投影寻踪评价模型分析解析共22页
投影寻踪方法及应用

投影寻踪方法及应用
投影寻踪方法是一种图像处理技术,主要用于跟踪或寻找图像中的某个目标或区域。
它通过对目标的投影进行分析和处理,从而实现目标的寻找和跟踪。
常见的投影寻踪方法包括:
1. 基于阈值的方法:将图像转换为二值图像,然后使用阈值来提取目标的投影,通过对投影进行分析和处理来实现目标的寻踪。
2. 基于模板匹配的方法:使用预先定义的模板与图像进行比较,通过对比图像中的局部区域与模板的相似度来实现目标的寻踪。
3. 基于特征点的方法:通过检测图像中的特征点,并使用特征点间的相对位置和运动信息来实现目标的寻踪。
4. 基于边缘检测的方法:通过检测图像中的边缘,并利用边缘的形状和分布信息来实现目标的寻踪。
投影寻踪方法在许多领域都有应用,例如:
1. 视频监控:用于实时跟踪目标物体,如行人、车辆等。
2. 机器人导航:用于机器人的自主导航和避障。
3. 动作识别:用于分析和识别人体动作,如姿态跟踪、手势识别等。
4. 医学图像处理:用于跟踪和分析医学图像中的病变和器官。
5. 航空航天:用于航空器或卫星的轨迹预测和跟踪。
总的来说,投影寻踪方法是一种重要的图像处理技术,可以在许多领域中应用,实现目标的寻找和跟踪。
投影寻踪文档
投影寻踪简介投影寻踪,是一种通过使用光影投射来追踪目标位置的技术。
该技术广泛应用于场景重建、虚拟现实和增强现实等领域,其原理是通过使用光源投射光影,然后通过适当的算法和传感器来捕捉和分析光影的变化,从而确定目标的位置和姿态。
原理投影寻踪的原理可以分为以下几个步骤:1.光源投射:先确定一个或多个适当的光源,并投射光线到场景中,使得光线能够形成明显的投影。
常见的光源包括激光、LED灯和投影仪等。
2.光影捕捉:使用适当的光感传感器或相机来捕捉场景中的光影变化。
传感器可以是各种各样的设备,如摄像机、光电二极管等。
3.光影分析:对捕捉到的光影进行分析,提取目标的信息。
这个过程通常涉及图像处理和计算机视觉相关的技术,如边缘检测、物体识别和姿态估计等。
4.目标定位:根据光影分析的结果确定目标的位置和姿态。
通过计算来自多个光源的光线投射点的坐标,并结合已知的场景信息,可以准确地确定目标在场景中的位置和朝向。
应用领域投影寻踪技术在许多领域都有广泛的应用。
场景重建投影寻踪可以用于场景重建,例如建筑物或其他物体的三维建模。
通过将多个光源投射到场景中,然后捕捉和分析光影信息,可以准确地重建场景的三维模型。
虚拟现实投影寻踪在虚拟现实中的应用也非常广泛。
通过投射光线并跟踪目标的位置和姿态,可以实现用户在虚拟场景中的自由移动和与虚拟物体的交互。
增强现实在增强现实中,投影寻踪可以用于将虚拟物体与现实世界进行融合。
通过投射光线并追踪目标的位置和姿态,可以准确地将虚拟物体投影到现实场景中,实现虚拟与现实的交互。
娱乐和体育投影寻踪技术在娱乐和体育领域也有广泛的应用。
例如,通过在体育场馆中使用多个投影仪,可以实现对运动员的实时定位和跟踪,从而提供更好的观赛体验。
未来发展投影寻踪技术在不断发展和演进。
随着计算机技术和传感器技术的进步,我们可以期望看到更加精确和高效的投影寻踪系统。
未来可能出现更小、更智能的传感器设备,以及更高分辨率和更大亮度的投影设备。
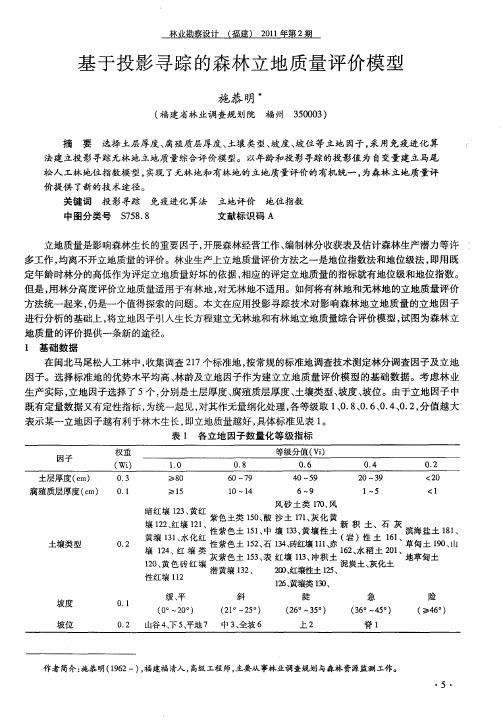
基于投影寻踪的森林立地质量评价模型
3 1 无林地 立 地质量 评价模 型 .
