目前 , 国内外 R B U O C P自主式机 器人 足球 比赛 已经 引起科
技工作者 的广泛关 注。比赛 中所 采用的 自主足球机器 人实际上 是一个 自主工作 的小车 , 自主机 器人 内部装 载有完整 的嵌 入计
F o xa u H ng i
(aut f caia& P we nier g He a iesyo eh ooY J ou 4 40 ) Fcl o hncl o r gnei , ’ nUnvrt f cn lg i zo 5 00 y Me E n n i T a
A src ocrrb t rv e h l nesbeto tlgn oo dsil e,hs a e rsnsaD P b sd b t tS ce o po i sac a e g u jc fri e i t b t i pi s ti p p rpee t S — ae a o d l n le r c n
构归纳起来 主要 可分为三种类型 , 分别如 图 1 图 2 图 3 、 、 所示 。
图 1 全 自主 足 球 机 器 人 系统 结 构 之 一
在图 1 所示 的方案 中 , 算 机 系 统 不 仅 用 于 系 统 决 策 规 划 , 通 过 运 动 控 制 卡 还
机器人足球实验报告

引言概述:足球是一种结合了机械工程、电子工程、计算机科学和等多个领域的综合性研究课题,它旨在通过开发智能,实现在足球比赛中与人类球员对抗的目标。
本实验报告将对足球进行详细分析和阐述,包括足球的背景、系统架构、技术挑战以及未来发展方向等方面。
一、足球的背景1.1足球的起源和发展历史1.2足球的意义和作用1.3国内外足球发展现状二、足球系统架构2.1足球的硬件组成2.2足球的软件系统2.3足球的通信系统三、技术挑战及解决方案3.1运动控制与路径规划3.1.1足球运动控制的基本原理3.1.2足球路径规划的算法与方法3.1.3足球的运动学建模3.2视觉感知与目标识别3.2.1足球的视觉感知技术3.2.2足球图像处理与分析3.2.3足球目标识别的算法3.3协同与策略3.3.1足球的协同控制策略3.3.2足球的团队协作策略3.3.3足球的智能决策算法四、足球的应用领域4.1教育领域的足球应用4.2工业和制造领域的足球应用4.3娱乐和娱体领域的足球应用五、足球的未来发展方向5.1足球竞赛的推广与普及5.2足球的技术突破与创新5.3足球与的结合总结:在本文中,我们对足球进行了全面的分析和阐述。
从足球的背景和起源开始,我们介绍了足球的系统架构,详细探讨了足球所面临的技术挑战,并给出了相应的解决方案。
我们还介绍了足球在教育、工业和娱乐等领域的应用,并展望了未来足球的发展方向。
通过本文的阐述,我们可以看到足球在实际应用中的重要性和潜力,相信在未来会有更多的技术突破和创新,在领域发挥更大的作用。
机器人足球控制与决策系统设计与实现

机器人足球控制与决策系统设计与实现机器人足球是指通过机器人参与的足球比赛。
机器人足球的控制与决策系统是指控制机器人在比赛中行动,并根据比赛情况进行决策的系统。
本文将讨论机器人足球控制与决策系统的设计与实现。
一、控制系统设计机器人足球的控制系统设计是指如何控制机器人的行动,使其能够有针对性地进行球员移动、球的传递和射门等动作。
以下是一些常用的控制系统设计方法:1.1 基于传感器的反馈控制机器人足球通常配备了各种传感器,如视觉传感器、陀螺仪、距离传感器等。
基于传感器的反馈控制方法可以根据传感器提供的信息,调整机器人的行动。
例如,通过视觉传感器检测到球的位置和其他球员的位置,可以决策机器人应该向何处移动以及何时进行射门。
1.2 协同控制机器人足球是一个团队比赛,多个机器人需要协同合作。
因此,协同控制是一种重要的设计方法。
协同控制可以通过定义机器人之间的协同策略和通信协议来实现。
例如,可以设计机器人之间的通信协议,使机器人能够相互传递位置信息和战术指令,以实现更好的协同。
1.3 机器学习方法机器学习方法可以让机器人从比赛中积累经验,逐渐改进自己的控制策略和决策能力。
例如,可以使用强化学习算法让机器人根据比赛结果调整自己的行动。
这种方法可以让机器人在比赛中逐渐提高自己的控制能力。
二、决策系统设计机器人足球的决策系统设计是指如何根据比赛情况做出决策,例如选择何时射门,何时传球等。
以下是一些常用的决策系统设计方法:2.1 规则基础决策系统规则基础决策系统是一种简单而直接的方法,根据预先定义的规则来做出决策。
例如,可以通过定义规则来判断何时应该传球给队友,何时应该射门等。
