用三菱FXN PLC实现机械手的顺序控制
机械手的PLC控制-PLC课程设计
一、要求机械手的PLC控制1.设备基本动作:机械手的动作过程分为顺序的8个工步:既从原位开始经下降、夹紧、上升、右移、下降、放松、上升、左移8个动作后完成一个循环(周期)回到原位。
并且只有当右工作台上无工件时,机械手才能从右上位下降,否则,在右上位等待。
2.控制程序可实现手动、自动两种操作方式;自动又分为单工步、单周期、连续三种工作方式。
3.设计既有自动方式也有手动方式满足上述要求的梯形图和相应的语句表。
4. 在实验室实验台上运行该程序。
二参考1. “PLC电气控制技术——CPM1A系列和S7-200”书中212页“8.1.3机械手的控制”2. “机床电气控制”第三版王炳实主编书中156页“三、机械手控制的程序设计”。
3.“可编程控制器原理及应用”宫淑贞徐世许编著人民邮电出版社书中P168—P175例4.6。
其中工作方式时手动、自动(单步)、单周期、连续;还有自动工作方式下的误操作禁止程序段(安全可靠)。
注解:“PLC电气控制技术——CPM1A系列和S7-200”书中212页“8.1.3机械手的控制”例中只有手动和自动(连续)两种操作模式,使用顺序控制法编程。
PLC 机型选用CPM2A-40型,其内部继电器区和指令与CPM1A系列的CPM有所不同。
“机床电气控制”第三版王炳实主编书中156页“三、机械手控制的程序设计”。
本例中的程序是用三菱公司的F1系列的PLC指令编制。
有手动、自动(单工步、单周期、连续)操作方式。
手动方式与自动方式分开编程。
参考其编程思想。
“可编程控制器原理及应用”宫淑贞徐世许编著人民邮电出版社书中P168—P175例4.6。
其中工作方式有手动、自动(单步)、单周期、连续;还有自动工作方式下的误操作禁止程序段(安全可靠)。
用CPM1A编程。
这里“误操作禁止”是指当自动(单工步、单周期、连续)工作方式时,按一次操作按钮自动运行方式开始,此后再按操作按钮属于错误操作,程序对错误操作不予响应。
基于三菱PLC的机械手控制系统设计毕业设计

基于三菱PLC的机械手控制系统设计毕业设计机械手是一种广泛应用于工业生产的设备。
在传统工艺中,采用继电器控制时需要使用大量的继电器,接线复杂,容易出现故障,维修困难,费时费工,增加了成本,影响了设备的工效。
因此,采用可编程控制器(PLC)对机械手进行控制是一种更加可靠、方便的方法。
本文介绍了使用XXX生产的F1/F2系列PLC对机械手进行控制的设计方案。
该方案根据机械手的运动规律进行软件编程,实现了手动操作和自动操作。
采用梯形控制直观易懂,PLC控制使接线简化,安装方便,减少了维修量,提高了工效。
第一章 PLC的技术简述1.1 PLC的定义PLC是一种可编程控制器,是一种数字计算机,可用于控制各种工业过程,包括机械手的控制。
PLC通过数字输入和输出模块与外部设备进行通信,通过编程实现对设备的控制。
1.2 PLC的特点PLC具有可编程性、可靠性、灵活性、扩展性等特点。
它可以根据不同的应用需求进行编程,可以适应不同的工业环境,具有较高的可靠性和稳定性,可以方便地进行扩展和升级。
1.3 PLC的一般结构PLC一般由中央处理器、存储器、输入模块、输出模块、通信模块等组成。
其中,中央处理器是PLC的核心部件,负责执行程序和控制设备。
存储器用于存储程序和数据。
输入模块用于接收外部设备的信号,输出模块用于控制外部设备的动作,通信模块用于与其他设备进行通信。
1.4 PLC的基本工作原理PLC的基本工作原理是通过输入模块接收外部设备的信号,经过中央处理器进行处理,然后通过输出模块控制外部设备的动作。
PLC的程序是由用户编写的,可以根据实际需求进行修改和升级。
PLC的输入和输出可以根据需要进行扩展,以适应不同的应用场合。
第二章机械手控制系统的控制要求2.1 工作对象的介绍机械手是一种用于自动化生产的设备,可以完成各种物料的搬运、装卸、组装等操作。
机械手的控制需要考虑到其运动规律和工作对象的特点。
2.2 工作原理机械手的工作原理是通过电机驱动各个关节进行运动,实现对工作对象的搬运、装卸、组装等操作。
三菱FXplc机械手毕业课程设计
( 此文档为 word 格式,下载后您可任意编辑修改!)《机电一体化系统设计》课程设计说明书题目机械手PLC控制系统设计机械工程系机械设计制造及其自动化专业 0805 班10号学生姓名彭交清.指导教师伍新吴晨曦.完成日期2011 年 11月 23日.湖南工程学院机械工程系湖南工程学院课程设计任务书设计题目:机械手 PLC控制系统设计姓名指导老师系别机械工程专业机械设计班级伍新吴晨曦教研室主任08 级陈小异学号一、设计要求及任务1.设计要求(1)用 PLC进行控制;(2)自动循环工作方式;(3)有必要的连锁保护。
2.设计任务(1)绘制工作流程框图或顺序功能图;(2)绘制 PLC 的硬件接线图;(3)相关元器件的计算与选型,制定元器件明细表;(4)编写全程序梯形图或指令表,并通过调试;(5)编写设计说明书。
二、进度安排及完成时间1.设计时间:两周, 2011 年 11 月 13 日至 2011 年 11 月 25 日。
2.进度安排第 12 周:布置设计任务,查阅资料,熟悉设计要求及任务,软硬件设计。
第13 周:调试程序,整理资料,撰写设计说明书,答辩,交设计作业。
(打印稿及电子文档)。
目录摘要 ,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,, 1 一.引言 ,,,,,,,,,,,,,,,,,,,,,,,,,,,,,, 2 二.机械手的工作原理 ,,,,,,,,,,,,,,,,,,,,,,, 8 (一)机械手的概述,,,,,,,,,,,,,,,,,,,,,, 8 (二)机械手的工作方式 ,,,,,,,,,,,,,,,,,,,,,,, 8 三.机械手控制的硬件设计 ,,,,,,,,,,,,,,,,,,,, 10 (一)输入和输出点分配表及原理接线图,,,,,,,,,,,,,,, 10 四. 控制程序,,,,,,,,,,,,,,,,,,,,,,,,,, 11 (一)通用部分梯形图设计,,,,,,,,,,,,,,,,,,,,, 11 (二)手动操作梯形图,,,,,,,,,,,,,,,,,,,,,, 11 (三)返回原位流程图,,,,,,,,,,,,,,,,,,,,,, 12 (四)返回原位梯形图,,,,,,,,,,,,,,,,,,,,, 13 (五)“自动”状态梯形图 ,,,,,,,,,,,,,,,,,,,,, 13 (六)“自动”状态流程图 ,,,,,,,,,,,,,,,,,,,,, 15 (七)搬运机械手 PLC 控制梯形图及指令表,,,,,,,,,,,,, 16 五.总结与评价 , , , , ,,,,, ,,,,, ,,,,,,,,20 六.致谢 ,,,,,,,,,,,,,,,,,,,,,,,,,,,, 21 参考文献 ,,,,,,,,,,,,,,,,,,,,,,,,,,,,, 22 摘要 :伴随着机电一体化在各个领域的应用,机械设备的自动控制成分显得越来越重要,由于某些工作环境如高温、腐蚀及有毒气体等因素的危害,增加了工人的劳动强度。
三菱PLC控制的机械手系统
三菱PLC控制的机械手系统作者:洪玉红自动化系自0101班摘要:本文介绍了如何利用PLC(可编程控制器)的自动控制和逻辑运算的优点改变PLC的程序及参数,达到灵活控制设备运行的目的,从而使设备操作变得更方便,更富有人性化。