按照免疫进化算法优化投影指标函数的操作步骤, 在解空 间内随机生成种群规模为 2 0 的初始群 0个 体, 取标准差动态调整系数为 3 初始群体的标准差为 1按群体适应度( ) , , 5 式和约束条件( ) , 6 式 将立地 因 子样本集数据代入( ) 4 式 , 1 至( ) 经计算机反复运算 , 最后得到最优投影向量。
地质 量 的评 价 提供一条 新 的途径 。
l 基 础数 据
在 闽北 马尾 松人工 林 中 , 收集调 查 27个标 准地 , 常规 的标 准地调 查技术 测定林 分调 查 因子及 立 地 1 按 因子 。选 择标 准地 的优势 木平均 高 、 林龄 及立地 因子作 为 建立 立地 质量 评 价模 型 的基 础 数 据 。考 虑 林 业
( ) R—r) R一 u(
式 中, z为序列的均值; R为求局部密度的窗 口半径 , 它的选取既要使包含在窗 口内的投影点的平均 个数不太少 , 避免滑动平均偏差太大 , 又不能使它随着 n的增大而增加太快 , 据研究 , 其最佳取值 R= a mx
(J p 2 r为任 意两个样 本 之间 的距 离 , 计算 式为 r =I 一 ; ( ) 单位 阶跃 函数 , r)+ / ; 其 z Iu R一 为 当时 R> 时 , ( )=1否 则 U R一 )= 。 U R一 , ( 0
、
、
、
表
薰誉
・
坡度
坡 位
0. 1
斜
(1 一 5、 2 。 2 。
02 .
山谷 4下 5平地 7 中 3 全坡 6 、 、 、
作者简 : 介 施恭明(92 )福建福清人, 16 一 , 高级工程师, 主要从事林业调查规划与森林资源监测工作。
投影寻踪模型
投影寻踪方法及应用内容摘要:本文从投影寻踪的研究背景出发,给出了投影寻踪的定义和投影指标,在此基础上得出了投影寻踪聚类模型,随后简单介绍了遗传算法。
最后结合上市公司的股价进行实证分析,并给出结论和建议。
关键词:投影寻踪投影寻踪聚类模型遗传算法一、简介(一)产生背景随着科技的发展,高维数据的统计分析越来越普遍,也越来越重要。
多元分析方法是解决高维数据这类问题的有力工具。
但传统的多元分析方法是建立在总体服从正态分布这个假定基础之上的。
不过实际问题中有许多数据不满足正态假定,需要用稳健的或非参数的方法来解决。
但是,当数据的维数很高时,即使用后两种方法也面临以下困难:第一个困难是随着维数增加,计算量迅速增大。
第二个困难是对于高维数据,即使样本量很大,仍会存在高维空间中分布稀疏的“维数祸根”。
对于核估计,近邻估计之类的非参数法很难使用。
第三个困难是对低维稳健性好的统计方法,用到高维时则稳健性变差。
另一方面,传统的数据分析方法的一个共同点是采用“对数据结构或分布特征作某种假定——按照一定准则寻找最优模拟——对建立的模型进行证实”这样一条证实性数据分析思维方法〔简称CDA法)。
这种方法的一个弱点是当数据的结构或特征与假定不相符时,模型的拟合和预报的精度均差,尤其对高维非正态、非线性数据分析,很难收到好的效果。
其原因是证实性数据分析思维方法过于形式化、数学化,受束缚大。
它难以适应千变万化的客观世界,无法真正找到数据的内在规律,远不能满足高维非正态数据分析的需要。
针对上述困难,近20年来,国际统计界提出采用“直接从审视数据出发—通过计算机分析模拟数据—设计软件程序检验”这样一条探索性数据分析新方法,而PP就是实现这种新思维的一种行之有效的方法。
(二)发展简史PP最早由Kruskal于70年初建议和试验。
他把高维数据投影到低维空间,通过数值计算得到最优投影,发现数据的聚类结构和解决化石分类问题。
1974年Frledman和Tukey加以改正,提出了一种把整体上的散布程度和局部凝聚程度结合起来的新指标进行聚类分析,正式提出了PP概念,并于1976年编制了计算机图像系统PRIM——9。
投影寻踪模型

2 投影寻踪评价模型投影寻踪方法最早出现于20世纪60年代末,Krusca 首先使用投影寻踪方法,把高维数据投影到低维空间,通过计算,极大化一个反映数据聚集程度的指标,从而找到反映数据结构特征的最优投影方向。
它是用来分析和处理高维观测数据,尤其是对于非线性、非正态高维数据的一种新型统计方法。
目前已广泛地应用于分类、模式识别、遥感分类、图像处理等领域。
具体应用过程如下: 设投影寻踪问题的多指标样本集为{}n j m i j i x ,,1;,,1),( ==,其中, m 是样本的个数,n 为指标个数。
建立投影寻踪模型的步骤如下:(1)数据预处理:样本评价指标集的归一化处理,消除各指标值的量纲和统一各指标值的变化范围。