这种方法可以在一些简单情况下得到较好的效果,但对于复杂的比赛情况可能不够灵活。
2.2 基于状态机的决策系统基于状态机的决策系统可以根据比赛情况自动转换机器人的状态,从而做出相应的决策。
例如,可以定义不同的状态,如进攻状态、防守状态等,并根据当前状态和比赛情况做出相应的决策。
足球智慧训练系统设计方案

足球智慧训练系统设计方案设计方案:足球智慧训练系统1. 引言足球智慧训练系统是一种利用人工智能和虚拟现实技术相结合的系统,旨在提高足球运动员的智慧水平和技战术能力。
本文将介绍该系统的设计方案。
2. 系统结构足球智慧训练系统包括硬件和软件两个部分。
硬件部分主要由虚拟现实头盔、定位装置和敏感设备组成,软件部分主要由模拟比赛场景和智慧训练算法构成。
3. 功能模块3.1 虚拟比赛场景模块该模块通过虚拟现实技术创建真实的比赛场景,包括足球场地、球员、比赛规则等。
运动员可以通过戴上虚拟现实头盔来体验真实比赛情景,从而更好地掌握比赛节奏和技战术。
3.2 智慧训练算法模块该模块利用人工智能技术,分析运动员的比赛数据和动作表现,提供个性化的训练方案。
例如,系统可以通过分析运动员的动作,给出合理的改进建议;通过分析比赛数据,给出针对不同场景的应对策略。
3.3 数据采集模块系统通过定位装置和敏感设备采集运动员的运动数据,包括速度、力量、灵活性等参数。
这些数据可以用于系统的训练算法模块,为运动员提供个性化的训练方案。
4. 系统特点4.1 个性化训练系统通过分析运动员的数据和动作表现,提供个性化的训练方案。
不同运动员有不同的训练需求,系统能够根据个人特点和目标,给出相应的训练建议。
4.2 实时反馈系统能够实时监测运动员的训练和比赛表现,并提供及时反馈。
运动员可以通过虚拟现实头盔观察自己的动作表现,系统也可以通过声音提示或震动装置提醒运动员注意事项。
4.3 高度仿真虚拟现实技术能够提供高度仿真的比赛场景,使运动员能够真实地感受到比赛的紧张氛围和挑战。
通过在虚拟场景中训练,运动员能够更好地适应真实比赛环境,提高技战术能力。
5. 应用场景足球智慧训练系统适用于各个层级的足球训练,包括青少年培训、职业球员训练和教练员培训等。
系统能够帮助训练者全面提高足球技巧、智慧水平和战术能力,提升竞技成绩。
6. 结论足球智慧训练系统是一种利用人工智能和虚拟现实技术相结合的系统,能够提高足球运动员的智慧水平和技战术能力。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
足球机器人智能决策系统设计实现This manuscript was revised on November 28, 2020本文由liuchentc贡献pdf文档可能在WAP端浏览体验不佳。
建议您优先选择TXT,或下载源文件到本机查看。
第17卷第4期北京机械工业学院学报Juom ̄oeintueocieyfinIsitfMahnrBjgtV0.7NO.114De.02c202002年12月文章编号:08—15(020106820)4—0400—04足球机器人智能决策系统设计实现南建辉,贾永乐(京机械工业学院北计算机及自动化系.北京1o8)oo5摘要:球机器人系统为人工智能特别是多智能体的研究提供了一个标足准的试验平台。
系统的核心是“”决策系统;分层递阶决策的基础上,取模块脑即在采化设计;细介绍了决策系统各个模块包括视觉模块、策模块和控制模块等,提详决并出了一系列新的实现方法。
关键词:球机器人;能决策;块足智模文献标识码:A中图分类号:P1T8机器人足球比赛兴起于90年代。
是自动化及机器人领域最具有前瞻性的研究之一。
足它球机器人系统是一个典型的多智能体系统和分布式人工智能系统,及机器人学、算机视觉涉计和模式识别、智能体系统、工神经网络等领域。
而且它为人工智能理论研究及多种技术的多人集成应用提供了良好的实验平台【l。
12】由于上述特征。
足球机器人研究受到国内外广泛关注。
目前比较有影响的足球机器人比赛组织有Rou(器人足球世界杯)FRA(eeainonetnlbtocrslP机mC和IFdrtftmaiaRoo—Sce.oIoAsctn。
oii)分别由日本和韩国的学者发起。
RbCp的比赛。
aooou目前分为4组:真组、10、仿F8组F00组和有腿S20ONY机器人组…3。
近年来,于足球机器人的研究在国内发展较快,其是FI关尤RA组的mist器人组;ro机o而Roop组只是从20bCu00年以来才开始普及,进行的一般都是仿真组的比赛.关Roou且有bCP实际机器人组的比赛2002年才开始在上海进行了第一次比赛。