它充分体现了工控自动化在实际生产中的重要作用。
通过对物料搬运机械手装置结构与功能的介绍,给出了FX2N-48MT型PLC在机械手控制中的应用实例,重点分析了基于PLC的机械手控制系统组成,并详细论述了以PLC为核心对步进电机和直流电机进行综合控制的软、硬件实现方法。
我们了解到各种类型机械手是自动化生产中必不可少的重要设备。
尤其是在危险场合,在严重威胁人们安全和健康的环境下,采用机械手代替人,具有十分重要的意义。
本文针对机械手系统的控制方法充分利用了PLC 和其他控制装置的特性,结构紧凑,扩展可靠,目前,在现场运行良好。
在本系统中,PLC作为现场控制设备,能够可靠、准确地完成控制操作,并且可以通过与上级工控机通信,组成分布式系统共同完成输煤系统的监测、控制要求,是现代工业控制中比较先进的控制方案,作为一个相对独立的PLC控制系统,它还可以通过RS-485总线或CC-Link总线与生产线上的其他PLC 及控制器组成工业控制网络,实现更进一步的自动化生产控制应用前景广泛。
Abstract: This text introduces how to utilize PLC programma by making use of its automatic control and logic operation to change the procedure and parameter of PLC, in order to control theequipment to make it operate flexibly , and more convenient, and more rich in humanizationer . Ithas fully reflected the important function of automation in actual production . According to theintroduces of the structure and function of equips, this paper provides the application instance ofFX2N-48MT PLC on the mechanical hand control. The control system structure based on PLC isanalyzed , and the software and hardware control method of step motor and DC-electrical motor thatregards PLC as the core is discussed. We understand that various types of the mechanical hand areimportant equipments in automated production .Particularly in the dangerous situation , under theserious circumstance that the people's safety and health are threated ,the adoption of machine handreplacing the person has the very important meaning. This text aiming at the characteristic of thecontrol method of the mechanical hand system , which makes use of PLC and other controlses ,is wellequipped , and its structure is tightly packed, the credibility expanded. Currently, circulate on thespot is good .In this system, the PLC is the control equipments on the spot , which can dependably,accurately complete the control operation, and can pass to control the machine correspondence withupper grade work, constitute the distribute type system to monitor the coal system and attain therequest, so it is a modern industry control in the control project . As an independent PLC controlsystem, it can also pass the total line of RS-485 or total line of CC- Link and produce on-line other PLCses and controllers to constitute the industry control network, carrying out the further automationproduction control application foreground extensively.Mechanical hand system based on Mitsubishi Bank PLC关键词:(PLC)可编程控制器机械手步进电机直流电机Keywords: PLC Mechanical hand step motor DC-motor一引言PLC是可编程控制器(Programmable Logic Controller)的简称,它是一种新型的通用自动控制装置,它将传统的继电器控制技术、计算机技术和通信技术融为一体,专门为工业控制而设计,具有功能强、通用灵活,可靠性高、环境适宜性好、编程简单、使用方便以及体积小、重量轻等一系列优点。
毕业设计(论文)_基于三菱FX系列PLC的机械手控制系统设计

基于三菱FX系列PLC的机械手控制系统设计基于三菱FX系列PLC的机械手控制系统设计目录第1章绪论 (1)1.1 课题背景 (1)1.2 机械手的定义与分类 (2)1.3 机械手应用及组成结构 (3)1.4 机械手的发展趋势 (5)1.5 总体设计要求 (6)第2章 PLC的介绍与选择 (8)2.1 PLC的特点 (8)2.2 PLC的选型 (9)2.3 三菱FX系列的结构功能 (11)第3章各功能实现形式与控制方式 (14)3.1 本机械手模型的机能和特性 (14)3.2 夹紧机构 (14)3.3 躯干 (15)3.4 旋转编码盘 (16)3.5 电源与传动整体 (18)3.5.1 控制电源 (18)3.5.2 传动整体 (19)第4章控制系统设计 (20)4.1 控制系统硬件设计 (20)4.1.1 PLC梯形图中的编程元件 (20)4.1.2 PLC的I/O分配 (21)4.1.3 机械手控制系统的外部接线图 (24)4.2 控制系统软件设计 (24)4.2.1 公用程序 (25)4.2.2 自动操作程序 (3)4.2.3手动单步操作程序 (9)4.2.4 回原位程序 (12)致谢 (28)参考文献 (16)附录A 全程序列表 (17)华北科技学院毕业设计(论文)第1章绪论1.1 课题背景随着现代工业技术的发展,工业自动化技术越来越高,生产工况也有趋于恶劣的态势,这对一线工人的操作技能也提出了更高的要求,同时操作工人的工作安全也受到了相应的威胁。