对于越大越优的指标:))()(/())(),((),(min max min j x j x j x j i x j i x --=*(1);对于越小越优的指标:))()(/()),()((),(min max max j x j x j i x j x j i x --=*(2);其中,)(max j x )(min j x 为第j 个指标的最大值、最小值。
(2)构造投影指标函数:设A(j)为投影方向向量,样本i 在该方向上的投影值为:∑=*=nj j i X j A i Z 1),()()( (3)即构造一个投影指标函数Q(A)作为确定投影方向优化的依据,当指标达到极大值时,就认为是找到了最优投影方向。
在优化投影值时,要求Z(i)的分布特征应满足:投影点局部尽可能密集,在整体上尽可能散开。
因此,投影指标函数为:Q(A)=S z *D z ,式中:S z — 类间散开度,可用Z(i)的标准差代替;D z — 类内密集度,可表示为Z(i)的局部密度。
其中:2121)}1/(])([{--=∑=m Z i Z S m i z ; )()(11ij m i m j ij z r R I r R D -*-=∑∑== Z —序列{Z (i )|i =1~m }的均值;R 是由数据特征确定的局部宽度参数,其值一般可取0.1*S z ,当点间距值ij r 小于或等于R 时,按类内计算,否则按不同的类记;ij r =| Z(i)一Z(j)|;符号函数I (R -ij r )为单位阶跃函数,当R ≥ ij r 时函数值取1,否则取0。
投影寻踪
∑a
j =1
m
j
x ij
,i=1,2…,n
3.目标函数 目标函数:聚类分析就是对样本群进行合理的分类,可以 目标函数 根据分类指标来构造目标函数,故将目标函数Q(a)定义为类 间距离s(a)与类内密度d(a)的乘积,即Q(a)=s(a)·d(a)。类间 距离用样本序列的投影特征值标准差计算, S(a)愈大,散布愈开。 设投影特征值间的距离
投影寻踪技术是国际统计界于70年代中期发展 起来的、用来处理和分析高维观测数据,尤其是非正 态、非线性高维数据的一种新兴统计方法。它利用 计算机直接对高维数据进行投影降维分析,进行数据 , 客观投影诊断,自动找出能反映高维空间规律的数据 结构,达到研究分析高维数据的目的。
一、产生背景
传统的多元分析方法是建立在总体服从某种分布比 如正态分布这个假定基础之上的,采用 “假定—模 拟—检验”这样一种证实数据分析法(Confirmatory Data Analysis,简称CDA)。 但实际问题中有许多数据并不满足正态分布,需要用 稳健的或非参数的方法去解决。不过,当数据维数很 高时,存在计算量大、维数祸根、稳健性变差等问题。
5.综合评价分析 综合评价分析:根据最优投影方向,便可计算反映各评价指 综合评价分析 标综合信息的投影特征值 zi ,以 zi 的差异水平对样本群进 行综合分析。
密度窗宽参数R的确定 密度窗宽参数 的确定
不同的R值对应不同的最佳投影方向,也就是从不 同角度观测数据样本的特性,对于某一样本群体, 只有选择合理的密度窗宽参数才能得到合理的分类 结果,因此,参数R的取值在模型中非常关键。目 前大多是通过试算或经验来确定,一般认为R的合 理取值为
xij =
x −x x
0 ij 0 max
比较分析四种投影调查技法
比较分析四种投影调查技法什么是投影技法投影技法是一种无结构的非直接的询问形式,可以鼓励被调查者将他们对所关心问题的潜在动机、信仰、态度或感情投射出来。
在投影技法中,并不要求被调查者描述自己的行为,而是要他们解释其他人的行为。
在解释他人的行为时,被调查者就间接地将他们自己的动机、信仰、态度或感情投影到了有关的情景之中。
因此,通过分析被调查者对那些没有结构的、不明确而且模棱两可的“剧本”的反应,他们的态度也就被揭示出来了。
投影技法的应用和心理学中的分类一样,投影技法可分成联想技法、完成技法、结构技法和表现技法。
1)联想技法:在投影技法中,将一种刺激物呈放在被调查者面前,然后询问被调查者最初联想到的事。
在这类技法中最常用的叫词语联想法。
在词语联想中,给出一连串的词语,每给一个词语,都让被调查者回答其最初联想到的词语(叫反应语)。
调研者感爱好的那些词语(叫试验词语或刺激词语)是散布在那一串展示的词语中的,在给出的一连串词语中,也有一些中性的或充数的词语,用于掩盖研究的目的。
例如在对百货商店顾客光顾情况的调研中,试验词语可以选择“位置”、“购物”、“停车场”、“质量”、“价格”之类的词语。
被调查者对每一个词的反应是逐字记录并且计时的,这样反应犹豫者(要花三秒钟以上往返答)也可以识别出来。