本文在分层递阶控制系统…基础上。
新对决策进行分层;且在具体实现过程中实1的重并现了程序模块化。
加了系统的可靠性。
低了系统开发的难度。
增降1足球机器人系统结构足球机器人系统是一个相当复杂的控制系统。
bCuRoop的F810组足球机器人系统。
般可分为4部分。
觉系统、一视智能决策系统、线通讯系统和机器人无小车系统[引.图1所示。
如从控制的角度看(图1。
觉系如)视统可以看作整个系统的输入反馈部分;图1足球机器人系统收稿日期:02—1200—10作者简介:建辉(98一)男。
南17。
山西运城人.北京机搬工业学院计算机及自动化系硕士研究生。
主要从事智能控制在自动化中的应用方面的研究。
第4期南建辉等:球机器人智能决策系统设计实现足41机器人是整个系统的“行机构”智能决策控制系统就是足球机器人系统的控制器部分;以执;可看出决策部分是控制系统的决定因素。
2智能决策系统21智能决策控制系统结构.如图2所示,能决策控制智系统可分成3部分,觉模块,视决策模块和控制模块,控制模块而又可以分为路径规划模块和无线通讯模块。
视觉模块从视觉系统中得到图2智能决策控制系统结构图原始数据,括两队机器人和球的位置坐标,向角,度以及各种状态数据等;始数据经过包朝速原卡尔曼滤波之后,线性预测法预测下一步机器人、的位置,度等;波后的数据和预测的用球速滤数据作为决策模块的输入,过分析这些数据,断场上状态,而决定各个机器人的动作、通判进目标点及速度等。
路径规划模块根据决策系统做出的判断,划路径,算各个机器人的期望速规计度,后由无线通讯模块通过通讯系统传递给场上机器人。
最22视觉模块.由于足球机器人系统实时性要求较高,求图像辨识速度达到每秒2要5帧以上。
别是由特于比赛场地灯光不均匀,以误辨识和噪声不可避免。
例如.于误辨识引起辨识出来的机器所由人的数据发生位置跳变等。
为了更好地控制机器人,用扩展Kama—uy滤波法[进行滤波,lnBuy滤波采lnBc】Kama—c法如下。
问题可以归结为:已知观测向量z,2……,^求i均方意义下的最优估计,1z,z,的系统方程和观测向量的观测方程式可以表示为:x=k:(xfk-t,u’J一)^t^1”()1^=^(^,^)^^=^(,z是第k步时的观测值,^是k步时的输入,和是期望为0的高斯白噪声,协方差^“叫其分别为Q和R。
在下面的讨论中二表示的状态估计值。
扩展KanBcl-uy滤波法具体操ma作起来分为两步进行:221根据系统动态模型更新状态估计值及其协方差..f=f(一,^0^1“,)‘一一()2P^=Ak^1P一Al+Q^1l一wP^二是^的协方差,A^和是第k步厂()于状态估计及噪声序列叫的雅可比行列式。
关K^=Pf(.[+V^)1HH ̄HTP--^^+Kk一h(=(^,)0)()3222把实际系统的观测值复合到状态估计中..P=(一Kd/)k1’kPf-是第步h()于状态观测和噪声序列的雅可比行列式。
关42北京机械工业学院学报第17卷通过设置不同的状态变量。
以分别用上述公式对有关机器人和球的数据分别进行滤波可估计。
数据进行滤波后。
单地用线性预测法预测下一帧机器人和球的位置信息和速度信息简等。
23决策模块.决策模块完成文献[]层结构决策2中协调层和运动规划层的任务。
决策模块根据场上形势(球方。
分等)取不同的控比采模式。
攻模式还是防守模式。
且根据模进并式采取不同的阵形。
后动态分配角色。
然前锋、卫、门员分别采取不同的控制策后守略。
通用的机器人控制流程图可以简单描述如图3所示。
24控制模块.图3机器人选择动作流程图控制模块包括2个子模块。
径规划和无线通讯。
路径规划根据决策模块的输出。
划机路规器人动作的路径。
无线通讯模块在路径规划完毕后。
每个机器人的期望速度通过无线通讯将系统传给场上机器人。
241路径规划模块...路径规划模块属于基本动作层的内容【。
全的路径规划控制【]图4所示。
径规划完1如路器根据视觉模块的预测数据以及决策模块提供的期望的位置和速度。
机器人的路径进行规对划。
●图4()a目标为(..z’Y。
)的路径规划图。
()虑避障时的调整。
时;b考已知初始位置(0Y。
)z。
0以及目标位置(。
Y。
根据下列公式计算2个机器人。
,)可轮子速度。
0m(.n()+i口a号)ntA=一(,)csfr=(。
2△*sncs)s2g(o/。
iA*sns△)Xng(i)nl(—r=z)=,()4(+rz)是机器人到目标点(,)z。
Y。