工人工作环境和工作内容也要求理想化简单化,对于一些往复的工作由机械手远程控制或自动完成显得非常重要。
这样可以避免一些人不能接触的物质对人体造成伤害,如冶金、化工、医药、航空航天等。
在机械制造业中,机械手应用较多,发展较快。
目前主要应用于机床、模锻压力机的上下料以及焊接、喷漆等作业,它可以按照事先制定的作业程序完成规定的操作,有些还具备有传感反馈能力,能应付外界的变化。
基于三菱PLC的机械手控制系统设计毕业设计
基于三菱PLC的机械手控制系统设计摘要机械手在工业生产中得到广泛的应用,传统工艺中采用继电器控制时,需要的继电器多,接线复杂,因此故障多,维修困难,费时费工,不仅加大了成本,而且影响设备的工效。
本文介绍了用日本三菱公司生产的F1/F2 系列可编程控制器,根据机械手的运动规律:左/右、上/下、夹/松等进行软件编程。
实现了手动操作,即:用按钮操作,对机械手的每一种运动单独进行控制;自动操作包括单步、单周期和连续操作。
另外,对右工作台有工件的特殊情况进行了处理。
采用梯形控制直观易懂,为电气人员所熟悉;采用PLC控制使接线简化,安装方便,而且保证运行的可靠性,减少维修量,提高了工效关键词机械手软件编程PLC 自动操作梯形控制目录引言 (1)第一章PLC的技术简述............................................................ (2)1.1PLC的定义................................................................... .. (2)1.2PLC的特点 (3)1.3 PLC的一般结构 (3)1.4PLC的基本工作原理 (4)第二章机械手控制系统的控制要求 (6)2.1 工作对象的介绍 (6)2.2 工作原理 (6)2.3 设备控制要求 (7)第三章机械手的I/O分配表及控制系统的程序设计 (9)3.1 机械手的I/O分配表 (9)3.2 控制系统的程序设计 (10)结论 (16)致谢 (17)参考文献 (18)引言在生产中广泛存在着很多不能直接由人手完成的工作,尤其是搬运笨重物体或在高温、高压、低温、低压、粉尘、易爆、有毒气和放射性等恶劣的环境下工作。
人工在这样环境下生产,不仅效率低,生产成本高,企业的竞争能力差,而且还会危及人的生命安全。
针对上述问题,本课题利用PLC技术,结合气动技术、位置控制技术设计了一种安全高效的气动机械手控制系统,来代替人进行正常工作,大大提高生产的机械化水平和劳动生产率,保证产品质量、实现安全生产。
基于三菱PLC的机械手控制系统设计

图书分类号:密级:毕业设计(论文)基于三菱PLC的机械手控制系统设计DESIGN OF MANIPULATOR CONTROL SYSTEM BASED ONMITSUBISHI PLC学位论文原创性声明本人郑重声明:所呈交的学位论文,是本人在导师的指导下,独立进行研究工作所取得的成果。
除文中已经注明引用或参考的内容外,本论文不含任何其他个人或集体已经发表或撰写过的作品或成果。
对本文的研究做出重要贡献的个人和集体,均已在文中以明确方式标注。
本人完全意识到本声明的法律结果由本人承担。
论文作者签名:日期:年月日学位论文版权协议书本人完全了解关于收集、保存、使用学位论文的规定,即:本校学生在学习期间所完成的学位论文的知识产权归所拥有。
有权保留并向国家有关部门或机构送交学位论文的纸本复印件和电子文档拷贝,允许论文被查阅和借阅。
可以公布学位论文的全部或部分内容,可以将本学位论文的全部或部分内容提交至各类数据库进行发布和检索,可以采用影印、缩印或扫描等复制手段保存和汇编本学位论文。
论文作者签名:导师签名:日期:年月日日期:年月日摘要在机械加工行业,机械手使用的已经很多了,是自动化生产中最为重要的元素,现在车间工人的劳动环境改善了很多,劳动生产率也是提高了很多。
本文设计的是基于三菱PLC的机械手控制系统设计,该机械手主要由L1-25型单向节流阀和24D2H-15-S1型二位五通电磁阀组成的气压回路驱动,由气动机械手实现物件的抓取,利用气缸实现物件的移动,采用行程开关来实现物料的摆放,运用欧光PSD-1010(2D-PSD)光电位敏传感器来检测工件的位置,最后使用三菱FX2N-48MR来控制电磁阀,从而实现机械手臂的旋转-下降-伸出-夹紧-收回-上升-旋转-下降-松开-上升的控制功能。
关键词机械手;PLC;气压驱动;电气元件AbstractIn the machining industry, the robot has been used a lot, is the automated production of the most important elements of plant workers are now a lot of work to improve the environment, labor productivity is also improved a lot.This design is based on the Mitsubishi PLC robot control system design, the robot consists of L1-25 type way throttle and 24D2H-15-S1 type two five-way solenoid valve pneumatic circuit is driven by a pneumatic manipulator to achieve the object crawl, mobile air cylinder to achieve the object, using the limit switch to achieve the display of materials, the use of European light PSD-1010 (2D-PSD) position sensitive photoelectric sensor to detect the position of the workpiece, last used to control the Mitsubishi FX2N-48MR solenoid valve, in order to achieve the rotating mechanical arm - the drop - projecting - clamping - recover - rising - rotation - fall - Release - increased control functions.Keywords Manipulator; PLC;Pneumatic drive;Electrical components目录摘要 (I)Abstract (II)目录 (III)1 绪论 (1)1.1 机械手的概述 (1)1.1.1 机械手的设计背景 (1)1.1.2 机械手的组成 (2)1.1.3 机械手的分类及应用组合 (2)1.2 机械手的发展及现状 (3)1.2.1机械手的发展 (3)1.2.2 PLC控制系统的引用 (4)1.3 本课题研究的主要内容及技术路线 (5)1.3.1 本课题研究的主要内容 (5)1.3.2 本课题研究的技术路线 (5)1.4 控制要求及机械手参数 (6)1.4.1 控制要求 (6)1.4.2 机械手的相关参数 (6)2 机械手的机械设计 (7)2.1 执行机构的设计 (7)2.1.1 工作原理及组成 (7)2.1.2 基本形式的选择 (7)2.1.3 机械手的结构设计 (8)2.1.4机械手外观简图 (9)2.2 驱动机构的设计 (9)2.2.1 工作原理的确定 (10)2.2.2 气动元件的选择 (10)3 机械手的硬件设计 (14)3.1 PLC的介绍 (14)3.2 电气元件的选型 (16)3.2.1 限位开关的选择 (16)3.2.2 传感器的选择 (17)3.2.3 接触器的选择 (17)3.3 PLC选型 (18)3.4 I/O设计 (18)3.5 PLC接口分布图 (19)4 机械手的软件设计 (20)4.1 流程图 (20)4.2 梯形图 (21)4.3 调试 (25)结论 (26)致谢 (27)参考文献 (28)附录 (29)附录1 气压控制原理图 (30)附录2 输入输出分配表 (30)附录3 外部接线图 (31)附录4 状态控制图 (31)附录5 梯形图 (32)1绪论机械手诞生在上世纪六十年代,到现在也发展了四十多年了,现在机械手是工业化制造里面一个自动化的关键装置。
基于三菱PLC控制的机械手应用
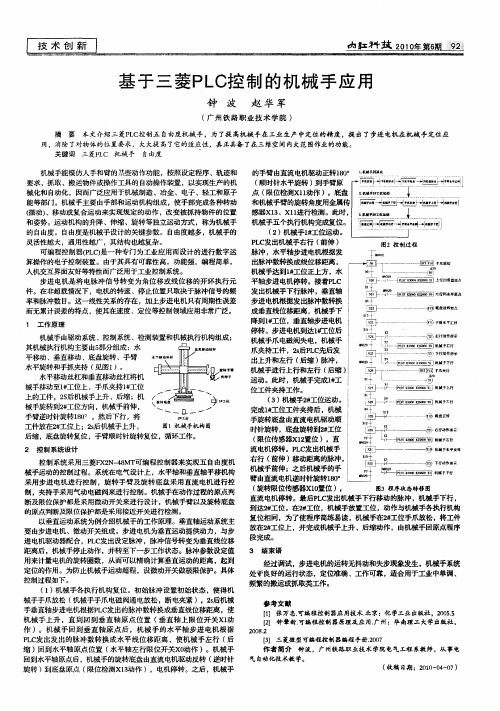
工件放在2#工位上 :2s后机械手上升 、
图1机械手机构图
后缩 ,底盘旋转复位 ,手臂顺时针旋转复位 ,循环工作 。
降到l#工位 ,垂直轴步进 电机 停转。步进 电机到达 l舡 位后 机械手爪 电磁阀失 电,机械手 爪夹持工件 ,2s后PLc先后发
出上升和左行 (后缩 )脉冲 , 机械手进行上 行和左 行 (后缩 ) 运动 。此 时 ,机械 手完成l#工 位工件夹持工 作。
图2 控 制 过 程
算操作的电子控制装 置。由于其具有可靠性高 ,功能强 ,编程简单 , 出脉冲数转换 成线位 移距 离,
人机交互界面友好等特性而广泛用于工业控制 系统 。
机械手达到 l舟工位正上方 ,水
步进 电机是将 电脉冲信 号转变 为角 位移或 线位移 的开环执 行元 平轴步进 电机停转 。接着PLC 件。在 非超 载情况 下 ,电机的转 速、停 止位置只取决于脉冲信号的频 发 出机械手下行脉冲 ,垂直轴
缩 )回到 水平轴原 点位置 (水平 轴左行 限位开关X0动作 )。机械 手
作者简 介 钟波 ,广州铁路职业技术学院电气工程 系教师,从事电
回到水平轴原点后 ,机械手的旋转底 盘由直流电机驱动反转 (逆时针 气 自动化技 术教 学。 旋转 )到底盘原点 (限位检测xl3动作 ),电机停转 。之后 ,机械 手
放在2#工 位上 ,并完成机械手上升 、后缩动作 ,由机械手 回原点程序
段完成 。
菱f2n系列plc机械手操作

转运机械手设计说明手册系部:专业班级:学生姓名:二O一三年七月前言机械手:也被称为自动手,能模仿人手和臂的某些动作功能,用以按固定程序抓取、搬运物件或操作工具的自动操作装置。
它可代替人的繁重劳动以实现生产的机械化和自动化,能在有害环境下操作以保护人身安全,因而广泛应用于机械制造、冶金、电子、轻工和原子能等部门。
工业机械人是近几十年发展起来的一种高科技自动化生产设备。
转运机械手是工业机器人的一部分。
它的特点是可通过编程来完成各种预期的搬运任务。
在工业生产和其他领域内,由于工作的需要,人们经常受到高温、腐蚀及有毒气体等因素的危害,增加了工人的劳动强度,甚至于危及生命。
自从机械手问世以来,相应的各种难题迎刃而解。
机械手可在空间抓、放、搬运物体,动作灵活多样,适用于可变换生产品种的中、小批量自动化生产,广泛应用于柔性自动线。
机械手一般由耐高温,抗腐蚀的材料制成,以适应现场恶劣的环境,大大降低了工人的劳动强度,提高了工作效率。
机械手是工业机器人的重要组成部分,在很多情况下它就可以称为工业机器人。
可编程控制器是继电器控制和计算机控制出上开发的产品,逐渐发展成以微器处理为核心把自动化技术、计算机技术、通信技术融为一体的新型工业自动控制装置。
本文应用三菱公司生产的可编程控制器FX系列PLC,实现机械手搬运控制系统,该系统充分利用了可编程控制器(PLC)控制功能。
使该系统可靠稳定,时期功能范围得到广泛应用。
机械手是在机械化,自动化生产过程中发展起来的一种新型装置。
机械手被广泛的运用于自动生产线中,机械人的研制和生产已成为高技术邻域内,迅速发展起来的一门新兴的技术,它更加促进了机械手的发展,使得机械手能更好地实现与机械化和自动化的有机结合。
机械手虽然目前还不如人手那样灵活,但它具有能不断重复工作和劳动,不知疲劳,不怕危险,抓举重物的力量比人手力大的特点,因此,机械手已受到许多部门的重视,并越来越广泛地得到了应用。
目录一转运机械手转运机械手总体介绍-----------------------1二机械手气动系统基本部件控制元件--------------------------------2执行元件--------------------------------3辅助元件--------------------------------4气动系统图------------------------------4三机械手电气控制基本电气元件----------------------------5控制面板布置----------------------------6 I/O配置分配表--------------------------7硬件接线图------------------------------8控制流程图------------------------------9控制梯形图--------------------------------11程序梯形图-----------------------------12一转运机械手1.1转运机械手总体介绍机械手主要由手部、运动机构和控制系统三大部分组成。
用PLC设计的简易的机械手控制电路

用PLC设计的简易的机械手控制电路
今日为大家介绍一个用plc设计的简易的机械手掌握电路。
掌握要求示意图:
当按下启动按钮X1后,机械手先向下移动再向上移动,然后向右移动再向右下移动,再向右上移动,再回到原点。
(我们可以想像成一个机械手抓持着一个工件,把工件从一个位置移动到另一个位置)。
I/O安排表:
首先我们先把输入与输出的安排给编好。
流程图:
像设计这种带有步进顺控指令的电路,我们可以先画一个流程图以便利我们一步步的分析与设计电路。
首先机械手从原点开头先向下——向上——向右——右下——右上——向左——复位。
然后步与步之间的转换条件我们可以设置成各个限位开关,然后我们通过移位指令把M101到M107的各个指令一步步激活。
梯形图:
当我们在启动前机械手位于原点位置,X5(左限位开关),X3(右限位开关)是被压合的,就会传输一个1到M100里面去,然后M100的常开触点闭合,按下启动按钮X1,M100的数据通过移位指令移到
M101里面去,机械手向下运动,当遇到下限位开关X2后,M101的数据通过移位指令移到M102里面去,机械手向上运动,当遇到上限位开关X3后,M102的数据通过移位指令移动到M103里面去,机械手向右运动,,,,,,以此类推,始终到M107复位指令。