调查员记录反应的情况,这样被调查者书写反应语所要求的时间也就得到了控制。
这种技法的潜在假定是,联想可让反应者或被调查者暴露出他们对有关问题的内在感情。
对回答或反应的分析可计算如下几个量:每个反应词语出现的频数;在给出反应词语之前耽搁的时间长度;在合理的时间段内,对某一试验词语,完全无反应的被调查者的数目;根本无反应的被调查者就被判定为是情感卷入造成的反应阻塞。
研究者经常将这些联想分为赞成的、不赞成的和中性的三类。
一个被调查者的反应模式以及反应的细节,可用来决定其对所研究问题的潜在态度或情感。
2)完成技法:在完成技法中,给出不完全的一种刺激情景,要求被调查者来完成。
软件质量综合评价的投影寻踪模型
摘
要 :软 件质 量评价 直接 影响 到 软件 开发 的 质 量 ,软 件 质 量 是 由 多维指 标 因素 决定 的 ,投 影
寻踪模 型 能够将 多维指 标综合投 影 成一 维投 影指 标 ,根 据 该投 影 指 标 值 的 大 小 可 以对软 件 质 量
进行优劣排序。为 了有效地利用投 影寻踪模型降维分析和处理数据的能力、粒子群算法和 多智 能体遗传算法全局快速搜索的能力 ,文中将 粒子群算法和 多智能体遗传算法应用于投影寻踪模 型,建立了软件质量的综合评价模型。实验 结果表 明投 影寻踪模 型为软件质量综合评价提供 了
f a s t s e rc a h c a p a b i l i t y o f p a r t i c l e s w a m r o p t i mi z a t i o n( P S O)a l g o r i h t m a n d m u l t i — a g e n t g e n e t i c a l g o r i t h m
3 . Ma n a g e me n t S c h o o l , U n i v e r s i t y o f S h a n g h a i or f S c i e n c e a n d T ch e n o l o g y , S h a n g h i a 2 0 0 0 9 3 , C in h a)
i n d e x e s t o o n e — d i me n s i o n a l p mj e c t i o n i n d e x , a n d b a s e d o n t h e v a l u e o f i t t h e c o m p r e h e n s i v e e v a l u a t i o n 章编号: 1 0 0 9— 2 5 5 2 ( 2 0 1 4 ) 0 3— 0 0 7 2— 0 4 中图分类号 : T P 3 1 1 文献标识码 : A
投影寻踪算法

投影寻踪算法投影寻踪算法是一种计算机视觉算法,用于从图像或视频中提取出目标的轮廓和运动信息。
它在许多应用领域都有广泛的应用,如目标跟踪、人脸识别、动作捕捉等。
投影寻踪算法的核心思想是通过对图像或视频进行处理,提取出目标的轮廓信息,然后根据目标在连续帧之间的运动信息进行跟踪。
具体而言,投影寻踪算法一般包括以下几个步骤:1. 前景提取:首先需要将目标从背景中分离出来,得到前景图像。
常用的前景提取方法有基于颜色模型、基于纹理模型和基于运动模型等。
这些方法可以根据实际应用场景选择合适的算法。
2. 特征提取:在得到前景图像后,需要对目标进行特征提取,以便后续的目标跟踪。
常用的特征包括轮廓、颜色直方图、纹理特征等。
这些特征可以用来描述目标的形状、颜色和纹理等信息。
3. 目标跟踪:在特征提取后,可以使用不同的跟踪算法对目标进行跟踪。
常用的跟踪算法包括卡尔曼滤波器、粒子滤波器和相关滤波器等。
这些算法可以根据目标的运动模型和观测模型进行目标位置的估计和预测。
4. 跟踪结果评估:为了评估跟踪算法的性能,需要对跟踪结果进行评估。
常用的评估指标包括重叠率、漏检率和错误率等。
这些指标可以用来衡量目标跟踪的准确性和鲁棒性。
投影寻踪算法的优点是可以实时地对目标进行跟踪,并且对光照变化和背景干扰具有一定的鲁棒性。
然而,由于目标在连续帧之间的运动可能存在突变或遮挡等情况,因此在实际应用中仍然存在一些挑战。
总结起来,投影寻踪算法是一种用于目标跟踪的计算机视觉算法。
它通过对图像或视频进行处理,提取出目标的轮廓和运动信息,从而实现对目标的实时跟踪。
投影寻踪算法在许多领域都有广泛的应用,但在实际应用中仍然存在一些挑战,需要进一步研究和改进。
建设项目投资方案优选的参数投影寻踪模型
v0 . 4 No 1 11 .