的方向。
是机器人的方向。
是期望的速度,是到目d第4期南建辉等:球机器人智能决策系统设计实现足43标点的距离,c是清除参数,和r是控制机器人运动方向的中间变量,机器人绕到’,t当时这个参数保持机器人到目标点的距离为c见图4a。
,()当规划的路径前面有障碍物时,应该考虑避障;障算法集成在运动控制中,避通过基于路径上突然出现的障碍物来调整目标的方向。
这种调节如图()示。
b所如果目标的方向太靠近障碍物。
方向的调节是通过预置的障碍物的清除参数的切线。
由于运动控制算法是连续运行,障分析一直不断地重新规划无障路径。
避242无线通讯模块..无线通讯模块主要的任务是把期望的机器人速度通过P的IO口传送给无线电发射C/板。
最主要的问题就是选择串口还是并口通讯,于以下几个原因,们选择了串口:基我①现在所用操作系统是wi20,果用并口,须写相应的驱动程序,加了开发的难度。
n00如必增②串口开发起来比并口更容易,单直接。
可以直接使用系统提供的A简PI函数,可以使用也一些由别人免费提供的串口类【。
7】③至于通讯速率,C机提供的串口速率完全可以满足足球机器人系统的实时性要求。
P3总结多智能体的研究是现在人工智能科学研究的一个热点,RoCp组织虽然没有明确提出obu在F8I0组必须采用分布式控制,为了更好地研究多智能体,用集中视觉分布式控制也就但采成了趋势所在,原本驻留在主机上的决策系统下载到车载单片机中。
这就对机器人小车的即软硬件配置提出了更高的要求,是我们正在研究的方向。
也参考文献:【】MaulVeoo1neals,MialBwlgoiciceoi,SrAhm,ea.CUntd一9:Roouhnnt1Mie8bCp一98slrbtwolhmpoem[]maloorcaintaJ.AIgzn,002()2—daie20.11:9—3.Ma6[]陈鑫,2吴敏,车迅.球机器人决策子系统设计与分析[】计算技术与自动化。
足J.20,0()4—5.0123:82[]RbCpReuainadRue[BOL]ht:/3ou.glonlE/ots.t/www.ocpogrgltn/.t。
prbu.r/euais4hmloo18.99[]AnraRafeoD,eio,fnAnrw。
t1BgRdThonlSlLau4deflLenWoHofdeea.ie:eCrelmalegealJmaRotScea.IbCuobocrTemnRoop一98:RooocrWolpm。
pigrVea20btScerdCuSrnedg.00.[]WehG,ioAnrdcioteKamaie,T95lBspG.nItutnthlnFlrR5—01R]Unvrifchoot4[,iesyotNotrlnrhCaoia,NC,USA。
2001.[6]BetBonn,MialBwlgMaulVes.IrbblyFlrgfrRecigrtrwigceoi。
nealompoaitieiojthnoitnenFasste.Ioednso02IlePoivsnPrceigf0EEEnentnlneecnRotcn—i2ItraiaoCofrneobisadAuotmain,Wahitn..otosngoDC,May2002.[]NagtrP.SrlotCasE/7uheJCeiprl[BOL]t:/as.htpwww.oerjc.osseceilcdpoetcm/ytm/sr—aptap,01.or.s20(转5下5页)第4期黄一兵:算最短路径树Disr算法的改进计 ̄tak55参考文献ns[]SrakMakA.PRuigFnana[]CSOrs,991ptcrIotudmetlM.ICPes19.o圈论——网络流[.京:民邮电出版社,92M]北人19.[]陈惠开.2秦学志.优化方法[.连:最M]大大连理工大学出版社,9419.[]唐焕文,3[]王兴伟,应辉,积仁.种基于服务质量的启发式点对点多媒体通信路由选择算法4张刘一【]计算机科学20,2)8J.00(7:7—8.9[]BsaHaaiItreRuigArhtcue[.SOrs,95asmlb.nentotcitrsM]CICPe19.ne9[]严蔚敏,伟民.据结构[]北京:华大学出版社,926吴数M.清19.AnirvddsrloimohrpsmpoeUtaagrtkhfrtegahofShols.treretPahteHUANG.igYinb(colfoueShomptr&IfrtnEgergHoaiesyNtj108CiaoCnomainiei.hionnUnvri。