假如我们想让机械手直接复位也可以按下X0复位按钮,这样机械手就可直接复位。
三菱PLC控制的机械手系统
三菱PLC控制的机械手系统班自动化系自0101作者:洪玉红的PLCPLC(可编程控制器)的自动控制和逻辑运算的优点改变摘要:本文介绍了如何利用从而使设备操作变得更方便,更富有人性化。
它,程序及参数,达到灵活控制设备运行的目的充分体现了工控自动化在实际生产中的重要作用。
通过对物料搬运机械手装置结构与功能的介的机械手控制在机械手控制中的应用实例,重点分析了基于PLCFX2N-48MT绍,给出了型PLC为核心对步进电机和直流电机进行综合控制的软、硬件实现方系统组成,并详细论述了以PLC尤其是在危险场法。
我们了解到各种类型机械手是自动化生产中必不可少的重要设备。
合,在严重威胁人们安全和健康的环境下,采用机械手代替人,具有十分重要的意义。
和其他控制装置的特性,结构紧凑,本文针对机械手系统的控制方法充分利用了PLC 作为现场控制设备,能够可靠、PLC扩展可靠,目前,在现场运行良好。
在本系统中,准确地完成控制操作,并且可以通过与上级工控机通信,组成分布式系统共同完成输煤系统的监测、控制要求,是现代工业控制中比较先进的控制方案,作为一个相对独PLC总线与生产线上的其他立的PLC控制系统,它还可以通过RS-485总线或CC-Link 及控制器组成工业控制网络,实现更进一步的自动化生产控制应用前景广泛。
Abstract: This text introduces how to utilize PLC programma by making use of its automaticcontrol and logic operation to change the procedure and parameter of PLC, in order to control the equipment to make it operate flexibly , and more convenient, and more rich in humanizationer . It has fully reflected the important function of automation in actual production . According to the introduces of the structure and function of equips, this paper provides the application instance ofFX2N-48MT PLC on the mechanical hand control. The control system structure based on PLC is analyzed , and the software and hardware control method of step motor and DC-electrical motor that regards PLC as the core is discussed. We understand that various types of the mechanical hand are important equipments in automated production .Particularly in the dangerous situation , under the serious circumstance that the people's safety and health are threated ,the adoption of machine handreplacing the person has the very important meaning. This text aiming at the characteristic of the control method of the mechanical hand system , which makes use of PLC and other controlses ,is wellequipped , and its structure is tightly packed, the credibility expanded. Currently, circulate on the spot is good .In this system, the PLC is the control equipments on the spot , which can dependably, accurately complete the control operation, and can pass to control the machine correspondence with upper grade work, constitute the distribute type system to monitor the coal system and attain the request, so it is a modern industry control in the control project . As an independent PLC control system, it can also pass the total line of RS-485 or total line of CC- Link and produce on-line other PLCses and controllers to constitute the industry control network, carrying out the further automation production control application foreground extensively.Mechanical hand system based on Mitsubishi Bank PLC关键词:(PLC)可编程控制器机械手步进电机直流电机Keywords: PLC Mechanical hand step motor DC-motor一引言PLC是可编程控制器(Programmable Logic Controller)的简称,它是一种新型的通用自动控制装置,它将传统的继电器控制技术、计算机技术和通信技术融为一体,专门为工业控制而设计,具有功能强、通用灵活,可靠性高、环境适宜性好、编程简单、使用方便以及体积小、重量轻等一系列优点。
基于三菱FX1N PLC的液压机械手控制系统设计

1 控 制 系统 的工 作 过程
本系统 的上下料机械 手 (图 1)采用 关节式 整体结 构 ,具有结构紧凑 、运动平稳 的特点 ,可 以方便地 实现 无 级调速。该系统主要是按 照控 制要求和机械 手 的运 行 路线控制 电磁铁 的得 失 电状态 驱动 液压 控制 元件 , 从 而控制液流的相关参数来 达到控制机械手 自动运行 的 目的 。部件运行方 向控制 主要 通过外部 限位 开关或 压 力继 电器传递信号改变 液压 回路 中换 向阀的工作位 置 ,使液流按要求流动 。