J .2 0 n a ,0 8
建 设 项 目投 资 方 案 优 选 的 参 数 投 影 寻 踪 模 型
卢纪云
( 新疆志翔工程建设咨询监理[ 要] 针对 建设项 目投 资方案 决策 问题 , 摘 采用 高维 降维技 术一
P C Po co u u l s ctnM dl简称 P c模 P (r etnP r iCa i a o oe, ji s t sf i i P 型) 的建模过程包括 如下几步L : 3 J 步骤 1 样本评价指标集 的归 一化处理 。 : 设各指标 值 的样本集为 { ( ,) :1 n J=1 P}其 中 ( , f 『I J f , , i ) 为第 i 个样本第. 『 个指标值 ; 、 n P分别为样本的个数( 样 本容量 ) 和指标 的数 目。 为消除各指标值 的量 纲和统一各 指标值 的变化范围, 可采用下式进行极值归一化处理 : 对于越大越优的指标
A s at 删l ap i P oebs A Ai ei etet l  ̄ ln ret eio bt c: r pln P Cm dl ae nR G t v m np no yg o nh n s a f d po c sn i g j d i c m 地 , eat runm t—d esndt ioo ies nsaeS eot m retnd- h t u o r ui i ni a tl dm ni c.ot pm np j i i h t l m o an w o p h i oc o r t ncns n r e etn un ecl ti .h st a eo p j tnf co a v u e i a a df s i ec t t oe i t T u , e l f r e i ntnC ea - co t o t b f e oh h l l vy c h v u o c o u i n l
上海市公路网安全宏观评价投影寻踪模型
it cu t yadn bet e et ci n io s ote d e, hc o nycn i r te u — noao n i s jci r t nc d i c b d gu v r i o o t n t h mo l w i n t l s es h b s h o o d s j t e u l h bet ee a ai dx w i t e o i ae cl aigG nt l — e i ta o teo j i v l t n i e e h .R a cdn bsdAce rt e ei A g cv b s cv u o n g l g e n c o
P oe t nP rut d lo h n h i ih yN t r rjci us i Mo e r a g a g wa ewok o f S H
Sa e y M a r s o i a u to f t c o c p c Ev l a i n
L N u ,,Z A I Y 一 H NG F n f n A a g a g ,F NG h un S o e
t eag r h efc v l a ov h lb p i i t n p o lm t a iu etit n c n iin . h o i m fet ey c slet ego a o t z i r be wi v r srsr i o dt s l t i n l m ao h o co o
( . yL brtr f oda dT af n i en f h ns yo d ctn o  ̄ i rt,hn hi 0 0 2 C i ; 1Ke aoaoyo a n rfcE g er go e R i n i t Miir f ua o ,T n i v s yS ag a2 0 9 ,hn t E i Un e i a 2 Sh o o Cil n ier , n u Unvri f i c n .co l f v E ne n A h i i syo S e eadTehooy u i n2 2 0 , i ) i g i g e t c n cn l ,H an 3 0 1 C n g a h a
投影寻踪高维数据
投影寻踪高维数据随着科技的不断发展,我们生活中产生的数据量越来越庞大,这些数据往往包含了丰富的信息。
然而,由于数据的维度过高,我们很难直观地理解和分析这些数据。
因此,投影寻踪高维数据成为了一种常用的数据降维方法,它可以将高维数据映射到低维空间中,以便更好地理解和分析数据。
投影寻踪是一种将高维数据映射到低维空间的技术,它可以保留数据的主要特征,并且能够减少数据的维度。
在进行投影寻踪时,我们需要选择合适的投影方法和投影维度。
常用的投影方法包括主成分分析(PCA)、线性判别分析(LDA)等,它们通过计算数据的特征向量或线性组合来实现数据的降维。
而投影维度的选择则需要考虑数据的特点和分析目标。
投影寻踪高维数据的好处在于可以提高数据的可视化效果和分析效率。
在高维空间中,我们很难直观地理解数据的结构和关系,而将数据投影到低维空间后,我们可以更清晰地看到数据的分布和聚类情况。
此外,降低数据的维度还可以减少计算的复杂性,提高分析的效率。
然而,投影寻踪高维数据也存在一些挑战和限制。
首先,降维过程可能会损失一部分信息,特别是在选择较低的投影维度时。
因此,在进行投影寻踪时,我们需要权衡降维带来的信息损失和分析效果。
其次,不同的投影方法对数据的适应性不同,选择合适的投影方法也需要考虑数据的特点和分析目标。
为了更好地理解投影寻踪高维数据的应用,下面以一个具体的案例来说明。
假设我们要分析一批商品的销售数据,该数据包含了多个特征,如商品的价格、销量、用户评分等。
由于特征较多,我们很难直接分析和理解这些数据。
因此,我们可以将这些数据进行投影寻踪,将其映射到二维平面上。
通过投影寻踪,我们可以清晰地看到商品的销售情况。
例如,我们可以将商品的价格和销量作为投影维度,将商品在二维平面上进行展示。
这样我们可以直观地看到商品的价格和销量之间的关系,进而分析商品的销售策略和市场需求。
此外,我们还可以将商品的用户评分作为第三个维度,将商品在三维空间中进行展示,以更全面地理解商品的市场表现。
投影寻踪模型原理及其应用

式 中 I NT 为 取 整 函 数 。 由 式 (3) 得 对 应 二 进 制 数 ia(j,k,i),它们与n组模型参数cj(i)对应,并把它们 作为初始父代个体群。 编码与解码的逻辑过程:cj(i)~ Ij(i)~ ia(j, k,i)
步骤3:父代个体适应能力评价。
把第i组参数代入式(1)得目标函数值 fi,fi越小表示模型与观测值拟合得 越好,适应能力越强,设第i个个体 的适应能力与fi成反比。 构造选择概率序列{pi},把[0, 1]区间分成n个子区间:(0,p1), (p1,p2),…,[pn-1,pn],它们与n 个个体一一对应,fi越小的个体对 应的子区间长度越大。
越接近,表示样本i与样本j越倾向于分为同一类。按z*(i)值 从大到小排序,据此可把各指标的样本集进行分类。
2 基于加速遗传算法的投影寻踪聚类模型AGA-PPCE
2.2 基于加速遗传算法的投影寻踪聚类模型在气候区划中的应用 气候区划就是把研究区域划分成若干个分区,在同一分区内具有相似的 气候条件,以便调整种植结构,因地制宜地发展农业生产。 表2.1
12.9 11.8 14.1 15.1 14.2 13.7 10.4 13.4
33.6 31.5 35.4 36.0 33.1 33.5 31.1 35.7
–10.1 –8.8 –8.6 –6.2 –9.5 –8.4 –14.5 –11.6
3672.0 3332.8 4047.4 4703.3 4264.2 4005.6 2572.8 3948.9
j=1 j=2 j=3 j=4
气候样本集及其投影值
气候因子j
j=5 j=6 j=7 j=8 j=9 j=10 Nhomakorabea样本 值
年平均 气温/°C z*(i)
投影寻踪评价模型分析解析
3、富营养化评价实例:与参考文献中用“模糊评价法对10 个湖区富营养化作出的评价”结果,可以看出!除湖区4相差1 级以外其余湖区NV-PPR和模糊评价法作出的评价结果完全 一致”模糊评价法作出的评价结果完全一致。
五、结论
1、基于指标规范值的NV-PPR水质评价模型对3类水体的72项指标中的任意 m(2≤m≤72)项指标组合的水质评价都普适、通用,因而该模型不受指 标数多少的限制,并极大的提高了PPR的求解效率和模型精度。 2、 NV-PPR模型的普适性对72项指标以外的其它指标,只要能适当设定这 些指标的参照值及指标值的规范变换式,使计算得到这些指标的各级标 准规范值在表1中72项指标同级标准规范值范围内,则优化得出的 NVPPR(2)和 NV-PPR(3)的模型和分级标准值仍可用于这些指标的水 质评价,而不会有大的偏差,因为用规范值表示的这些指标也与72项指 标的规范指标“等效”。 3、用优化好的 NV-PPR模型作3类水质评价,不再需要编程优化计算,只需 用规范变换式计算出m项指标的规范值,并将m项指标分解为若干个NVPPR(2)和(或) NV-PPR(3)组合表示,直接将指标规范值代入优 化得出的 NV-PPR(2)和 NV-PPR(3)模型计算,就能作出评价,计 算简单,使用方便。 4、此方法不足之处为: NV-PPR(2)和 NV-PPR(3)的组合可以有多种 不同的形式,采用不同的组合获得的最终结果有时难免有一定差异。因 此,可以采用多种组合,将其结果进行比较,进而做出评价。
2、具体方法介绍:在P维空间中随机选取m组0~1区间的随机数 bi(i=1,…,p);令ai=-1+2· bi,||a||=1计算投影指标Q=f(a);按有利于投影指 标增大的原则,通过选配、杂交、变异操作,取得3组共3m个解,从其中 选出m个投影指标大的编码后,回到第二步,开始下一个优选循环;满足 一定循环次数后或根据先验知识决定输出解的时机;将高维数据投影 到一维数轴上,绘出反映数据特征的散点图,作为进一步研究的依据。