该 机械手在 PLC控制 下可 实现 手动 、连动 两种 工 作方式 ,其 手动方 式是 指 利用 按钮 对 机械 手每 步 动作 单独进行控 制。连动方 式是指机 械手根据控 制信 号 自 动循环执行 每步动作 ,直至获得停 止信号 。
系统启 动后 ,根据 工序要求 ,通 过旋转式 按钮 确定 机械手 的工作 方式 为单 动 或连 动形 式 ,如果 选 择单 动 则执行手 动程序 ,否 则默 认 执行 连动 程 序 。根 据本 次 设计 中机械 手的特 点 ,要 求 每一 个 动作 严格 按顺 序 执 行 ,采用 步进 指令 编写 ,保 证机 械手 的运 行有 条不 紊 , 即使 出现误 动作也不会 造成混乱 。
机床电器 2010.6
PLC·变频器 ·计算机——基 于三菱 FX。 PLC的液压机械手控制 系统设 系统 设 计
《PLC编程与应用(三菱)》项目三任务二机械手的 PLC 控制

任务二 机械手的 PLC 控制
二、移位寄存器指令及其使用
移位寄存器又称为先入先出FIFO(First in First out)堆栈,堆 栈的长度范围为2~512个字。
移位寄存器指令有先入先出写入SFWR(P) 和先入先出读出指 令SFRD(P), 用于FIFO堆栈的读写。移位寄存器指令的使用如 图3-2-7所示。
①下降→②夹紧工件→③上升→④伸出→⑤下降→⑥松开工件→⑦ 上升→⑧缩回。
回到原位后,再次循环运行。 (3)、极限位置分别用磁性位置开关来检测,下极限位置开关为SQ1, 上极限位置开关为SQ2,右极限位置开关为SQ3,左极限位置开关为 SQ4。 试设计PLC 控制程序并调试运行。要求使用移位指令编程。
图 3-2-8 流水灯程序
任务二 机械手的 PLC 控制
二、移位寄存器指令及其使用
例3:如图3-2-9所示,在传送带上传送与分拣黑白两种颜色的 物料。按下启动按钮,当光电开关检测到A 处有物料时,电动机 开始带动传送带向右运动 ;当检测到B处有合适的物料时,物料 由气缸1推入出料槽1中;当C处有合适的物料时,物料由气缸2推 入出料槽2中。按下停止按钮,电动机立即停下,当重新启动后, 系统接着停止前的状态继续工作。
图 3-2-9 物料分拣示意图
任务二 机械手的 PLC 控制
二、移位寄存器指令及其使用
例3:在传送带上传送与分拣黑白两种颜色的物料。 要求:出料槽中的物料要求一黑一白按顺序排列,当出料槽1装 满六个后再装入出料槽2中;不满足要求的物料,由传送带继续传 送到终点落到废品箱内。两个出料槽都装满6个时,本次循环结束 。 实施步骤: (1)、输入、输出接口分配见表3-2-2。
例4:如图2-2-7所示的灯塔,要求闭合“启动”开关SB,其指示 灯按以下规律循环显示:L1→L2→L3→L4→L5→L6→ L7 →L8 → L1→L2、L3、L4→L5、L6、L7、L8→L1、L2、L3、L4、L5、 L6、L7、L8,时间间隔0.3 s,断开“启动”开关SB,指示灯全部 熄灭。
用三菱fxnplc实现机械手的顺序控制

用三菱FX2N PLC实现机械手的顺序控制一、训练内容1、项目描述如图10-7所示是一气动机械手动作示意图,其功能是将工件从A处移送到B处。
气动机械手的升降和左右移行分别使用了双线圈的电磁阀,在某方向的驱动线圈失电时能保持在原位,必须驱动反方向的线圈才能反向运动。
上升、下降对应的电磁阀线圈分别是YV2、YV1,右行、左行对应的电磁阀线圈分别是YV3、YV4。
机械手的夹钳使用单线圈电磁阀YV5,线圈通电时夹紧工件,断电时松开工件。
通过设置限位开关SQ1 、SQ2、SQ3、SQ4分别对机械手的下降、上升、右行、左行进行限位,而夹钳不带限位开关,它是通过延时1.7s来表示夹紧、松开动作的完成的。
如图10-8所示为机械手的操作面板,机械手能实现手动、回原位、单步、单周期和连续等五种工作方式。
手动工作方式时,用各按钮的点动实现相应的动作;回原位工作方式时,按下“回原位”按钮,则机械手自动返回原位;单步工作方式时,每按一次起动按钮,机械手向前执行一步;选择单周期工作方式时,每按一次起动按钮,机械手只运行一个周期就停下;连续工作方式时,机械手在原位,只要按下起动按钮,机械手就会连续循环动作,直到按下停止按钮,机械手才会最后运行到原位并停下;而在传送工件的过程中,机械手必须升到最高位置才能左右移动,以防止机械手在较低位置运行时碰到其它工件。
2、实训要求2.1 分配输入/输出点见表10-4。
表10-4 PLC输入/输出点分配表2.2 PLC接线图如图10-9所示。
2.3程序设计2.3.1 基本指令编程机械手系统的程序总体结构如图10-10所示,分为公用程序、自动程序、手动程序和回原位程序等四部分。
其中自动程序包括单步、单周期和连续运行的程序,因它们的工作顺序相同,所以可将它们合编在一起。
CJ(FNC00)是条件跳转应用指令(详情见项目十二),指针标号P□是其操作数。
该指令用于某种条件下跳过CJ指令和指针标号之间的程序,从指针标号处继续执行,以减少程序执行时间。
三菱PLC-用数据移位指令实现机械手动作的模拟(THPLC-C)

实训四 机械手动作的模拟
一、 实验目的
用数据移位指令来实现机械手动作的模拟。
二、 实验设备
三菱FX2N-48MR;PLC实验模块(THPLC-C);SC-09编程线;计算机(FXGP-WIN 编程软件);连接导线若干。
三、 控制要求
机械手将工件由A处传送到B处,上升/下降和左移/右移的执行用双线圈二位电磁阀推动气缸完成;夹紧/放松由单线圈二位电磁阀推动气缸完成 。
设备装有上、下限位和左、右限位开关。
它的工作过程有八个动作(如图所示),当启动开关断开时,完成一个动作周期后再停止(防止机械手夹持的工件中途掉落)。
四、 机械手动作的模拟实验面板图:
此面板中的启动/停止用动断按钮来实现,限位开关用钮子开关来模拟,电磁阀和原位指示灯用发光二极管来模拟。
五、 I/O地址分配
输入地址 输出地址 启动按钮SB1X0 下降YV1 Y0
下降限位SQ1X1 夹紧YV2 Y1
上升限位SQ2X2 上升YV3 Y2
右移限位SQ3X3 右移YV4 Y3
左移限位SQ4X4 左移YV5 Y4
原位指示灯HL Y5
六、 实训内容及要求
⑴按照上述I/O分配设计程序梯形图;
⑵连接模拟电路,调试程序;
⑶将调试运行正常的梯形图写入实验报告。
(实验报告包括:1、实验目的2、控制要求3、I/O口分配4、梯形图5、实验结果)。
实训指导:
1.位元件移位指令及其执行条件
2.参考梯形图(见下):。
用三菱PLC设计控制气动机械手

毕业设计(论文)任务书设计(论文)题目:用三菱PLC设计控制气动机械手学院名称:电子与信息工程学院专业:电气工程及其自动化082班学生姓名:杨仲豪学号:14 指导教师:胡家芬用三菱PLC设计控制气动机械手杨仲豪摘要:工业机械手是在生产过程中采用机电结合来模拟人手动作的机械设备,它可以代替人手搬运笨重物体或在高温、有毒、高粉尘,易燃易爆、单调和放射性等恶劣的环境下工作。
传统的继电器控制,因机械触点多,接线复杂,因而控制装置体积较大,并且故障率高,可靠性差,动作精确度低;单片机控制系统由于所需驱动电流较大因而必须设计功率接口电路,还要进行抗干扰及其可靠性的设计。
PLC作为一种新型的工业控制器,其通用性和扩展性能良好、运算指令丰富,并且它的体积小、安装灵活、价格低廉、可靠性高、抗干扰能力强易于实现机电一体化且非常适合在环境条件较恶劣下使用。
本设计采用的是以PLC为核心,通过设计相应的硬件电路和软件编程实现对机械手的控制。