投影寻踪和熵权法
投影寻踪和熵权法
投影寻踪(Projection Pursuit)是一种用于高维数据降维和发现数据内在结构的方法。
它的目标是在保持数据关键特征的同时实现降维,帮助揭示数据集的主要结构。
投影寻踪的基本原理是通过对数据进行线性或非线性投影,将数据从高维空间投影到低维空间,并选择最具信息量的投影方向。
最常见的投影方法是优化具有特定目标函数的投影方向,这个目标函数通常与数据内在结构的特征有关。
熵权法(Entropy Weight Method)是一种多指标综合评价方法,常用于多指标决策问题。
它基于信息熵的概念,通过计算各指标的权重,将多个指标的评价结果综合为一个综合指标。
具体而言,熵权法使用信息熵来衡量各指标的不确定性,越大的不确定性对应的指标权重越小。
熵权法的步骤如下:
1.根据具体问题,确定评价指标集合。
2.对每个指标,收集样本数据,计算各指标的数学期望和方
差。
3.计算每个指标的熵值,熵的计算公式为:熵= - Σ (p(i) *
log2(p(i))),其中p(i)表示第i个指标的频率。
4.计算每个指标的权重,权重的计算公式为:权重 = (1-熵) /
Σ (1-熵),确保权重之和为1。
5.进行指标综合评价,根据权重对每个指标的评价结果进行
加权求和,得到综合评价结果。
熵权法在多指标决策、综合评价和排名等领域广泛应用。
它能够从信息熵的角度,系统地考虑各指标的重要性和贡献度,帮助决策者更准确地进行决策和评价。
水资源可持续利用程度评价的投影寻踪模型
ZHANG a Xin—q ,LI Hu i U i—q n 2 i g
( .C H g f yrpw rE gneig i u nU i r t, h n d 10 5 hn ; 1 o eeo do o e n ier ,Sc a nv sy C e gu6 0 6 ,C ia H n h ei
2.C H g fE v r n n n i e r g,N r h n n t u e o a e e o r e n o e e o n i me tE g n e i o n o t C i a I s t t fW tr R s u c s a d h i
e , cn m , eo re n n i n et T ep jc o usimoe rp sdt i odslt nt t y t eo o y rsucsa de v o n . h r et np rut d lsp oe og eago o i e rm o i i o v uo oh
关键词 : 水资源 ; 可持续利用 ; 评价 ; 投影寻踪 中圈分类号 : V 1 T 23 文献标识码 : A 文章编号 :06 3 5 (06 0 — 0 8 0 10 — 9 120 )4 00 — 5
P oet n P rutMo e pidt o r h nieE au t n o rjci u si o dl Ap l C mp e e s v lai f e o v o
p y fr c mp e e sv e au t n f wae e o r e u t i a l u l a o h o o r h n ie v a o o tr r s u c s s sa n b e t i t n, wh c ae c a a tr e y la l i i zi ih r h c ei d b ce r z r t o g t i l ac lt n a d r t n e u t . h u h ,s mp e c u a o ai a r s s l i n ol l
投影寻踪聚类模型应用步骤

2投影寻踪分类模型简介一、投影寻踪分类模型投影寻踪分类模型(Projection Pursuit classification ,简称PPc)的建模过程包括如下几步:步骤1:样本评价指标集的归一化处理。
设各指标值的样本集为{x*(i,j)|i=1,2,…,n; j=1,2,…,p },其中x*(i,j)为第i 个样本第j 个指标值,n,p 分别为样本的个数(样本容量)和指标的数目。
为消除各指标值的量纲和统一各指标值的变化范围,可采用下式进行极值归一化处理:对于越大越优的指标:)(x -)()(x -j)(i,*x =j)(i,x min max min j j x j 对于越小越优的指标: )(x -)(),(*x -(j)x =j)(i,x min max max j j x j i 其中,(j)x max ,)(x min j 分别为第j 个指标值的最大值和最小值,j)(i,x 为指标特征值归一的序列。
步骤2:构造投影指标函数Q(a)。
PP 方法就是把p 维数据{x(i,j)|i=1,2,…,p}综合成以a={a(1),a(2),a(3),…,a(p)}为投影方向的一维投影值z(i)),,()(=)(∑1=j i x j a i z pj i=1,2,…,n然后根据{z(i)|i=1,2,…,n}的一维散布图进行分类。
式(4.2)中α为单位长度向量。
综合投 影指标值时,要求投影值z(i)的散布特征应为:局部投影点尽可能密集,最好凝聚成若干个 点团;而在整体上投影点团之间尽可能散开。
因此。
投影指标函数可以表达成:Q(a)=S z D Z其中,S z 为投影值z(i)的标准差,D z 为投影值z(i)的局部密度,即: 1-E(z))-)((=∑1=2n i z S n i z∑∑1=1=)j)r(i,-u(R ×j))r(i,-(=n j n i Z R D其中,E( z)为序列{z(i)|i=1,2,…,n}的平均值;R 为局部密度的窗口半径,它的选取既要使包 含在窗口内的投影点的平均个数不太少,避免滑动平均偏差太大,又不能使它随着n 的增大 而增加太高,R 可以根据试验来确定; r(i,j)表示样本之间的距离, z(j)-)(=),(i z j i r ;u(t)为一单位阶跃函数,当t ≥0时,其值为1,当t<0时其函数值为0。
工程项目评标的投影寻踪模型
(上接第319页)
了投标标价情况、 反映了投标方案的工期、 反映了工程项 目质量保证情况、 反映了项目的主材用量情况、 反映了投 标企业的施工经验、 反映了投标企业信誉。4 家投标企业 相应指标的统计数据由表 1 所示。
表1 评价指标数据与评标结果
编号
排序
甲 4900 35 乙 4950 37 丙 5050 35 丁 5100 37
(下转第321页)
319
TM
施工,消除噪音。 2.2 解决水循环故障方法 2.2.1 注重管道质量
基于循环冷却水的以上特点,要求管道连接方式考虑温 度、水压、耐腐蚀、间隙使用故障,例如可以通过合理安排 管线坡度和标高、安装排气阀等方法改善水循环故障,在实 际运用中有很强的操作意义。 2.2.2 改善水质
1 项目评标投影寻踪模型
投影寻踪是一种用来处理和分析高维数据的一类统计方 法,其基本思路是将高维数据投影到向低维空间上,寻找出能反 映高维数据结构或特征的投影,以达到研究分析高维数据的 目的【4】。它已广泛应用于涉及多因素影响的综合评价问题中 。 【5,6】
建立投影寻踪模型的步骤如下【3】:
(1)数据归一化。将量纲不相同各个指标数据 xij 进行归一
征值 为:
(3)
(3)构造投影指标 。投影指标பைடு நூலகம்定义为类间距离
与类内密度 的乘积。即
(4)
类间距离 用样本的投影特征值样本方差计算,即
(5)
其中 表示为样本投影特征值均值。
类内密度 则通过投影特征值间的两两距离,
在设计管道时,管道的长度和坡度都应适宜,否则会出 现滴水现象。管道的安装和布置要适合冷凝水的尽快排出, 必要时可以设置水封装置。
注重材料的保温。风管与冷冻水管必须注意保温,因此 总体来讲,管道的保温必须把握好两个方面,一个是保证其 完整性,另一个是密闭性。 2.4 加强各专业配合
区域智力资本评价的投影寻踪模型及其实证研究

力资本的实 际大小 及其 与指标之 间 的关 系。因此 , 为 了能更可靠 、 客观地评价 区域智力资本 , 有必要对其评
价指标体系和综合评价方法再进行深 入研究 。
另一方面 , 影寻踪 分类 ( et nP r iCu— 投 P co us t l i u s ti , e n 简称 P C 技术是一种探 索性分析方法 , rg P) 尤其适 用于高维非线性、 非正态分布数据的分析 、 处理及其 重 要指标筛 选 , 已获得 了广 泛 的应 用 【 1 。本 文尝 试 把 1 J P C技术引入到我国区域智力资本的综合评价与排序 P 研究 中, 以期获得更合理 、 可靠 和客观的评价 结果 。
关 键 词 区域 智 力 资本 投 影 寻 踪
中图分类号
F 2 F 6 . 2 4 0 15
文献标识码
A
文章编号
1 0 —16 (0 0 0 —0 1 —0 0 2 9 5 2 1 )7 13 4
2 世纪是知识经济时代 , 力资本 已成为 区域 经 1 智 济、 社会 、 环境 、 资源等 和谐共存 与获得 持续竞 争优 势 的最重要 源泉之 一 , 区域 内企业 和地方经 济、 对 社会绩 效具有极 大的促进作 用 J也是 企业创新 和利 润增长 , 的关键所在 。 目前 国内外不少学者正在致力于智力资
本评价指标体系及其评 价方法 的研究 , 得 了一 定 的 取
成果 , 赵 海 林 刘 晓 宁 王 学 军 等[ 王 孝 斌 如 2、 3、 引、 等 - 陈钰芬[ 和高亚莉 等[ 从不 同角度 提 出了少则 5、 5 J ] ] 由十几个 指 标、 则 由 8 多 6个指 标组 成 的评 价 指标 体
P C技术建模过 程 不需 要人 为确定 各 评价 指标 的权 P 重, 在高维非线性 、 非正态分布数据处 理中具有独特优 势 , 破 了 因子 分 析 法 、 成 分 分 析 法 、 E 以 及 突 主 D A