主要作用是完成机械部件的搬运工作,能放置在各种不同的生产线或物流流水线中,使零件搬运、货物运输更快捷、便利。
关键词:PLC,机械手,搬物、软件、控制系统Mitsubishi PLC control with pneumatic manipulator designAbstract: Industrial robots are used in the production process to simulate the manual operation with the Electrical and Mechanical machinery and equipment, it can replace manual handling heavy objects or in high temperature, toxic, high dust, inflammable, explosive, radioactive and other harsh monotone, and working conditions. The traditional relay control, due to mechanical contacts and more complex wiring, which controls large size and high failure rate, reliability, precision low action; single chip control system due to the required drive current and thus higher power interface must be designed circuit, but also the interference and reliability of the design.As a new industrial PLC controller, its versatility and good scalability, operation instruction rich, and its small size, flexible installation, low cost, high reliability, easy to implement strong anti-interference ability and very suitable for mechanical and electrical integration under harsh environmental conditions than to use. PLC is used in the design of the core, through the design of appropriate hardware and software programming for robot control Main role is to complete the mechanical components of the transportation work, can be placed in a variety of different production lines or logistics pipeline, the parts handling, transport of goods more efficient and convenient.Key Words : PLC, robot, moving objects, software, control system第一章绪论1.1论文现状及意义作为通用工业控制计算机,30年来,PLC可编程控制器从无到有,实现了工业控制领域接线逻辑到存储逻辑的飞跃;其功能从弱到强,实现了从逻辑控制到数字控制的进步;其应用领域从小到大,实现了单体设备简单控制到胜任运动控制、过程控制及集散控制等各种任务的跨越。
FX2N系列PLC课件-步进电机实现机械手位置控制

(3)指令说明
• 带加减速功能的脉冲输出指令,按[S1·]指令的最高频率分10级加 速,达到[S2·]所指定的输出脉冲数后分10级减速。
• K1500:指定的最高输出频率(HZ),其值只能是10的倍数, 范围:10---20K(HZ),可以是T,C,D,数值或是位元件组 合
• D10:指定的输出脉冲数),范围:110--2147483647,脉冲数 小于110时,脉冲不能正常输出,可以是T,C,D,数值或是位 元件组合
• (7)电源模块:
• 输入交流电压:110V~220V/50HZ、60HZ; 输出直流电压:24V/6.5A; 最大功率: 156W。
• (8)旋转码盘:
• 机械手每旋转3°发出一个脉冲。
3、控制机械手PLC的I/O地址分配表)
步进电机控制机械手模型梯形图(续)
5、系统调试
• (1)接上实验台上控制板的各模块所需的直流电源( DC24V),同时接上PLC主机电源及COM点[COM(±) 接电源的正极,COM(—)接电源的负极]。
• (2)定义实验板上的步进驱动器,上为1号下为2号。 将1号的步进驱动器输出的信号与机械手横轴的步进 电机线相连。将2号的步进驱动器输出的信号与机械 手竖轴的步进电机线相连。其它的线,根据线标接在 实验板或主机上的相应位置。注:Out(X0)表示传 感器的输出与主机输入X0端子相连,不要与主机输 出Y0端子相连。
三菱FX2N系列PLC机械手操作
三菱FX2N系列PLC机械手操作转运机械手设计说明手册系部:专业班级:学生姓名:前言机械手:也被称为自动手,能模仿人手和臂的某些动作功能,用以按固定程序抓取、搬运物件或操作工具的自动操作装置。
它可代替人的繁重劳动以实现生产的机械化和自动化,能在有害环境下操作以保护人身安全,因而广泛应用于机械制造、冶金、电子、轻工和原子能等部门。
工业机械人是近几十年发展起来的一种高科技自动化生产设备。
转运机械手是工业机器人的一部分。
它的特点是可通过编程来完成各种预期的搬运任务。
在工业生产和其他领域内,由于工作的需要,人们经常受到高温、腐蚀及有毒气体等因素的危害,增加了工人的劳动强度,甚至于危及生命。
自从机械手问世以来,相应的各种难题迎刃而解。
机械手可在空间抓、放、搬运物体,动作灵活多样,适用于可变换生产品种的中、小批量自动化生产,广泛应用于柔性自动线。
机械手一般由耐高温,抗腐蚀的材料制成,以适应现场恶劣的环境,大大降低了工人的劳动强度,提高了工作效率。
机械手是工业机器人的重要组成部分,在很多情况下它就可以称为工业机器人。
可编程控制器是继电器控制和计算机控制出上开发的产品,逐渐发展成以微器处理为核心把自动化技术、计算机技术、通信技术融为一体的新型工业自动控制装置。
本文应用三菱公司生产的可编程控制器FX系列PLC,实现机械手搬运控制系统,该系统充分利用了可编程控制器(PLC)控制功能。
使该系统可靠稳定,时期功能范围得到广泛应用。
机械手是在机械化,自动化生产过程中发展起来的一种新型装置。
机械手被广泛的运用于自动生产线中,机械人的研制和生产已成为高技术邻域内,迅速发展起来的一门新兴的技术,它更加促进了机械手的发展,使得机械手能更好地实现与机械化和自动化的有机结合。
机械手虽然目前还不如人手那样灵活,但它具有能不断重复工作和劳动,不知疲劳,不怕危险,抓举重物的力量比人手力大的特点,因此,机械手已受到许多部门的重视,并越来越广泛地得到了应用。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
用三菱F X2N P L C实现机械手的顺序控制
一、训练内容
1、项目描述
如图10-7所示是一气动机械手动作示意图,其功能是将工件从A处移送到B处。
气动机械手的升降和左右移行分别使用了双线圈的电磁阀,在某方向的驱动线圈失电时能保持在原位,必须驱动反方向的线圈才能反向运动。
上升、下降对应的电磁阀线圈分别是YV2、YV1,右行、左行对应的电磁阀线圈分别是YV3、YV4。
机械手的夹钳使用单线圈电磁阀YV5,线圈通电时夹紧工件,断电时松开工件。
通过设置限位开关SQ1 、SQ2、SQ3、SQ4分别对机械手的下降、上升、右行、左行进行限位,而夹钳不带限位开关,它是通过延时1.7s来表示夹紧、松开动作的完成的。
如图10-8所示为机械手的操作面板,机械手能实现手动、回原位、单步、单周期和连续等五种工作方式。
手动工作方式时,用各按钮的点动实现相应的动作;回原位工作方式时,按下“回原位”按钮,则机械手自动返回原位;单步工作方式时,每按一次起动按钮,机械手向前执行一步;选择单周期工作方式时,每按一次起动按钮,机械手只运行一个周期就停下;连续工作方式时,机械手在原位,只要按下起动按钮,机械手就会连续循环动作,直到按下停止按钮,机械手才会最后运行到原位并停下;而在传送工件的过程中,机械手必须升到最高位置才能左右移动,以防止机械手在较低位置运行时碰到其它工件。
2、实训要求
2.1 分配输入/输出点
见表10-4。
表10-4 PLC输入/输出点分配表
2.2 PLC接线图
如图10-9所示。
2.3程序设计
2.3.1 基本指令编程
机械手系统的程序总体结构如图10-10所示,分为公用程序、自动程序、手动程序和回原位程序等四部分。
其中自动程序包括单步、单周期和连续运行的程序,因它们的工作顺序相同,所以可将它们合编在一起。
CJ(FNC00)是条件跳转应用指令(详情见项目十二),指针标号P□是其操作数。
该指令用于某种条件下跳过CJ指令和指针标号之间的程序,从指针标号处继续执行,以减少程序执行时间。
如果选择“手动”工作方式,即X0为ON,X1为OFF,则PLC执行完公用程序后,将跳过自动程序到P0处,由于X0动断触点断开,所以直接执行“手动程序”。
由于P1处的X1的动断触点闭合,所以又跳过回原位程序到P2处。
如果选择“回
原位”工作方式,同样只执行公用程序和回原位程序。
如果选择“单步”或“连续”方式,则只执行公用程序和自动程序。
公用程序如图10-11所示,当Y4复位(即松紧电磁阀松开)、左限位X21和上限位X17接通时,辅助继电器M0变为ON,表示机械手在原位。
这时,如果开始执行用户程序(M8002为ON)、系统处于手动或回原位状态(X0或X1为ON),那么初始步对应的M10被置位,为进入单步、单周期、连续工作方式作好准备。
如果M0为OFF,M10被复位,系统不能进入单步、单周期、连续工作方式。
图中的指令ZRST(FNC40)是成批复位的应用指令,当X0为ON时,对M11~M18的辅助继电器复位,以防止系统从自动方式转换到手动方式,再返回自动方式时出现两种不同的活动步。
手动程序如图10-12所示,用X10~X15对应机械手的上下左右移行和夹钳松紧的按钮。
按下不同的按钮,机械手执行相应的动作。
在左、右移行的程序中串联上限位置开关的动合触点是为了避免机械手在较低位置移行时碰撞其它工件。
为保证系统安全运行,程序之间还进行了必要的联锁。
如图10-13所示为回原位程序,在系统处于回原位工作状态时,按下回原位按钮(X5为ON),M3变为ON,机械手松开和上升,当升到上限位(X17变为ON),机械手左行,直到移至左限位(X21变为ON)才停止,并且M3复位。
自动程序如图10-14所示,系统工作为单步方式时,X2为ON,其动断触点断开,辅助继电器一般情况下M2 为OFF 。
X3、X4都为OFF,“单周期”和“连续”工作方式被禁止。
假设系统处于初始状态,M10为ON,当按下起动按钮X6时,M2变为ON,使M11为ON,Y0线圈得电,机械手下降。
放开起动按钮后,M2立即变为OFF。
当机械手下降到下限位时,与Y0线圈串联的X16动断触点断开,Y0线圈失电,机械手停止下降。
此时,M11、X16均为ON,其动合触点接通,再按下起动按钮X6时,M2又变为ON,M12得电并自保持,机械手进入夹紧状态,同时M11也变为OFF。
在完成某一步的动作后,必须按一次起动按钮,系统才能进入下一步。
如果选择的是单周期工作方式,此时X3为ON,X2的动断触点接通,M2为ON,允许转换。
在初始步时按下起动按钮X6,在M11电路中,因M10、X6、M2的动合触点和M12的动断触点都接通,所以M11变为ON,Y0也变为ON,机械手下降。
当机械手碰到下限位开关X16时停止下降,M12变为ON,Y4也变为ON,机械手进入夹紧状态,经过1.7s后,机械手夹紧工件开始上升。
这样,系统就会按工序一步一步向前运行。
当机械手在M18步返回原位时,X4为OFF,其动合触点断开,此时不是连续工作方式,因此机械手不会连续运行。
系统处于连续方式时,X4为ON ,它的动合触点闭合,在初始步时按下起动按钮X6,M1得电自保持,选择连续工作方式,其它工作过程与单周期方式相同。
按下停止按钮X7后,M1变为OFF,但系统不会立即停下,在完成当前的工作周期后,机械手最终停在原位。
2.3.2 基本指令配合步进指令的编程方法
运用步进指令编写机械手顺序控制的程序比用基本指令更容易、更直观。
在机械手的控制系统中,手动和回原位工作方式用基本指令很容易实现,这里不重复。
只介绍图10-15所示的顺序功能图,该图实现了机械手的自动连续运行。
图中特殊辅助继电器M8002仅在运行开始时接通。
S0为初始状态,对应回原位的程序。
在
选定连续工作方式后,X4为ON,按下回原位按钮X5,能保证机械手的初始状态在原位。
当机械手在原位时,夹钳松开Y4为OFF,上限位X17、左限位X21都为ON,这时按下起动按钮X6,状态由S0转换到S20,Y0线圈得电,机械手下降。
当机械手碰到下限位开关X16时,X16变为ON,状态由S20转换为S21,Y0线圈失电,机械手停止下降,Y4被置位,夹钳开始夹持,定时器T0启动,经过1.7s后,定时器的触头接通,状态由S21转换为S22,机械手上升。
系统如此一步一步按顺序运行。
当机械手返回到原位时X21变为ON,状态由S27转换为S0,机械手自动进入新的一次运行过程。
因此机械手能自动连续运行。
从图10-15所示的顺序功能图中可以看出,每一状态继电器都对应机械手的一个工序,只要弄清工序之间的转换条件及转移方向就很容易、很直观的画出顺序功能图。
其对应的步进指令梯形图也很容易画出。
2.3.3 基本指令、初始状态指令和步进指令配合的编程方法
初始状态指令顺序控制的程序如图10-16所示。
图(a)为初始化程序,它保证了机械手必须在原位才能进入自动工作方式。
图(b)为手动方式程序,机械手的夹紧、放松及上下左右移行由相应的按钮完成。
在图(c)回原位方式程序中,只需按下回原位按钮即可。
图中除初始状态继电器外,其它状态继电器应使用回零状态继电器S10~ S19。
图(d)为自动方式程序,M8041和M8044都是在初始化程序中设定的,在程序运行中不再改变。
下面是图10-16对应的语句表程序。